
Comparative Study of Online Open Circuit Voltage Estimation Techniques for State of Charge Estimation of Lithium-Ion Batteries



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
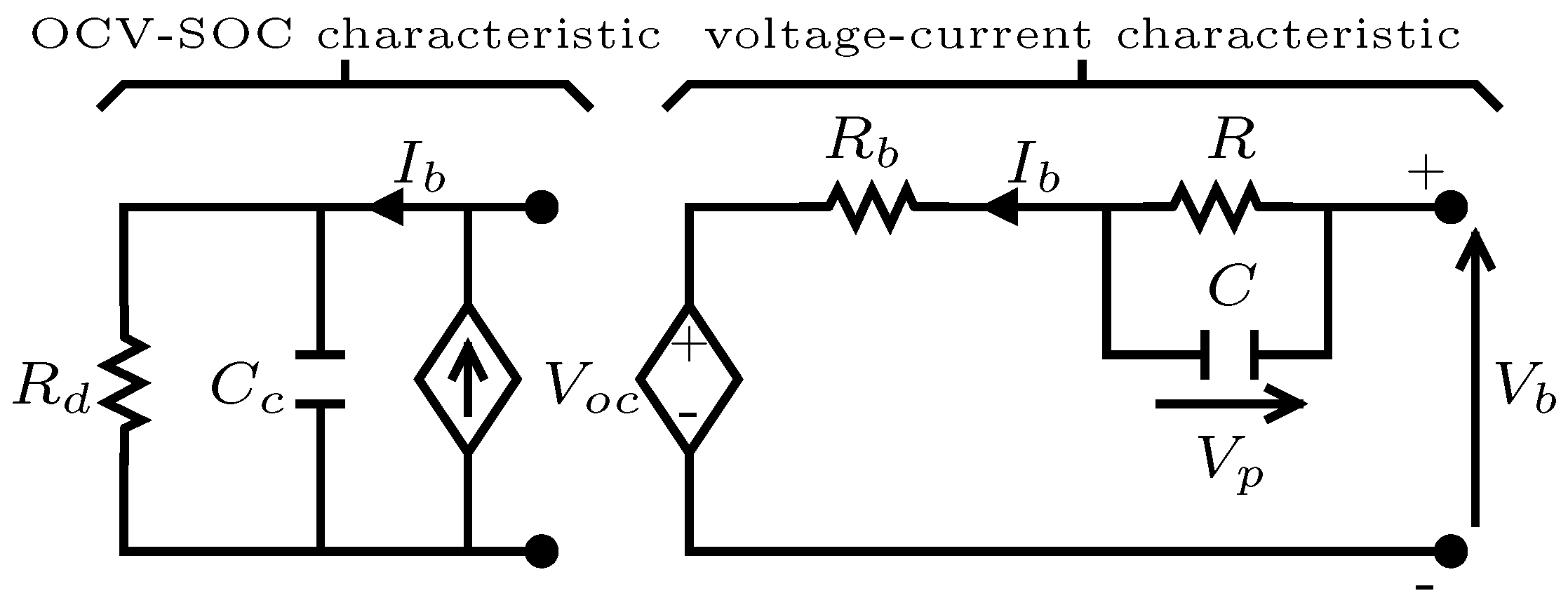
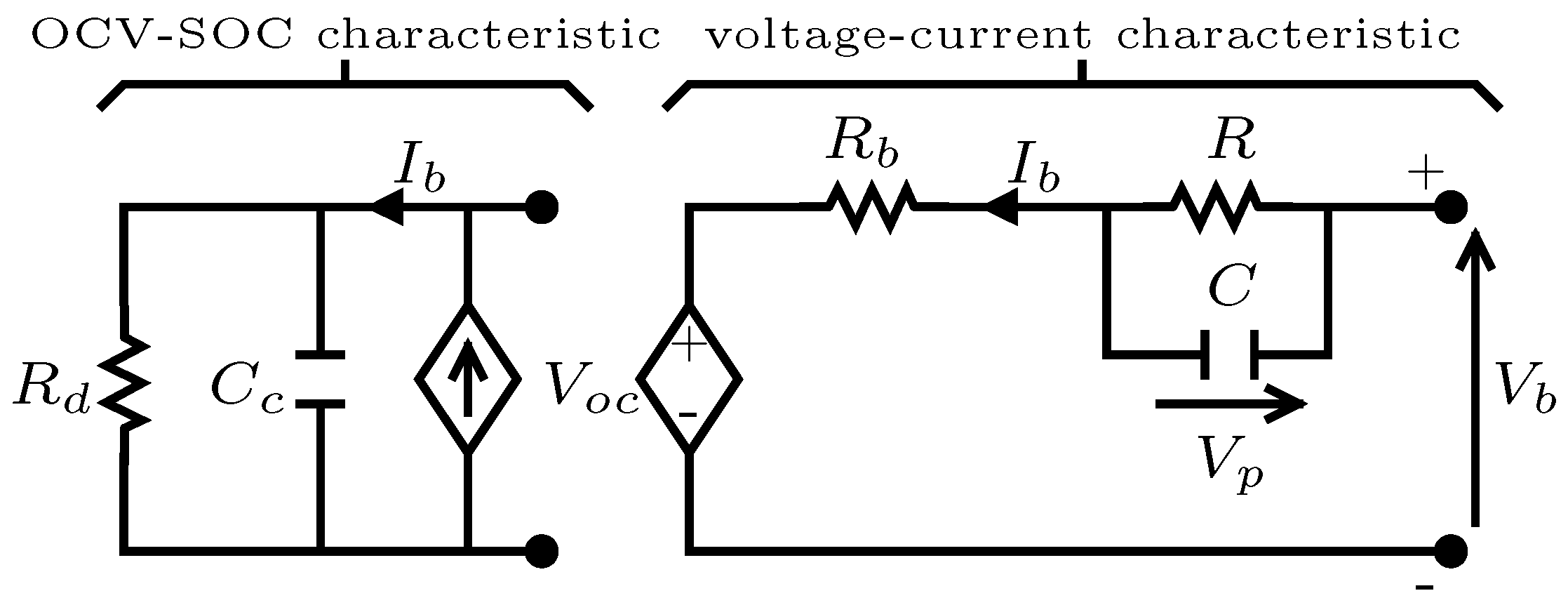
2. Modeling of Lithium-Ion Batteries
3. Online Parameter Estimation
3.1. Least Mean Square Filter
| Algorithm 1 filter. |
 |
3.2. Recursive Least Square Filter
| Algorithm 2 filter. |
 |
3.3. Adaptive Observer
| Algorithm 3 Adaptive Observer [8]. |
 |
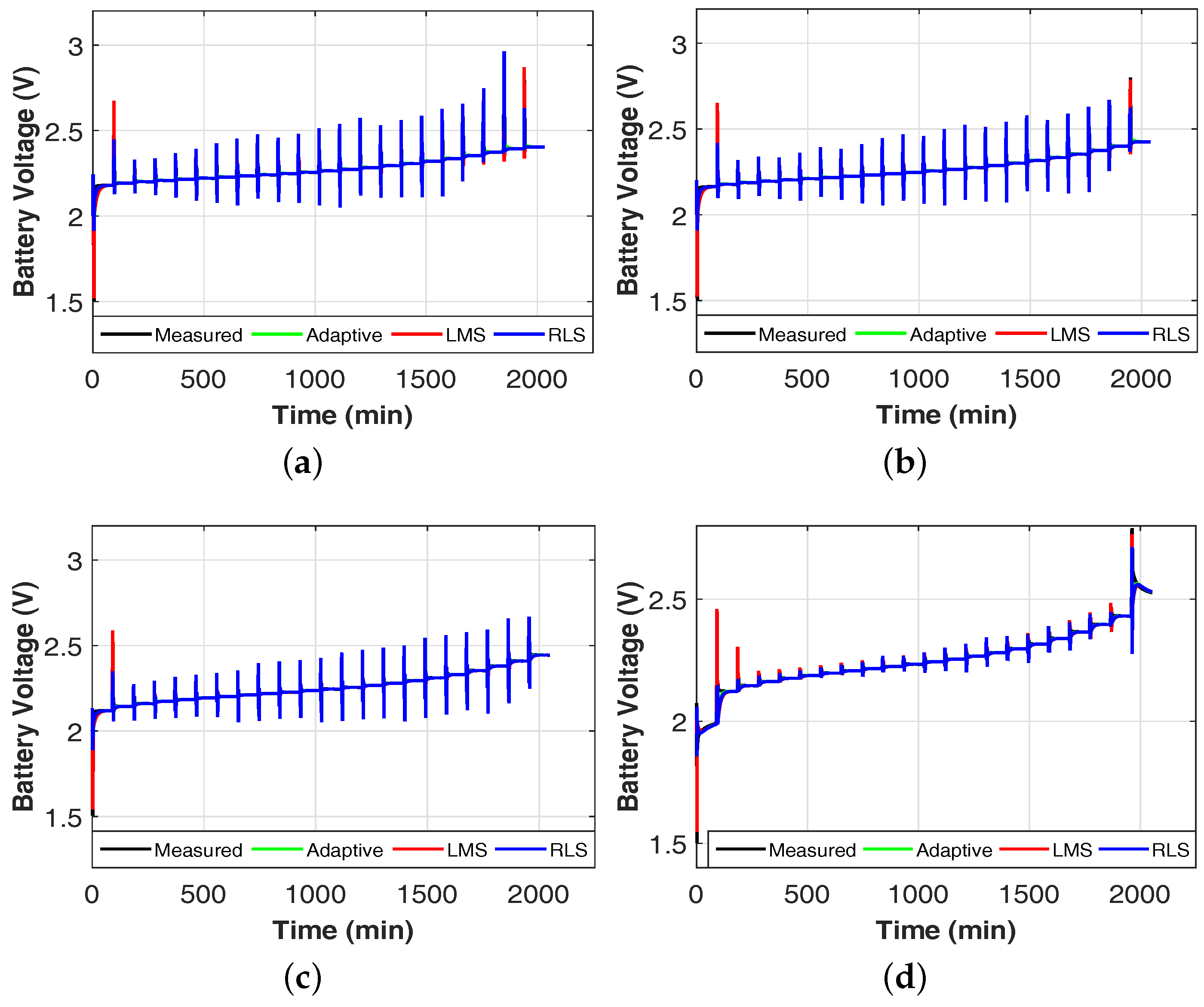
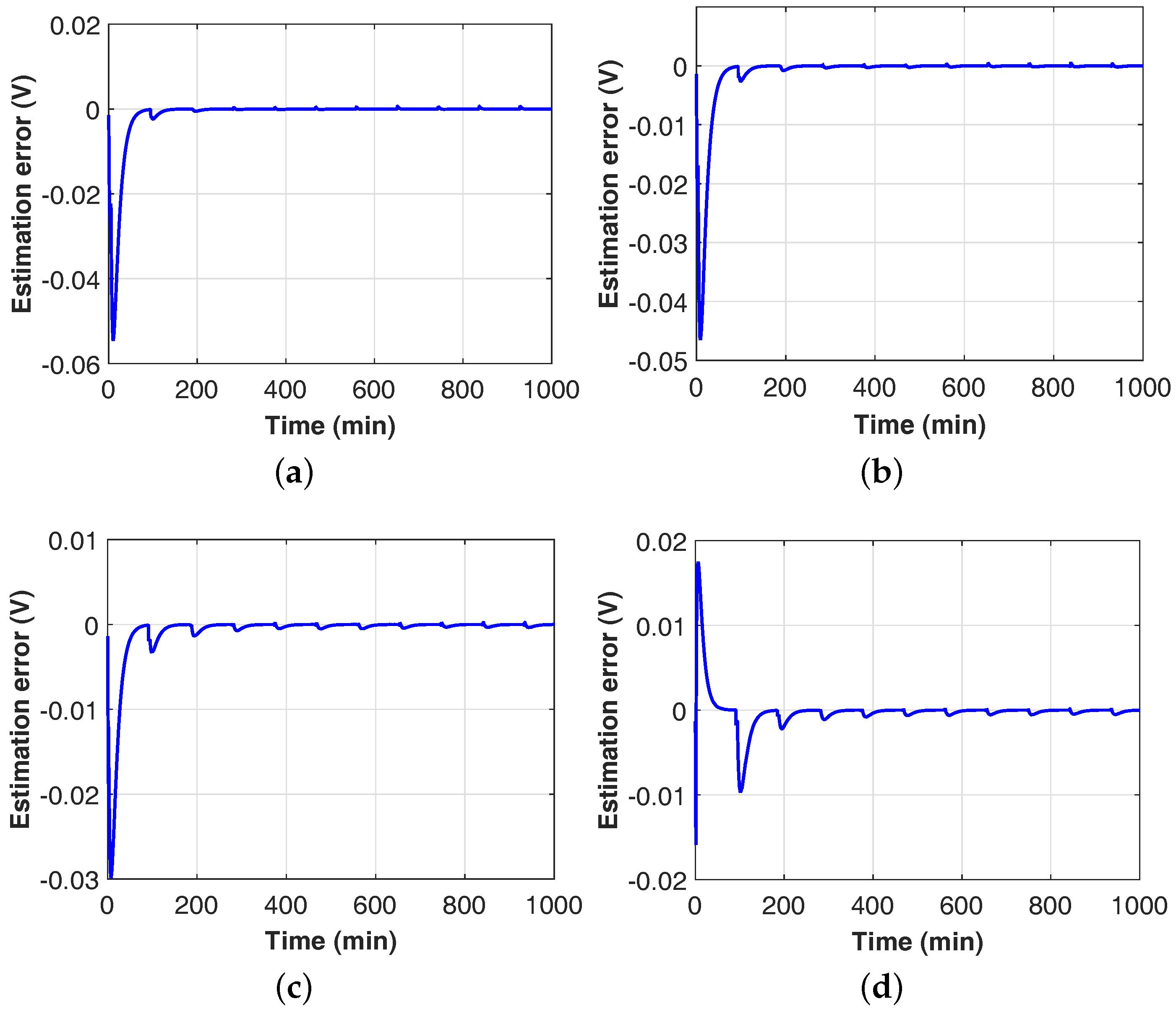
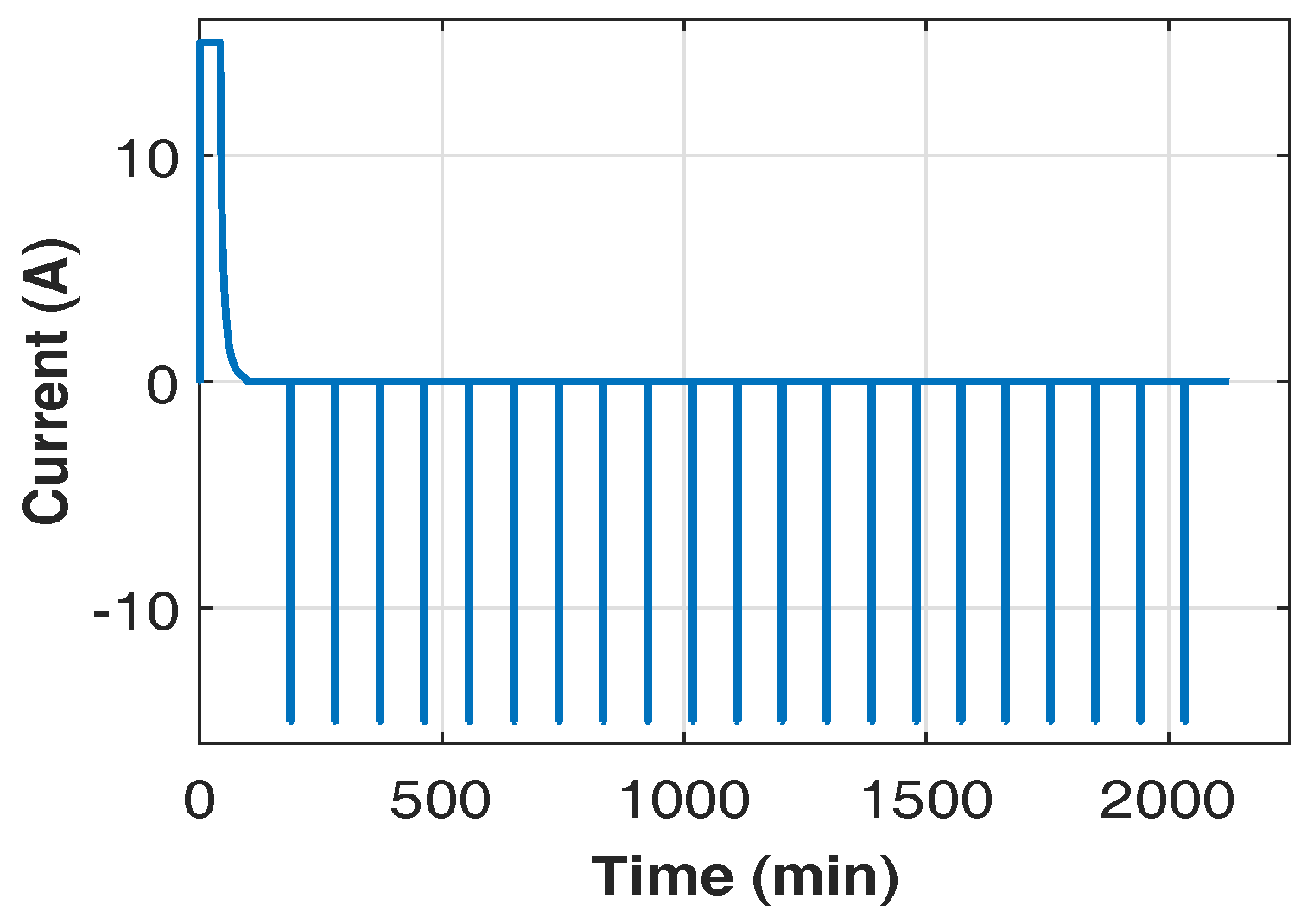
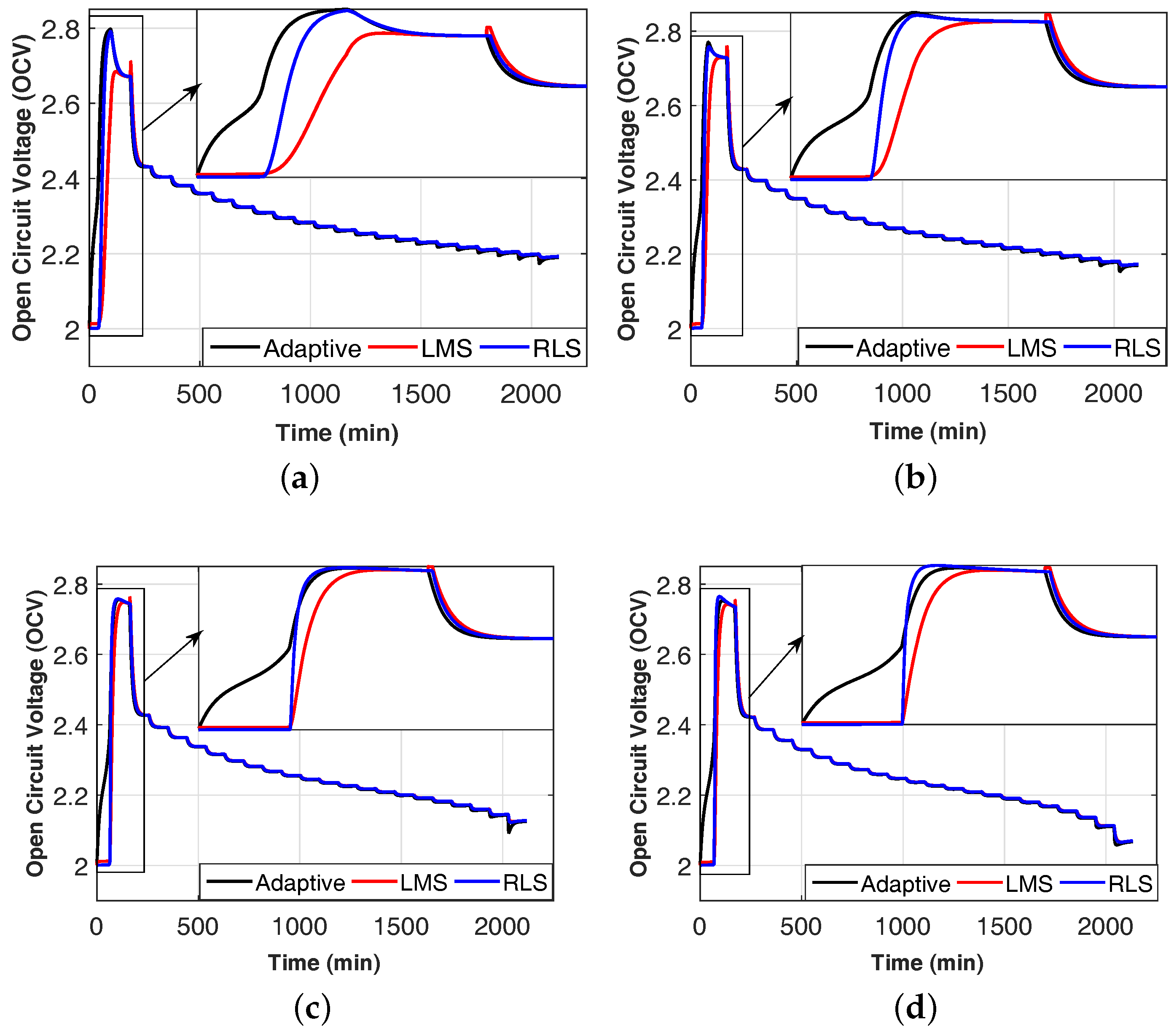
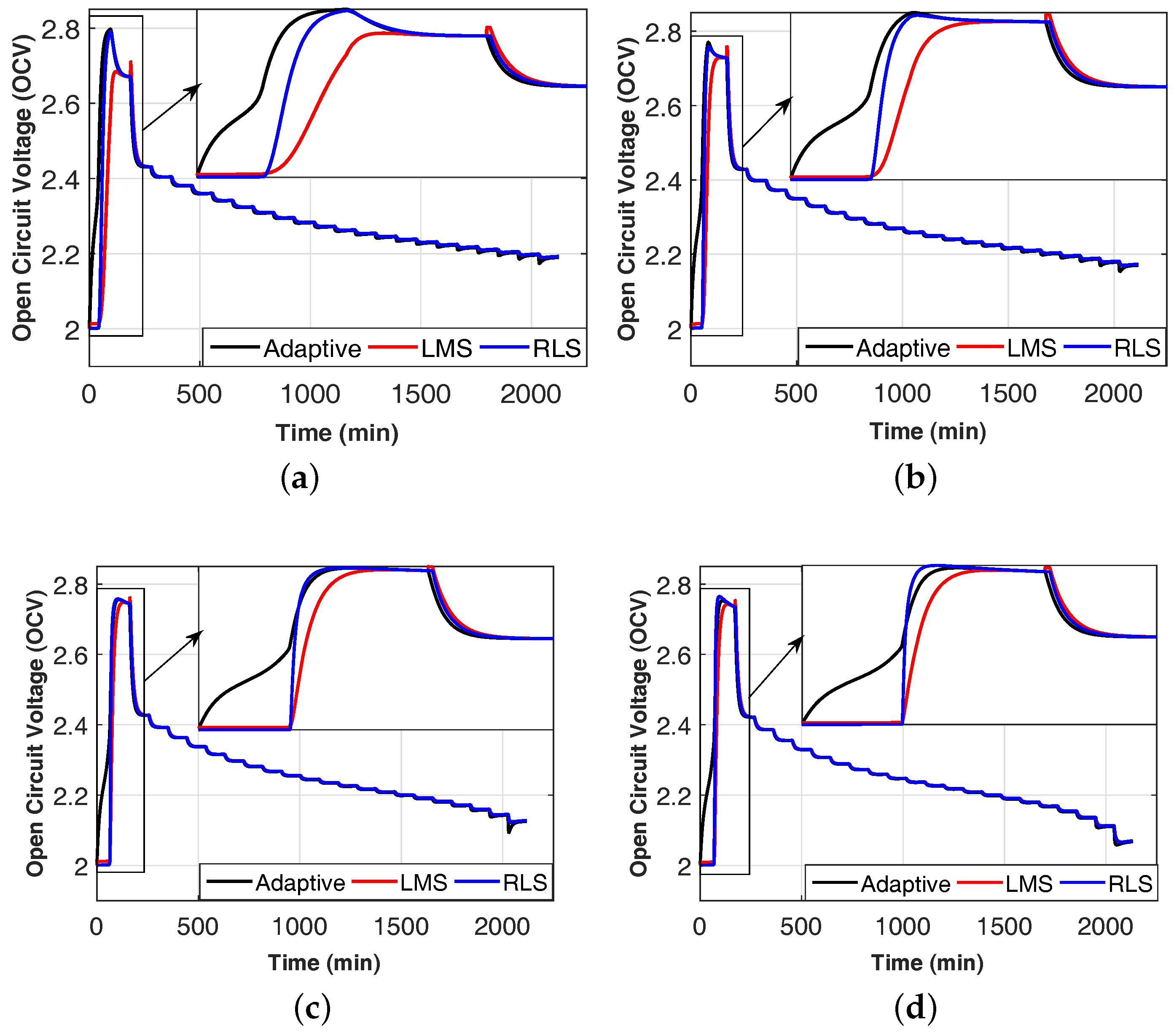
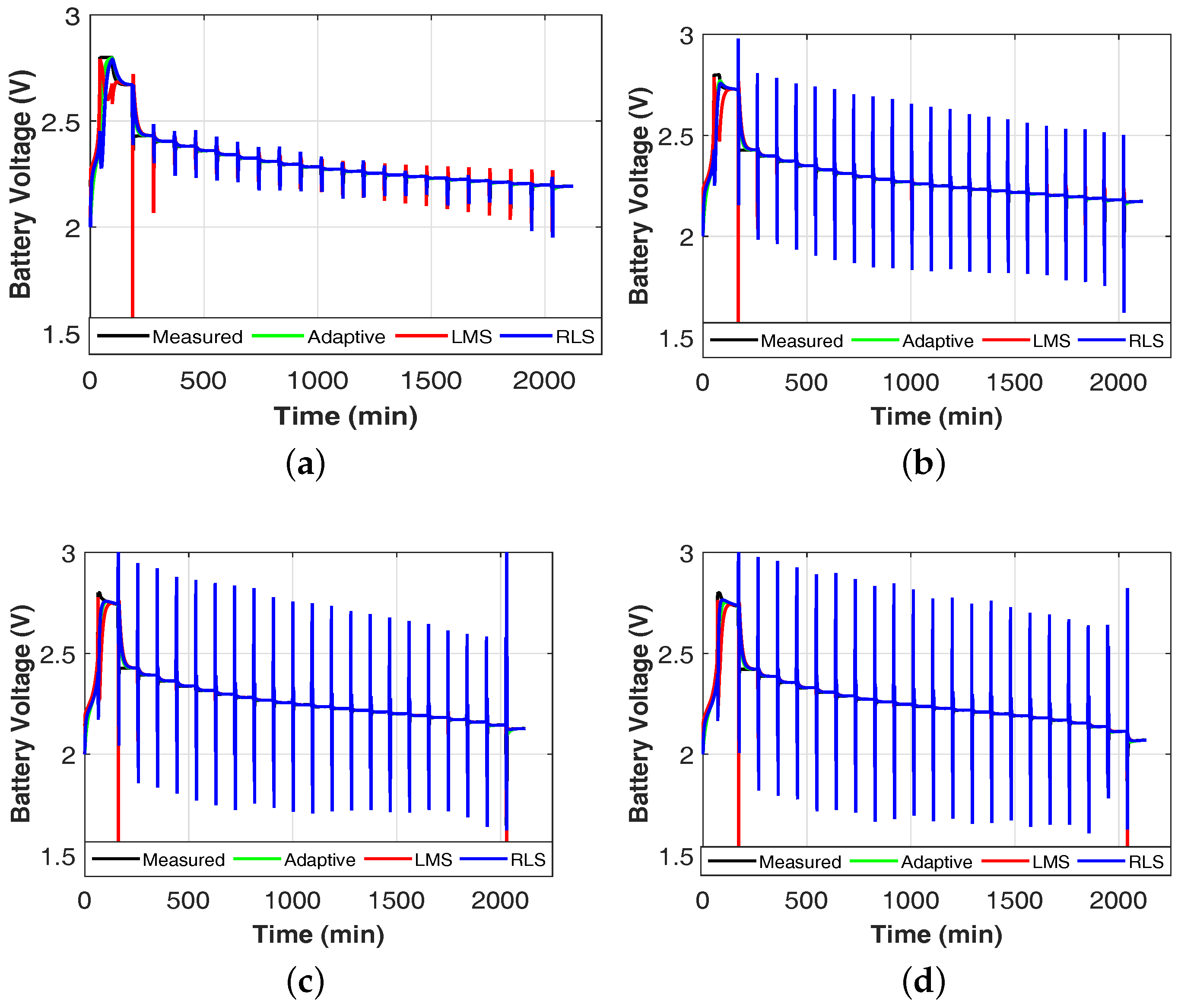
4. Experimental Results
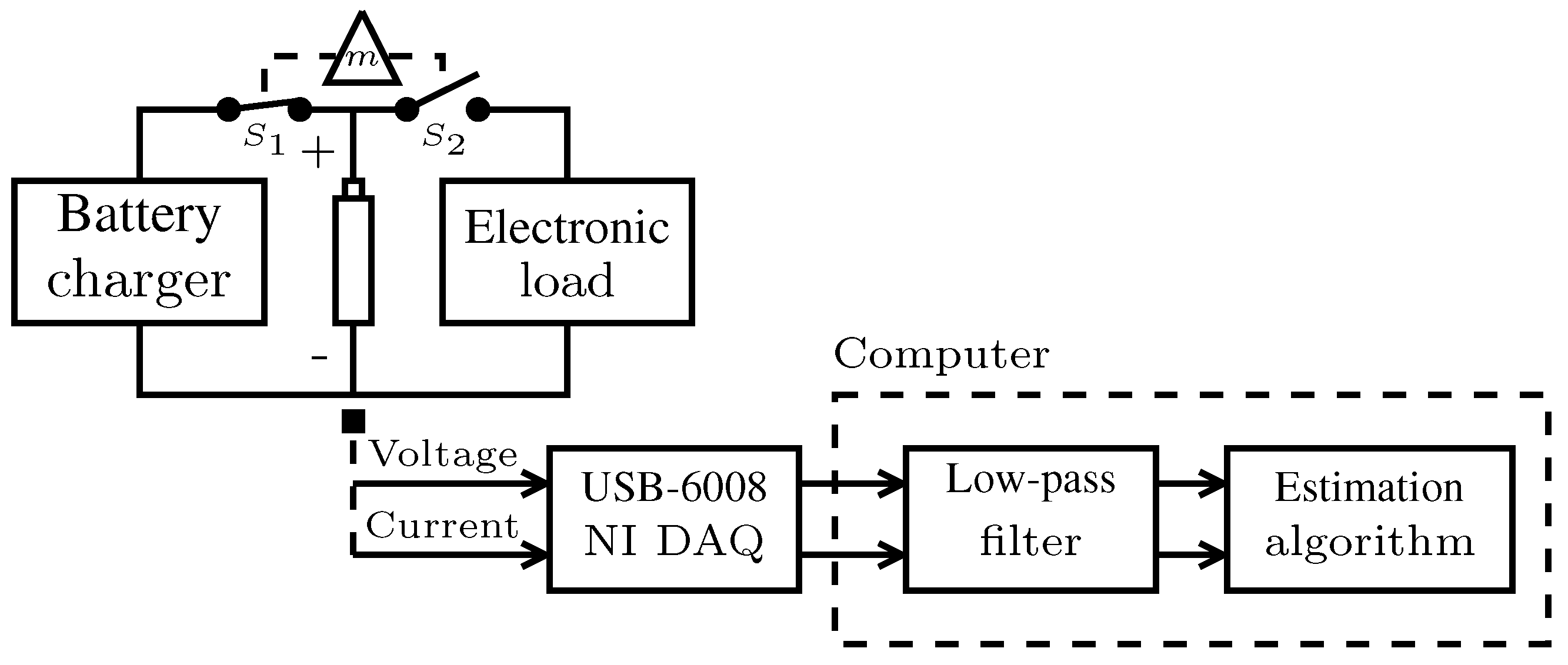
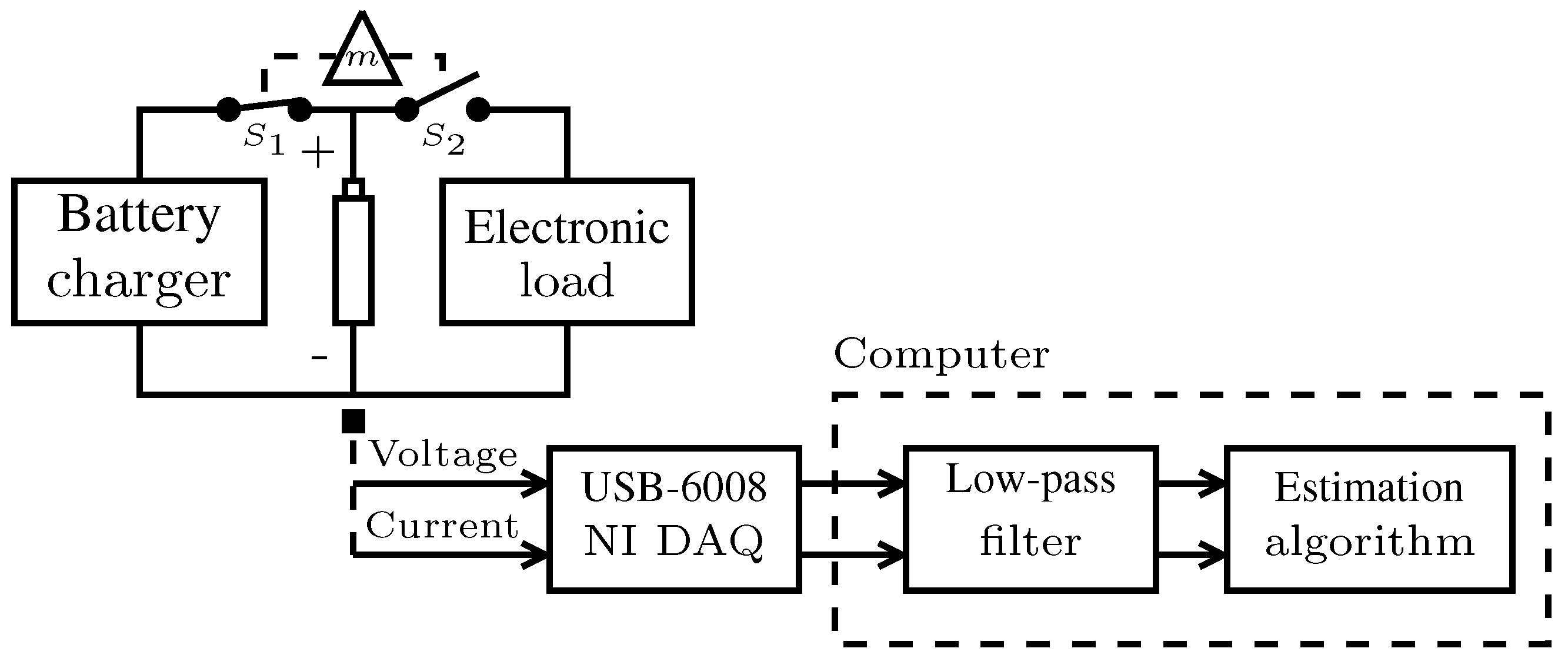
4.1. Setup
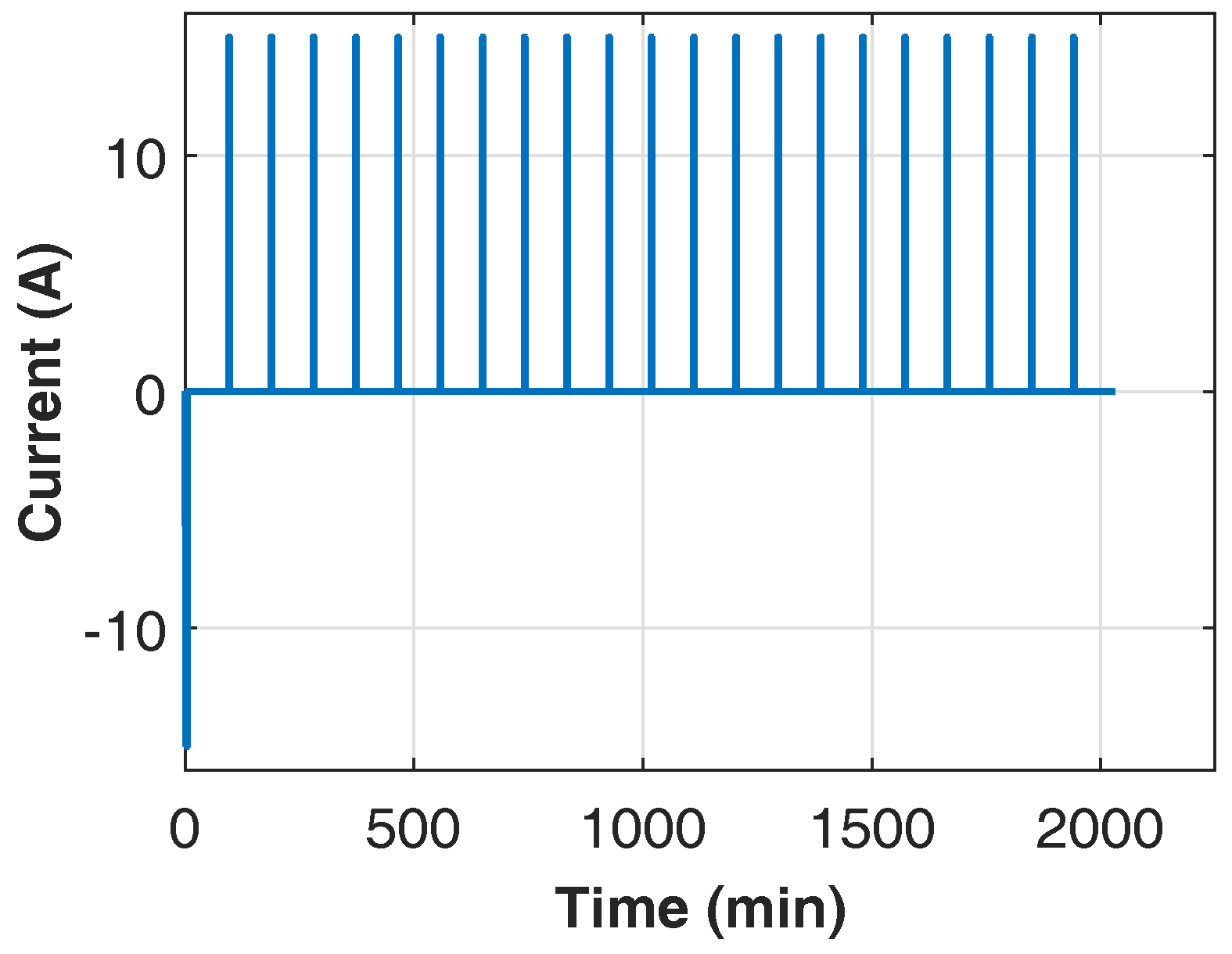
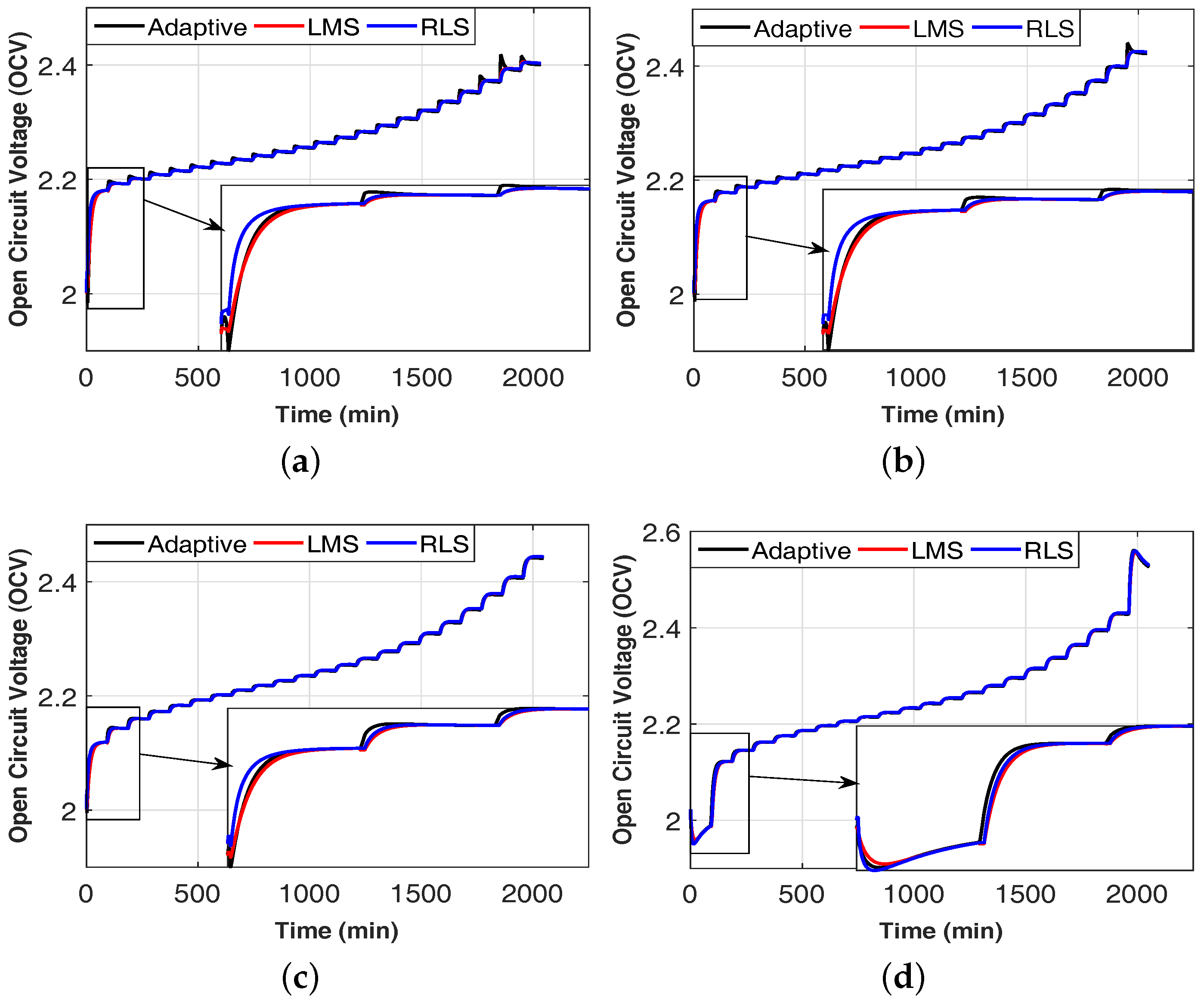
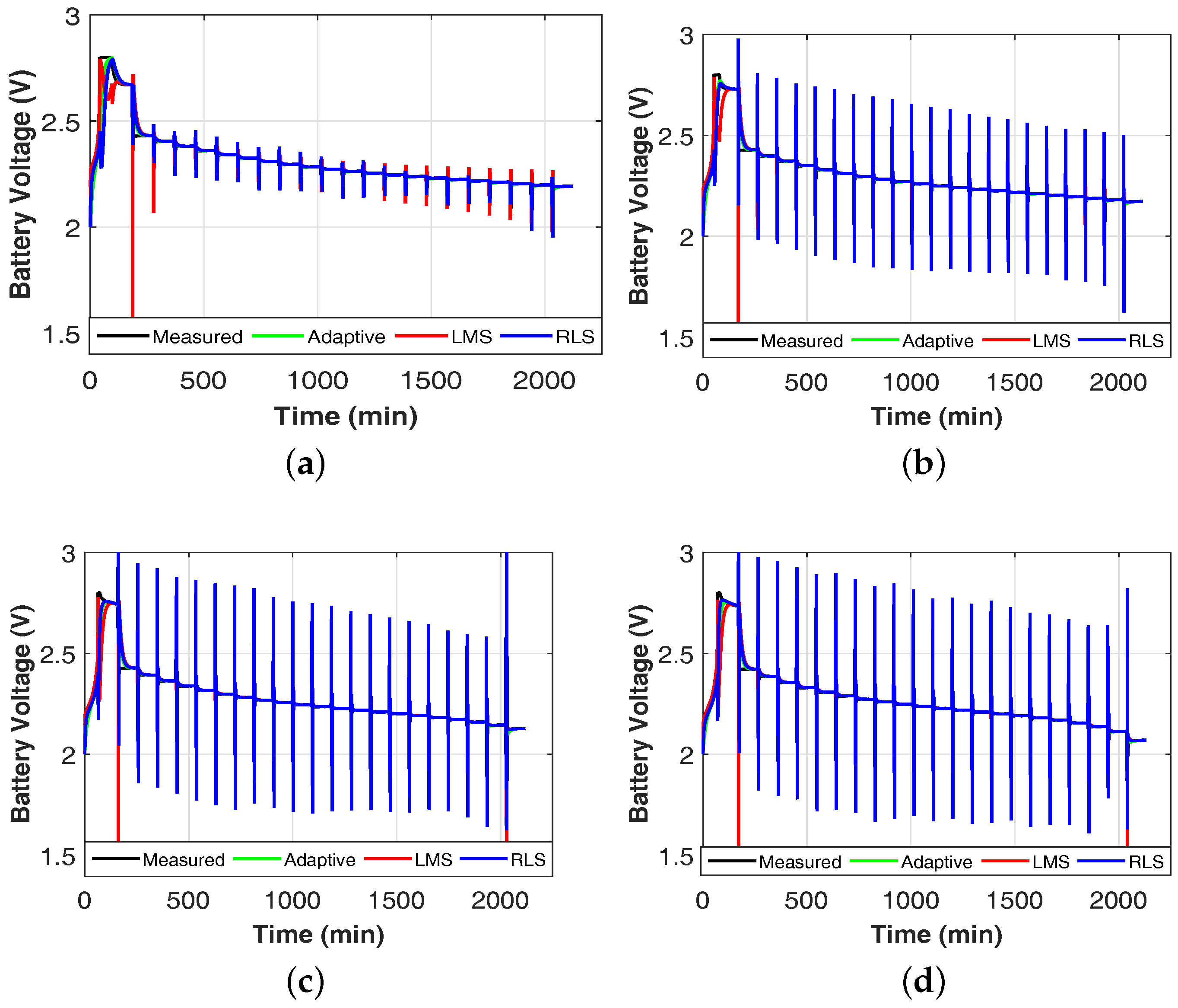
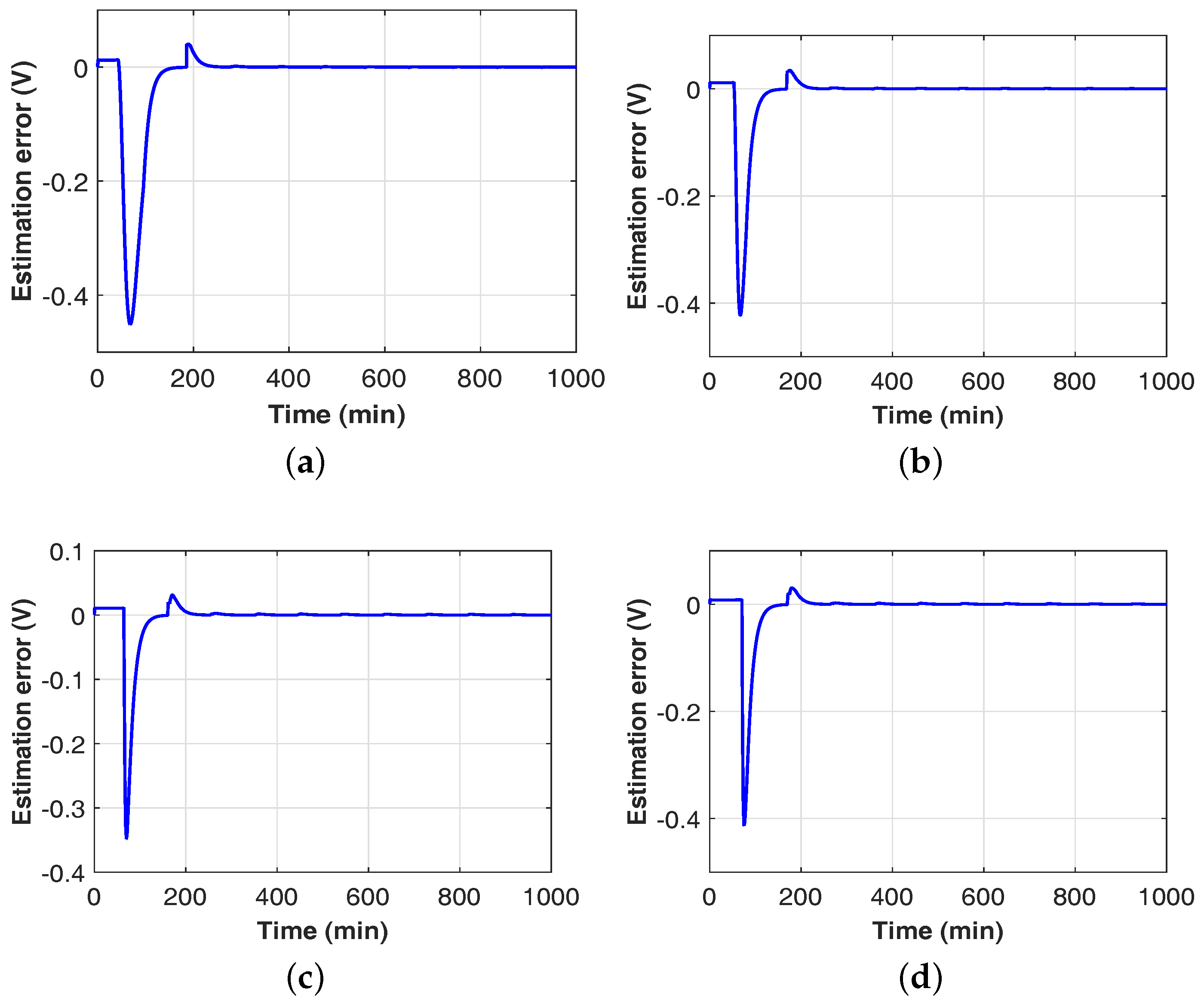
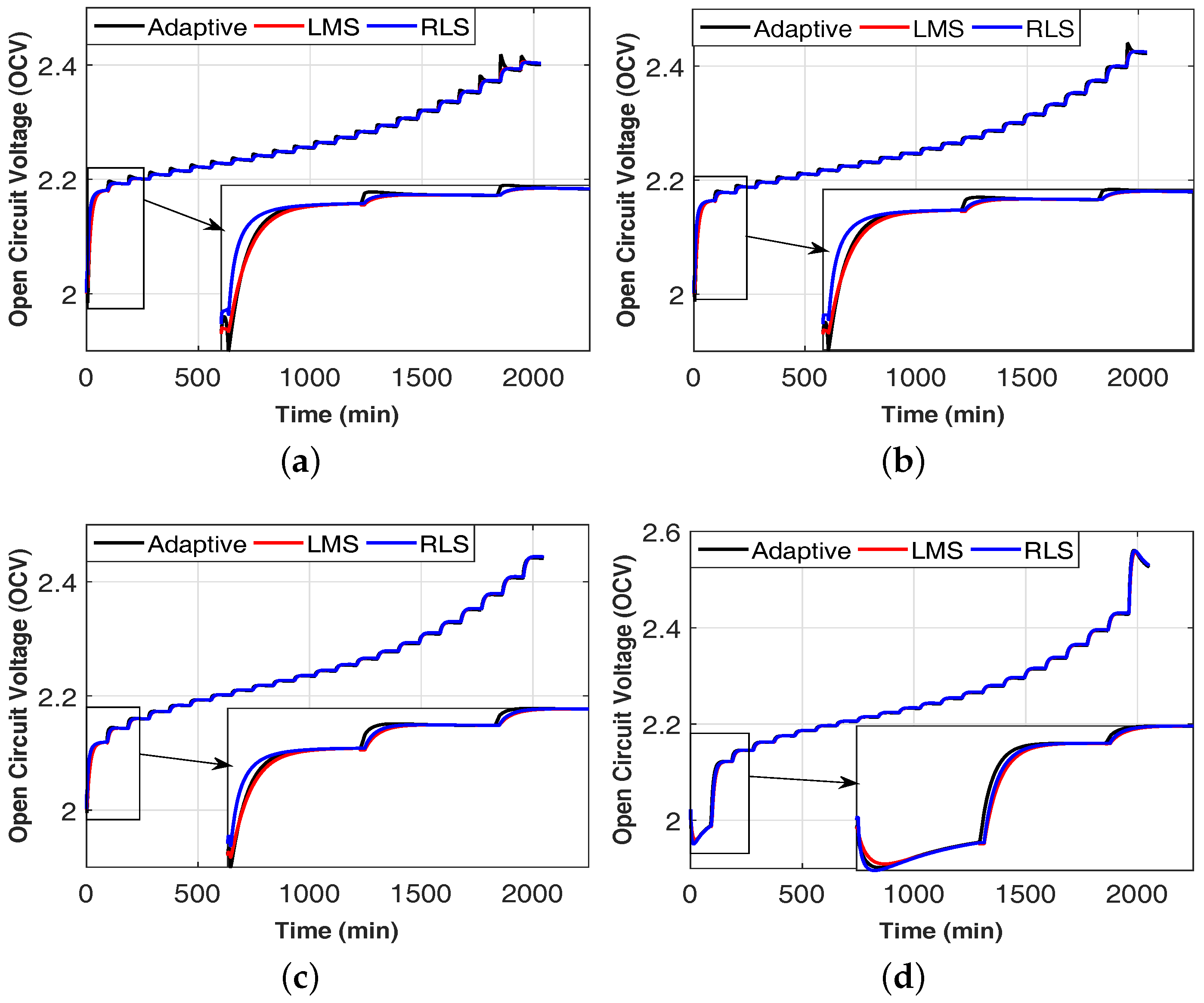
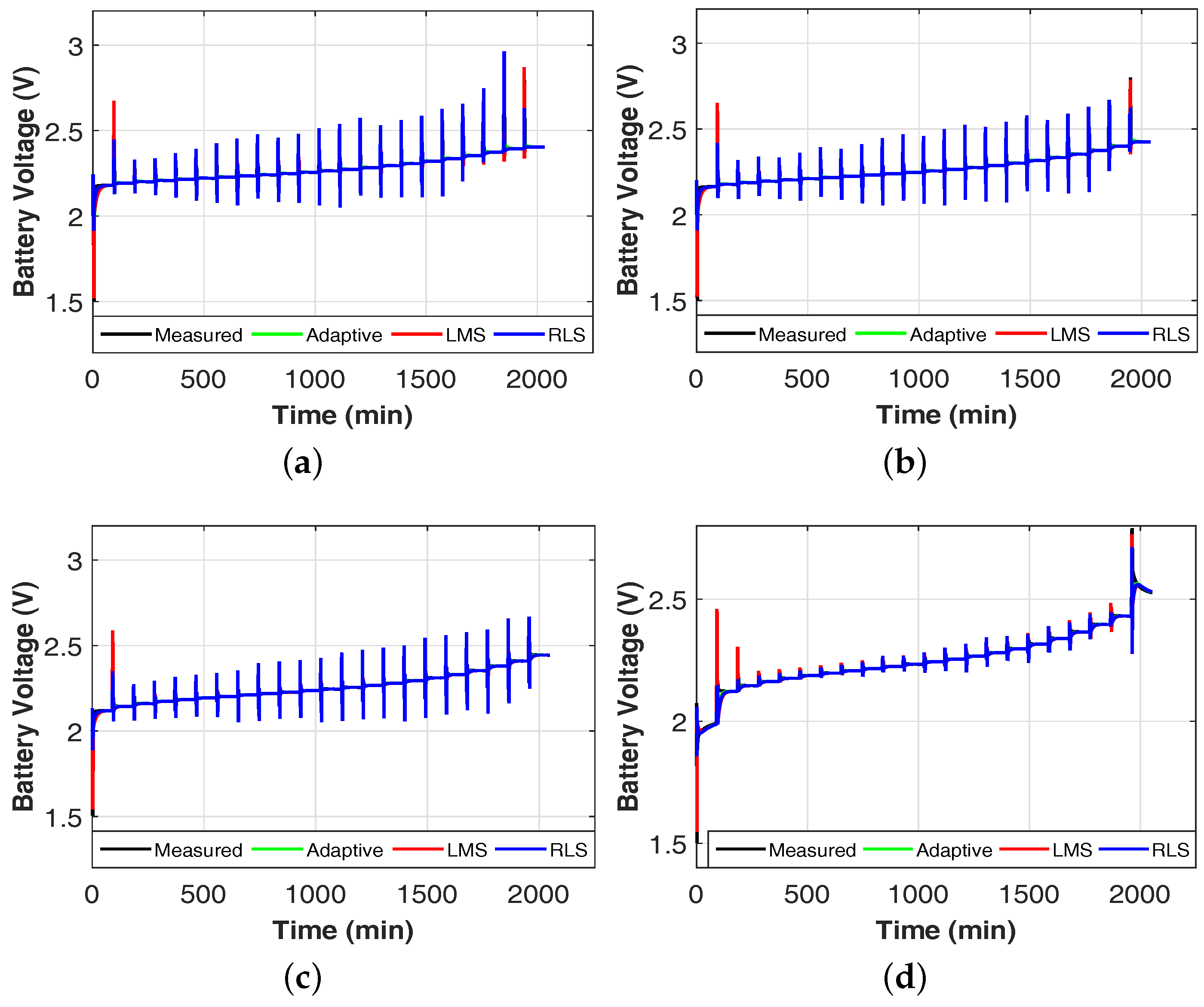
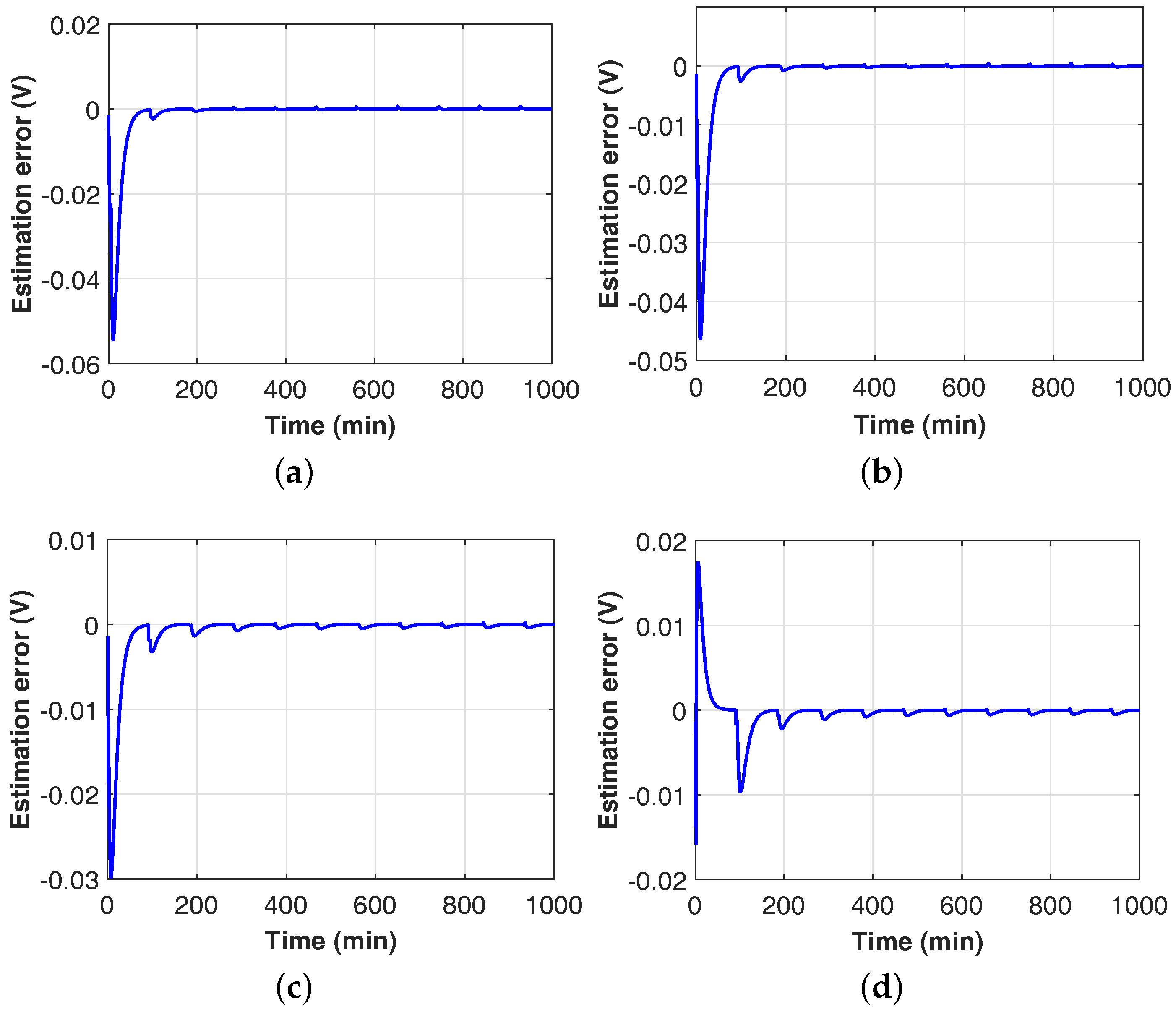
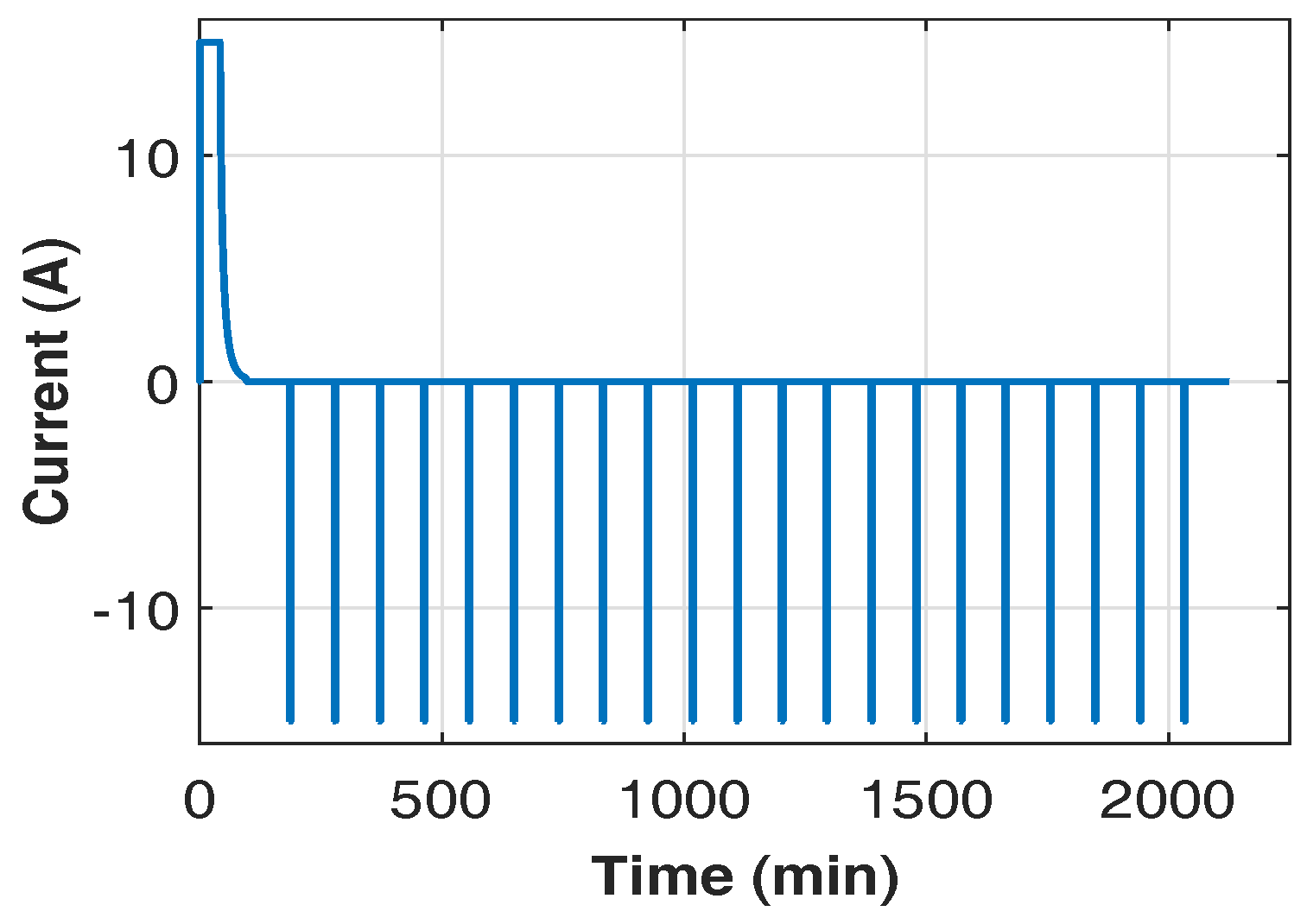
4.2. Results
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Kim, M.Y.; Kim, C.H.; Kim, J.H.; Moon, G.W. A chain structure of switched capacitor for improved cell balancing speed of lithium-ion batteries. IEEE Trans. Ind. Electron. 2014, 61, 3989–3999. [Google Scholar] [CrossRef]
- Kuperman, A.; Levy, U.; Goren, J.; Zafransky, A.; Savernin, A. Battery charger for electric vehicle traction battery switch station. IEEE Trans. Ind. Electron. 2013, 60, 5391–5399. [Google Scholar] [CrossRef]
- Ranjbar, A.H.; Banaei, A.; Khoobroo, A.; Fahimi, B. Online estimation of state of charge in li-ion batteries using impulse response concept. IEEE Trans. Smart Grid 2012, 3, 360–367. [Google Scholar] [CrossRef]
- He, H.; Xiong, R.; Zhang, F.S.; Fan, J. State-of-charge estimation of the lithium-ion battery using an adaptive extended Kalman filter based on an improved Thevenin model. IEEE Trans. Veh. Technol. 2011, 60, 1461–1469. [Google Scholar]
- Chaoui, H.; Golbon, N.; Hmouz, I.; Souissi, R.; Tahar, S. Lyapunov-based adaptive state of charge and state of health estimation for lithium-ion batteries. IEEE Trans. Ind. Electron. 2015, 62, 1610–1618. [Google Scholar] [CrossRef]
- Kim, I.S. Nonlinear state of charge estimator for hybrid electric vehicle Battery. IEEE Trans. Power Electron. 2008, 23, 2027–2034. [Google Scholar]
- Chaoui, H.; Sicard, P. Accurate state of charge (SOC) estimation for batteries using a reduced-order observer. In Proceedings of the 2011 IEEE International Conference on Industrial Technology, Taipei, Taiwan, 14–16 March 2011; pp. 39–43. [Google Scholar]
- Chaoui, H.; Gualous, H. Adaptive state of charge estimation of lithium-ion batteries with parameter and thermal uncertainties. IEEE Trans. Control Syst. Technol. 2016, 25, 752–759. [Google Scholar] [CrossRef]
- Partovibakhsh, M.; Liu, G. An adaptive unscented Kalman filtering approach for online estimation of model parameters and state-of-charge of lithium-ion batteries for autonomous mobile robots. IEEE Trans. Control Syst. Technol. 2014, 23, 357–363. [Google Scholar] [CrossRef]
- Chen, Z.; Fu, Y.; Mi, C.C. State of charge estimation of lithium-ion batteries in electric drive vehicles using extended Kalman filtering. IEEE Trans. Veh. Technol. 2013, 62, 1020–1030. [Google Scholar] [CrossRef]
- Chen, X.; Shen, W.; Dai, M.; Cao, Z.; Jin, J.; Kapoor, A. Robust adaptive sliding-mode observer using RBF neural network for lithium-ion battery state of charge estimation in electric vehicles. IEEE Trans. Veh. Technol. 2016, 65, 1936–1947. [Google Scholar] [CrossRef]
- Paschero, M.; Storti, G.L.; Rizzi, A.; Mascioli, F.M.F.; Rizzoni, G. A novel mechanical analogy-based battery model for SoC estimation using a Multicell EKF. IEEE Trans. Sustain. Energy 2016, 7, 1695–1702. [Google Scholar] [CrossRef]
- Luzi, M.; Paschero, M.; Rossini, A.; Rizzi, A.; Mascioli, F.M.F. Comparison between two nonlinear Kalman Filters for reliable SoC estimation on a prototypal BMS. In Proceedings of the 42nd Annual Conference of the IEEE Industrial Electronics Society, IECON, Florence, Italy, 23–26 October 2016; pp. 5501–5506. [Google Scholar]
- Zhang, Z.L.; Cheng, X.; Lu, Z.Y.; Gu, D.J. SOC estimation of lithium-ion batteries with AEKF and wavelet transform matrix. IEEE Trans. Power Electron. 2016, PP. [Google Scholar] [CrossRef]
- Ma, Y.; Zhou, X.; Li, B.; Chen, H. Fractional modeling and SOC estimation of lithium-ion battery. IEEE/CAA J. Autom. Sin. 2016, 3, 281–287. [Google Scholar]
- Zhang, F.; Liu, G.; Fang, L.; Wang, H. Estimation of battery state of charge with H∞ observer: Applied to a robot for inspecting power transmission lines. IEEE Trans. Ind. Electron. 2011, 59, 1086–1095. [Google Scholar] [CrossRef]
- Lee, Y.-S.; Wang, W.Y.; Kuo, T.Y. Soft computing for battery state-of-charge (BSOC) estimation in battery string systems. IEEE Trans. Ind. Electron. 2008, 55, 229–239. [Google Scholar] [CrossRef]
- Charkhgard, M.; Farrokhi, M. State-of-charge estimation for lithium-ion batteries using neural networks and EKF. IEEE Trans. Ind. Electron. 2010, 57, 4178–4187. [Google Scholar] [CrossRef]
- Lin, H.-T.; Liang, T.J.; Chen, S.M. Estimation of battery state of health using probabilistic neural network. IEEE Trans. Ind. Inf. 2013, 9, 679–685. [Google Scholar] [CrossRef]
- Li, I.-H.; Wang, W.-Y.; Su, S.-F.; Lee, Y.S. A merged fuzzy neural network and its applications in battery state-of-charge estimation. IEEE Trans. Energy Convers. 2007, 22, 697–708. [Google Scholar] [CrossRef]
- Lin, F.-J.; Huang, M.-S.; Yeh, P.-Y.; Tsai, H.C.; Kuan, C.H. DSP-based probabilistic fuzzy neural network control for Li-ion battery charger. IEEE Trans. Power Electron. 2012, 27, 3782–3794. [Google Scholar] [CrossRef]
- Zhang, Y.; Xiong, R.; He, H. Evaluation of the model-based state-of-charge estimation methods for lithium-ion batteries. In Proceedings of the 2016 IEEE Transportation Electrification Conference and Expo (ITEC), Dearborn, MI, USA, 27–29 June 2016; pp. 1–8. [Google Scholar]
- Koirala, N.; He, F.; Shen, W. Comparison of two battery equivalent circuit models for state of charge estimation in electric vehicles. In Proceedings of the 2015 IEEE 10th Conference on Industrial Electronics and Applications (ICIEA), Auckland, New Zealand, 15–17 June 2015; pp. 17–22. [Google Scholar]
- Liu, G.; Lu, L.; Fu, H.; Hua, J.; Li, J.; Ouyang, M.; Wang, Y.; Xue, S.; Chen, P. A comparative study of equivalent circuit models and enhanced equivalent circuit models of lithium-ion batteries with different model structures. In Proceedings of the 2014 IEEE Conference and Expo Transportation Electrification Asia-Pacific (ITEC Asia-Pacific), Beijing, China, 31 August–3 September 2014; pp. 1–6. [Google Scholar]
- Berrueta, A.; Martín, I.S.; Sanchis, P.; Ursúa, A. Comparison of State-of-Charge estimation methods for stationary Lithium-ion batteries. In Proceedings of the 42nd Annual Conference of the IEEE Industrial Electronics Society, IECON, Florence, Italy, 23–26 October 2016; pp. 2010–2015. [Google Scholar]
- Farag, M.S.; Ahmed, R.; Gadsden, S.A.; Habibi, S.R.; Tjong, J. A comparative study of Li-ion battery models and nonlinear dual estimation strategies. In Proceedings of the 2012 IEEE Transportation Electrification Conference and Expo (ITEC), Dearborn, MI, USA, 18–20 June 2012; pp. 1–8. [Google Scholar]
- Xu, J.; Cao, B.; Cao, J.; Zou, Z.; Mi, C.C.; Chen, Z. A comparison study of the model based SOC estimation methods for lithium-ion batteries. In Proceedings of the 2013 IEEE Vehicle Power and Propulsion Conference (VPPC), Beijing, China, 15–18 October 2013; pp. 1–5. [Google Scholar]
- Meng, J.; Luo, G.; Gao, F. State-of-charge estimation for lithium-ion battery using AUKF and LSSVM. In Proceedings of the 2014 IEEE Conference and Expo Transportation Electrification Asia-Pacific (ITEC Asia-Pacific), Beijing, China, 31 August–3 September 2014; pp. 1–6. [Google Scholar]
- Lagraoui, M.; Doubabi, S.; Rachid, A. SOC estimation of Lithium-ion battery using Kalman filter and Luenberger observer: A comparative study. In Proceedings of the 2014 International Renewable and Sustainable Energy Conference (IRSEC), Ouarzazate, Morocco, 17–19 October 2014; pp. 636–641. [Google Scholar]
- Chen, X.; Shen, W.; Cao, Z.; Kapoor, A. A comparative study of observer design techniques for state of charge estimation in electric vehicles. In Proceedings of the 2012 7th IEEE Conference on Industrial Electronics and Applications (ICIEA), Singapore, 18–20 July 2012; pp. 102–107. [Google Scholar]
- Jian, W.; Jiang, X.; Zhang, J.; Xiang, Z.; Jian, Y. Comparison of SOC estimation performance with different training functions using neural network. In Proceedings of the 2012 UKSim 14th International Conference on Computer Modelling and Simulation, Cambridge, UK, 28–30 March 2012; pp. 459–463. [Google Scholar]
- Chen, M.; Rincon-Mora, G.A. Accurate electrical battery model capable of predicting runtime and I-V performance. IEEE Trans. Energy Convers. 2006, 21, 504–511. [Google Scholar] [CrossRef]


© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chaoui, H.; Mandalapu, S. Comparative Study of Online Open Circuit Voltage Estimation Techniques for State of Charge Estimation of Lithium-Ion Batteries. Batteries 2017, 3, 12. https://doi.org/10.3390/batteries3020012
Chaoui H, Mandalapu S. Comparative Study of Online Open Circuit Voltage Estimation Techniques for State of Charge Estimation of Lithium-Ion Batteries. Batteries. 2017; 3(2):12. https://doi.org/10.3390/batteries3020012
Chicago/Turabian StyleChaoui, Hicham, and Sravanthi Mandalapu. 2017. "Comparative Study of Online Open Circuit Voltage Estimation Techniques for State of Charge Estimation of Lithium-Ion Batteries" Batteries 3, no. 2: 12. https://doi.org/10.3390/batteries3020012