
Research on High-Precision, Low Cost Piezoresistive MEMS-Array Pressure Transmitters Based on Genetic Wavelet Neural Networks for Meteorological Measurements

Abstract
:1. Introduction
2. Hardware Design, Software Compensation Algorithm and Experiment Setup
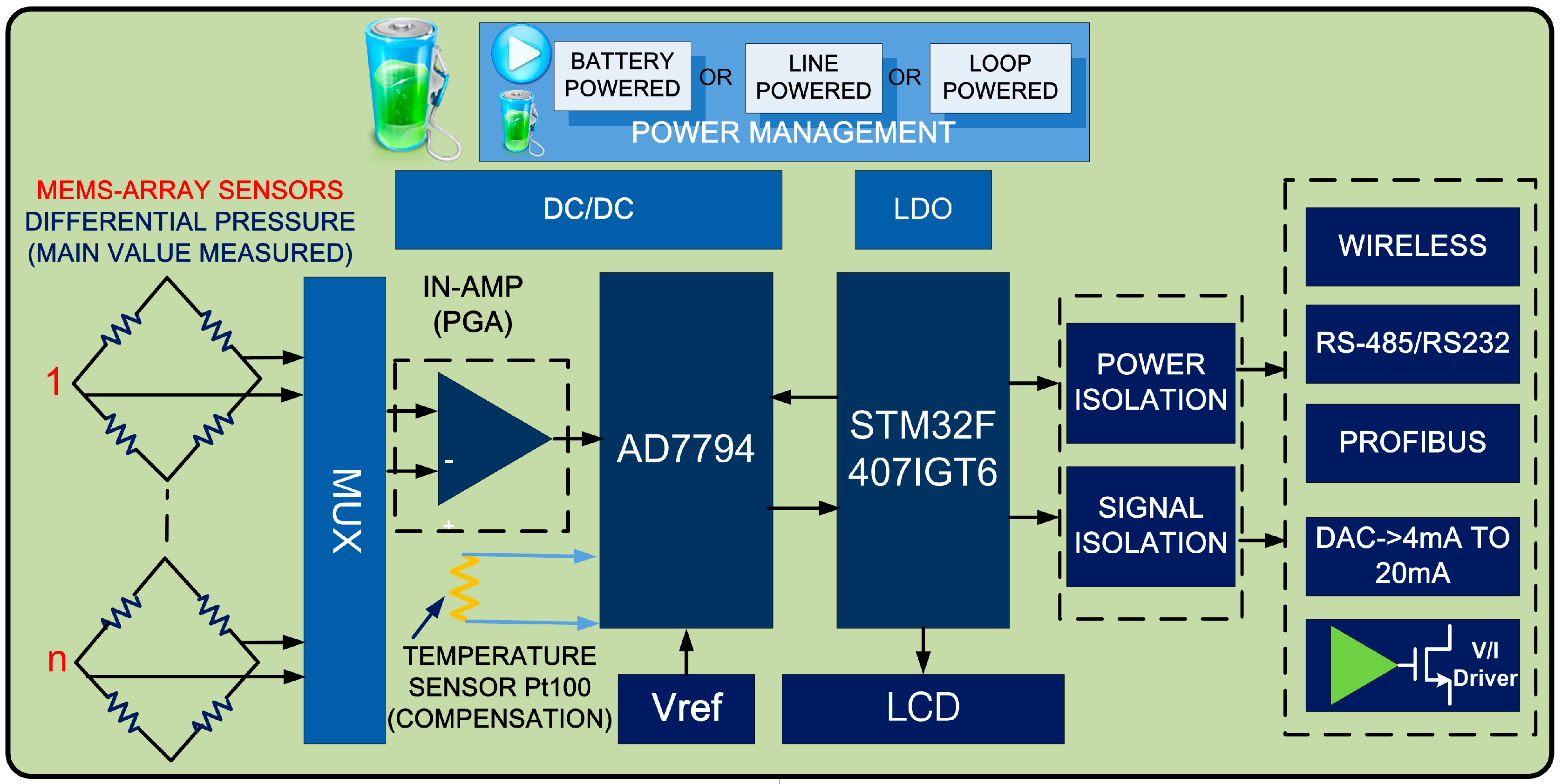
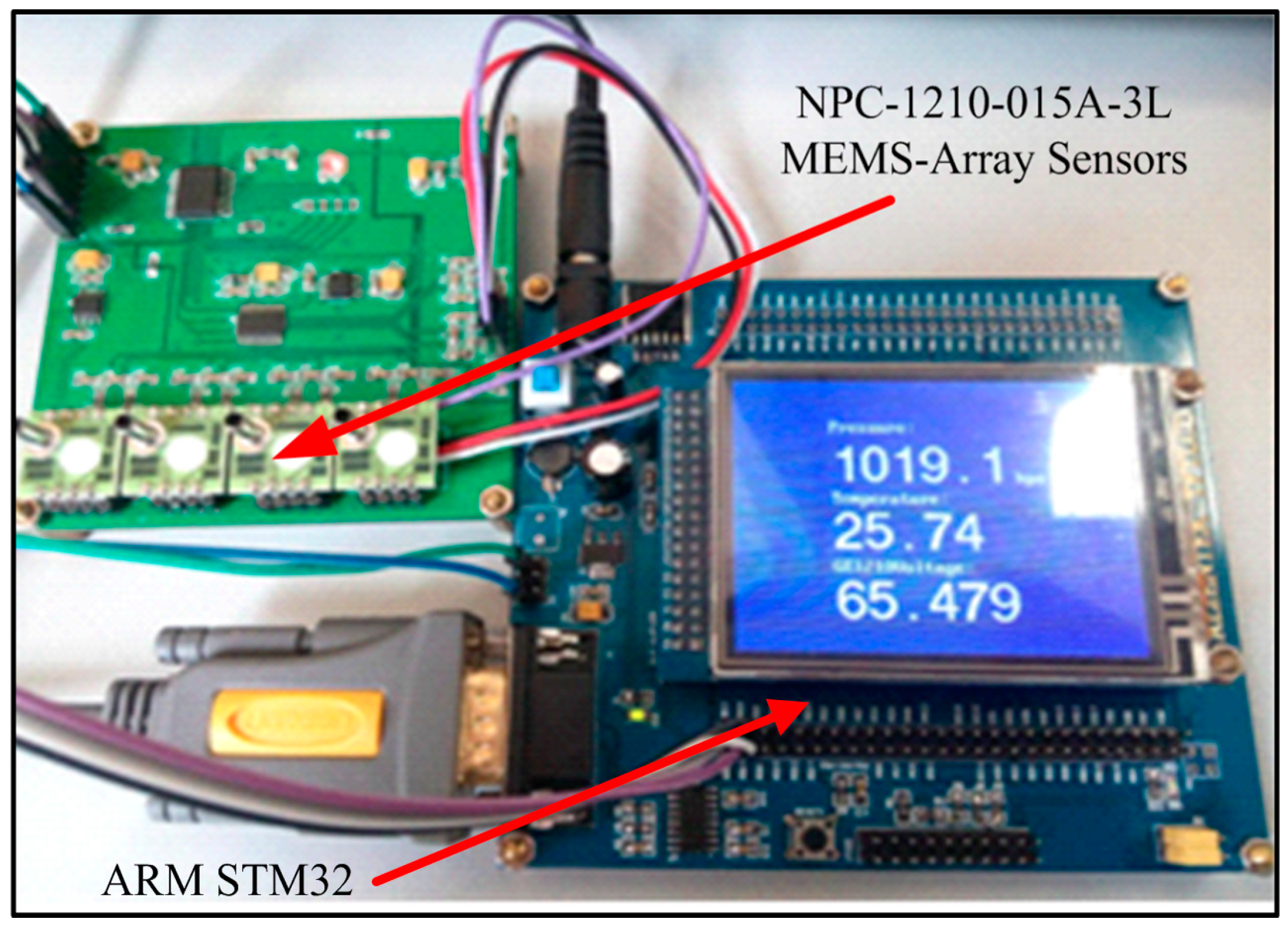
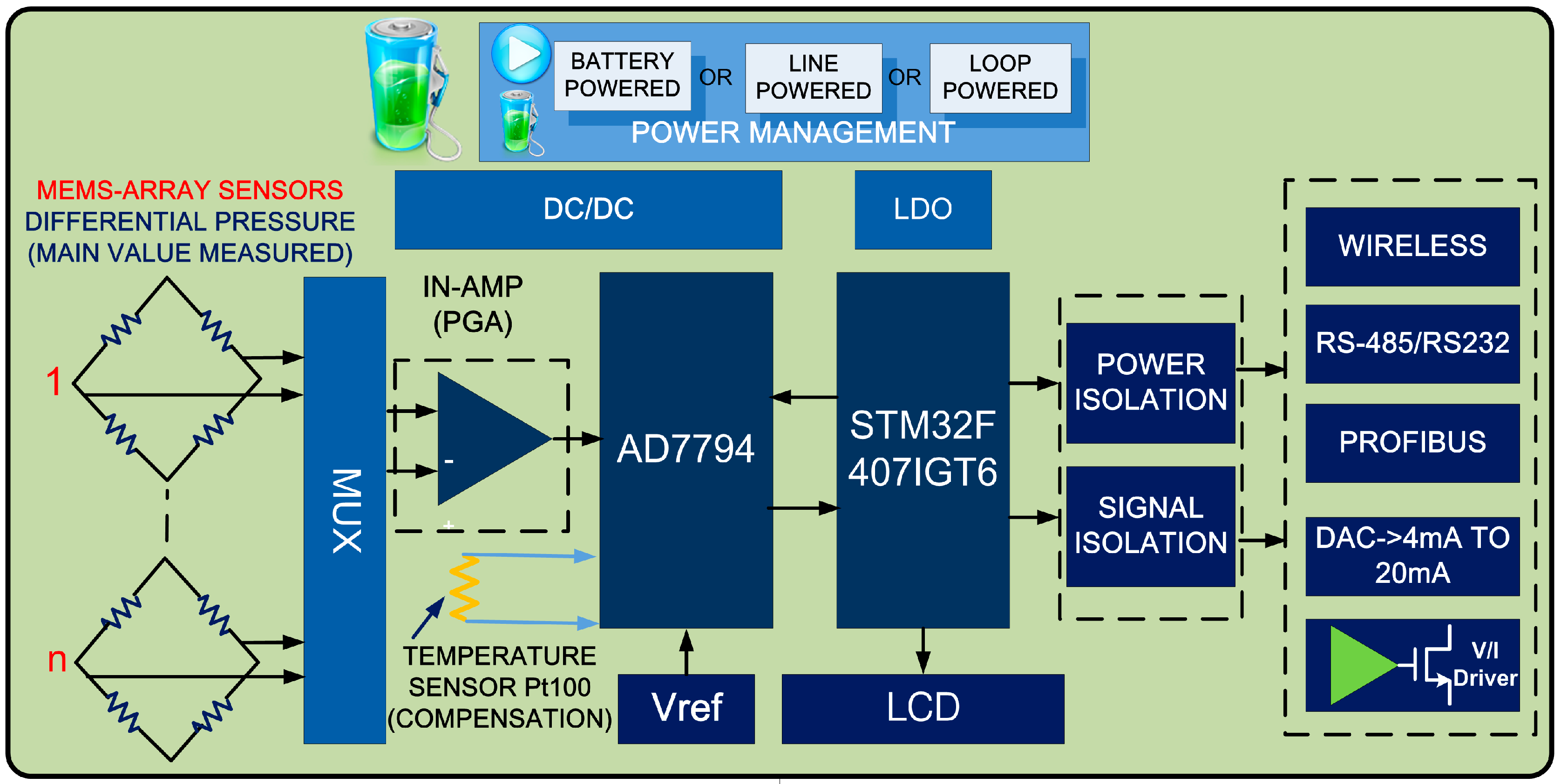
2.1. Optimized Hardware Design for the Piezoresistive MEMS-Array Pressure Transmitter
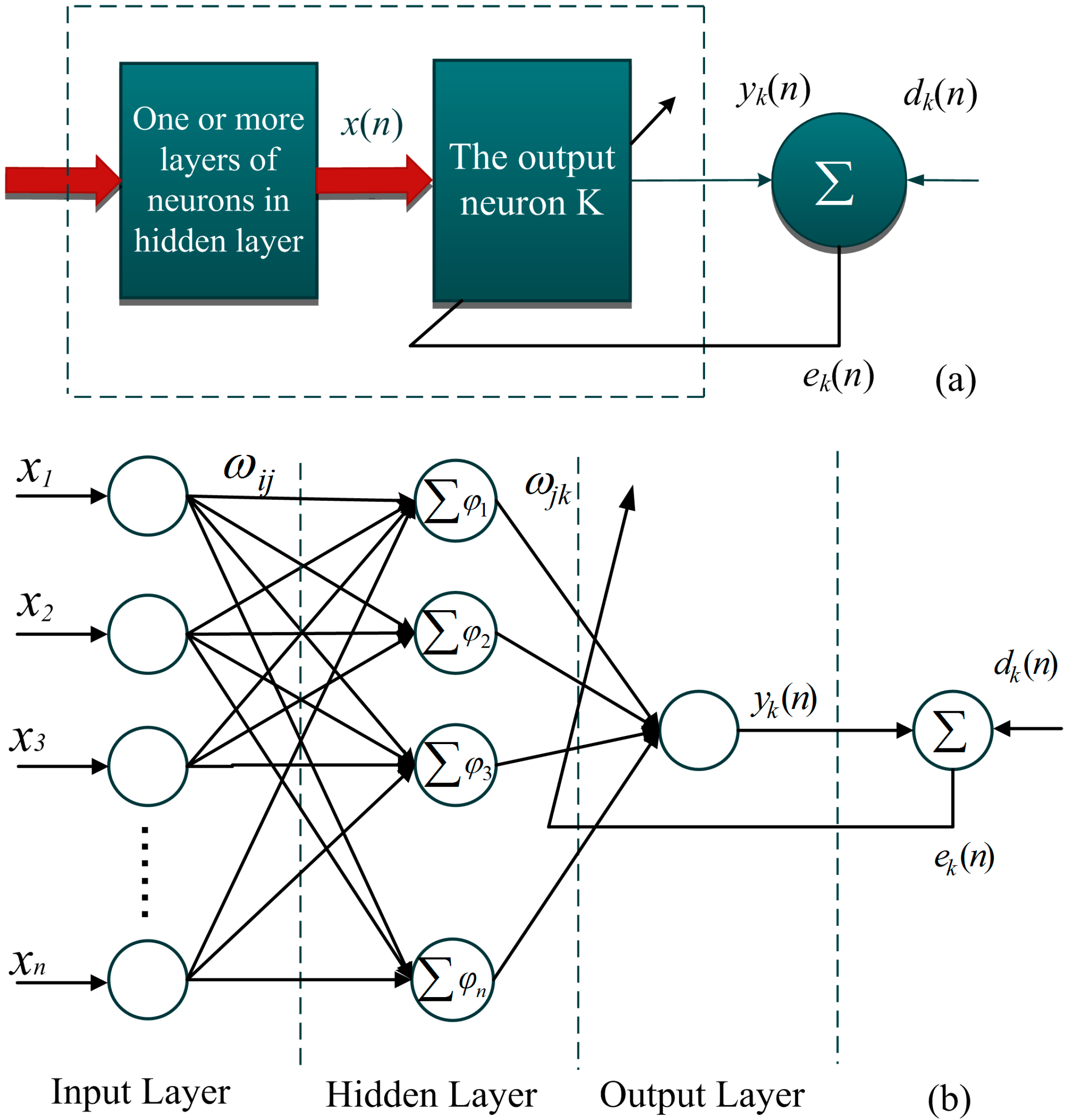
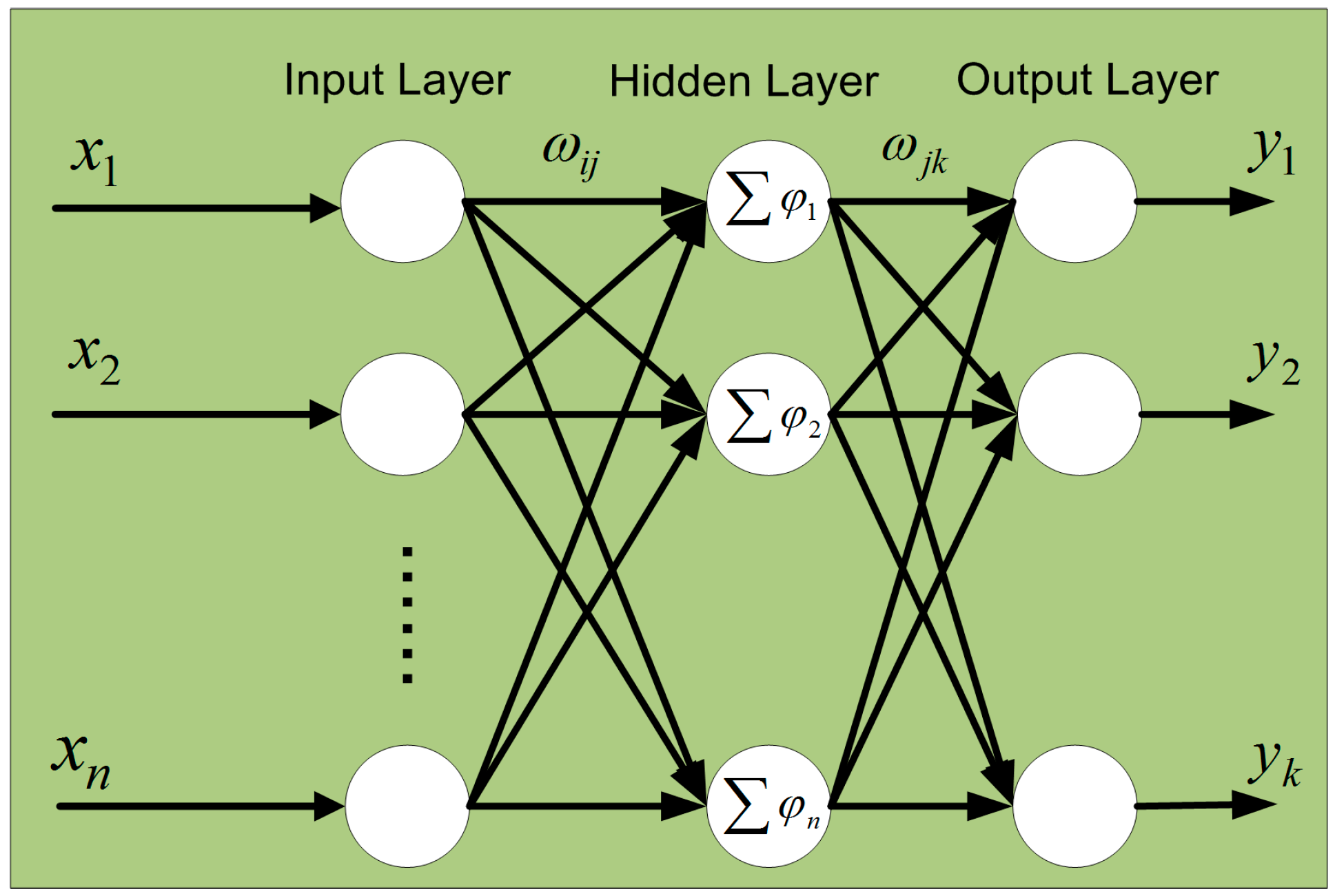
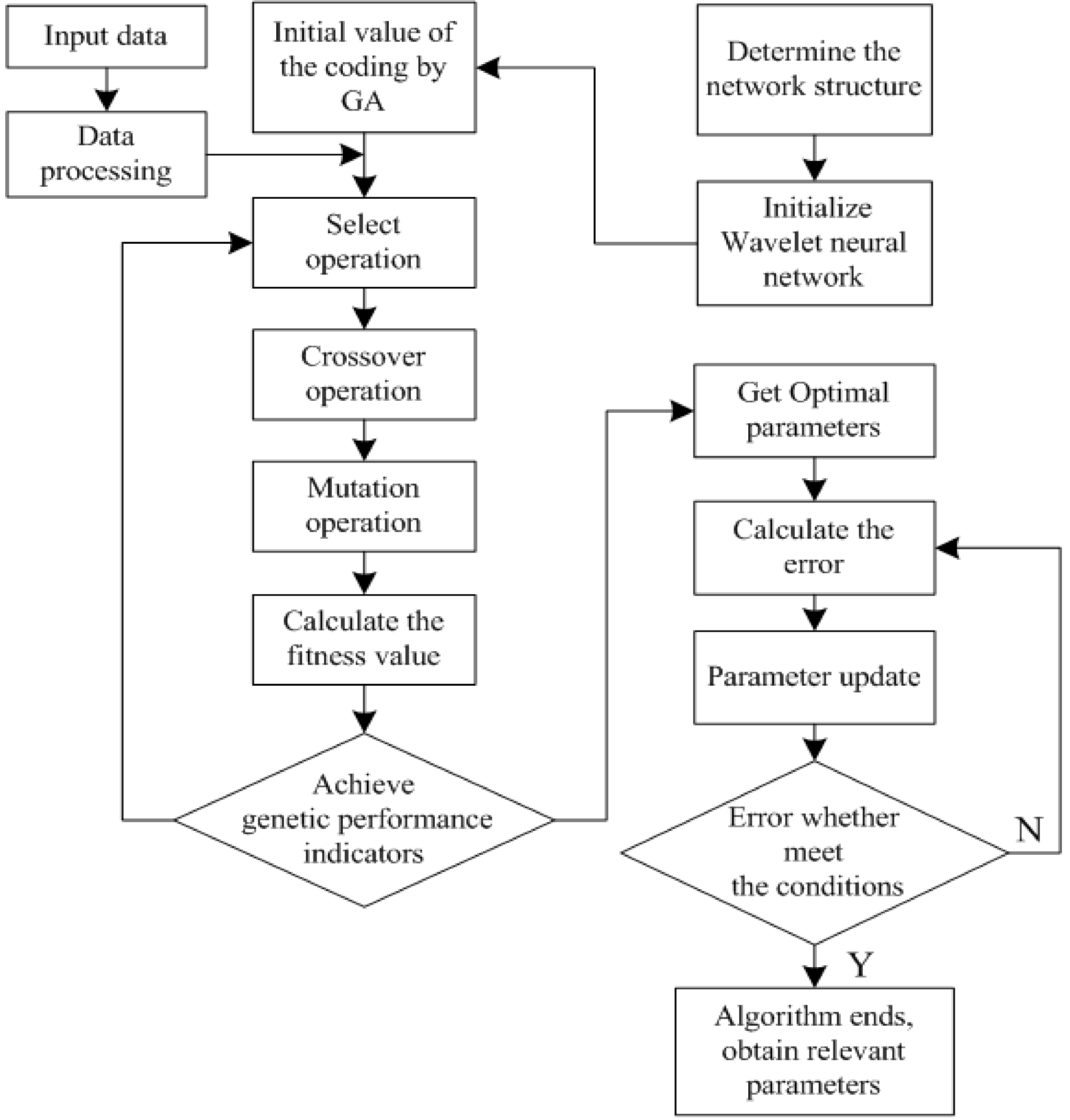
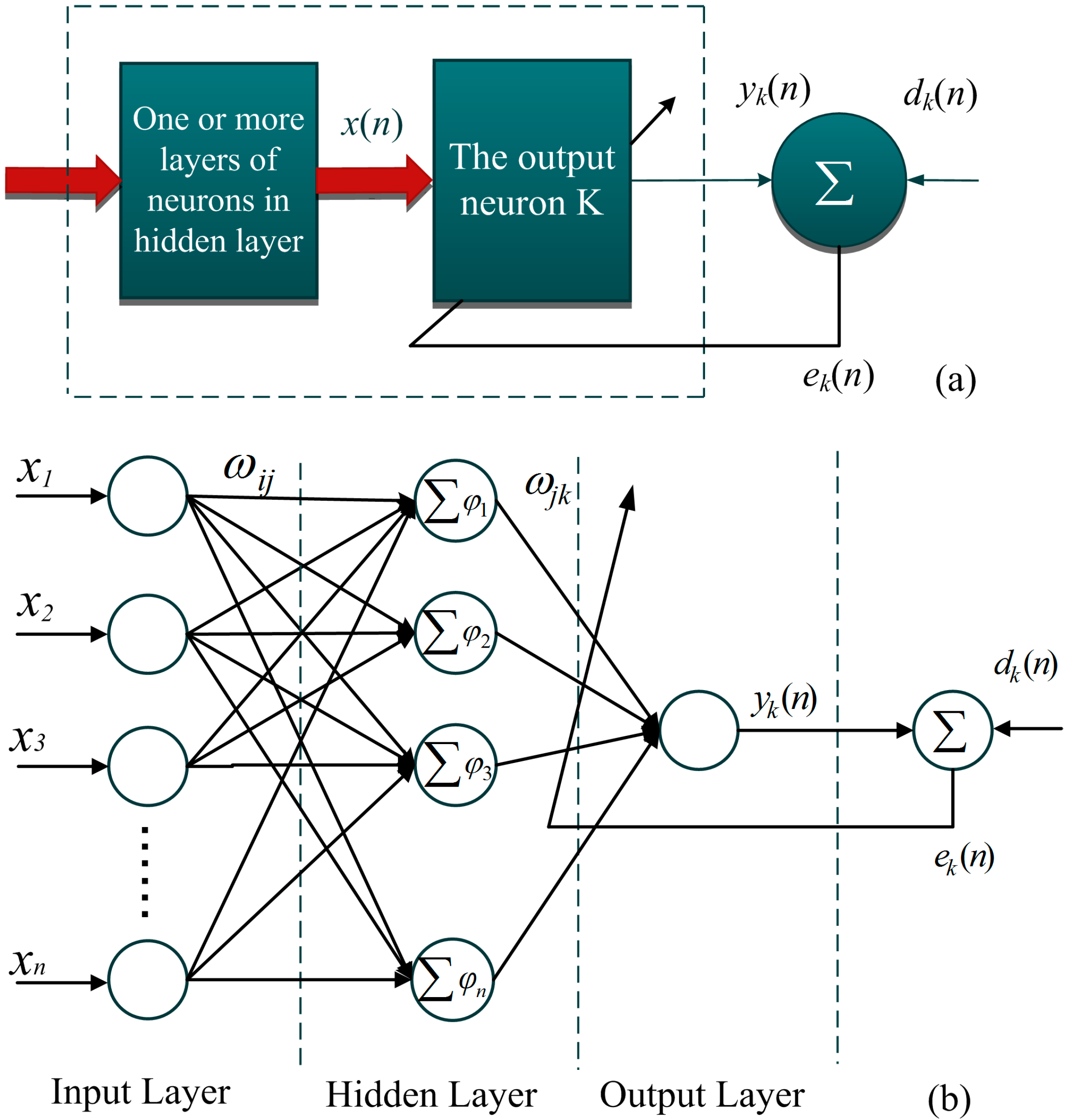
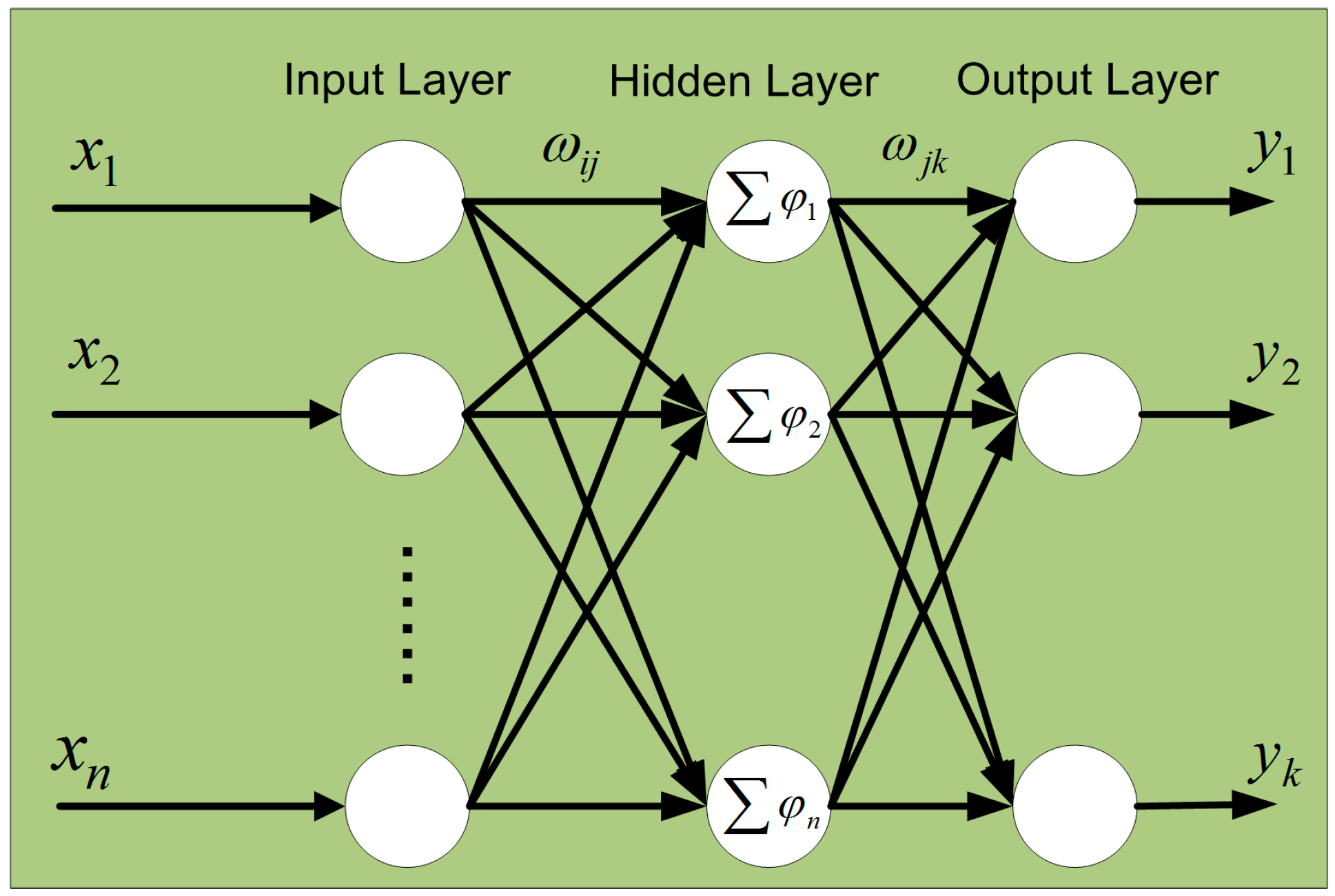
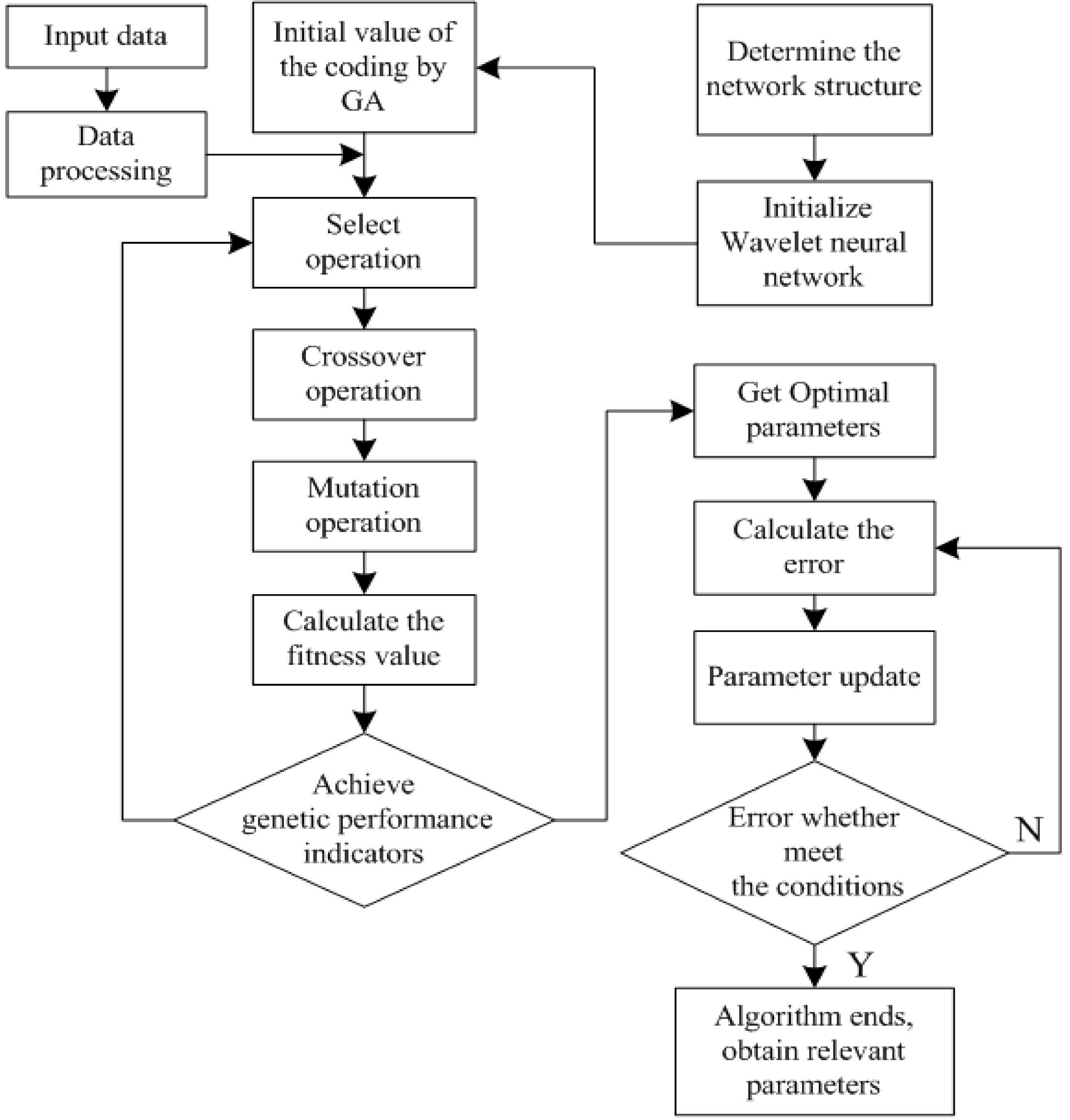
2.2. GA-WNN Compensation Algorithm
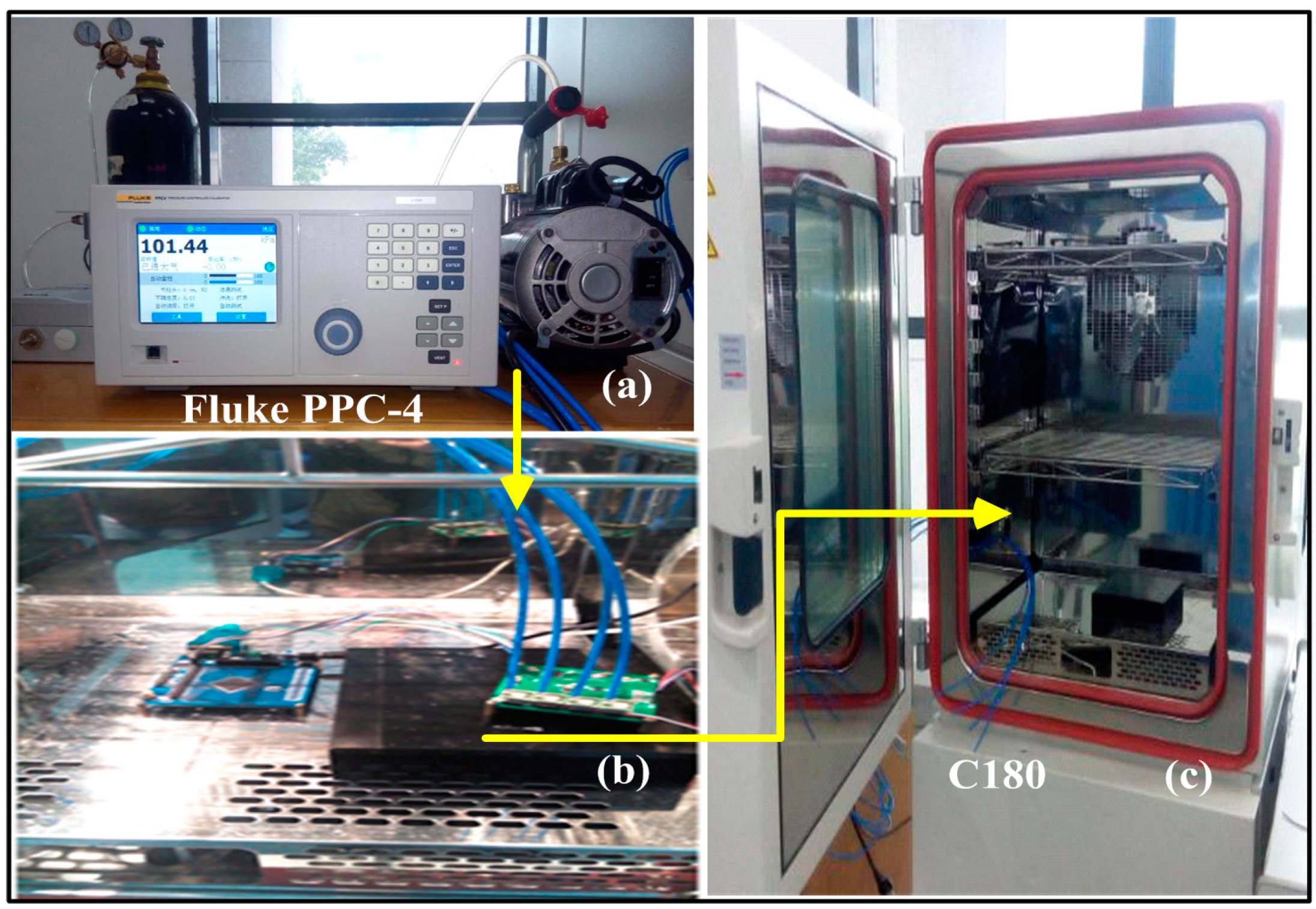
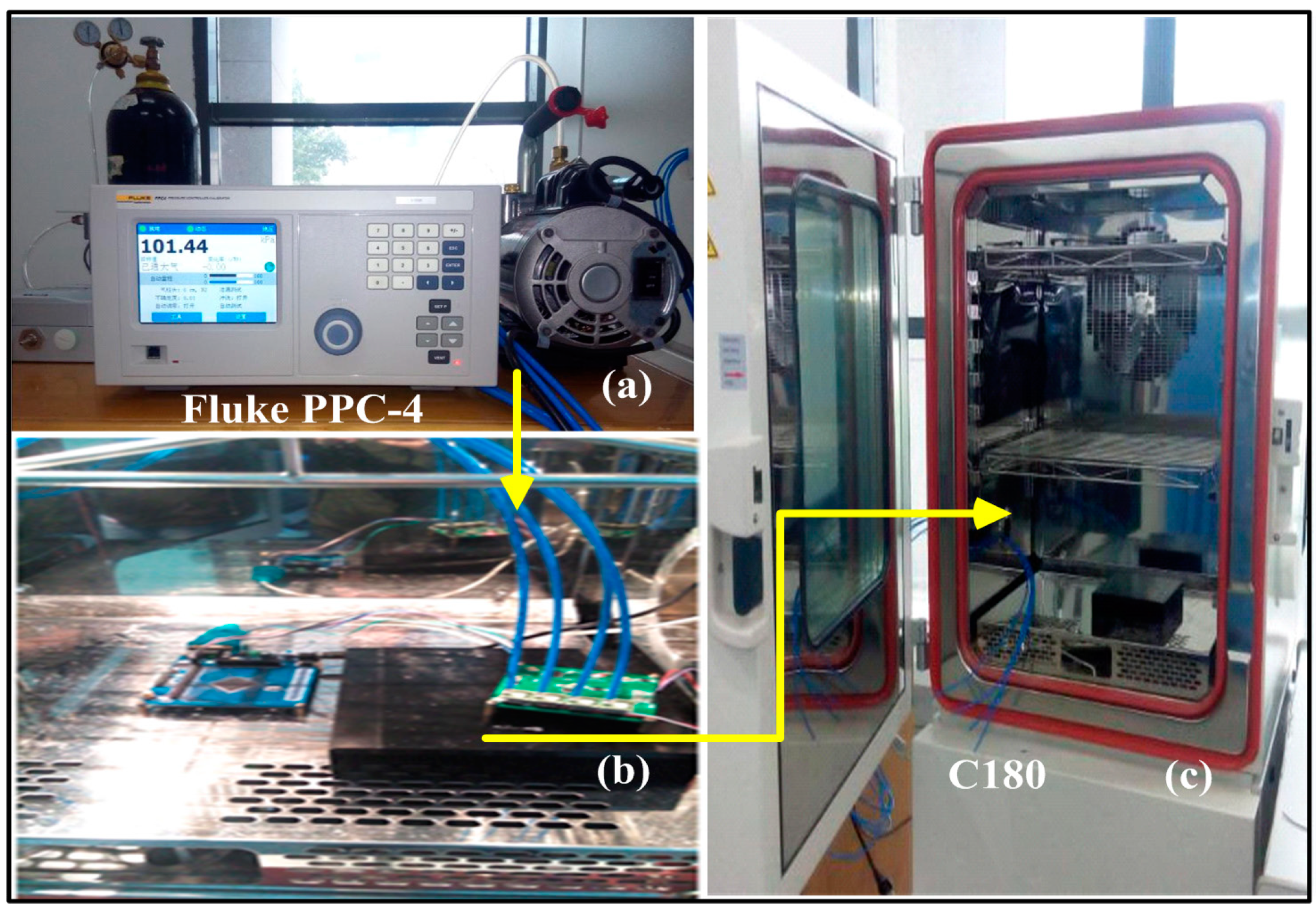
2.3. Calibration Experiment Setup
3. Results and Discussion
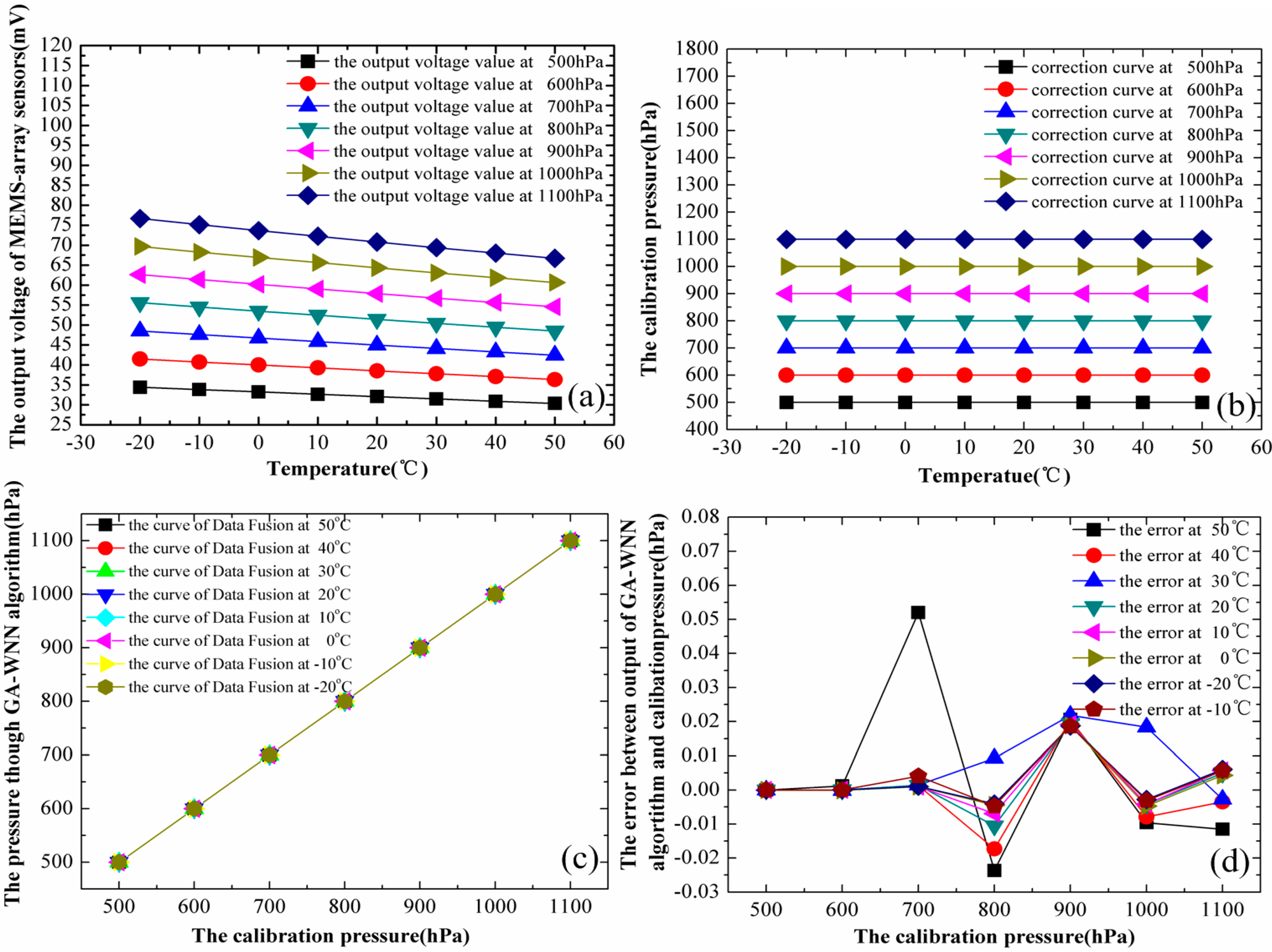
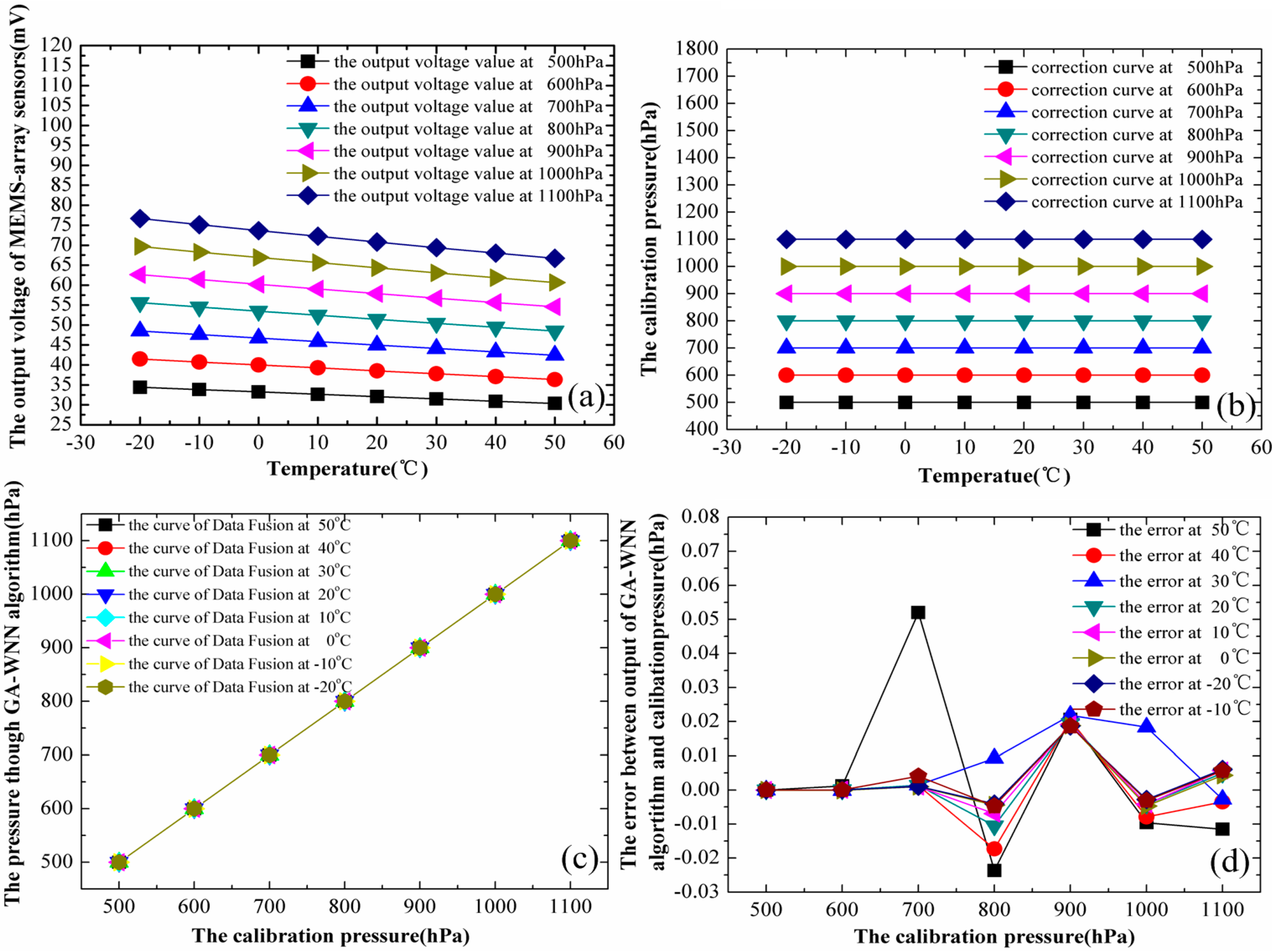
3.1. Temperature Compensation by the GA-WNN Algorithm

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Temperature | P/hPa | 500 | 600 | 700 | 800 | 900 | 1000 | 1100 |
|---|---|---|---|---|---|---|---|---|
| T = 50 °C | Up/mV | 30.26 | 36.35 | 42.44 | 48.52 | 54.59 | 60.67 | 66.74 |
| T = 40 °C | Up/mV | 30.87 | 37.07 | 43.26 | 49.46 | 55.65 | 61.83 | 68.01 |
| T = 30 °C | Up/mV | 31.47 | 37.79 | 44.11 | 50.43 | 56.75 | 63.06 | 69.37 |
| T = 20 °C | Up/mV | 32.10 | 38.57 | 45.04 | 51.50 | 57.97 | 64.42 | 70.78 |
| T = 10 °C | Up/mV | 32.68 | 39.29 | 45.89 | 52.51 | 59.10 | 65.69 | 72.27 |
| T = 0 °C | Up/mV | 33.23 | 39.98 | 46.72 | 53.46 | 60.20 | 66.92 | 73.64 |
| T = −10 °C | Up/mV | 33.84 | 40.74 | 47.64 | 54.53 | 61.42 | 68.29 | 75.15 |
| T = −20 °C | Up/mV | 34.37 | 41.44 | 48.51 | 55.57 | 62.61 | 69.66 | 76.70 |
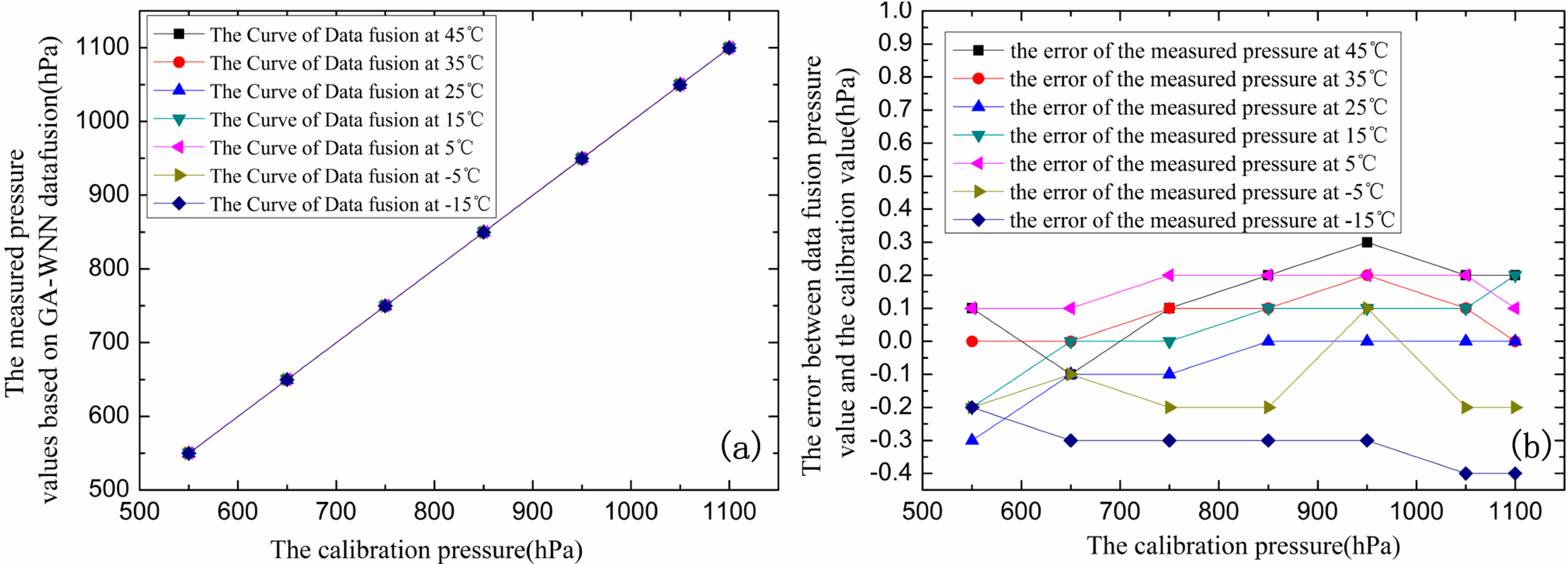
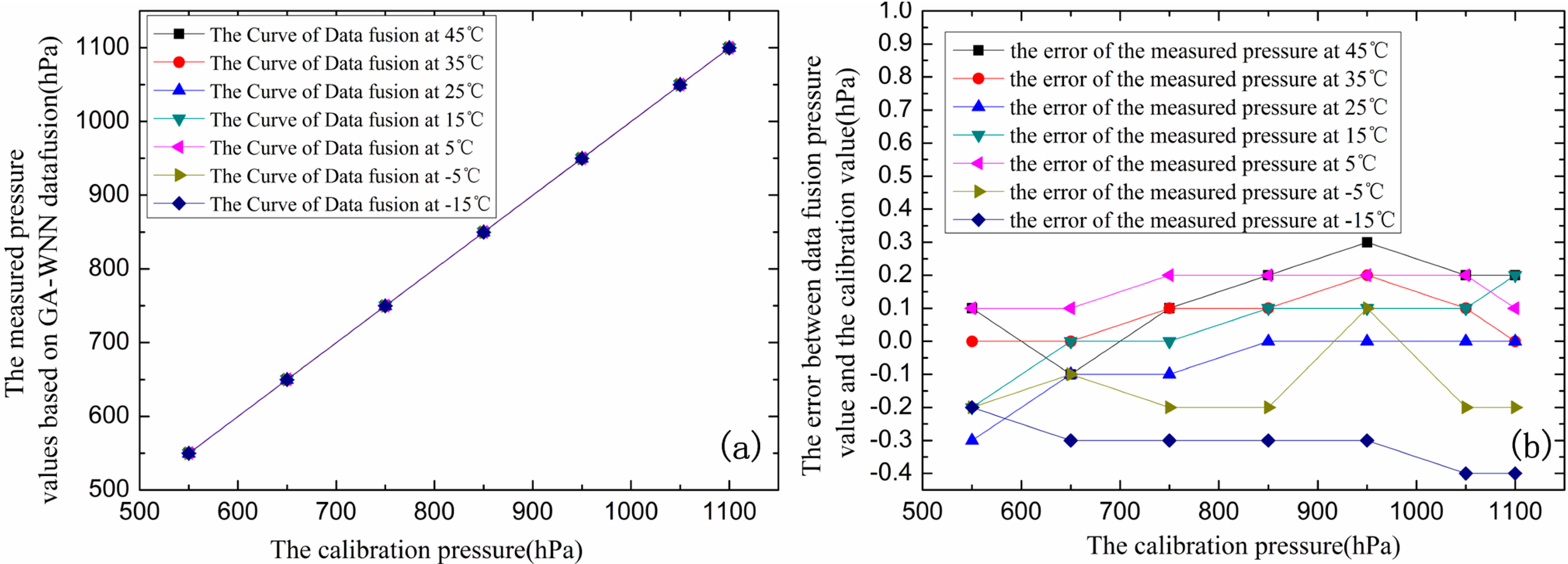
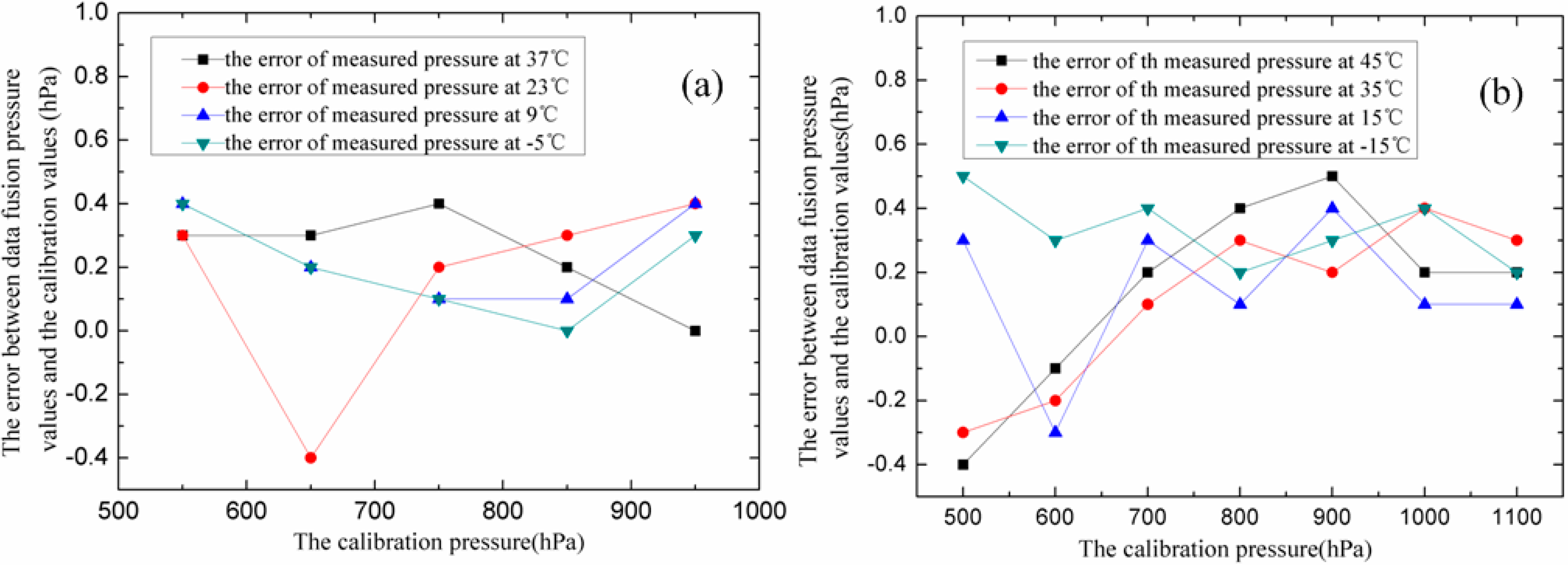
| P/hPa | 550 | 650 | 750 | 850 | 950 | 1050 | 1100 |
|---|---|---|---|---|---|---|---|
| T = 45 °C | 550.1 | 649.9 | 750.1 | 850.2 | 950.3 | 1050.2 | 1100.2 |
| T = 35 °C | 550.0 | 650.0 | 750.1 | 850.1 | 950.2 | 1050.1 | 1100.0 |
| T = 25 °C | 549.7 | 649.9 | 749.9 | 850.0 | 950.0 | 1050.0 | 1100.0 |
| T = 15 °C | 549.8 | 650.0 | 750.0 | 850.1 | 950.1 | 1050.1 | 1100.2 |
| T = 5 °C | 550.1 | 650.1 | 750.2 | 850.2 | 950.2 | 1050.2 | 1100.1 |
| T = −5 °C | 549.8 | 649.9 | 749.8 | 849.8 | 949.9 | 1049.8 | 1099.8 |
| T = −15 °C | 549.8 | 649.7 | 749.7 | 849.7 | 949.7 | 1049.6 | 1099.6 |
3.2. System Evaluation
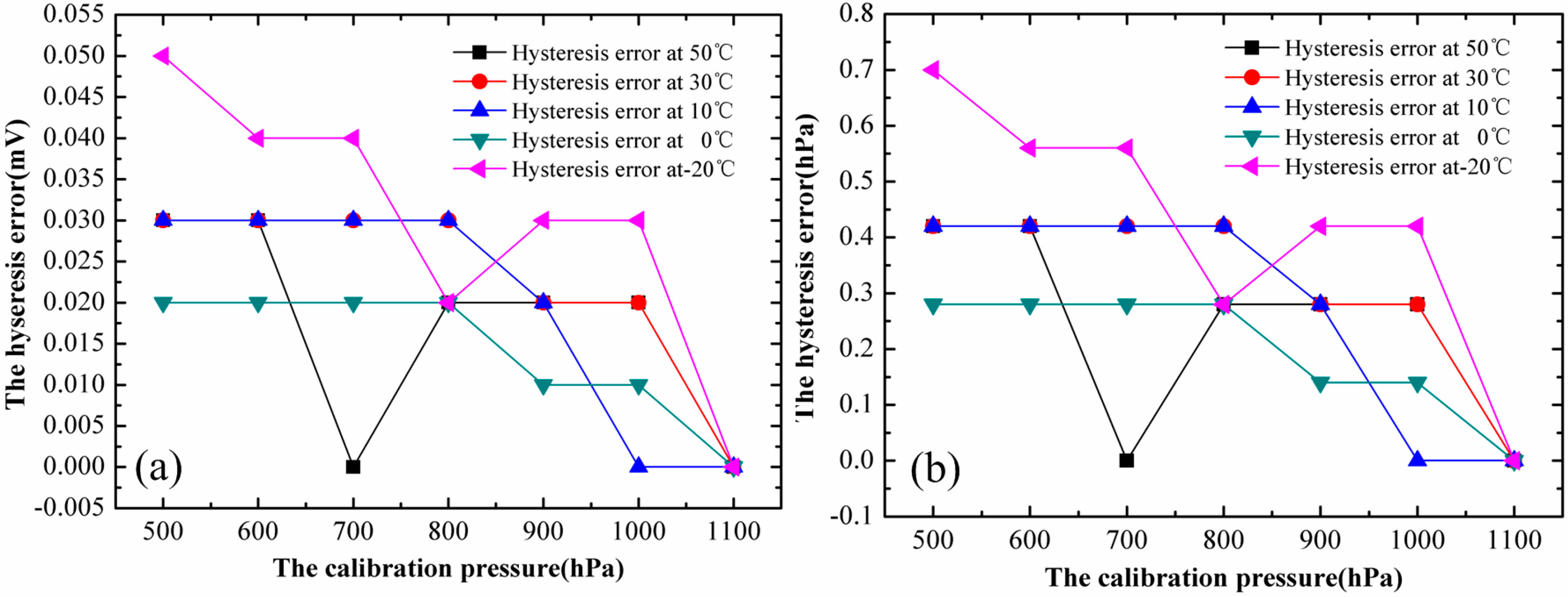
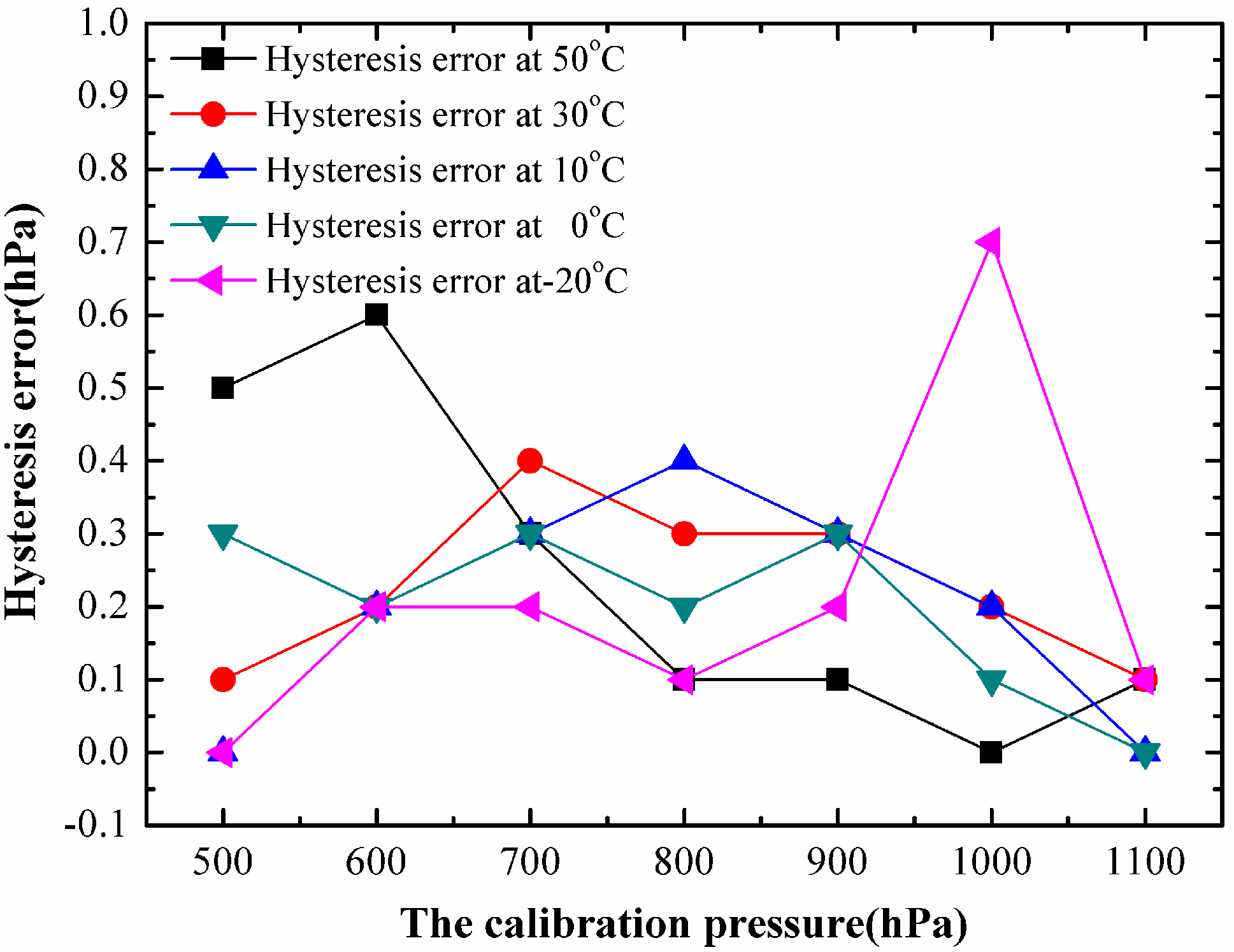
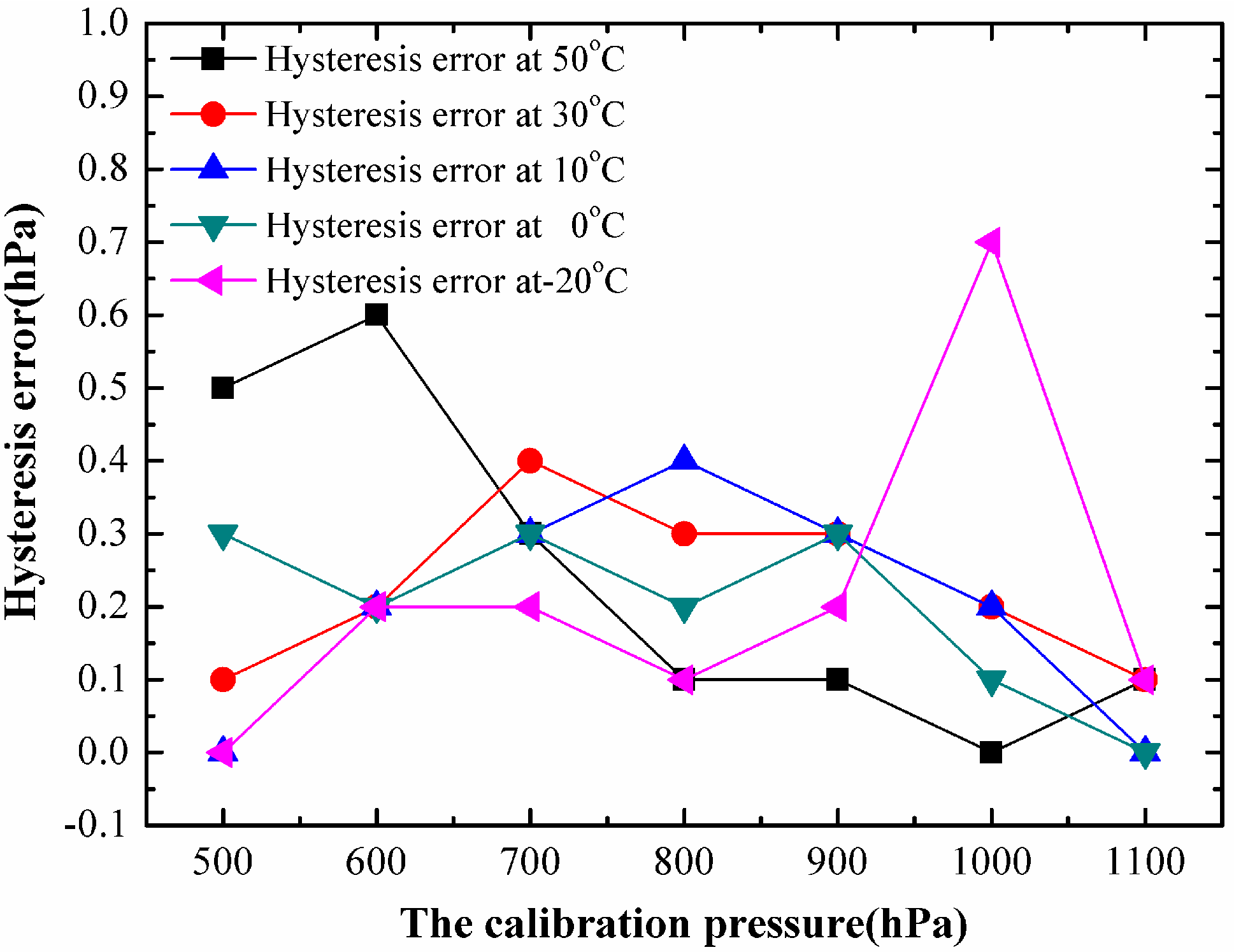
3.3. Hysteresis Effect Compensation
| Temperature | P/hPa | 500 | 600 | 700 | 800 | 900 | 1000 | 1100 |
|---|---|---|---|---|---|---|---|---|
| T = 50 °C | Uinc/mV | 30.26 | 36.35 | 42.44 | 48.52 | 54.59 | 60.67 | 66.74 |
| Udec/mV | 30.29 | 36.38 | 42.44 | 48.54 | 54.61 | 66.69 | 66.74 | |
| T = 30 °C | Uinc/mV | 31.44 | 37.78 | 44.11 | 50.44 | 56.77 | 63.09 | 69.41 |
| Udec/mV | 31.47 | 37.81 | 44.14 | 50.47 | 56.79 | 63.11 | 69.41 | |
| T = 10 °C | Uinc/mV | 32.63 | 39.24 | 45.85 | 52.45 | 59.05 | 65.65 | 72.23 |
| Udec/mV | 32.66 | 39.27 | 45.88 | 52.48 | 59.07 | 65.65 | 72.23 | |
| T = 0 °C | Uinc/mV | 33.20 | 39.95 | 46.70 | 53.44 | 60.18 | 66.90 | 73.62 |
| Udec/mV | 33.22 | 39.97 | 46.72 | 53.46 | 60.19 | 66.91 | 73.63 | |
| T = −20 °C | Uinc/mV | 34.37 | 41.44 | 48.51 | 55.57 | 62.61 | 69.66 | 76.70 |
| Udec/mV | 34.42 | 41.48 | 48.45 | 55.59 | 62.64 | 69.69 | 76.70 |

| Temperature | P/hPa | 500 | 600 | 700 | 800 | 900 | 1000 | 1100 |
|---|---|---|---|---|---|---|---|---|
| T = 50 °C | Pinc/hPa | 499.7 | 599.8 | 700.0 | 800.2 | 900.3 | 1000.3 | 1100.3 |
| Pdec/hPa | 500.2 | 600.4 | 700.3 | 800.3 | 900.4 | 1000.3 | 1100.4 | |
| T = 30 °C | Pinc/hPa | 499.7 | 599.7 | 699.6 | 799.8 | 899.8 | 999.8 | 1099.8 |
| Pdec/hPa | 499.6 | 599.9 | 700.0 | 800.1 | 900.1 | 1000.0 | 1099.9 | |
| T = 10 °C | Pinc/hPa | 499.7 | 599.7 | 699.6 | 799.6 | 899.7 | 999.7 | 1099.7 |
| Pdec/hPa | 499.7 | 599.9 | 699.9 | 800.0 | 900.0 | 999.9 | 1099.7 | |
| T = 0 °C | Pinc/hPa | 499.6 | 599.8 | 699.7 | 799.8 | 899.7 | 999.8 | 1099.8 |
| Pdec/hPa | 499.9 | 600.0 | 700.0 | 800.0 | 900.0 | 999.9 | 1099.8 | |
| T = −20 °C | Pinc/hPa | 499.6 | 599.9 | 699.8 | 799.7 | 899.8 | 1000.3 | 1099.7 |
| Pdec/hPa | 499.6 | 599.7 | 699.6 | 799.6 | 899.6 | 999.6 | 1099.6 |
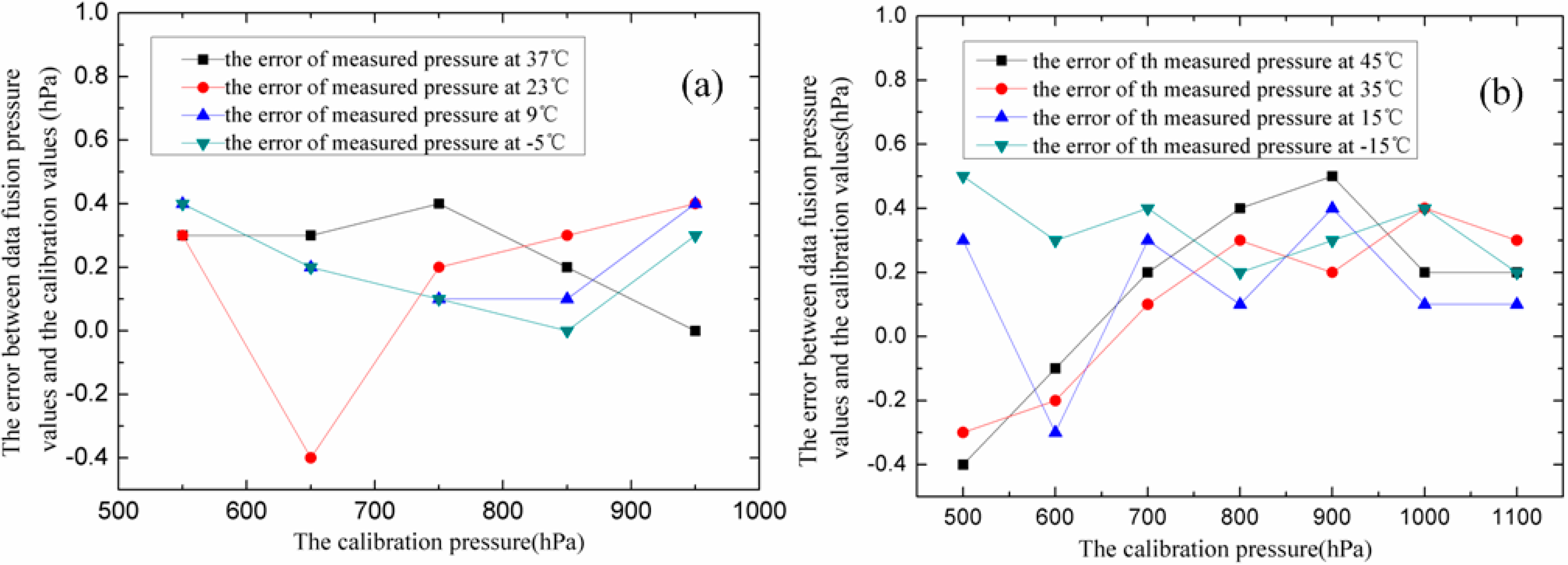
3.4. Long-Term Drift Compensation
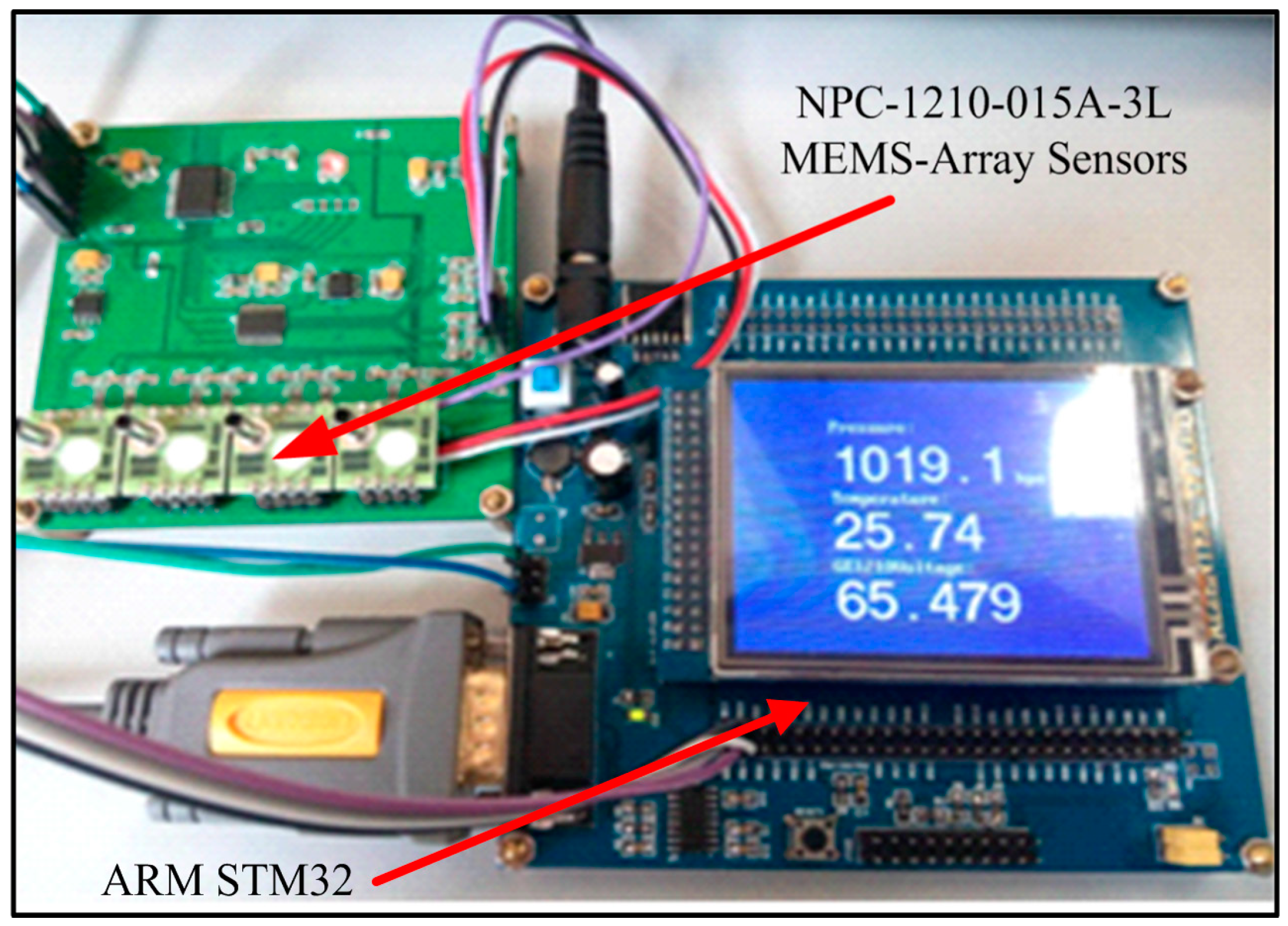
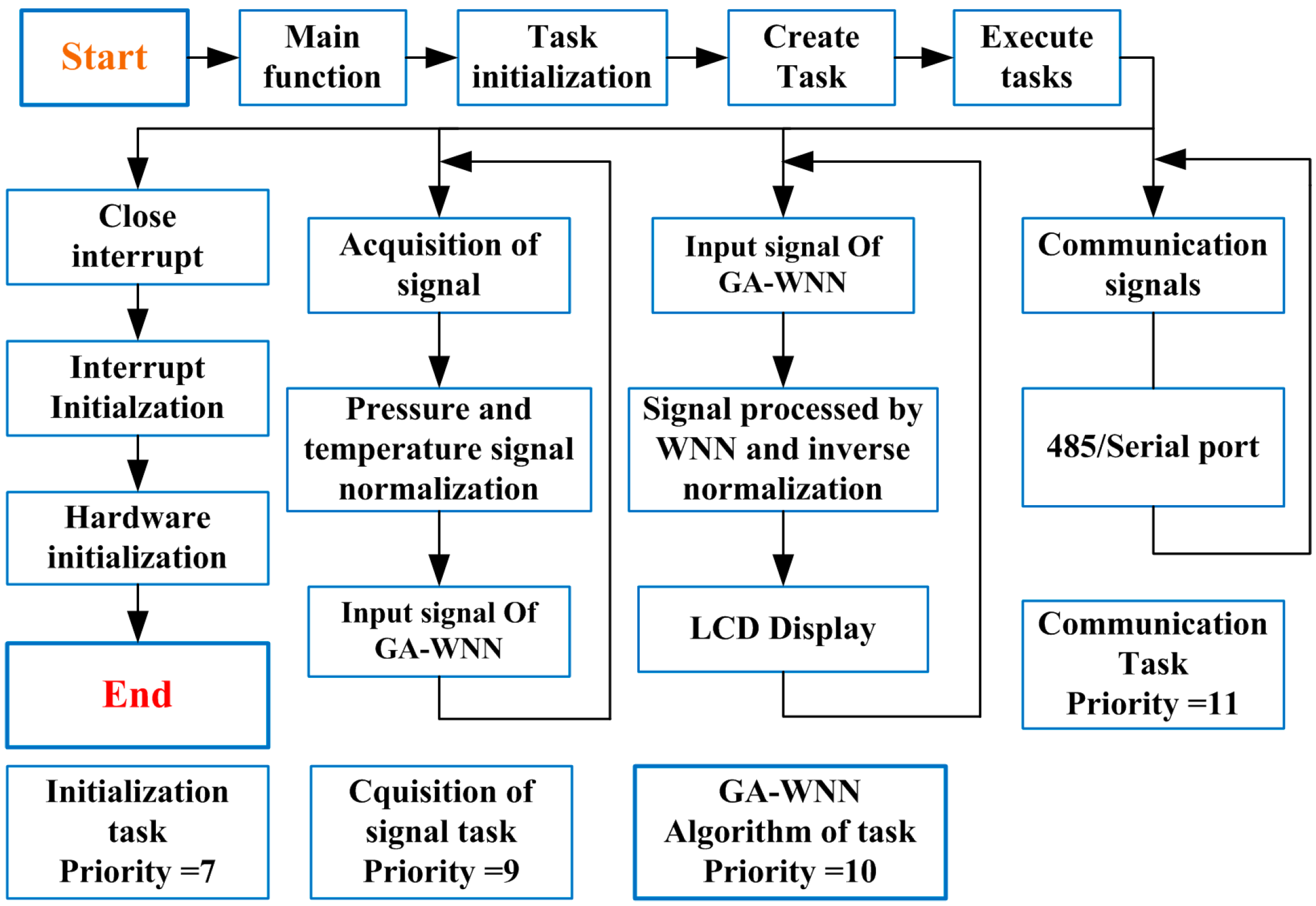
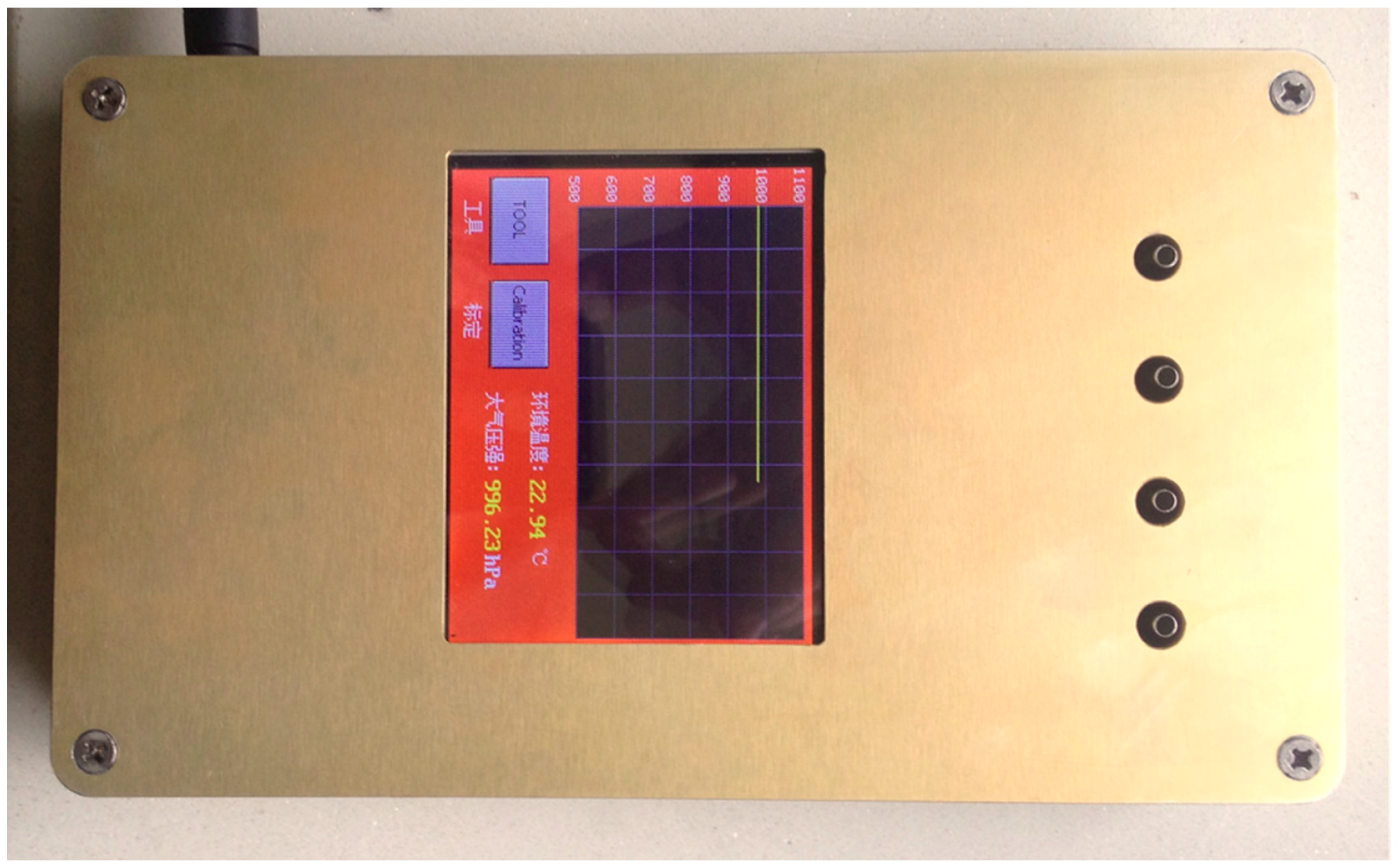
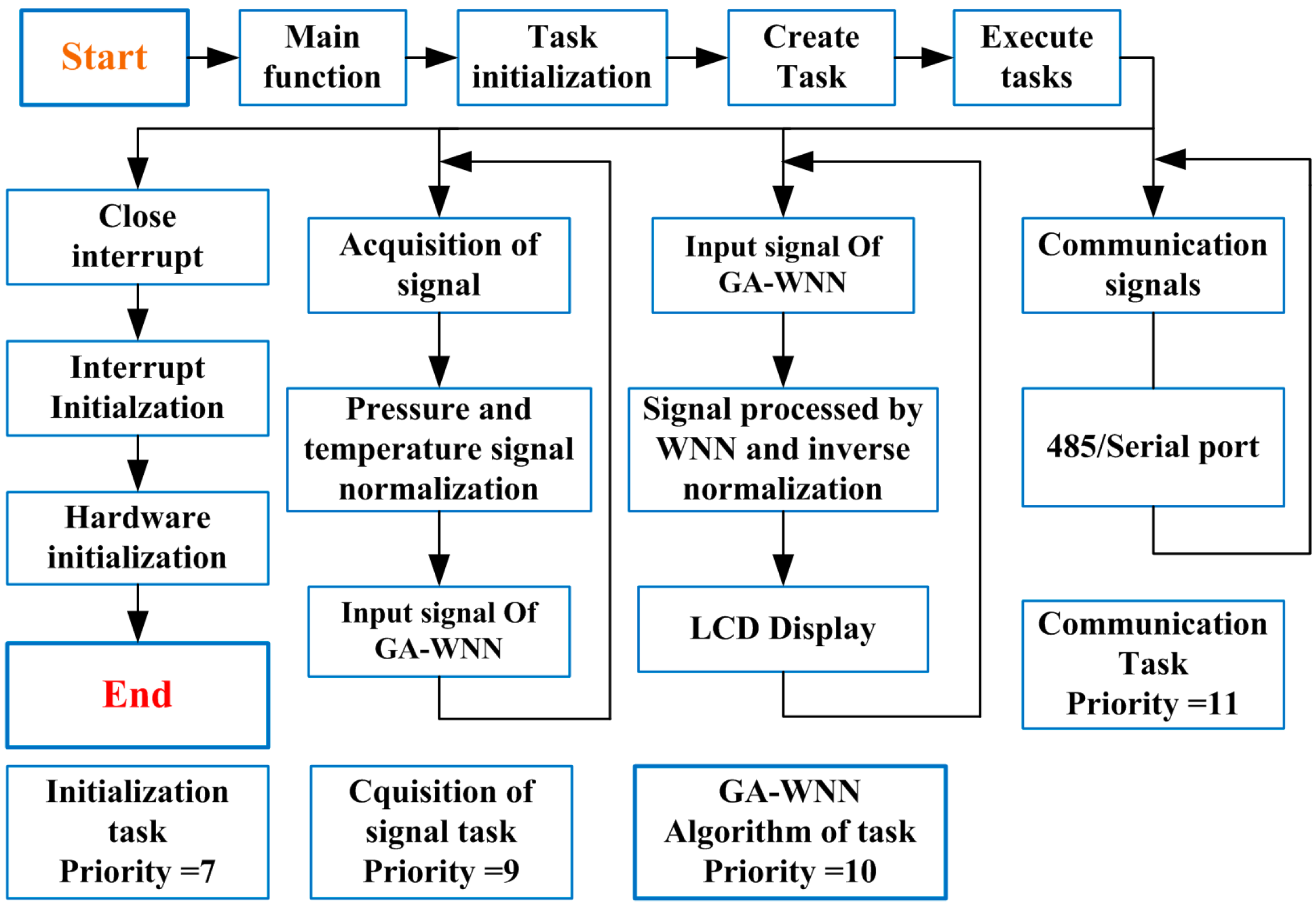
3.5. The Embedded Implementation Process

4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Elliott, W.P.; Ross, R.J. Effects on climate records of changes in national weather service humidity processing procedures. J. Clim. 1998, 11, 2424–2436. [Google Scholar] [CrossRef]
- Wick, G.A.; Neiman, P.J.; Ralph, F.M.; Hamill, T.M. Evaluation of forecasts of the water vapor signature of atmospheric rivers in operational numerical weather prediction models. Weather Forecast. 2013, 28, 1337–1352. [Google Scholar] [CrossRef]
- Hautefeuille, M.; O’Flynn, B.; Peters, F.H.; O’Mahony, C. Development of a Microelectromechanical system (MEMS)-based multisensor platform for environmental monitoring. Micromachines 2011, 2, 410–430. [Google Scholar] [CrossRef]
- Nagesh, C.; Paily, R.P. Fabrication and testing of an osmotic pressure sensor for glucose sensing application. Micromachines 2014, 5, 722–737. [Google Scholar] [CrossRef]
- Dumont-Fillon, D.; Tahriou, H.; Conan, C.; Chappel, E. Insulin micropump with embedded pressure sensors for failure detection and delivery of accurate monitoring. Micromachines 2014, 5, 1161–1172. [Google Scholar] [CrossRef]
- Patra, J.C.; Panda, G.; Baliarsingh, R. Artificial neural network-based nonlinearity estimation of pressure sensors. IEEE Trans. Inst. Meas. 1994, 43, 874–881. [Google Scholar] [CrossRef]
- Khan, S.A.; Shahani, D.T.; Agarwala, A.K. Sensor calibration and compensation using neural network. ISA Trans. 2003, 42, 337–352. [Google Scholar] [CrossRef] [PubMed]
- Islam, T.; Ghosh, S.; Saha, H. ANN-based signal conditioning and its hardware implementation of a nanostrucured porous silicon relative humidity sensor. Sens. Actuators B Chem. 2006, 120, 130–141. [Google Scholar] [CrossRef]
- Pramanik, C.; Islam, T.; Saha, H. Temperature compensation of piezoresistive micro-machined porous silicon pressure sensor by ANN. Microelectron. Reliab. 2006, 46, 343–351. [Google Scholar] [CrossRef]
- Li, X.; Liu, Q.; Pang, S.X.; Xu, K.X.; Tang, H.; Sun, C.S. High-temperature piezoresistive pressure sensor based on implantation of oxygen into silicon wafer. Sens. Actuators A Phys. 2012, 179, 277–282. [Google Scholar] [CrossRef]
- Wang, X.; Ye, M. Hysteresis and nonlinearity compensation of relative humidity sensor using support vector machines. Sens. Actuators B Chem. 2008, 129, 274–284. [Google Scholar] [CrossRef]
- Murugan, S.; Umayal, S.P. A review on enhancing the linearity characteristic of different types of transducers-a comparative study. Int. J. Mod. Eng. Res. 2013, 3, 1186–1191. [Google Scholar]
- Islam, T.; Saha, H. Hysteresis compensation of a porous silicon relative humidity sensor using ANN technique. Sens. Actuators B Chem. 2006, 114, 334–343. [Google Scholar] [CrossRef]
- Gao, M.J.; Hu, L.M. Research on nonlinear emendation of pressure sensor based on the genetic wavelet neural network. Chin. J. Sens. Actuators 2007, 20, 816–819. (In Chinese) [Google Scholar]
- Zhang, J.H.; Fu, Y.; Ge, Y.X.; Gu, F.; Yao, J.H.; Huang, Q.; Li, M. The study on the application of GA-BP neural network in the pneumatic pressure-type relative altimeter. Chin. J. Sens. Actuators 2014, 27, 1002–1008. (In Chinese) [Google Scholar]
- Du, Z.M.; Jin, X.Q.; Yang, Y.Y. Fault diagnosis for temperature, flow rate and pressure sensors in VAV systems using wavelet neural network. Appl. Energy 2009, 86, 1624–1631. [Google Scholar] [CrossRef]
- Zhao, H.; Mi, Y.H. Approaches to realize temperature compensation of pressure sensor based on genetic wavelet neural network. In Proceedings of 6th International Conference on Natural Computation (ICNC 2010), Yantai, China, 10–12 August 2010.
- Shi, Y.; Han, Q.L.; Lian, Q.X. The Method of Neural Network Design and Example Analysis; The Publishing House of Beijing University of Posts and Telecommunications: Beijing, China, 2009; pp. 77–86. (In Chinese) [Google Scholar]
- Kermani, B.G. Using neural network and genetic algorithm to enhance performance in an electronic nose. IEEE Trans. Biomed. Eng. 1999, 46, 429–439. [Google Scholar] [CrossRef] [PubMed]
- Yang, S.L.; Ma, J.J.; Wang, C.H.; Zhang, S.M. Prediction of short-term transportation flow based on optimizing wavelet neural network by genetic algorithm. Adv. Mater. Res. 2013, 694–697, 2715–2720. [Google Scholar] [CrossRef]
- Sahay, R.R.; Srivastava, A. Predicting monsoon floods in rivers embedding wavelet transform, genetic algorithm and neural network. Water Resour. Manag. 2014, 28, 301–317. [Google Scholar] [CrossRef]
- Fraden, J. HandBook of Modern Sensors, Physics: Design and Applications; Springer: Berlin, Germany, 2003; pp. 20–21. [Google Scholar]
- Islam, T.; Saha, H. Study of long-term drift of a porous silicon humidity sensor and its compensation using ANN technique. Sens. Actuators A Phys. 2007, 133, 472–479. [Google Scholar] [CrossRef]
- Wu, Y.M.; Luo, H.J. Improvement of task scheduling and supervision mechanism in µC/OS-II system. Comput. Eng. 2009, 35, 266–268. (In Chinese) [Google Scholar]
- Wang, J.; Ye, R.Y. Optimization of µC/OS-II and its application in smart transmitters. Proc. Autom. Instr. 2010, 31, 5–7. [Google Scholar]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, J.; Wu, Y.; Liu, Q.; Gu, F.; Mao, X.; Li, M. Research on High-Precision, Low Cost Piezoresistive MEMS-Array Pressure Transmitters Based on Genetic Wavelet Neural Networks for Meteorological Measurements. Micromachines 2015, 6, 554-573. https://doi.org/10.3390/mi6050554
Zhang J, Wu Y, Liu Q, Gu F, Mao X, Li M. Research on High-Precision, Low Cost Piezoresistive MEMS-Array Pressure Transmitters Based on Genetic Wavelet Neural Networks for Meteorological Measurements. Micromachines. 2015; 6(5):554-573. https://doi.org/10.3390/mi6050554
Chicago/Turabian StyleZhang, Jiahong, Yusheng Wu, Qingquan Liu, Fang Gu, Xiaoli Mao, and Min Li. 2015. "Research on High-Precision, Low Cost Piezoresistive MEMS-Array Pressure Transmitters Based on Genetic Wavelet Neural Networks for Meteorological Measurements" Micromachines 6, no. 5: 554-573. https://doi.org/10.3390/mi6050554