Integrated Magnetic MEMS Relays: Status of the Technology


Abstract
:
1. Introduction
2. MEMS Switches
2.1. Advantages of MEMS Switches Over Solid State Switches
2.1.1. Low Power Consumption
2.1.2. High Isolation and Low Insertion Loss

| Group | Actuation | OFF-State Isolation | ON-State Insertion Loss |
|---|---|---|---|
| Touati et al. (2008) [21] | Electrostatic | >30 dB @ 10 GHz | <0.45 dB @ 10 GHz |
| Kaynak et al. (2010) [22] | Electrostatic | >15 dB @ 90–140 GHz | <0.5 dB @ 140 GHz |
| Goggin et al. (2011) [23] | Electrostatic | >25 dB @ 6 GHz | <0.4 dB @ 6 GHz |
| Maciel et al. (2012) [24] | Electrostatic | >10 dB @ 40 GHz | <0.2 dB @ 10 GHz |
| Patel et al. (2012) [25] | Electrostatic | >14 dB @ 40 GHz | <1 dB @ 40 GHz |
| Wang et al. (2013) [26] | Electrostatic | >48.3 dB @ 6 GHz | <0.38 dB @ 6 GHz |
| Cohn et al. (2013) [27] | Electrostatic (on 2 substrates) | >35 dB @ 20 GHz | <0.5 dB @ 20 GHz |
| Hwang et al. (2014) [28] | Electrostatic | >29 dB @ 5–30 GHz | 0.12–0.33 dB @ 5–30 GHz |
| Koul et al. (2014) [29] | Electrostatic | >32 dB (simulated) @ 13–17.25 GHz | <1.1 dB @ 13–17.25 GHz |
| Angira et al. (2014) [30] | Electrostatic | >20 dB @ 10–25 GHz | <0.11 dB @ 25 GHz |
| Pal et al. (2014) [14] | Electrothermal | >40 dB @ 10 GHz | <0.42 dB @ 10 GHz |
2.1.3. Linearity and Intermodulation Products
2.2. Drawbacks of MEMS Switches
2.2.1. Low Speed
2.2.2. High Voltages or Currents
2.2.3. Reliability
2.2.4. Packaging and Cost
2.2.5. Fields of Desirable Application
2.3. Examples of Generic MEMS Switches with Various Actuation Schemes Reported in the Literature
| Group | Yao et al. (1999) [77] | Ruan et al. (2001) [78] |
|---|---|---|
| Image |  Reprinted with permission from [77]. Copyright 1999 IEEE. |  Reprinted with permission from [78]. Copyright 2001 Elsevier. |
| Features | Single Pole, Single Throw Capacitive switch Electrostatic actuation 30 V actuation voltage | Single Pole, Single Throw Ohmic switch Electromagnetic actuation 5 V actuation voltage |
| Group | Tan et al. (2003) [79] | Wang et al. (2004) [80] |
| Image |  Reprinted with permission from [79]. Copyright 2003 IEEE. |  Reprinted with permission from [80]. Copyright 2004 IEEE. |
| Features | Single Pole, 4 Throw Ohmic switch Electrostatic actuation 50 V actuation voltage | Single Pole, Single Throw Ohmic switch Electrothermal actuation 2.5–3.5 V actuation voltage |
| Group | Liu et al. (2004) [81] | Lee et al. (2004) [82] |
| Image |  Reprinted with permission from [81]. Copyright 2004 IET |  Reprinted with permission from [82]. Copyright 2004 IEEE. |
| Features | Single Pole, 4 Throw Ohmic switch Electrostatic actuation 30 V actuation voltage | Single Pole, Single ThrowOhmic (a)/capacitive (b) switch Piezoelectric actuation 3.5 V actuation voltage |
| Group | Cho et al. (2005) [83] | Lee et al. (2005) [84] |
| Image |  Reprinted with permission from [83]. Copyright 2005 IEEE. |  Reprinted with permission from [84]. Copyright 2005 IEEE. |
| Features | Single Pole, Single Throw Ohmic/capacitive switch Electromagnetic actuation 4.3 V actuation voltage | Single Pole, 6 Throw Ohmic switch Electrostatic actuation 27.5 V actuation voltage |
| Group | Chu et al. (2007) [85] | Kang et al. (2009) [86] |
| Image |  Reprinted with permission from [85]. Copyright 2007 IOP Publishing. |  Reprinted with permission from [86]. Copyright 2009 IOP Publishing. |
| Features | Single Pole, Double Throw Ohmic switch Electrostatic actuation 10.2 V actuation voltage | Single Pole, 4 Throw Ohmic switch Electrostatic actuation15 V actuation voltage |
3. Magnetic MEMS Relays
3.1. Advantages of Magnetic Actuation

 is present can be written as:
is present can be written as:
 is.
is.
 is present can be written as:
is present can be written as:
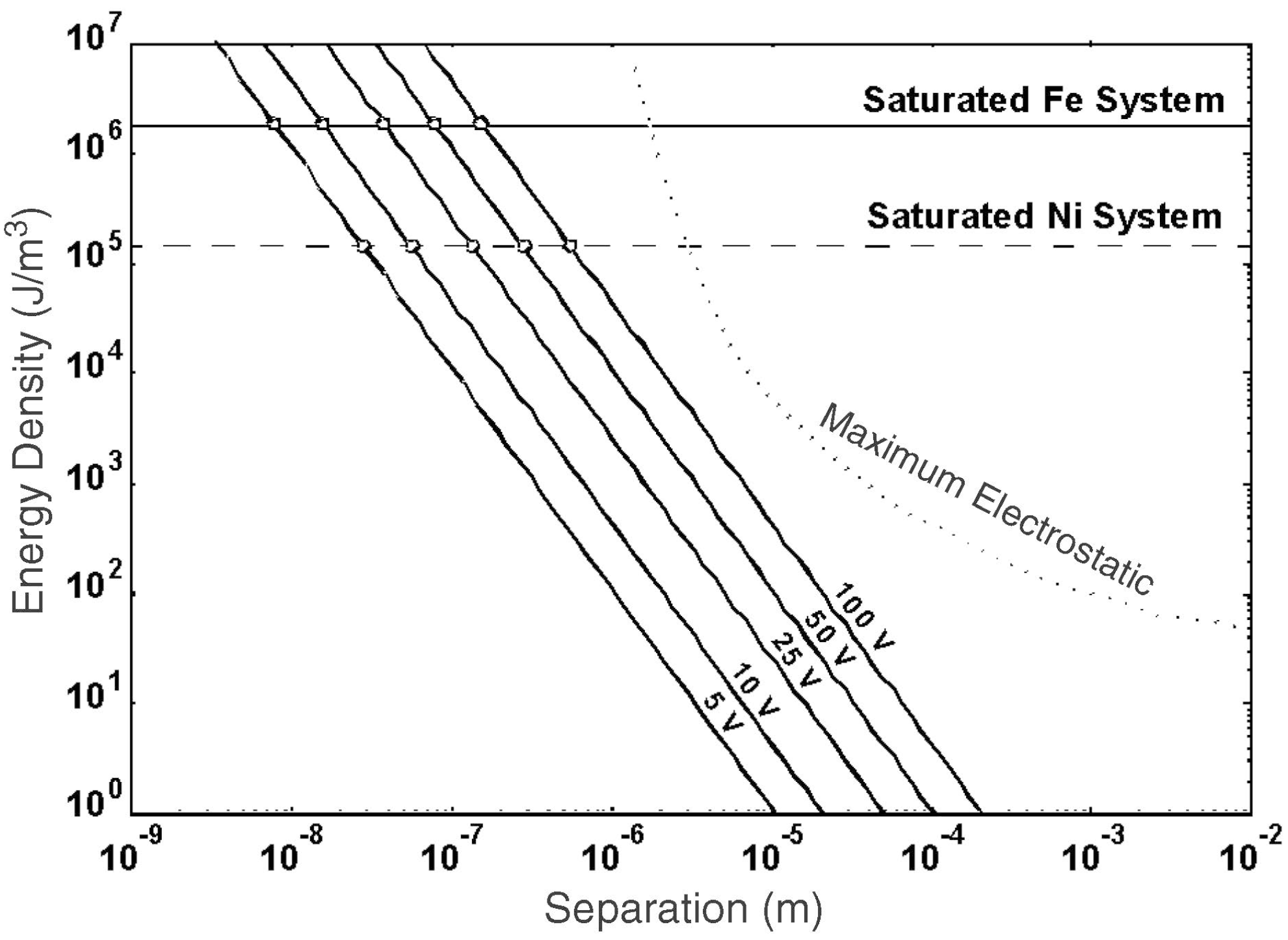
 . The value of the magnetostatic energy density Umagnetostatic is limited by the saturation flux density, Bsat, of a magnetic material or by the maximum magnetic flux density generated by an electromagnet. For a system with a mid-range flux density in the order of 0.1 T, the associated magnetostatic energy density is around 4000 J·m−3, using the vacuum permeability value µ0 = 4π × 10−7 V·s·A−1·m−1. It is clear from the ratio of these two values (Umagnetostatic / Uelectrostatic ≈ 102) that magnetostatic architectures have a higher energy capability per unit volume. This result is obtained on quantities that represent energy densities, and are thus to a certain extent independent of the dimensions of the fabricated structures. Figure 4 shows a comparison of the energy densities for electrostatic actuators at different voltages and actuators based on magnetic materials such as iron or nickel as a function of the gap distance [95]. The plot shows that there are indeed crossover points where electrostatic systems have greater energy capacity, but this only occurs for very small distances or very high voltages. Unfortunately, both these conditions do not fall into viable ranges for application in integrated MEMS devices.
. The value of the magnetostatic energy density Umagnetostatic is limited by the saturation flux density, Bsat, of a magnetic material or by the maximum magnetic flux density generated by an electromagnet. For a system with a mid-range flux density in the order of 0.1 T, the associated magnetostatic energy density is around 4000 J·m−3, using the vacuum permeability value µ0 = 4π × 10−7 V·s·A−1·m−1. It is clear from the ratio of these two values (Umagnetostatic / Uelectrostatic ≈ 102) that magnetostatic architectures have a higher energy capability per unit volume. This result is obtained on quantities that represent energy densities, and are thus to a certain extent independent of the dimensions of the fabricated structures. Figure 4 shows a comparison of the energy densities for electrostatic actuators at different voltages and actuators based on magnetic materials such as iron or nickel as a function of the gap distance [95]. The plot shows that there are indeed crossover points where electrostatic systems have greater energy capacity, but this only occurs for very small distances or very high voltages. Unfortunately, both these conditions do not fall into viable ranges for application in integrated MEMS devices.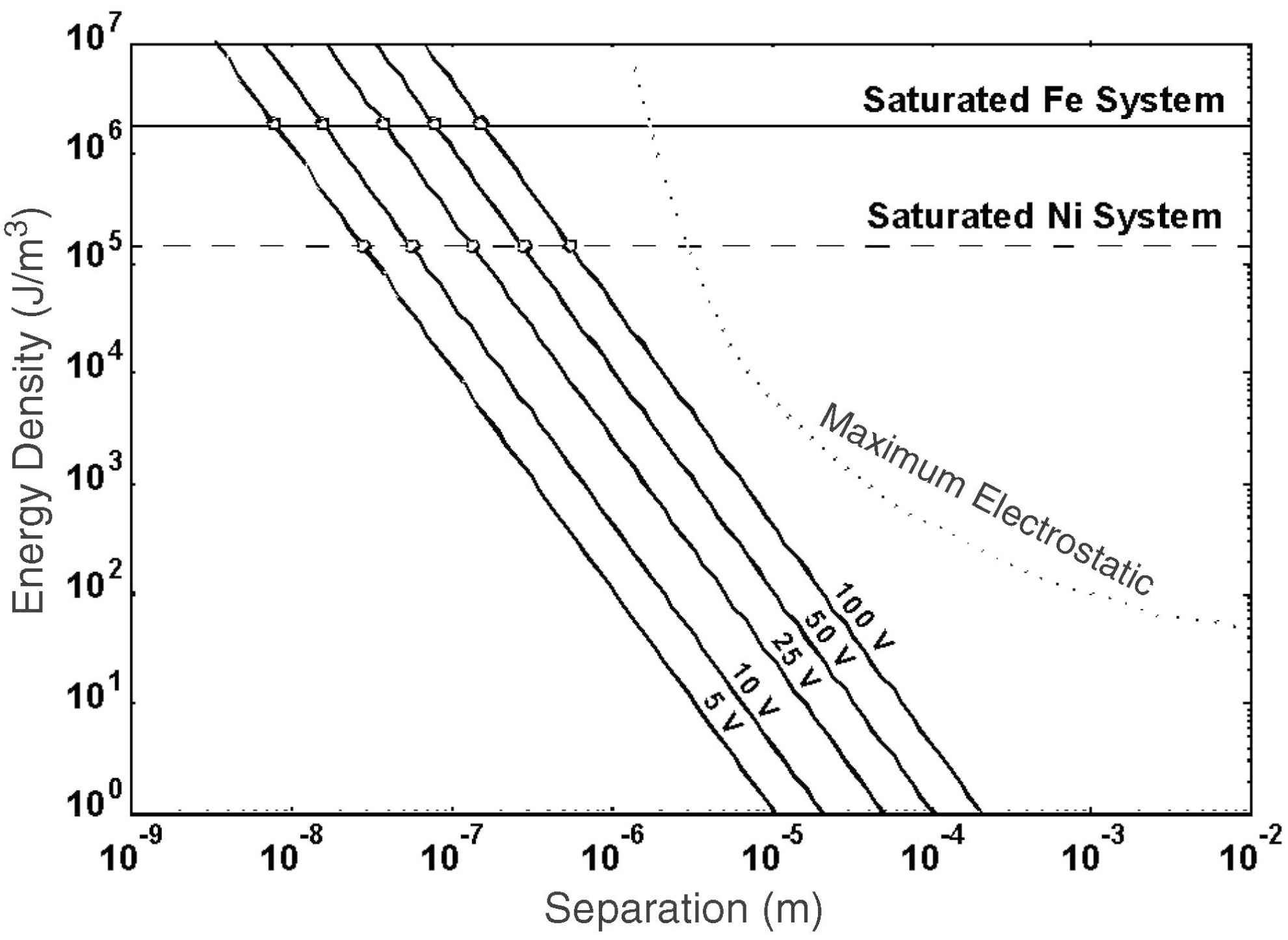
3.2. Excitation Sources
4. Examples of Magnetic MEMS Switches Reported in the Literature
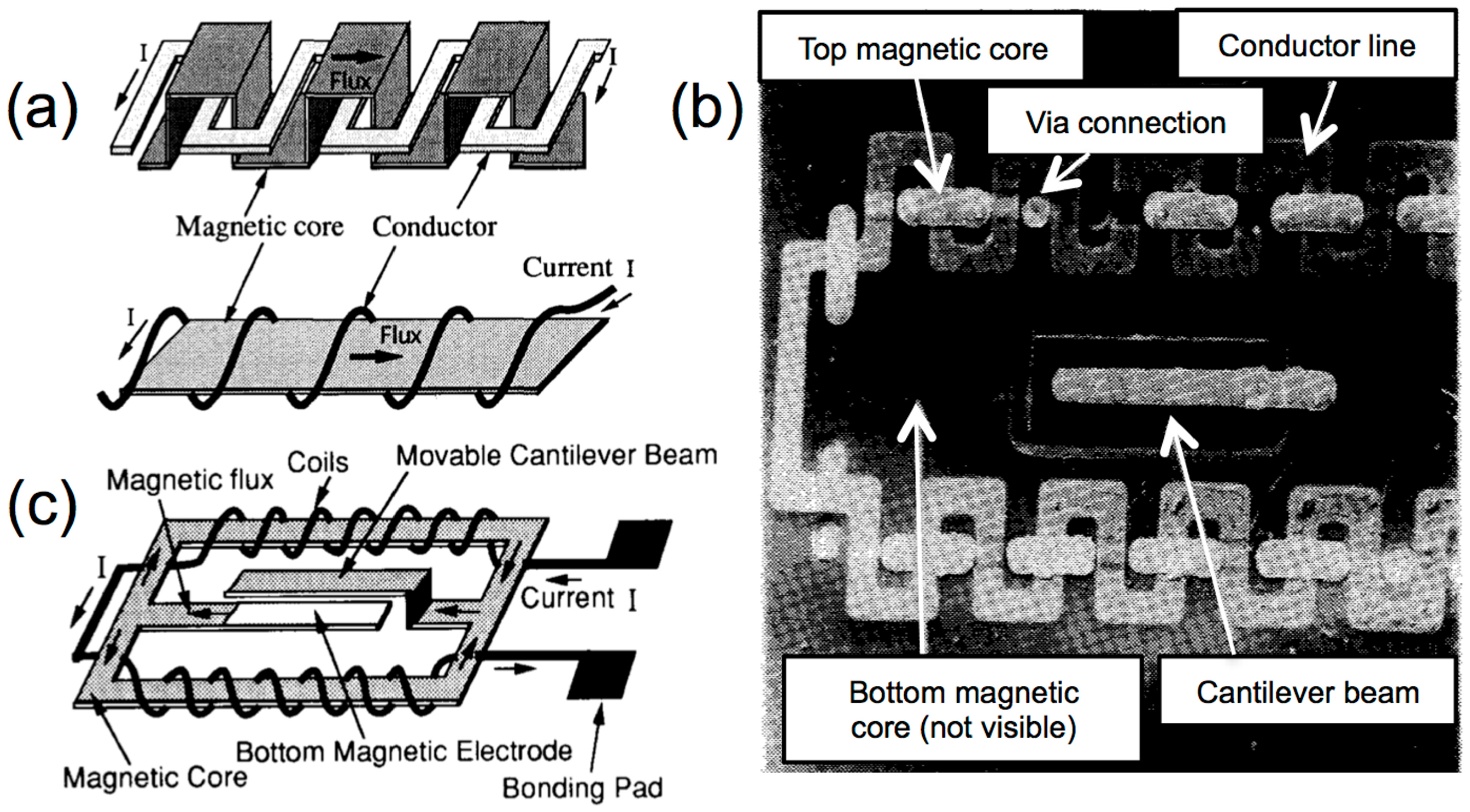
4.1. Taylor et al. (1998) [132]
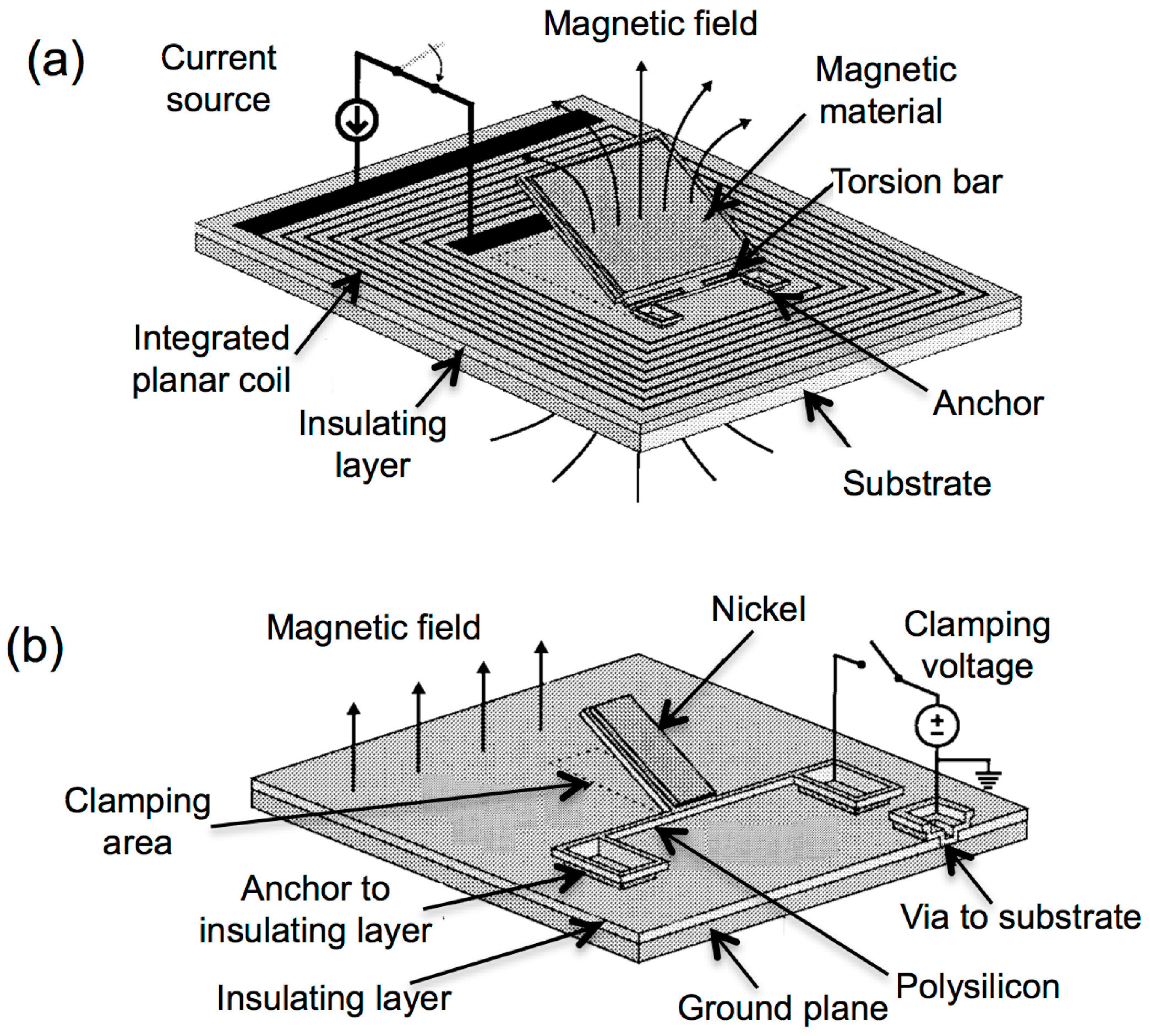
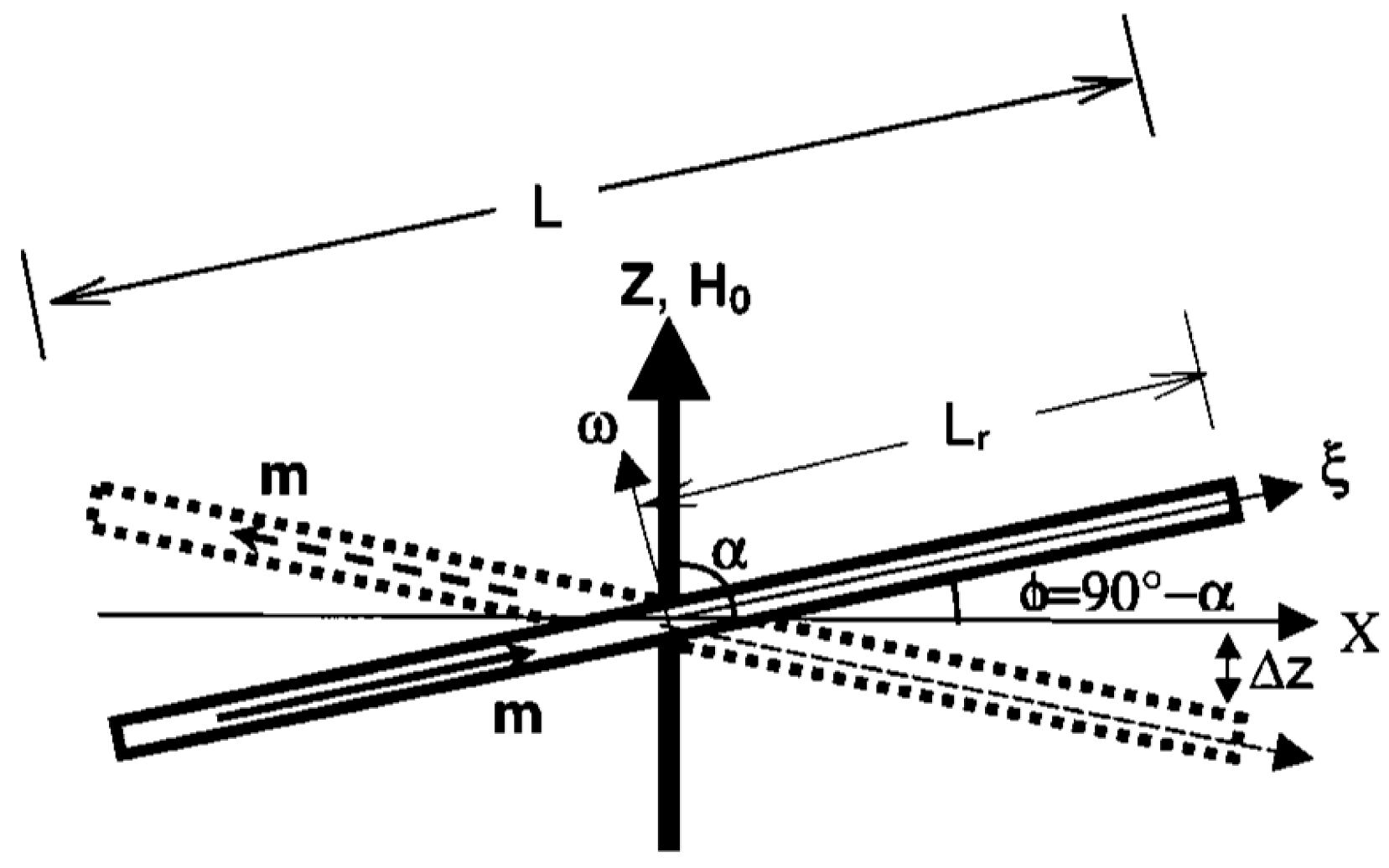
4.2. Ruan et al. (2001) [78,134]
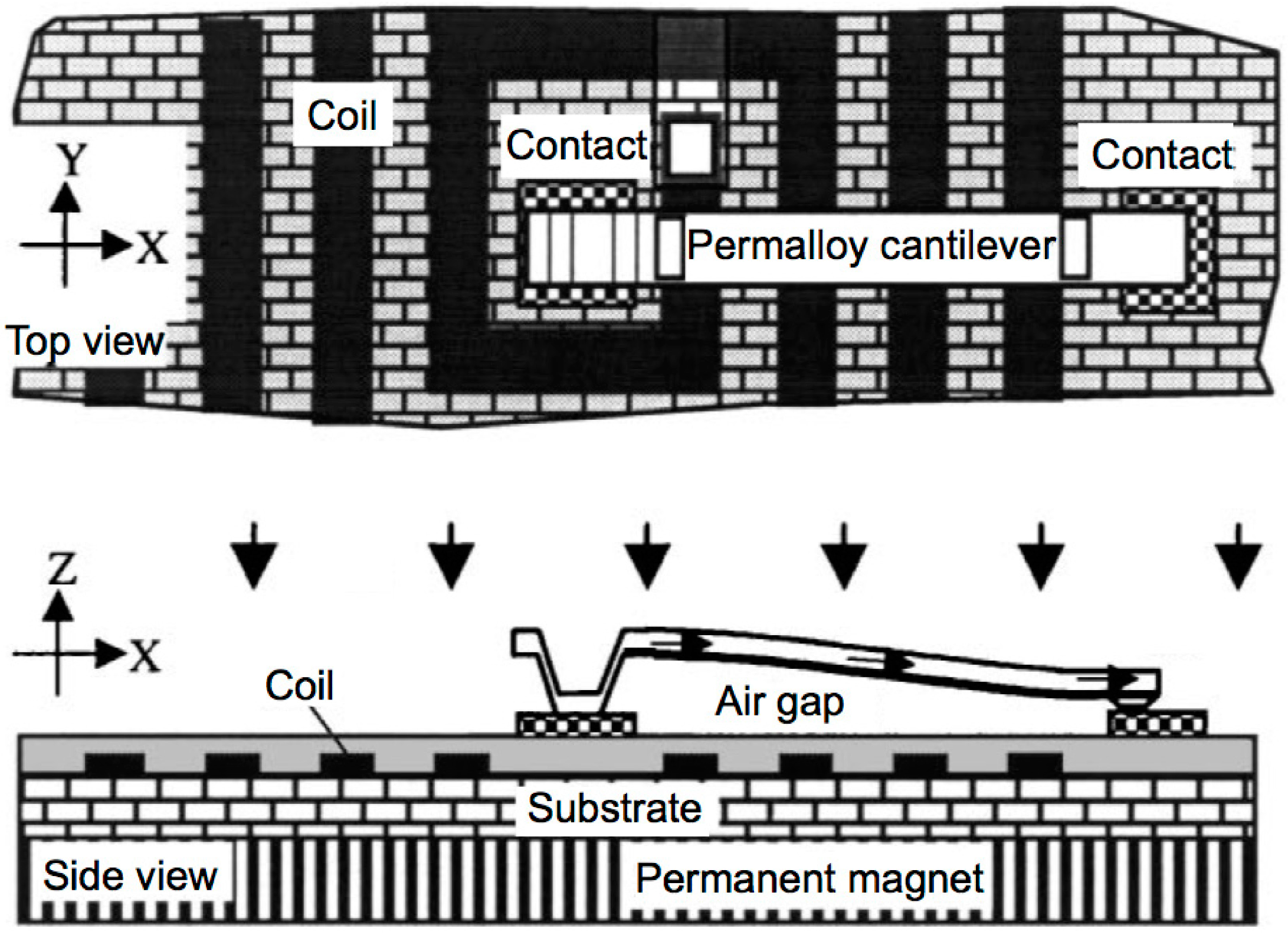
 is the cantilever magnetisation and
is the cantilever magnetisation and  is the bias magnetic field. Reprinted with permission from [134]. Copyright 2001 IEEE.
is the bias magnetic field. Reprinted with permission from [134]. Copyright 2001 IEEE.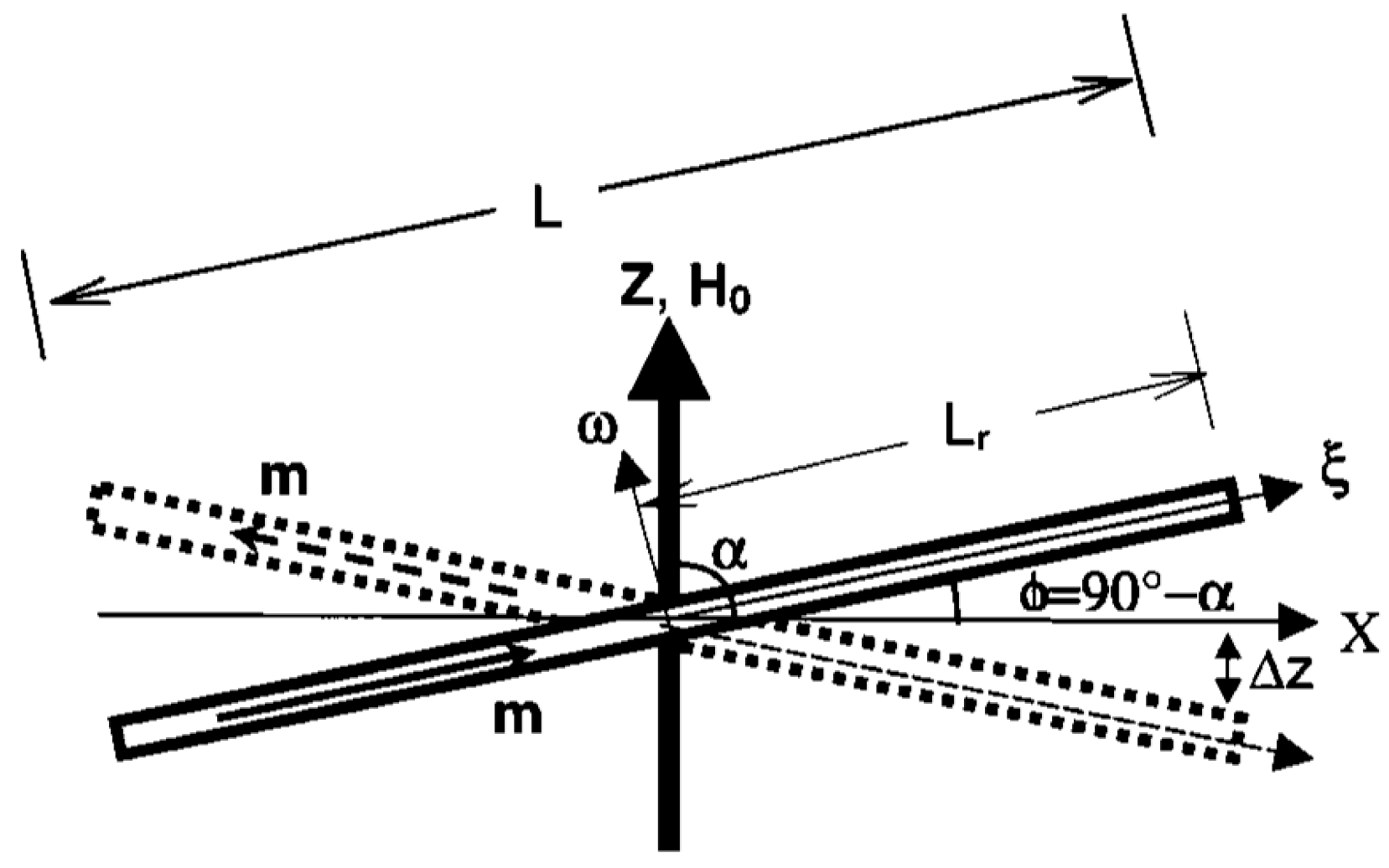
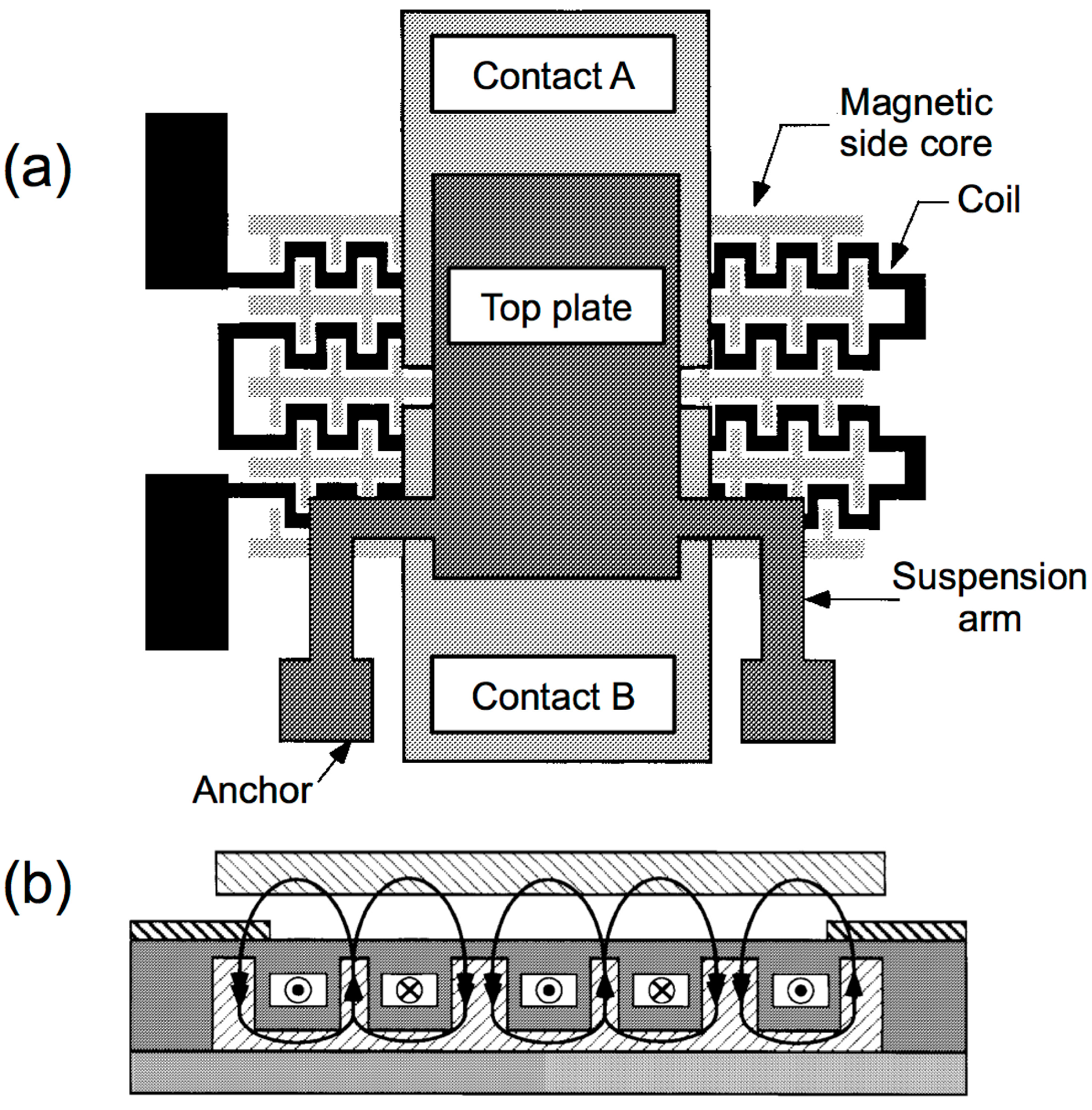
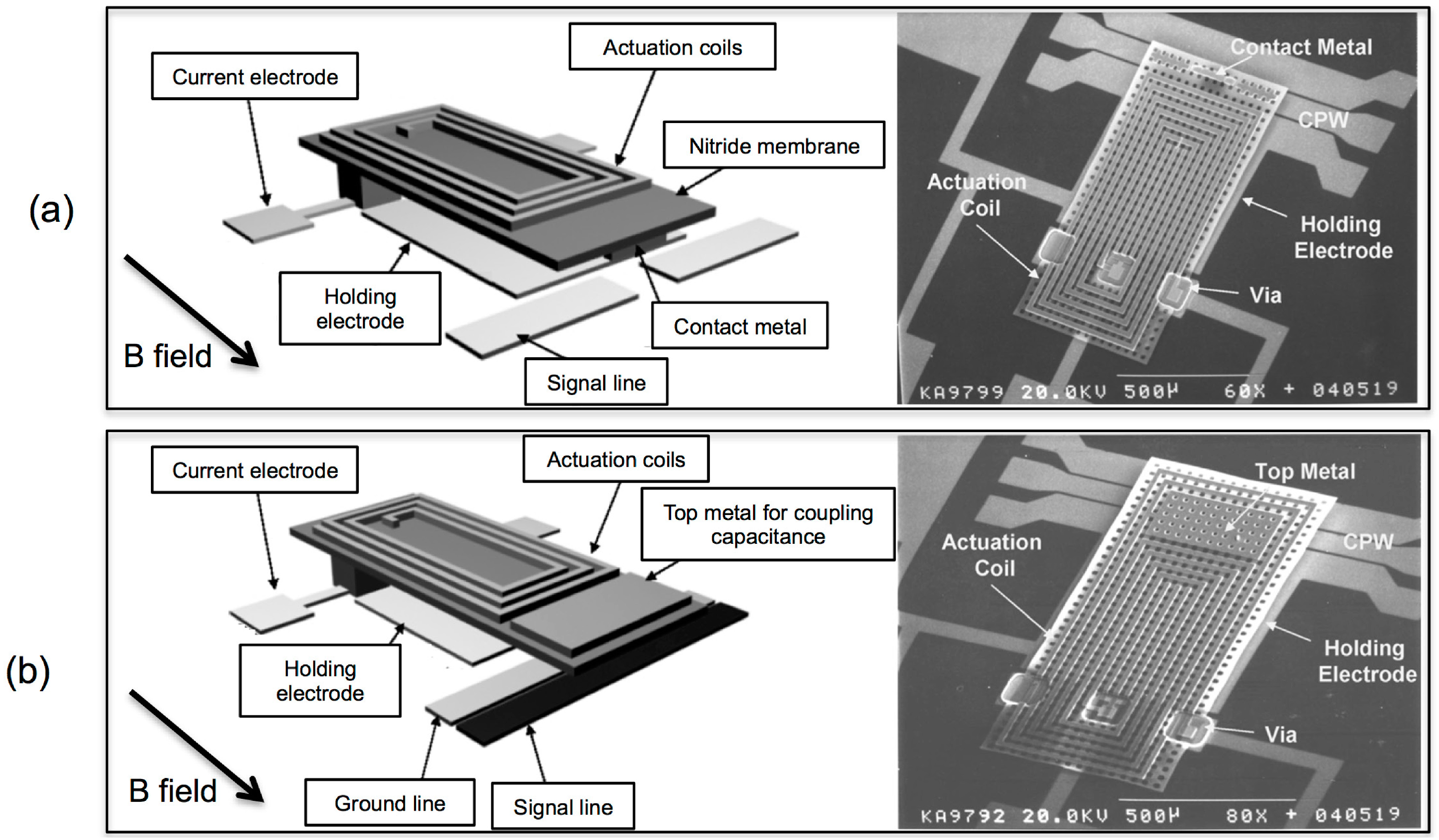
4.3. Cho et al. (2005) [83]

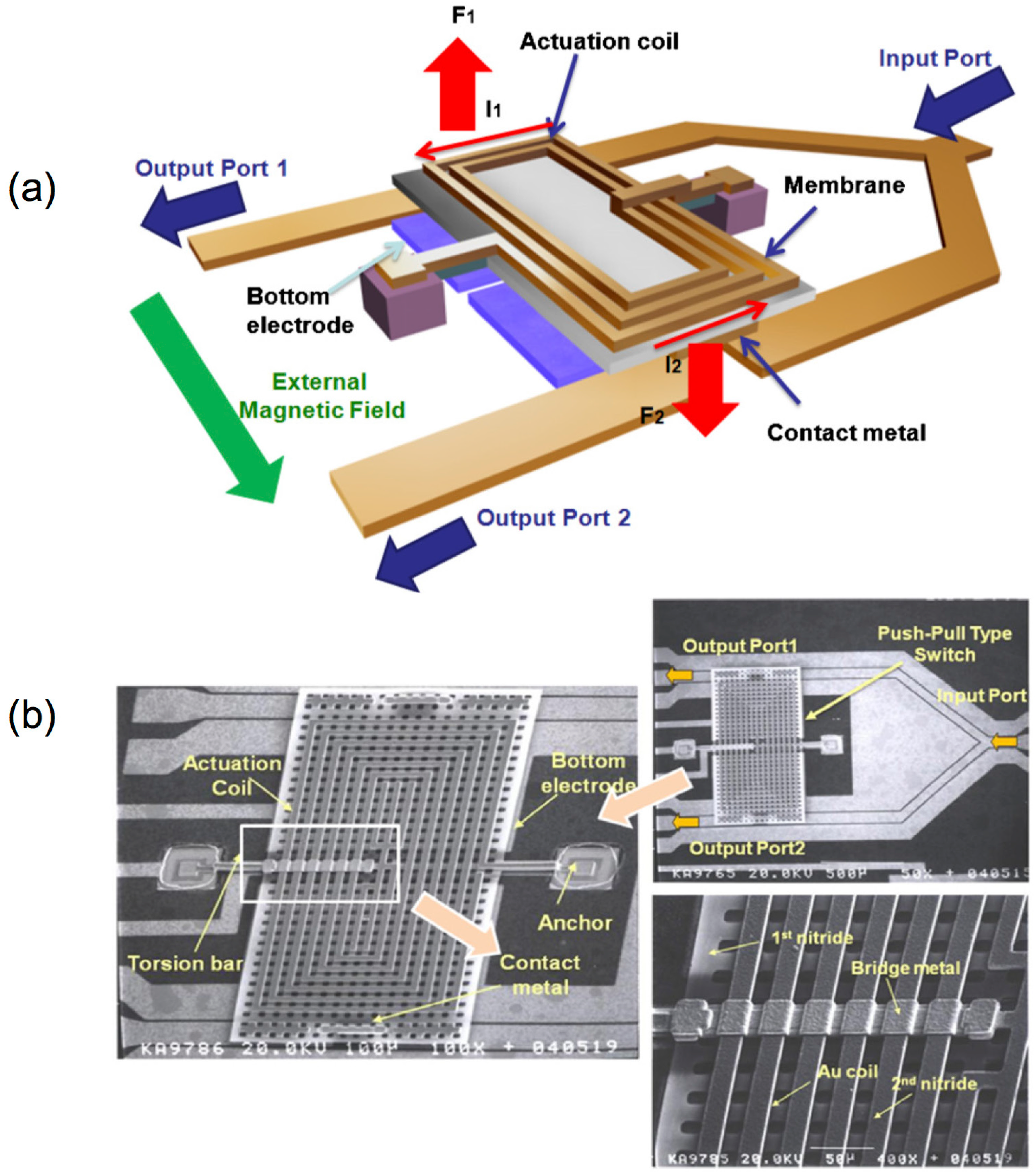
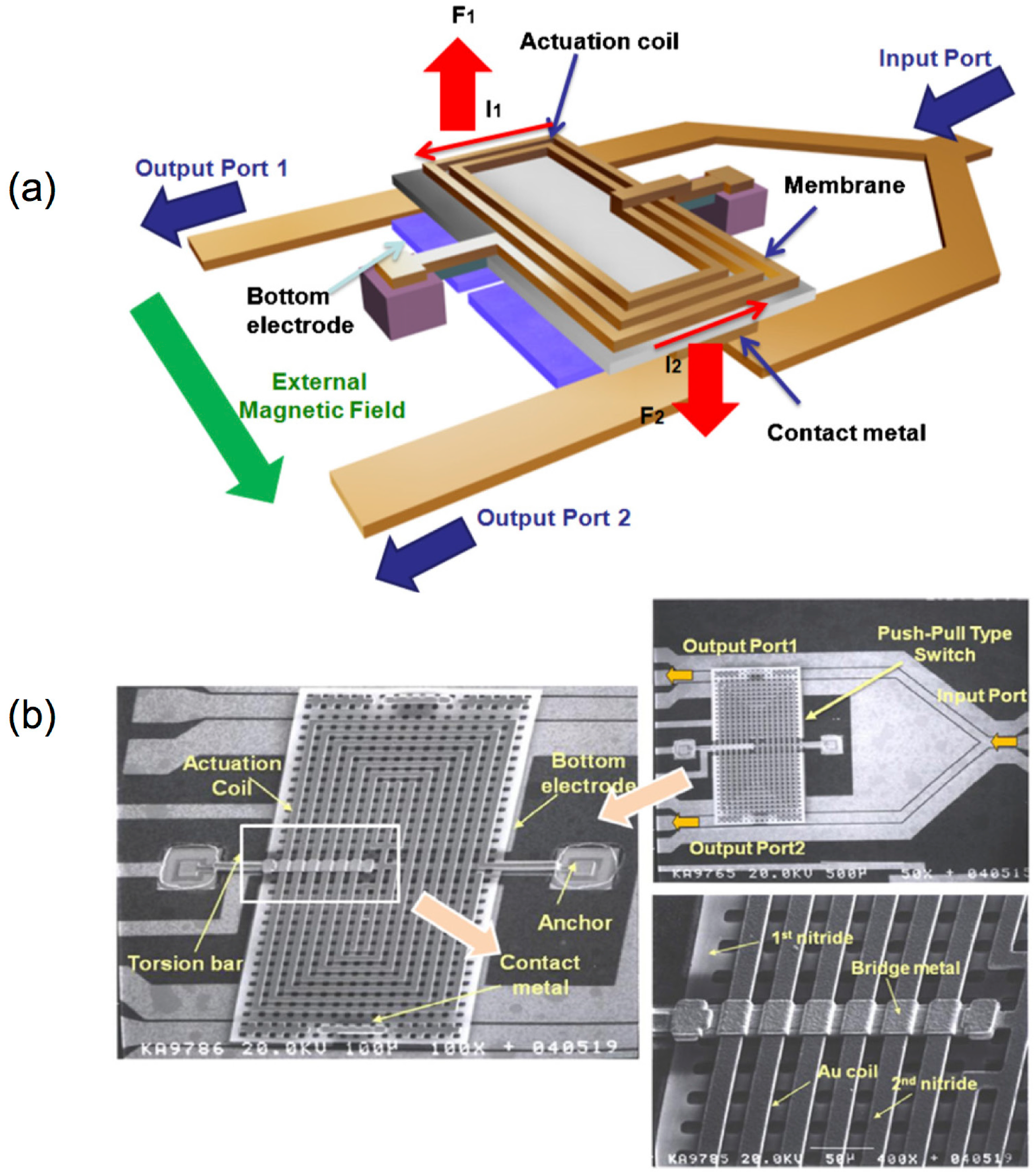
4.4. Cho et al. (2010) [135]
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
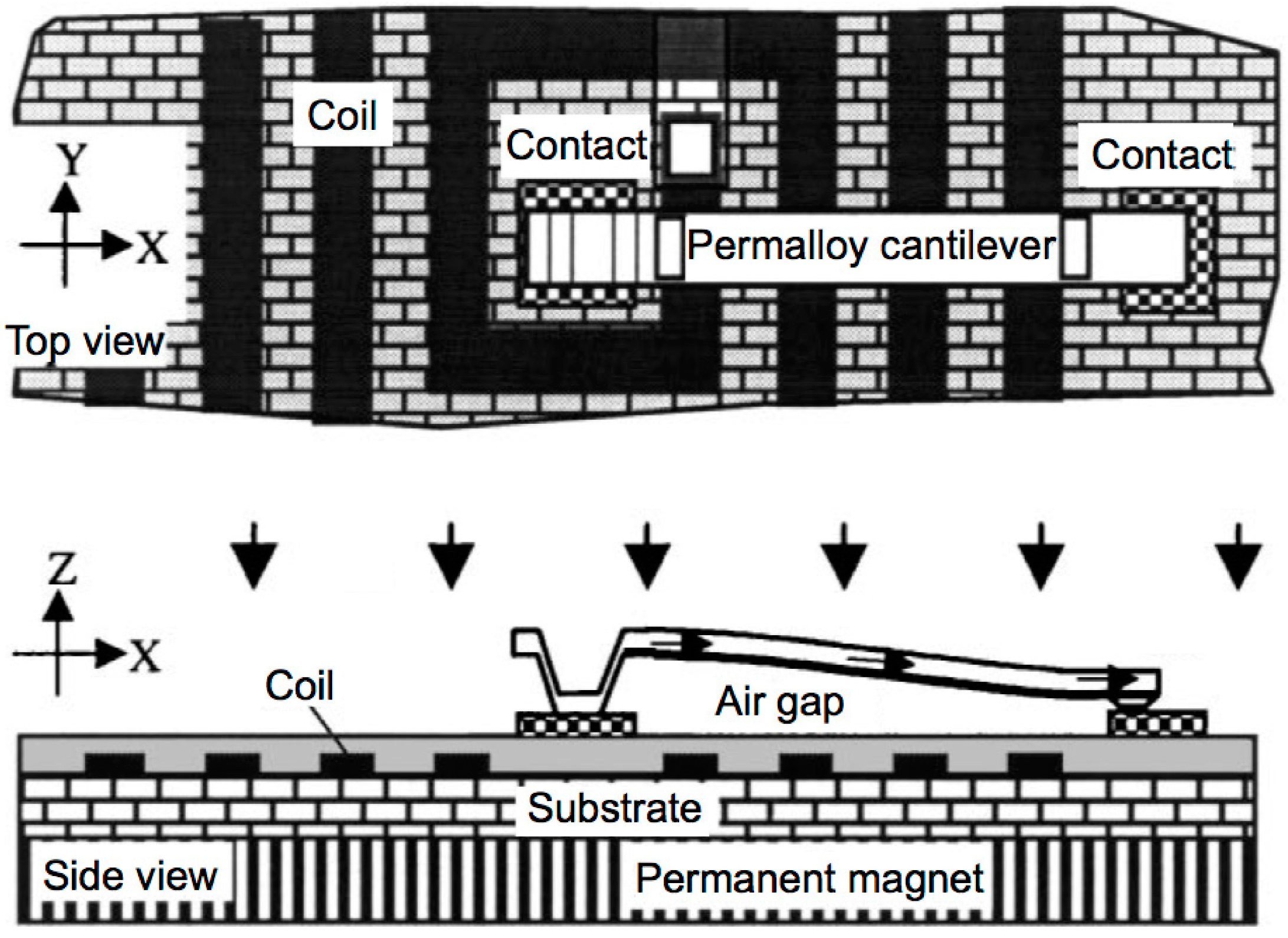
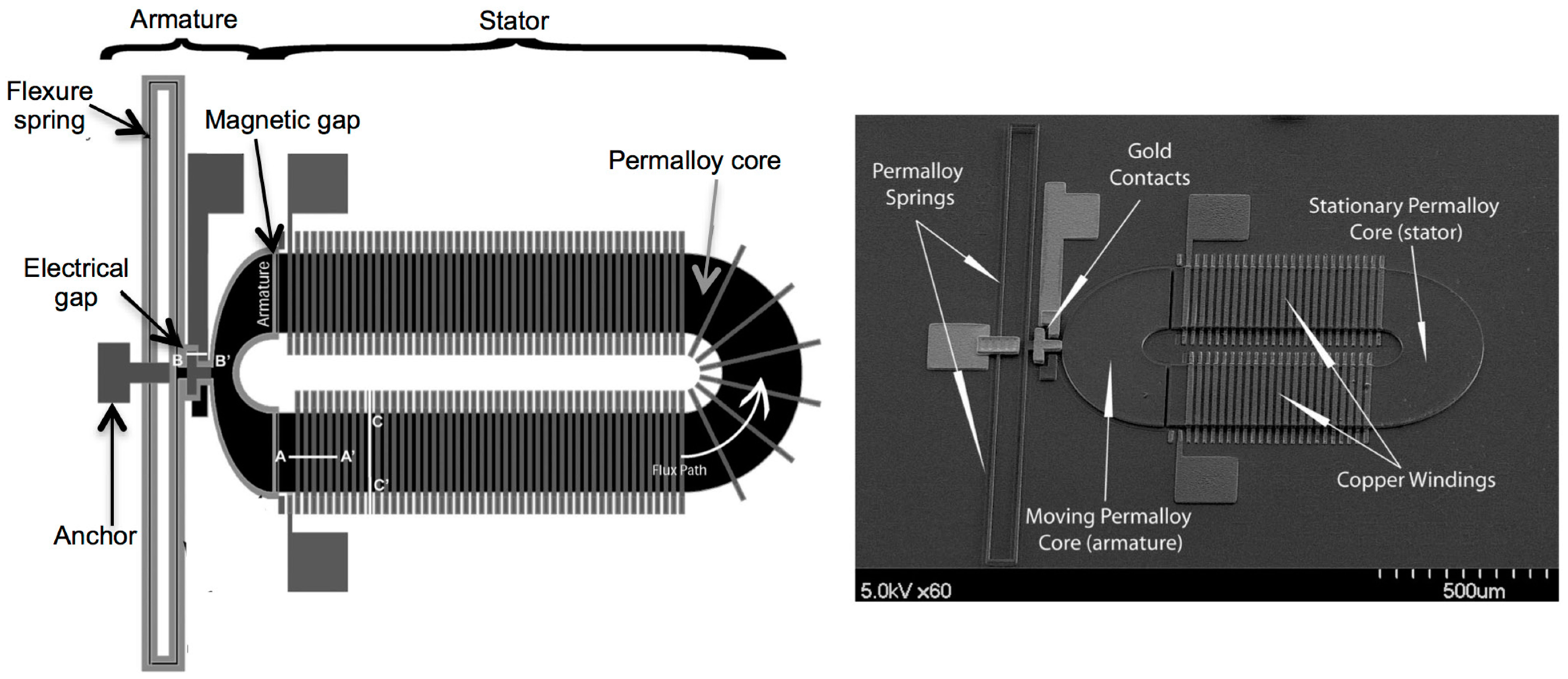
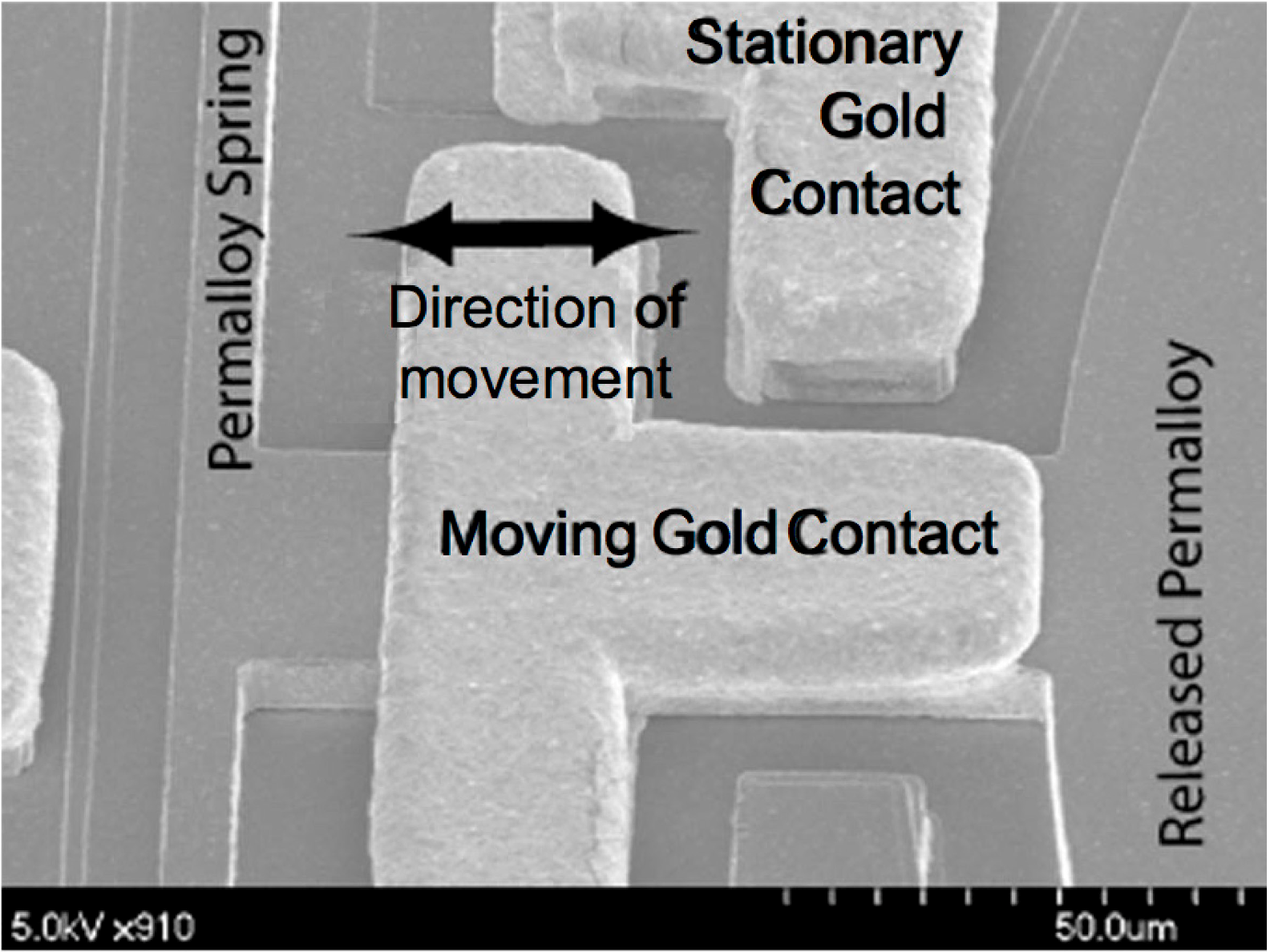
4.5. Glickman et al. [136] (2011)
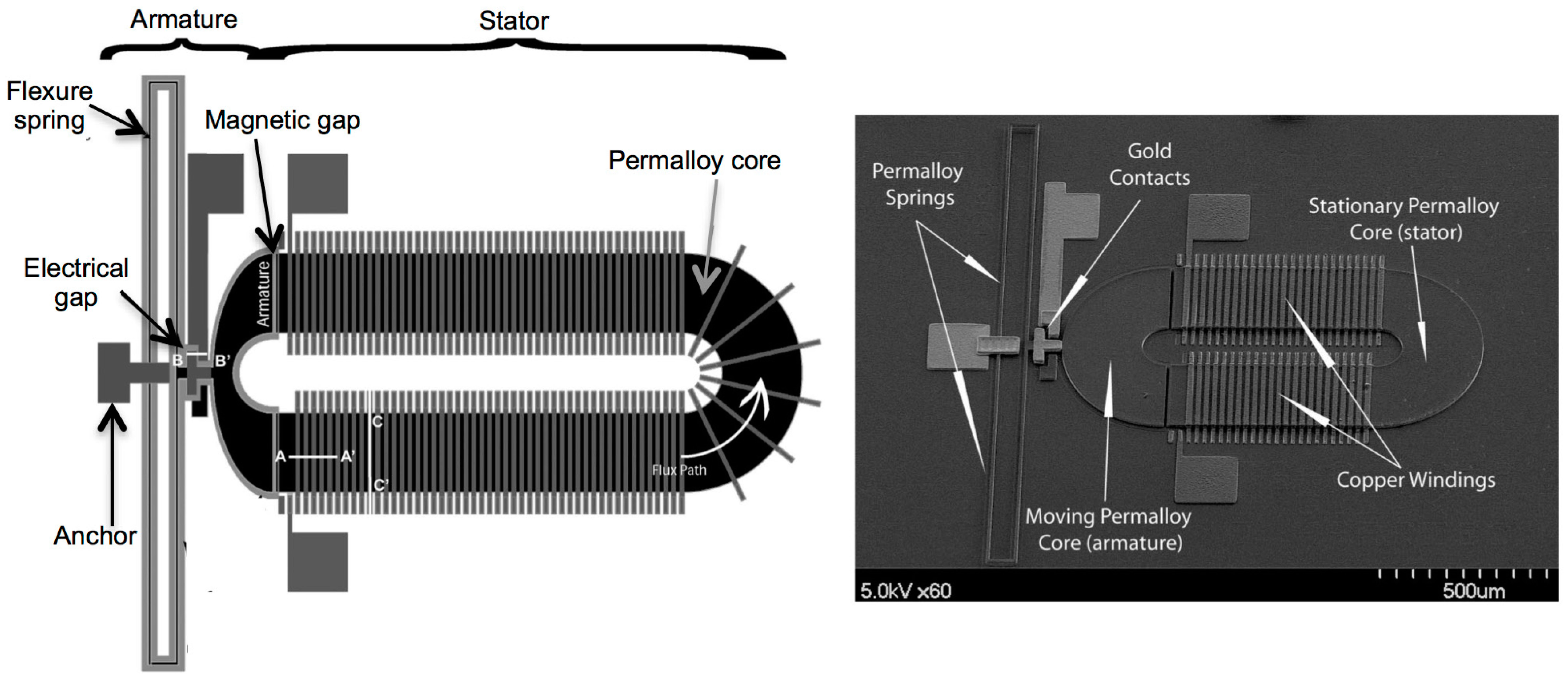
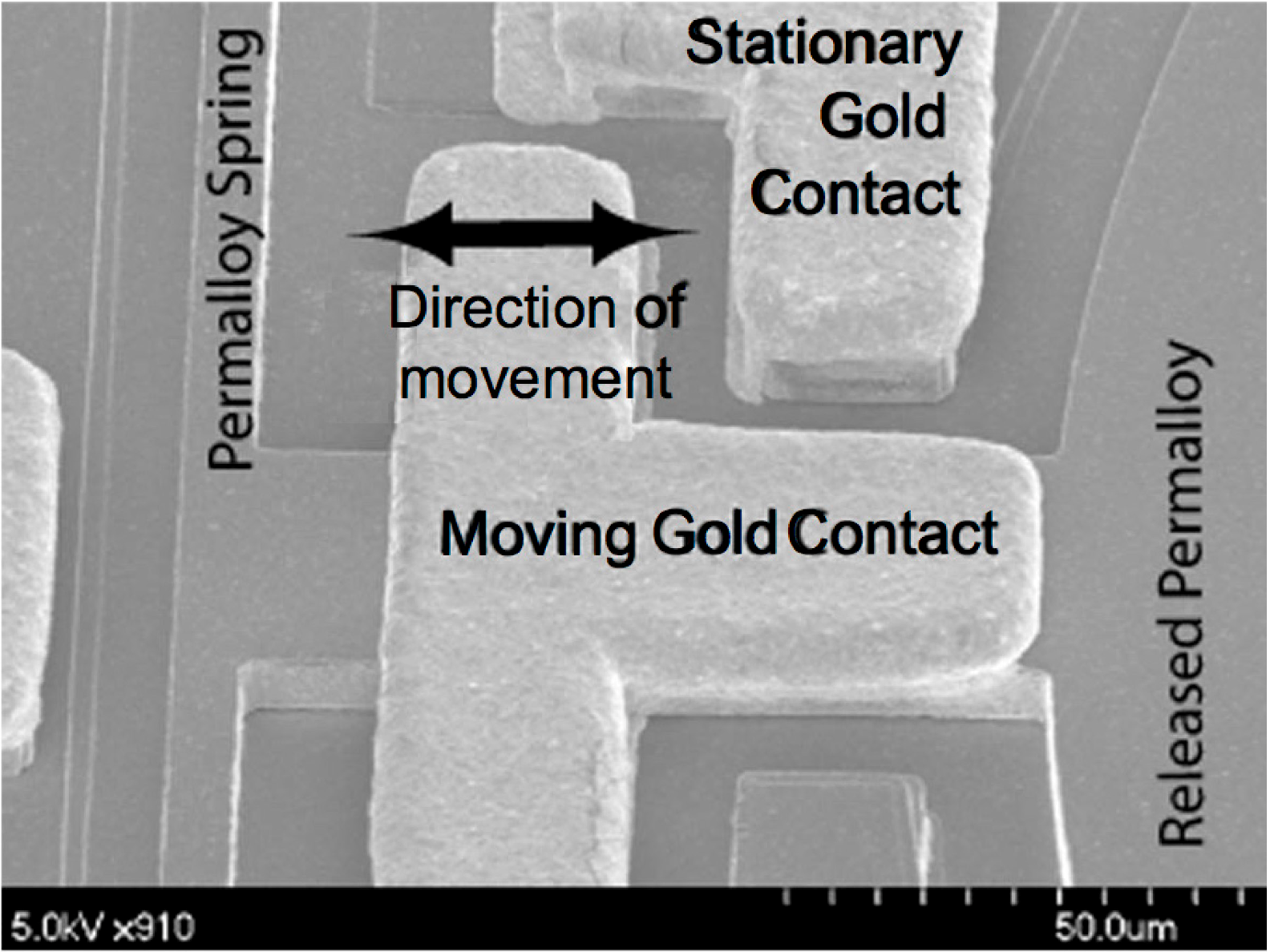
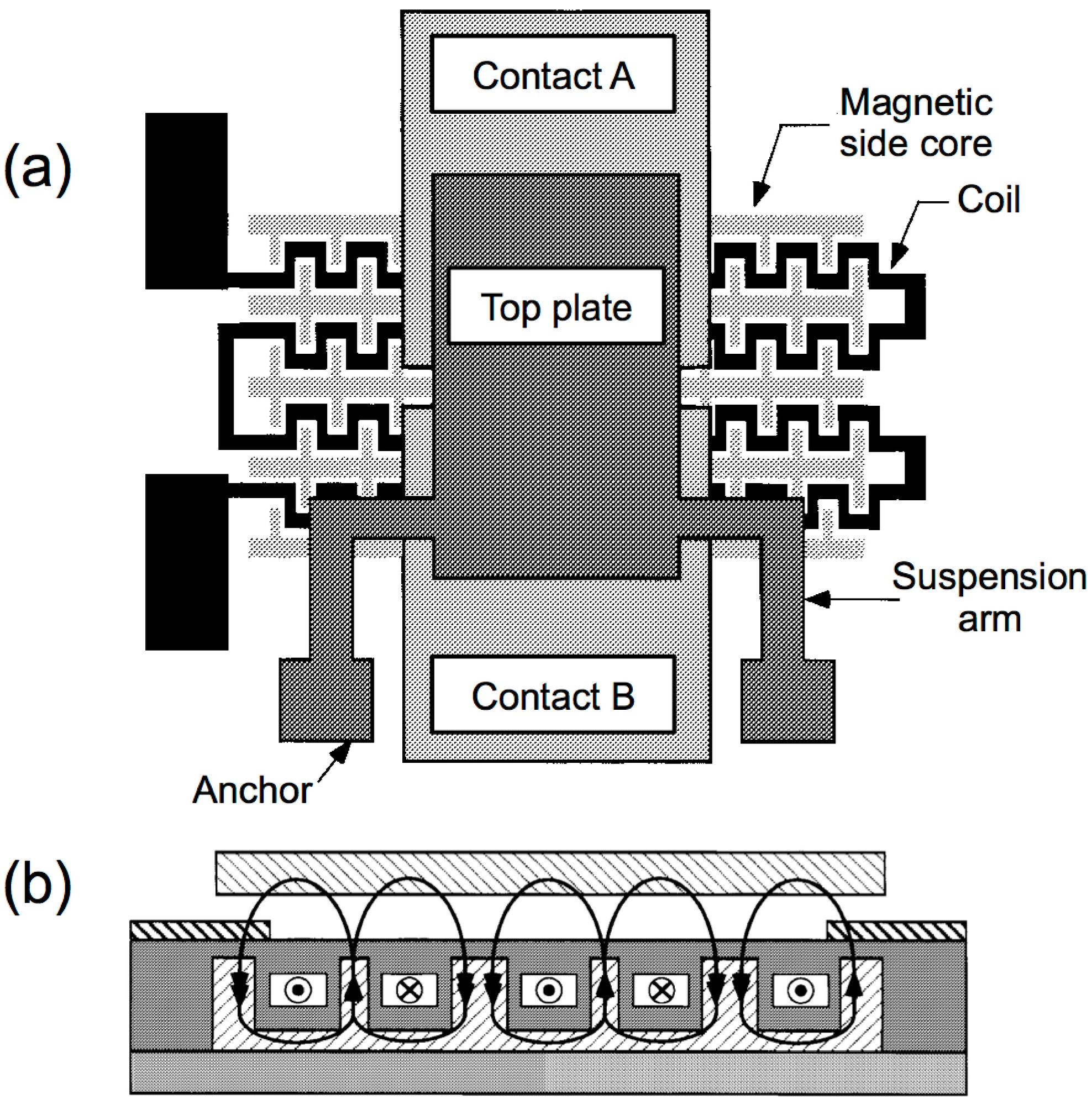
 that follows the shape of the structure. The magnetic field distribution generated by the magnetized structure in the surrounding space excites in turn the pole extension, which is then attracted to the field source in an attempt to minimize the high reluctance space region of the gap.
that follows the shape of the structure. The magnetic field distribution generated by the magnetized structure in the surrounding space excites in turn the pole extension, which is then attracted to the field source in an attempt to minimize the high reluctance space region of the gap.5. Discussion
5.1. Summary of the Reviewed Devices: Classification by Smart Power Handling and Full Integrability
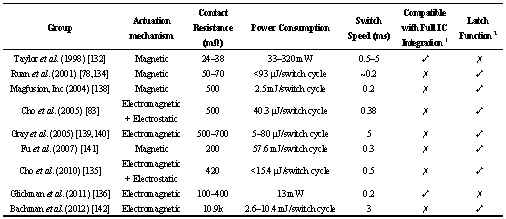
| Group | Actuation mechanism | Contact Resistance (mΩ) | Power Consumption | Switch Speed (ms) | Compatible with Full IC Integration 1 | Latch Function 2 |
|---|---|---|---|---|---|---|
| Taylor et al. (1998) [132] | Magnetic | 24–38 | 33–320 mW | 0.5–5 | ✓ | ✗ |
| Ruan et al. (2001) [78,134] | Magnetic | 50–70 | <93 µJ/switch cycle | ~0.2 | ✗ | ✓ |
| Magfusion, Inc (2004) [138] | Magnetic | 500 | 2.5 mJ/switch cycle | 0.2 | ✗ | ✓ |
| Cho et al. (2005) [83] | Electromagnetic + Electrostatic | 500 | 40.3 µJ/switch cycle | 0.38 | ✗ | ✓ |
| Gray et al. (2005) [139,140] | Electromagnetic | 500–700 | 5–80 µJ/switch cycle | 5 | ✗ | ✓ |
| Fu et al. (2007) [141] | Magnetic | 200 | 57.6 mJ/switch cycle | 0.3 | ✗ | ✓ |
| Cho et al. (2010) [135] | Electromagnetic + Electrostatic | 420 | <15.4 µJ/switch cycle | 0.5 | ✗ | ✓ |
| Glickman et al. (2011) [136] | Electromagnetic | 100–400 | 13 mW | 0.2 | ✓ | ✗ |
| Bachman et al. (2012) [142] | Electromagnetic | 10.9k | 2.6–10.4 mJ/switch cycle | 3 | ✗ | ✓ |
5.2. Performance Trends
| Benchmark Parameter | Values for Earlier Devices | Values for Recent Devices | Avg. Improvement |
|---|---|---|---|
| Power consumption (non-latching) | 33 mW [132] | 13 mW [136] | 60.6% reduction |
| Power consumption (latching) | 93 µJ [78,134]–2.5 mJ [138] | 5 µJ [140]–15.4 µJ [135] | 99.21% reduction |
| Switching speed | 0.2 ms [138]–0.5 ms [132] | 0.2 ms [136]–0.5 ms [135] | No improvement |
| Contact resistance | 24 mΩ [132]–500 mΩ [138] | 100 mΩ [136]–420 mΩ [135] | No improvement |
| Lifetime | 850k cyc. [132]–4.8M cyc. [78] | 3M cyc. [136]–100M cyc. [135] | 16× increase |
| Device area | 10 mm2 [134]–25 mm2 [132] | 0.5 mm2 [135]–2 mm2 [136] | 92.86% reduction |
| Contact force | 25.2 µN [83]–60 µN [132] | 46.2 µN [135]–200 µN [136] | 1.89× increase |
| Max frequency | 6 GHz [138] | 3 GHz [140]–20 GHz [135] | 1.92× increase |
| Min isolation | 45 dB [138] | 36 dB [135]–50 dB [140] | No improvement |
| Max insertion loss | 0.5 dB [138] | 0.34 dB [140]–0.52 dB [135] | 14% reduction |
5.3. Future Research
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Ko, W.H. Trends and frontiers of MEMS. Sens. Actuators A Phys. 2007, 136, 62–67. [Google Scholar] [CrossRef]
- Wise, K.D. Integrated sensors, MEMS, and microsystems: Reflections on a fantastic voyage. Sens. Actuators A Phys. 2007, 136, 39–50. [Google Scholar] [CrossRef]
- Tanaka, M. An industrial and applied review of new MEMS devices features. Microelectron. Eng. 2007, 84, 1341–1344. [Google Scholar]
- Bryzek, J. Impact of MEMS technology on society. Sens. Actuators A Phys. 1996, 56, 1–9. [Google Scholar] [CrossRef]
- Bao, M.; Wang, W. Future of microelectromechanical systems (MEMS). Sens. Actuators A Phys. 1996, 56, 135–141. [Google Scholar] [CrossRef]
- Lang, W. Reflexions on the future of microsystems. Sens. Actuators A Phys. 1999, 72, 1–15. [Google Scholar] [CrossRef]
- Niarchos, D. Magnetic MEMS: Key issues and some applications. Sens. Actuators A Phys. 2003, 109, 255–262. [Google Scholar] [CrossRef]
- Rebeiz, G.M.; Muldavin, J.B. RF MEMS switches and switch circuits. IEEE Microw. Mag. 2001, 4, 59–71. [Google Scholar]
- Choi, J.Y.; Ruan, J.; Coccetti, F.; Lucyszyn, S. Three-dimensional RF MEMS switch for power applications. IEEE Trans. Ind. Electron. 2009, 56, 1031–1039. [Google Scholar] [CrossRef]
- Rebeiz, G.M. RF MEMS switches: Status of the technology. In Proceedings of the 12th International Conference on Solid State Sensors, Actuators and Microsystems, Boston, MA, USA, 8–12 June 2003; pp. 1726–1729.
- Brown, E.R. RF-MEMS Switches for reconfigurable integrated circuits. IEEE Trans. Microw. Theory Tech. 1998, 46, 1868–1880. [Google Scholar] [CrossRef]
- Rebeiz, G.M. RF MEMS—Theory, Design and Technology; John Wiley&Sons, Inc.: Hoboken, NJ, USA, 2003. [Google Scholar]
- Li, X.; Lang, L.; Liu, J.; Xia, Y.; Yin, L.; Hu, J.B.; Fang, D.; Zhang, H. Electro-thermally Actuated RF MEMS switch for wireless communication. In Proceedings of the 5th IEEE International Conference on Nano/Micro Engineered and Molecular Systems, Xiamen, China, 20–23 January 2010; pp. 497–500.
- Pal, J.; Zhu, Y.; Lu, J.; Dao, D.V.; Khan, F. RF MEMS switches for smart antennas. Microsyst. Technol. 2014, 20, 1–9. [Google Scholar] [CrossRef]
- Cho, J.H.; Ahn, C.H. A Bidirectional mmagnetic microactuator using electroplated permanent magnet arrays. IEEE J. Microelectromech. Syst. 2002, 11, 78–84. [Google Scholar]
- Getpreecharsawas, J.; Puchades, I.; Hournbuckle, B.; Fuller, L.; Pearson, R.; Lyshevski, S. An electromagnetic MEMS actuator for micropumps. In Proceedings of the 2nd International Conference on Perspective Technologies and Methods in MEMS Design, Lviv, Ukraine, 24–27 May 2006; pp. 11–14.
- Wright, J.A.; Tai, Y.C.; Chang, S.C. A large-force, fully-integrated MEMS magnetic actuator. In Proceedings of the International Conference on Solid State Sensors and Actuators, TRANSDUCERS’97, Chicago, IL, USA, 16–19 June 1997; pp. 793–796.
- Robert, P.; Saias, D.; Billard, C.; Boret, S.; Sillon, N.; Maeder-Pachurka, C.; Charvet, P.L.; Bouche, G.; Ancey, P.; Berruyer, P. Integrated RF-MEMS switch based on a combination of thermal and electrostatic actuation. In Proceedings of the 12th IEEE International Conference on Solid State Sensors, Actuators and Microsystems, Boston, MA, USA, 8–12 June 2003; pp. 1714–1717.
- Qiu, J.; Lang, J.H.; Slocum, A.H.; Strümpler, R. A high-current electrothermal bistable MEMS relay. In Proceedings of the IEEE Sixteenth Annual International Conference on Micro Electro Mechanical Systems, Kyoto, Japan, 19–23 January 2003; pp. 64–67.
- Daneshmand, M.; Fouladi, S.; Mansour, R.R.; Lisi, M.; Stajcer, T. Thermally actuated latching RF MEMS switch and its characteristics. IEEE Trans. Microw. Theory Tech. 2009, 57, 3229–3238. [Google Scholar] [CrossRef]
- Touati, S.; Lorphelin, N.; Kanciurzewski, A.; Robin, R.; Rollier, A.; Mille, O.; Segueni, K. Low actuation voltage totally free flexible RF MEMS switch with antistiction system. In Proceedings of the Symposium on Design, Test, Integration and Packaging of MEMS/MOEMS, Nice, France, 9–11 April 2008; pp. 67–70.
- Kaynak, M.; Wietstruck, M.; Scholz, R.; Drews, J.; Barth, R.; Ehwald, K.E.; Fox, A.; Haak, U.; Knoll, D.; Korndorfer, F.; et al. BiCMOS embedded RF-MEMS switch for above 90 GHz applications using backside integration technique. In Proceedings of the 2010 International Electron Devices Meeting (IEDM), San Francisco, CA, USA, 6–8 December 2010; pp. 36.5.1–36.5.4.
- Goggin, R.; Wong, J.E.; Hecht, B.; Fitzgerald, P.; Schirmer, M. Fully integrated, high yielding, high reliability DC contact MEMS switch technology&control IC in standard plastic packages. In Proceedings of the IEEE Conference on Sensors, Limerick, Ireland, 28–31 October 2011; pp. 958–961.
- Maciel, J.; Majumder, S.; Lampen, J.; Guthy, C. Rugged and reliable ohmic MEMS switches. In Proceedings of the IEEE MTT-S International Microwave Symposium Digest (MTT), Montreal, Canada, 17–22 June 2012; pp. 1–3.
- Patel, C.D.; Rebeiz, G.M. A high-reliability high-linearity high-power RF MEMS metal-contact switch for DC-40-GHz applications. IEEE Trans. Microw. Theory Tech. 2012, 60, 3096–3112. [Google Scholar] [CrossRef]
- Wang, L.F.; Han, L.; Tang, J.Y.; Huang, Q.A. Lateral contact three-state RF MEMS switch for ground wireless communication by actuating rhombic structures. IEEE J. Microelectromech. Syst. 2013, 22, 10–12. [Google Scholar] [CrossRef]
- Cohn, M.B.; Saechao, K.; Whitlock, M.; Brenman, D.; Tang, W.T.; Proie, R.M. RF MEMS switches for wide I/O data bus applications. In Proceedings of the IEEE International Test Conference (ITC), Anaheim, CA, USA, 6–13 September 2013; pp. 1–8.
- Hwang, J.; Hwang, S.H.; Lee, Y.S.; Kim, Y.K. A low-loss RF MEMS silicon switch using reflowed glass structure. In Proceedings of the IEEE 27th International Conference on Micro Electro Mechanical Systems (MEMS), San Francisco, CA, USA, 26–30 January 2014; pp. 1233–1236.
- Koul, S.K.; Dey, S. RF MEMS true-time-delay phase shifter. In Micro and Smart Devices and Systems; Springer (India) Private Ltd.: New Dehli, India, 2014; pp. 467–485. [Google Scholar]
- Angira, M.; Rangra, K. Design and investigation of a low insertion loss, broadband, enhanced self and hold down power RF-MEMS switch. Microsyst. Technol. 2014, 20, 1–6. [Google Scholar] [CrossRef]
- Seki, T.; Yamamoto, J.; Murakami, A.; Yoshitake, N.; Hinuma, K.I.; Fujiwara, T.; Sano, K.; Matsushita, T.; Sato, F.; Oba, M. An RF MEMS switch for 4G Front-Ends. In Proceedings of the IEEE MTT-S International Microwave Symposium Digest (IMS), Seattle, WA, USA, 2–7 June 2013; pp. 1–3.
- Luo, X.; Ning, Y.; Molinero, D.; Palego, C.; Hwang, J.C.M.; Goldsmith, C.L. Intermodulation distortion of actuated MEMS capacitive switches. In Proceedings of the IEEE Microwave Measurement Conference (ARFTG), Seattle, WA, USA, 7 June 2013; pp. 1–3.
- Dey, S.; Koul, S.K. Design and development of miniaturized high isolation MEMS SPDT switch for Ku-band T/R module application. In Proceedings of the IEEE MTT-S International Microwave and RF Conference, New Delhi, India, 14–16 December 2013; pp. 1–4.
- Verger, A.; Pothie, A.; Guines, C.; Blondy, P.; Vendier, O.; Courtade, F. Nanogap MEMS micro-relay with 70 ns switching speed. In Proceedings of the 25th IEEE International Conference on Micro Electro Mechanical Systems (MEMS), Paris, France, 29 January–2 February 2012; pp. 717–720.
- Chakraborty, A.; Kundu, A.; Dhar, S.; Maity, S.; Chatterjee, S.; Gupta, B. Compact K-band distributed RF MEMS phase shifter based on high-speed switched capacitors. In Proceedings of the 11th Mediterranean Microwave Symposium (MMS), Hammamet, Tunisia, 8–10 September 2011; pp. 25–28.
- Proie, R.M.; Polcawich, R.G.; Pulskamp, J.S.; Ivanov, T.; Zaghloul, M.E. Development of a PZT MEMS switch architecture for low-power digital applications. IEEE J. Microelectromech. Syst. 2011, 20, 1032–1042. [Google Scholar]
- Tabib-Azar, M.; Venumbaka, S.R.; Alzoubi, K.; Saab, D. 1 Volt, 1 GHz NEMS switches. In Proceedings of the IEEE Sensors Conference, Kona, HI, USA, 1–4 November 2010; pp. 1424–1426.
- Yamane, D.; Sun, W.; Seita, H.; Kawasaki, S.; Fujita, H.; Toshiyoshi, H. An SOI bulk-micromachined dual SPDT RF-MEMS switch by layer-wise separation design of waveguide and switching mechanism. IEICE Electron. Express 2010, 7, 80–85. [Google Scholar] [CrossRef]
- Chan, K.; Ramer, R. A novel RF MEMS switch with novel mechanical structure modeling. J. Micromech. Microeng. 2010, 20. [Google Scholar] [CrossRef]
- Van Spengen, W.M.; Puers, R.; Martens, R.; de Wolf, I. A comprehensive model to predict the charging and reliability of capacitive RF MEMS switches. J. Micromech. Microeng. 2004, 14, 514–521. [Google Scholar] [CrossRef]
- Blondy, P.; Crunteanu, A.; Champeaux, C.; Catherinot, A.; Tristant, P.; Vendier, O.; Cazaux, J.L.; Marchand, L. Dielectric less capacitive MEMS switches. In Proceedings of the IEEE MTT-S International Microwave Symposium Digest, Fort Worth, TX, USA, 6–11 June 2004; pp. 573–576.
- Massenz, A.; Barbato, M.; Giliberto, V.; Margesin, B.; Colpo, S.; Meneghesso, G. Investigation methods and approaches for alleviating charge trapping phenomena in ohmic RF-MEMS switches submitted to cycling test. Microelectron. Reliab. 2011, 51, 1887–1891. [Google Scholar] [CrossRef]
- Li, G.; Zhang, W.; Li, P.; Sang, S.; Hu, J.; Chen, X. Investigation of charge injection and relaxation in multilayer dielectric stacks for capacitive RF MEMS switch application. IEEE Trans. Electron Devices 2013, 60, 2379–2387. [Google Scholar] [CrossRef]
- Chu, C.; Shih, W.; Chung, S.; Tsai, H.; Chang, T.S.P. A low actuation voltage electrostatic actuator for RF MEMS switch applications. J. Micromech. Microeng. 2007, 17, 1649–1656. [Google Scholar]
- Pacheco, S.P.; Katehi, L.P.B.; Nguyen, C.T.C. Design of low actuation voltage RF MEMS switch. In Proceedings of International Microwave Symposium Digest, Boston, MA, USA, 11–16 June 2000; pp. 165–168.
- Robin, R.; Touati, S.; Segueni, K.; Millet, O.; Buchaillot, L. A new four states high deflection low actuation voltage electrostatic MEMS switch for RF applications. In Proceedings of the Symposium on Design, Test, Integration and Packaging of MEMS/MOEMS, Nice, France, 9–11 April 2008; pp. 56–59.
- Hah, D.; Yoon, E.; Hong, S. A low-voltage actuated micromachined microwave switch using torsion springs and leverage. IEEE Trans. Microw. Theory Tech. 2000, 48, 2540–2545. [Google Scholar]
- Bell, D.J.; Lu, T.J.; Fleck, N.A.; Spearing, S.M. MEMS actuators and sensors: observations on their performance and selection for purpose. J. Micromech. Microeng. 2005, 15, S153–S164. [Google Scholar]
- Van Spengen, W.M. MEMS reliability from a failure mechanisms perspective. Microelectron. Reliab. 2003, 43, 1049–1060. [Google Scholar]
- Vincent, M.; Chiesi, L.; Fourrier, J.; Garnier, A.; Grappe, B.; Lapiere, C.; Coutier, C.; Samperio, A.; Paineau, S.; Houze, F.; Noel, S. Electrical contact reliability in a magnetic MEMS switch. In Proceedings of the 54th IEEE Holm Conference on Electrical Contacts, Orlando, FL, USA, 27–29 October 2008; pp. 145–150.
- Lin, T.H.; Paula, S.; Lu, S.; Lu, H. A study on the performance and reliability of magnetostatic actuated RF MEMS switches. Microelectron. Reliab. 2009, 49, 59–65. [Google Scholar]
- Persano, A.; Tazzoli, A.; Cola, A.; Siciliano, P.; Meneghesso, G.; Quaranta, F. Reliability enhancement by suitable actuation waveforms for capacitive RF MEMS switches in III–V technology. IEEE J. Microelectromech. Syst. 2012, 21, 414–419. [Google Scholar]
- Newman, H.S. RF MEMS switches and applications. In Proceedings of the 40th IEEE Annual International Reliability Physics Symposium, Dallas, TX, USA, 7–11 April 2002; pp. 111–115.
- Coutu, R.A.; Kladitis, P.E.; Leedy, K.D.; Crane, R.L. Selecting metal alloy electric contact materials for MEMS switches. J. Micromech. Microeng. 2004, 14, 1157–1164. [Google Scholar]
- Coutu, R.A.; Reid, J.R.; Cortez, R.; Strawser, R.E.; Kladitis, P.E. Microswitches with sputtered Au, AuPd, Au-on-AuPt, and AuPtCu alloy electric contacts. IEEE Trans. Compon. Packag. Technol. 2006, 29, 341–349. [Google Scholar]
- Kwon, H.; Choi, D.J.; Park, J.H.; Lee, H.C.; Park, Y.H.; Kim, Y.D.; Nam, H.J.; Joo, Y.C.; Bu, J.U. Contact materials and reliability for high power RF-MEMS switches. In Proceedings of the IEEE 20th International Conference on Micro Electro Mechanical Systems, Hyogo, Japan, 21–25 January 2007; pp. 231–234.
- Lee, H.; Coutu, R.A.; Mall, S.; Leedy, K.D. Characterization of metal and metal alloy films as contact materials in MEMS switches. J. Micromech. Microeng. 2006, 16, 557–563. [Google Scholar]
- Jensen, B.D.; Huang, K.; Chow, L.; Saitou, K.; Volakis, J.L.; Kurabayashi, K. Asperity heating for repair of metal contact RF MEMS switches. In Proceedings of the 2004 IEEE MTT-S International Microwave Symposium Digest, Fort Worth, TX, USA, 6–11 June 2004; pp. 1939–1942.
- Goldsmith, C.; Ehmke, J.; Malczewski, A.; Pillans, B.; Eshelman, S.; Yao, Z.; Brank, J.; Eberly, M. Lifetime characterization of capacitive RF MEMS switches. In Proceedings of the 2001 IEEE MTT-S International Microwave Symposium Digest, Phoenix, AZ, USA, 20–24 May 2001; pp. 227–230.
- Marcelli, R.; Papaioannu, G.; Catoni, S.; de Angelis, G.; Lucibello, A.; Proietti, E.; Margesin, B.; Giacomozzi, F.; Deborgies, F. Dielectric charging in microwave microelectromechanical ohmic series and capacitive shunt switches. J. Appl. Phys. 2009, 105. [Google Scholar] [CrossRef]
- Marcelli, R.; Bartolucci, G.; Papaioannu, G.; de Angelis, G.; Lucibello, A.; Proietti, E.; Margesin, B.; Giacomozzi, F.; Deborgies, F. Reliability of RF MEMS switches due to charging effects and their circuital modelling. Microsyst. Technol. 2010, 16, 1111–1118. [Google Scholar]
- Persano, A.; Tazzoli, A.; Farinelli, P.; Meneghesso, G.; Siciliano, P.; Quaranta, F. K-band capacitive MEMS switches on GaAs substrate: Design, fabrication, and reliability. Microelectron. Reliab. 2012, 51, 2245–2249. [Google Scholar]
- Kruglick, E.; Pister, K. Lateral MEMS microcontact considerations. IEEE J. Microelectromech. Syst. 1999, 8, 264–271. [Google Scholar]
- Iannacci, J.; Faes, A.; Repchankova, A.; Tazzoli, A.; Meneghesso, G. An active heat-based restoring mechanism for improving the reliability of RF-MEMS switches. Microelectron. Reliab. 2011, 51, 1869–1873. [Google Scholar]
- Jensen, B.D.; Chow, L.L.W.; Huang, K.; Saitou, K.; Volakis, J.L.; Kurabayashi, K. Effect of nanoscale heating on electrical transport in RF MEMS switch contacts. IEEE J. Microelectromech. Syst. 2005, 14, 935–946. [Google Scholar]
- Patton, S.T.; Zabinski, J.S. Fundamental studies of Au contacts in MEMS RF switches. Tribol. Lett. 2005, 18, 215–230. [Google Scholar]
- Tazzoli, A.; Meneghesso, G. Acceleration of microwelding on ohmic RF-MEMS switches. IEEE J. Microelectromech. Syst. 2011, 20, 552–554. [Google Scholar]
- Lucibello, A.; Marcelli, R.; Proietti, E.; Bartolucci, G.; Mulloni, V.; Margesin, B. Reliability of RF MEMS capacitive and ohmic switches for space redundancy configurations. Microsyst. Technol. 2013, 19, 1–11. [Google Scholar]
- Pillans, B.; Coryell, L.; Malczewski, A.; Moody, C.; Morris, F.; Brown, A. Advances in RF MEMS phase shifters from 15 GHz to 35 GHz. In Proceedings of the IEEE MTT-S International Microwave Symposium Digest, Montreal, Canada, 17–22 June 2012; pp. 1–3.
- Katsuki, T.; Nakatani, T.; Okuda, H.; Toyoda, O.; Ueda, S.; Nakazawa, F. A highly reliable single-crystal silicon RF-MEMS switch using Au sub-micron particles for wafer level LTCC cap packaging. In Proceedings of the 2nd IEEE CPMT Symposium Japan, Kyoto, Japan, 10–12 December 2012; pp. 1–4.
- Tas, N.; Sonnenberg, T.; Jansen, H.; Legtenberg, R.; Elwenspoek, M. Stiction in surface micromachining. J. Micromech. Microeng. 1996, 6, 385–397. [Google Scholar]
- Grant, P.; Denhoff, M.; Mansour, R. A comparison between RF MEMS switches and semiconductor switches. In Proceedings of the 2004 International Conference on MEMS, NANO and Smart Systems, Banff, AB, Canada, 25–27 August 2004; pp. 515–521.
- Yamagajo, T.; Koga, Y. Frequency reconfigurable antenna with MEMS switches for mobile terminals. In Proceedings of the 2011 IEEE-APS Topical Conference on Antennas and Propagation in Wireless Communications (APWC), Turin, Italy, 12–16 September 2011; pp. 1213–1216.
- Mahameed, R.; Rebeiz, G.M. RF MEMS capacitive switches for wide temperature range applications using a standard thin-film process. IEEE Trans. Microw. Theory Tech. 2011, 59, 1746–1752. [Google Scholar]
- Yang, H.H.; Yahiaoui, A.; Zareie, H.; Blondy, P.; Rebeiz, G.M. A compact high-isolation DC-50 GHz SP4T RF MEMS switch. In Proceedings of the 2014 IEEE MTT-S International Microwave Symposium (IMS), Tampa, FL, USA, 1–6 June 2014; pp. 1–4.
- Yao, J.J. RF MEMS from a device perspective. J. Micromech. Microeng. 2000, 10, R9–R38. [Google Scholar]
- Yao, Z.J.; Chen, S.; Eshelman, S.; Denniston, D.; Goldsmith, C. Micromachined low-loss microwave switches. IEEE J. Microelectromech. Syst. 1999, 8, 129–134. [Google Scholar]
- Ruan, M.; Shen, J.; Wheeler, C.B. Latching microelectromagnetic relays. Sens. Actuators A Phys. 2001, 91, 346–350. [Google Scholar]
- Tan, G.L.; Mihailovich, R.; Hacker, J.B.; DeNatale, J.F.; Rebeiz, G.M. Low-loss 2- and 4-bit TTD MEMS phase shifters based on SP4T switches. IEEE Trans. Microw. Theory Tech. 2003, 51, 297–304. [Google Scholar]
- Wang, Y.; Li, Z.; McCormick, D.T.; Tien, N.C. A low-voltage lateral MEMS switch with high RF performance. IEEE J. Microelectromech. Syst. 2004, 13, 902–911. [Google Scholar]
- Liu, A.; Palei, W.; Tang, M.; Alphones, A. Single-pole-four-throw switch using high-aspect-ratio lateral switches. Electron. Lett. 2004, 40, 1125–1126. [Google Scholar]
- Lee, H.C.; Park, J.Y.; Lee, K.H.; Nam, H.J.; Bu, J.U. Silicon bulk micromachined RF MEMS switches with 3.5 volts operation by using piezoelectric actuator. In Proceedings of the 2004 IEEE MTT-S International Microwave Symposium Digest, Fort Worth, TX, USA, 6–11 June 2004; pp. 585–588.
- Cho, I.; Song, T.; Baek, S.H.; Yoon, E. A low-voltage and low-power RF MEMS series and shunt switches actuated by combination of electromagnetic and electrostatic forces. IEEE Trans. Microw. Theory Tech. 2005, 53, 2450–2457. [Google Scholar]
- Lee, J.; Je, C.H.; Kang, S.; Choi, C.A. A low-loss single-pole six-throw switch based on compact RF MEMS switches. IEEE Trans. Microw. Theory Tech. 2005, 53, 3335–3344. [Google Scholar]
- Kang, S.; Kim, H.C.; Chun, K. A low-loss, single-pole, four-throw RF MEMS switch driven by a double stop comb drive. J. Micromech. Microeng. 2009, 19, 1–10. [Google Scholar]
- Kang, S.; Kim, H.C.; Chun, K. A low-loss, single-pole, four-throw RF MEMS switch driven by a double stop comb drive. J. Micromech. Microeng. 2009, 19, 1–10. [Google Scholar]
- Luo, J.K.; Pritschow, M.; Flewitt, A.J.; Spearing, S.M.; Fleck, N.A.; Milne, W.I. Effects of process conditions on properties of electroplated Ni thin films for microsystem applications. J. Electrochem. Soc. 2006, 153, D155–D161. [Google Scholar]
- Arai, K.I.; Honda, T. Micromagnetic actuators. Robotica 1996, 14, 477–481. [Google Scholar]
- Hadian, S.E.; Gabe, D.R. Residual stresses in electrodeposits of nickel and nickel–iron alloys. Surf. Coat. Technol. 1999, 122, 118–135. [Google Scholar]
- Mathúna, C.O.; Wang, N.; Kulkarni, S.; Roy, S. Review of integrated magnetics for power supply on chip (PwrSoC). IEEE Trans. Power Electron. 2012, 27, 4799–4816. [Google Scholar]
- O’Donnel, T.; Wang, N.N.; Kulkarni, S.; Meere, R.; Rhen, F.M.F.; Roy, S.; Mathúna, C.O. Electrodeposited anisotropic NiFe 45/55 thin films for high-frequency micro-inductor applications. J. Magn. Magn. Mater. 2010, 322, 1690–1693. [Google Scholar]
- Koo, B.; Yoo, B. Electrodeposition of low-stress NiFe thin films from a highly acidic electrolyte alloys. Surf. Coat. Technol. 2010, 205, 740–744. [Google Scholar]
- Flynn, D.; Desmulliez, M.P.Y. Influence of pulse reverse plating on the properties of Ni–Fe thin films. IEEE Trans. Magn. 2010, 46, 979–985. [Google Scholar]
- Schiavone, G.; Desmulliez, M.P.Y.; Smith, S.; Murray, J.; Sirotkin, E.; Terry, J.G.; Mount, A.R.; Walton, A.J. Quantitative wafer mapping of residual stress in electroplated NiFe films using independent strain and Young’s modulus measurements. In Proceedings of the 2012 IEEE International Conference on Microelectronic Test Structures (ICMTS 2012), San Diego, CA, USA, 19–22 March 2012; pp. 105–110.
- Judy, J.W. Microelectromechanical systems (MEMS): Fabrication, design and applications. Smart Mater. Struct. 2001, 10, 1115–1134. [Google Scholar]
- Paschen, F. Ueber die zum Funkenübergang in Luft, Wasserstoff und Kohlensäure bei verschiedenen Drucken erforderliche Potentialdifferenz. Ann. Phys. 1889, 273, 69–96. (In German) [Google Scholar] [CrossRef]
- Meek, J.M.; Craggs, J.D. Electrical Breakdown of Gases; Oxford At The Clarendon Press: Oxford, UK, 1953. [Google Scholar]
- Torres, J.; Dhariwal, R. Electric field breakdown at micrometre separations. Nanotechnology 1999, 10, 102–107. [Google Scholar]
- Furlani, E.P. Permanent Magnet and Electromechanical Devices: Materials, Analysis, and Applications (Electromagnetism); Academic Press: Waltham, MA, USA, 2001. [Google Scholar]
- Bernstein, J.J.; Taylor, W.P.; Brazzle, J.D.; Corcoran, C.J.; Kirkos, G.; Odhner, J.E.; Pareek, A.; Waelti, M.; Zai, M. Electromagnetically actuated mirror arrays for use in 3-D optical switching applications. IEEE J. Microelectromech. Syst. 2004, 13, 526–535. [Google Scholar]
- Blasko, A.S. Integrated Mems Power-Save Switch. U.S. Patent 6,833,597 B2, 21 December 2004. [Google Scholar]
- Agashe, J.S.; Arnold, D.P. A study of scaling and geometry effects on the forces between cuboidal and cylindrical magnets using analytical force solutions. J. Phys. D Appl. Phys. 2008, 41. [Google Scholar] [CrossRef]
- Arnold, D.P.; Wang, N. Permanent magnets for MEMS. IEEE J. Microelectromech. Syst. 2009, 18, 1255–1266. [Google Scholar]
- Pina, E.; Palomares, F.J.; Garcia, M.A.; Cebollada, F.; de Hoyos, A.; Romero, J.J.; Hernando, A.; Gonzalez, J.M. Coercivity in SmCo hard magnetic films for MEMS application. J. Magn. Magn. Mater. 2005, 290, 1234–1236. [Google Scholar]
- Budde, T.; Gatzen, H.H. Thin film Sm–Co magnets for use in electromagnetic microactuators. J. Appl. Phys. 2006, 99. [Google Scholar] [CrossRef]
- Walther, A.; Givord, D.; Dempsey, N.M.; Khlopkov, K.; Gutfleisch, O. Structural, magnetic, and mechanical properties of 5 μm thick SmCo films suitable for use in microelectromechanical systems. J. Appl. Phys. 2008, 103. [Google Scholar] [CrossRef] [Green Version]
- Thongmee, S.; Ding, J.; Lin, J.Y.; Blackwood, D.J.; Yi, J.B.; Yin, J.H. FePt films fabricated by electrodeposition. J. Appl. Phys. 2007, 101. [Google Scholar] [CrossRef]
- Wang, N.; Arnold, D.P. Thick electroplated Co-rich Co–Pt micro magnet arrays for magnetic MEMS. IEEE Trans. Magnet. 2008, 44, 3969–3972. [Google Scholar]
- Kulkarni, S.; Roy, S. Deposition of thick Co-rich CoPtP films with high energy product for magnetic microelectromechanical applications. J. Magn. Magn. Mater. 2010, 322, 1592–1596. [Google Scholar]
- Jamieson, B.; Godsell, J.F.; Wang, N.N.; Roy, S. Device geometry effects in an integrated power microinductor with a Ni45Fe55 enhancement layer. IEEE Trans. Magn. 2013, 49, 869–873. [Google Scholar]
- Cadieu, F.J.; Chen, L.; Li, B. Enhanced magnetic properties of nanophase SmCo5 film dispersions. IEEE Trans. Magn. 2001, 37, 2570–2572. [Google Scholar]
- Nakano, M.; Sato, S.; Fukunaga, H.; Yamashita, F. A method of preparing anisotropic Nd–Fe–B film magnets by pulsed laser deposition. J. Appl. Phys. 2006, 99. [Google Scholar] [CrossRef]
- Nakano, M.; Shibata, S.; Yanai, T.; Fukunaga, H. Anisotropic properties in Fe–Pt thick film magnets. J. Appl. Phys. 2009, 105. [Google Scholar] [CrossRef]
- Romero, J.J.; Cuadrado, R.; Pina, E.; do Hoyos, A.; Pigazo, F.; Palomares, F.L.; Hernando, A.; Sastre, R.; Gonzalez, J.M. Anisotropic polymer bonded hard-magnetic films for micro-electromechanical system applications. J. Appl. Phys. 2006, 99. [Google Scholar] [CrossRef]
- Bowers, B.J.; Agashe, J.S.; Arnold, D.P. A method to form bonded micromagnets embedded in silicon. In Proceedings of the 14th International Conference on Solid-State Sensors, Actuators and Microsystems (TRANSDUCERS), Lyon, France, 10–14 June 2007; pp. 1581–1584.
- Wang, N.; Bowers, B.; Arnold, D.P. Wax-bonded NdFeB micromagnets for microelectromechanical systems application. J. Appl. Phys. 2008, 103. [Google Scholar] [CrossRef]
- Chin, T.S. Permanent magnet films for applications in microelectromechanical systems. J. Magn. Magn. Mater. 2000, 209, 75–79. [Google Scholar]
- Li, H.Y.; Xie, L.; Ong, L.G.; Baram, A.; Herer, I.; Hirshberg, A.; Chong, S.C.; Kwong, D.L. Ultra-compact micro-coil realized via multilevel dense TSV coil for MEMs application. In Proceedings of the IEEE International 3D System Integration Conference, Osaka, Japan, 31 January–2 February 2012; pp. 1–4.
- Kratt, K.; Badilita, V.; Burger, T.; Korvink, J.G.; Wallrabe, U. A fully MEMS-compatible process for 3D high aspect ratio micro coils obtained with an automatic wire bonder. J. Micromech. Microeng. 2010, 20. [Google Scholar] [CrossRef]
- Zhao, Y.; Nandra, M.S.; Tai, Y.C. A MEMS intraocular origami coil. In Proceedings of the 16th International Conference on Solid-State Sensors, Actuators and Microsystems (TRANSDUCERS), Beijing, China, 5–9 June 2011; pp. 2172–2175.
- Zhao, Y.; Nandra, M.S.; Yu, C.; Tai, Y.C. Reduction of AC resistance in MEMS intraocular foil coils using microfabricated planar Litz structure. In Proceedings of the 7th IEEE International Conference on Nano/Micro Engineered and Molecular Systems (NEMS), Kyoto, Japan, 5–8 March 2012; pp. 234–237.
- Grusche, O.G.; Clad, L.; Baxan, N.; Kratt, K.; Mohmmadzadeh, M.; von Elverfeldt, D.; Peter, A.; Hennig, J.; Badilita, V.; Wallrabe, U.; Korvink, J.G. Multilayer phased microcoil array for magnetic resonance imaging. In Proceedings of the 16th International Conference on Solid-State Sensors, Actuators and Microsystems (TRANSDUCERS), Beijing, China, 5–9 June 2011; pp. 962–965.
- Xue, N.; Chang, S.P.; Lee, J.B. A SU-8-based microfabricated implantable inductively coupled passive RF wireless intraocular pressure sensor. IEEE J. Microelectromech. Syst. 2012, 21, 1338–1346. [Google Scholar]
- Cho, S.H.; Xue, N.; Cauller, L.; Rosellini, W.; Lee, J.B. A SU-8-based fully integrated biocompatible inductively powered wireless neurostimulator. IEEE J. Microelectromech. Syst. 2013, 22, 170–176. [Google Scholar]
- Sun, X.; Zheng, Y.; Li, Z.; Li, X.; Zhang, H. Stacked flexible parylene-based 3D inductors with Ni80Fe20 core for wireless power transmission system. In Proceedings of the 26th IEEE International Conference on Micro Electro Mechanical Systems (MEMS), Taipei, Taiwan, 20–24 January 2013; pp. 849–852.
- Walker, R.; Sirotkin, E.; Schmueser, I.; Terry, J.G.; Smith, S.; Stevenson, J.T.M.; Walton, A.J. Characterisation and integration of Parylene as an insulating structural layer for high aspect ratio electroplated copper coils. In Proceedings of the 2013 IEEE International Conference on Microelectronic Test Structures (ICMTS 2013), Osaka, Japan, 25–28 March 2013; pp. 7–12.
- Zheng, Y.; Sun, X.; Li, Z.; Li, X.; Zhang, H. Flexible MEMS inductors based on Parylene-FeNi Compound Substrate for wireless power transmission system. In Proceedings of the 8th IEEE International Conference on Nano/Micro Engineered and Molecular Systems (NEMS), Suzhou, China, 7–10 April 2013; pp. 1002–1005.
- Cugat, O.; Delamare, J.; Reyne, G. Magnetic micro-actuators and systems (MAGMAS). IEEE Trans. Magn. 2003, 39, 3607–3612. [Google Scholar]
- Ahn, C.H.; Allen, M.G. A fully integrated surface micromachined magnetic microactuator with a multilevel meander magnetic core. IEEE J. Microelectromech. Syst. 1993, 2, 15–22. [Google Scholar]
- Judy, J.W.; Muller, R.S. Magnetically actuated, addressable microstructures. IEEE J. Microelectromech. Syst. 1997, 6, 249–256. [Google Scholar]
- Judy, J.W.; Muller, R.S. Magnetic Microactuator. U.S. Patent 5,945,898, 31 August 1999. [Google Scholar]
- Taylor, W.P.; Brand, O.; Allen, M.G. Fully integrated magnetically actuated micromachined relays. IEEE J. Microelectromech. Syst. 1998, 7, 181–191. [Google Scholar]
- Taylor, W.P.; Allen, M.G. Integrated magnetic microrelays: Normally open, normally closed, and multi-pole devices. In Proceedings of the International Conference on Solid State Sensors and Actuators, TRANSDUCERS’97, Chicago, IL, USA, 16–19 June 1997; pp. 1149–1152.
- Ruan, M.; Shen, J.; Wheeler, C.B. Latching micromagnetic relays. IEEE J. Microelectromech. Syst. 2001, 10, 511–517. [Google Scholar]
- Cho, I.; Yoon, E. Design and fabrication of a single membrane push-pull SPDT RF MEMS switch operated by electromagnetic actuation and electrostatic hold. J. Micromech. Microeng. 2010, 20, 1–7. [Google Scholar]
- Glickman, M.; Tseng, P.; Harrison, J.; Niblock, T.; Goldberg, I.B.; Judy, J.W. High-performance lateral-actuating magnetic MEMS switch. IEEE J. Microelectromech. Syst. 2011, 20, 842–851. [Google Scholar]
- Lai, C.H.; Wong, W.S.H. Laterally actuated, low voltage, 3-port RF MEMS switch. In Proceedings of the 19th IEEE International Conference on Micro Electro Mechanical Systems, MEMS 2006, Istanbul, Turkey, 22–26 January 2006; pp. 878–881.
- Magfusion Inc. A Magnetic MEMS-Based RF Relay; Microwave Journal&Horizon House Publication: Norwood, MA, USA and London, England, UK, 2004. [Google Scholar]
- Gray, G.D., Jr.; Kohl, P.A. Magnetically bistable actuator: Part 1. Ultra-low switching energy and modeling. Sens. Actuators A Phys. 2005, 119, 489–501. [Google Scholar] [CrossRef]
- Gray, G.D., Jr.; Prophet, E.M.; Zhua, L.; Kohl, P.A. Magnetically bistable actuator: Part 2. Fabrication and performance. Sens. Actuators A Phys. 2005, 119, 502–511. [Google Scholar]
- Fu, S.; Ding, G.; Wang, H.; Yang, Z.; Feng, J. Design and fabrication of a magnetic bi-stable electromagnetic MEMS relay. Microelectron. J. 2007, 38, 556–563. [Google Scholar]
- Bachman, M.; Zhang, Y.; Wang, M.; Li, G. High-power magnetically actuated microswitches fabricated in laminates. IEEE Electron Device Lett. 2012, 33, 1309–1311. [Google Scholar]
© 2014 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Schiavone, G.; Desmulliez, M.P.Y.; Walton, A.J. Integrated Magnetic MEMS Relays: Status of the Technology. Micromachines 2014, 5, 622-653. https://doi.org/10.3390/mi5030622
Schiavone G, Desmulliez MPY, Walton AJ. Integrated Magnetic MEMS Relays: Status of the Technology. Micromachines. 2014; 5(3):622-653. https://doi.org/10.3390/mi5030622
Chicago/Turabian StyleSchiavone, Giuseppe, Marc P. Y. Desmulliez, and Anthony J. Walton. 2014. "Integrated Magnetic MEMS Relays: Status of the Technology" Micromachines 5, no. 3: 622-653. https://doi.org/10.3390/mi5030622