Robust Load Frequency Control Schemes in Power System Using Optimized PID and Model Predictive Controllers

 ,
,  ,
,  and
and
Abstract
:1. Introduction
- This study presents a complete load frequency control scheme using optimized PID and model predictive controllers.
- The robustness of the proposed control approaches are investigated against system parameters variations.
- The nonlinear governor time delay is considered to confirm the ability of the proposed control techniques for practical implementation.
- Pole zero maps for each control loop are investigated to ensure the stability of each control method and its capability to be applied over wide range of operating conditions.
2. System Dynamics
2.1. Model Predictive Controller
2.1.1. For MPC1
2.1.2. For MPC2
2.2. Optimized PID Controller
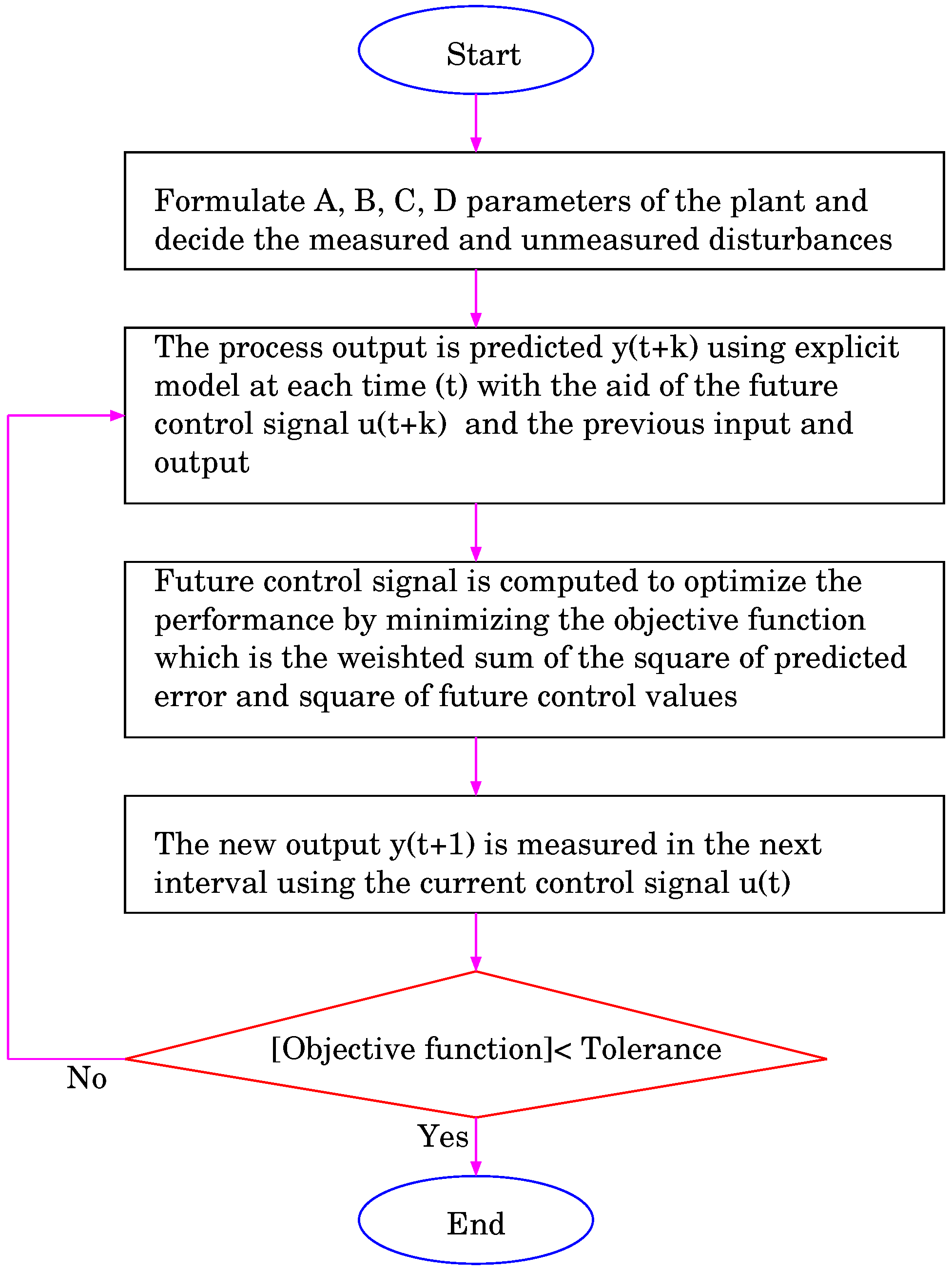
3. Model Predictive Control
- Future time horizon is used to predict the process output utilizing an explicit model at each time (t). The predicted output , …, N can be calculated using the future control signal, , …, N − 1 and the previous inputs and outputs.
- A chain of future control signals is computed to optimize a performance criterion by minimizing an objective function. The objective function to be mitigated is a weighted summation for the square of predicted errors and square of future control values.where and are weighting factors, and are the lower and upper prediction horizons over the output, and is the control horizon. The number of future control can be decreased using the control horizon by the following equations:
- is measured at the next interval using the current control signal , and then Step 1 is repeated to get . As a result, the horizon is shifted at each interval by the same length.
4. Optimized PID Controller Using Genetic Algorithm and Particle Swarm Optimization
4.1. Genetic Algorithm (GA)
- The individuals who have the best fitness value in this generation are passed directly to the next generation and called elite individuals.
- Some children are created by combining two parents who have good fitness value and are called crossover children.
- Some other children are subjected random changes and are called mutation children.
4.2. Particle Swarm Optimization (PSO)
5. Simulation Results and Comparison
5.1. MPC Parameters
- Prediction horizon = 10
- Control horizon = 2.00
- Weights on manipulated variable = 0.80
- Weights on manipulated variable rates = 0.10
- Weights on the output signals = 0.10
5.2. GA-PID Fitness Function
- Population size = 200
- Initial range = [0.5;1]
- Elite count = 2.00
- Crossover = 0.80
- Mutation = 0.20
5.3. PSO-PID Fitness Function
- Population size = 300
- Inertia weight w = 1.00
- Cognitive coefficient C1 = 1.50
- Social coefficient C2 = 2.00
5.4. Cases Study
5.4.1. First Case
5.4.2. Second Case
5.4.3. Third Case
5.4.4. Fourth Case
5.4.5. Analysis
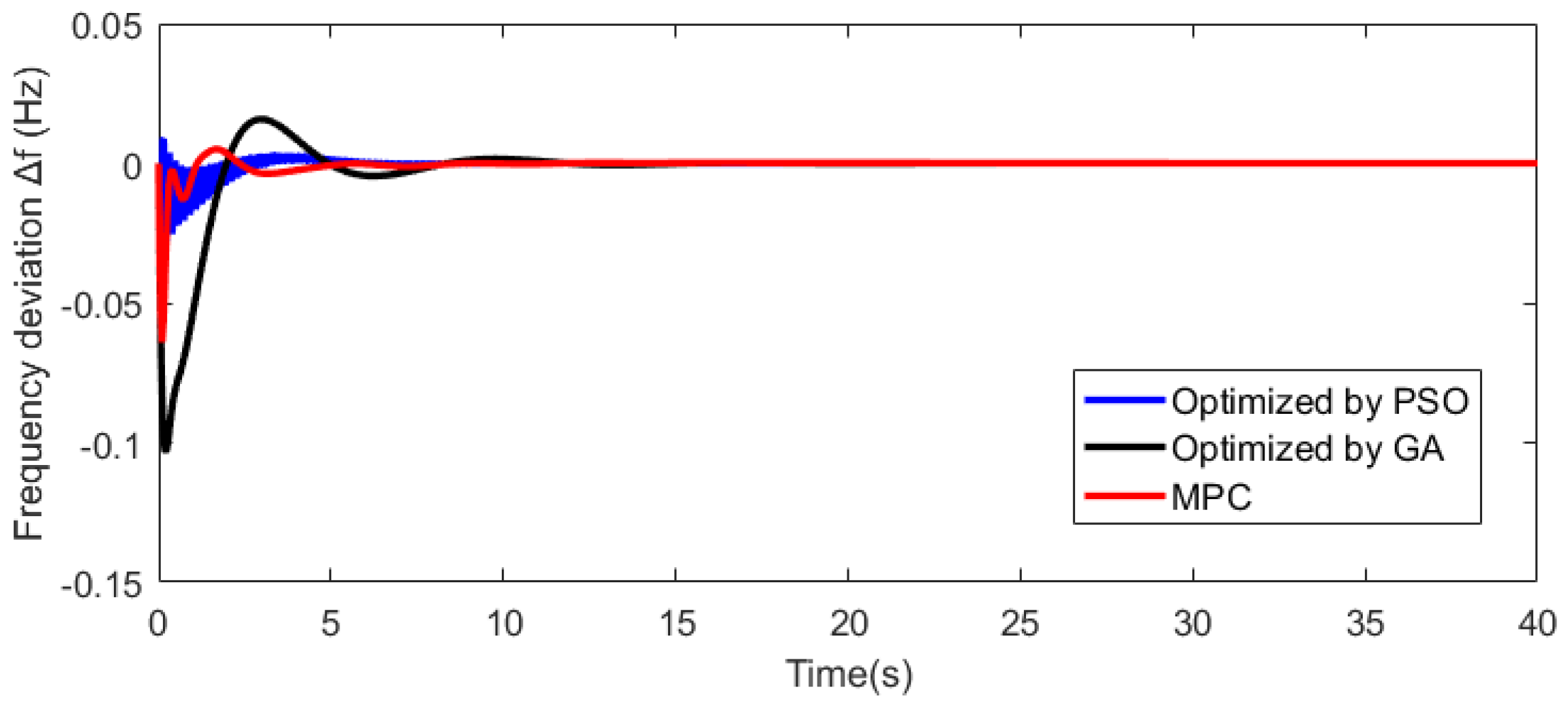
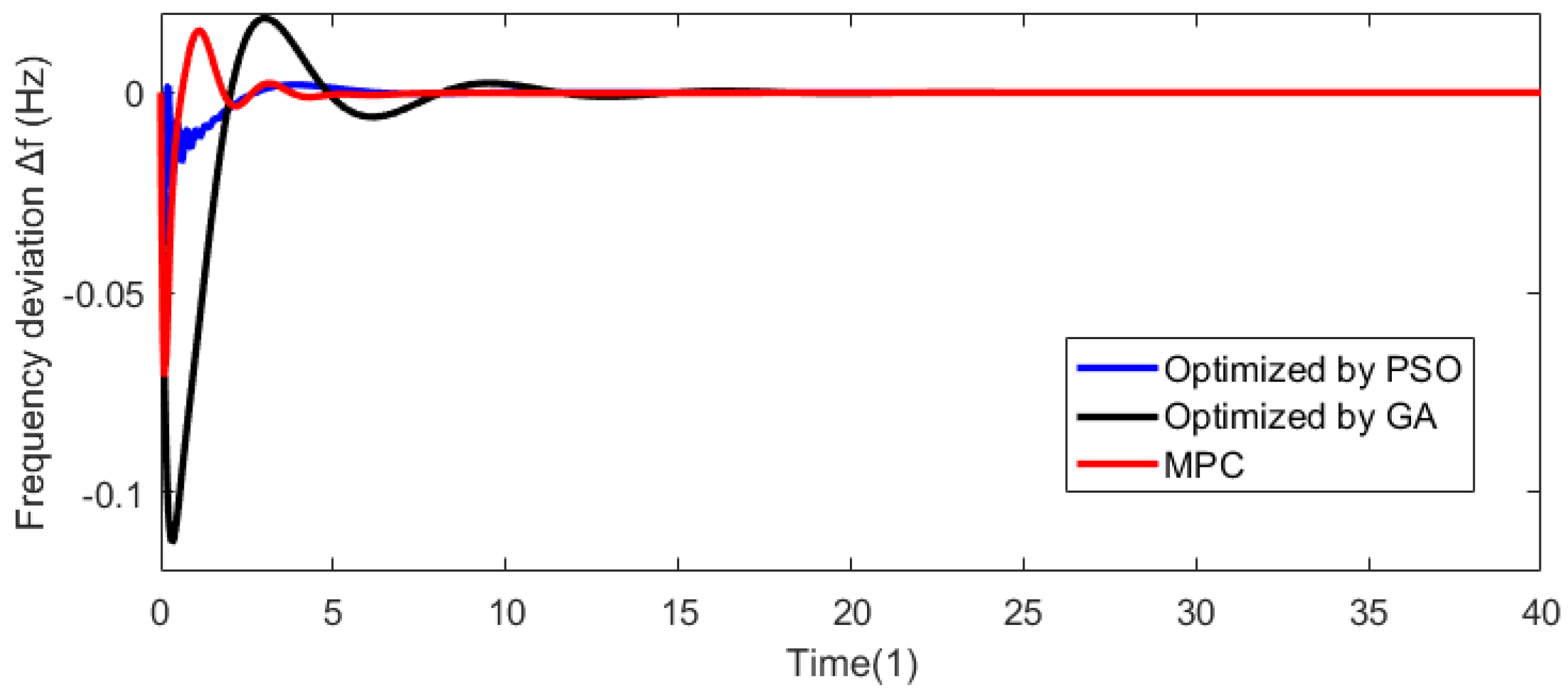
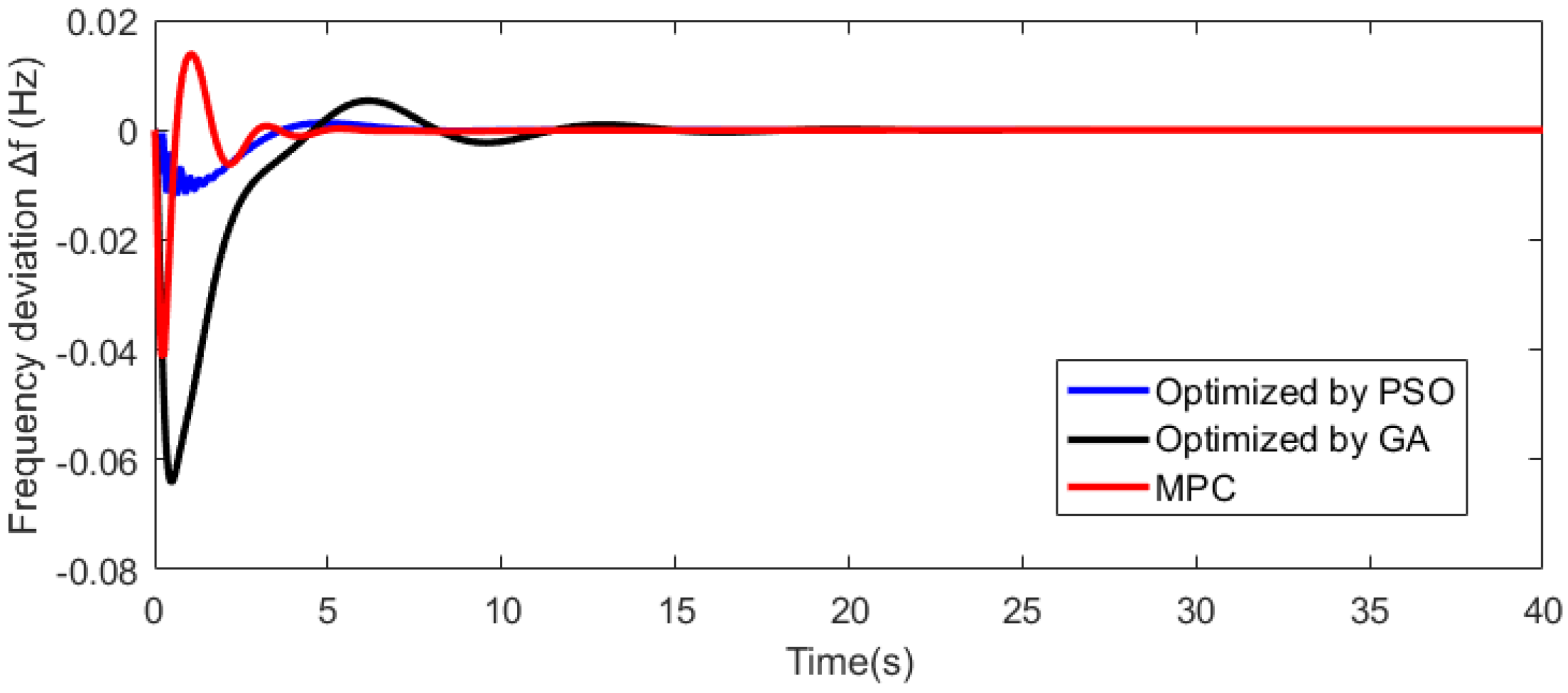
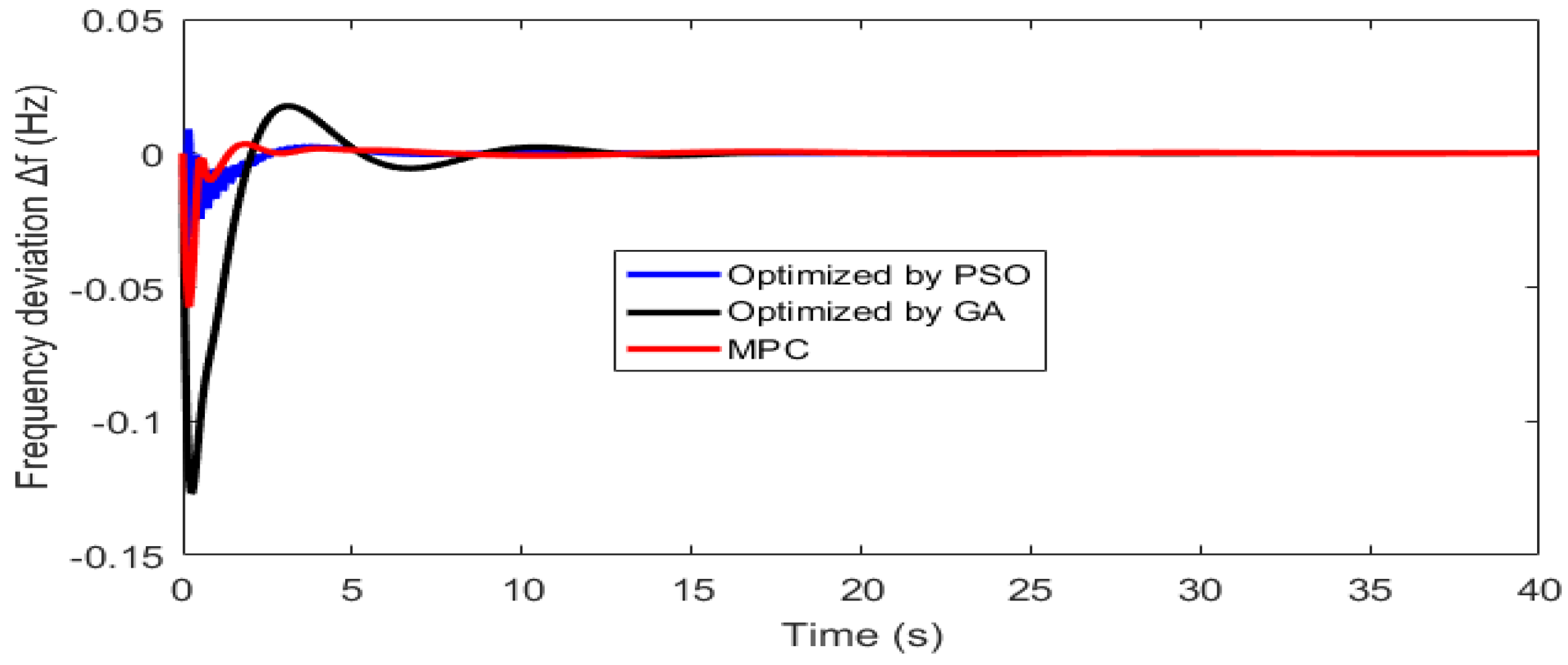
- The associated figures of the first case indicate the capability of the MPC controller and optimized PID for minimizing the settling time and damping power system fluctuations in interconnected system. MPC controller and optimized PID controller significantly improve the system stability and enhance the characteristics frequency of power supply. Moreover, the figures confirm the superiority of MPC and PSO schemes over GA for damping oscillations of f1, f2 and Ptie with less amount of over/undershoot and settling time.
- The simulation results of the second case show that the proposed controllers can bear this very severe operating condition (changing the plant gains and at percent of its nominal value) and keep its robust properties operating for damping oscillations, decreasing settling time and also decreasing overshoot and undershoot. The simulation results confirm the ability of the LFC approach based on the proposed MPC controller and optimized PID controller technique suppresses the fluctuations of the system successfully. Moreover, the proposed MPC and PSO algorithms have the best performances compared to the GA strategy with less over/undershoot and settling time.
- The simulation results of the third case show that the proposed controllers can also bear this very severe operating condition (changing the synchronizing coefficients for the tie-line at percent of its nominal value) and keep its robust properties operating for damping oscillations, decreasing settling time and also decreasing overshoot and undershoot. It is clear from the simulation results that the LFC scheme based on the proposed MPC controller and optimized PID controller approach suppresses the fluctuations of the system successfully. Furthermore, the proposed MPC and PSO algorithms have the best performances compared to the GA strategy with less over/undershoot and settling time.
- The simulation results of the fourth case show the high performance of MPC algorithm which minimizes the frequency and tie-line power fluctuations for the system more than the PSO and GA methods. The corresponding values for peak overshoot, peak undershoot and settling time associated to the proposed three cases are presented in Table 3, Table 4 and Table 5.
6. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Zhang, S.; Mishra, Y.; Shahidehpour, M. Fuzzy-logic based Load Frequency Controller for wind farms augmented with energy storage systems. IEEE Trans. Power Syst. 2016, 31, 1595–1603. [Google Scholar] [CrossRef]
- Datta, M.; Senjyu, T. Fuzzy control of distributed PV inverters/energy storage systems/electric vehicles for frequency regulation in large power system. IEEE Trans. Smart Grid 2013, 4, 479–488. [Google Scholar] [CrossRef]
- Han, Y.; Young, P.; Jain, A.; Zimmerle, D. Robust control for microgrid frequency deviation reduction with attached storage system. IEEE Trans. Smart Grid 2015, 6, 557–565. [Google Scholar] [CrossRef]
- Bevrani, H.; Feizi, M.; Ataee, S. Robust frequency control in an islanded microgrid: H∞ and μ-Synthesis approaches. IEEE Trans. Smart Grid 2016, 7, 706–717. [Google Scholar] [CrossRef]
- Sekhar, P.; Mishra, S. storage free smart energy management for frequency control in diesel-PV-fuel cell-based hybrid ac microgrid. IEEE Trans. Neural Netw. Learn. Syst. 2016, 27, 1657–1671. [Google Scholar] [CrossRef] [PubMed]
- Bevrani, H.; Habibi, F.; Babahajyani, P.; Mitani, Y. Intelligent frequency control in an ac microgrid: Online PSO-based fuzzy turning approach. IEEE Trans. Smart Grid 2012, 3, 1935–1944. [Google Scholar] [CrossRef]
- Sa-ngawong, N.; Ngamroo, I. Intelligent photovoltaic farms for robust frequency stabilization in multi-area interconnected power system based on PSO-based optimal Sugeno fuzzy logic control. Renew. Energy 2015, 74, 555–567. [Google Scholar] [CrossRef]
- Pan, I.; Das, S. Fractional order fuzzy control of hybrid power system with renewable generation using chaotic PSO. ISA Trans. 2016, 62, 19–29. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lotfy, M.E.; Senjyu, T.; Farahat, M.A.; Abdel-Gawad, A.F.; Yona, A. A Frequency Control Approach for Hybrid Power System Using Multi-Objective Optimization. Energies 2017, 10, 80. [Google Scholar] [CrossRef]
- Vachirasricirikul, S.; Ngamroo, I. Robust LFC in a smart grid with wind power penetration by coordinated V2G control and frequency controller. IEEE Trans. Smart Grid 2014, 5, 371–380. [Google Scholar] [CrossRef]
- Shankar, G.; Mukherjee, V. Load frequency control of an autonomous hybrid power system by quasi-oppositional harmony search algorithm. Int. J. Electr. Power Energy Syst. 2016, 78, 715–734. [Google Scholar] [CrossRef]
- Mi, Y.; Li, D.; Wang, C.; Loh, P. The sliding mode load frequency control for hybrid power system based on disturbance observer. Int. J. Electr. Power Energy Syst. 2016, 74, 446–452. [Google Scholar] [CrossRef]
- Pahasa, J.; Ngamroo, I. PHEVs Bidirectional charging/discharging and SoC control for mircogrid frequency stabilization using multiple MPC. IEEE Trans. Smart Grid 2015, 6, 526–533. [Google Scholar] [CrossRef]
- Yang, J.; Zeng, Z.; Tang, Y.; Yan, J.; He, H.; Wu, Y. Load frequency control in isolated micro-grids with electrical vehiclles based on multivariable generalized predictive theory. Energies 2015, 8, 2145–2164. [Google Scholar] [CrossRef]
- Khooban, M.; Niknam, T.; Blaabjerg, F.; Dragievi, T. A new load frequency control strategy for micro-grids with considering electrical vehicles. Electr. Power Syst. Res. 2017, 143, 585–598. [Google Scholar] [CrossRef]
- Chaturvedi, D.; Umrao, R.; Malik, O. Adaptive polar fuzzy logic based load frequency controller. Int. J. Electr. Power Energy Syst. 2015, 66, 154–159. [Google Scholar] [CrossRef]
- Thomsen, S.; Hoffmann, N.; Fuchs, F. PI control, PI-based state space control, and model-based predictive control for drive systems with elastically coupled loads a comparative study. IEEE Trans. Ind. Electron. 2011, 58, 3647–3657. [Google Scholar] [CrossRef]
- Mapok, K.; Zuva, T.; Masebu, H.; Zuva, K. Performance comparison of two controllers on a nonlinear system. Int. J. Chaos Control Model. Simul. 2013, 2, 17–30. [Google Scholar] [CrossRef]
- Momoh, J.; Zhang, F.; Gao, W. Optimizing renewable energy control for building using model predictive control, In Proceedings of the North American Power Symposium, Pullman, WA, USA, 7–9 September 2014; pp. 1–6. [Google Scholar]
- Wang, T.; Kamath, H.; Willard, S. Control and optimization of grid-tied photovoltaic storage systems using model predictive control. IEEE Trans. Smart Grid 2014, 5, 1010–1017. [Google Scholar] [CrossRef]
- Kouba, N.E.; Menaa, M.; Hasni, M.; Boudour, M. A New Optimal Load Frequency Control Based on Hybrid Genetic Algorithm and Particle Swarm Optimization. Int. J. Electr. Eng. Inform. 2017, 9, 418–440. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | |
|---|---|---|
| Synchronizing coefficients for tie lines for the two-area system | (pu MW) | 0.545 |
| Power system time constants in Areas 1 and 2 | = (s) | 20 |
| Turbine time constants in Areas 1 and 2 | = (s) | 0.3 |
| Governor time constants in Areas 1 and 2 | = (s) | 0.008 |
| Power system constants in Areas 1 and 2 | = (Hz/puMW) | 120; 84 |
| Regulations of governors in Areas 1 and 2 | = (Hz/pu MW) | 2.4 |
| Tie line frequency bias in Areas 1 and 2 | = (pu MW/Hz) | 0.425 |
| PID Parameters | |||
|---|---|---|---|
| GA optimized PID | 1.93 | 3.00 | 1.20 |
| PSO optimized PID | 15.0 | 15.0 | 14.1 |
| GA base | 0.019 | 0.006 | 0.007 |
| PSO base | 0.009 | 0.005 | 0.001 |
| MPC base | 0.004 | 0.002 | 0.001 |
| GA with variation , | 0.019 | 0.004 | 0.007 |
| PSO with variation , | 0.006 | 0.001 | 0.001 |
| MPC with variation , | 0.012 | 0.013 | 0.001 |
| GA with variation | 0.020 | 0.005 | 0.007 |
| PSO with variation | 0.006 | 0.002 | 0.002 |
| MPC with variation | 0.012 | 0.013 | 0.002 |
| GA with time delay | 0.019 | 0.010 | 0.009 |
| PSO with time delay | 0.018 | 0.011 | 0.001 |
| MPC with time delay | 0.018 | 0.010 | 0.001 |
| GA base | 0.11 | 0.050 | 0.022 |
| PSO base | 0.03 | 0.015 | 0.003 |
| MPC base | 0.06 | 0.045 | 0.004 |
| GA with variation , | 0.130 | 0.062 | 0.022 |
| PSO with variation , | 0.030 | 0.010 | 0.004 |
| MPC with variation , | 0.070 | 0.040 | 0.004 |
| GA with variation | 0.130 | 0.061 | 0.023 |
| PSO with variation | 0.030 | 0.011 | 0.005 |
| MPC with variation | 0.070 | 0.041 | 0.005 |
| GA with time delay | 0.110 | 0.067 | 0.026 |
| PSO with time delay | 0.030 | 0.025 | 0.005 |
| MPC with time delay | 0.080 | 0.030 | 0.005 |
| GA base | 7.00 | 8.00 | 10.00 |
| PSO base | 4.00 | 4.00 | 5.00 |
| MPC base | 3.00 | 4.00 | 5.00 |
| GA with variation , | 8.00 | 9.00 | 11.00 |
| PSO with variation , | 3.00 | 4.00 | 4.00 |
| MPC with variation , | 3.00 | 4.00 | 4.00 |
| GA with variation | 8.00 | 9.00 | 12.00 |
| PSO with variation | 3.00 | 4.00 | 6.00 |
| MPC with variation | 3.00 | 5.00 | 4.00 |
| GA with time delay | 8.00 | 8.00 | 12.00 |
| PSO with time delay | 8.00 | 8.00 | 4.00 |
| MPC with time delay | 3.00 | 3.00 | 4.00 |
| Genetic Algorithm | Particle Swarm Optimization | Model Predictive Controller |
|---|---|---|
| −101.61 + | − + | − + |
| −101.46 + | − + | − + |
| −11.10 + | − + | − − |
| −11.10 − | − − | − + |
| −6.22 + | − + | − + |
| −6.22 − | − − | − − |
| −0.3000 + | −27.00 + | |
| −0.3000 − | −0.46 + | |
| −0.99 + | −0.46 − | |
| −0.99 − | −0.55 + | |
| −3.49 + | −0.55 − |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Charles, K.; Urasaki, N.; Senjyu, T.; Elsayed Lotfy, M.; Liu, L. Robust Load Frequency Control Schemes in Power System Using Optimized PID and Model Predictive Controllers. Energies 2018, 11, 3070. https://doi.org/10.3390/en11113070
Charles K, Urasaki N, Senjyu T, Elsayed Lotfy M, Liu L. Robust Load Frequency Control Schemes in Power System Using Optimized PID and Model Predictive Controllers. Energies. 2018; 11(11):3070. https://doi.org/10.3390/en11113070
Chicago/Turabian StyleCharles, Komboigo, Naomitsu Urasaki, Tomonobu Senjyu, Mohammed Elsayed Lotfy, and Lei Liu. 2018. "Robust Load Frequency Control Schemes in Power System Using Optimized PID and Model Predictive Controllers" Energies 11, no. 11: 3070. https://doi.org/10.3390/en11113070