Micro Sensor Node for Air Pollutant Monitoring: Hardware and Software Issues

Abstract
:
1. Introduction
2. Related Work
3. Design Goals
3.1. Air Pollution Monitoring for EPA-specified Criteria Pollutants
3.2. Flexibility and Energy Management
4. Hardware Design
4.1. GAS Sensors
4.2. Sensor Board
5. Software Issues
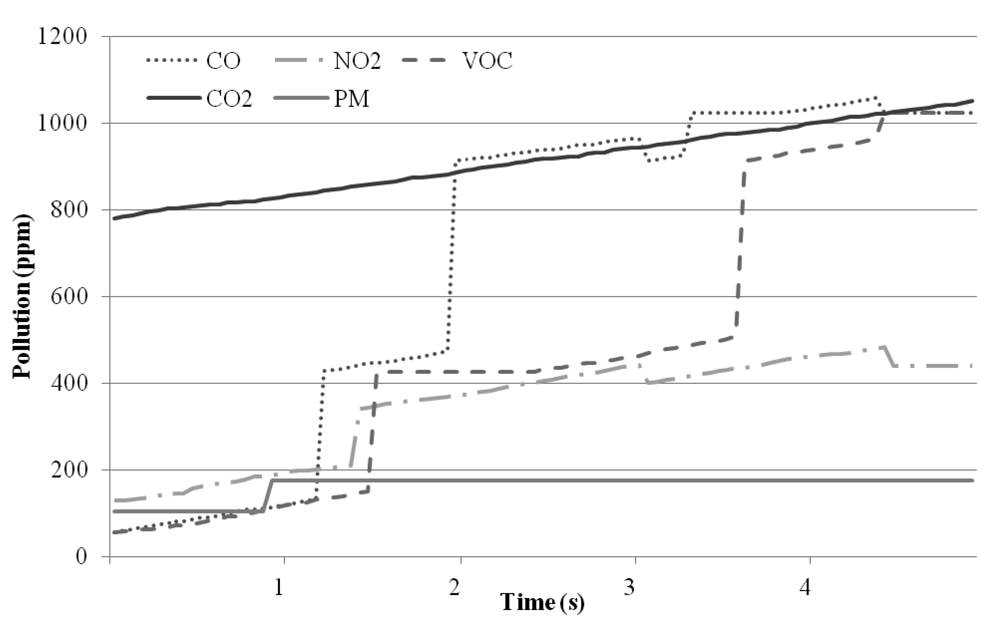
5.1. Reading the Sensors
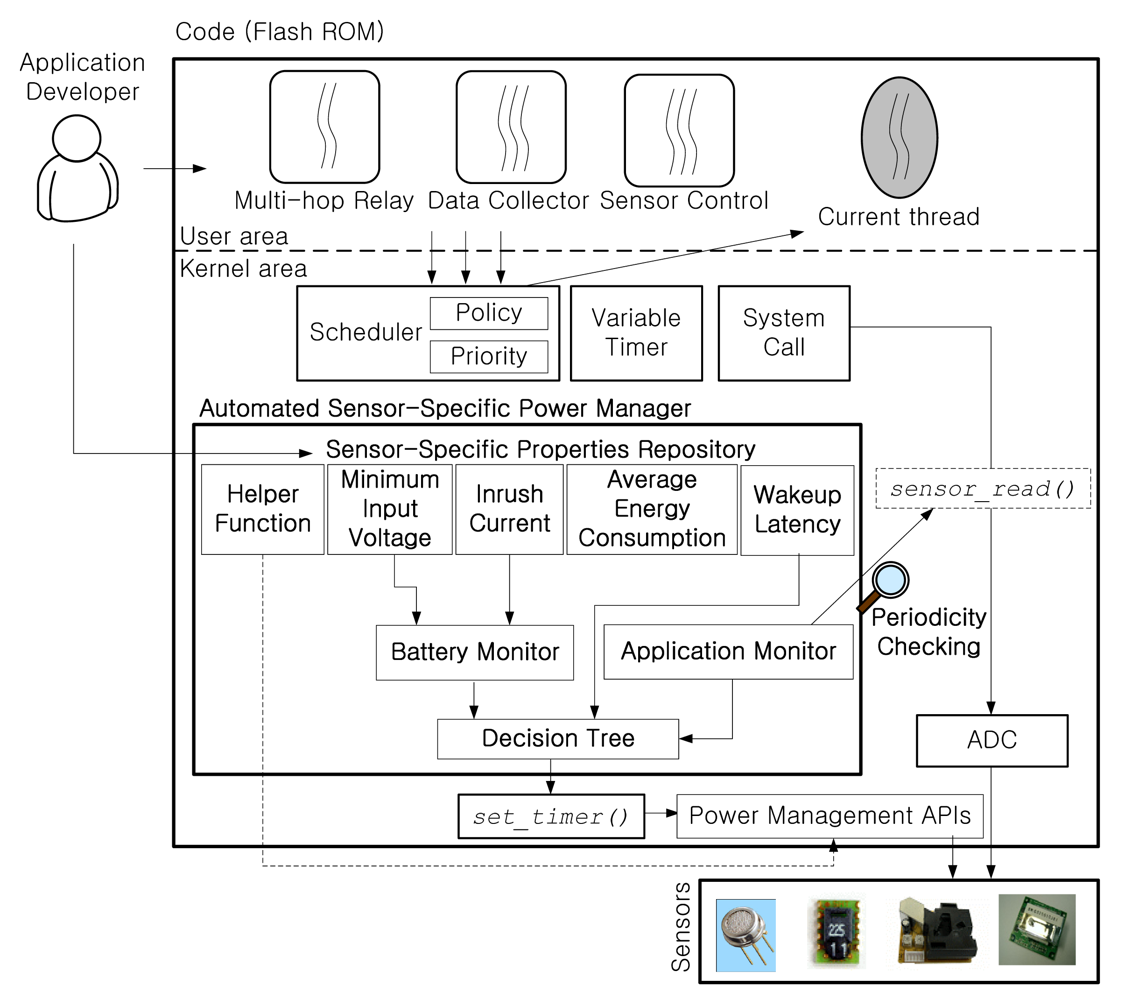
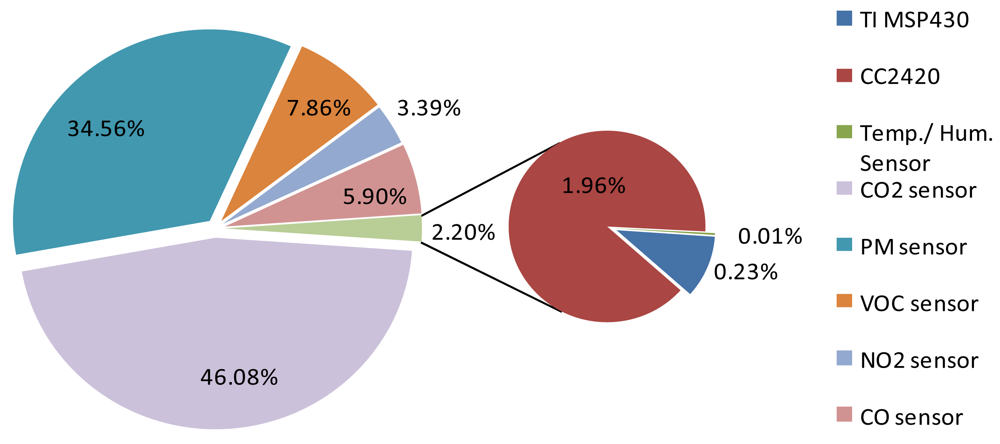
5.2. Power Management for Sensor Node
6. Implementation
7. Experiments
7.1. Experimental Setup
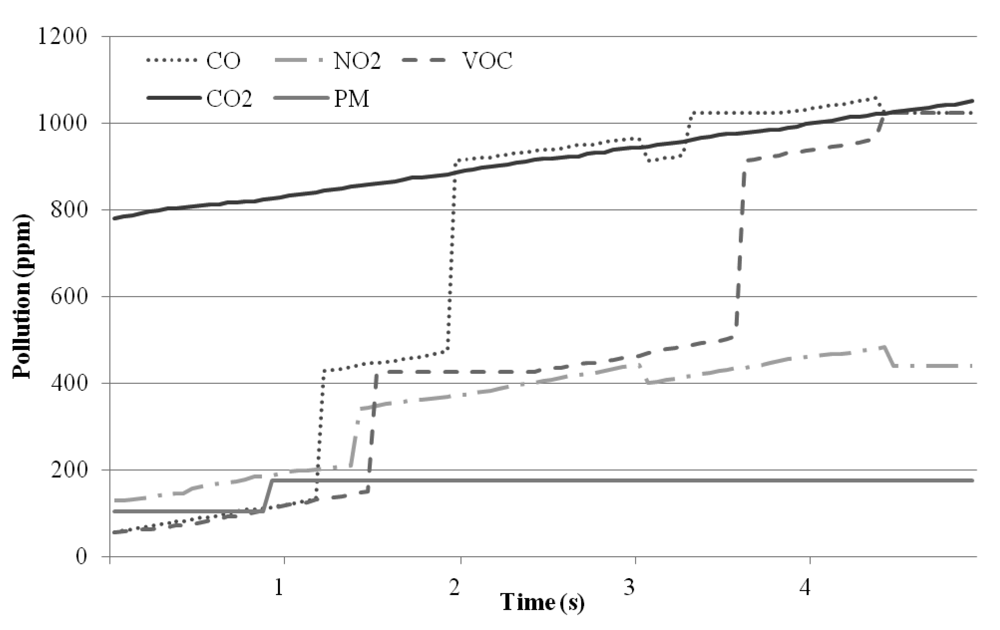
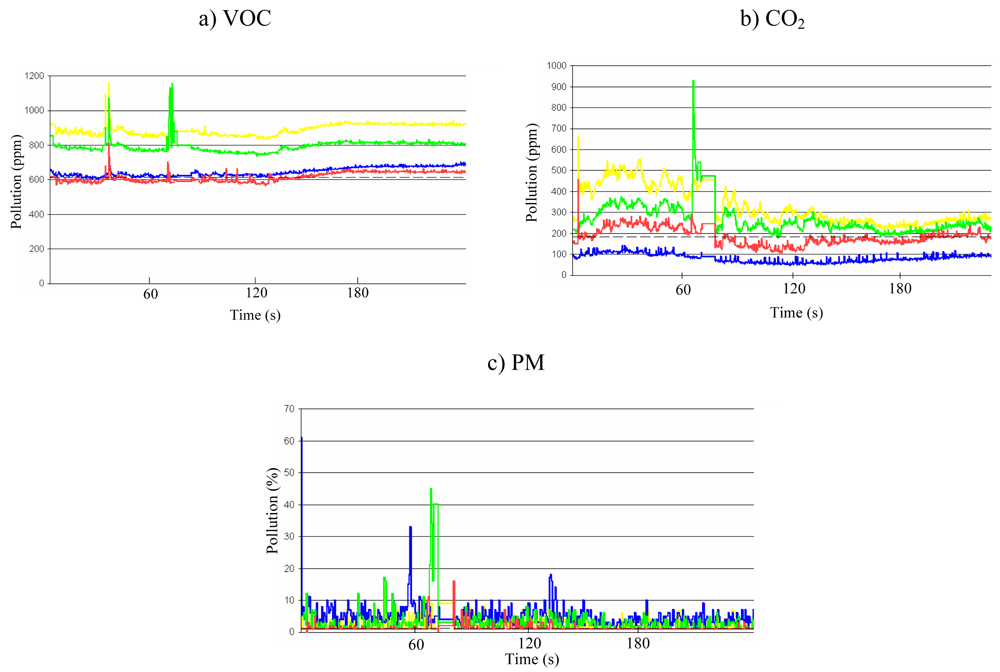
7.2. Sensor Validation
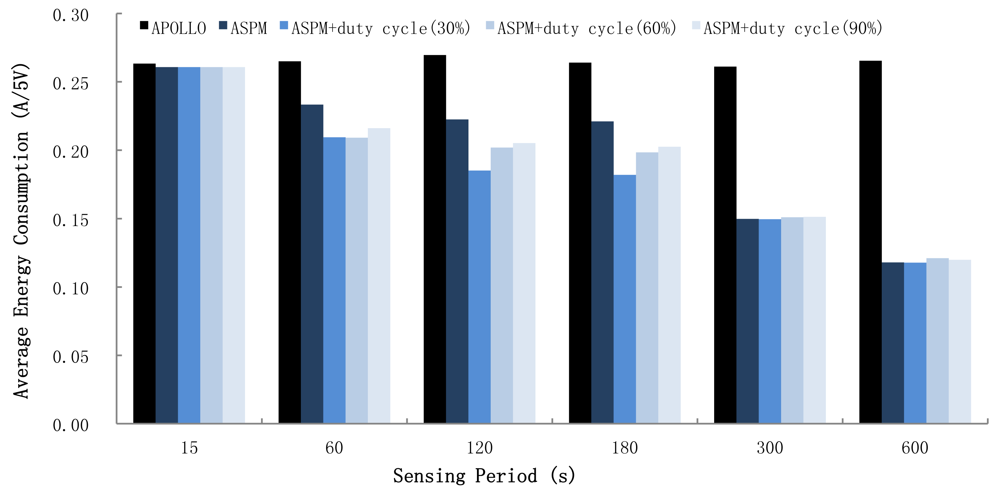
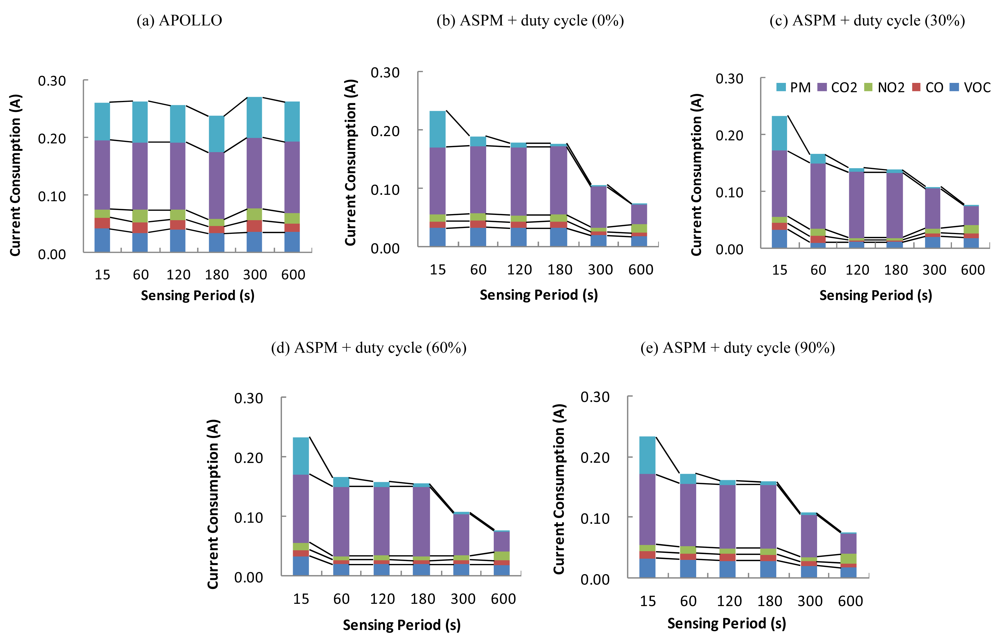
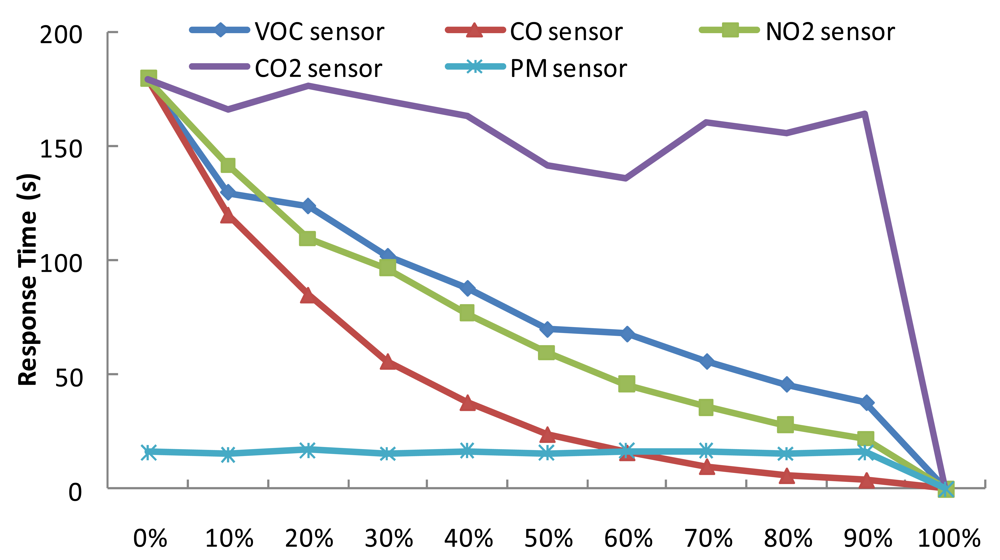
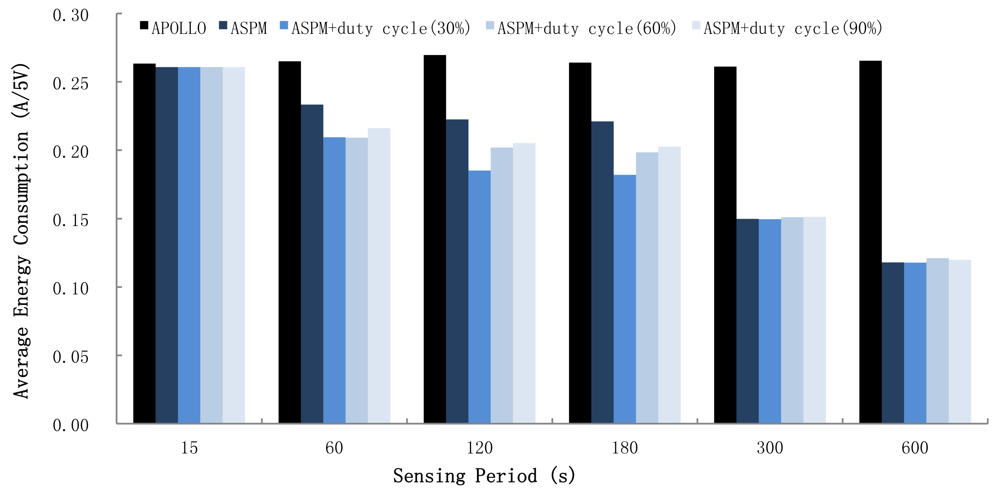
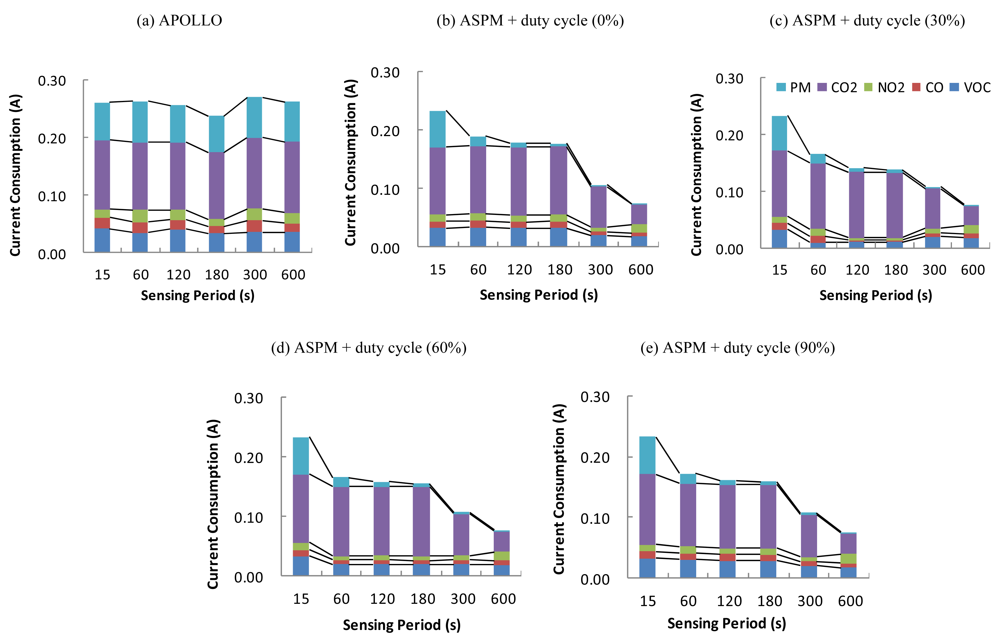
7.3. Energy Management
8. Conclusions
Acknowledgments
References and Notes
- U.S. Environmental Protection Agency. Air Pollution Monitoring. Available online: http://www.epa.gov/oar/oaqps/montring.html (accessed on September 28, 2009).
- Synergist Buyer's Guide. Indoor Air Quality. Available online: http://www.aiha.org/thesynergist/html/bg/iaq.htm (accessed on September 28, 2009).
- Bapat, S.; Kulathumani, V.; Arora, A. Analyzing the YIELD of ExScal, a Large-Scale Wireless Sensor Network Experiment. Proceedings of the 13th IEEE International Conference on Network Protocols, Princeton, NJ, USA; IEEE Computer Society: Boston, MA, USA, 2005. [Google Scholar]
- Tolle, G.; Polastre, J.; Szewczyk, R.; Culler, D.; Turner, N.; Tu, K.; Burgess, S.; Dawson, T.; Buonadonna, P.; Gay, D.; Hong, W. A Macroscope in the Redwoods. Proceedings of the 3rd International Conference on Embedded Networked Sensor Systems, San Diego, CA, USA; ACM: San Diego, CA, USA, 2005. [Google Scholar]
- Farrar, C.R. An introduction to structural health monitoring. Phil. Trans. 2007, 365, 303–315. [Google Scholar]
- Microchemical Systems. Semiconductor Gas Sensors. Available online: http://www.microchemical.com/technology.htm (accessed on September 28, 2009).
- Barrenetxea, G.; Ingelrest, F.; Schaefer, G.; Vetterli, M.; Couach, O.; Parlange, M. SensorScope: Out-of-the-Box Environmental Monitoring. Proceedings of the 7th International Conference on Information Processing in Sensor Networks, St. Louis, MO, USA; IEEE Computer Society: St. Louis, MO, USA, 2008. [Google Scholar]
- Murty, R.N.; Mainland, G.; Rose, I.; Chowdhury, A.R.; Gosain, A.; Bers, J.; Welsh, M. CitySense: An Urban-Scale Wireless Sensor Network and Testbed. Proceedings of the 8th IEEE Conference on Technologies for Homeland Security, Waltham, MA, USA; IEEE Computer Society: Waltham, MA, USA, 2008. [Google Scholar]
- Honicky, R.; Brewer, E.A.; Paulos, E.; White, R. N-smarts: networked suite of mobile atmospheric real-time sensors. Proceedings of the 2nd ACM SIGCOMM Workshop on Networked Systems for Developing Regions, Seattle, WA, USA; ACM: Seattle, WA, USA, 2008. [Google Scholar]
- Volgyesi, P.; Nadas, A.; Koutsoukos, X.; Ledeczi, A. Air Quality Monitoring with SensorMap. Proceedings of the 7th International Conference on Information Processing in Sensor Networks, St. Louis, MO, USA; IEEE Computer Society: St. Louis, MO, USA, 2008. [Google Scholar]
- So, S.; Koushanfar, F.; Kosterev, A.; Tittel, F. LaserSPECks: laser SPECtroscopic trace-gas sensor networks - sensor integration and applications. Proceedings of the 6th International Conference on Information Processing in Sensor Networks, Cambridge, MA, USA; IEEE Computer Society: Cambridge, MA, USA, 2007. [Google Scholar]
- Kim, N.; Choi, S.; Cha, H. Automated sensor-specific power management for wireless sensor networks. Proceedings of the 5th IEEE International Conference on Mobile Ad Hoc and Sensor Systems, Atlanta, GA, USA; IEEE Computer Society: Atlanta, GA, USA, 2008. [Google Scholar]
- Hybus Co. Ltd. Hmote System. Available online: http://www.hybus.net/lan_english/index.htm (accessed on September 28, 2009).
- Texas Instruments Co. Ltd. CC2420 Datasheet. Available online: http://focus.ti.com/docs/prod/folders/print/cc2420.html (accessed on September 28, 2009).
- Tsujita, W.; Ishida, H.; Moriizumi, T. Dynamic gas sensor network for air pollution monitoring and its auto-calibration. IEEE Sens. 2004, 51, 56–59. [Google Scholar]
- Sharma, A.; Golubchik, L.; Govindan, R. On the Prevalence of Sensor Faults in Real-World Deployments. 4th Annual IEEE Communications Society Conference on Sensor, Mesh and Ad Hoc Communications and Networks, San Diego, CA, USA; IEEE Computer Society: San Diego, CA, USA, 2007. [Google Scholar]
- Donghai, M.; Hollerbach, J.M. Identifying mass parameters for gravity compensation and automatic torque sensor calibration. Proceedings of the 13th IEEE International Conference on Robotics and Automation, Portland, OR, USA; IEEE Computer Society: Minneapolis, MN, USA, 1996. [Google Scholar]
- Whitehouse, K.; Culler, D. Calibration as parameter estimation in sensor networks. Proceedings of the 1st ACM International Workshop on Wireless Sensor Networks and Applications, Atlanta, GA, USA; ACM: Atlanta, GA, USA, 2002. [Google Scholar]
- Cha, H.; Choi, S.; Jung, I.; Kim, H.; Shin, H.; Yoo, J.; Yoon, C. RETOS: resilient, expandable, and threaded operating system for wireless sensor networks. Proceedings of the 6th International Conference on Information Processing in Sensor Networks, Cambridge, MA, USA; ACM: Cambridge, MA, USA, 2007. [Google Scholar]
- Oh, H.; Bahn, H.; Chae, K. An energy-efficient sensor routing scheme for home automation networks. IEEE Trans. Consum. Electron. 2005, 51, 836–839. [Google Scholar]
- Rodgman, A; Perfetti, T.A. The Chemical Components of Tobacco and Tobacco Smoke; CRC Press: New York, NY, USA, 2008; pp. 893–906. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Sources | Effects |
|---|---|---|
| CO | gas heaters, leaking chimneys and furnaces, woodstoves, fireplaces, gas stoves | impaired vision and coordination, headaches, dizziness, confusion, nausea |
| NO2 | kerosene heaters, unvented gas stoves, heaters, tobacco smoke | eye, nose, and throat irritation, impaired lung function, increased respiratory infections |
| PM | fireplaces, tobacco smoke, woodstoves, kerosene heaters | eye, nose, and throat irritation, bronchitis, lung cancer |
| CO2 | gas heaters, tobacco smoke, woodstoves, fireplaces, gas stoves, automotive products | stimulation of the respiratory centre, dizziness, confusion, headaches, shortness of breath |
| VOC | paints, paint strippers, aerosol sprays, air fresheners, stored fuels, automotive products, dry-cleaned clothing | eye, nose, and throat irritation, headaches, loss of coordination, nausea, damage to the liver, kidneys, and central nervous system |
| Sensor | Product | Company | Size (mm) | Range | Accuracy | Power | Type |
|---|---|---|---|---|---|---|---|
| CO | MiCS-5521 | Micro-Chemical Systems | 9.5 × 9.5 × 3.9 | 10 – 1,000 ppm | - | 35 mA/3 V | Heating semiconductor |
| NO2 | MiCS-2710 | Micro-Chemical Systems | 9.5 × 9.5 × 3.9 | 0.05 – 5 ppm | - | 20 mA/3 V | Heating semiconductor |
| VOC | MiCS-5135 | Micro-Chemical Systems | 9.5 × 9.5 × 3.9 | 10 – 1,000 ppm | - | 24 mA/3 V | Heating semiconductor |
| PM | PPD4NS | SHINYEI | 69 × 46 × 22 | 8,000/28 Mℓ | 1 μm | 90 mA/5 V | LED |
| CO2 | D-120 | - | 55 × 51 × 25 | 0 – 2,000 ppm | ±5.0% | 50 mA/12 V | NDIR |
| Temperature | SHT11 | Sensirion | 4.88 × 7.24 × 2.5 | -40 – 123.8 °C | ±0.4 @25 °C | 4 mA/3 V | CMOSens |
| Category | Wake-up Latency (s) | Break-even Cycle (Hz) |
|---|---|---|
| Temp/Hum | 0.015 | N/A |
| CO | About 180 | About 0.005 |
| NO2 | About 180 | About 0.005 |
| VOC | About 180 | About 0.005 |
| CO2 | About 480 | About 0.027 |
| PM | About 360 | About 0.015 |
© 2009 by the authors; licensee Molecular Diversity Preservation International, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Choi, S.; Kim, N.; Cha, H.; Ha, R. Micro Sensor Node for Air Pollutant Monitoring: Hardware and Software Issues. Sensors 2009, 9, 7970-7987. https://doi.org/10.3390/s91007970
Choi S, Kim N, Cha H, Ha R. Micro Sensor Node for Air Pollutant Monitoring: Hardware and Software Issues. Sensors. 2009; 9(10):7970-7987. https://doi.org/10.3390/s91007970
Chicago/Turabian StyleChoi, Sukwon, Nakyoung Kim, Hojung Cha, and Rhan Ha. 2009. "Micro Sensor Node for Air Pollutant Monitoring: Hardware and Software Issues" Sensors 9, no. 10: 7970-7987. https://doi.org/10.3390/s91007970