Micrometer Backstepping Control System for Linear Motion Single Axis Robot Machine Drive


Department of Electrical Engineering, National United University, 36063 Miaoli, Taiwan
*
Author to whom correspondence should be addressed.
Sensors 2019, 19(16), 3616; https://doi.org/10.3390/s19163616
Submission received: 20 July 2019
/
Revised: 13 August 2019
/
Accepted: 16 August 2019
/
Published: 20 August 2019
(This article belongs to the Special Issue Sensors and Robot Control)
Abstract
:In order to cut down influence on the uncertainty disturbances of a linear motion single axis robot machine, such as the external load force, the cogging force, the column friction force, the Stribeck force, and the parameters variations, the micrometer backstepping control system, using an amended recurrent Gottlieb polynomials neural network and altered ant colony optimization (AACO) with the compensated controller, is put forward for a linear motion single axis robot machine drive system mounted on the linear-optical ruler with 1 um resolution. To achieve high-precision control performance, an adaptive law of the amended recurrent Gottlieb polynomials neural network based on the Lyapunov function is proposed to estimate the lumped uncertainty. Besides this, a novel error-estimated law of the compensated controller is also proposed to compensate for the estimated error between the lumped uncertainty and the amended recurrent Gottlieb polynomials neural network with the adaptive law. Meanwhile, the AACO is used to regulate two variable learning rates in the weights of the amended recurrent Gottlieb polynomials neural network to speed up the convergent speed. The main contributions of this paper are: (1) The digital signal processor (DSP)-based current-regulation pulse width modulation (PWM) control scheme being successfully applied to control the linear motion single axis robot machine drive system; (2) the micrometer backstepping control system using an amended recurrent Gottlieb polynomials neural network with the compensated controller being successfully derived according to the Lyapunov function to diminish the lumped uncertainty effect; (3) achieving high-precision control performance, where an adaptive law of the amended recurrent Gottlieb polynomials neural network based on the Lyapunov function is successfully applied to estimate the lumped uncertainty; (4) a novel error-estimated law of the compensated controller being successfully used to compensate for the estimated error; and (5) the AACO being successfully used to regulate two variable learning rates in the weights of the amended recurrent Gottlieb polynomials neural network to speed up the convergent speed. Finally, the effectiveness of the proposed control scheme is also verified by the experimental results.
1. Introduction
A linear motion single axis robot machine that can achieve rapid rates of acceleration by use of electromagnetic force has few features which are of merit [1,2,3], such as being simple fabric, having no adverse reaction, little friction, elated velocity, elated pushed force, and elated precision in a long-distance location and so on. A linear motion single axis robot machine consists of some of magnets that create constant magnetic fields, and some windings that create the traveling magnetic fields. A number of applications of the linear motion single axis robot machine include checking the camera moving unit, ink jet printer, chip mounter, checking the device, a high-speed screw-tightening unit, a high-speed loading/unloading robot, and material handling systems [1,2,3].
One of the control methods for the large state feedback linearizable systems include the backstepping techniques [3,4,5]. The design of tracking and adjustment strategies can provide a systematic skeleton. Moreover, to extend to the estimation of unknown parameters of the system, the adaptive backstepping methods [6,7] were put forward to estimate some unknown parameters of the system. Furthermore, some adaptive backstepping controllers were used for some linear machines [8,9] to estimate uncertainty. In addition, some neural networks [10,11,12] have been used for the nonlinear systems to estimate unknown parameters for uncertainty. Therefore, the adaptive backstepping controllers, combined with some neural networks [13,14,15] are generally applied to control the nonlinear systems so as to estimate some uncertainties and enhance system robustness. However, these methods are only limited to the bounded region, and have never showed any compensated mechanics or technology. Thus, the motivation of the proposed micrometer backstepping control system, by means of the amended recurrent Gottlieb polynomials neural network and AACO with the compensated controller for a linear motion single axis robot machine mounted with a linear optical-ruler sensor with 1 um precision and three Hall sensors, provides an estimated method and error compensation mechanism which can be used to enhance the robustness of the system under parameter variations and external force disturbances to raise the control precision.
Due to lesser computational complexity and faster convergent speed, the polynomials-function neural networks [16,17] have recently been proposed to reduce computational costs, while some parts of the polynomials-function neural networks were used to estimate some unknown parameters or the lumped uncertainty. Owing to uncertain actions, the control performance of the linear motion single axis robot machine drive can have a serious influence. The micrometer backstepping control system using an amended recurrent Gottlieb polynomials neural network [18,19,20] and altered ant colony optimization (AACO) [21,22] with the compensated controller has thus been put forward to control the motion position of the linear motion single axis robot machine to track periodic references.
This paper presents the micrometer backstepping control system using an amended recurrent Gottlieb polynomials neural network and AACO with the compensated controller, which has an error estimated law with an adaptive law, to control the linear motion single axis robot machine drive system so as to enhance the robustness of the system under the parameter variations and the external load force disturbances. The amended recurrent Gottlieb polynomials neural network with an adaptive law is too proposed to adapt the value of the lumped uncertainty. Besides, the compensated controller with an adaptive law by use of the novel error estimated law is also proposed to compensate for the estimated error between the lumped uncertainty and the amended recurrent Gottlieb polynomials neural network. Moreover, the AACO is used to regulate two variable learning rates in the weights of the amended recurrent Gottlieb polynomials neural network to speed up the convergent speed. The important contributions of this paper are: (1) The digital signal processor (DSP)-based current-regulation pulse width modulation (PWM) control scheme being successfully applied to control the linear motion single axis robot machine drive system; (2) the micrometer backstepping control system using an amended recurrent Gottlieb polynomials neural network with the compensated controller being successfully derived according to the Lyapunov function to diminish the lumped uncertainty effect; (3) achieving high-precision control performance, where an adaptive law of the amended recurrent Gottlieb polynomials neural network based on the Lyapunov function is successfully applied to estimate the lumped uncertainty; (4) a novel error-estimated law of the compensated controller being successfully used to compensate for the estimated error; and (5) the AACO being successfully used to regulate two variable learning rates in the weights of the amended recurrent Gottlieb polynomials neural network to speed up the convergent speed. Finally, the effectiveness of the proposed control scheme is also verified by the experimental results.
2. Materials and Methods
2.1. Model of Linear Motion Single Axis Robot Machine
The d-q axis model of the linear motion single axis robot machine by use of a synchronous rotating reference frame can be described as follows [3]:
where are the d-axis and q-axis voltages; are the d-axis and q-axis currents; is the phase winding resistance; are the d-axis and q-axis inductances; is the electrical angular velocity; is the angular velocity of the mover; and is the permanent magnet flux linkage. Besides,
where is the number of pole pairs; is the linear velocity; is the pole pitch; is the electrical linear velocity; and is the electrical frequency. The electromagnet-pushed force [3] is given by
Then, the electromagnetic-pushed power [1,2,3] is given by
and the dynamic equation of the mover in the linear motion single axis robot machine drive system is given by
where is the electromagnet-pushed force; is the total mass of the moving element system; is the viscous friction; is the external load-pushed force which satisfies the condition ; is the Stribeck effect force; is the coulomb friction force; and is the cogging force from the slotting and the finite length of the iron-cored stator.
2.2. Drive System of Linear Motion Single Axis Robot Machine
The linear motion single axis robot machine is made up of a linear motor and a linear slider. A linear motor-driven linear slider module is equipped with a stainless-steel cover strip to prevent particles from entering or exiting. The basic control approach of the linear motion single axis robot machine drive system adopted the field orientation [1,2,3]. For the field-oriented control, the rotor flux is produced by the d-axis only, while the current vector is generated by the q-axis. When is equal to zero and the flux linkage is a fixed value, then the electromagnet-pushed force is proportional to from (5) and (6). The electromagnetic force is linearly proportional to the q-axis current when the d-axis flux is constant in (5), where the maximum force per ampere can be achieved. The electromagnet-pushed force equation from (5) can be rewritten by [3],
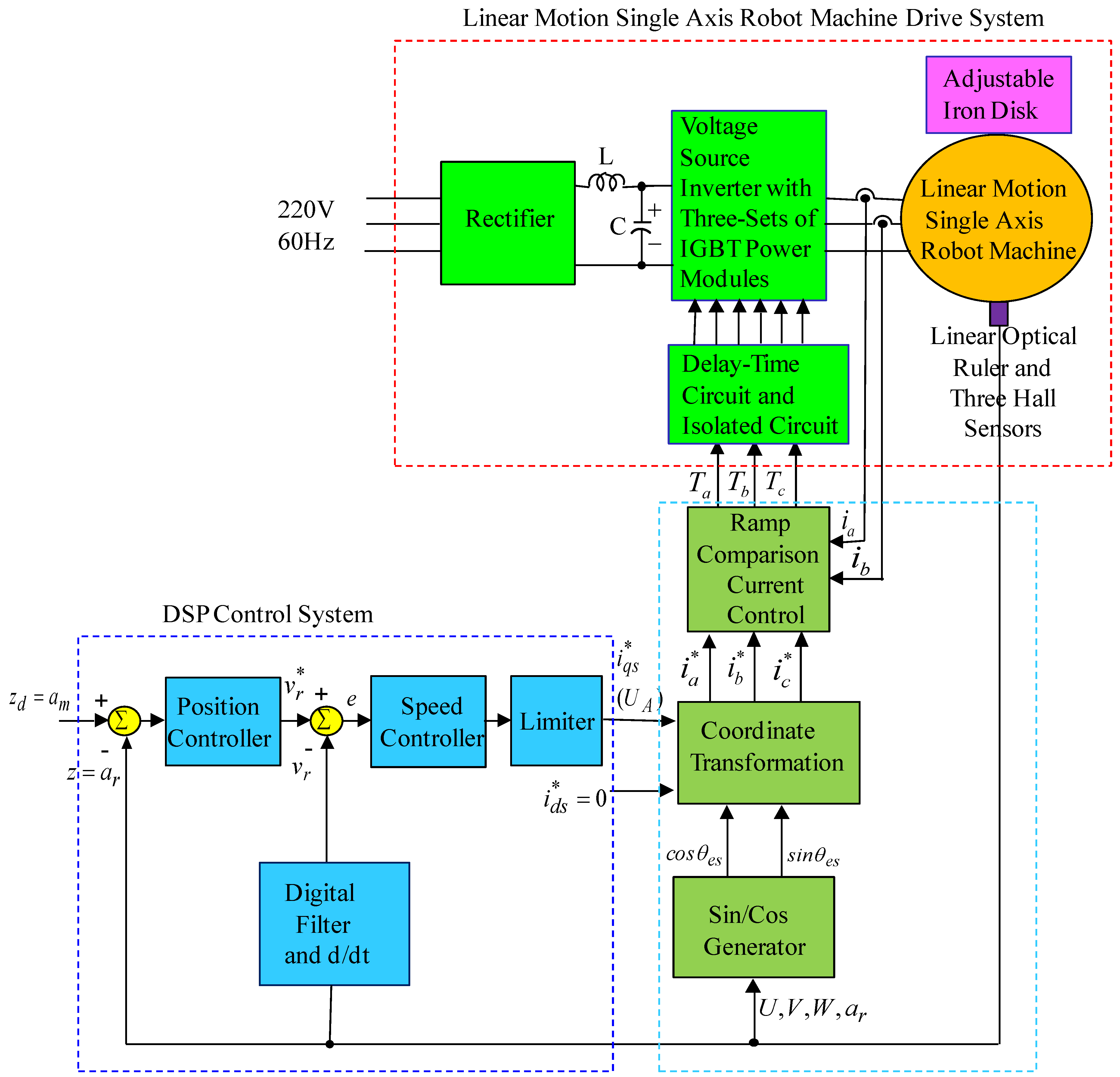
where is the electromagnetic-pushed force coefficient, and is the command of the electromagnetic-pushed force current. The makeup of a field-oriented linear motion single axis robot machine drive system is shown in Figure 1. The linear motion single axis robot machine drive system incorporates a linear motion single axis robot machine, a ramp comparison current-controlled pulse width modulation (PWM) voltage source inverter (VSI), a field-orientation mechanism, a coordinate translator, a speed control loop, a position control loop, a linear-optical ruler, and three Hall sensors [3]. The detection of the motion position was used by a linear-optical ruler with 1 um resolution. The detection of the permanent magnet (PM) position was used by three Hall sensors with three signals as U, V, and W. The output signals of three Hall sensors, which consist of the Hall elements and the associated electronics elements, are the rectangular analog signals [3]. Some different sizes of iron disks were used to change the mass of the mover and viscous friction of the motion mover of the linear motion single axis robot machine.
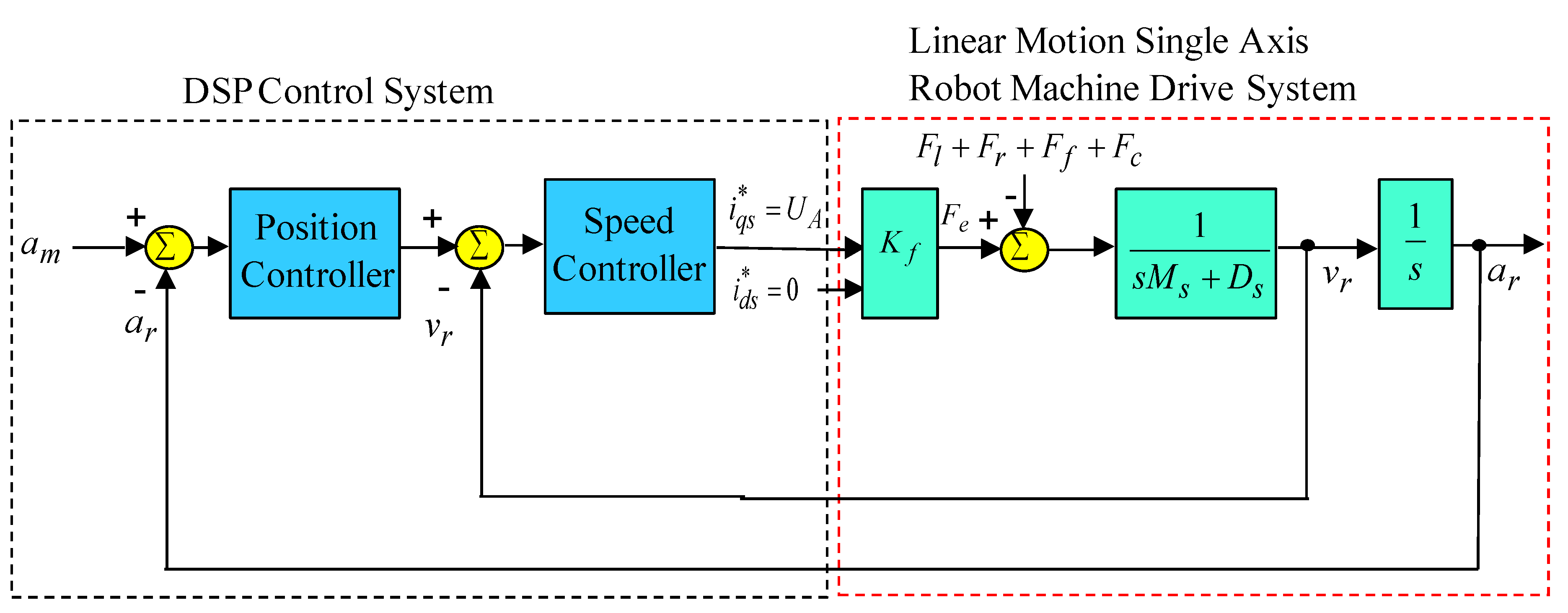
The digital signal processor (DSP) control system by TMS32C32 chip was used to execute the field-oriented control. With the implementation of field-oriented control [1,2,3], the simplified block diagram of the linear motion single axis robot machine drive system is shown in Figure 2. The specifications of the linear motion single axis robot machine are given as 220 V, 3.1 A, 0.6 kW, 50.8 N, with 0.1 m distance, 0.02 m width. For the convenience of the controller design, the speed and position signals were set at 1 V = 200 µm/s and 1 V = 200 µm. The electrical parameters of the linear motor of the linear motion single axis robot machine are given as , , .
2.3. Micrometer Backstepping Control System Using an Amended Recurrent Gottlieb Polynomials Neural Network and AACO with the Compensated Controller
By using (7) and (8), the dynamic equation for the linear motion single axis robot machine drive, including the external load force, the cogging force, the column friction force, the Stribeck effect force, and the parameters’ variations can be represented as:
where is the motion position of the linear motion single axis robot machine, is the motion velocity of the linear motion single axis robot machine, and , and are three real numbers. is the lumped uncertainty that includes the external load force, the cogging force, the column friction force, the Stribeck effect force, and the parameters’ variations. is the control intensity of the linear motion single axis robot machine drive system—that is, the command of electromagnetic-pushed force current.
The tracking error of the motion position is defined by:
Differential (10) is:
The stabilizing function is defined by:
where and are two real numbers greater than zero, and is the integral function [3]. The virtual tracking error of motion position is defined by
By use of (9) and (13), the differential of (13) is given by
The control objective is to track the reference trajectory asymptotically. In advance for practical applications, the lumped uncertainty is difficult to know. Because the lumped uncertainty is difficult to measure in practical applications, and the upper bound is difficult to know, an amended recurrent Gottlieb polynomials neural network uncertainty observer has been proposed to adapt the value of the lumped uncertainty,. In consequence, the micrometer backstepping control system using an amended recurrent Gottlieb polynomials neural network and AACO with the compensated controller, which is shown in Figure 3, is proposed for tracking of the reference trajectory under the lumped uncertainty , assuming that , , and are all bounded functions. Additionally, the estimation of the rehabilitated error is compensated for by the controller with an adaptive law to compensate for the observed error that is based on the Lyapunov function to further guarantee the stable characteristic of the whole control system. Furthermore, in order to train the amended recurrent Gottlieb polynomials neural network effectively, an online parameter training methodology and the updated law was derived by means of the Lyapunov stability theorem and the gradient descent method. In order to raise convergent speed, the AACO was used to regulate two variable learning rates in the weights of the amended recurrent Gottlieb polynomials neural network.
The makeup of the proposed three-layer amended recurrent Gottlieb polynomials neural network, which is made up of the input layer, the hidden layer, and the output layer, is shown in Figure 4.
All signal actions in every node of the three layers can be described as follows:
where N denotes the number of iterations. and are the multiplication operator and the summation operator, respectively. and are the tracking error and the tracking error increment, respectively. and are the recurrent weight from the output layer to the input layer and the connective weight from the hidden layer to the output layer, respectively. , , and are the output value from the input layer, the output value from the hidden layer, and the output value from the output layer, respectively. is the self-feedback gain of the hidden layer. For the Gottlieb polynomials [18,19,20], is the argument of the polynomials with , and n is the order of expansion. The zero-, first-, and second-order Gottlieb polynomials are given by , , and , respectively. The higher-order Gottlieb polynomials may be generated by Gottlieb [18,19,20]. Two activation functions and were adopted in the linear functions.
The output value of the amended recurrent Gottlieb polynomials neural network can be denoted by:
where is the collections of the adjustable parameters of the amended recurrent Gottlieb polynomials neural network, and represents the jth input to the node of the output layer, and , in which is determined by the selected Gottlieb polynomials and .
The minimum rehabilitated error is defined by:
where is the minimum rehabilitated error, and the absolute value of is less than a small positive constant . That is, ; is the best weight vector that can achieve the minimum rehabilitated error. To develop the adaptive law of the amended recurrent Gottlieb polynomials neural network and error-estimated law, the Lyapunov function is given by
where and are positive real numbers. Define the estimated error by
where is the estimation value of . By use of (11), (12), (13), (14), and , the derivative of the (20) can be written by
Then, from (22), the control strength of the micrometer backstepping control using the amended recurrent Gottlieb polynomials neural network and AACO with the compensated controller is designed by
Substituting (23) into (22), the following equation can be obtained by
In order to make , the adaptive law for , the compensated controller with error-estimated laws, and the adaptive law of the estimated error are designed as:
Substitute (21), (25), (26), and (27) into (24). Then, (24) can be rewritten by
Define the following term:
Then,
Because is nonincreasing and bounded, and is bounded, then is bounded and is uniformly continuous [23,24]; thus, and by using Barbalat’s lemma [23,24]. Moreover, and will converge to zero as ; then will converge to and will converge to as . In consequence, the stability of the micrometer backstepping control system using an amended recurrent Gottlieb polynomials neural network and AACO with the compensated controller can be guaranteed. Additionally, to improve the discontinuous effect of the compensated controller, a smooth approximation of the sign function for can be represented by
A cost function that describes the online training algorithm of the amended recurrent Gottlieb polynomials neural network is defined by [25,26]:
By exploiting the gradient descent method, the adaptive law of the connective weight is given by
The above Jacobian term of the controlled system can be rewritten as . The recurrent weight from the Jacobian term of the controlled system is given by
To improve convergence, the altered ant colony optimization (AACO) is proposed for adjusting two learning rates to obtain two optimal learning rates of the weights in the amended recurrent Gottlieb polynomials neural network. In the basic ant colony optimization (ACO) algorithm [21,22], the pheromone updated values and the probabilistic choice of solution are two important parameters. In the pheromone updated values, the evaporation rate and the length of the best tour are two important factors. In order to improve the pheromone updated rule, the AACO algorithm is proposed and works as follows.
First, the probabilistic choice of answer [21,22] is defined by:
where is the available neighborship that is designated the present fractional answer, ; is the heuristic magnitude regarding the part ; is the pheromone magnitude regarding the part ; can determine magnitude of the pheromone message that belongs to the real number parameter with greater than zero. can determine the magnitude of the heuristic message that belongs to a real number parameter greater than zero. The ants put in the answer regarding part to their fractional answer by shifting from zenith i to zenith j, then the ants could attain their ending zenith and finish their entrant answers. The pheromones are preliminarily equal to all zeniths, and design a small magnitude greater than zero. In each tentative, all ants establish their answers until they have either attained the target situation, or the trial outrides some pre-determined limits. Secondly, the renewed rule of the pheromone is as below:
where is the set of total contender answers originated in the tentative. is the evaporation rate in connection with the pheromone magnitude regarding the learning rate . The magnitude of responds to the number of pheromones in the ant k retained on the zeniths that the ant k has inquired. Thirdly, the variation magnitude is denoted as below:
where is the step count at the ant k needed to attain the target situation; is the sampling time using seconds; and is the maximum value of steps affirmed by a tentative. The magnitude of is available for making the number of pheromones deposit to be closed equal to when the ant attains the target in exactly one step. The second term in (37) confirms that the pheromones are not renewed when the tentative is ended at the maximum value of time steps and the ant has not yet attained the target. It makes sure that the whole number of pheromones deposited is maximized if all ants search for the shortest route.
In a word, based on two adaptive laws, (33) and (34), for the connective weight adjustment and the recurrent weight adjustment with two optimal learning rates , the online tuning algorithms of the amended recurrent Gottlieb polynomials neural network are derived. Moreover, the weight estimation errors of the amended recurrent Gottlieb polynomials neural network are fundamentally bounded [27]. The weight estimation errors of the amended recurrent Gottlieb polynomials neural network are bounded, which are required to ensure that the control signal is bounded.
Remark 1.
The key point of the proposed design is to utilize the Lyapunov function for constructing the novel micrometer backstepping control system using an amended recurrent Gottlieb polynomials neural network and AACO with the compensated controller in (23), which reduces the input dimensions of the amended recurrent Gottlieb polynomials neural network controller.
Remark 2.
The amended recurrent Gottlieb polynomials neural network approximation holds only in a compact set. Thus, the obtained result is semi-global, in the sense that they hold for the compact sets, and there exists a controller with a sufficiently large number of amended recurrent Gottlieb polynomials neural network nodes, such that all the closed-loop signals are bounded.
3. Results
The block diagram of the linear motion single axis robot machine drive system by use of the DSP control system is presented in Figure 1. An experimental set-up picture of the linear motion single axis robot machine drive system is shown in Figure 5.
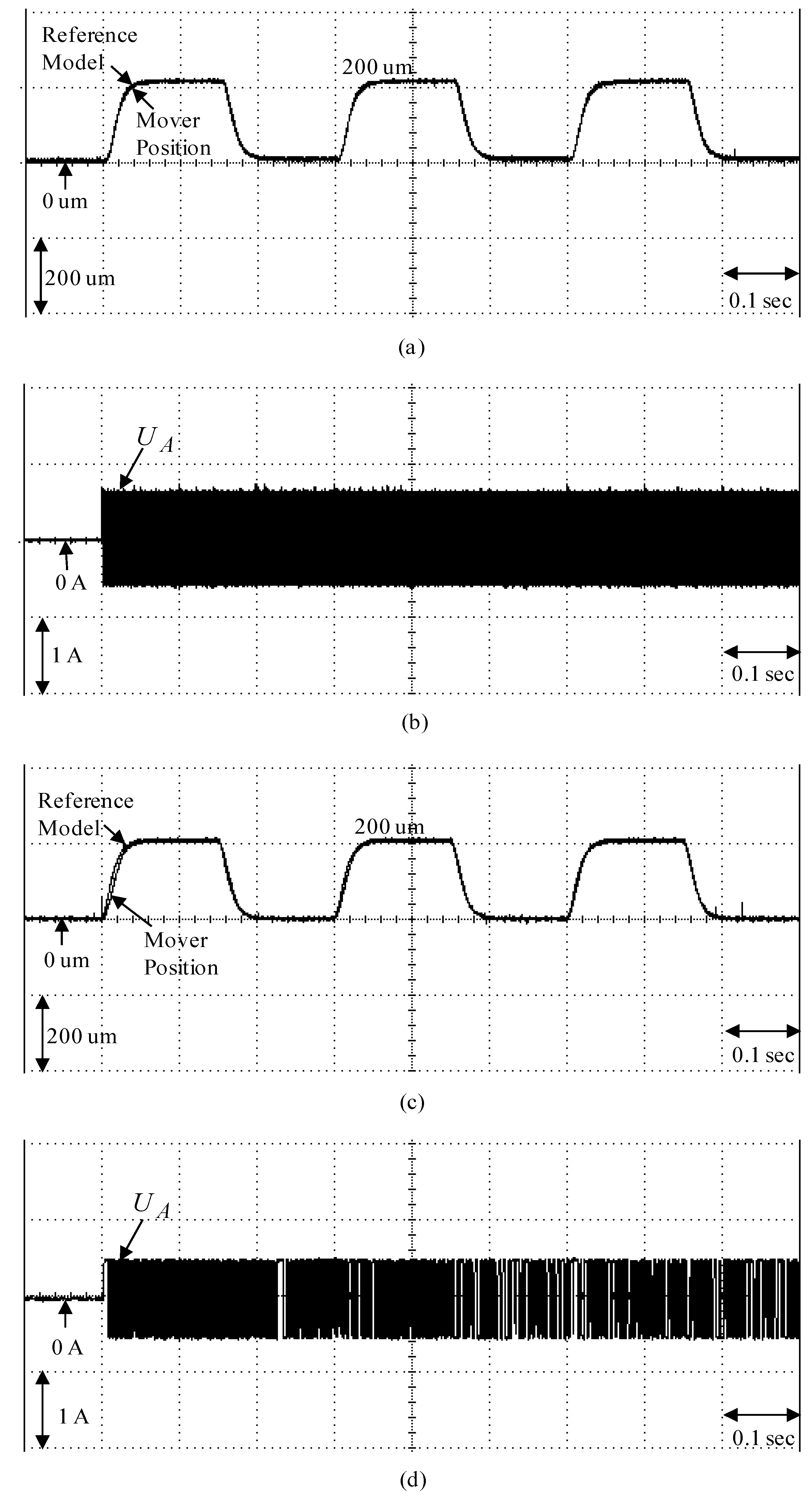
To demonstrate the control performance of the proposed control systems, two cases are provided in the experimentation here. One is the rated case that does not add any load weight onto the mover, and the other is the parametric variation case, which adds the load weight with a 6.3 kg iron disk onto the mover (i.e., it adds to the mover mass with about three times the rated case). The control objective was to drive the mover to move 200 µm, periodically. The experimental results by means of the micrometer backstepping control system using a switching function with an upper bound, which is shown in Figure 6, under the periodic step command and the sinusoidal command in the rated case and the parametric variation case are shown in Figure 7 and Figure 8, respectively. The motion responses of the mover in the rated and parametric variation cases are shown in Figure 7a,c, and Figure 8a,c; the associated control intensities are shown in Figure 7b,d and Figure 8b,d, respectively. Though fine0tracking responses can be obtained by means of the micrometer backstepping control system using the switching function with an upper bound, the oscillation in the control intensity of the linear motion single axis robot machine drive system are bigger due to a large control gain and upper bound.
The parameters of the micrometer backstepping control system using an amended recurrent Gottlieb polynomials neural network and AACO with the compensated controller are given as , , , . The sampling interval of the control processing in the experimentation was set at 1 msec. Furthermore, to show the effectiveness of the control system with a small number of neurons, the used amended recurrent Gottlieb polynomials neural network had 2, 4, and 1 neurons in the input layer, the hidden layer, and the output layer, respectively. The parameter adjustment process remained continually active for the duration of the experimentation. The experimental results of the micrometer backstepping control system using an amended recurrent Gottlieb polynomials neural network and AACO with the compensated controller under the periodic step command and the periodic sinusoidal command in the rated case and the parametric variation case are shown in Figure 9 and Figure 10. The position responses of the mover in the rated case and the parametric variation case are shown in Figure 9a,c and Figure 10a,c; the associated control intensities are shown in Figure 9b,d and Figure 10b,d. However, the robust control performances of the micrometer backstepping control system using an amended recurrent Gottlieb polynomials neural network and AACO with the compensated controller under the occurrence of parametric variations for two kinds of different trajectories are in evidence due to the online adaptive adjustment of the amended recurrent Gottlieb polynomials neural network. From the experimental results, the control performances of the micrometer backstepping control system using an amended recurrent Gottlieb polynomials neural network and AACO with the compensated controller are fine for the tracking of two periodic commands than the micrometer backstepping control system using the switching function with an upper bound.
Finally, the experimental result of the measured mover position response under step force disturbance with adding load in the 200 µm is shown in Figure 11 in regard to the micrometer backstepping control system using the switching function with upper bound and the micrometer backstepping control system using an amended recurrent Gottlieb polynomials neural network and AACO. Experimental results of measured mover position response for the micrometer backstepping control system using the switching function with an upper bound under step force disturbance with adding load in the 200 µm is shown in Figure 11a. The experimental result of the measured mover position response for the micrometer backstepping control system using an amended recurrent Gottlieb polynomials neural network and AACO with the compensated controller under step force disturbance with adding load in the 200 µm is shown in Figure 11b. From these experimental results, the transient response of the micrometer backstepping control system using an amended recurrent Gottlieb polynomials neural network and AACO with the compensated controller is better than the micrometer backstepping control system using the switching function with an upper bound under the load force regulation. However, the robust control performance of the micrometer backstepping control system using an amended recurrent Gottlieb polynomials neural network and AACO with the compensated controller was very outstanding in regard to controlling the linear motion single axis robot machine drive system in the tracking of periodic step and sinusoidal commands under the occurrence of parameter disturbance and the load force regulation, owing to the online adaptive adjustment of the amended recurrent Gottlieb polynomials neural network.
4. Discussion
In addition, Table 1 lists some of control performances for the micrometer backstepping control system using a switching function with an upper bound, and the micrometer backstepping control system using an amended recurrent Gottlieb polynomials neural network and AACO with the compensated controller with regard to the experimental results of the five tested cases.
The maximum errors of under the periodic step command in the rated case for the micrometer backstepping control system using a switching function with an upper bound and the micrometer backstepping control system using an amended recurrent Gottlieb polynomials neural network and AACO with the compensated controller are 12 µm and 10 µm, respectively.
The root-mean-square (RMS) errors of under the periodic step command in the rated case for the micrometer backstepping control system using the switching function with an upper bound and the micrometer backstepping control system using an amended recurrent Gottlieb polynomials neural network and AACO with the compensated controller are 8 µm and 6 µm, respectively.
Precision (Relative standard deviation of ) at 200 µm position under the periodic step command in the rated case for the micrometer backstepping control system using the switching function with an upper bound and the micrometer backstepping control system using an amended recurrent Gottlieb polynomials neural network and AACO with the compensated controller are 198.1 µm (±1.01%) and 198.8 µm (±0.91%), respectively.
Accuracy (Relative error of ) at 200 µm position under the periodic step command in the rated case for the micrometer backstepping control system using the switching function with an upper bound and the micrometer backstepping control system using an amended recurrent Gottlieb polynomials neural network and AACO with the compensated controller are 96.0% (±4.0%) and 97.0% (±3.0%), respectively.
The maximum errors of under the periodic step command in the parametric variation case for the micrometer backstepping control system using a switching function with an upper bound and the micrometer backstepping control system using an amended recurrent Gottlieb polynomials neural network and AACO with the compensated controller are 16 µm and 13 µm, respectively.
The RMS errors of under the periodic step command in the parametric variation case for the micrometer backstepping control system using the switching function with an upper bound and the micrometer backstepping control system using an amended recurrent Gottlieb polynomials neural network and AACO with the compensated controller are 11 µm and 8 µm, respectively.
Precision (Relative standard deviation of ) at 200 µm position under the periodic step command in the parametric variation case for the micrometer backstepping control system using the switching function with an upper bound and the micrometer backstepping control system using an amended recurrent Gottlieb polynomials neural network and AACO with the compensated controller are 197.6 µm (±1.57%) and 197.9 µm (±1.51%), respectively.
Accuracy (Relative error of ) at 200 um position under the periodic step command in the parametric variation case for the micrometer backstepping control system using the switching function with an upper bound and the micrometer backstepping control system using an amended recurrent Gottlieb polynomials neural network and AACO with the compensated controller are 94.5% (±5.5%) and 96.0% (±4.0%), respectively.
The maximum errors of under the periodic sinusoid command in the rated case for the micrometer backstepping control system using the switching function with an upper bound and the micrometer backstepping control system using an amended recurrent Gottlieb polynomials neural network and AACO with the compensated controller are 10 µm and 8 µm, respectively.
The RMS errors of under the periodic sinusoid command in the rated case for the micrometer backstepping control system using the switching function with an upper bound and the micrometer backstepping control system using an amended recurrent Gottlieb polynomials neural network and AACO with the compensated controller are 7 µm and 5 µm, respectively.
Precision (Relative standard deviation of ) at 200 µm position under the periodic sinusoid command in the rated case for the micrometer backstepping control system using the switching function with an upper bound and the micrometer backstepping control system using an amended recurrent Gottlieb polynomials neural network and AACO with the compensated controller are 198.6 µm (±1.00%) and 199.1 µm (±0.90%), respectively.
Accuracy (Relative error of ) at 200 µm position under the periodic sinusoid command in the rated case for the micrometer backstepping control system using the switching function with an upper bound and the micrometer backstepping control system using an amended recurrent Gottlieb polynomials neural network and AACO with the compensated controller are 96.5% (±3.5%) and 97.5% (±2.5%), respectively.
The maximum errors of under the periodic sinusoid command in the parametric variation case for the micrometer backstepping control system using the switching function with an upper bound and the micrometer backstepping control system using an amended recurrent Gottlieb polynomials neural network and AACO with the compensated controller are 15 µm and 12 µm, respectively.
The RMS errors of under the periodic sinusoid command in the parametric variation case for the micrometer backstepping control system using the switching function with an upper bound and the micrometer backstepping control system using an amended recurrent Gottlieb polynomials neural network and AACO with the compensated controller are 10 µm and 7 µm, respectively.
Precision (Relative standard deviation of ) at 200 µm position under the periodic sinusoid command in the parametric variation case for the micrometer backstepping control system using the switching function with an upper bound and the micrometer backstepping control system using an amended recurrent Gottlieb polynomials neural network and AACO with the compensated controller are 197.8 µm (±1.47%) and 198.0 µm (±1.40%), respectively.
Accuracy (Relative error of ) at 200 µm position under the periodic sinusoid command in the parametric variation case for the micrometer backstepping control system using the switching function with an upper bound and the micrometer backstepping control system using an amended recurrent Gottlieb polynomials neural network and AACO with the compensated controller are 95.0% (±5.0%) and 96.5% (±3.5%), respectively.
The maximum errors of under the step force disturbance with adding load in the 200 µm case for the micrometer backstepping control system using the switching function with an upper bound and the micrometer backstepping control system using an amended recurrent Gottlieb polynomials neural network and AACO with the compensated controller are 28 µm and 20 µm, respectively.
The RMS errors of under the step force disturbance with adding load in the 200 µm case for the micrometer backstepping control system using the switching function with an upper bound and the micrometer backstepping control system using an amended recurrent Gottlieb polynomials neural network and AACO with the compensated controller are 17 µm and 11 µm, respectively.
Precision (Relative standard deviation of ) at 200 µm position under the step force disturbance with adding load in the 200 µm case for the micrometer backstepping control system using the switching function with an upper bound and the micrometer backstepping control system using an amended recurrent Gottlieb polynomials neural network and AACO with the compensated controller are 196.5 µm (±2.09%) and 197.1 µm (±2.02%), respectively.
Accuracy (Relative error of ) at 200 µm position under the step force disturbance with adding load in the 200 µm case for the micrometer backstepping control system using the switching function with an upper bound and the micrometer backstepping control system using an amended recurrent Gottlieb polynomials neural network and AACO with the compensated controller are 91.5% (±8.5%) and 95.5% (±4.5%), respectively.
As a result of the micrometer backstepping control system using an amended recurrent Gottlieb polynomials neural network and AACO with the compensated controller has smaller tracking error in comparison with the micrometer backstepping control system using the switching function with an upper bound from Table 1. According to the tabulated measurements, the micrometer backstepping control system using an amended recurrent Gottlieb polynomials neural network and AACO indeed yields better control performance.
Besides, Table 2 enumerates the feature performance comparisons of the micrometer backstepping control system using the switching function with an upper bound and the micrometer backstepping control system using an amended recurrent Gottlieb polynomials neural network and AACO with the compensated controller in some experimental results.
Oscillation in the control intensity of the linear motion single axis robot machine drive system for the micrometer backstepping control system using the switching function with an upper bound and the micrometer backstepping control system using an amended recurrent Gottlieb polynomials neural network and AACO with the compensated controller are larger when within 20 µm and smaller within 2 µm, respectively.
The dynamic response of the motion position of the linear motion single axis robot machine for the micrometer backstepping control system using the switching function with an upper bound and the micrometer backstepping control system using an amended recurrent Gottlieb polynomials neural network and AACO with the compensated controller are faster within 0.01 s and fastest within 0.005 s, respectively.
Load regulation capability of the linear motion single axis robot machine for the micrometer backstepping control system using the switching function with an upper bound and the micrometer backstepping control system using an amended recurrent Gottlieb polynomials neural network and AACO with the compensated controller are good (maximum error as 28 µm with adding load in the 200 µm) and best (maximum error as 20 µm with adding load in 200 µm), respectively.
Convergent speed of the motion position of the linear motion single axis robot machine for the micrometer backstepping control system using the switching function with an upper bound and the micrometer backstepping control system using an amended recurrent Gottlieb polynomials neural network and AACO with the compensated controller are faster within 0.002 s and fastest within 0.001 s, respectively.
The position tracking error of the motion position of the linear motion single axis robot machine for the micrometer backstepping control system using the switching function with an upper bound and the micrometer backstepping control system using an amended recurrent Gottlieb polynomials neural network and AACO with the compensated controller are medium with maximum error of from 10 µm to 16 µm and small with a maximum error of from 8 µm to 13 µm, respectively.
The rejection capability for parameters’ disturbance of the motion position of the linear motion single axis robot machine for the micrometer backstepping control system using the switching function with an upper bound and the micrometer backstepping control system using an amended recurrent Gottlieb polynomials neural network and AACO with the compensated controller are good with maximum error of within 16 µm and better with a maximum error of within 13 µm, respectively.
The learning rate of the amended recurrent Gottlieb polynomials neural network for the micrometer backstepping control system using the switching function with an upper bound and the micrometer backstepping control system using an amended recurrent Gottlieb polynomials neural network and AACO with the compensated controller are none and variable (optimal rate), respectively.
The various performances in Table 2 for the micrometer backstepping control system using an amended recurrent Gottlieb polynomials neural network and AACO with the compensated controller are better than the micrometer backstepping control system using the switching function with an upper bound with regard to the oscillation in the control intensity, the dynamic response, the load regulation capability, the convergent speed, the position tracking error, and the rejection capability of parameter disturbance.
5. Conclusions
In this paper, the micrometer backstepping control system using the amended recurrent Gottlieb polynomials neural network and AACO with the compensated controller was proposed to control the linear motion single axis robot machine drive system under the occurrence of parameter disturbance for the position tracking of periodic reference inputs. The important contributions of this paper are as follows: (1) The DSP-based current-regulation PWM control scheme has been successfully applied to control the linear motion single axis robot machine drive system; (2) the micrometer backstepping control system using an amended recurrent Gottlieb polynomials neural network with the compensated controller has been successfully derived according to the Lyapunov function for diminishing the lumped uncertainty effect; (3) to achieve high-precision control performance, an adaptive law of the amended recurrent Gottlieb polynomials neural network based on the Lyapunov function has been successfully applied for estimating the lumped uncertainty; (4) an error-estimated law of the compensated controller has been successfully used to compensate the estimated error; and (5) the AACO has been successfully used for regulating two variable learning rates in the weights of the amended recurrent Gottlieb polynomials neural network to speed up the convergent speed. The various performances verified by the experimental results in Table 1 and Table 2 for the micrometer backstepping control system using an amended recurrent Gottlieb polynomials neural network and AACO with the compensated controller are better than the micrometer backstepping control system using a switching function with an upper bound.
Author Contributions
C.-H.L. and K.-T.C. conceived and designed the control system of experiments; C.-H.L. performed the software programs and the experiments; C.-H.L. analyzed the data for writing the paper; C.-H.L. and K.-T.C. revised the paper.
Funding
This research was funded by the Ministry of Science and Technology of Taiwan, under grant MOST 107-2221-E-239-021.
Acknowledgments
The author would like to acknowledge the financial support of the Ministry of Science and Technology of Taiwan under grant MOST 107-2221-E-239-021.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Boldea, I.; Nasar, S.A. Linear Electric Actuators and Generators; Cambridge University Press: London, UK, 1999; pp. 68–87. [Google Scholar]
- Sanada, M.; Morimoto, S.; Takeda, Y. Interior permanent magnet linear synchronous motor for high-performance drives. IEEE Trans. Ind. Appl. 1997, 33, 966–972. [Google Scholar] [CrossRef]
- Lin, C.H. Precision motion control of a linear permanent magnet synchronous machine based on linear optical-ruler sensor and Hall sensor. Sensors. 2018, 18. [Google Scholar] [CrossRef] [PubMed]
- Kanellakopoulos, I.; Kokotovic, P.V.; Morse, A.S. Systematic design of adaptive controller for feedback linearizable system. IEEE Trans. Autom. Control. 1991, 36, 1241–1253. [Google Scholar] [CrossRef]
- Krstic, M.; Kokotovic, P.V. Adaptive nonlinear design with controller-identifier separation and swapping. IEEE Trans. Autom. Control. 1995, 40, 426–440. [Google Scholar] [CrossRef] [Green Version]
- Bartolini, G.; Ferrara, A.; Giacomini, L.; Usai, E. Peoperties of a combined adaptive/second-order sliding mode control algorithm for some classes of uncertain nonlinear systems. IEEE Trans. Autom. Control. 2000, 45, 1334–1341. [Google Scholar] [CrossRef]
- Lin, C.H. A backstepping control of LSM drive systems using adaptive modified recurrent Laguerre OPNNUO. J. Power Electron. 2016, 16, 598–609. [Google Scholar] [CrossRef]
- Xia, D.; Yao, Y.; Cheng, L. Indoor autonomous control of a two-wheeled inverted pendulum vehicle using ultra wide band technology. Sensors 2017, 17, 1401. [Google Scholar] [CrossRef] [PubMed]
- Ai, Q.; Zhu, C.; Zuo, J.; Meng, W.; Liu, Q.; Xie, S.Q.; Yang, M. Disturbance-estimated adaptive backstepping sliding mode control of a pneumatic muscles-driven ankle rehabilitation robot. Sensors 2018, 18, 66. [Google Scholar] [CrossRef] [PubMed]
- Chen, X.; Wang, D.; Yin, J.; Wu, Y. A direct position-determination approach for multiple sources based on neural network computation. Sensors 2018, 18, 1925. [Google Scholar] [CrossRef] [PubMed]
- Almassri, A.M.M.; Wan, H.W.Z.; Ahmad, S.A.; Shafie, S.; Wada, C.; Horio, K. Self-calibration algorithm for a pressure sensor with a real-time approach based on an artificial neural network. Sensors 2018, 18, 2561. [Google Scholar] [CrossRef] [PubMed]
- Hu, J.; Wu, Z.; Qin, X.; Geng, H.; Gao, Z. An extended kalman filter and back propagation neural network algorithm positioning method based on anti-lock brake sensor and global navigation satellite system information. Sensors 2018, 18, 275. [Google Scholar] [CrossRef] [PubMed]
- Lin, C.H. Adaptive nonlinear backstepping control using mended recurrent Romanovski polynomials neural network and mended particle swarm optimization for switched reluctance motor drive system. Trans. Inst. Meas. Control 2019. [Google Scholar] [CrossRef]
- Lin, C.H.; Chang, K.T. SCRIM drive system using adaptive backstepping control and mended recurrent Romanovski polynomials neural network with reformed particle swarm optimization. Int. J. Adapt. Control Signal Process. 2019, 33, 802–828. [Google Scholar] [CrossRef]
- Lin, C.H. A SCRIM drive system using backstepping control and revamped recurrent Romanovski PNN with mended ACO. IETE J. Res. 2019. [Google Scholar] [CrossRef]
- Lin, C.H.; Chang, K.T. Switched reluctance motor circuit drive system using adaptive nonlinear backstepping control with mended recurrent Romanovski polynomials neural network and mended particle swarm optimization. Int. J. Numer. Model. Electron. Netw. Devices Fields 2019, 32, e2629. [Google Scholar] [CrossRef]
- Ting, J.C.; Chen, D.F. Novel mingled reformed recurrent Hermite polynomial neural network control system applied in continuously variable transmission system. J. Mech. Sci. Technol. 2018, 32, 4399–4412. [Google Scholar] [CrossRef]
- Gottlieb, M.J. Concerning some polynomials orthogonal on a finite or enumerable set of points. Am. J. Math. 1938, 60, 453–458. [Google Scholar] [CrossRef]
- Khan, M.A.; Akhlaq, M. The present paper deals with certain generating functions of Gottlieb polynomials of several variables. Int. Trans. Appl. Sci. 2009, 1, 567–570. [Google Scholar]
- Choi, J. A generalization of Gottlieb polynomials in several variables. Appl. Math. Lett. 2012, 25, 43–46. [Google Scholar] [CrossRef] [Green Version]
- Dorigo, M.; Stützle, T. Ant Colony Optimization; Massachusetts: MIT Press: Cambridge, UK, 2004; pp. 91–101. [Google Scholar]
- Idris, H.; Ezugwu, A.E.; Junaidu, S.B.; Adewumi, A.O. An improved ant colony optimization algorithm with fault tolerance for job scheduling in grid computing systems. PLoS ONE 2017, 12, e0177567. [Google Scholar] [CrossRef]
- Slotine, J.J.E.; Li, W. Applied Nonlinear Control; Prentice-Hall: Englewood Cliffs, NJ, USA, 1991; pp. 102–121. [Google Scholar]
- Astrom, J.; Wittenmark, B. Adaptive Control; Addison-Wesley: New York, NY, USA, 1995; pp. 65–81. [Google Scholar]
- Ku, C.C.; Lee, K.Y. Diagonal recurrent neural networks for dynamic system control. IEEE Trans. Neural Netw. 1995, 6, 144–156. [Google Scholar] [PubMed]
- Lin, C.H. Recurrent modified Elman neural network control of PM synchronous generator system using wind turbine emulator of PM synchronous servo motor drive. Int. J. Electr. Power Energy Syst. 2013, 52, 143–160. [Google Scholar] [CrossRef]
- Lewis, F.L.; Campos, J.; Selmic, R. Neuro-Fuzzy Control of Industrial Systems with Actuator Nonlinearities; SIAM Frontiers in Applied Mathematics: Auckland, New Zealand, 2002; pp. 78–94. [Google Scholar]
Figure 1.
Makeup of linear motion single axis robot machine and drive system.

Figure 2.
Simplified block diagram of linear motion single axis robot machine drive system.

Figure 3.
Micrometer backstepping control system using an amended recurrent Gottlieb polynomials neural network and altered ant colony optimization with the compensated controller.
Figure 3.
Micrometer backstepping control system using an amended recurrent Gottlieb polynomials neural network and altered ant colony optimization with the compensated controller.

Figure 4.
Makeup of the three-layer amended recurrent Gottlieb polynomials neural network.

Figure 5.
A picture of the experimental set-up of the linear motion single axis robot machine drive system.
Figure 5.
A picture of the experimental set-up of the linear motion single axis robot machine drive system.

Figure 6.
Micrometer backstepping control system using switching function with upper bound.

Figure 7.
Experimental results of the micrometer backstepping control system using the switching function with an upper bound for the periodic step command: (a) mover position in the rated case; (b) control intensity in the rated case; (c) mover position in the parametric variation case; (d) control intensity in the parametric variation case.
Figure 7.
Experimental results of the micrometer backstepping control system using the switching function with an upper bound for the periodic step command: (a) mover position in the rated case; (b) control intensity in the rated case; (c) mover position in the parametric variation case; (d) control intensity in the parametric variation case.

Figure 8.
Experimental results of the micrometer backstepping control system using the switching function with an upper bound for the periodic sinusoid command: (a) mover position in the rated case; (b) control intensity in the rated case; (c) mover position in the parametric variation case; (d) control intensity in the parametric variation case.
Figure 8.
Experimental results of the micrometer backstepping control system using the switching function with an upper bound for the periodic sinusoid command: (a) mover position in the rated case; (b) control intensity in the rated case; (c) mover position in the parametric variation case; (d) control intensity in the parametric variation case.

Figure 9.
Experimental results of the micrometer backstepping control system using an amended recurrent Gottlieb polynomials neural network and altered ant colony optimization (AACO) with the compensated controller for the periodic step command: (a) mover position in the rated case; (b) control intensity in the rated case; (c) mover position in the parametric variation case; (d) control intensity in the parametric variation case.
Figure 9.
Experimental results of the micrometer backstepping control system using an amended recurrent Gottlieb polynomials neural network and altered ant colony optimization (AACO) with the compensated controller for the periodic step command: (a) mover position in the rated case; (b) control intensity in the rated case; (c) mover position in the parametric variation case; (d) control intensity in the parametric variation case.

Figure 10.
Experimental results of the micrometer backstepping control system using an amended recurrent Gottlieb polynomials neural network and AACO with the compensated controller for the periodic sinusoid command: (a) mover position in the rated case; (b) control intensity in the rated case; (c) mover position in the parametric variation case; (d) control intensity in the parametric variation case.
Figure 10.
Experimental results of the micrometer backstepping control system using an amended recurrent Gottlieb polynomials neural network and AACO with the compensated controller for the periodic sinusoid command: (a) mover position in the rated case; (b) control intensity in the rated case; (c) mover position in the parametric variation case; (d) control intensity in the parametric variation case.

Figure 11.
Experimental results of measured mover position response under the step force disturbance with adding load in the 200um: (a) for the micrometer backstepping control system using switching function with upper bound; (b) for the micrometer backstepping control system using an amended recurrent Gottlieb polynomials neural network and AACO with the compensated controller.
Figure 11.
Experimental results of measured mover position response under the step force disturbance with adding load in the 200um: (a) for the micrometer backstepping control system using switching function with upper bound; (b) for the micrometer backstepping control system using an amended recurrent Gottlieb polynomials neural network and AACO with the compensated controller.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Performance comparison of control systems.
| Control system and five tested cases | micrometer backstepping control system using switching function with upper bound | |||||
| Performance | under the periodic step command in the rated case | under the periodic step command in the parametric variation case | under the periodic sinusoid command in the rated case | under the periodic sinusoid command in the parametric variation case | under the step force disturbance with adding load in the 200 µm case | |
| Maximum error of | 12 µm | 16 µm | 10 µm | 15 µm | 28 µm | |
| RMS error of | 8 µm | 11 µm | 7 µm | 10 µm | 17 µm | |
| Precision (Relative standard deviation of ) at 200 µm position | 198.1 µm (±1.01%) | 197.6 µm (±1.57%) | 198.6 µm (±1.00%) | 197.8 µm (±1.47%) | 196.5 µm (±2.09%) | |
| Accuracy (Relative error of ) at 200 µm position | 96.0% (±4.0%) | 94.5% (±5.5%) | 96.5% (±3.5%) | 95.0% (±5.0%) | 91.5% (±8.5%) | |
| Control system and five tested cases | micrometer backstepping control system by using an amended recurrent Gottlieb polynomials neural network and AACO with the compensated controller | |||||
| performance | under periodic step command in the rated case | under the periodic step command in the parametric variation case | under the periodic sinusoid command in the rated case | under the periodic sinusoid command in the parametric variation case | under the step force disturbance with adding load in the 200um case | |
| Maximum error of | 10 µm | 13 µm | 8 µm | 12 µm | 20 µm | |
| RMS error of | 6 µm | 8 µm | 5 µm | 7 µm | 9 µm | |
| Precision (Relative standard deviation of ) at 200 µm position | 198.8 µm (±0.91%) | 197.9 µm (±1.51%) | 199.1 µm (±0.90%) | 198.0 µm (±1.40%) | 197.1 µm (±2.02%) | |
| Accuracy (Relative error of ) at 200 µm position | 97.0% (±3.0%) | 96.0% (±4.0%) | 97.5% (±2.5%) | 96.5% (±3.5%) | 95.5% (±4.5%) | |
Table 2.
Feature performance comparisons of control systems.
| Control system | micrometer backstepping control system using switching function with upper bound | micrometer backstepping control system using an amended recurrent Gottlieb polynomials neural network and AACO with the compensated controller | |
| Feature Performance | |||
| Oscillation in the control intensity of the linear motion single axis robot machine drive system | Larger within 20 µm | Smaller within 2 µm | |
| Dynamic response of the motion position of the linear motion single axis robot machine | Faster within 0.01 s | Fastest within 0.005 s | |
| Load regulation capability of the linear motion single axis robot machine | Good (maximum error as 28 µm with adding load in the 200 µm) | Best (maximum error as 20 µm with adding load in the 200 µm) | |
| Convergent speed of the motion position of the linear motion single axis robot machine | Faster within 0.002 s | Fastest within 0.001 s | |
| Position tracking error of the motion position of the linear motion single axis robot machine | Middle with maximum error of from 10 µm to 16 µm | Small with maximum error of from 8um to 13 µm | |
| Rejection capability for parameters disturbance of the motion position of the linear motion single axis robot machine | Good with maximum error of within 16um | Better with maximum error of within 13 µm | |
| Learning rate of the amended recurrent Gottlieb polynomials neural network | None | Vary (optimal rate) | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Lin, C.-H.; Chang, K.-T. Micrometer Backstepping Control System for Linear Motion Single Axis Robot Machine Drive. Sensors 2019, 19, 3616. https://doi.org/10.3390/s19163616
AMA Style
Lin C-H, Chang K-T. Micrometer Backstepping Control System for Linear Motion Single Axis Robot Machine Drive. Sensors. 2019; 19(16):3616. https://doi.org/10.3390/s19163616
Chicago/Turabian StyleLin, Chih-Hong, and Kuo-Tsai Chang. 2019. "Micrometer Backstepping Control System for Linear Motion Single Axis Robot Machine Drive" Sensors 19, no. 16: 3616. https://doi.org/10.3390/s19163616
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.