
FOG Random Drift Signal Denoising Based on the Improved AR Model and Modified Sage-Husa Adaptive Kalman Filter


Abstract
:
1. Introduction
2. Online Modeling of FOG Random Drift
2.1. The Principle of Online Modeling
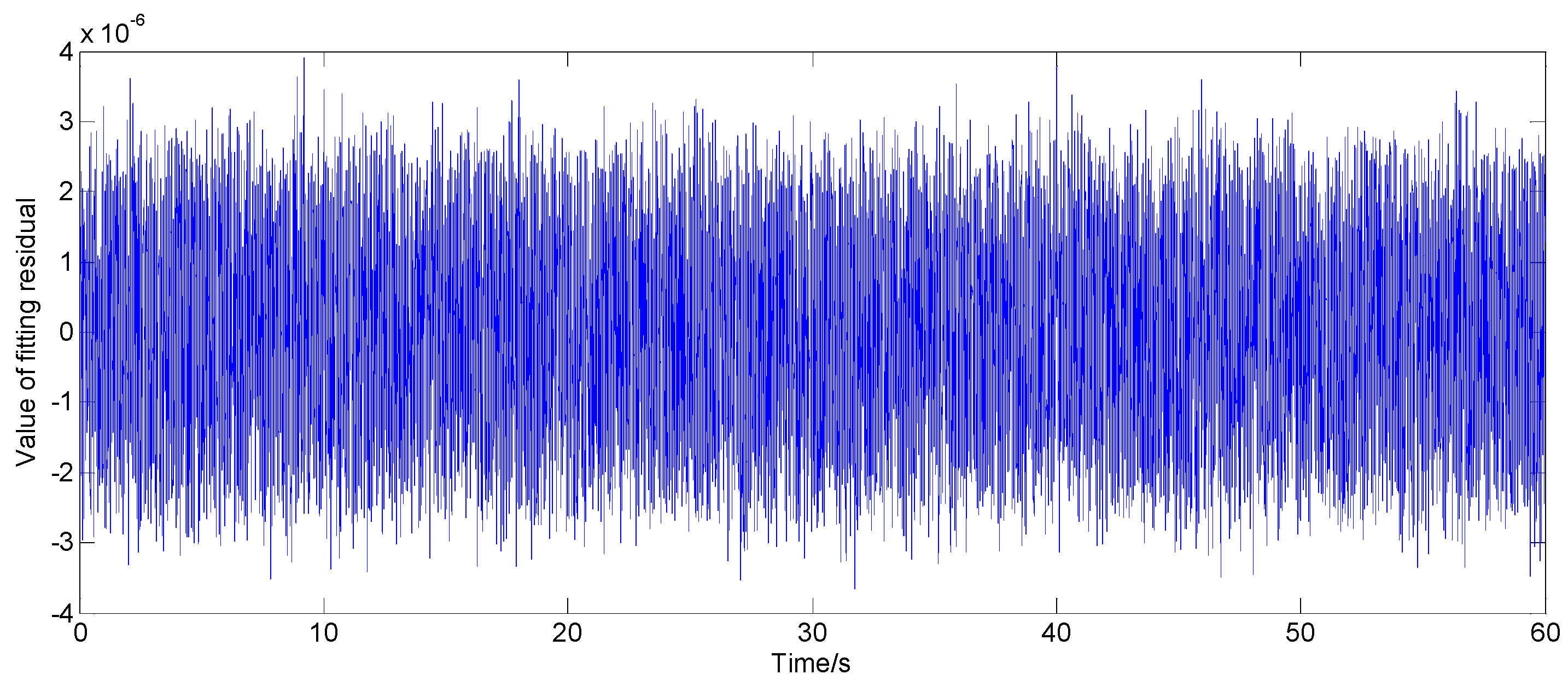
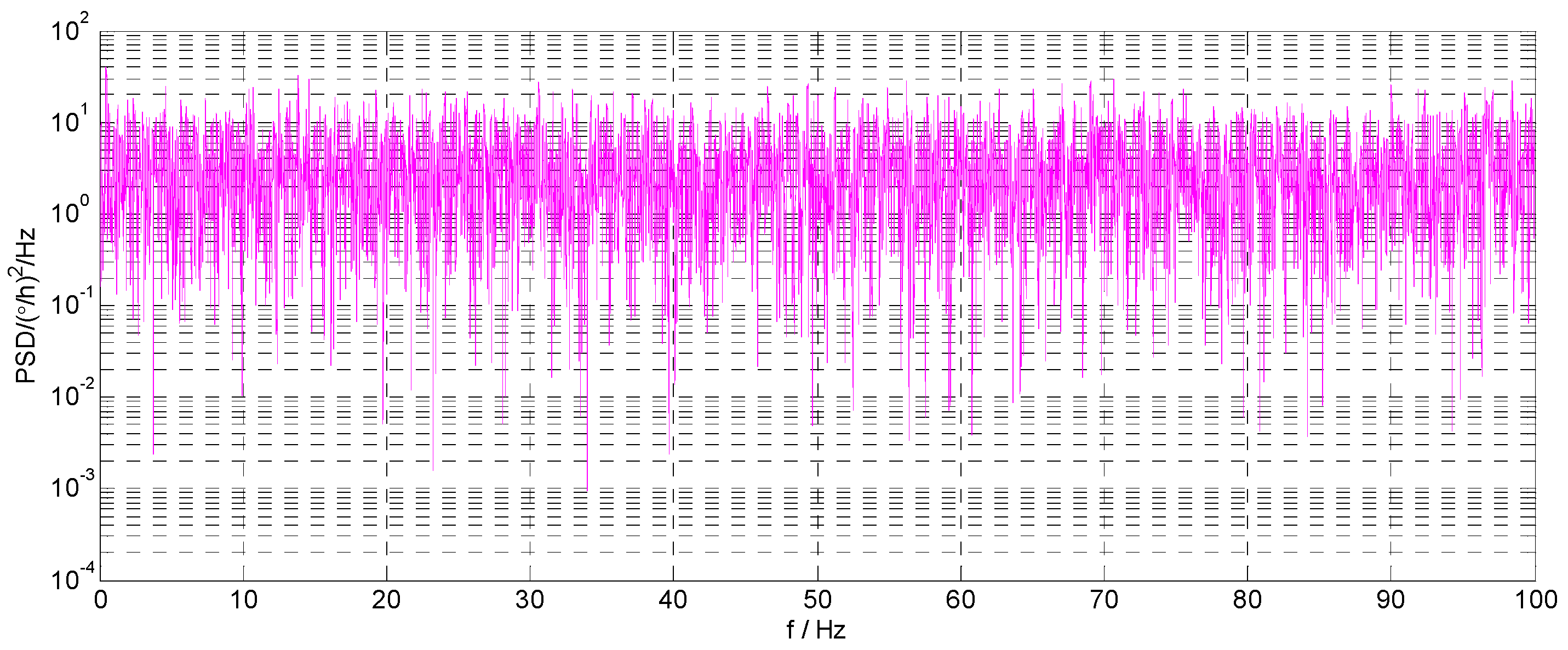
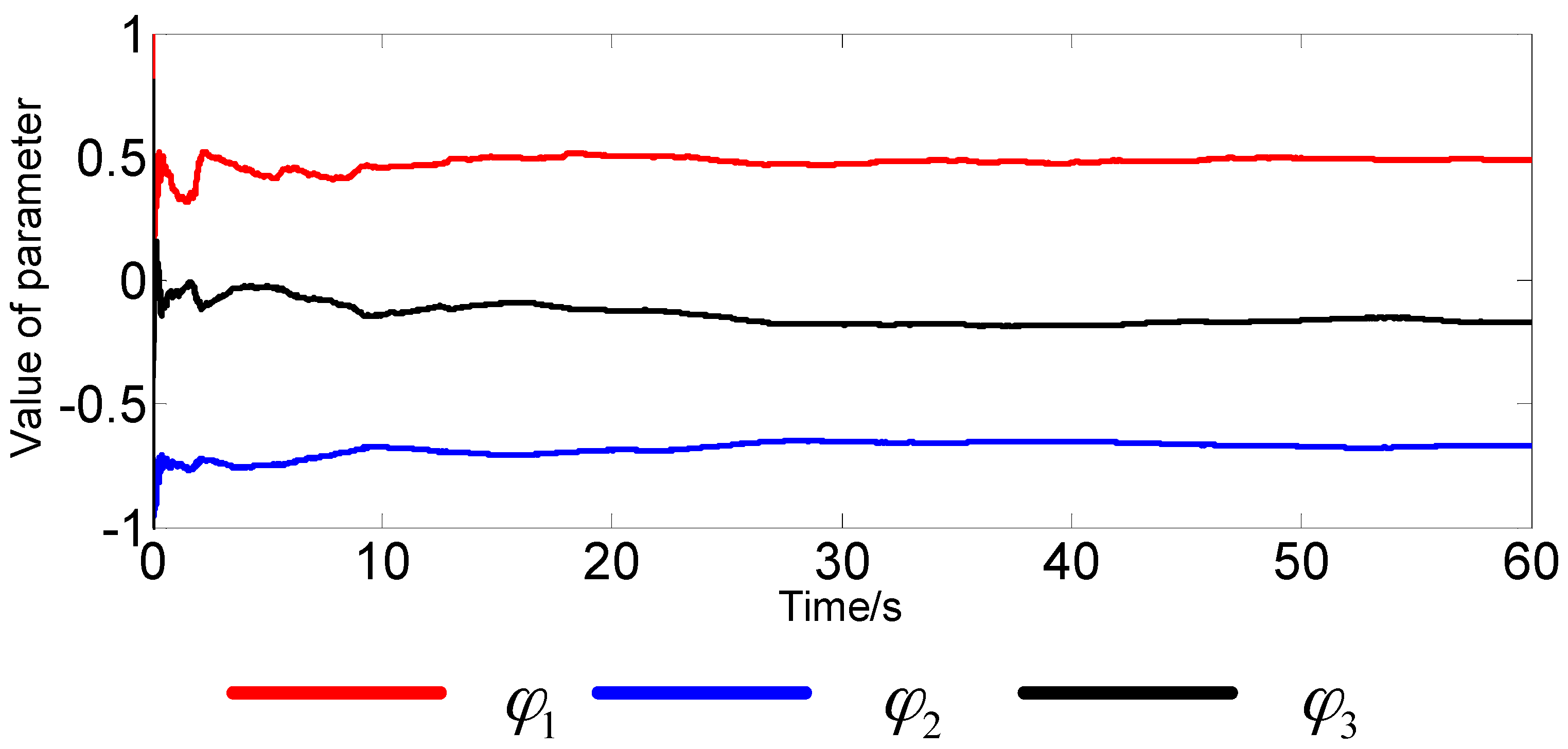
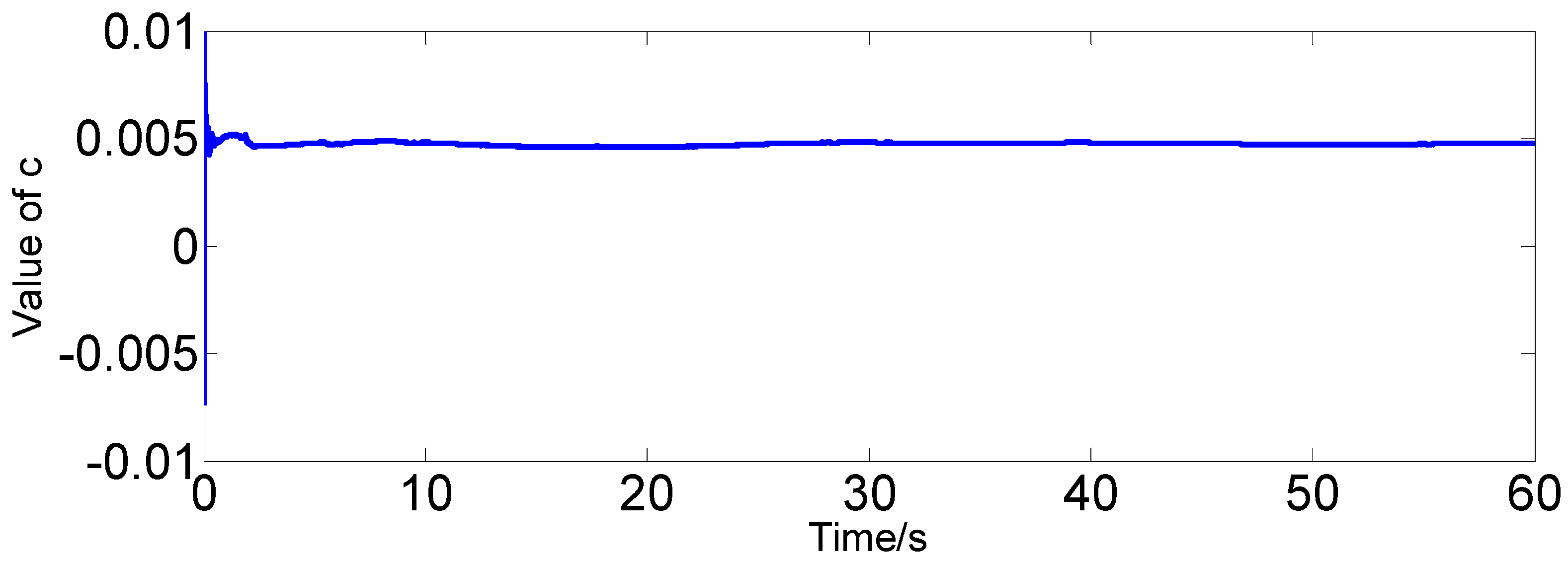
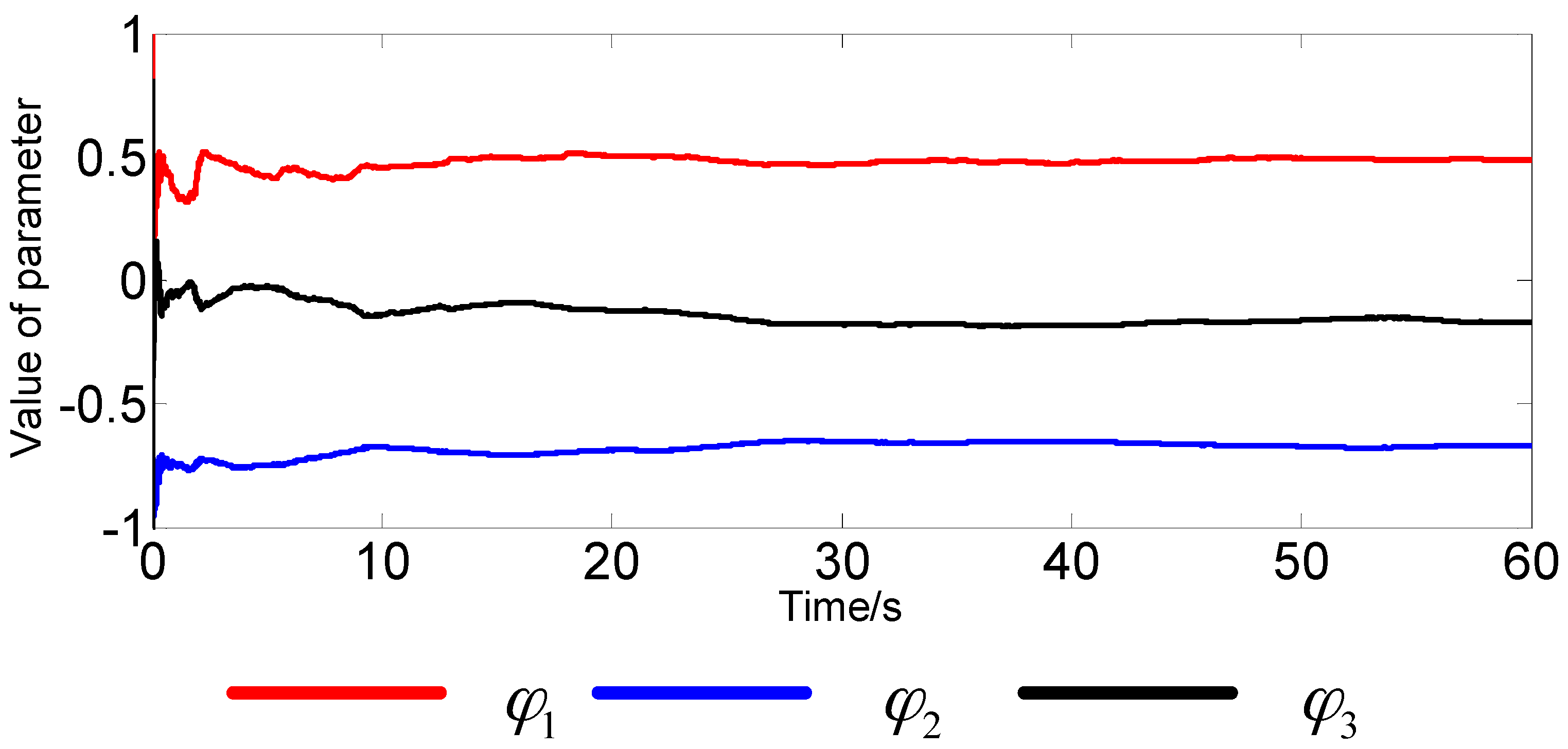
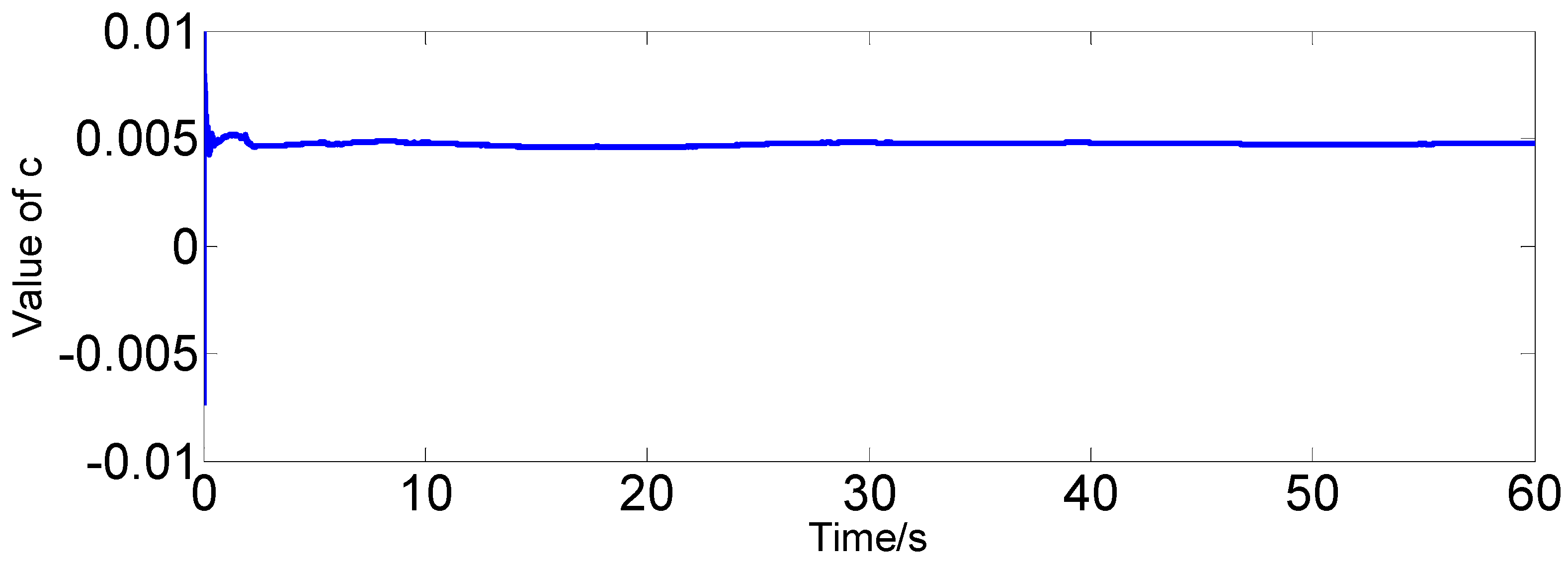
2.2. Estimation of Model Parameters
3. Real-Time Filtering
3.1. Selection of the Filter
3.2. Sage-Husa Adaptive Kalman Filter
3.2.1. Design of SHAKF
3.2.2. Analysis of the SHAKF Algorithm
- The noise estimator cannot estimate the statistical properties of the process noise and measurement noise at the same time. Notice that the estimations of system noise and measurement noise both depend on the innovation, more specifically in the formula of . This is because reflects the changes in the statistical characteristics of two kinds of noise at the same time, but in fact, does not accurately reflect which kind of noise has changed. Assume that the measurement noise changes and process noise remain constant from a certain moment, then the covariance matrix of the measurement noise can be correctly estimated by means of Equation (22); and the estimated covariance matrix of the process noise obtained through Equation (26) is obviously inaccurate.
- Suppose the expected value of measurement noise is , then the observation equation can be expressed as:and can be obtained as follows:
- 3.
- The recursive formula of measurement noise covariance matrix is rewritten as follows:
- 4.
- The recursive formula of can also be rewritten as follows:
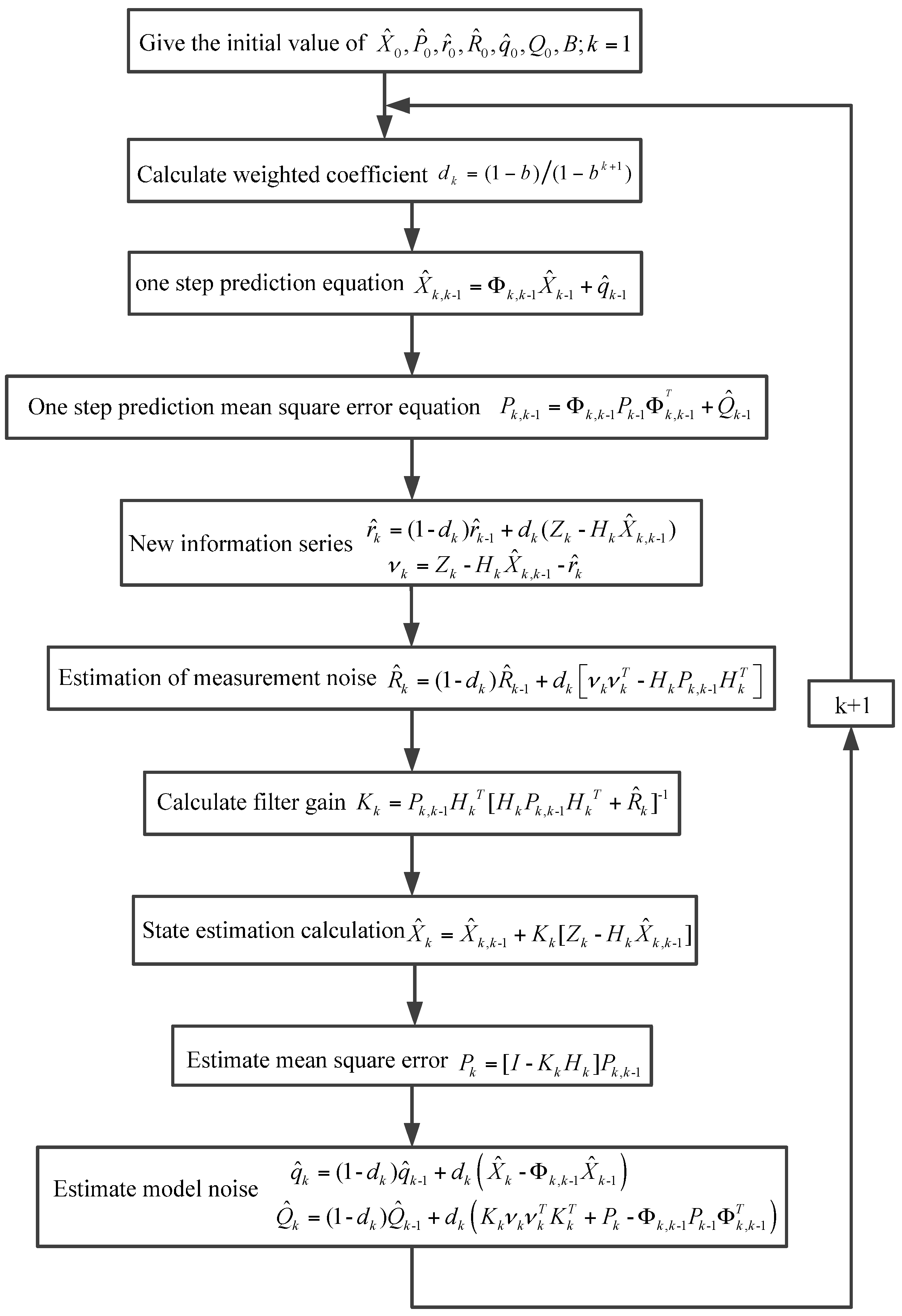
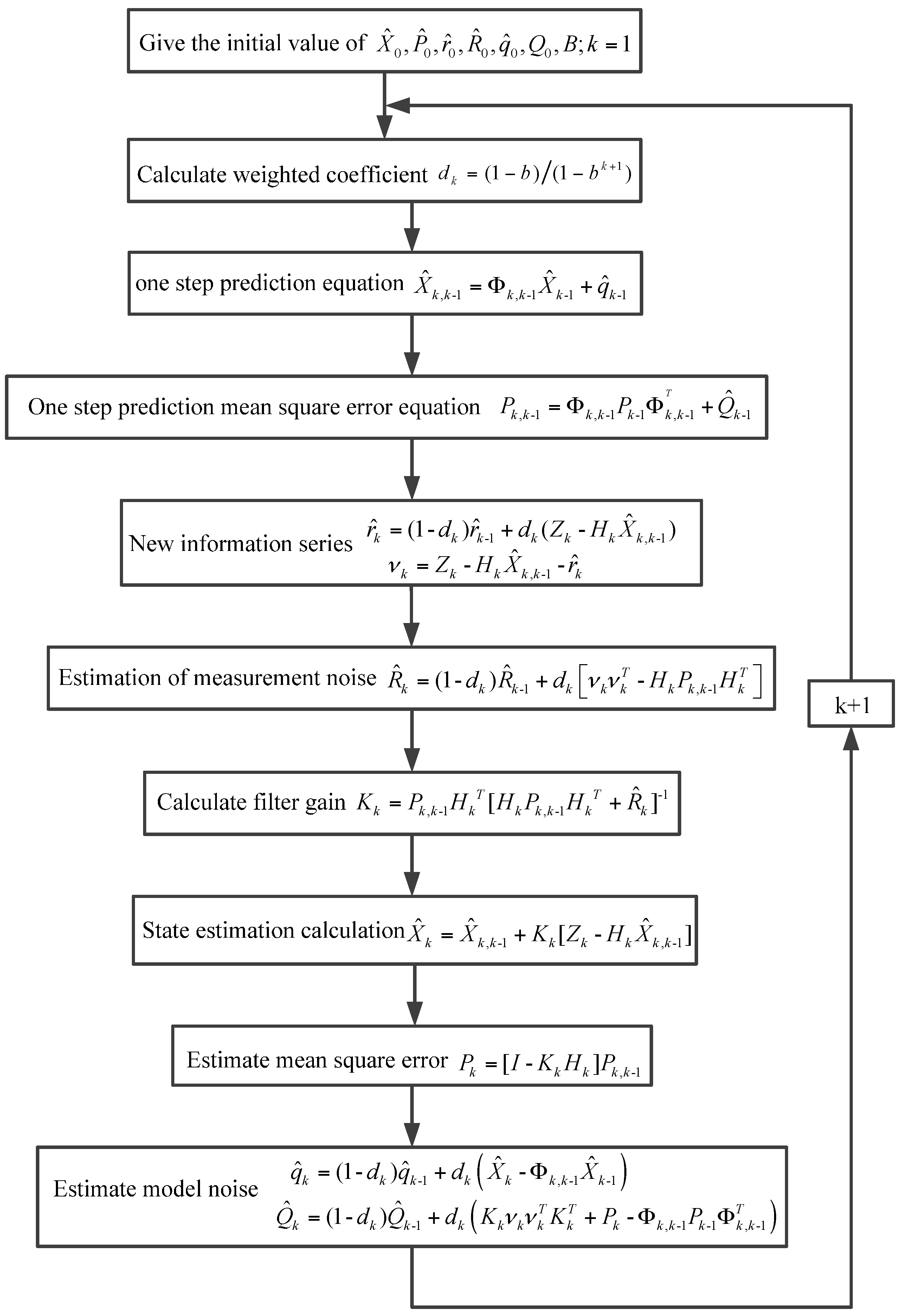
3.2.3. Improvement of the SHAKF Algorithm
- 1.
- A criterion of filtering convergence is introduced for the estimator, which is used to judge whether there is a large change in the measurement noise. The criterion is formulated as:where denotes the trace of the matrix ; is used to control the strictness degree of criterion, and its range is . The specific method of use is: update the above criterion with new innovation; if the criterion is established, carry out the filtering; if not, indicating that the measurement noise variance changes greatly, then calculate the weight value from the initial value, i.e., the value of k is zero.
- 2.
- The estimator of is rewritten in the following form:where the related items of the one-step prediction error covariance matrix are cast out on the basis of Equation (22). Although the change is at the expense of certain filtering accuracy, the stability of the filter is improved.
4. Experiment and Analysis of Adaptive Filtering Based on the AR Model
4.1. The Filtering Equation
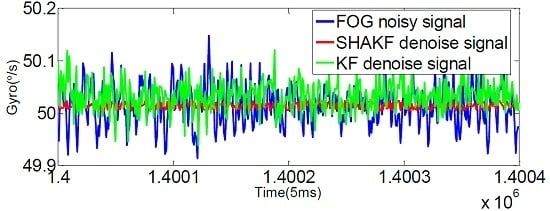
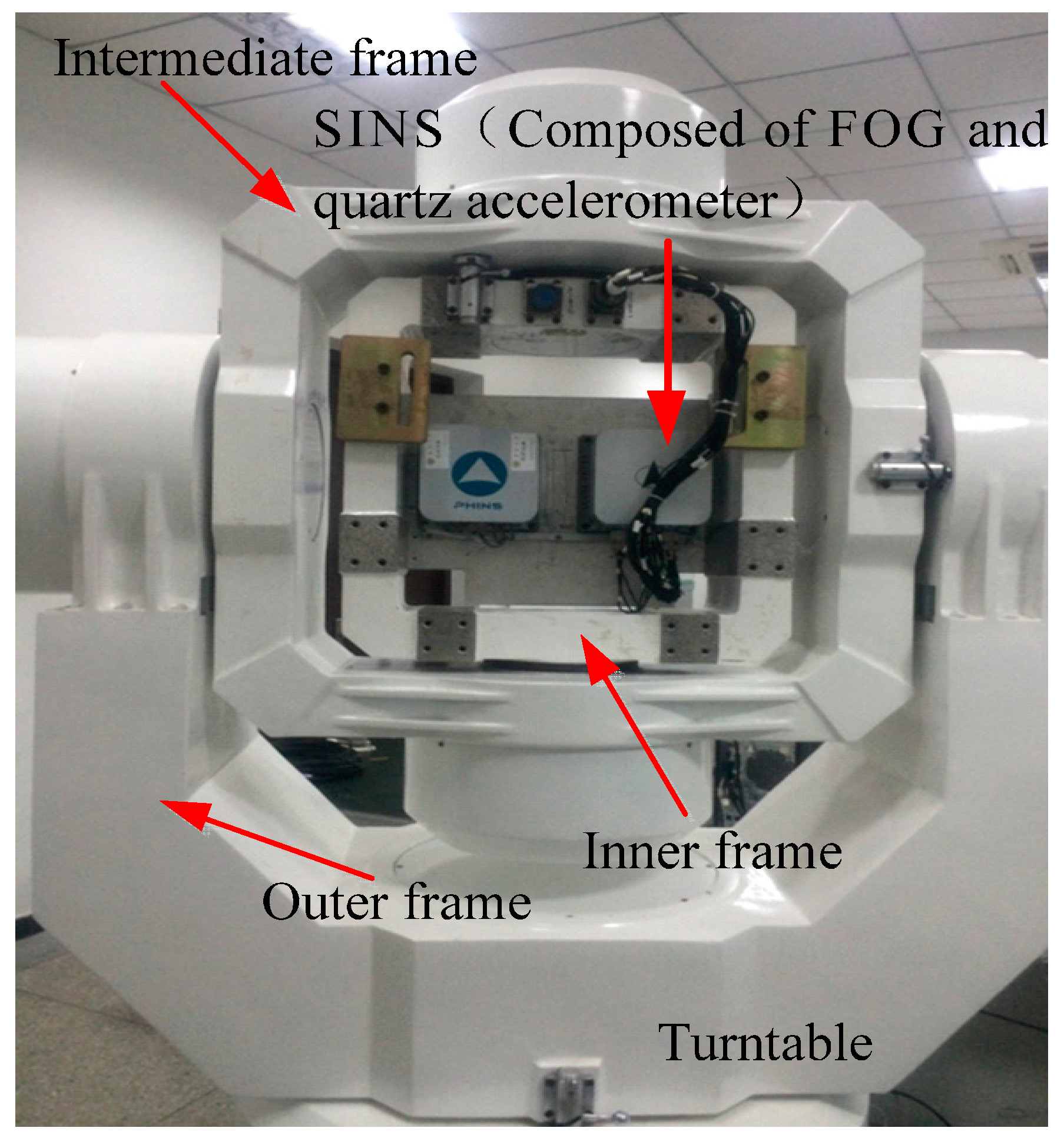
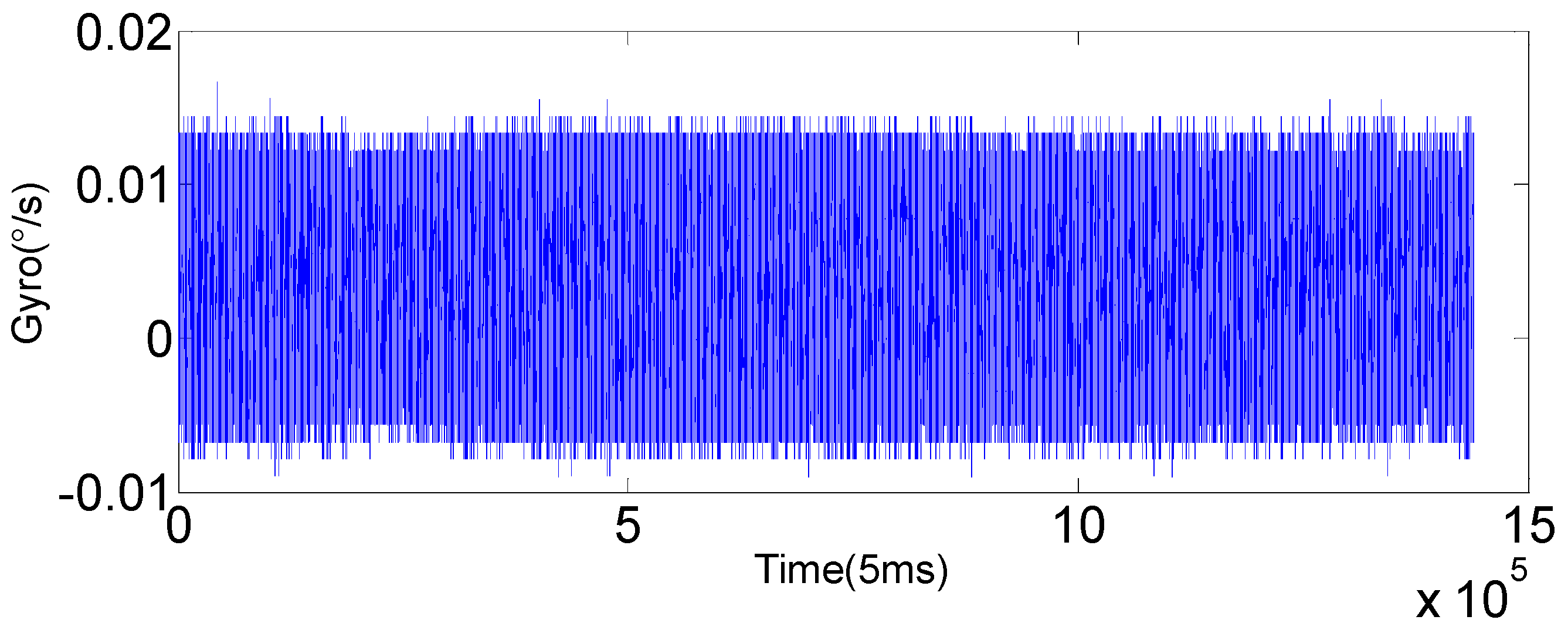
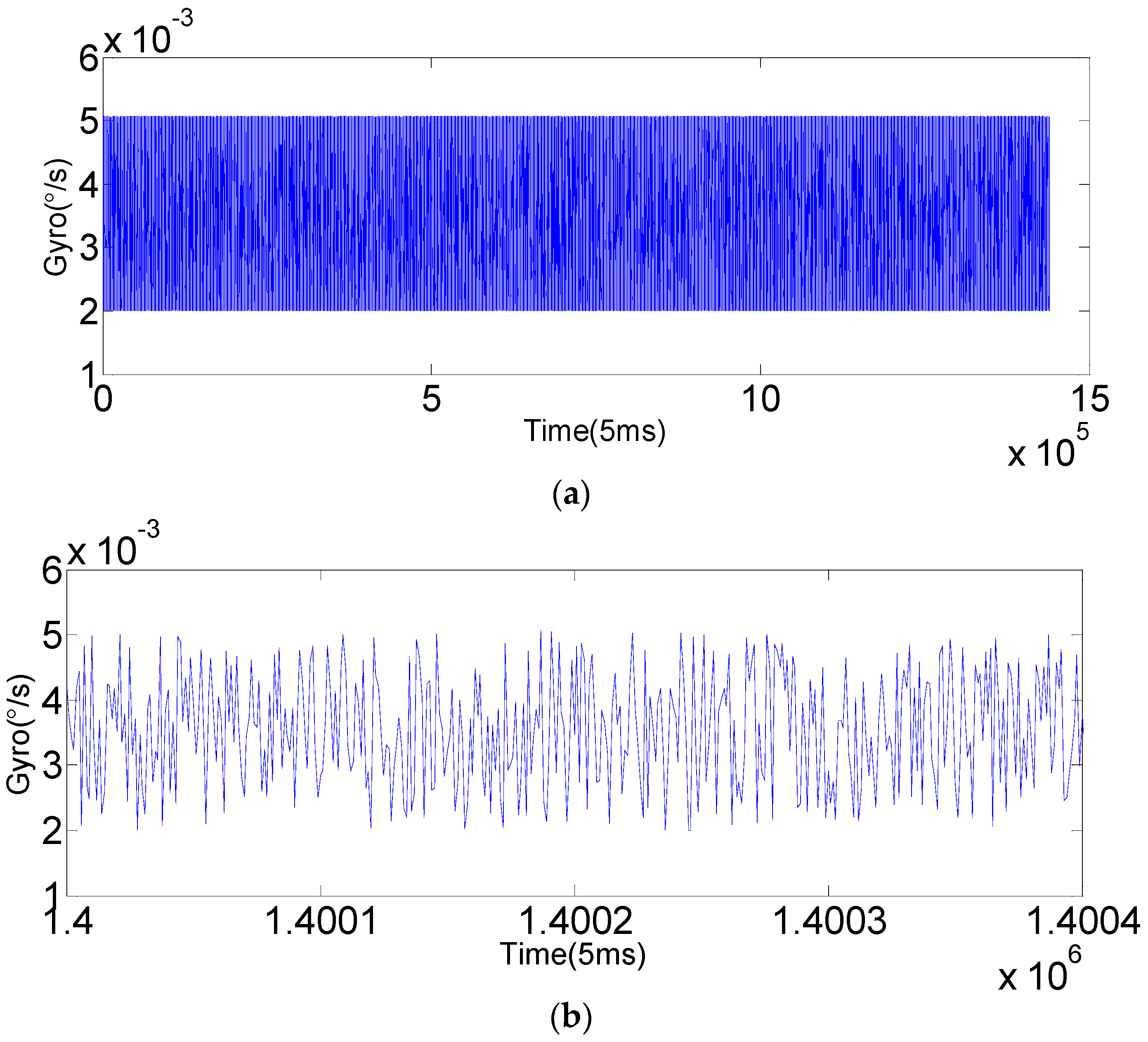
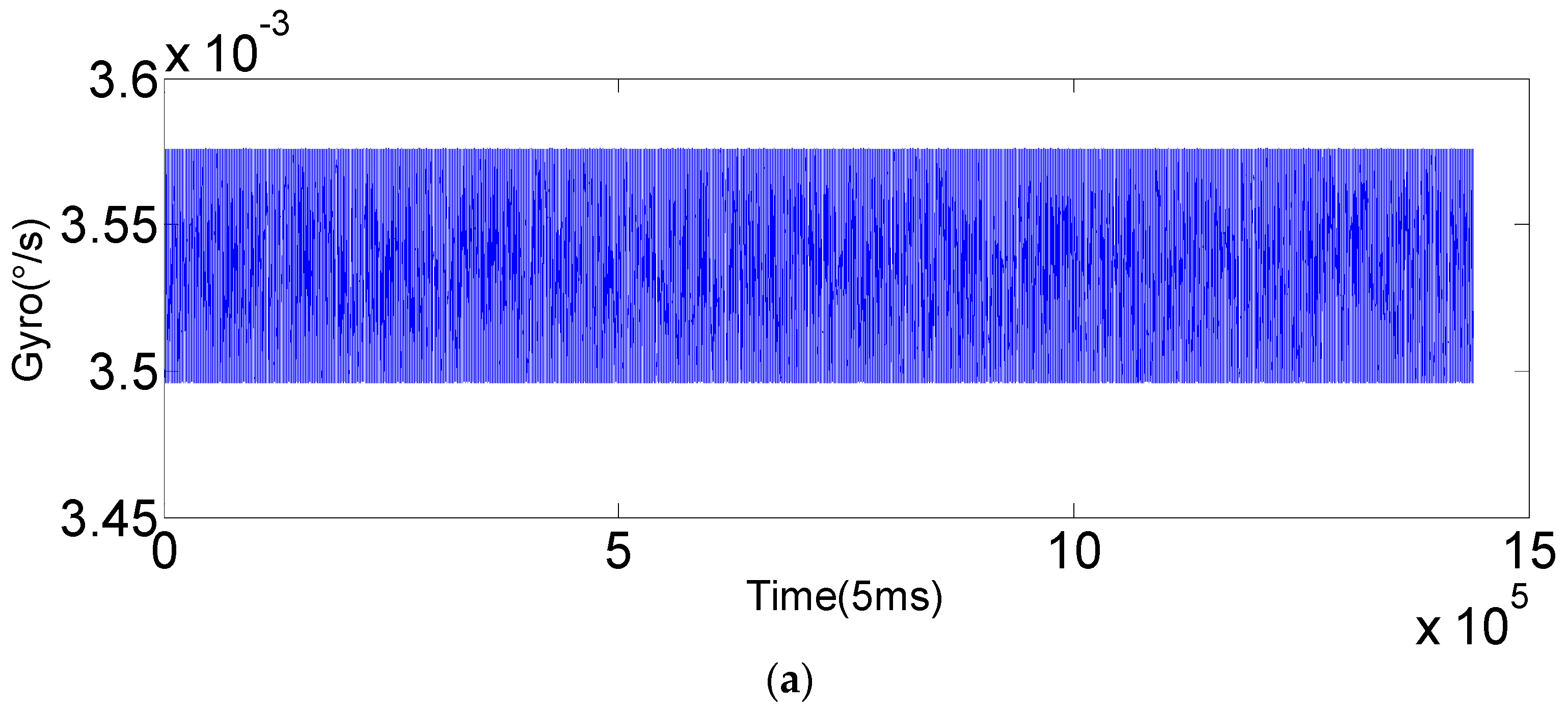
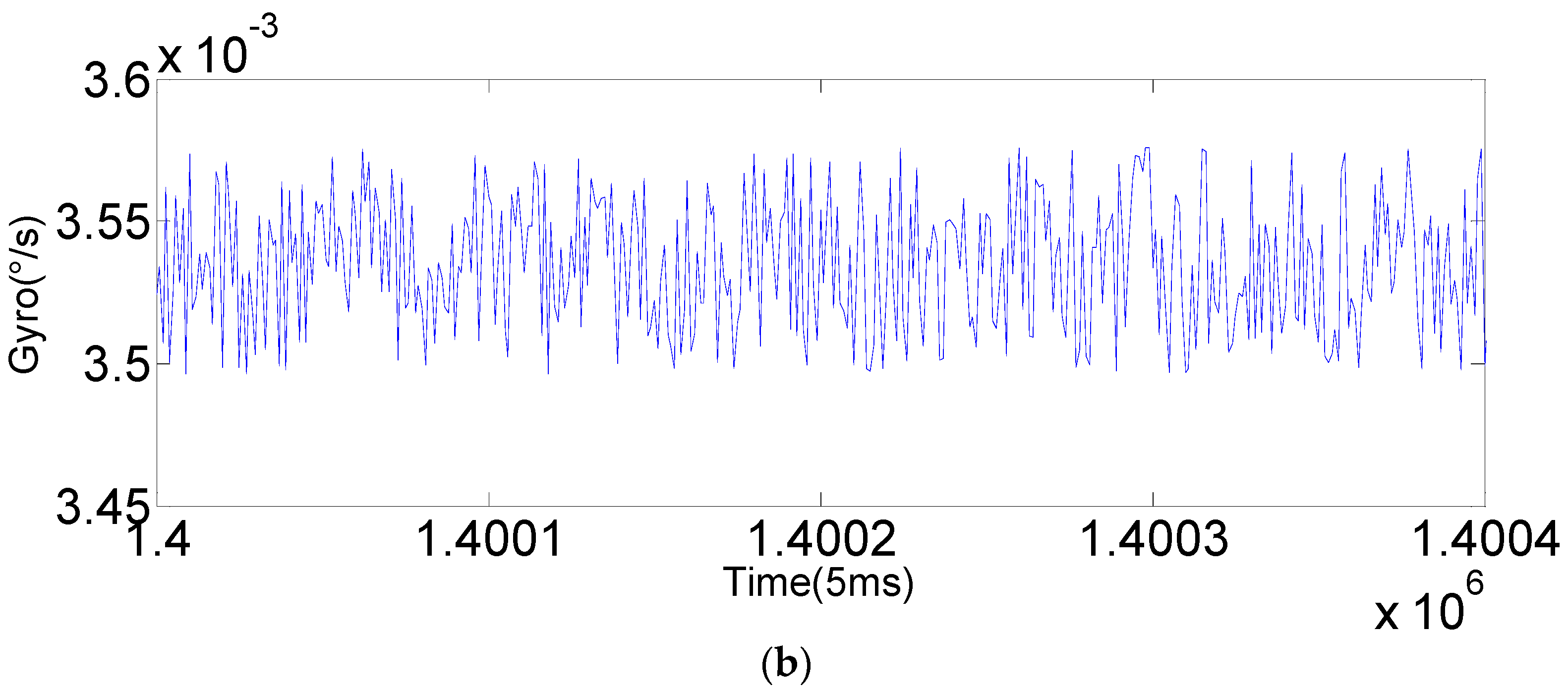
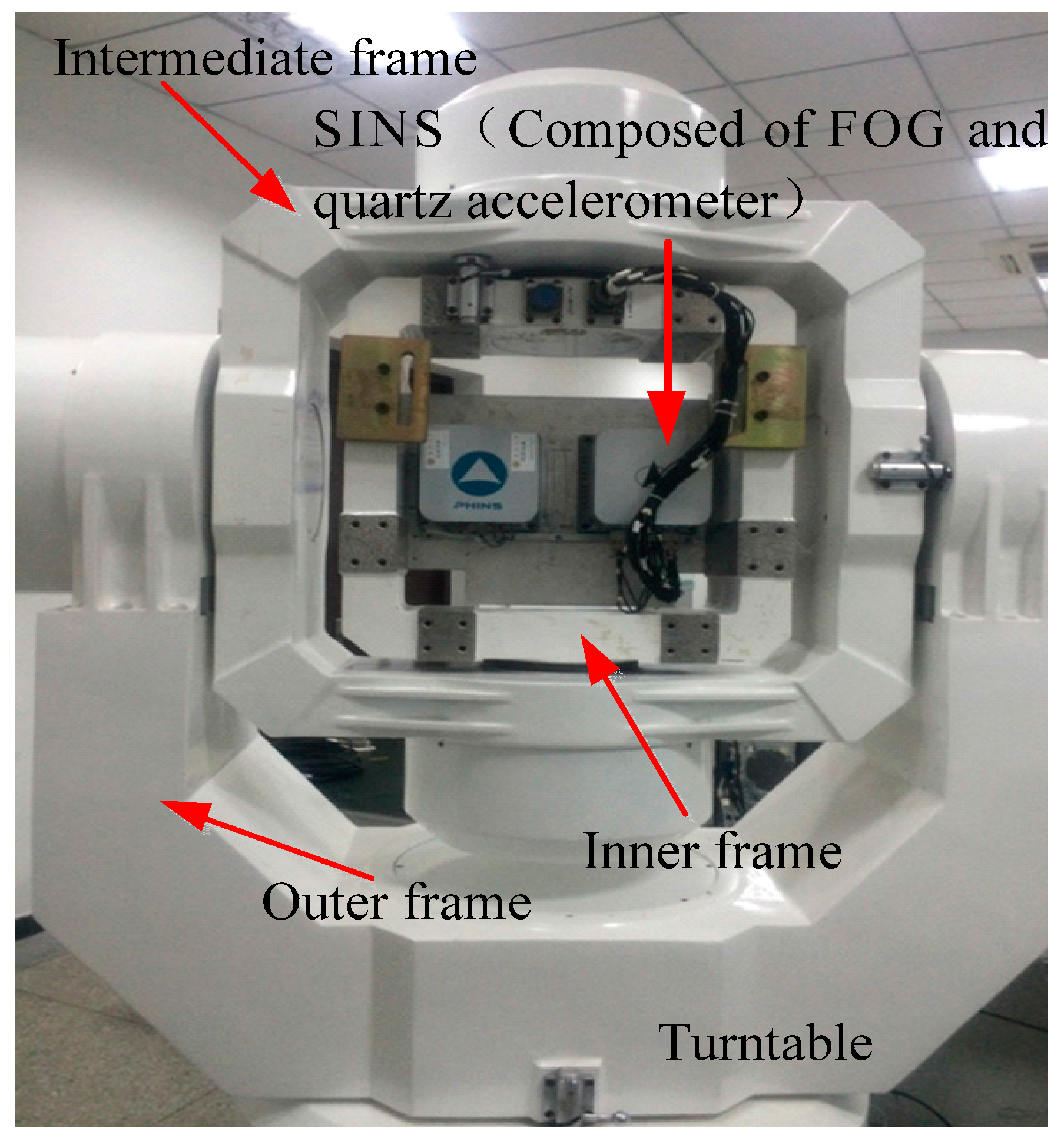
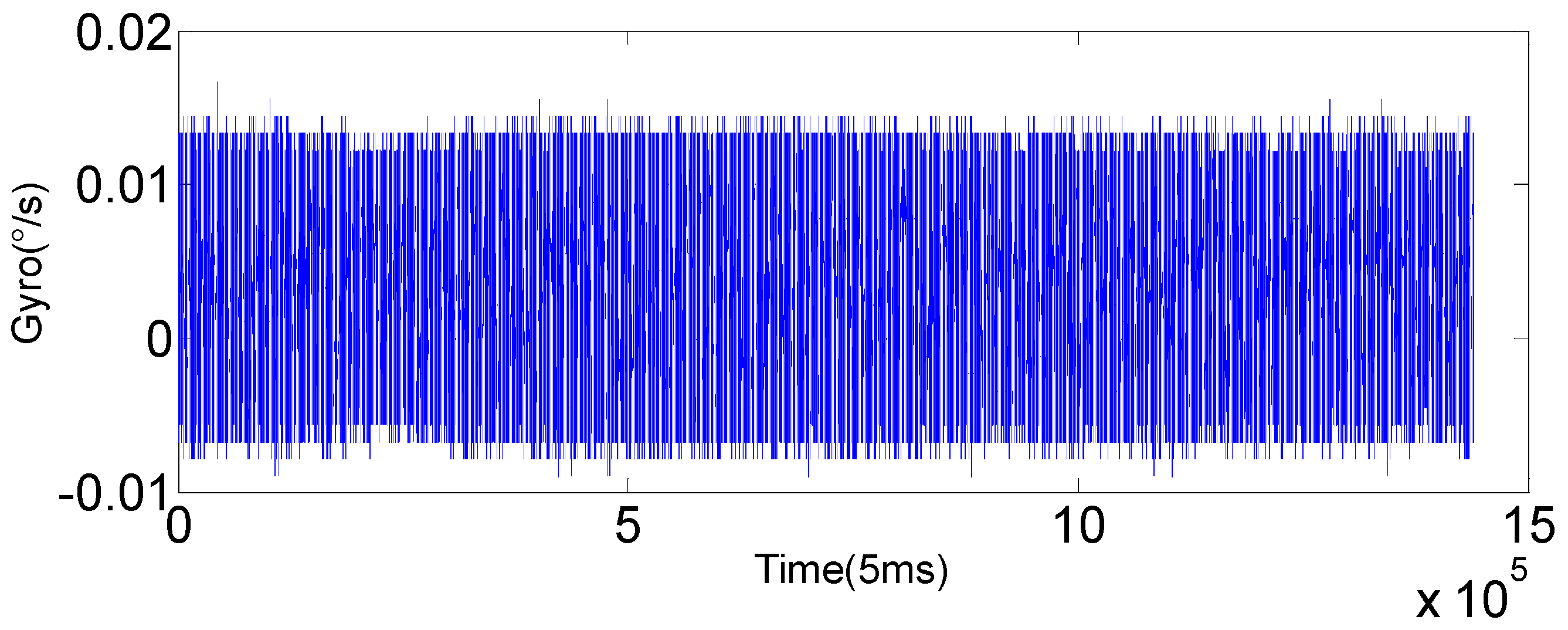
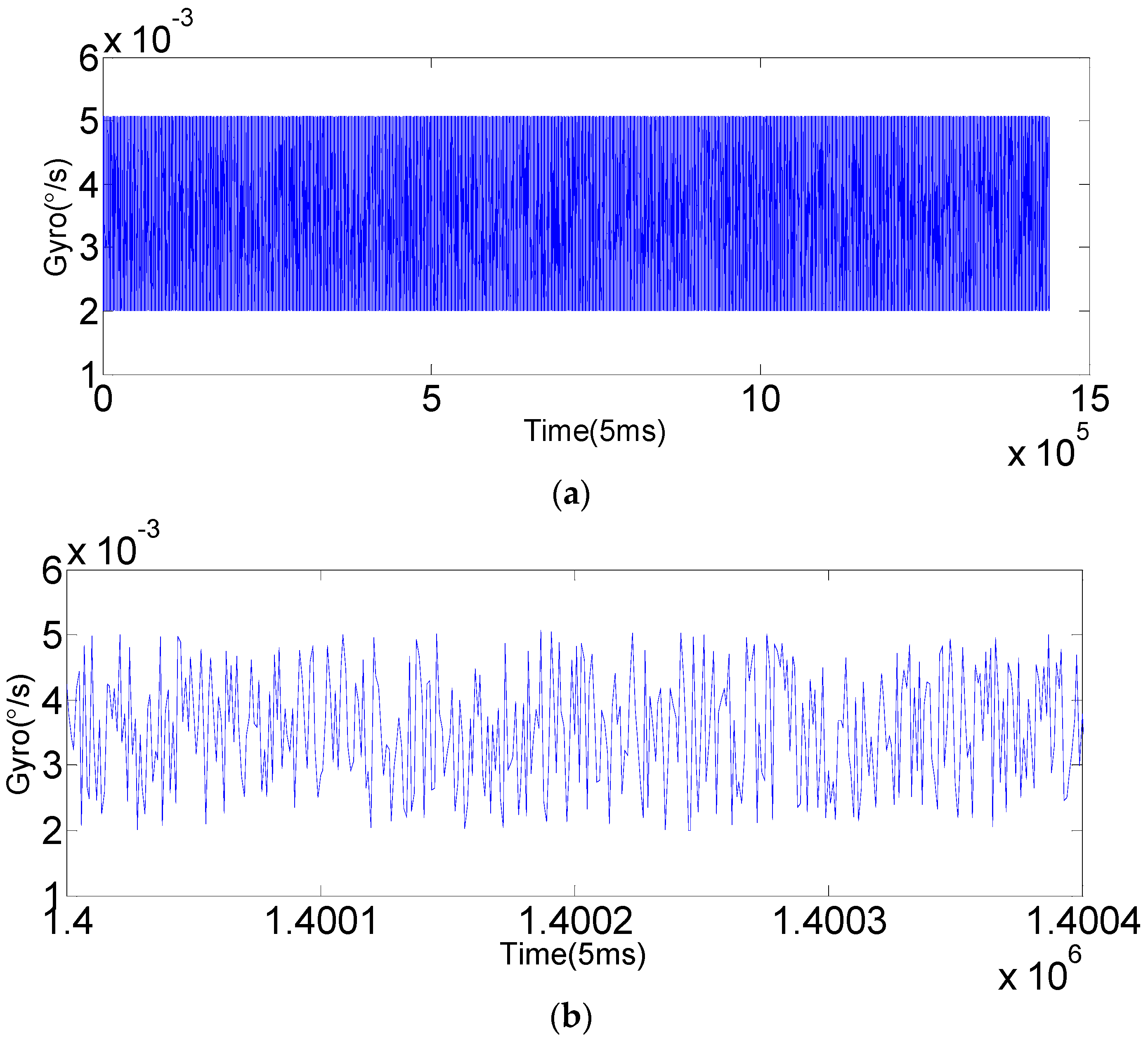
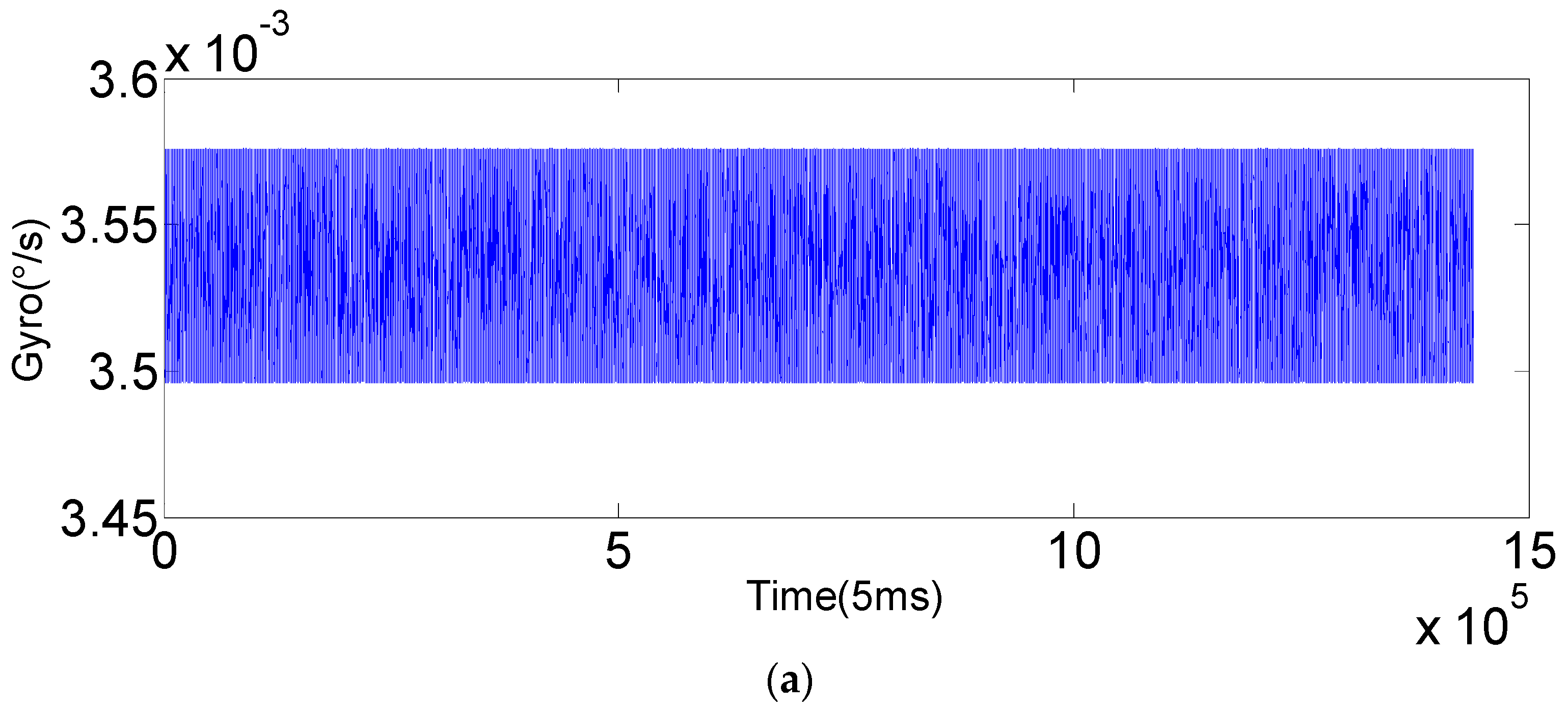
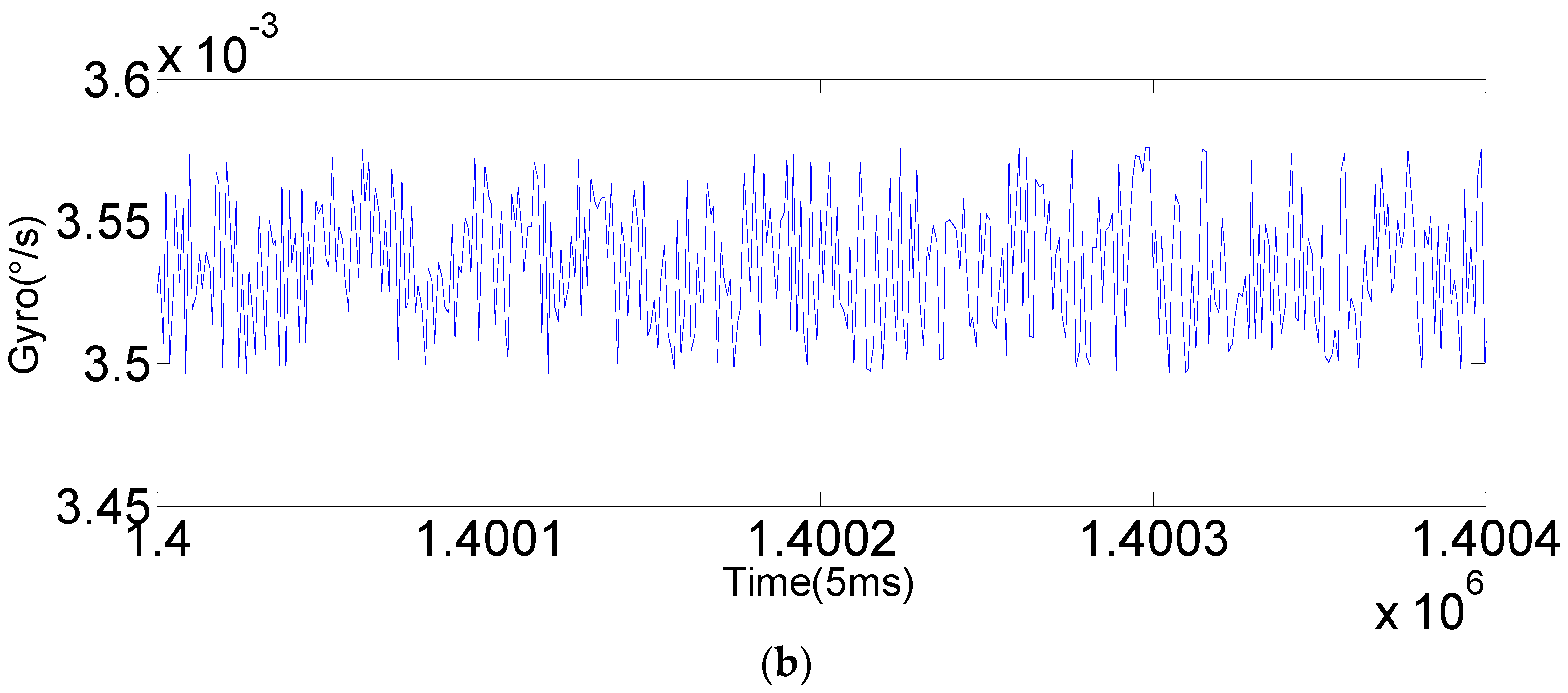
4.2. Static Experiment Results and Analysis
Allan Variance Analysis
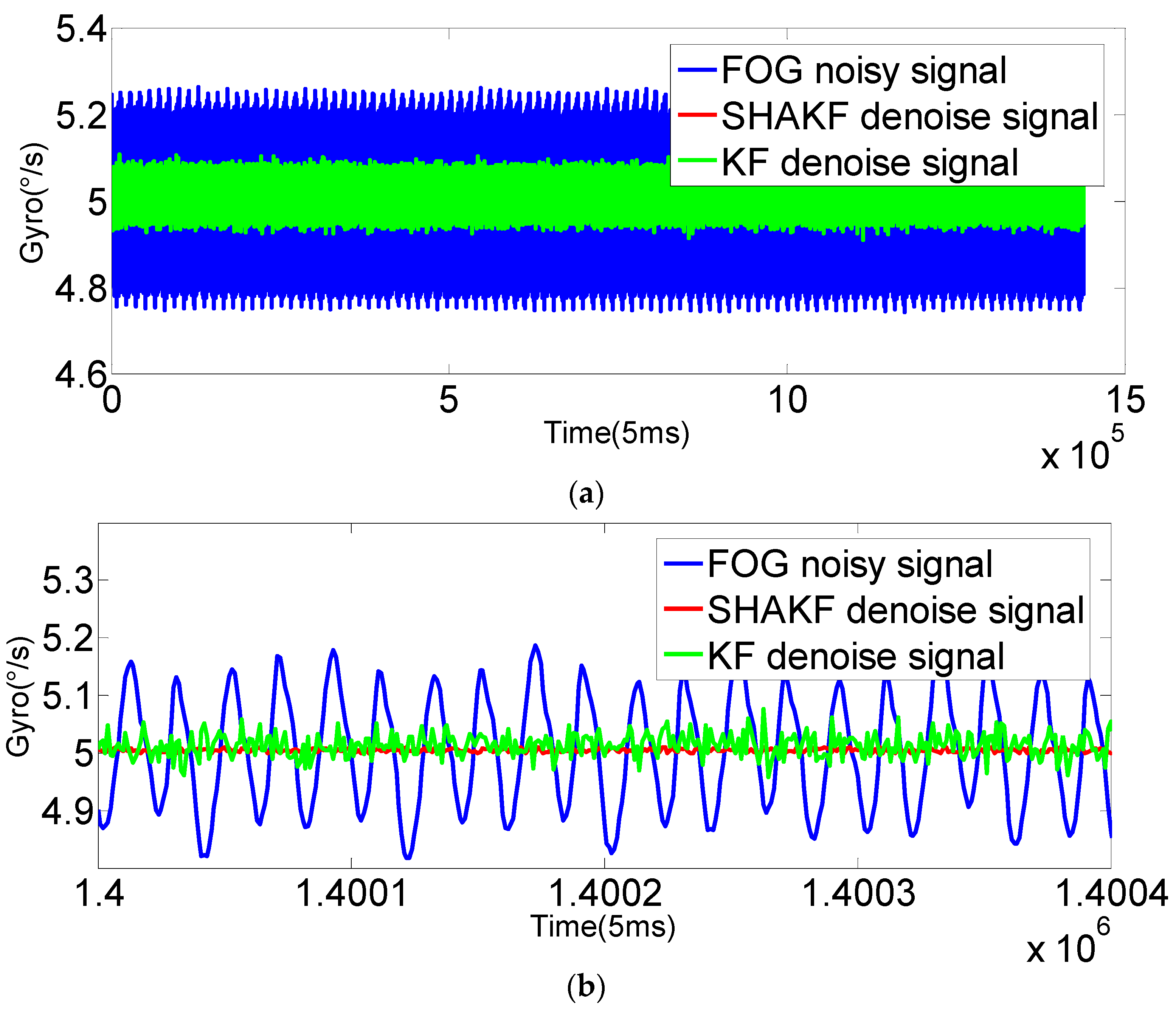
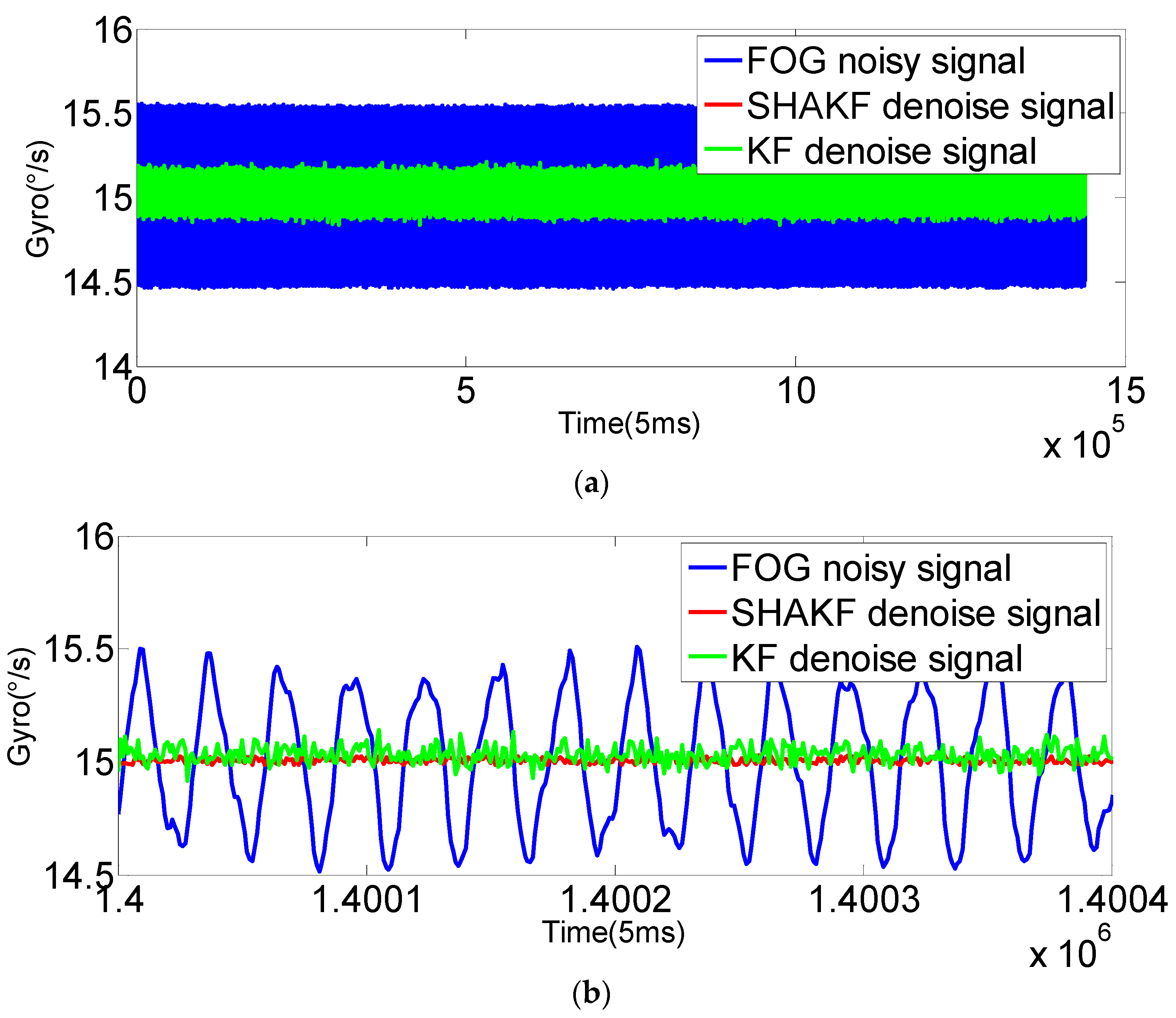
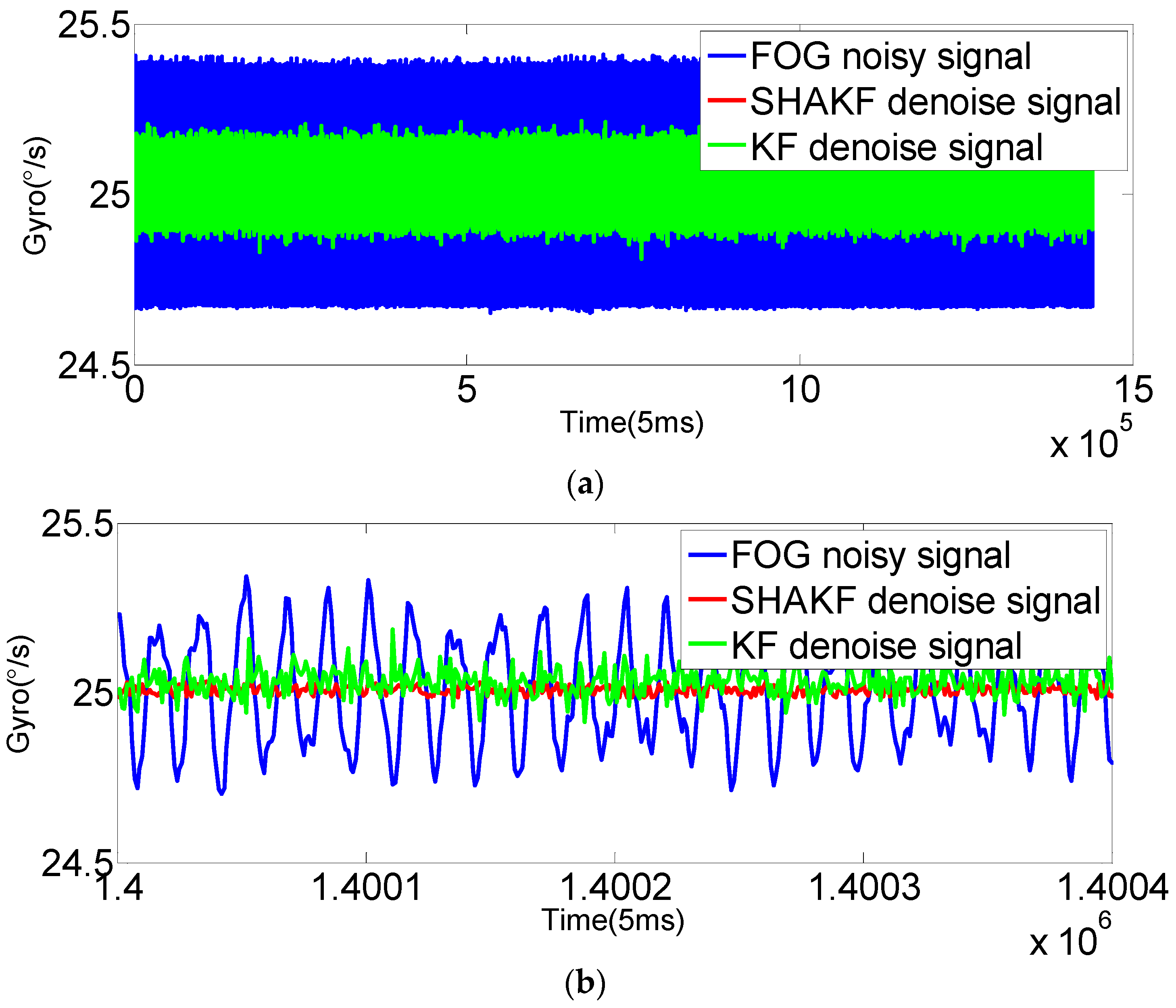
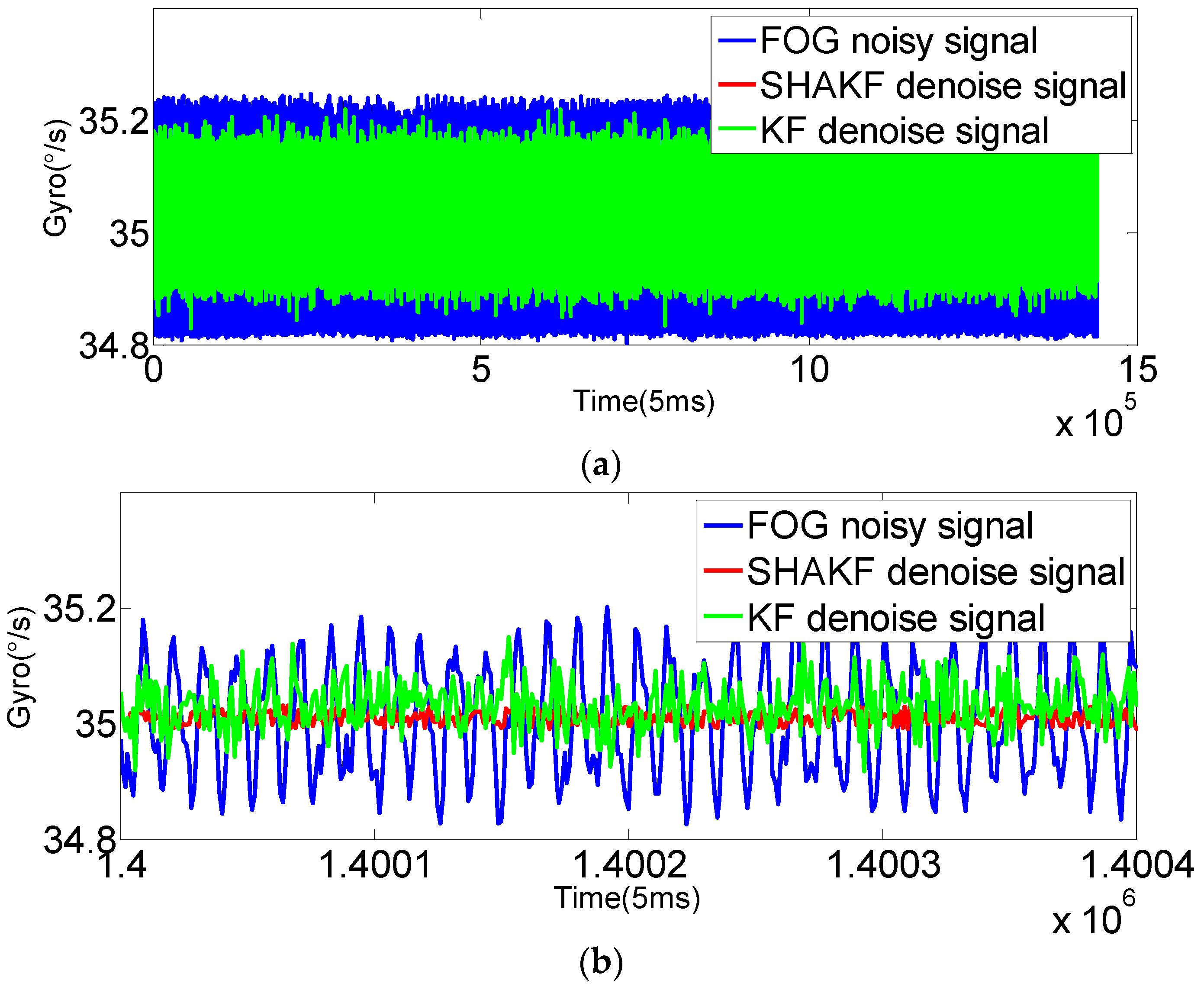
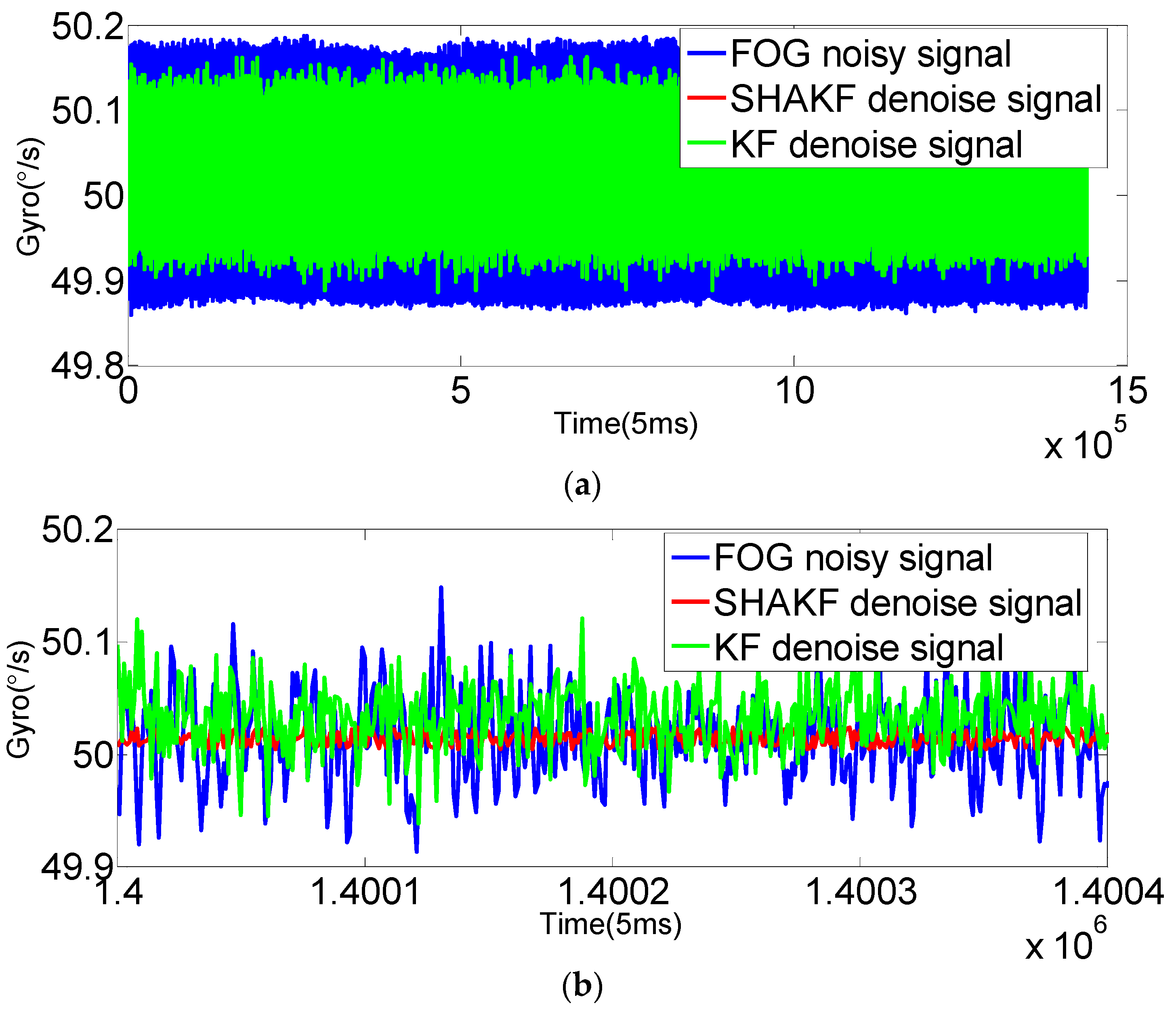
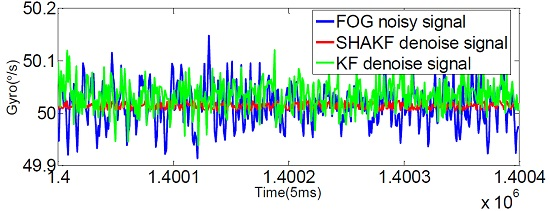
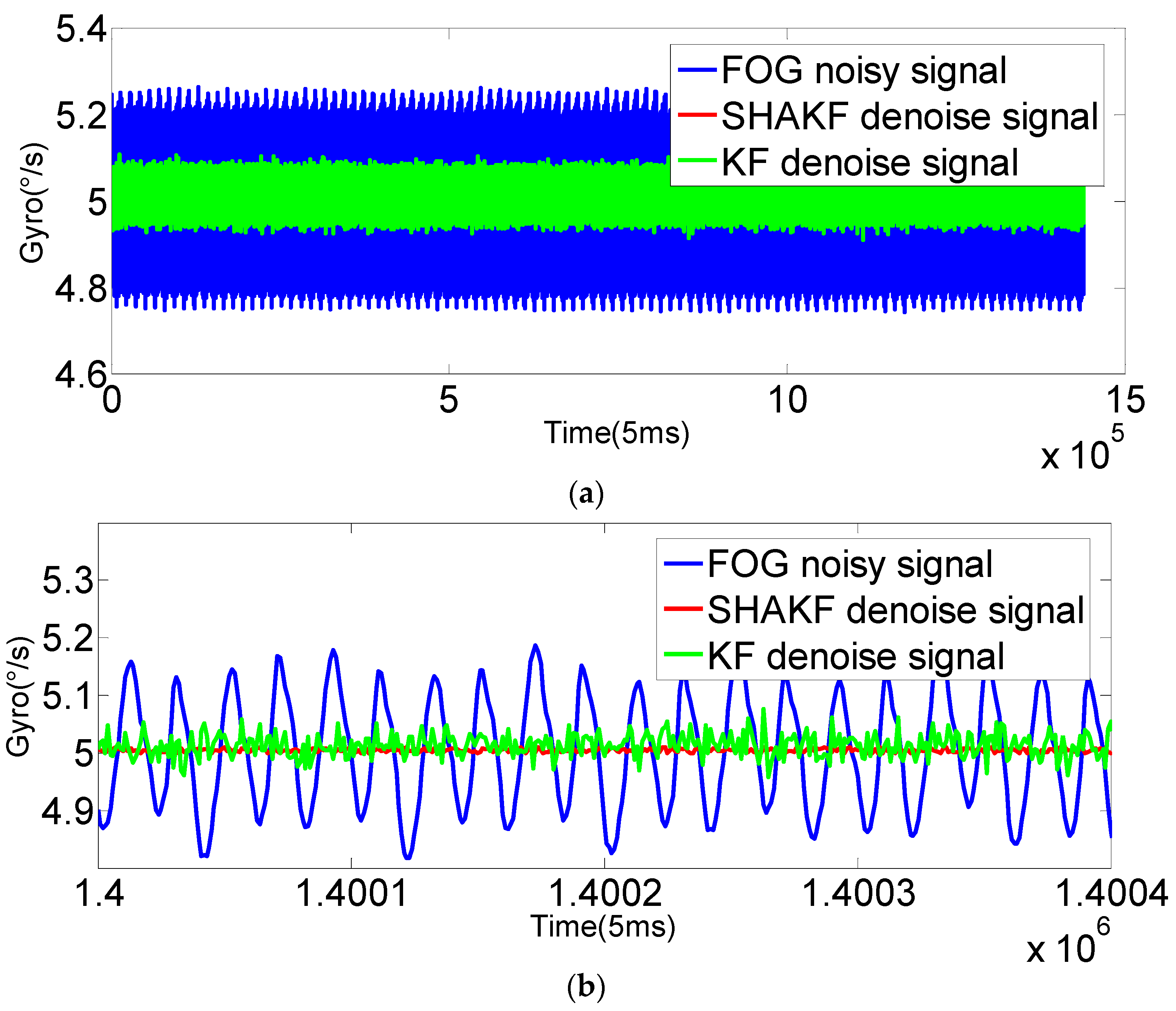
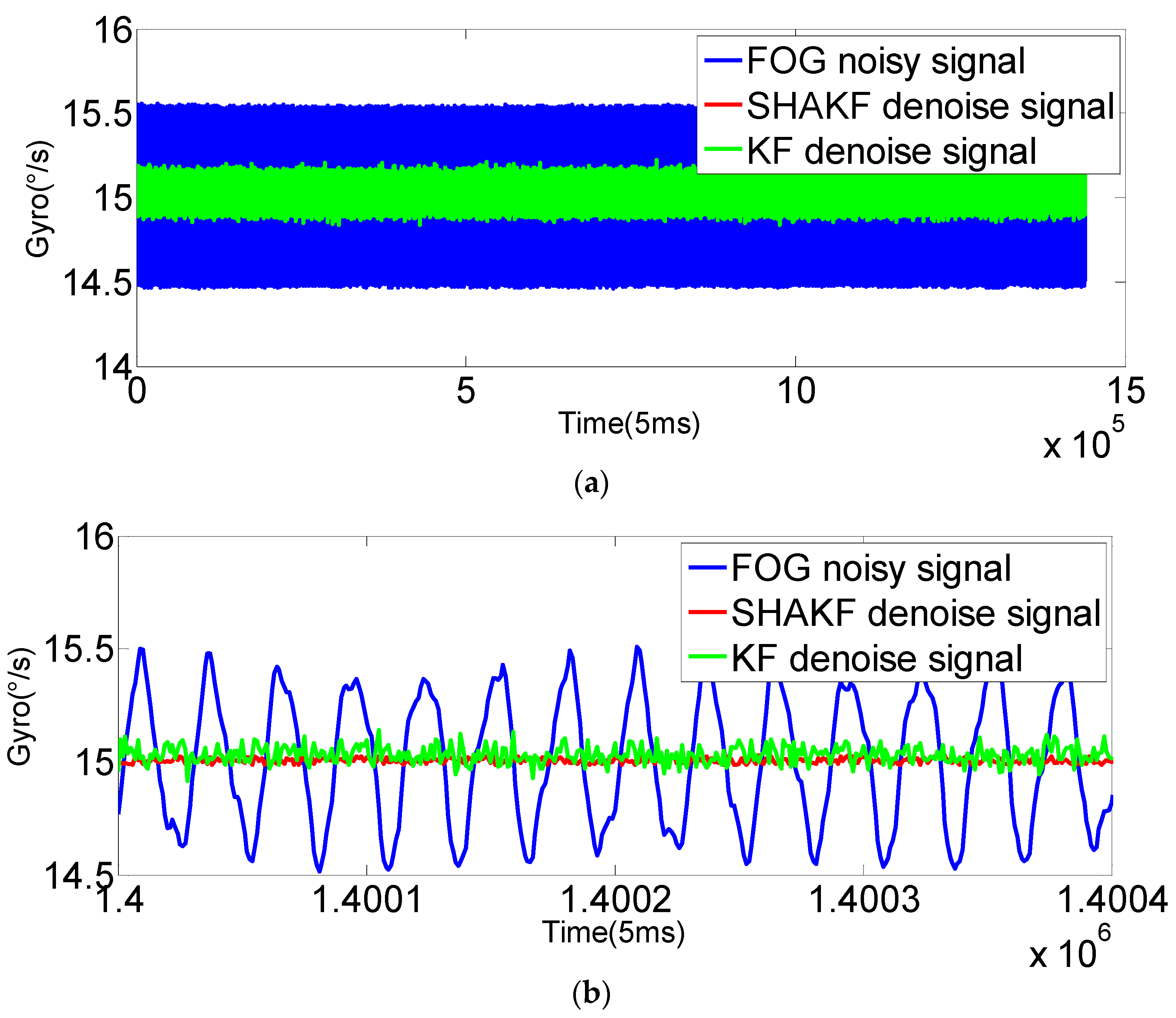
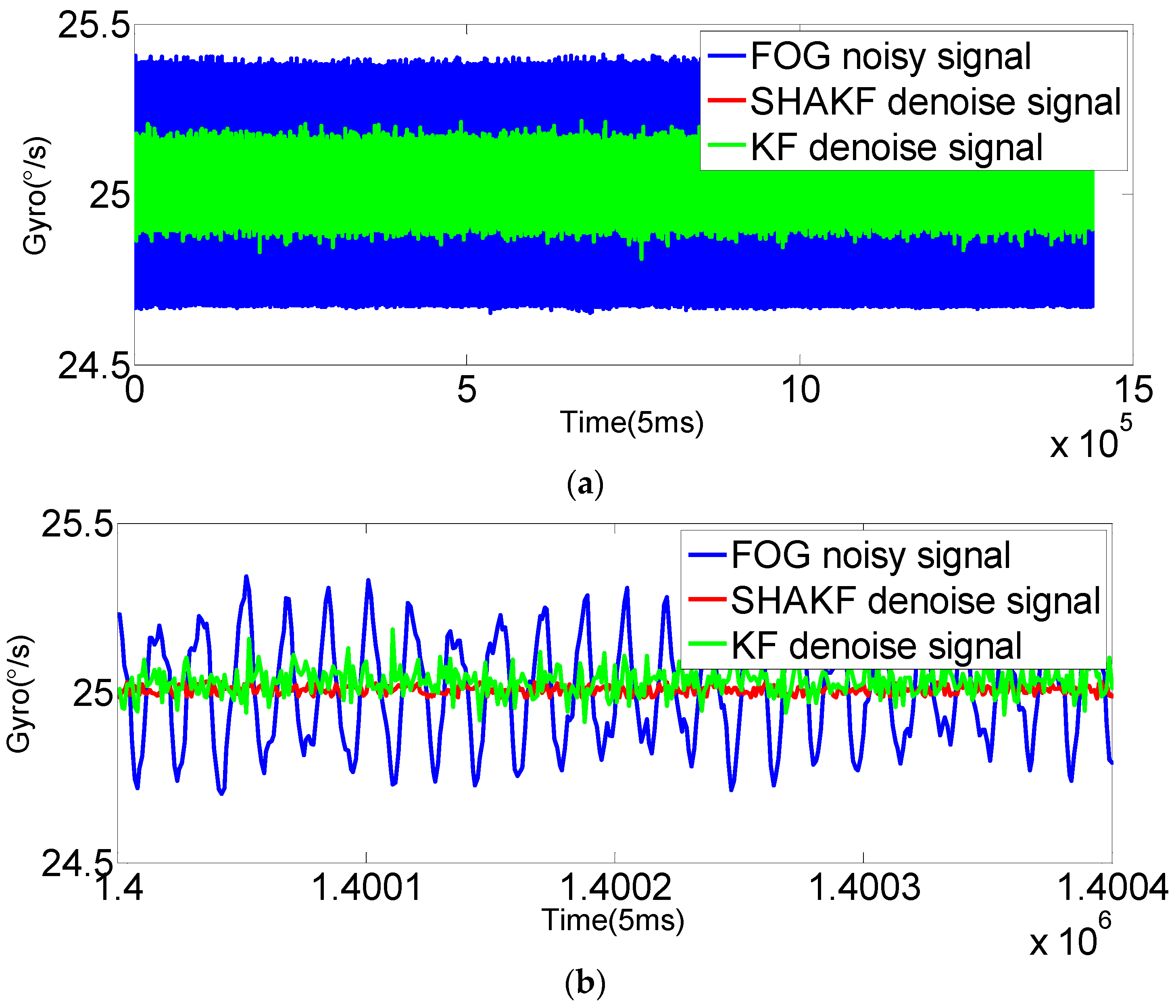
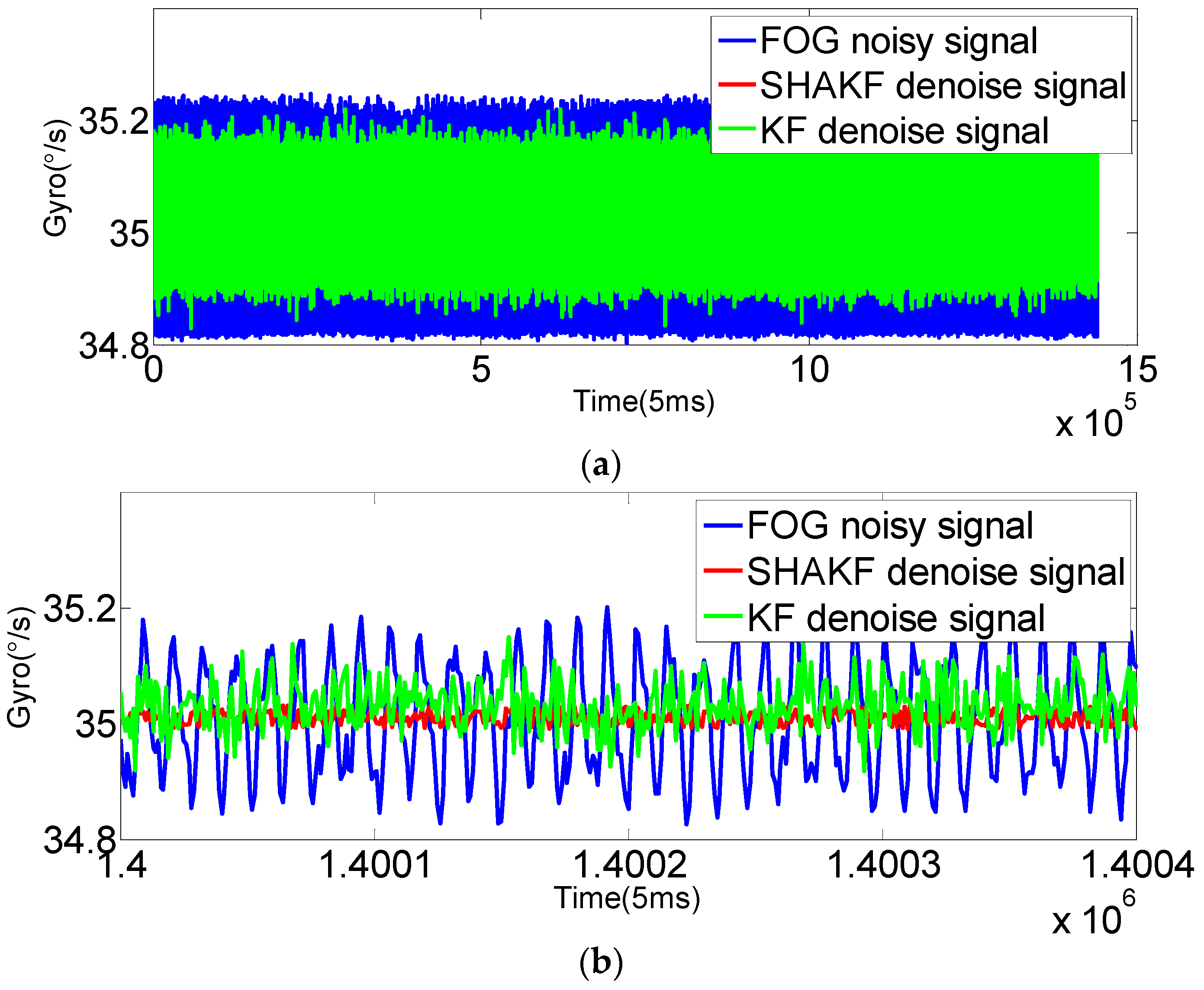
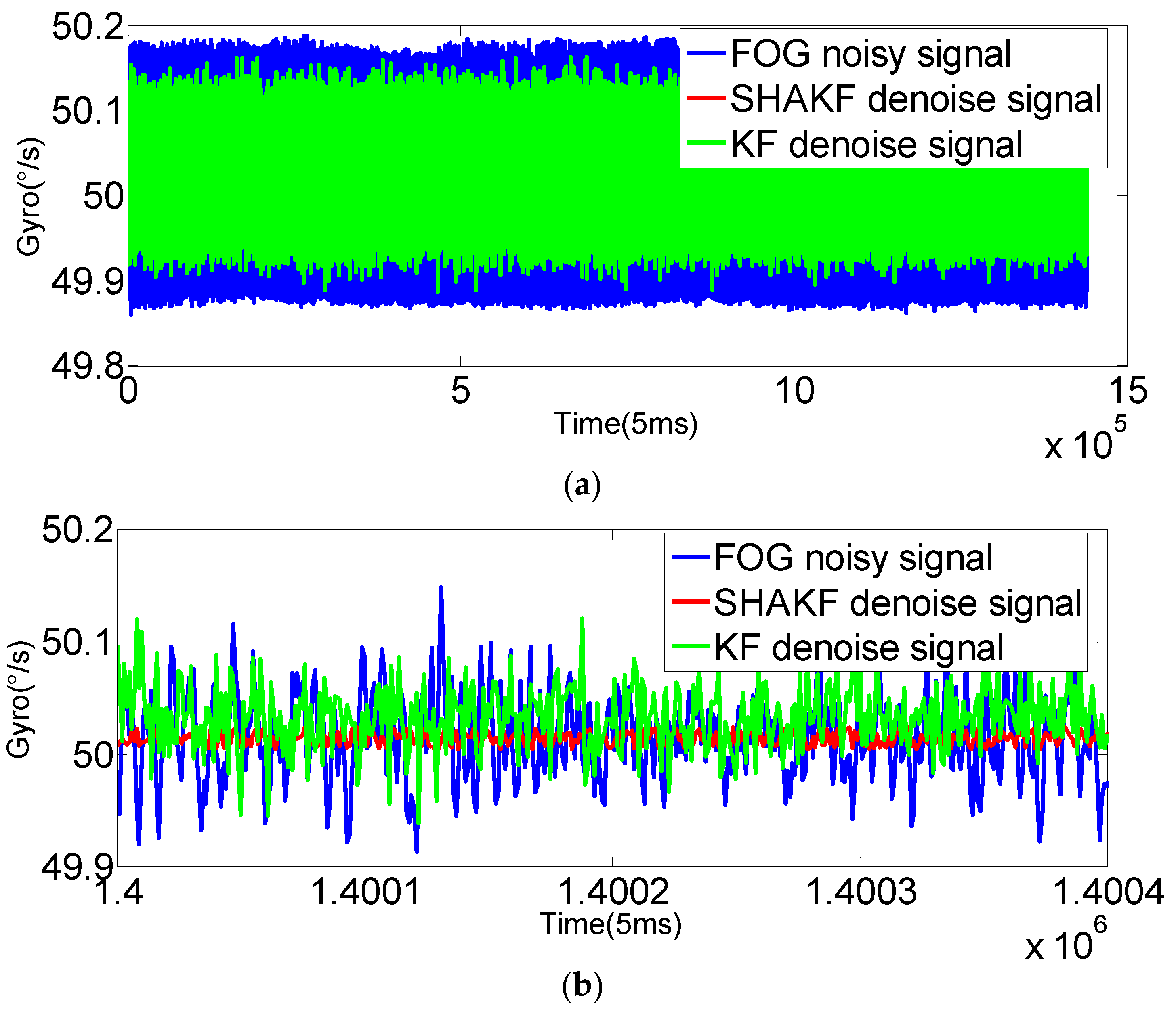
4.3. Dynamic Experiment Results and Analysis
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Bai, J.Q.; Zhang, K.; Wei, Y.X. Modeling and Analysis of Fiber Optic gyroscope Random Drifts. J. Chin. Inert. Technol. 2012, 5, 621–624. [Google Scholar]
- Wang, X.L.; Chen, T.; Du, Y. The Drift Method of Fiber Optic gyros Based on the ARMA Model. J. Proj. Rocket. Missiles Guid. 2006, 1, 5–11. [Google Scholar]
- Dang, S.W. Research on Signal Processing and Denoising Technique of Fiber Optic Gyroscope. Ph.D. Thesis, Shanghai Jiao Tong University, Shanghai, China, 2010. [Google Scholar]
- Li, J.T.; Zhang, C.X.; Zhang, X.Y. Modeling and Filtering of Fiber Optic gyroscope Random Drift. J. Modern. Electron. Technol. 2013, 2, 129–131. [Google Scholar]
- Huang, L. Auto Regressive Moving Average (ARMA) Modeling Method for Gyro Random Drift Error Using a Robust Kalman Filter. Sensors 2015, 10, 25277–25286. [Google Scholar] [CrossRef] [PubMed]
- Wang, L.; Zhang, C. On-line Modeling and Filter of High-Precise FOG Signal. J. Opt.-Electron. Eng. 2007, 1, 1–4. [Google Scholar]
- Jin, Y.; Wu, X.Z.; Xie, N.; Guo, C. Real-time Filtering Research Based on On-line Modeling Random Drift of FOG. J. Opt.-Electron. Eng. 2015, 3, 13–19. [Google Scholar]
- Wang, C. Research on Modeling, Analysis and Compensation of Fiber Optic Gyroscope Random Drift. Master’s Thesis, University of Science and Technology of China, Hefei, China, 2015. [Google Scholar]
- Yang, G.L.; Liu, Y.Y.; Li, M.; Song, S.G. AMA-and RWE-Based Adaptive Kalman Filter for Denoising Fiber Optic Gyroscope Drift Signal. Sensors 2015, 10, 26940–26960. [Google Scholar] [CrossRef] [PubMed]
- Han, J.L. Research on Error Analysis, Modeling and Filtering of FOG. Ph.D. Thesis, Harbin Institute of Technology, Harbin, China, 2008. [Google Scholar]
- Xiong, J.; Liu, J.-Y.; Lai, J.-Z.; Zheng, Z.-M. Identification approach for gyroscope ARIMA model based on Gaussian particle filter. J. Chin. Inert. Technol. 2010, 4, 493–497. [Google Scholar]
- Chen, J.J.; Yang, M.X. On-line modeling and real-time filtering of the FOG’s random drift. Opt. Tech. 2011, 4, 446–450. [Google Scholar]
- Wu, F.; Yang, Y. Gyroscope Random Drift Model Based on the Higher-order AR Model. J. Acta Geodaetica Cartogr. Sinica 2007, 4, 389–394. [Google Scholar]
- Liu, J.; Jiang, Y.; Ding, C. Based on Kalman Filter Processing of FOG Signal. J. Astronaut. 2009, 2, 604–608. [Google Scholar]
- Guo, L.; Wu, X.Z.; Jin, Y. Building model of the drift of the fiber optic gyroscope and application in the error equation of inertial navigation system. Opt. Technol. 2013, 39, 328–330. [Google Scholar]
- Kownacki, C. Optimization approach to adapt Kalman Filters for the real-time application of accelerometer and gyroscope signals’ filtering. Digit. Signal Process. 2011, 21, 131–140. [Google Scholar] [CrossRef]
- Zheng, Z.M.; Liu, J.Y.; Lai, J.Z.; Qian, W.X.; Zhu, Y.H. Filtering technique on FOG random drift error and its application. J. Data Acquis. Proc. 2009, 24, 6751–6754. [Google Scholar]
- Grewal, M.S. Kalman Filtering; Springer Press: Heidelberg, Germany, 2011; pp. 43–52. [Google Scholar]
- Liu, J.F.; Jiang, Y.; Ding, C.H. Random signal processing for fiber optic gyro based on Kalman filter. J. Astronaut. 2009, 30, 604–608. [Google Scholar]
- Shen, X.J.; Luo, Y.T.; Zhu, Y.M.; Song, E.B. Globally Optimal Distributed Kalman Filtering Fusion. J. Sci. Chin. Inf. Sci. 2012, 3, 512–529. [Google Scholar] [CrossRef]
- Sage, A.P.; Husa, W. Adaptive Filtering with Unknown Prior Statistics. In Proceedings of the Joint Automatic Control Conference, Washington, DC, USA, 22–24 June 1969; pp. 760–769.
- Li, J.L.; Xu, H.L.; He, J. Real-time Filtering Methods of Random Drift of Fiber Optic gyroscope. J. Astronaut. 2010, 31, 2717–2721. [Google Scholar]
- Yang, Y.; Gao, W. An Optimal Adaptive Kalman Filter. J. Geod. 2006, 4, 177–183. [Google Scholar] [CrossRef]
- Narasimhappa, M.; Rangababu, P.; Sabat, S.L.; Nayak, J. A modified Sage-Husa adaptive Kalman Filter for denoising fiber optic gyroscope signal. In Proceedings of the India Conference (INDICON), Kerala, India, 7–9 December 2012; pp. 1266–1271.
- Lu, P.; Zhao, L.; Chen, Z. Improved Sage-Husa Adaptive Filtering and Its Application. J. Syst. Simul. 2007, 15, 3503–3505. [Google Scholar]
- Xu, B.; Zhu, H.Q.; Ji, W.; Pan, W. Fiber Optic gyro Signal Random Drift Testing and Noise Error Analysis. In Proceedings of the 2010 3rd IEEE International Conference on Computer Science and Information Technology, Chengdu, China, 9–11 July 2010; pp. 189–192.
- Wang, X.L.; Du, Y.; Ding, Y.B. Investigation of random drift errormodel for fiber optic gyroscope. J. Beihang Univ. 2006, 7, 769–772. [Google Scholar]
- Tian, Y.P.; Yang, X.J.; Guo, Y.Z.; Liu, F. Filtering and Analysis on the Random Drift of FOG. In Proceedings of the Applied Optics and Photonics China (AOPC2015), Beijing, China, 5–7 May 2015.
- Miao, Z.Y.; Shen, F.; Xu, D.J.; He, K.P.; Tian, C.M. Online Estimation of Allan Variance Coefficients Based on a Neural-Extended Kalman Filter. Sensors 2015, 15, 2496–2524. [Google Scholar] [CrossRef] [PubMed]
- Li, J.T.; Fang, J.C. Sliding Average Allan Variance for Inertial Sensor Stochastic Error. IEEE Trans. Instrum. Meas. 2013, 62, 3291–3300. [Google Scholar] [CrossRef]
- Ford, J.J.; Evans, M.E. On-Line Estimation of Allan Variance Parameters. Inf. Decis. Control 1999, 57, 439–444. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Error Coefficients (Unit) | Original Signal | Fitting Sequence | Kalman Filtering | SHAKF |
|---|---|---|---|---|
| 4.2026 × 10−6 | 3.9168 × 10−6 | 3.2547 × 10−6 | 2.0632 × 10−6 | |
| 7.1221 × 10−4 | 7.0438 × 10−4 | 6.1221 × 10−4 | 3.5235 × 10−4 | |
| 0.0335 | 0.0334 | 0.0246 | 0.0162 | |
| 0.5401 | 0.5390 | 0.4286 | 0.2636 | |
| 1.1565 × 10−5 | 1.1195 × 10−5 | 9.4795 × 10−6 | 5.4532 × 10−6 |
| Rotation (°/s) | FOG Signal (°/s) | KF Denoised Signal (°/s) | SHAKF Denoised Signal (°/s) |
|---|---|---|---|
| 5 | 0.1068 | 0.0362 | 0.0184 |
| 15 | 0.2461 | 0.0932 | 0.0396 |
| 25 | 0.1629 | 0.1086 | 0.0280 |
| 35 | 0.0844 | 0.0637 | 0.0145 |
| 50 | 0.0538 | 0.0445 | 0.0093 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, J.; Xu, X.; Liu, Y.; Zhang, T.; Li, Y. FOG Random Drift Signal Denoising Based on the Improved AR Model and Modified Sage-Husa Adaptive Kalman Filter. Sensors 2016, 16, 1073. https://doi.org/10.3390/s16071073
Sun J, Xu X, Liu Y, Zhang T, Li Y. FOG Random Drift Signal Denoising Based on the Improved AR Model and Modified Sage-Husa Adaptive Kalman Filter. Sensors. 2016; 16(7):1073. https://doi.org/10.3390/s16071073
Chicago/Turabian StyleSun, Jin, Xiaosu Xu, Yiting Liu, Tao Zhang, and Yao Li. 2016. "FOG Random Drift Signal Denoising Based on the Improved AR Model and Modified Sage-Husa Adaptive Kalman Filter" Sensors 16, no. 7: 1073. https://doi.org/10.3390/s16071073