
Experimental Validation of a Compound Control Scheme for a Two-Axis Inertially Stabilized Platform with Multi-Sensors in an Unmanned Helicopter-Based Airborne Power Line Inspection System

Abstract
:1. Introduction
2. Background Analysis
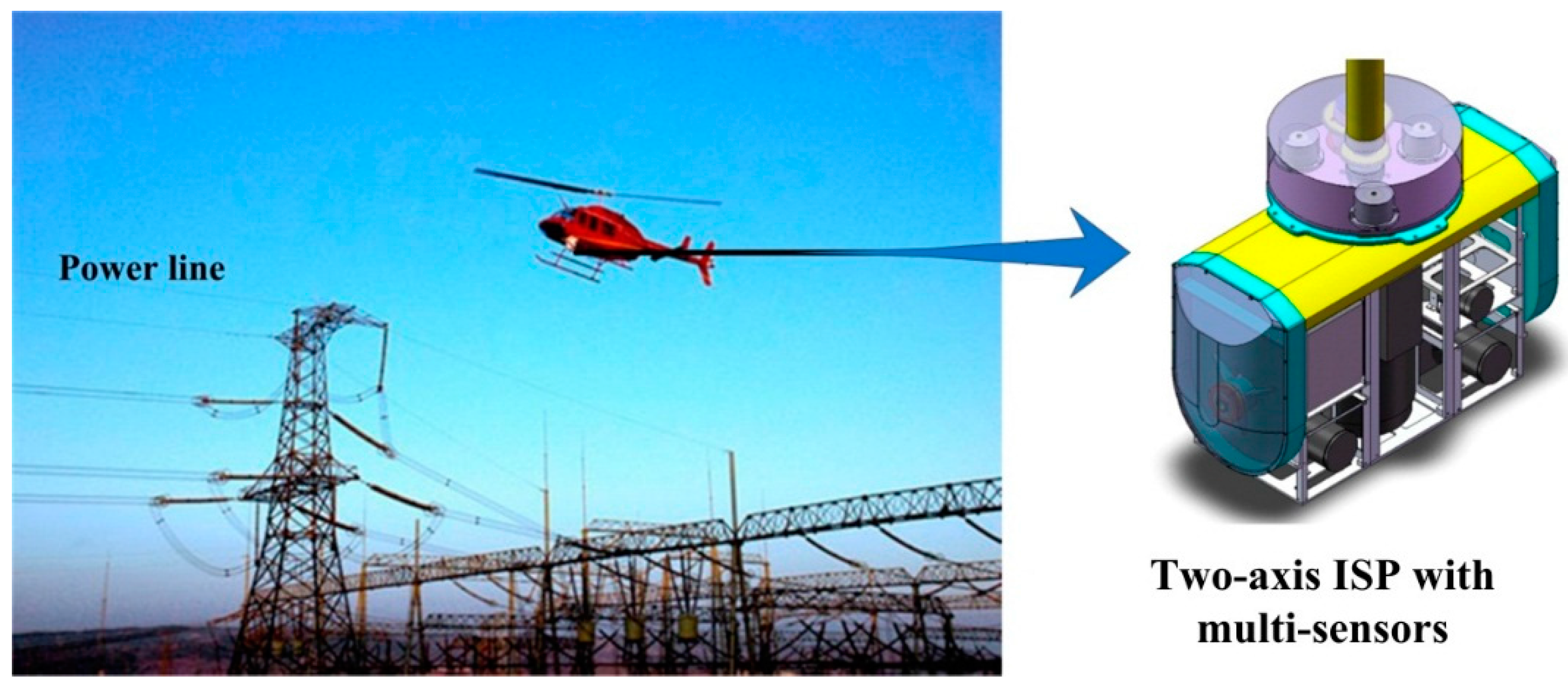
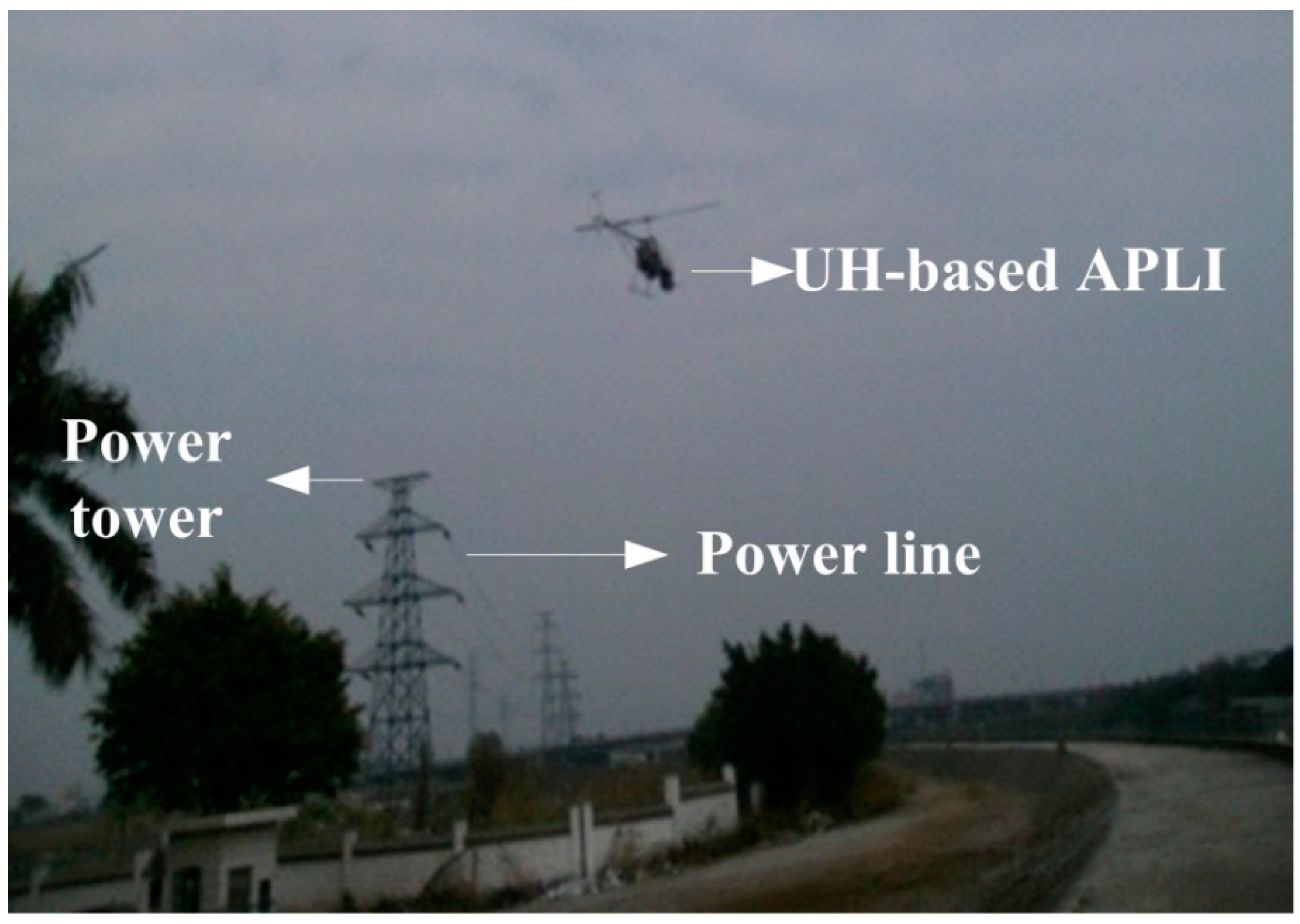
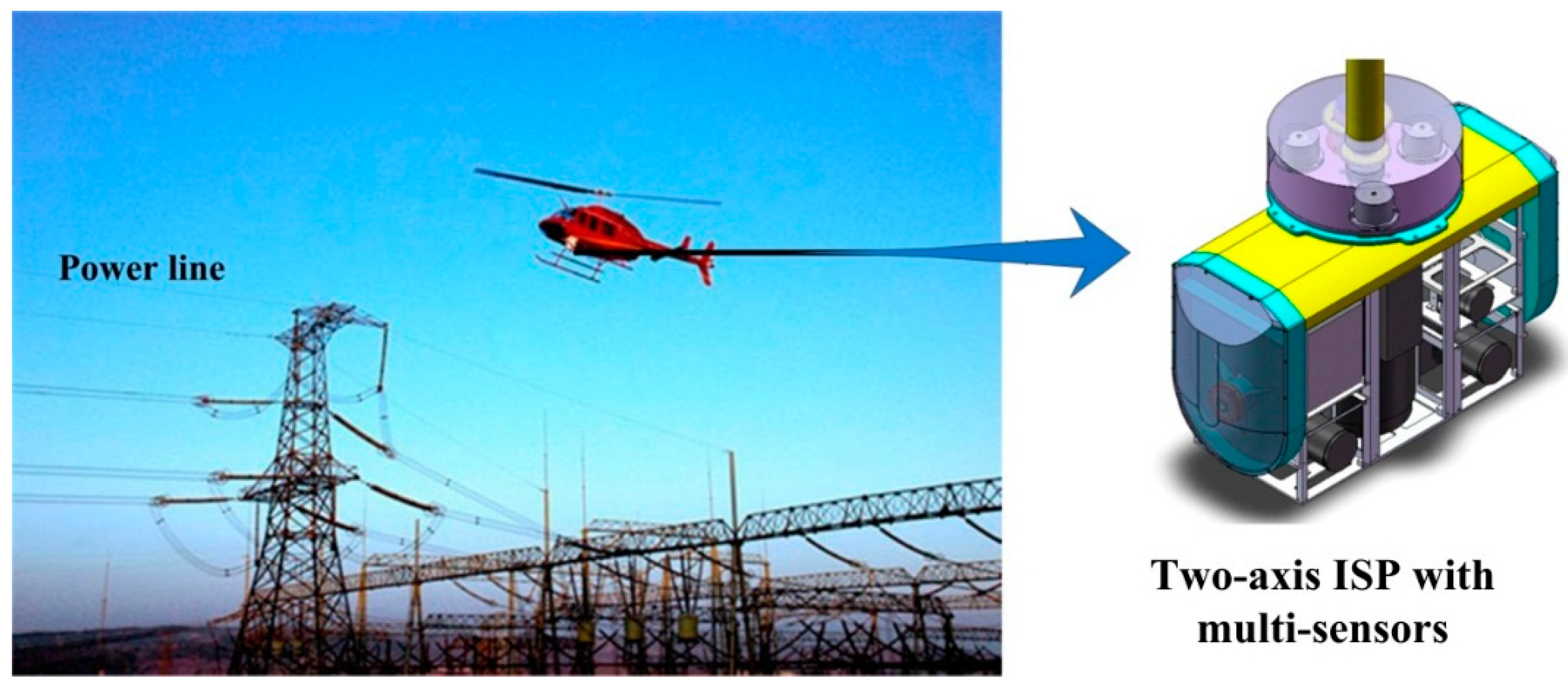
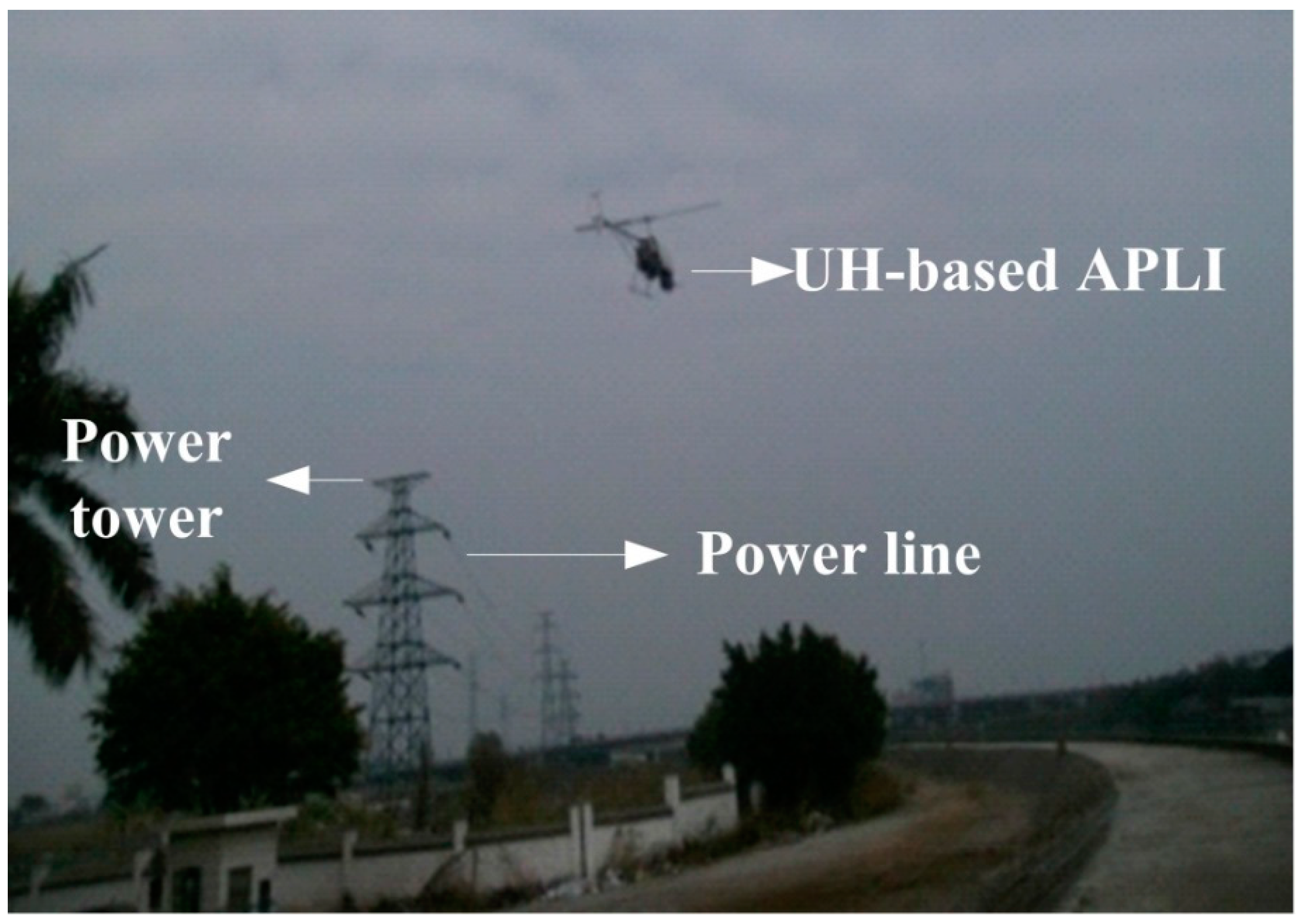
2.1. APLI System
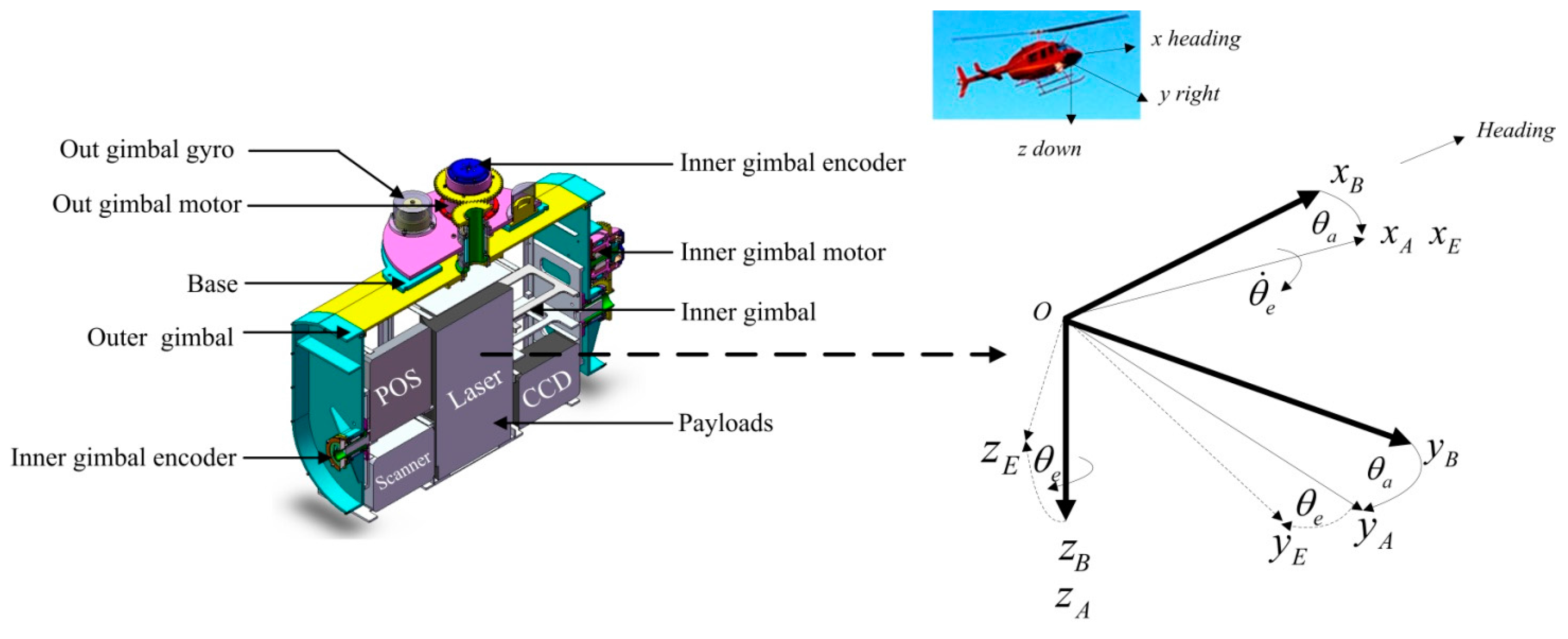
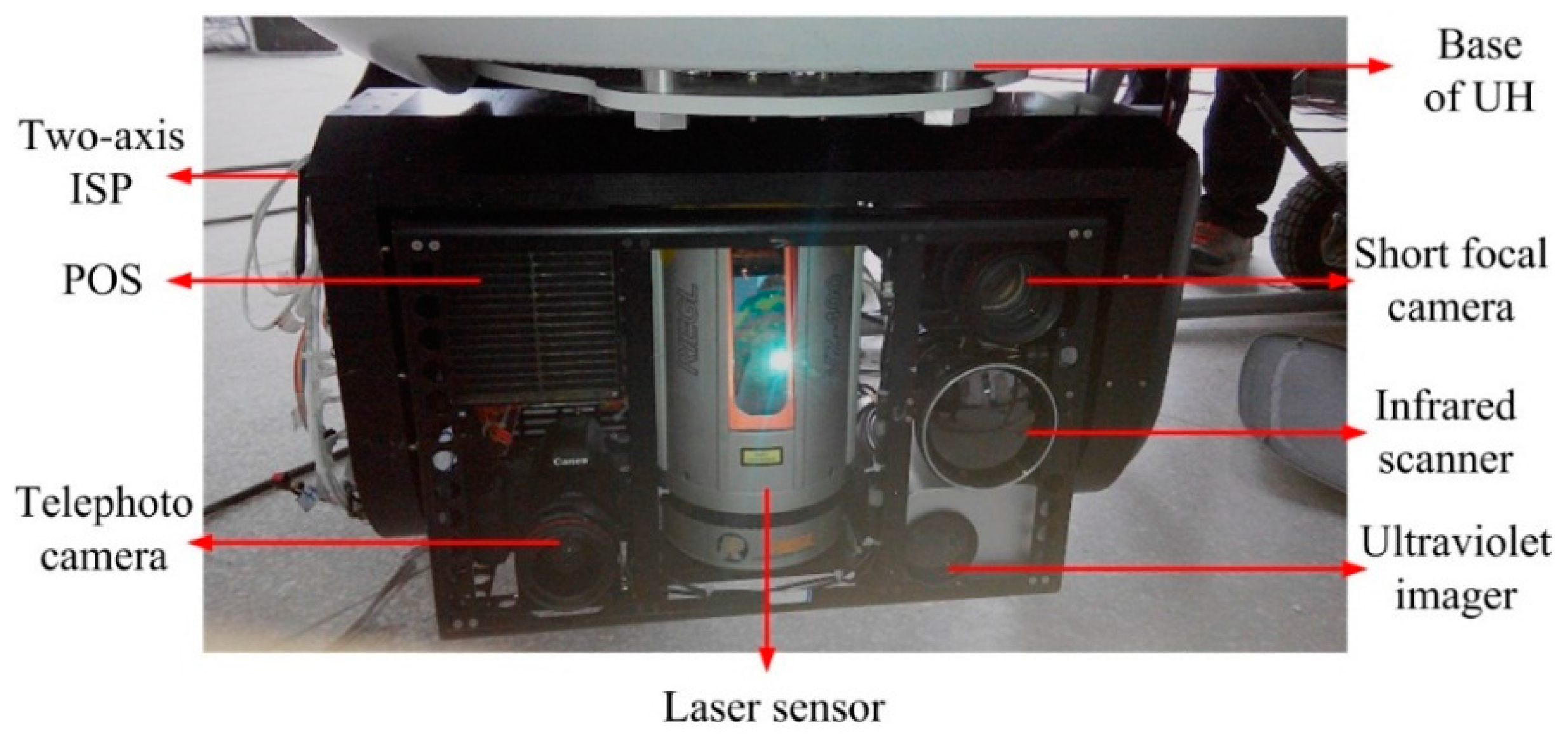
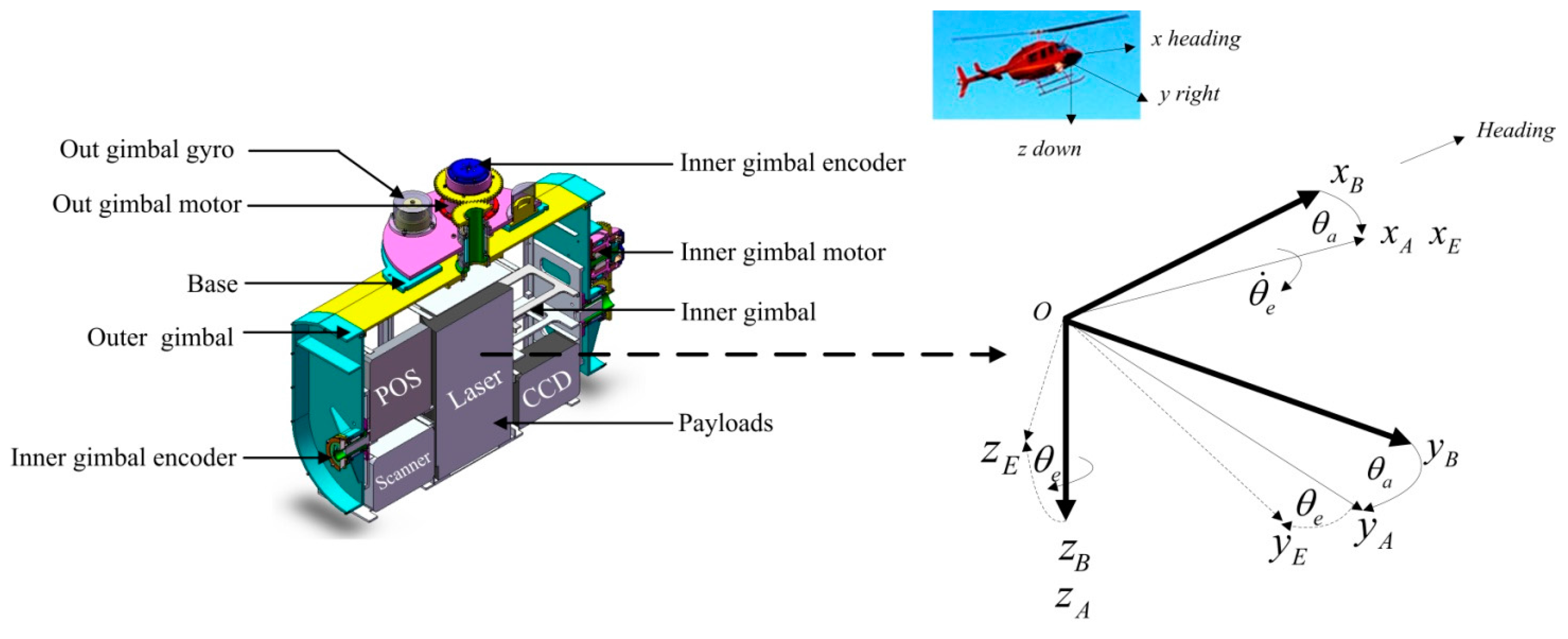
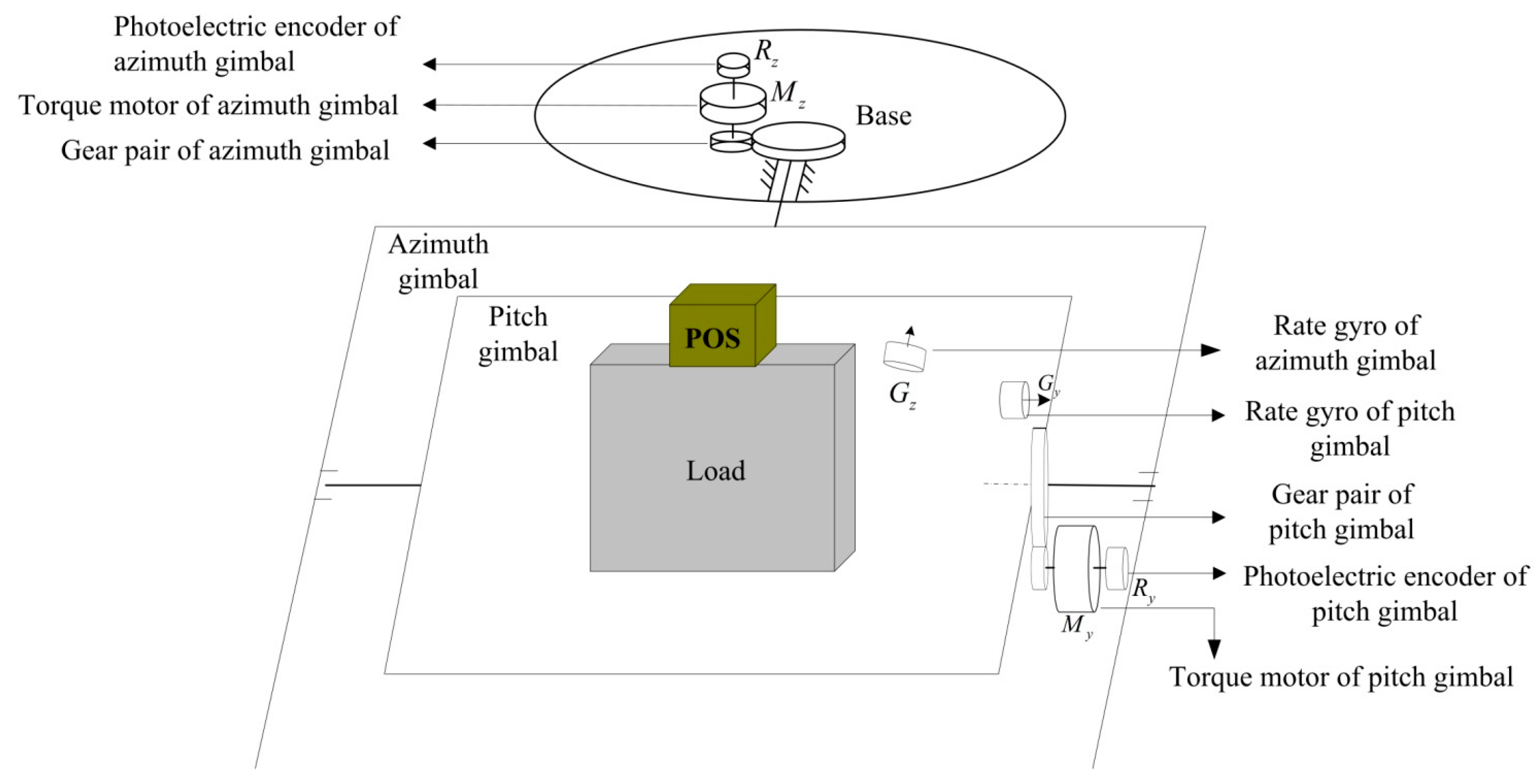
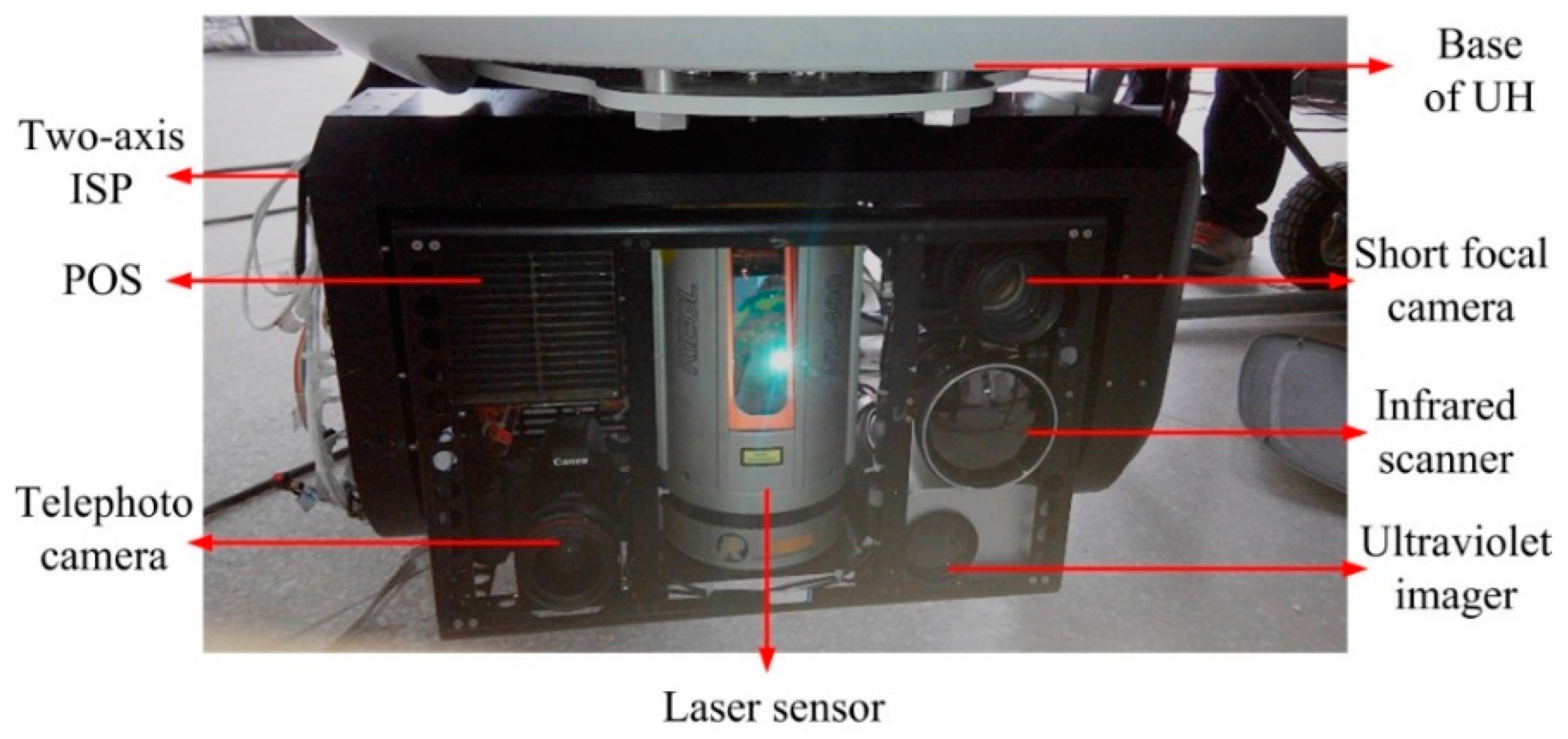
2.2. Structure of Two-Axis ISP System
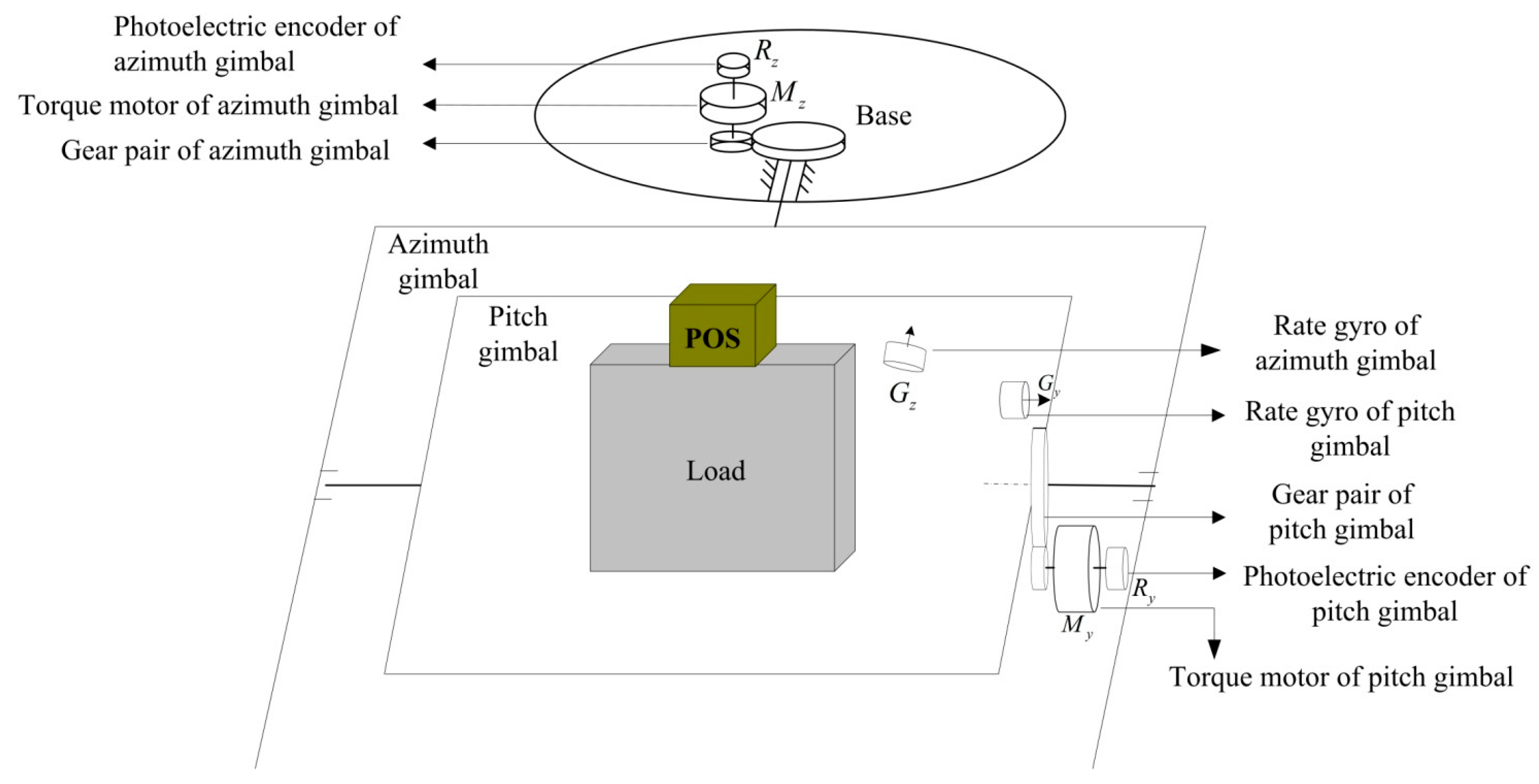
2.3. Working Principle of Two-Axis ISP System
3. Control Scheme of Two-Axis ISP
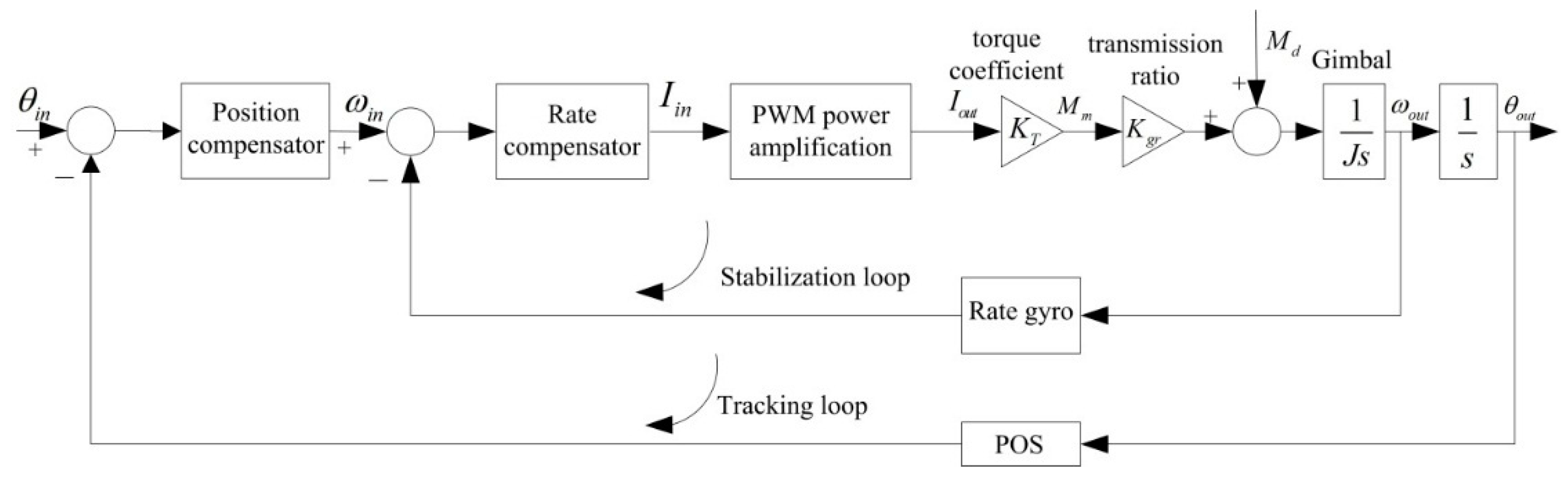
3.1. The Traditional Dual Closed-Loop Control Structure
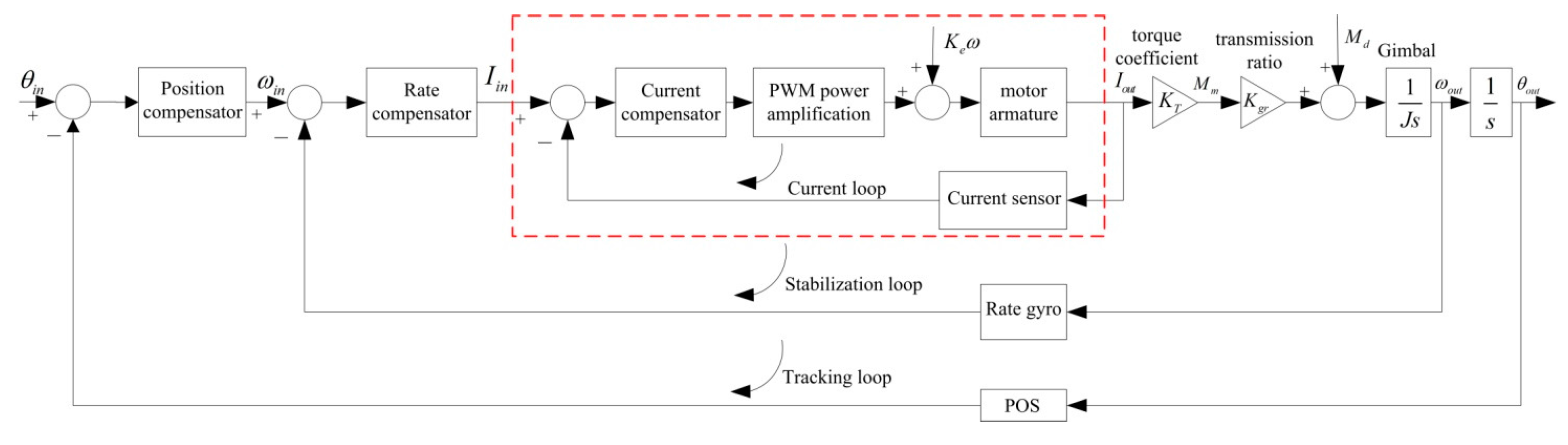
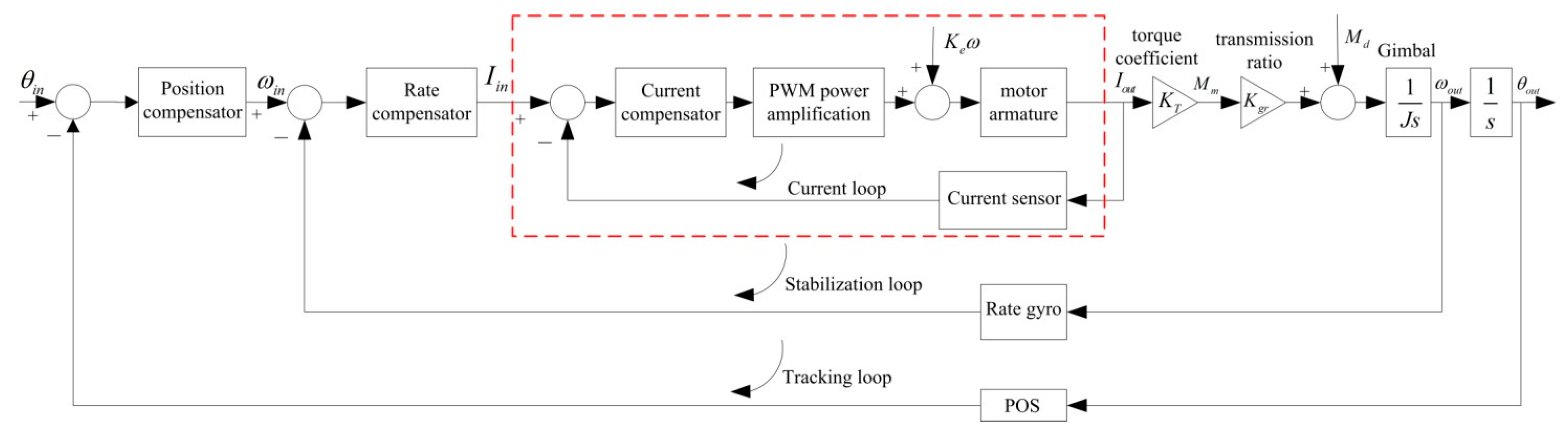
3.2. The Three Closed-Loop Compound Control Structure
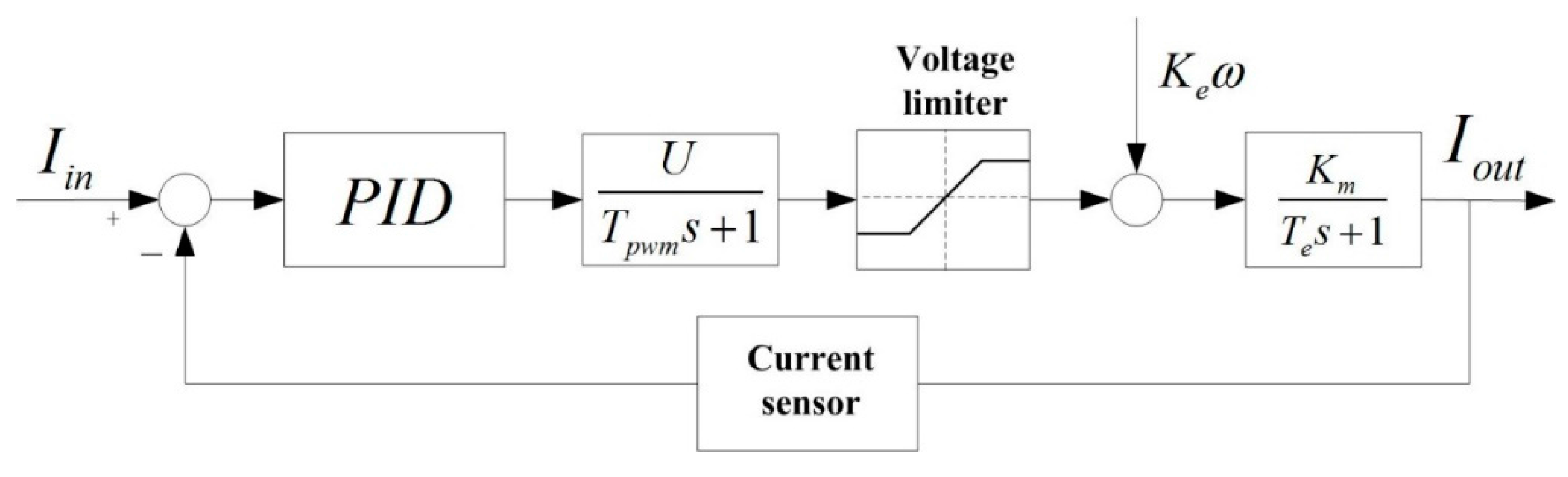
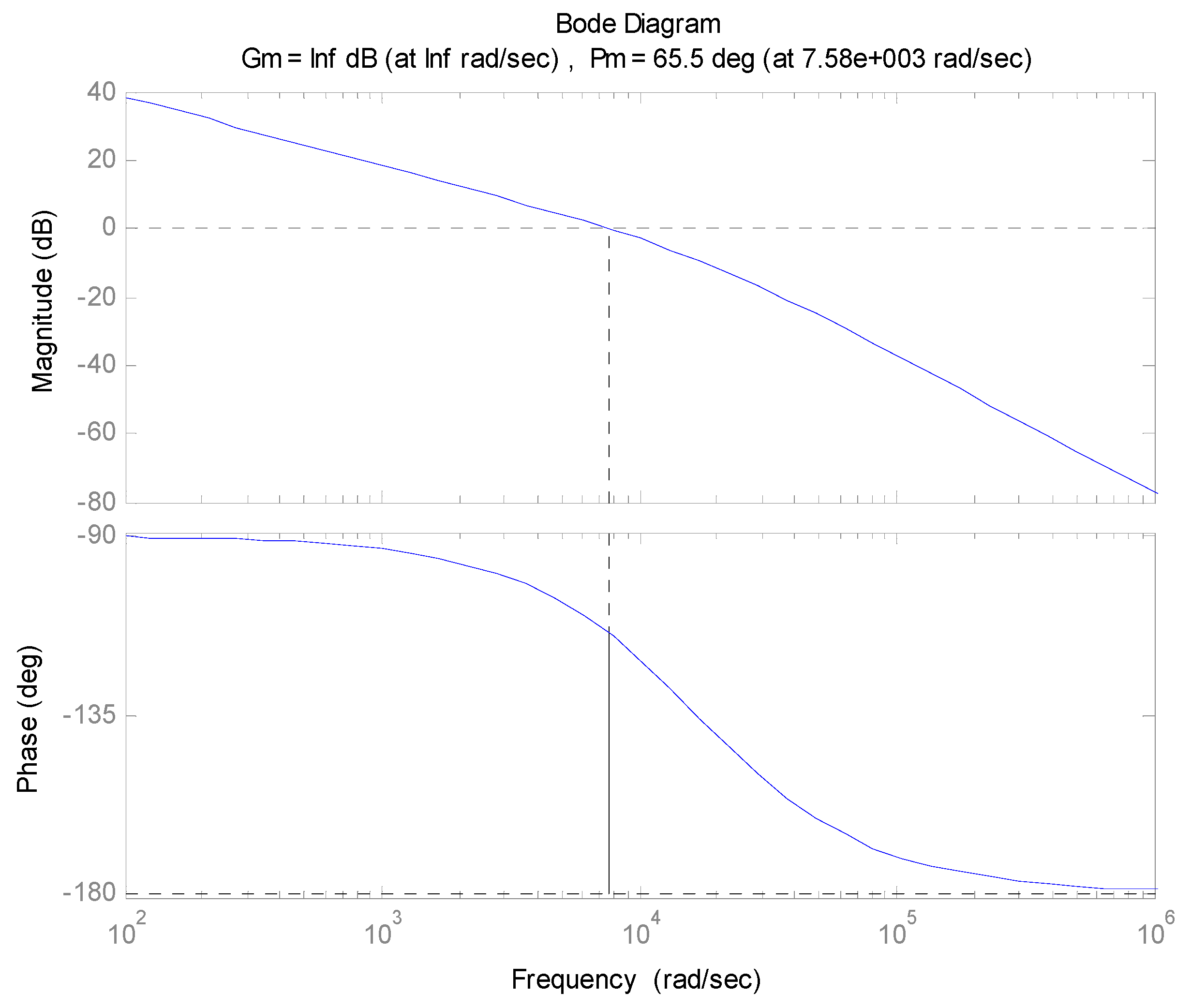
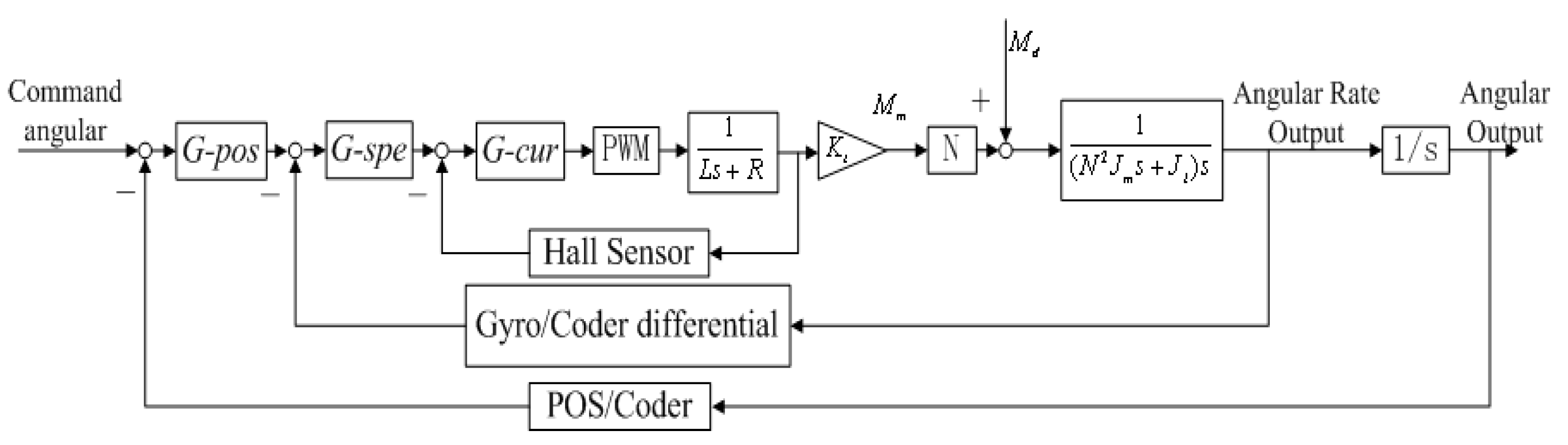
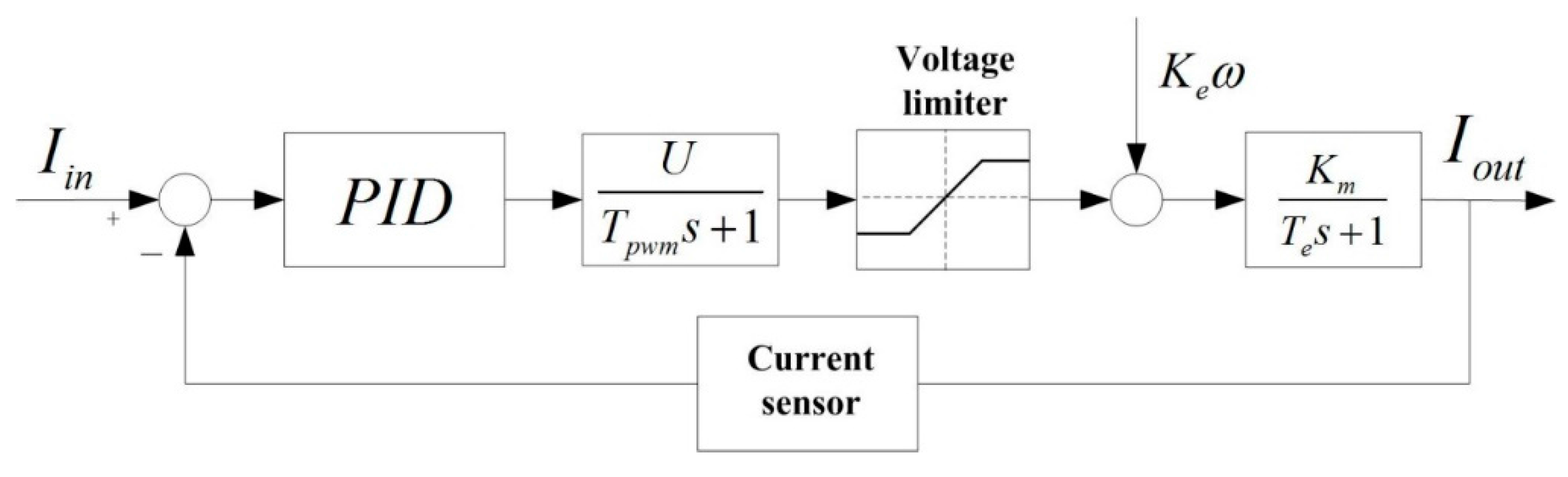
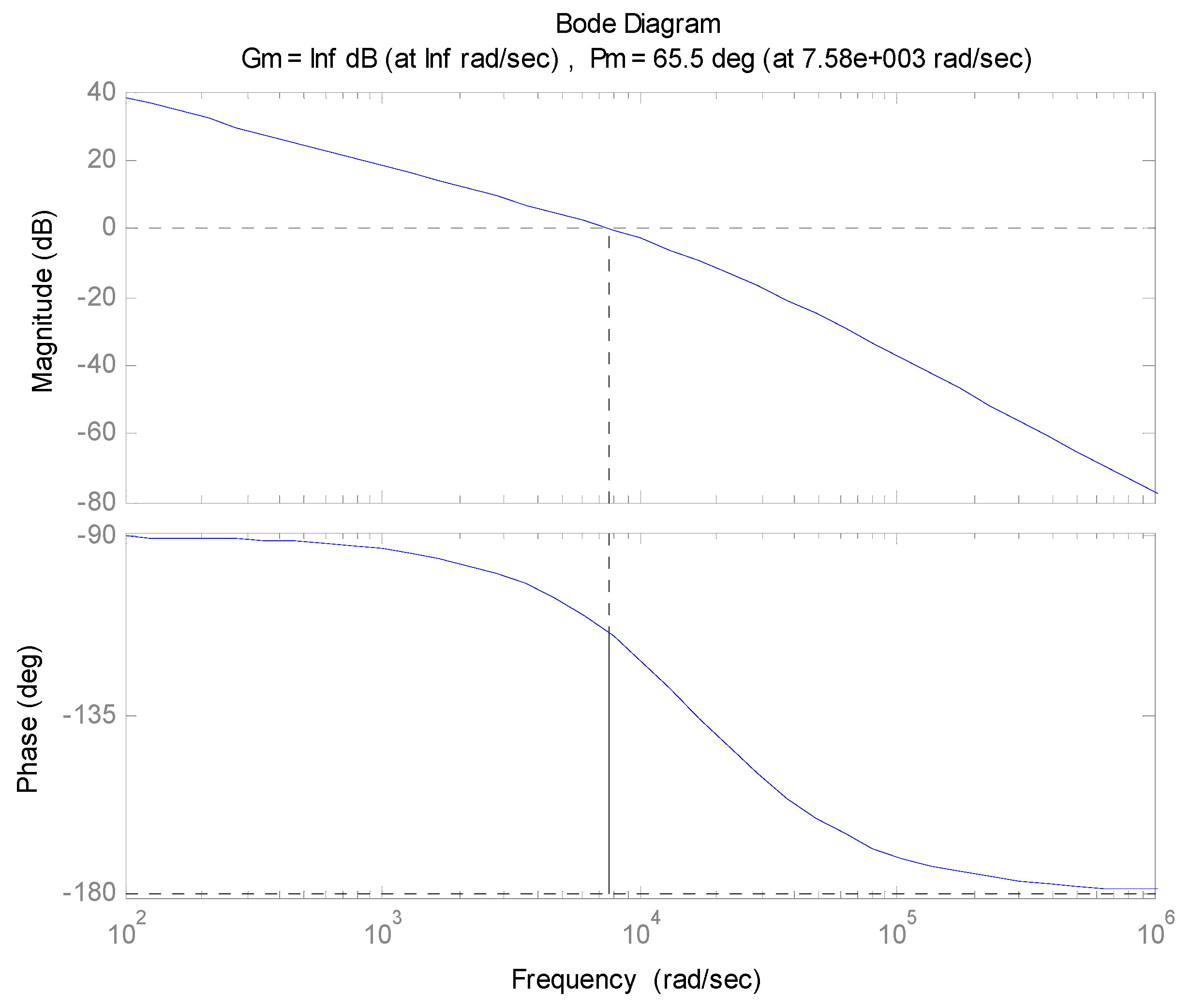
3.2.1. Design of the Current Loop Controller
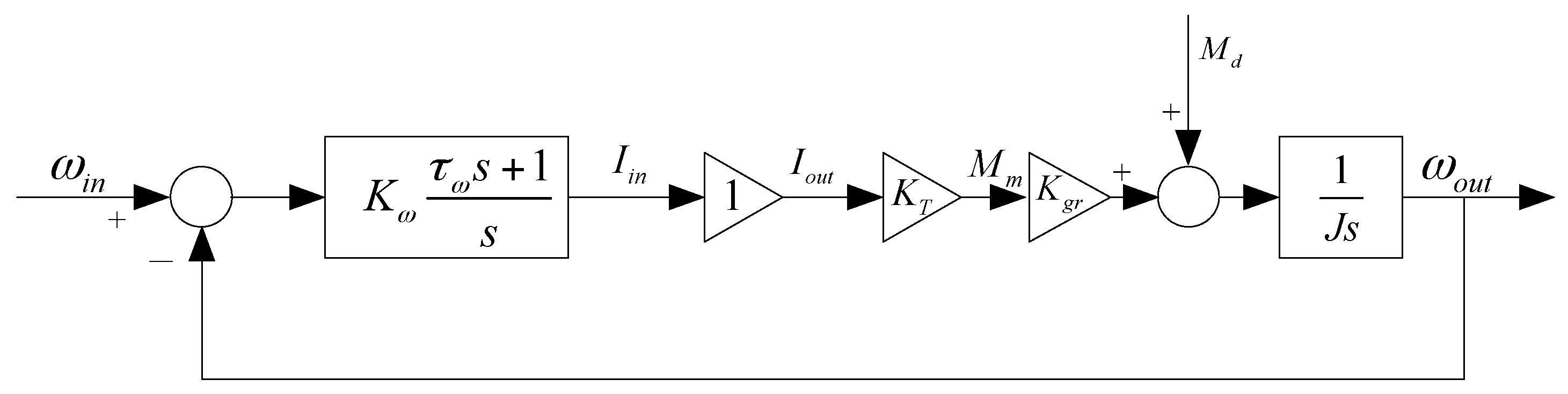
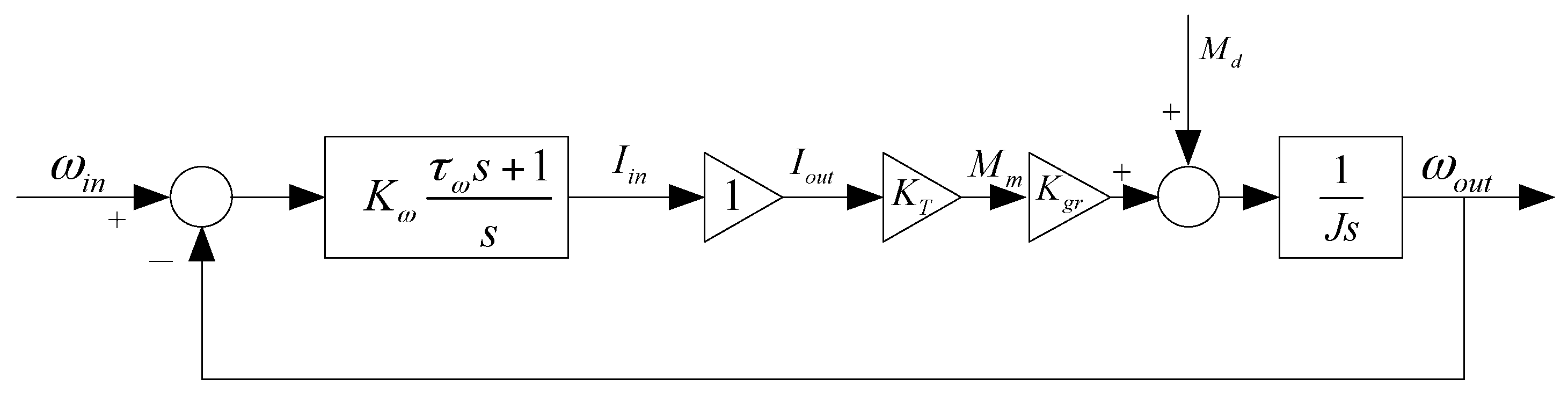
3.2.2. Design of the Rate Loop Controller
3.2.3. Design of the Position Loop Controller
4. Experiments and Results
4.1. Testing under Static Base Conditions
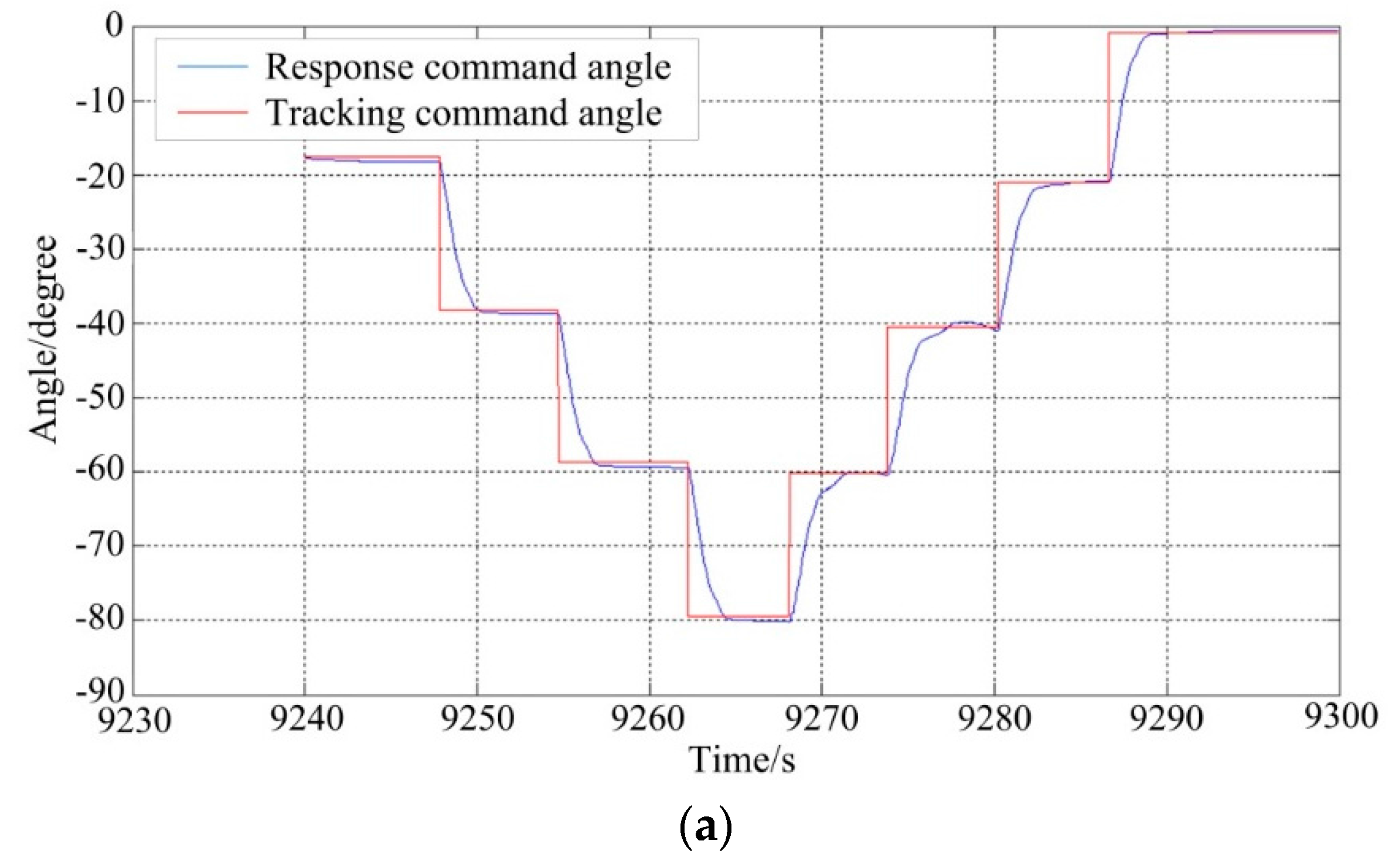
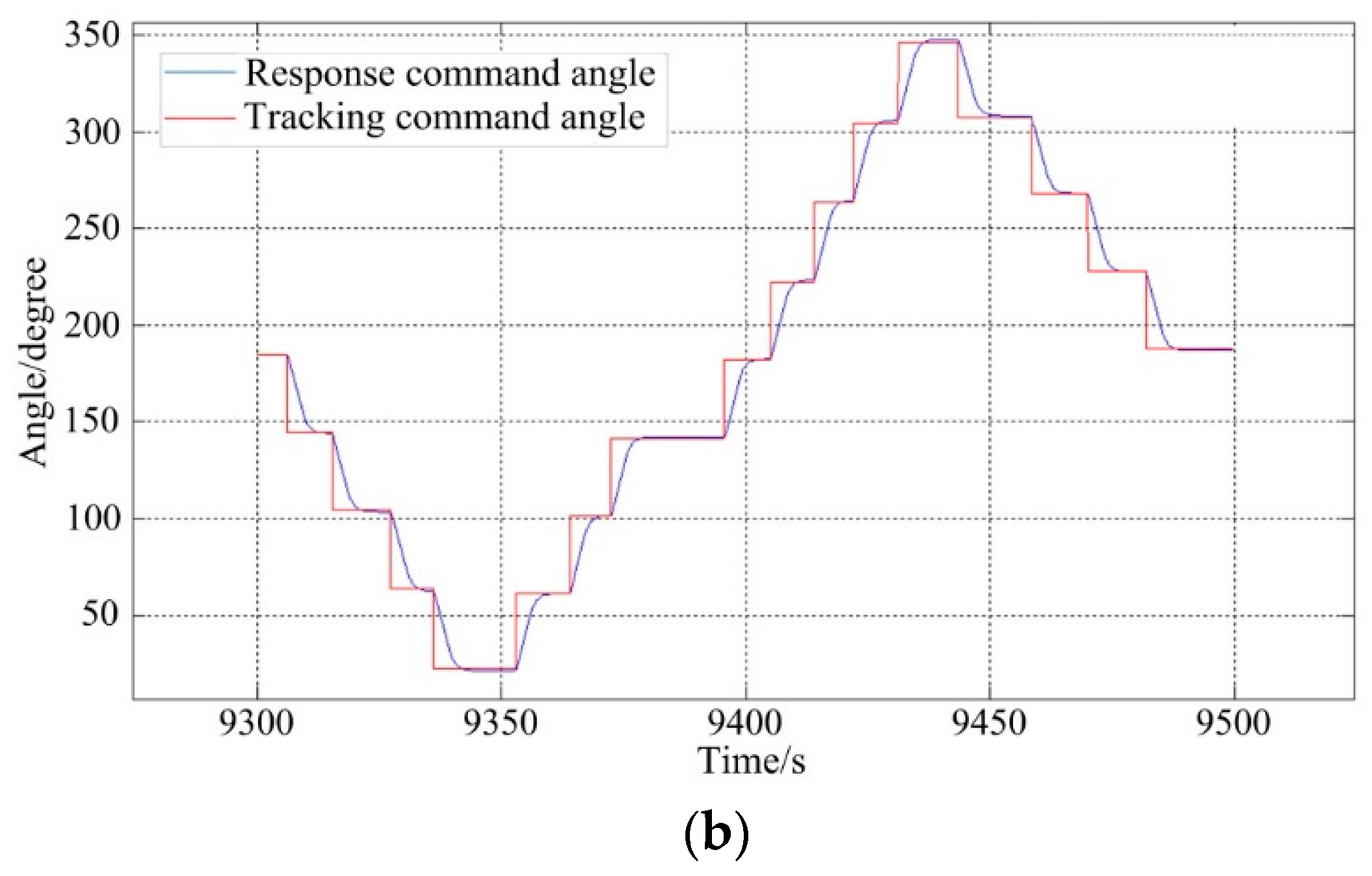
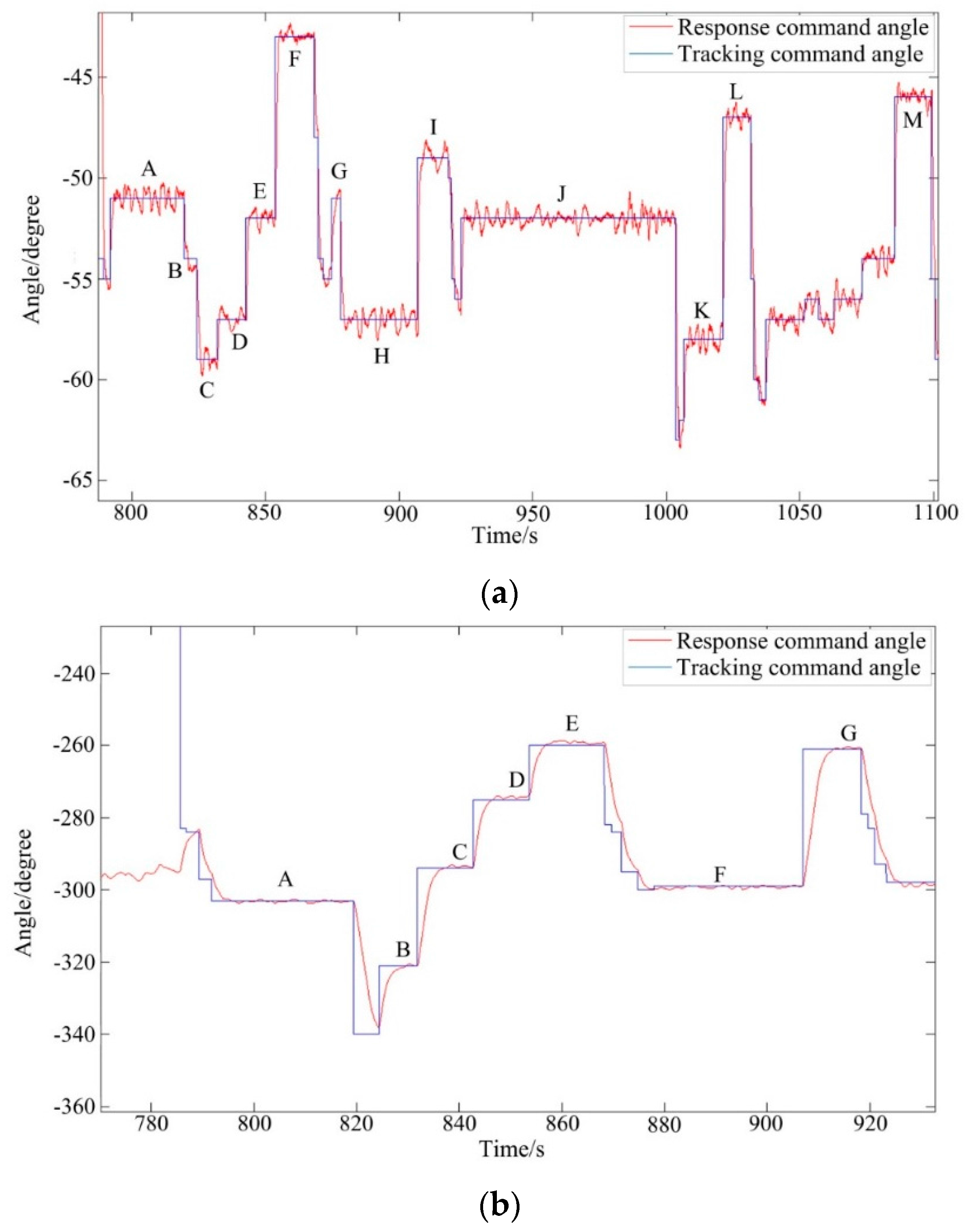
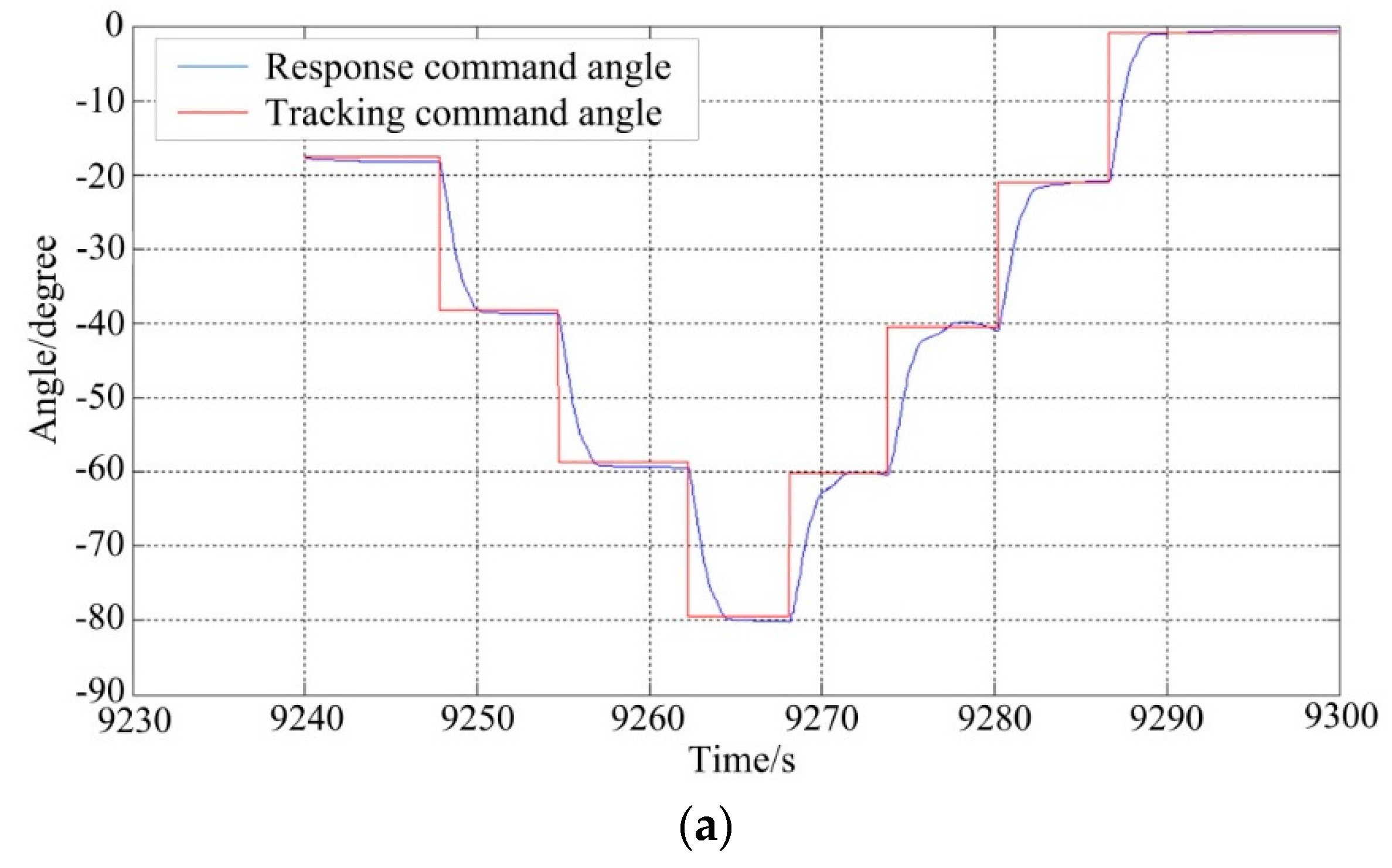
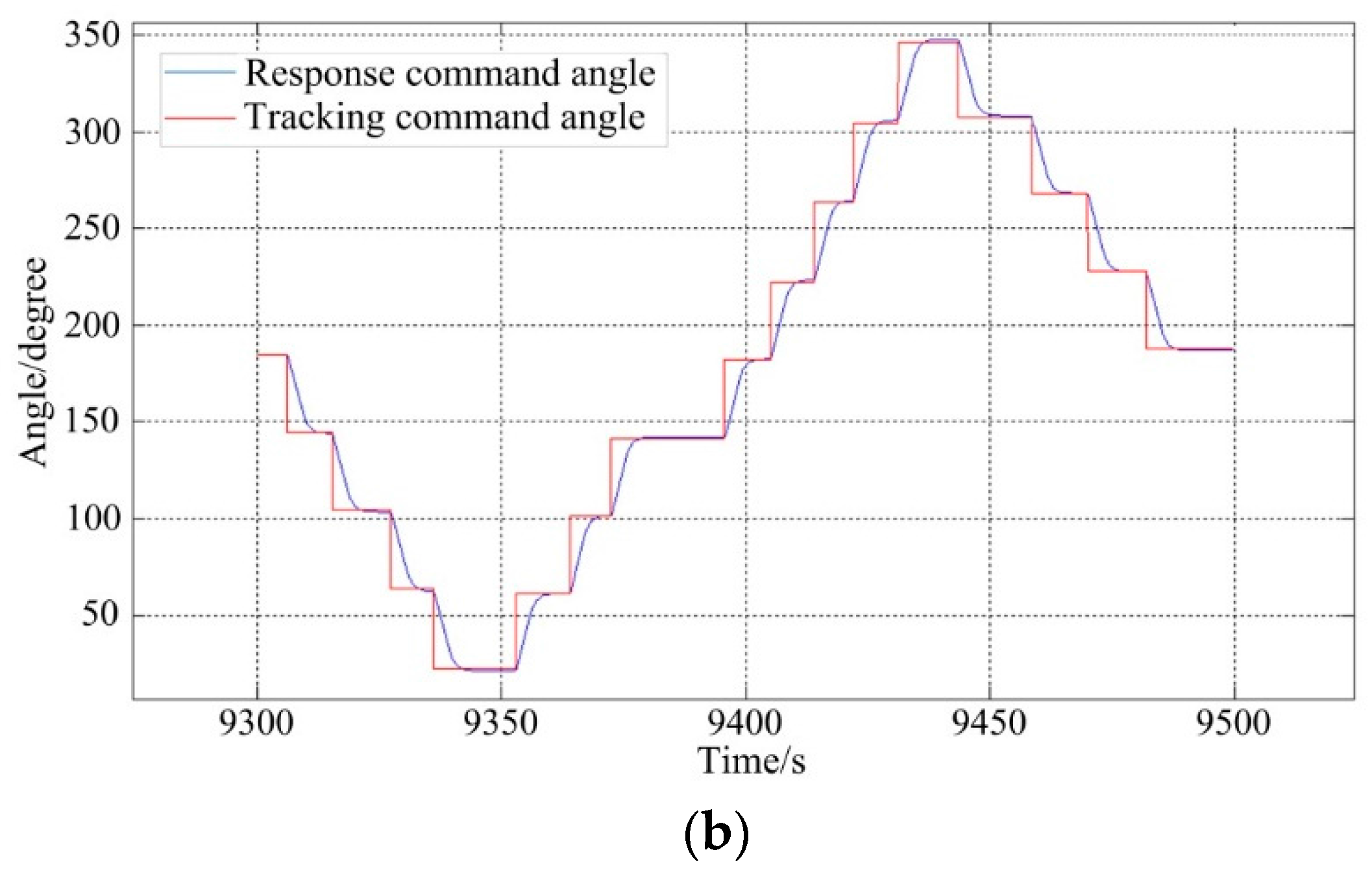
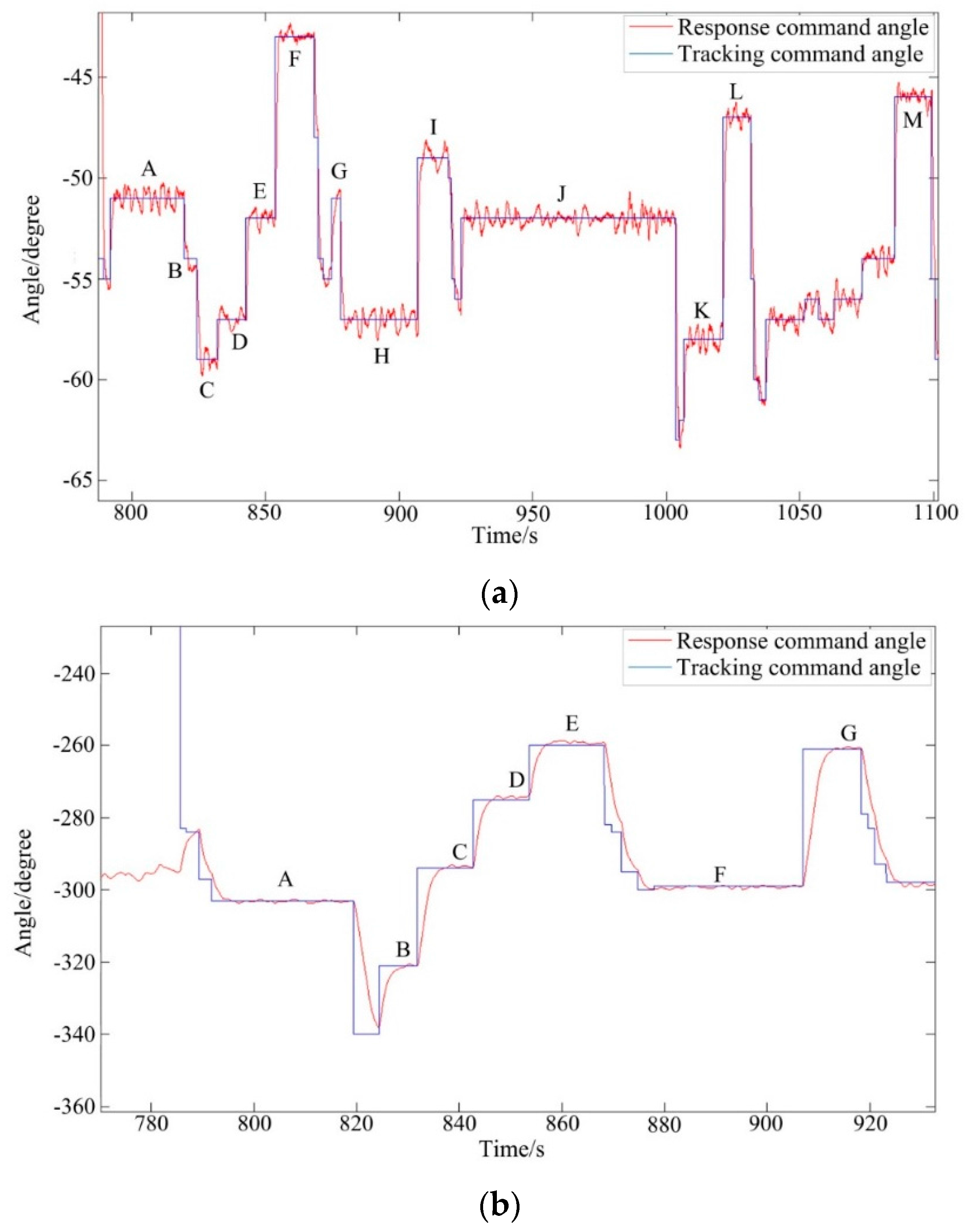
4.1.1. Tracking Performances
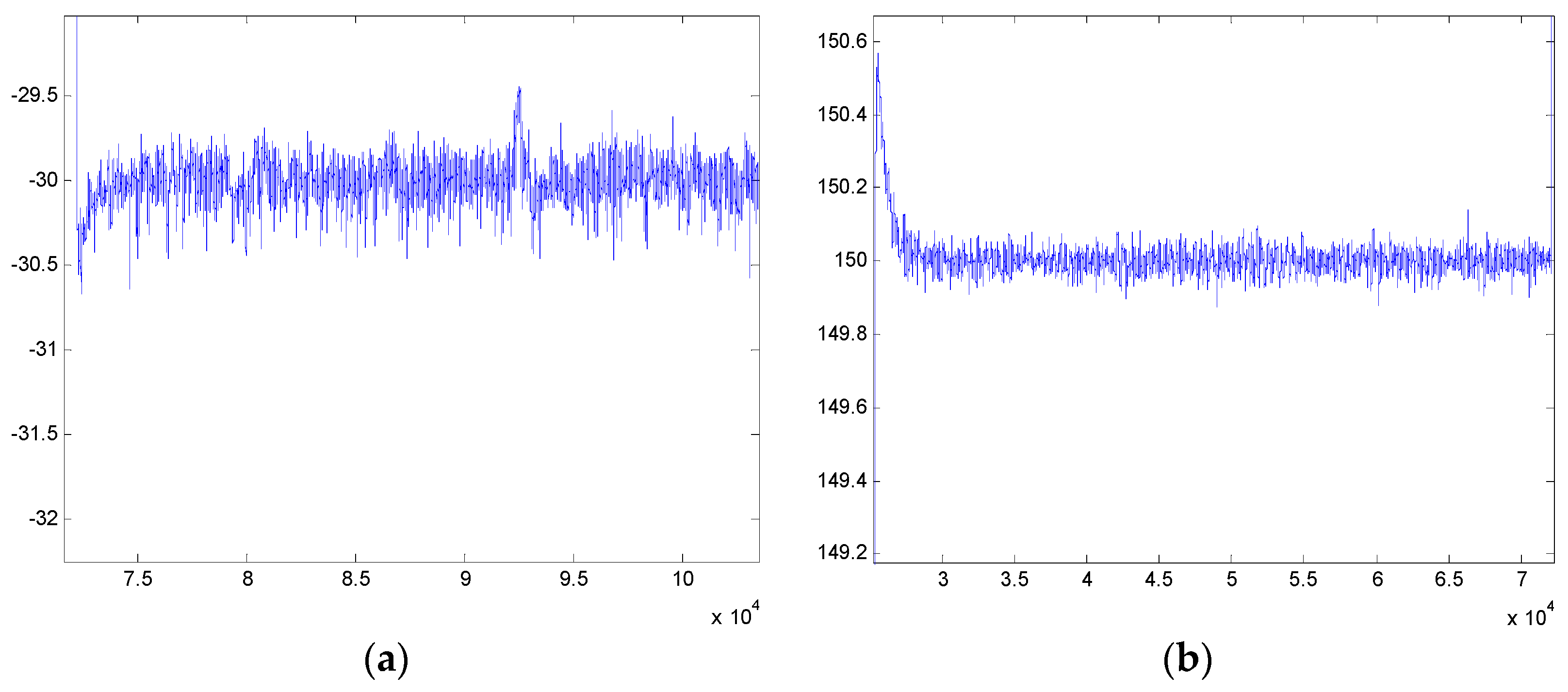
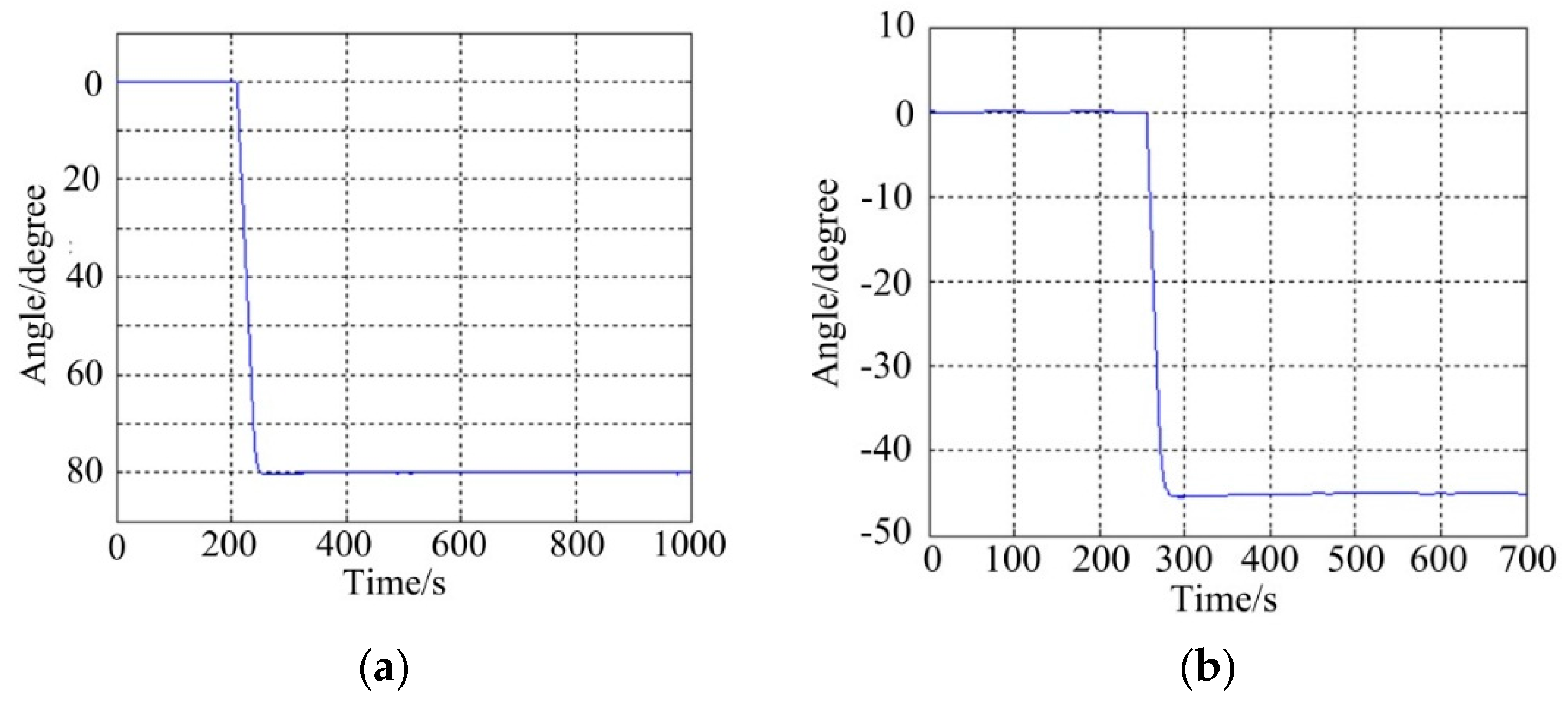
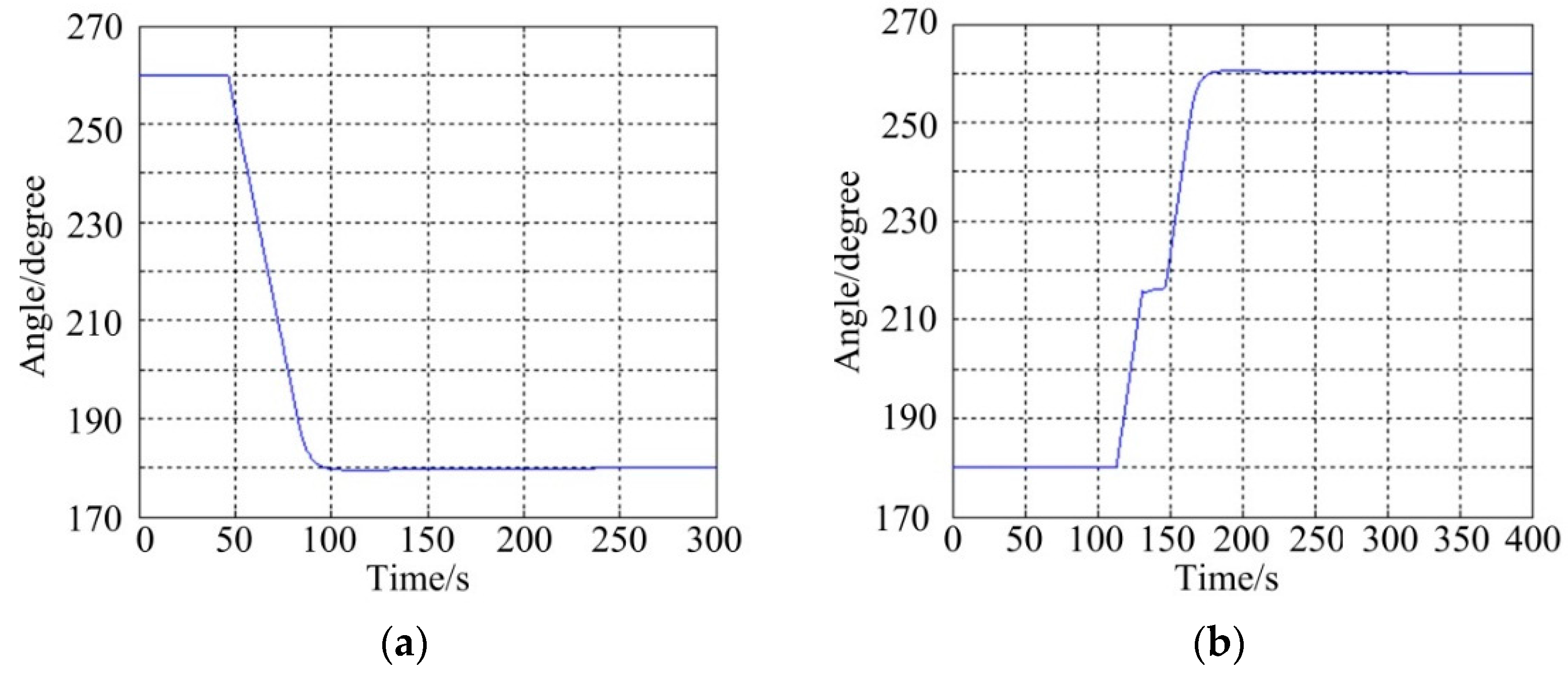
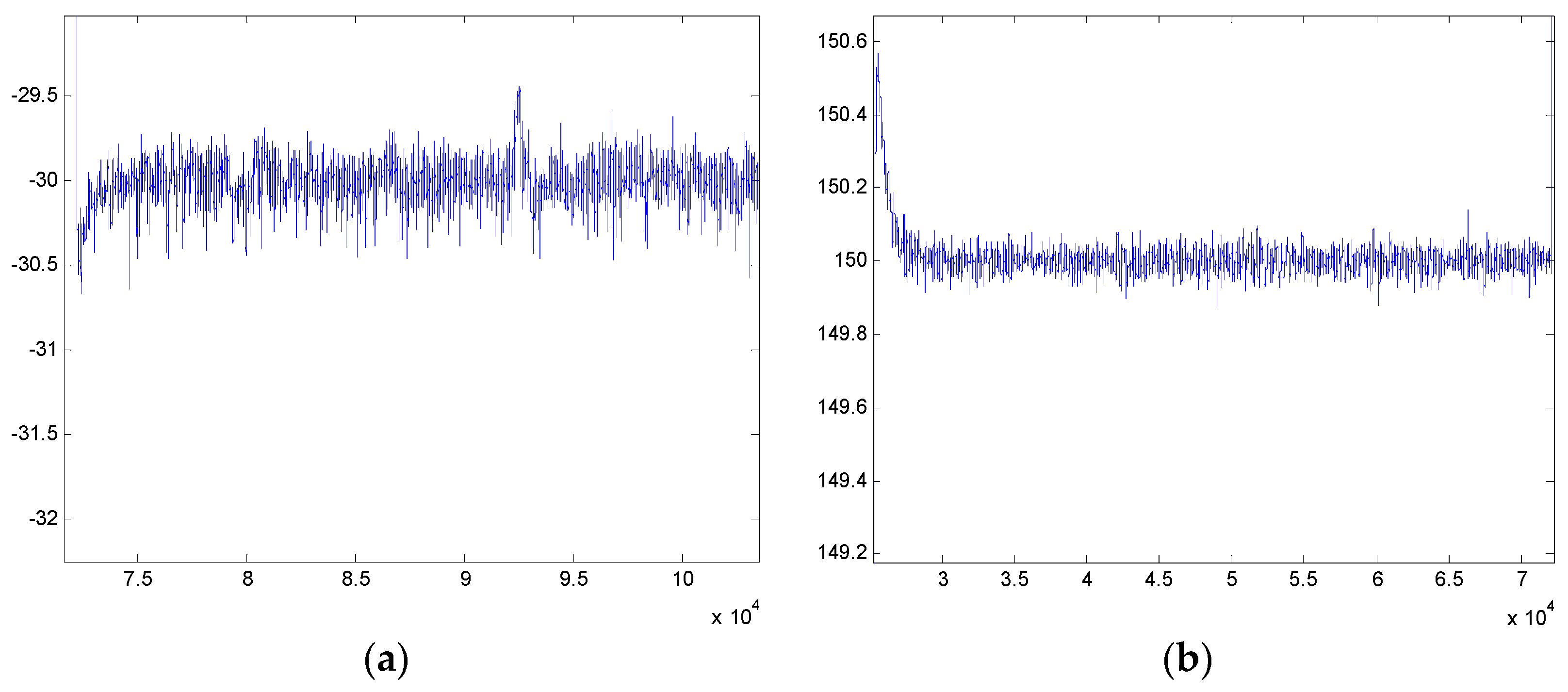
4.1.2. Stabilization Performance
- (1)
- Pitch System
- (2)
- Azimuth System
4.2. Testing under Dynamic Base Conditions
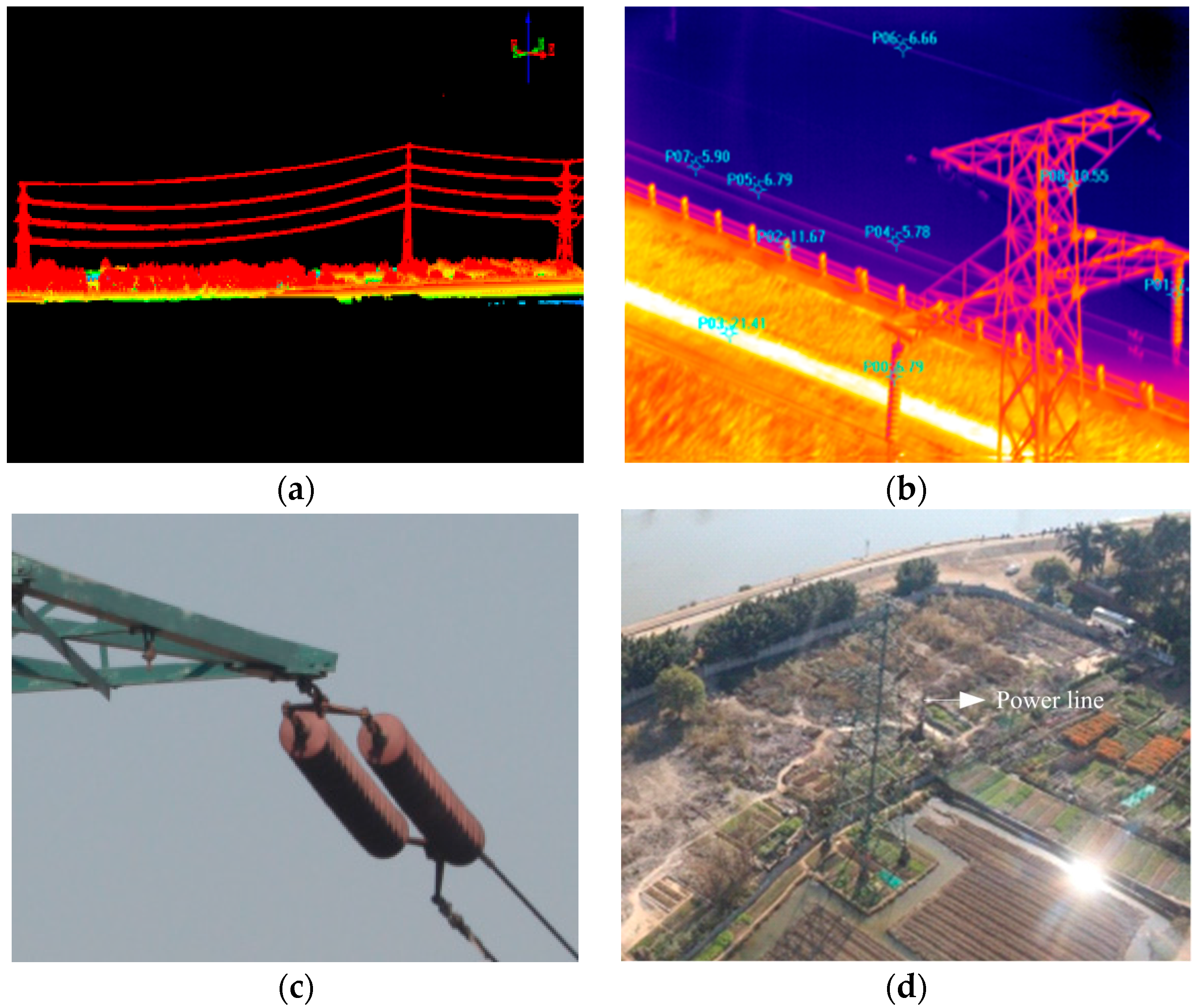
4.3. Testing the UH-Based APLI System in the Air
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Murthy, V.S.; Gupta, S.; Mohanta, D.K. Digital image processing approach using combined wavelet hidden Markov model for well-being analysis of insulators. IET Image Process. 2011, 5, 171–183. [Google Scholar] [CrossRef]
- Sharma, H.; Bhujade, R.; Adithya, V.; Balamuralidhar, P. Vision-based detection of power distribution lines in complex remote surroundings. In Proceedings of the 20th National Conference on Communications (NCC), Kanpur, India, 28 February–2 March 2014.
- Katrasnik, J.; Pernus, F.; Likar, B. A Survey of mobile robots for distribution power line inspection. IEEE Trans. Power Deliv. 2010, 25, 485–493. [Google Scholar] [CrossRef]
- Jones, D.; Golightly, I.; Roberts, J.; Usher, K. Modeling and control of a robotic power line inspection vehicle. Computer Aided Control System Design. In Proceedings of IEEE International Conference on Control Applications, Munich, Germany, 4–6 October 2006; pp. 632–637.
- Wang, B.H.; Han, L.; Zhang, H.L.; Wang, Q.; Li, B.Q. A flying robotic system for power line corridor inspection. In Proceedings of the IEEE International Conference on Robotics and Biomimetics (ROBIO), Guilin, China, 19–23 December 2009; pp. 2468–2473.
- Jones, D.I.; Earp, G.K. Camera sightline pointing requirements for aerial inspection of overhead power lines. Electr. Pow. Syst. Res. 2001, 57, 73–82. [Google Scholar] [CrossRef]
- Zhou, X.Y.; Zhao, B.L.; Gong, G.H. Control parameters optimization based on co-simulation of mechatronic system for an UA-based two-axis inertially stabilized platform. Sensors 2015, 8, 20169–20192. [Google Scholar] [CrossRef] [PubMed]
- Ming, L.; Sheng, G.H.; Liu, Y.D.; Jiang, X.C.; Nie, S.G.; Qu, G.Y. Research on auto-tracking algorithm for power line inspection based on unmanned aerial vehicle. In Proceedings of the 2012 Asia-Pacific, Power and Energy Engineering Conference (APPEEC), Shanghai, China, 27–29 March 2012; pp. 1–5.
- Whitworth, C.C.; Duller, A.W.G.; Jones, D.I.; Earp, G.K. Aerial video inspection of overhead power lines. Power Eng. J. 2001, 15, 25–32. [Google Scholar] [CrossRef]
- Zhou, X.Y.; Zhang, H.Y.; Yu, R.X. Decoupling control for two-axis inertially stabilized platform based on an inverse system and internal model control. Mechatronics 2014, 24, 1203–1213. [Google Scholar] [CrossRef]
- Liu, Z.C.; Zhu, Z.S.; Mai, X.M.; Peng, X.Y.; Wang, K. Dynamic error compensation of POS in power transmission line inspection. In Proceedings of 2013 Tbale2nd International Symposium on Instrumentation and Measurement, Sensor Network and Automation (IMSNA), Toronto, ON, Canada, 23–24 December 2013; pp. 408–411.
- Rezac, M.; Hurak, Z. Vibration rejection for inertially stabilized double gimbal platform using acceleration feedforward. In Proceedings of the 2011 IEEE International Conference on Control Applications (CCA), Denver, CO, USA, 28–30 September 2011; pp. 363–368.
- Zhou, X.Y.; Gong, G.H.; Li, J.P. Decoupling control for a three-axis inertially stabilized platform used for aerial remote sensing. Trans. Inst. Meas. Control 2015, 37, 1135–1145. [Google Scholar] [CrossRef]
- Liu, W.; Zhou, X.Y. Nonlinear friction modeling and adaptive compensation on an inertially stabilized platform system for aerial remote sensing application. Chin. J. Mech. Eng. 2013, 49, 122–129. (In Chinese) [Google Scholar] [CrossRef]
- Gomonwattanapanichl, O.; Pattanapukdee, A.; Mongkolwongrojn, M. Compensation and estimation of friction by using extended Kalman filter. In Proceedings of the SICE-ICASE, International Joint Conference, Busan, Korea, 18–21 October 2006; pp. 5032–5035.
- Ohdaira, S.; Mizumoto, I.; Kohzawa, R.; Iwai, Z. Dual-rate robust adaptive control of a cart-crane system. In Proceedings of the SICE-ICASE, International Joint conference, Busan, Korea, 18–21 October 2006; pp. 1800–1805.
- Mu, Q.Q.; Liu, G.; Zhong, M.Y.; Chu, Z.Y. Imbalance torque compensation for three-axis inertially stabilized platform using acceleration feedforward. In Proceedings of the 2012 8th IEEE International Symposium on Instrumentation and Control Technology (ISICT), London, 11–13 July 2012; pp. 157–160.
- Ito, K.; Maebashi, W.; Ikeda, J.; Iwasaki, M. Fast and precise positioning of rotary table systems by feedforward disturbance compensation considering interference force. In Proceedings of the IECON 2011 37th Annual Conference on IEEE Industrial Electronics Society, Melbourne, VIC, Australia, 7–10 November 2011; pp. 3382–3387.
- Chen, G.M.; Liang, L.H. Research on system of three-axis swing turntable based on robust compensation control. In Proceedings of the 2011 3rd International Workshop on Intelligent Systems and Applications (ISA), Wuhan, China, 28–29 May 2011; pp. 1–4.
- Dan, J.G.; Kaan, E. Precision control of a T-type gantry using sensor/actuator averaging and activevibration damping. Precis. Eng. 2012, 36, 299–314. [Google Scholar]
- Masten, M.K. Inertially stabilized platforms for optical imaging systems. IEEE Contr. Syst. Mag. 2008, 28, 47–64. [Google Scholar] [CrossRef]
- Hilkert, J.M. Inertially stabilized platform technology Concepts and principles. IEEE Contr. Syst. Mag. 2008, 28, 26–46. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number | Tracking Angles (Degree) | RMS | Number | Tracking Angles (Degree) | RMS |
|---|---|---|---|---|---|
| A | −51 | 0.3982 | H | −57 | 0.4200 |
| B | −54 | 0.4642 | I | −49 | 0.4330 |
| C | −59 | 0.3773 | J | −52 | 0.3413 |
| D | −57 | 0.3563 | K | −58 | 0.4379 |
| E | −52 | 0.3088 | L | −47 | 0.2987 |
| F | −43 | 0.1925 | M | −46 | 0.2843 |
| G | −51 | 0.2819 |
| Number | Tracking Angles (Degree) | RMS | Number | Tracking Angles (Degree) | RMS |
|---|---|---|---|---|---|
| A | −303 | 0.3164 | E | −260 | 0.4105 |
| B | −321 | 0.2937 | F | −299 | 0.3997 |
| C | −294 | 0.3743 | G | −261 | 0.3162 |
| D | −275 | 0.3832 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, X.; Jia, Y.; Zhao, Q.; Yu, R. Experimental Validation of a Compound Control Scheme for a Two-Axis Inertially Stabilized Platform with Multi-Sensors in an Unmanned Helicopter-Based Airborne Power Line Inspection System. Sensors 2016, 16, 366. https://doi.org/10.3390/s16030366
Zhou X, Jia Y, Zhao Q, Yu R. Experimental Validation of a Compound Control Scheme for a Two-Axis Inertially Stabilized Platform with Multi-Sensors in an Unmanned Helicopter-Based Airborne Power Line Inspection System. Sensors. 2016; 16(3):366. https://doi.org/10.3390/s16030366
Chicago/Turabian StyleZhou, Xiangyang, Yuan Jia, Qiang Zhao, and Ruixia Yu. 2016. "Experimental Validation of a Compound Control Scheme for a Two-Axis Inertially Stabilized Platform with Multi-Sensors in an Unmanned Helicopter-Based Airborne Power Line Inspection System" Sensors 16, no. 3: 366. https://doi.org/10.3390/s16030366