
Three-Dimensional ISAR Imaging Method for High-Speed Targets in Short-Range Using Impulse Radar Based on SIMO Array


Abstract
:
1. Introduction
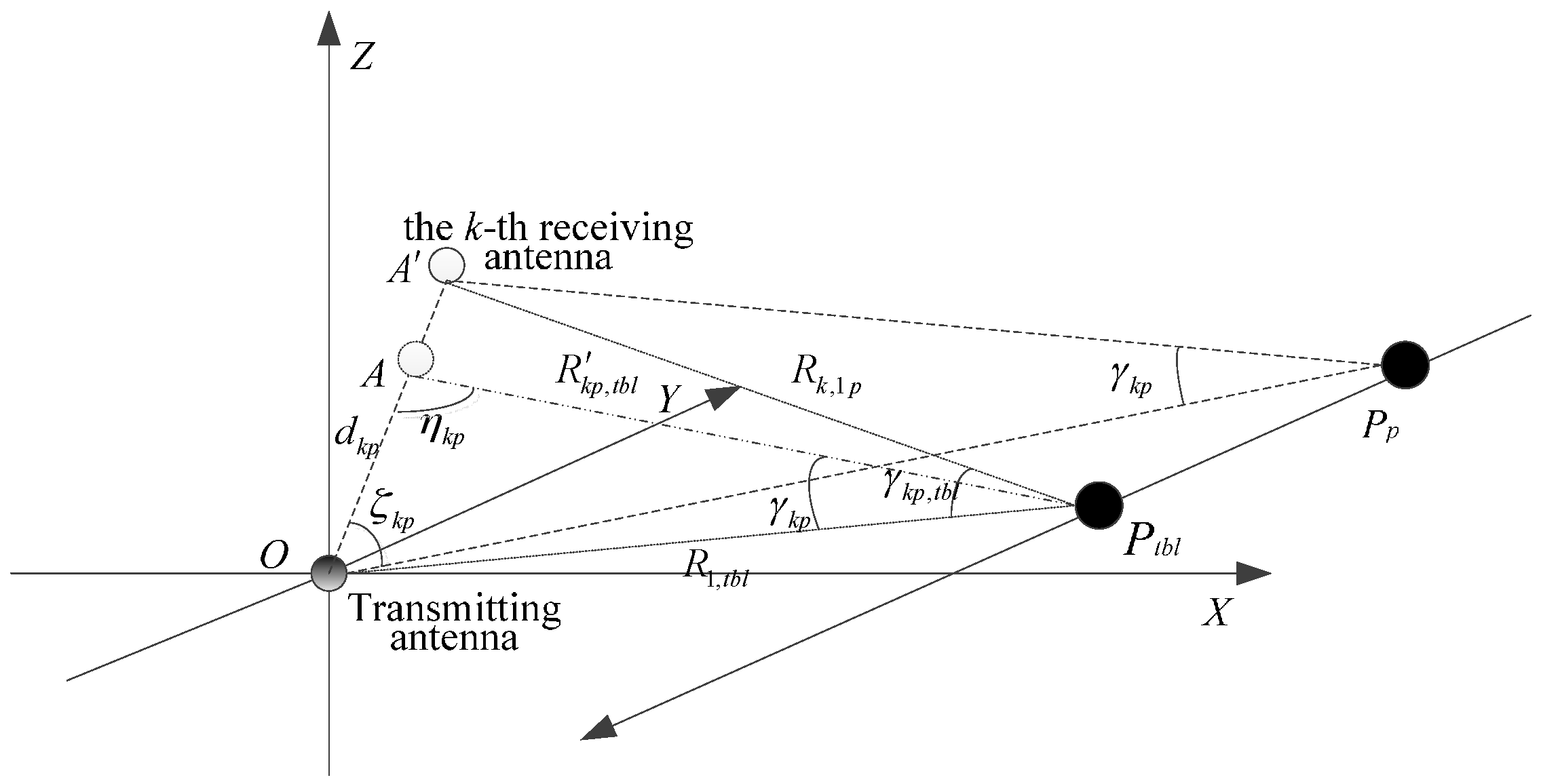
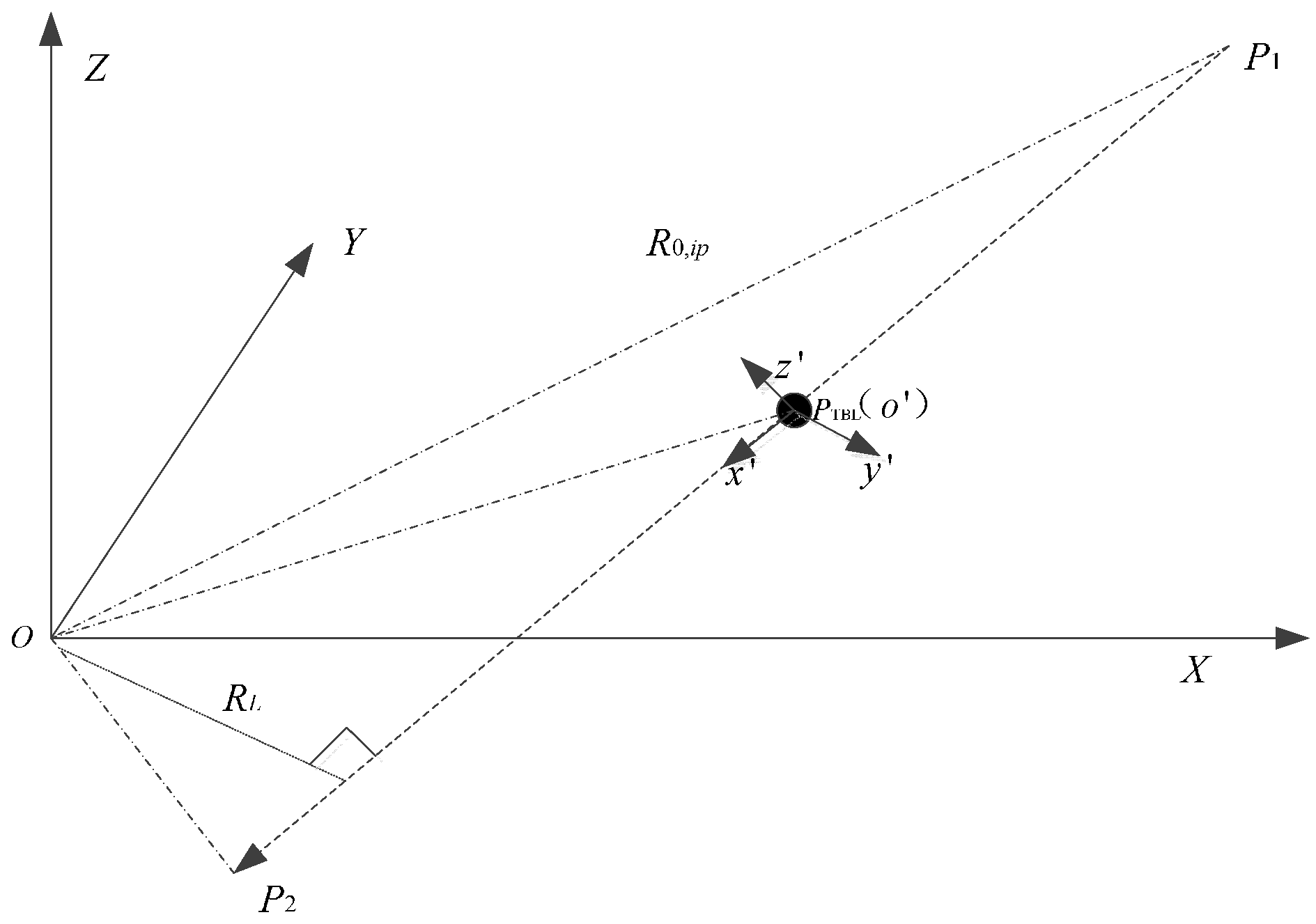
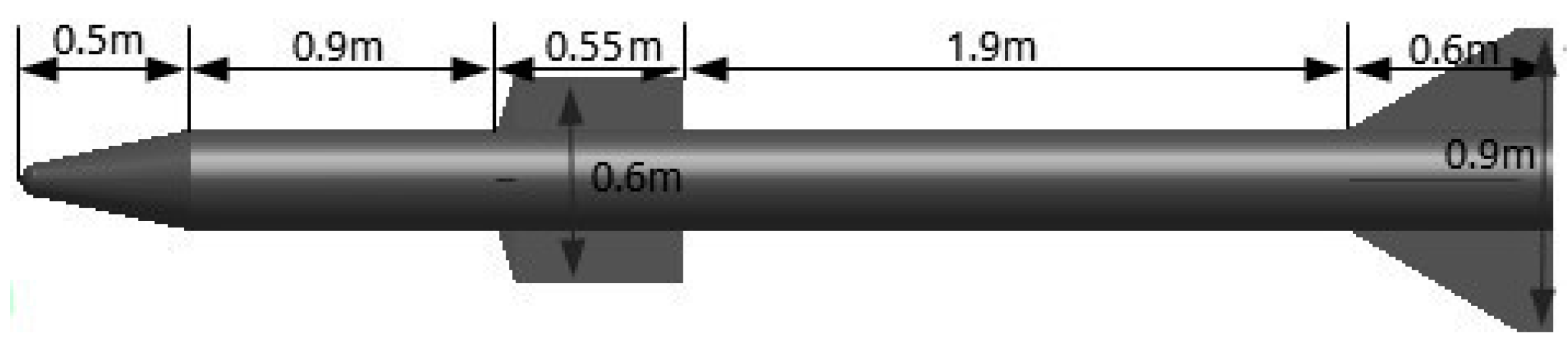
2. Results Imaging Scene Description
3. The Three-Dimensional ISAR Imaging Principle
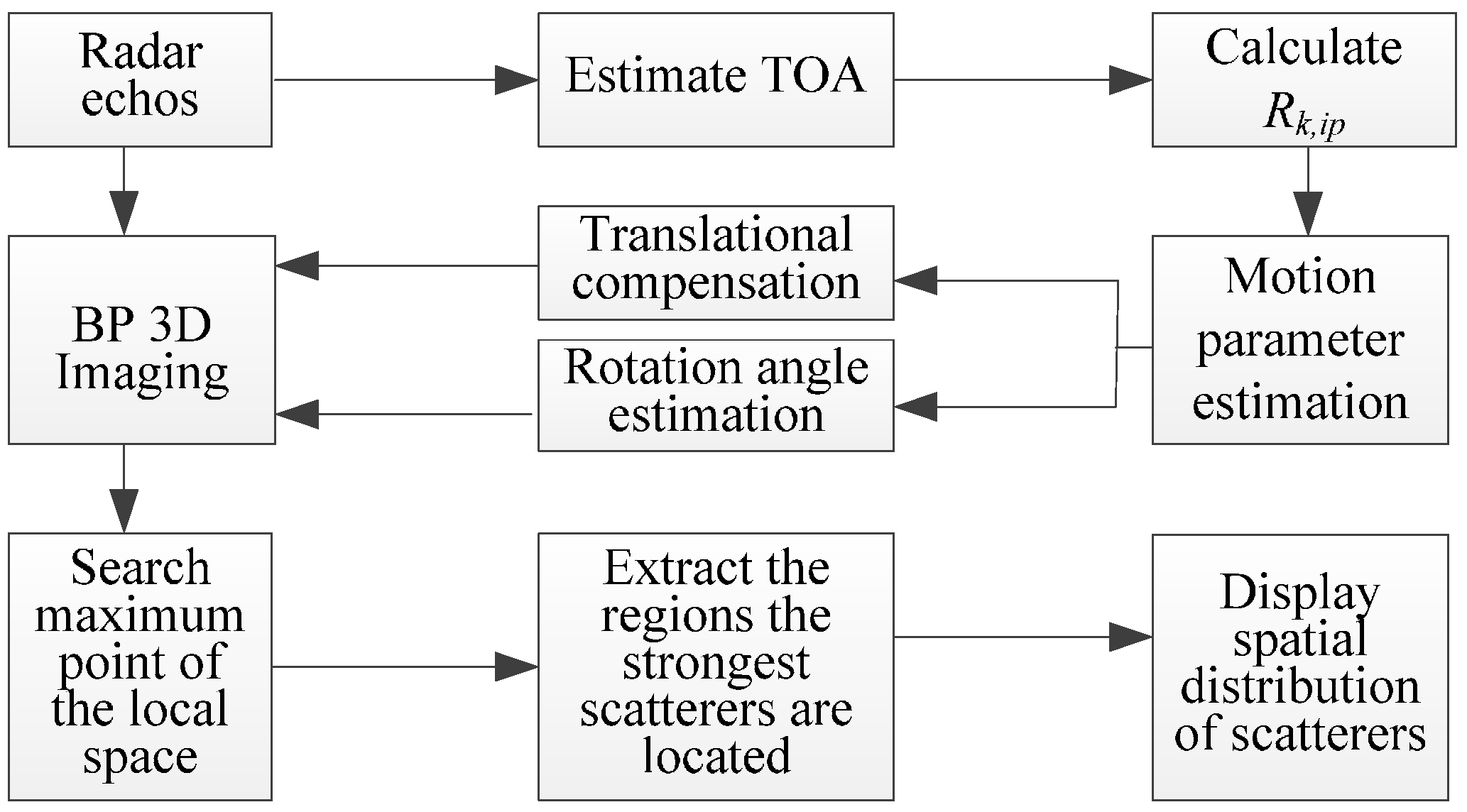
4. SIMO-ISAR Imaging Processing Chain
4.1. Motion Parameter Estimation
4.2. Translational Compensation
4.3. Rotation Angle Estimation
4.4. Imaging Processing
4.5. Flow Chart
5. Experimental Section
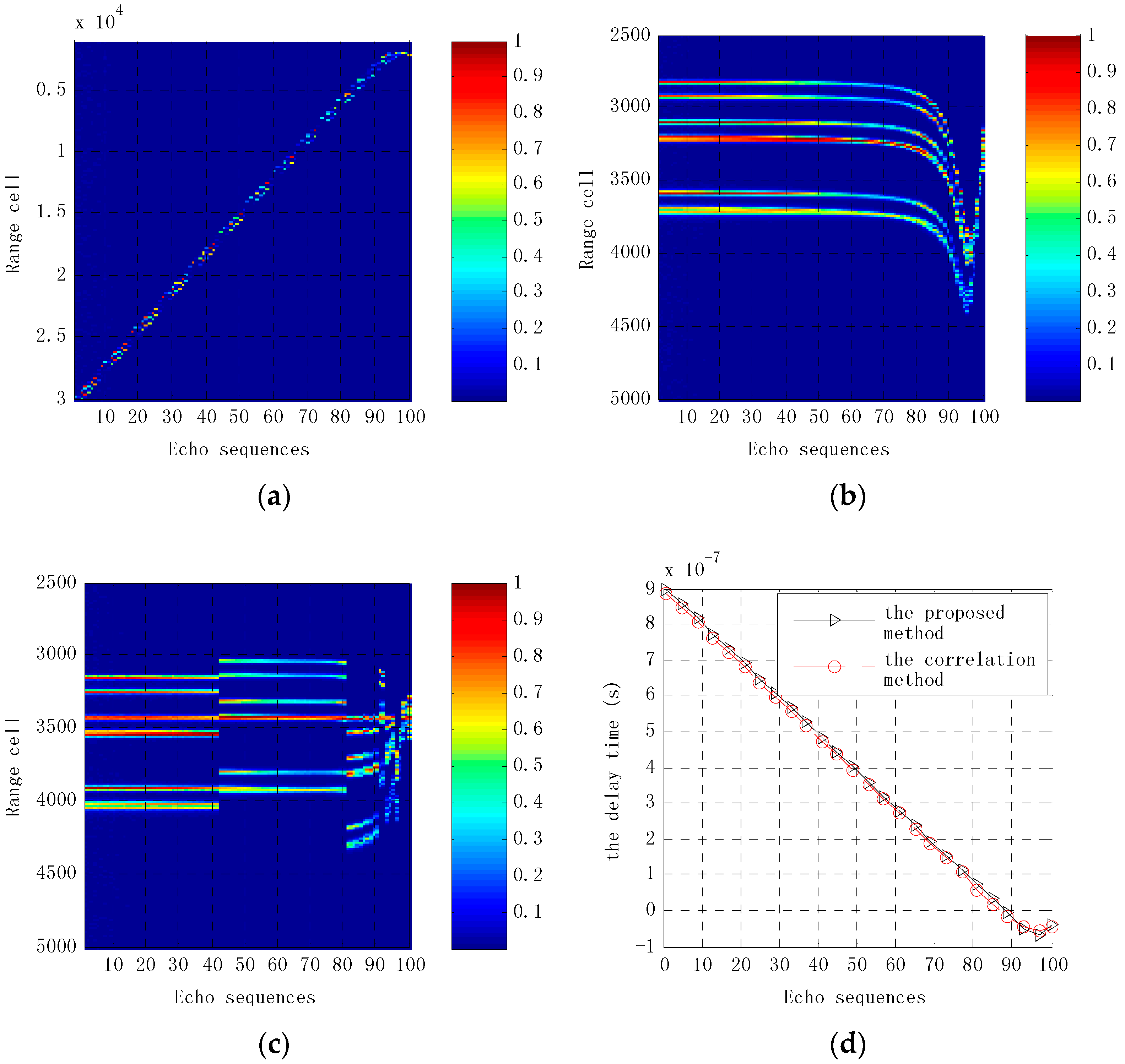
5.1. Motion Parameter Estimation Result
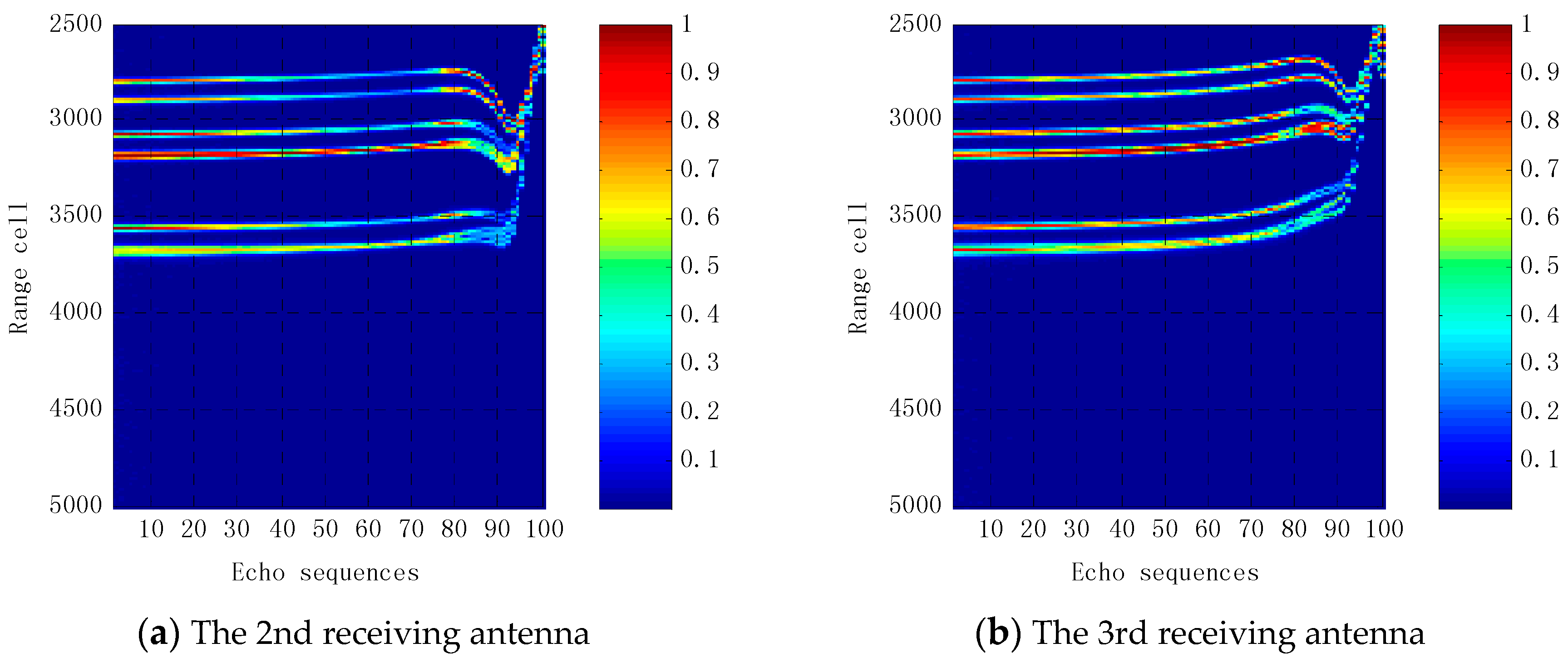
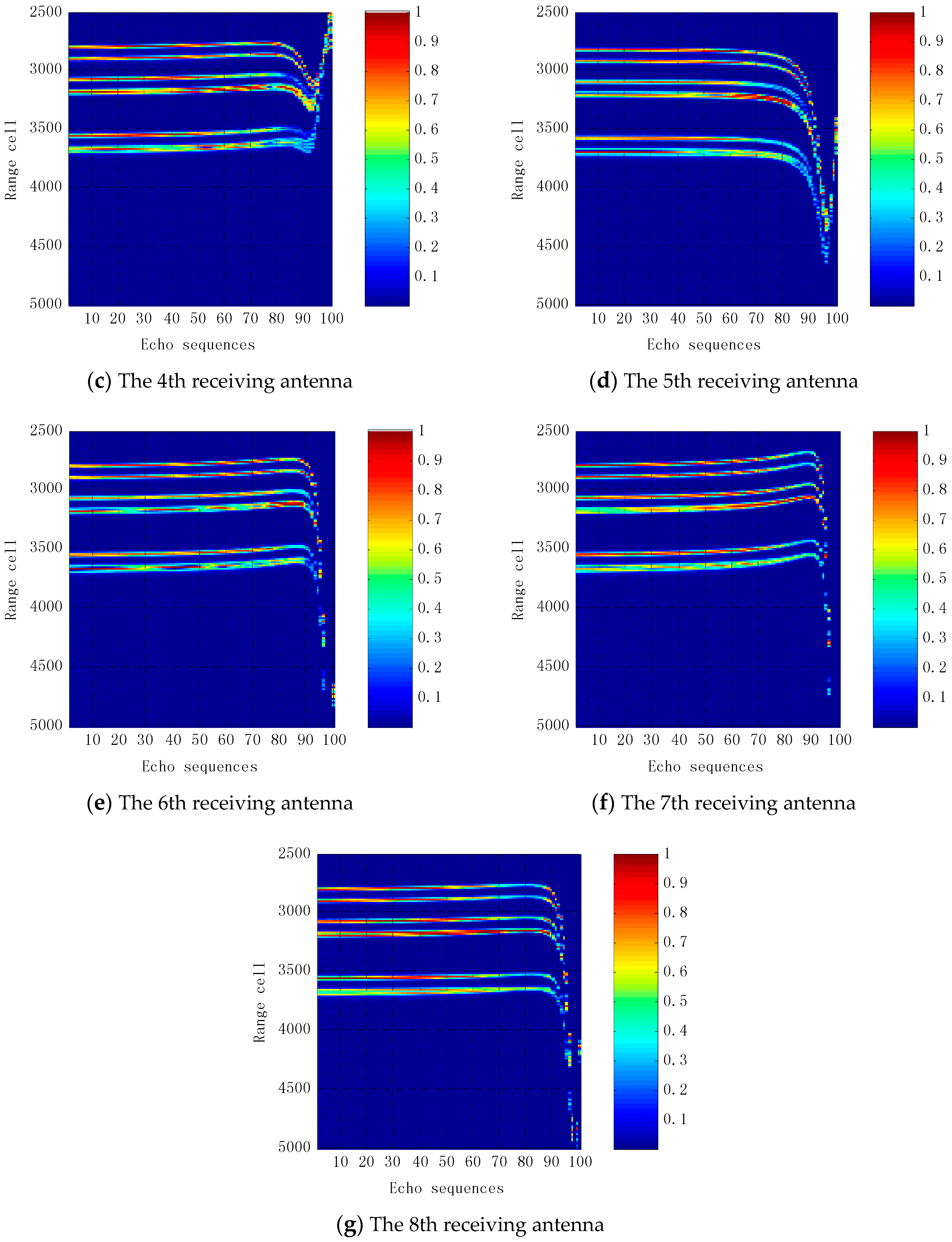
5.2. Translational Compensation Results
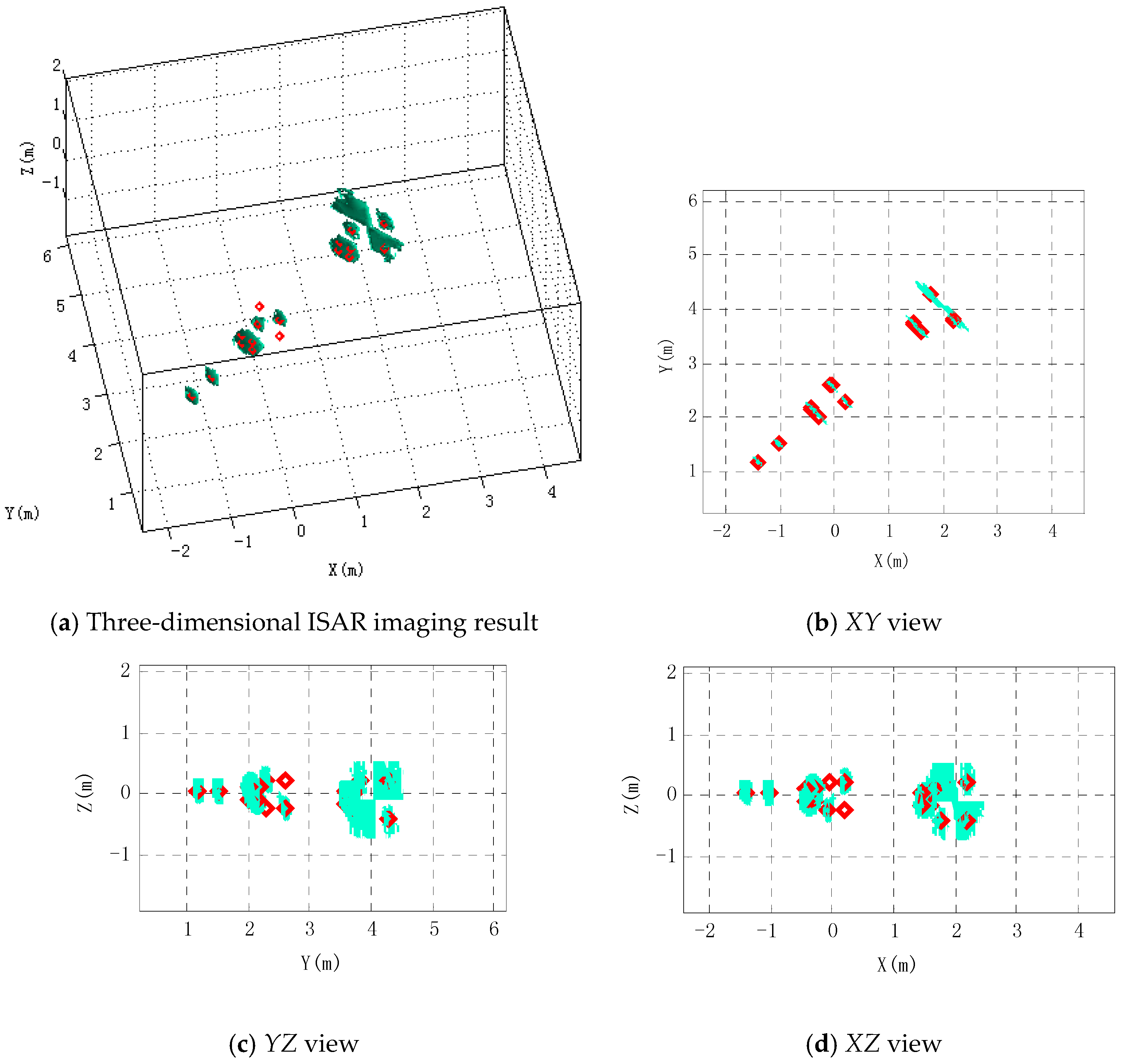
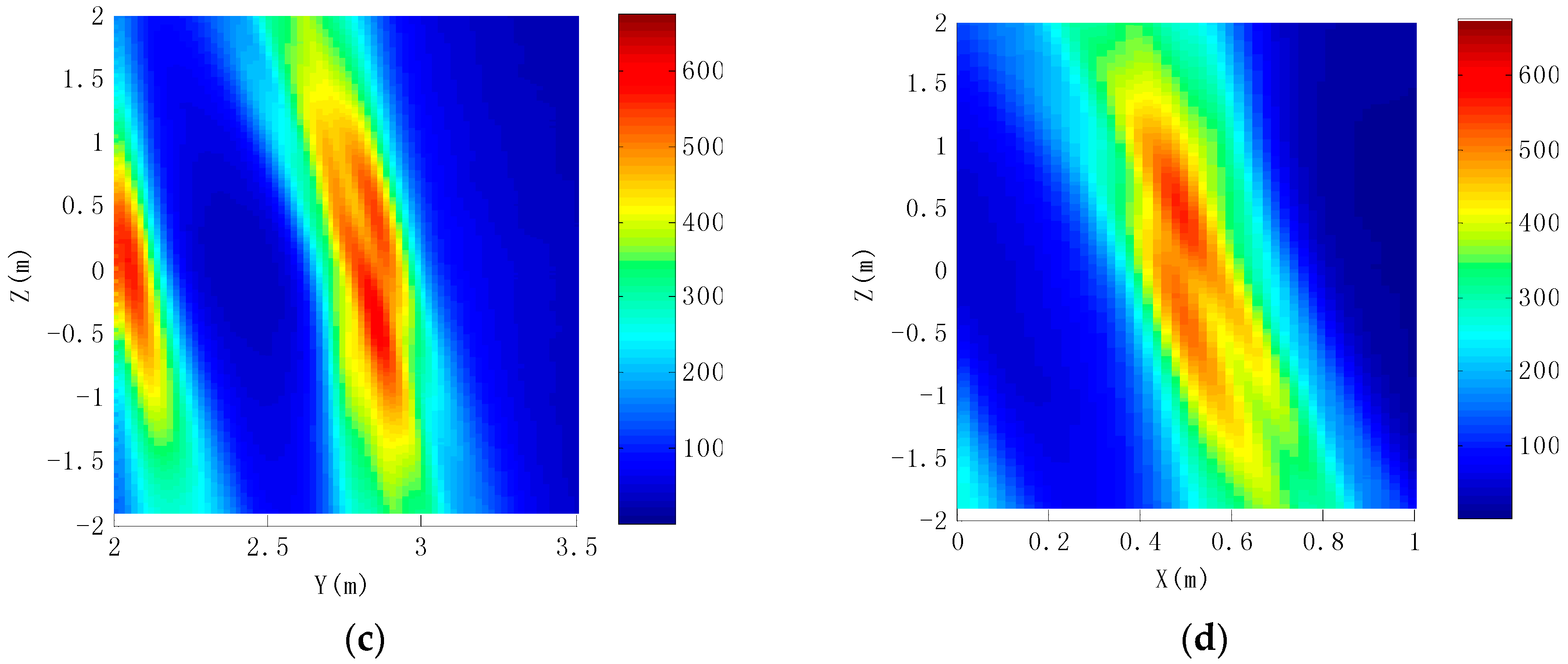
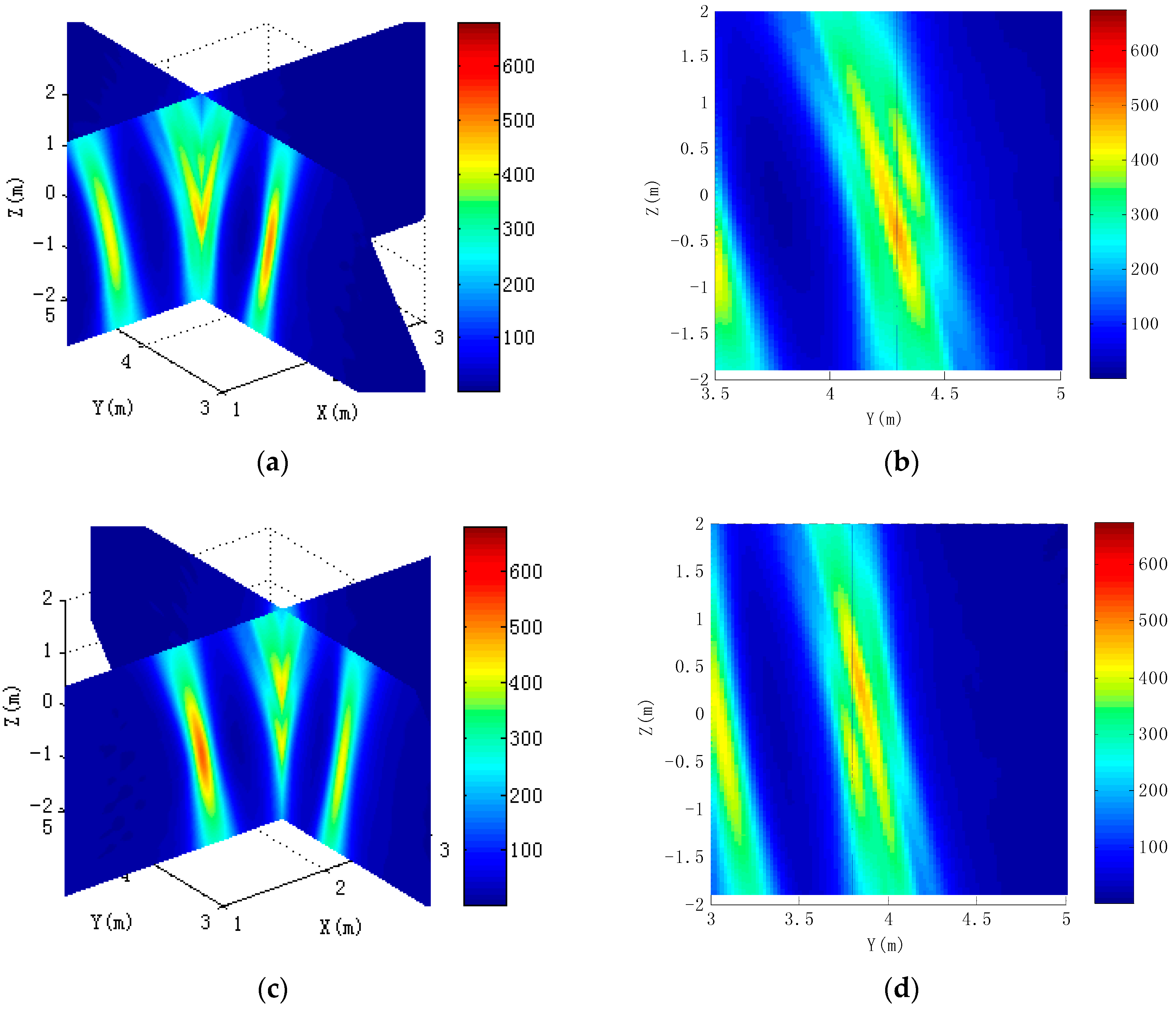
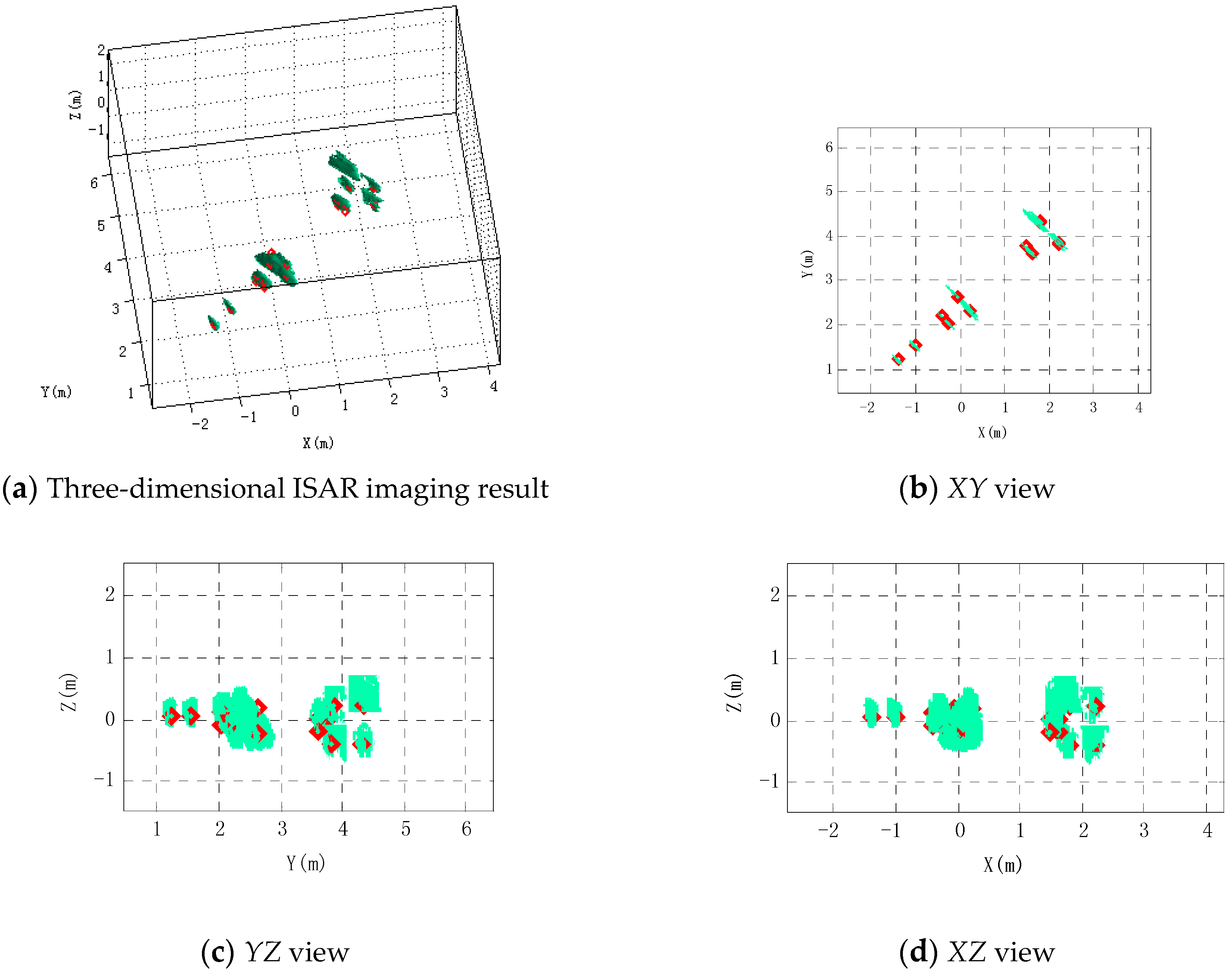
5.3. Imaging Results
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Ali, M.A.; Moghaddam, M. 3D nonlinear super-resolution microwave inversion technique using time-domain data. IEEE Trans. Antenn. Propag. 2010, 58, 2327–2336. [Google Scholar] [CrossRef]
- Scannapieco, A.; Renga, A.; Moccia, A. Preliminary study of a millimeter wave FMCW InSAR for UAS indoor navigation. Sensors 2015, 15, 2309–2335. [Google Scholar] [CrossRef] [PubMed]
- Salman, R.; Willms, I. 3D UWB radar super-resolution imaging for complex objects with discontinous wavefronts. In Proceedings of the 2011 IEEE International Conference on Ultra-Wideband, Bologna, Italy, 14–16 September 2011; pp. 346–350.
- Kidera, S.; Kani, Y.; Sakamoto, T.; Sato, T. An experimental study for a high-resolution 3-D imaging algorithm with linear array for UWB radars. In Proceedings of the 2007 IEEE International Conference on Ultra-Wideband, Singapore, 24–26 September 2007; pp. 600–605.
- Zhou, X.; Chang, N.; Li, S. Applications of SAR interferometry in earth and environmental science research. Sensors 2009, 9, 1876–1912. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.H.; Jin, T.; Song, Q. 3-D back-projection imaging in circular SAR with impulse signal. In Proceedings of the 2009 2nd Asian-Pacific Conference on Synthetic Aperture Radar, Xi'an, China, 26–30 October 2009; pp. 775–778.
- Sarafianou, M.; Gibbins, D.R.; Craddock, I.J. A novel 3-D breast surface reconstruction algorithm for a multi-static radar-based breast imaging system. In Proceedings of the 2011 Loughborough Antennas & Propagation Conference, Loughborough, UK, 14–15 November 2011; pp. 1–4.
- Fortuny, J. An efficient 3-D near-field ISAR algorithm. IEEE Trans. Aero. Elec. Syst. 1998, 34, 1261–1270. [Google Scholar] [CrossRef]
- Ma, C.Z.; Yeo, T.S.; Guo, Q.; Wei, P.J. Bistatic ISAR imaging incorporating interferometric 3-D imaging technique. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3859–3867. [Google Scholar] [CrossRef]
- Wang, G.Y.; Xia, X.G.; Chen, V.C. Three-dimensional ISAR imaging of maneuvering targets using three receivers. IEEE Trans. Image Process. 2001, 10, 436–447. [Google Scholar] [CrossRef] [PubMed]
- Elias, P.; Kontoes, C.; Papoutsis, I.; Kotsis, I.; Marinou, A.; Paradissis, D.; Sakellariou, D. Permanent Scatterer InSAR Analysis and Validation in the Gulf of Corinth. Sensors 2009, 9, 46–55. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Wen, Y.Y.; Yu, J.; Cai, D.D. Three dimensional reconstruction method for moving target from ISAR sequences. J. Syst. Simul. 2013, 25, 809–816. [Google Scholar]
- Ti, Q.Q.; Wei, G.H.; Zhou, X.P. The Research of Short-range Moving Target 3-D ISAR Imaging. In Proceedings of the 2014 12th International Conference on Signal Processing, Hangzhou, China, 19–23 October 2014; pp. 851–856.
- Zhang, C.; Zhang, X.L.; Zhang, W. Research on the three-dimensional ISAR imaging for spin target. In Proceedings of the 2007 1st Asian and Pacific Conference on Synthetic Aperture Radar, Huangshan, China, 5–9 November 2007; pp. 546–549.
- Zhao, H.P.; Fu, X.J.; Zhang, Y.J.; Gao, M.G. Three-dimensional ISAR imaging using high resolution range profiles. In Proceedings of the 2013 IET International Radar Conference, Xi'an, China, 14–16 April 2013; pp. 1–6.
- Zhang, L.; He, X.H.; Li, X.X. In 3D InISAR images fusion method based on maximization mutual information. In Proceedings of the 2012 8th International Conference on Wireless Communications, Networking and Mobile Computing, Shanghai, China, 21–23 September 2012; pp. 1–4.
- Du, Z.L.; Zhang, X.G.; Wei, Y.; Bai, Y.C. A new algorithm of ISAR range alignment based on real time delay. In Proceedings of the 2012 International Conference on Control Engineering and Communication Technology, Shenyang, China, 7–9 December 2012; pp. 197–200.
- Chen, J.; Yuan, Y.N.; Luan, J. A novel motion compensation method for high-resolution ISAR imaging. In Proceedings of the 2012 International Conference on Control Engineering and Communication Technology, Beijing, China, 21–25 October 2012; pp. 1866–1869.
- Morgan, A.M. Ultra-wideband impulse scattering measurements. IEEE Trans. Antenn. Propag. 1994, 42, 840–846. [Google Scholar] [CrossRef]
- Li, L.; Tan, A.E.C.; Jhamb, K.; Rambabu, K. Characteristics of ultra-wideband pulse scattered from metal planar objects. IEEE Trans. Antenn. Propag. 2013, 61, 3197–3206. [Google Scholar] [CrossRef]
- Liang, Z.C.; Gao, W.; Fang, J.P. Narrow pulse transient scattering measurements and elimination of multi-path interference. In Proceedings of the International Symposium on Antennas & Propagation, Nanjing, China, 23–25 October 2013; pp. 408–411.
- Albani, M.; Carluccio, G.; Pathak, P.H. A uniform geometrical theory of diffraction for vertices formed by truncated curved wedges. IEEE Trans. Antenn. Propag. 2015, 63, 3136–3143. [Google Scholar] [CrossRef]
- Pathak, P.H.; Youngchel, K. A uniform geometrical theory of diffraction (UTD) for curved edges illuminated by electromagnetic beams. In Proceedings of the 2011 30th URSI General Assembly and Scientific Symposium, Istanbul, Turkey, 13–20 August 2011; pp. 1–4.
- Zhou, X.P.; Wei, G.H.; Wu, S.L.; Wang, X.; Wang, D.W. Analysis on Ultra-wideband Scattering Characteristics of Complex Missile with Empennages. J. Electron. Inform. Tech. 2015, 8, 1868–1873. [Google Scholar]
- Zhou, X.P.; Wei, G.H.; Wang, D.W.; Wu, S.L. ISAR imaging of high-speed moving targets in short-range using impulse radar. J. Syst. Eng. Electron. 2015, 26, 964–972. [Google Scholar] [CrossRef]
- Iodice, A.; Natale, A.; Riccio, D. Kirchhoff Scattering From Fractal and Classical Rough Surfaces: Physical Interpretation. IEEE Trans. Antenn. Propag. 2013, 61, 2156–2163. [Google Scholar] [CrossRef]
- Martino, G.D.; Riccio, D.; Zinno, I. SAR imaging of fractal surfaces. IEEE Trans. Geosci. Remote Sens. 2012, 50, 630–644. [Google Scholar] [CrossRef]
- Martino, G.; Iodice, D.A.; Riccio, D.; Ruello, G.; Zinno, I. Angle independence properties of fractal dimension maps estimated from SAR data. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2013, 6, 1242–1253. [Google Scholar] [CrossRef]
- Cao, N.; Bao, X.X.; Lu, H.; Wang, F.; Hu, J.R. A sea clutter modeling approach based on multifractal spectrum. In Proceedings of the 2015 10th International Conference on Intelligent Systems and Knowledge Engineering, Taipei, Taiwan, 24–27 November 2015; pp. 473–479.
- Martino, G.D.; Iodice, A.; Riccio, D.; Ruello, G. Equivalent number of scatterers for SAR speckle modeling. IEEE Trans. Geosci. Remote Sens. 2014, 52, 2555–2564. [Google Scholar] [CrossRef]
- Martino, G.D.; Iodice, A.; Riccio, D.; Ruello, G. Physical models for SAR speckle simulation. In Proceedings of the 2012 IEEE International Geoscience and Remote Sensing Symposium, Munich, Germany, 22–27 July 2012; pp. 5782–5785.
- Wei, X.J.; Xia, W.J.; Wei, J.F.; Wang, F. SAR speckle simulation based on random displacements. In Proceedings of the 2015 IEEE Radar Conference, Arlington, MA, USA, 10–15 May 2015; pp. 329–333.
- Martino, G.D.; Poderico, M.; Poggi, G.; Riccio, D.; Verdoliva, L. Benchmarking framework for SAR despeckling. IEEE Trans. Geosci. Remote Sens. 2015, 52, 1596–1615. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SNR(dB) | (m/s) | (×10−4) | (×10−4) | (×10−4) | (×10−2, m) | (×10−2, °) | (×10−2, °) |
|---|---|---|---|---|---|---|---|
| 10 | 1.19 | 26 | 22 | 20 | 33 | 19.1 | 11 |
| 12 | 0.92 | 16 | 13 | 14 | 19 | 11.8 | 8.9 |
| 14 | 0.47 | 13 | 10 | 9.6 | 14 | 9.4 | 5.5 |
| 16 | 0.20 | 7.8 | 6.6 | 6.5 | 9.1 | 5.8 | 3.7 |
| 18 | 0.08 | 5.6 | 4.6 | 4.6 | 6.6 | 4.2 | 2.6 |
| 20 | 0.06 | 4.7 | 3.9 | 3.2 | 5.5 | 3.5 | 1.8 |
| 22 | 0.04 | 3.2 | 2.6 | 2.9 | 4.2 | 2.4 | 1.6 |
| 24 | 0.03 | 2.3 | 1.9 | 2.4 | 2.9 | 1.7 | 1.4 |
| 26 | 0.02 | 2.1 | 1.7 | 1.5 | 1.9 | 1.5 | 0.9 |
| 28 | 0.02 | 1.9 | 1.6 | 1.4 | 1.5 | 1.5 | 0.8 |
| 30 | 0.01 | 2.0 | 1.6 | 1.3 | 1.4 | 1.5 | 0.7 |
| Scattering Centers i | X-axis | Y-axis | Z-axis |
|---|---|---|---|
| 1 | −1.424 | 1.186 | 0.063 |
| 2 | −1.041 | 1.508 | 0.045 |
| 3 | −0.423 | 2.165 | −0.092 |
| 4 | −0.418 | 2.170 | 0.120 |
| 5 | −0.281 | 2.007 | 0.120 |
| 6 | −0.287 | 2.003 | −0.092 |
| 7 | −0.062 | 2.597 | −0.217 |
| 8 | −0.074 | 2.282 | 0.207 |
| 9 | 0.211 | 2.607 | 0.207 |
| 10 | 0.199 | 2.273 | −0.217 |
| 11 | 1.457 | 3.745 | 0.034 |
| 12 | 1.451 | 3.582 | 0.034 |
| 13 | 1.593 | 3.578 | −0.178 |
| 14 | 1.588 | 3.740 | −0.178 |
| 15 | 1.785 | 4.298 | 0.225 |
| 16 | 2.195 | 4.283 | −0.411 |
| 17 | 1.768 | 3.796 | −0.411 |
| 18 | 2.178 | 3.810 | 0.225 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, X.; Wei, G.; Wu, S.; Wang, D. Three-Dimensional ISAR Imaging Method for High-Speed Targets in Short-Range Using Impulse Radar Based on SIMO Array. Sensors 2016, 16, 364. https://doi.org/10.3390/s16030364
Zhou X, Wei G, Wu S, Wang D. Three-Dimensional ISAR Imaging Method for High-Speed Targets in Short-Range Using Impulse Radar Based on SIMO Array. Sensors. 2016; 16(3):364. https://doi.org/10.3390/s16030364
Chicago/Turabian StyleZhou, Xinpeng, Guohua Wei, Siliang Wu, and Dawei Wang. 2016. "Three-Dimensional ISAR Imaging Method for High-Speed Targets in Short-Range Using Impulse Radar Based on SIMO Array" Sensors 16, no. 3: 364. https://doi.org/10.3390/s16030364