
A Novel RFID-Based Sensing Method for Low-Cost Bolt Loosening Monitoring

Abstract
:1. Introduction
2. Bolt Monitoring System Hardware Design
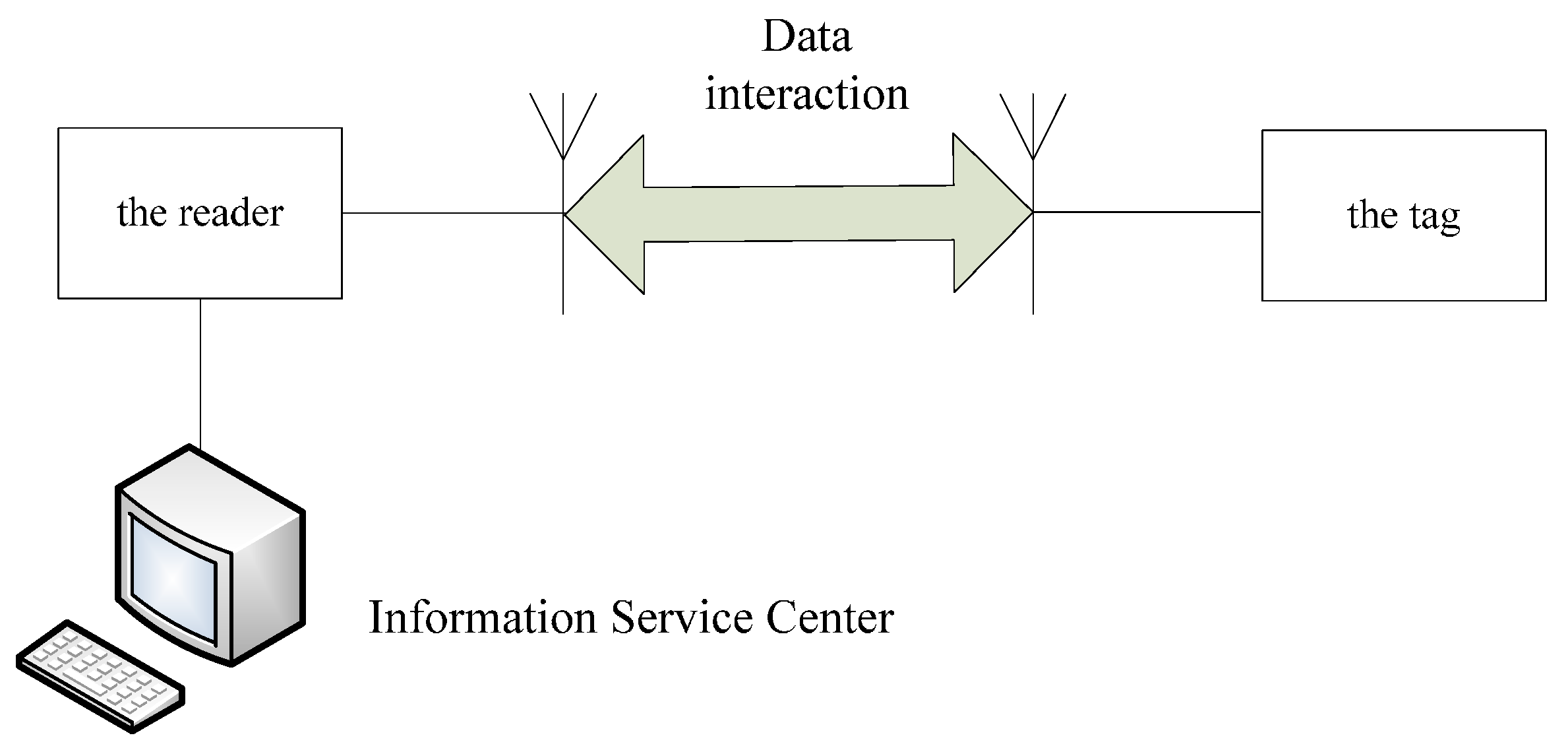
2.1. UHF Passive RFID Technology
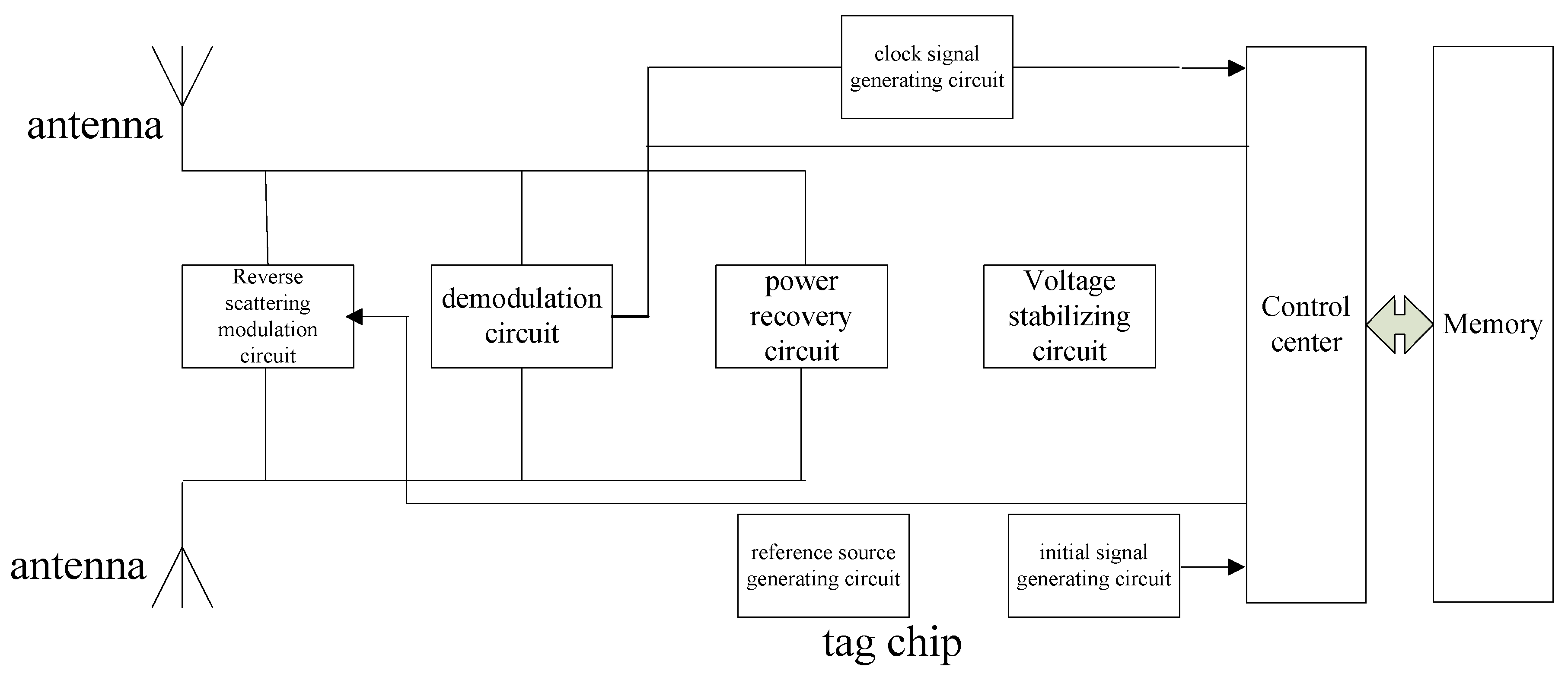
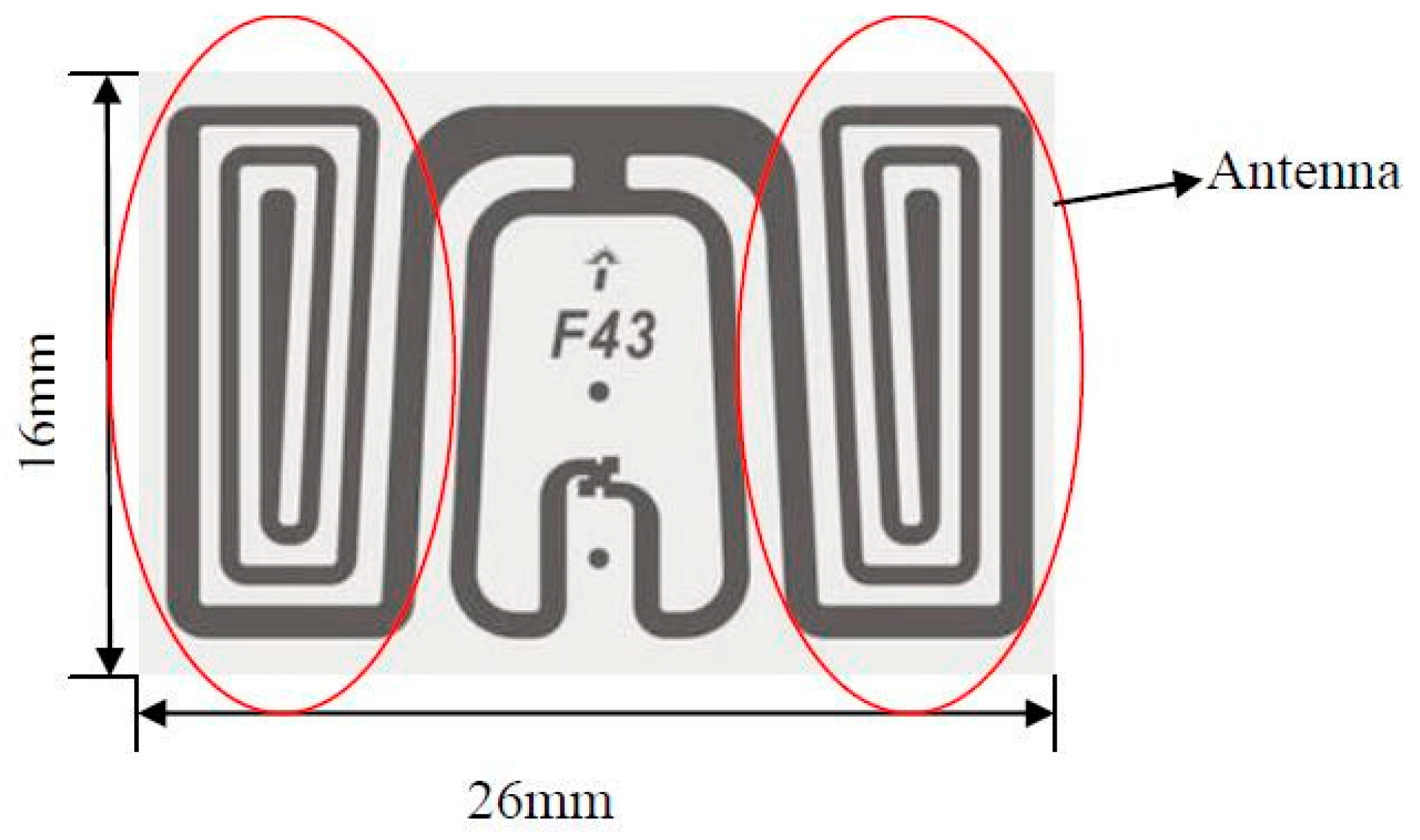
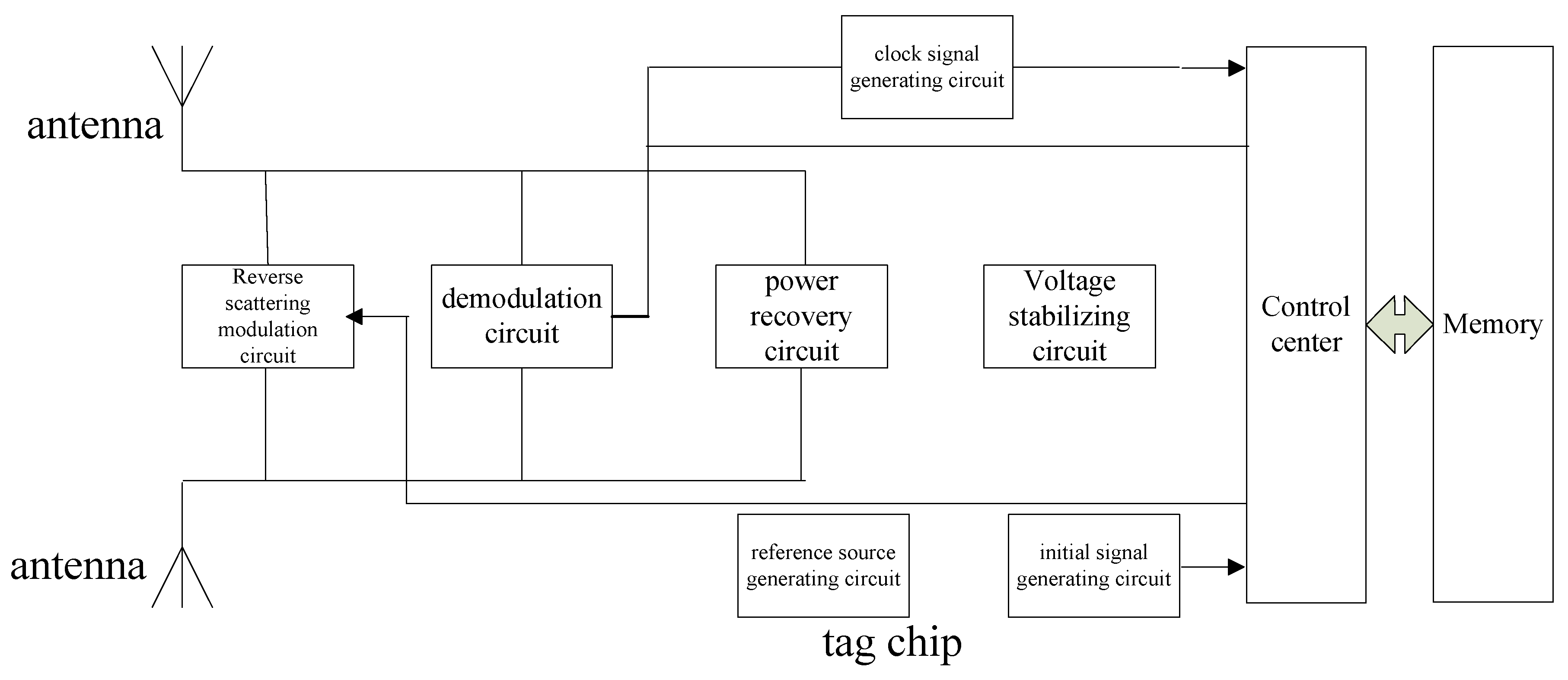
2.2. UHF Passive RFID Tag Design
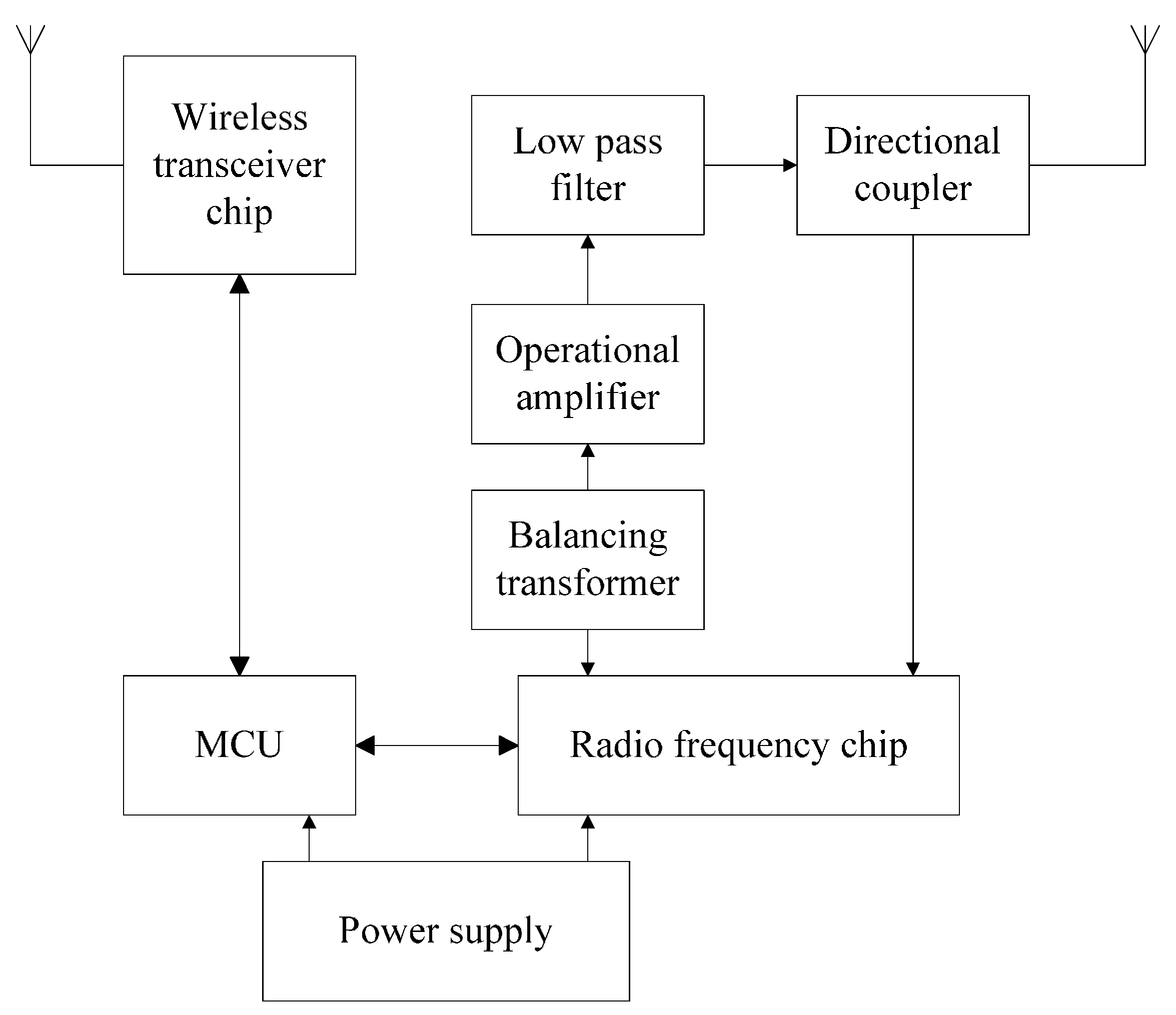
2.3. Ultra High Frequency Passive RFID Reader Design
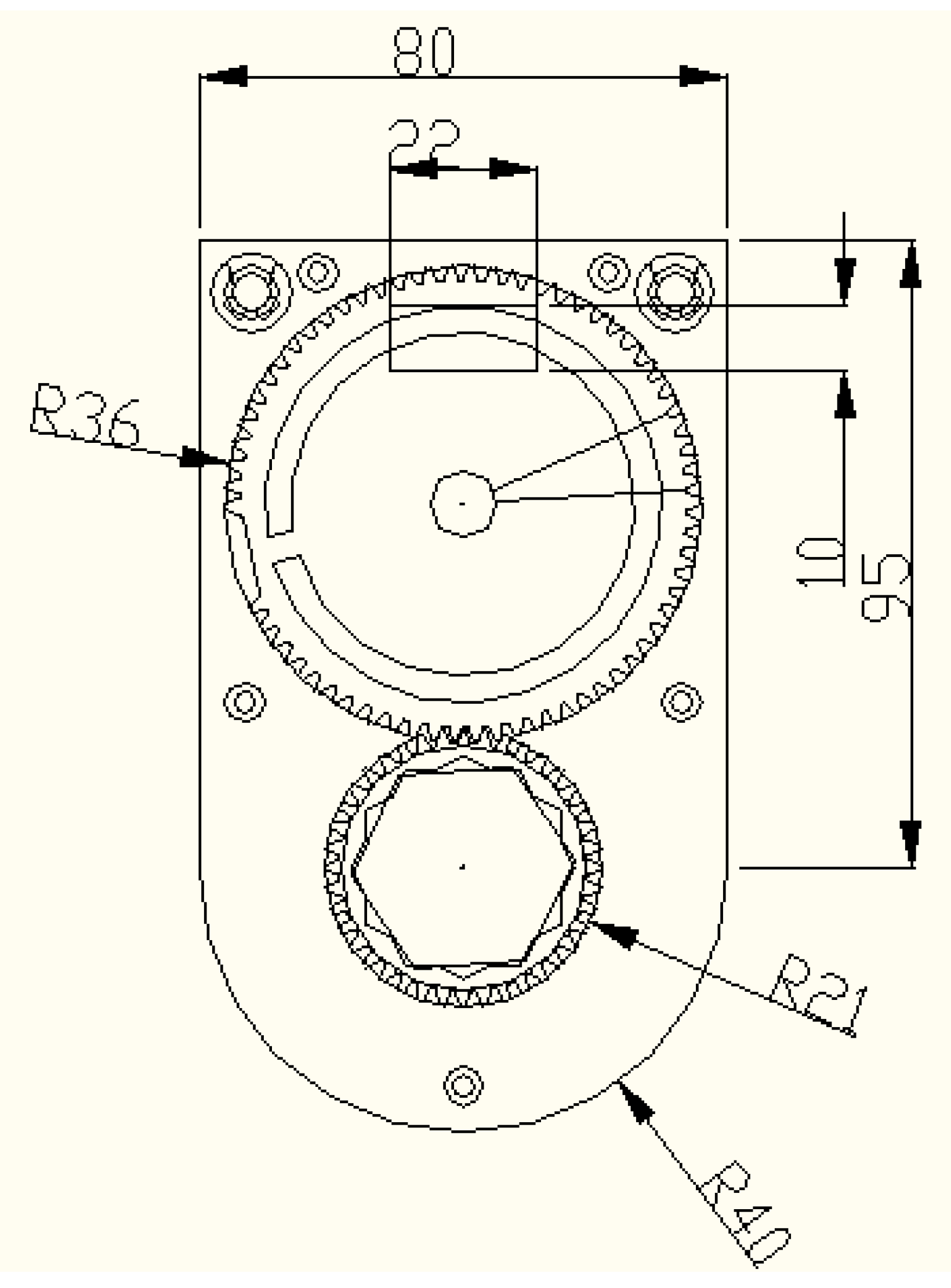
2.4. Bolt Loosening Monitoring System Based on RFID

3. RFID Reading and Writing Distance Test
3.1. Determinant Factors of RFID Reading and Writing Distance
3.2. RF Signal Strength Test



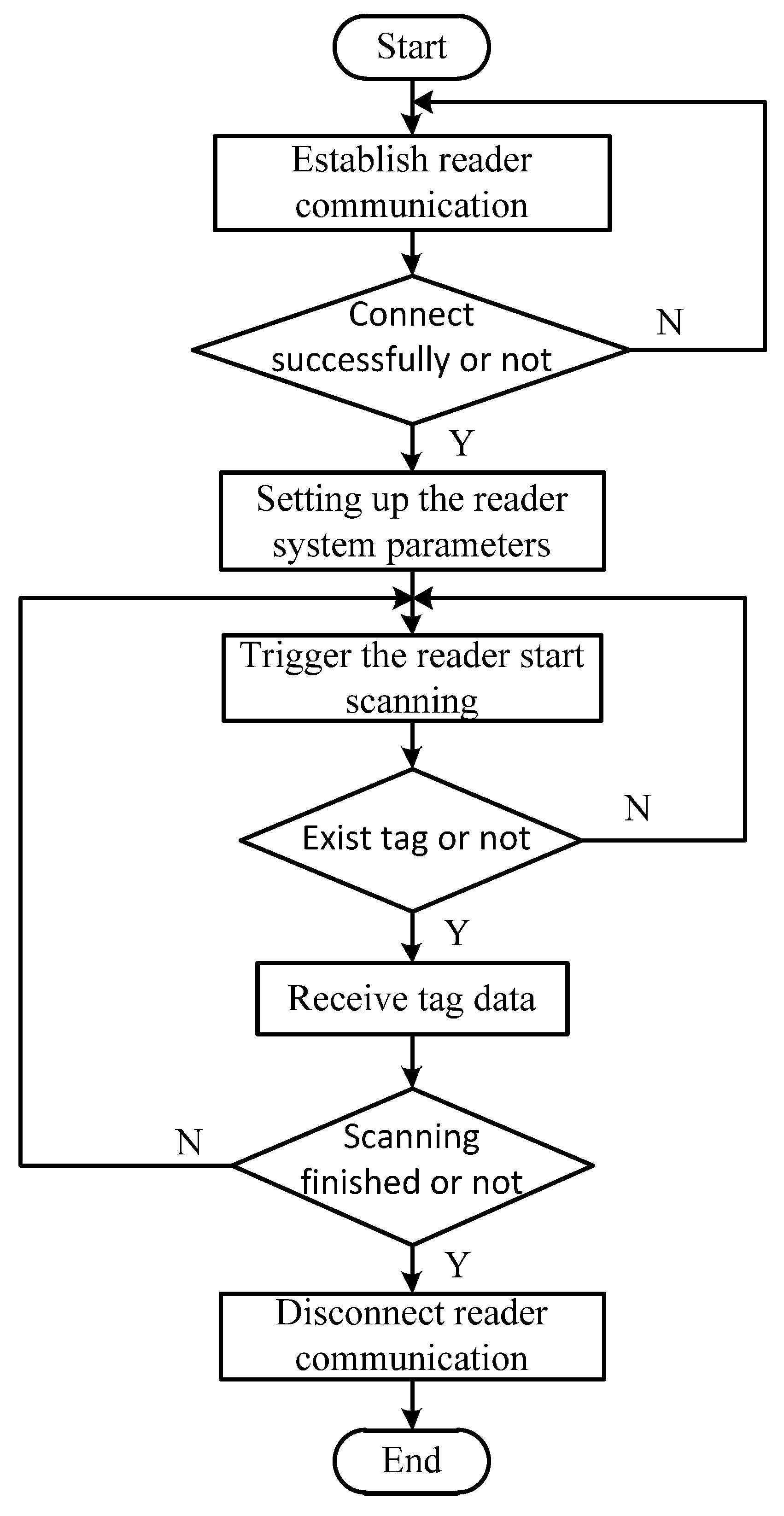
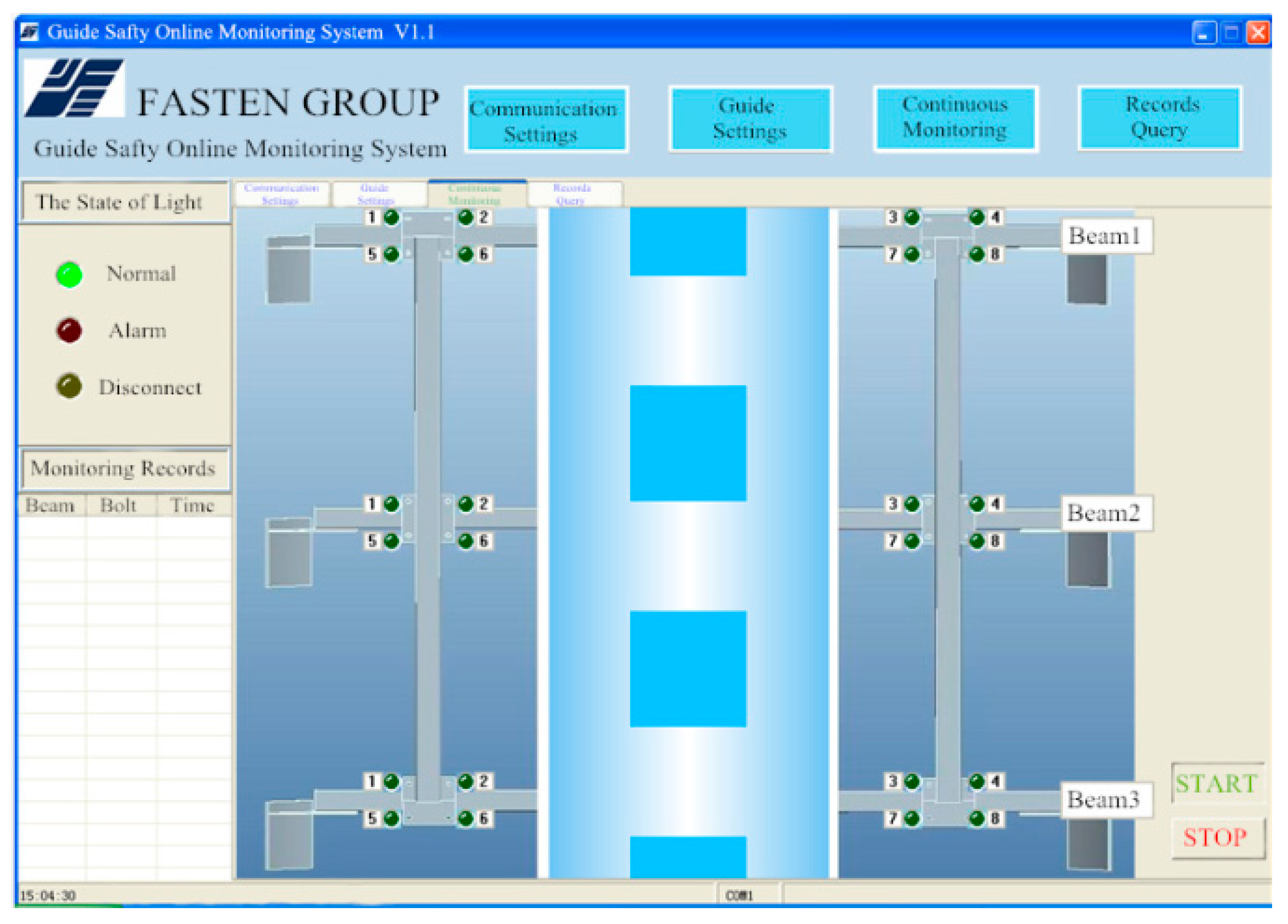
4. System Software Design
5. Confirmatory Experiments and Comparative Study
5.1. Confirmatory Experiment
5.2. Comparative Experiment
5.3. Comparative Reaserch Conclusions

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| System | Single Cost/RMB | Cost of 100 Nodes/RMB | P/mW | S/cm2 | Success Rate | Monitoring Angle |
|---|---|---|---|---|---|---|
| A | 0.3 | 830 | 0 | 1 | 99% | Approx. 20° |
| B | 10 | 1020 | 300 | 16 | 95% | 10°–12° |
6. Conclusions
- (1)
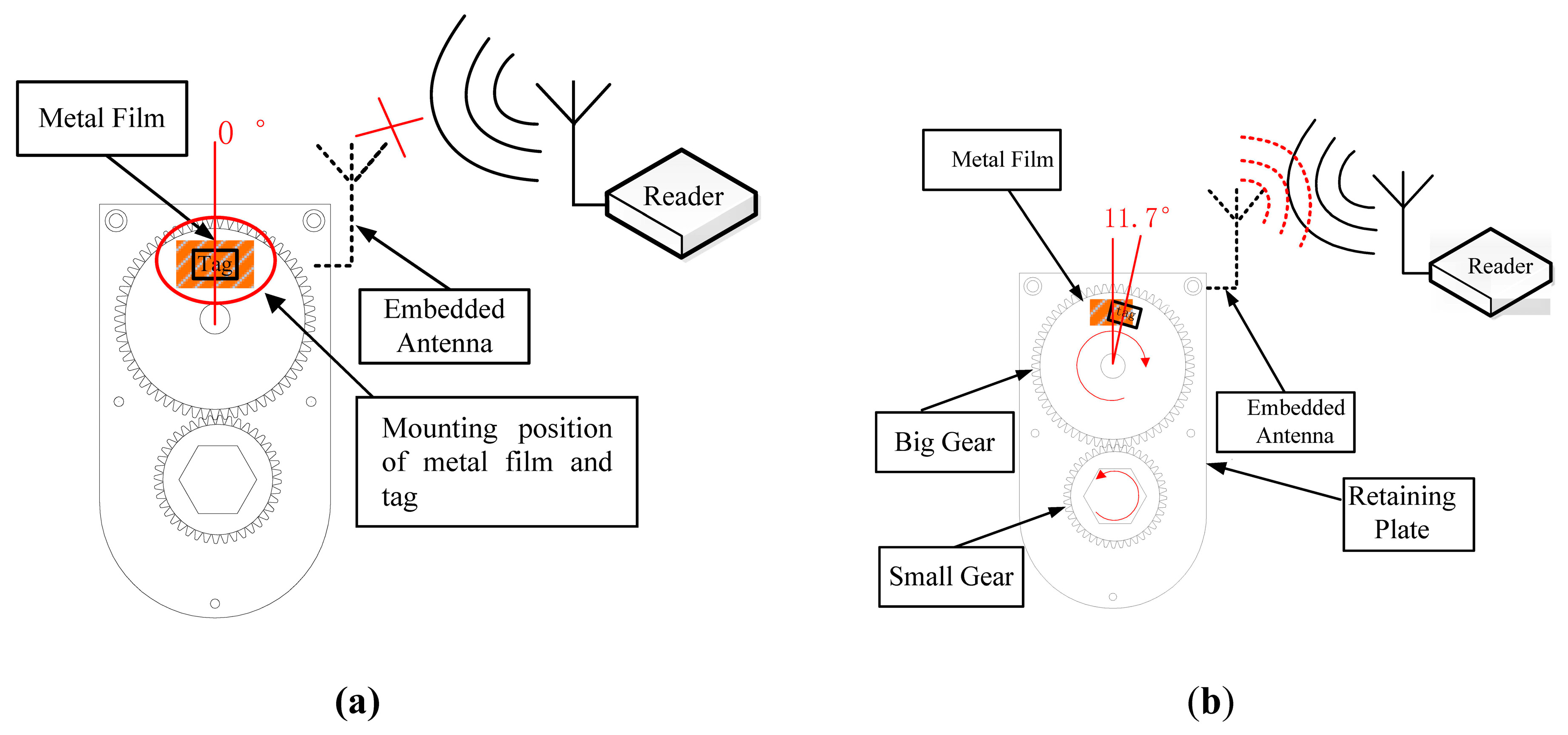
- An innovative approach to the loose bolt problem in coal mine cage guide structure, which is caused by harsh environment and many other factors, was developed in this study. The proposed monitoring system consists of a bolt gearing system, passive UHF RFID tags, metal film, reader, and monitoring software, the system utilizes passive RFID technology, as discussed at length above. Within sufficient range of communication, the reader sends radio-frequency signals to the RFID tag, which is powered by the electromagnetic wave due to coil coupling principle before sending information back to the monitor.
- (2)
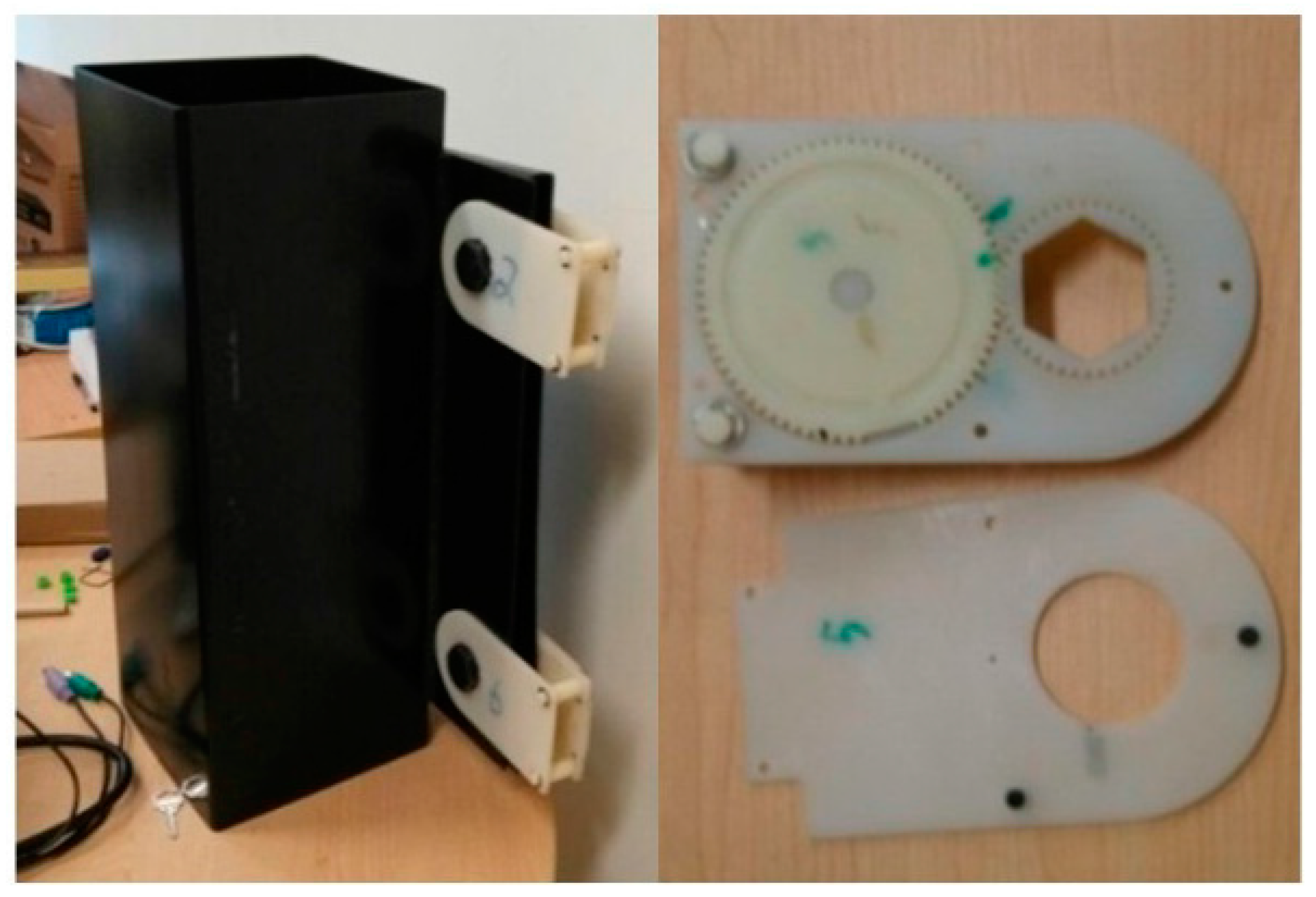
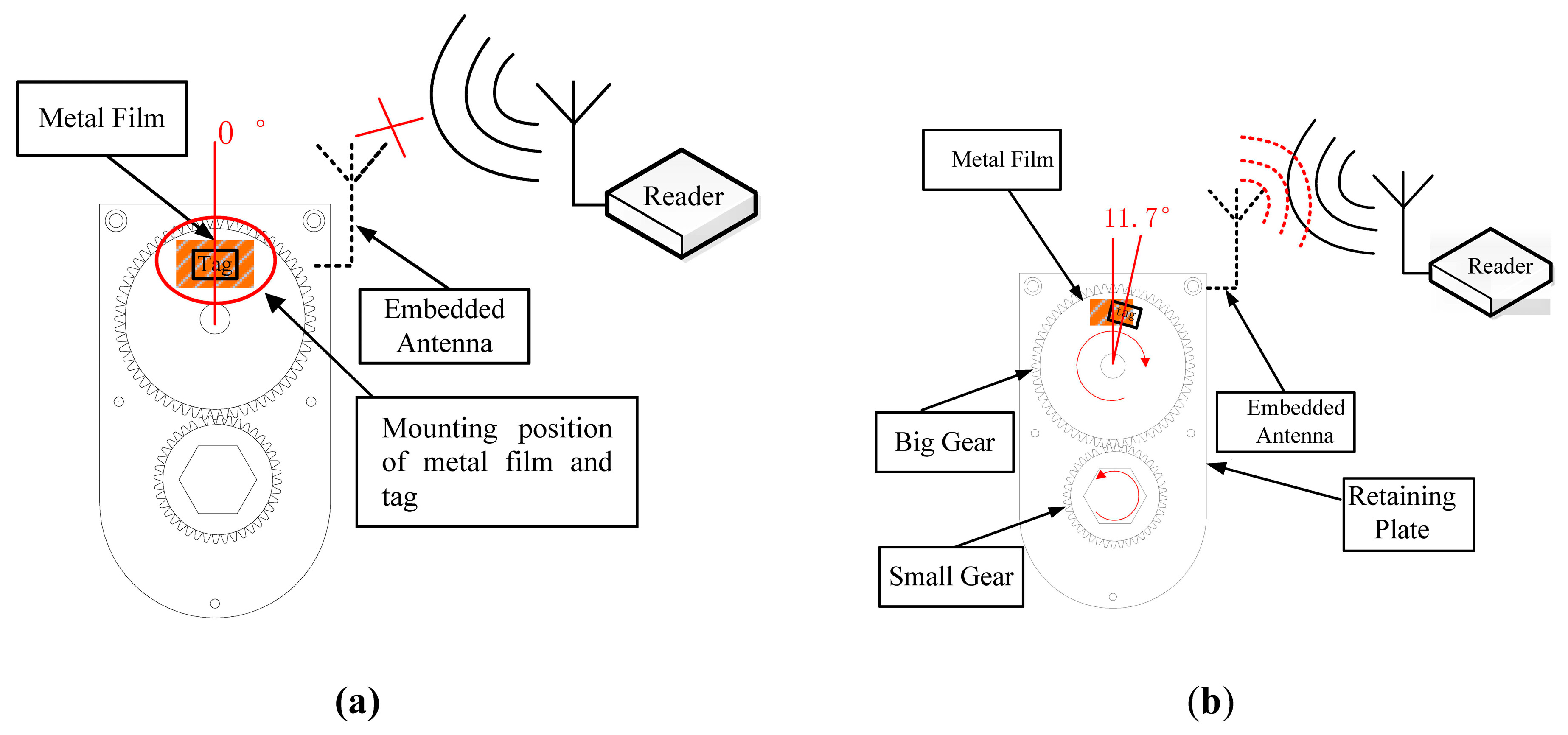
- To construct the system, an RFID tag was fixed on a large gear and a tinfoil metal film was fixed on the retaining plate. When the RFID tag is covered by the tinfoil, it is unable to communicate with the reader, the nut to be detected is fixed in the small gear’s center, so once the nut loosens, the rotation of the small gear rotates the large gear, exposing the tag antenna which then sends a radio-frequency signal from the corresponding bolt to the RFID reader and displayed on the monitoring software interface.
- (3)
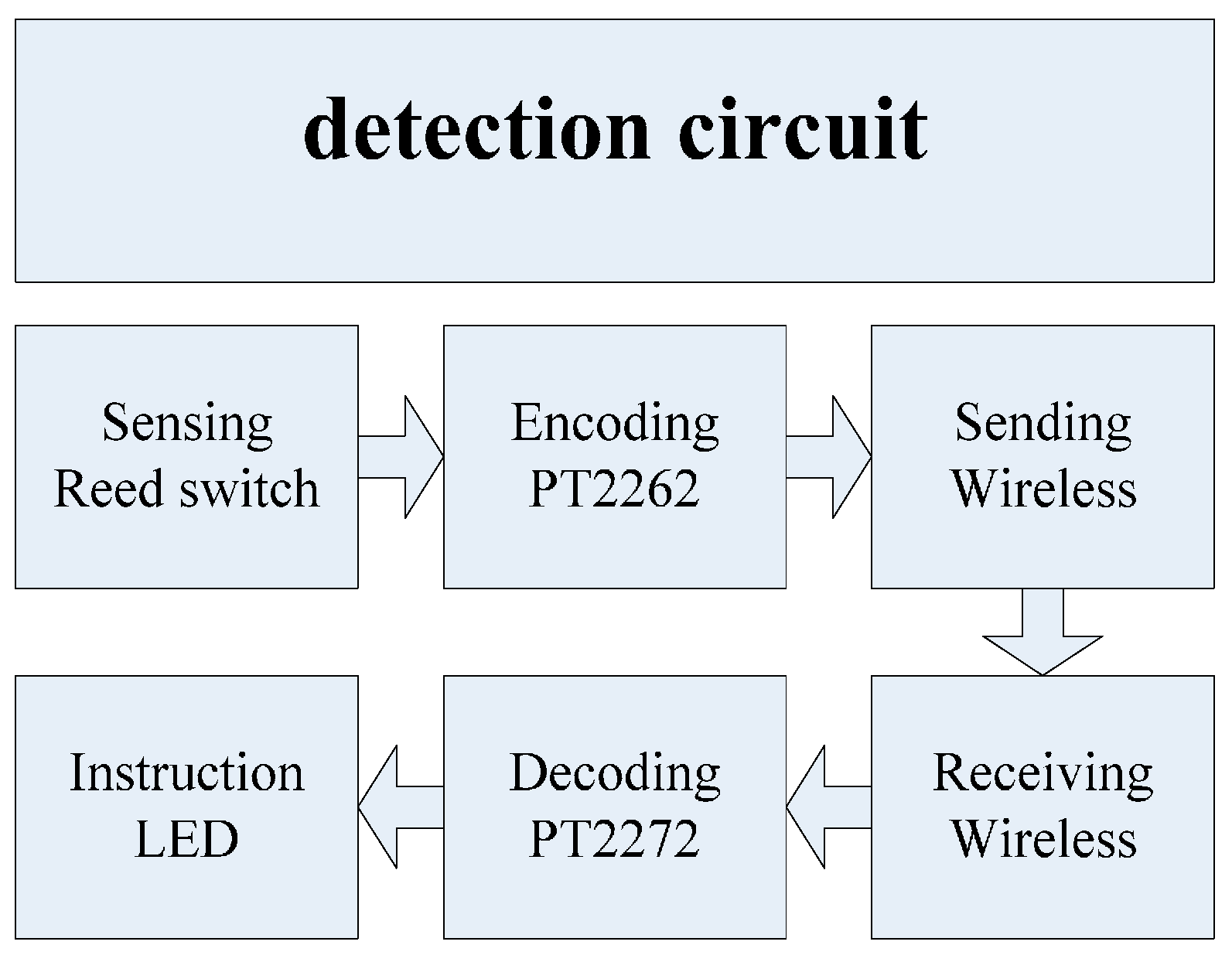
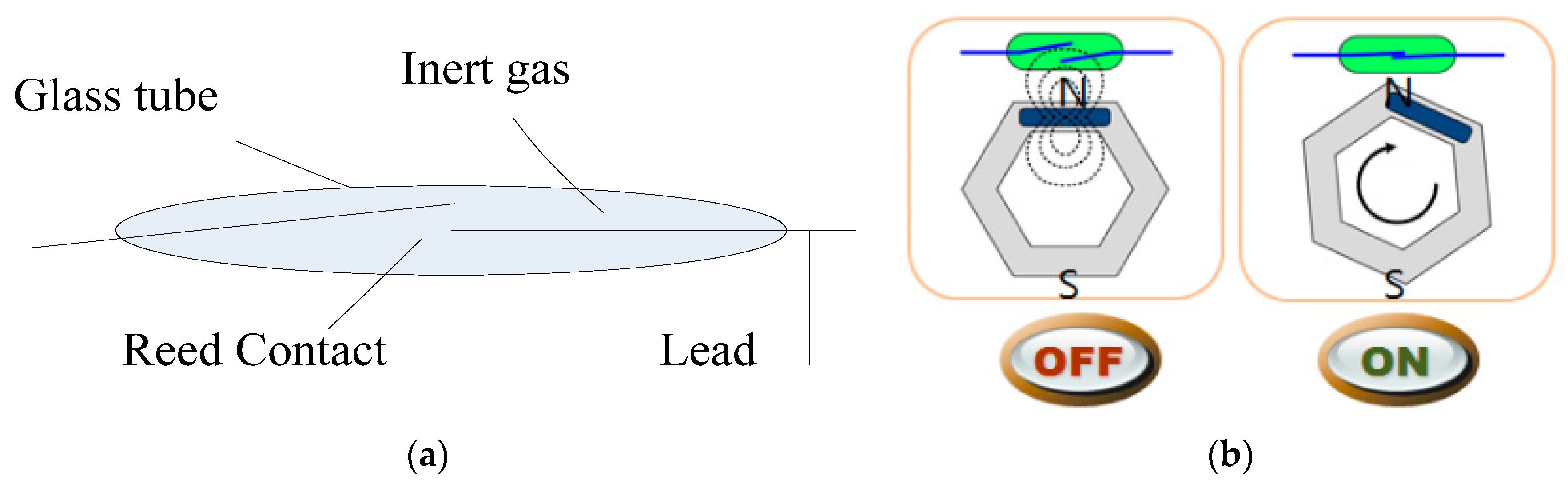
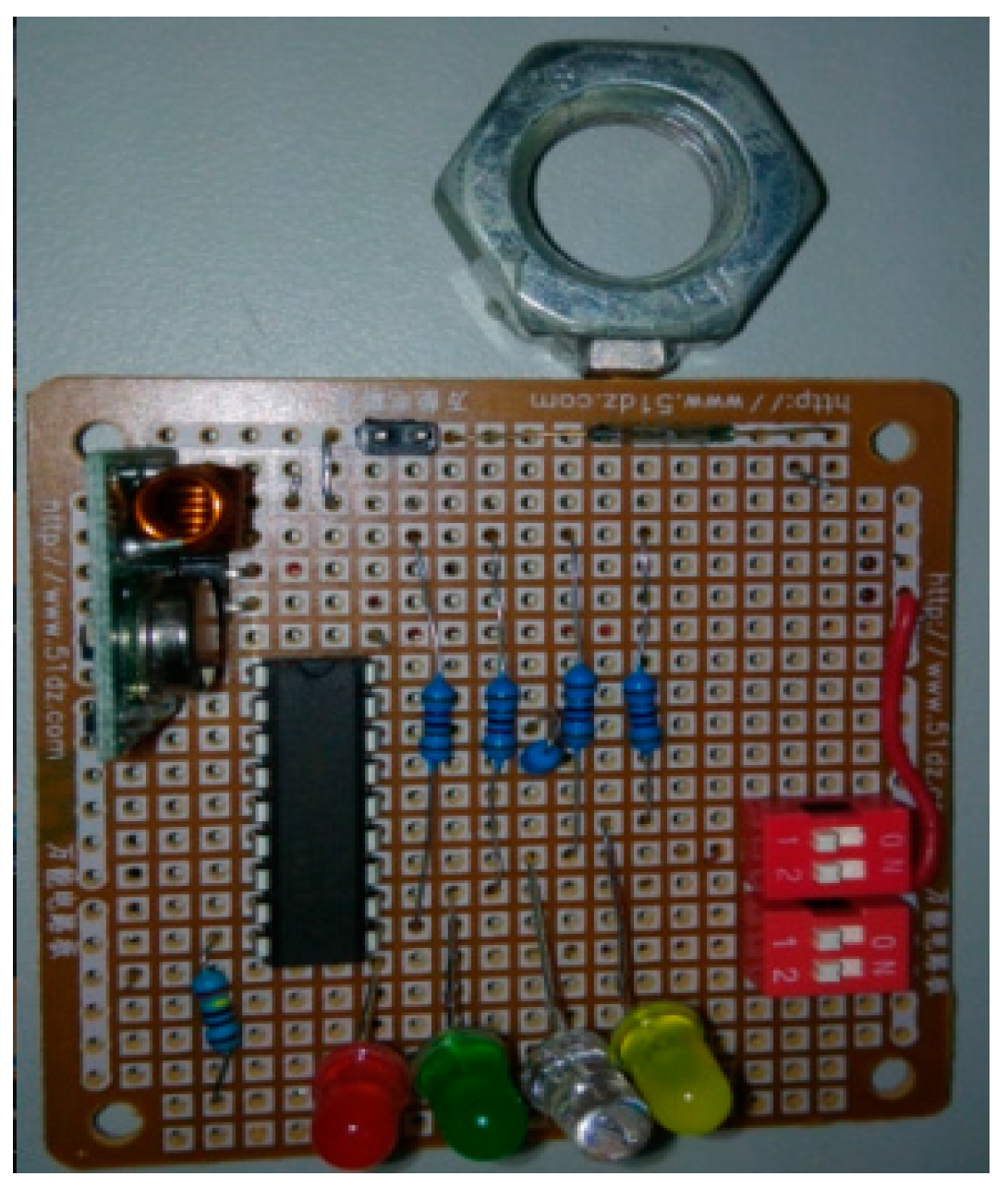
- We examined the reading distance between the reader and tag and effective distance between the tag and metal film, as well as the relationship of reading rate and reader and metal film distance all in terms of the proposed system’s feasibility and potential to be optimized successfully. A similar, proven-effective multipoint bolt loosening monitoring system based on reed switch was also tested for the sake of comparison to evaluate strengths and weaknesses of the proposed system.
- (4)
- Constrained by installation form of coal mine guide structure, the proposed system can only detect bolt loosening when nut rotational angle exceeds 20° though, the system can theoretically be further optimized by changing the radius ratio of the two gears. To this effect, the proposed method represents a good reference for use in other applications that employ bolt-nut systems.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Park, K.T.; Yu, Y.J.; Shin, H.S.; Lee, J.H.; Lee, W.S. Monitoring system for bolt joints on steel structures. In Proceedings of the SPIE Smart Structures and Materials+ Nondestructive Evaluation and Health Monitoring, International Society for Optics and Photonics, San Diego, CA, USA; 2011. [Google Scholar] [CrossRef]
- Saleem, M.; Zitoune, R.; El Sawi, I.; Bougherara, H. Role of the surface quality on the mechanical behavior of CFRP bolted composite joints. Int. J. Fatigue 2015, 11, 246–256. [Google Scholar] [CrossRef]
- Tanaka, T.; Okugawa, M. Adopting supervisor for bolt loosening detection by using smart washer. In Proceedings of the ASME 2008 Conference on Smart Materials, Adaptive Structures and Intelligent Systems, Ellicott City, MD, USA, 28–30 October 2008.
- Ahn, J.M.; Suh, J.T. Detection of locking bolt loosening in the stem-condyle junction of a modular femoral stem in revision total knee arthroplasty. J. Arthroplast. 2010, 25, 660. [Google Scholar] [CrossRef] [PubMed]
- Woo, T.K.; Hwang, B.C.; Jang, Y.J.; Kim, C. Preventing loose bolts and reducing the number of bolts required in plate heat exchangers. Int. J. Precis. Eng. Manuf. 2009, 10, 29–34. [Google Scholar] [CrossRef]
- Mascarenas, D.L.; Todd, M.D.; Park, G.; Farrar, C.R. Remote inspection of bolt joints using RFID-tagged piezoelectric sensors. In Proceedings of the Society for Experimental Mechanics Series, New York, NY, USA, 2 February 2006.
- Dosch, S.; Spohrer, A.; Fleischer, J. Reduced commissioning time of components in machine tools through electronic data transmission. In Proceedings of the 22nd CIRP Conference on Life Cycle Engineering (LCE), Sydney, Australia, 7–9 April 2015.
- Badia-Melis, R.; Ruiz-Garcia, L.; Garcia-Hierro, J.; Villalba, J.I.R. Refrigerated Fruit Storage Monitoring Combining Two Different Wireless Sensing Technologies: RFID and WSN. Sensors 2015, 15, 4781–4795. [Google Scholar] [CrossRef] [PubMed]
- Steinberg, I.M.; Steinberg, M.D. Radio frequency tag with optoelectronic interface for distributed wireless chemical and biological sensor applications. Sens. Actuators B Chem. 2009, 138, 120–125. [Google Scholar] [CrossRef]
- Gasco, F.; Feraboli, P.; Braun, J.; Smithb, J.; Stickler, P.; DeOto, L. Wireless strain measurement for structural testing and health monitoring of carbon fiber composites. Compos. Part A Appl. Sci. Manuf. 2011, 42, 1263–1274. [Google Scholar] [CrossRef]
- Liu, D.; Wang, R.; Yao, K.; Zou, X.; Guo, L. Design and Implementation of a RF Powering Circuit for RFID Tags or Other Batteryless Embedded Devices. Sensors 2014, 14, 14839–14857. [Google Scholar] [CrossRef] [PubMed]
- Deng, F.; He, Y.; Zhang, C.; Feng, W. A CMOS Humidity Sensor for Passive RFID Sensing Applications. Sensors 2014, 14, 8728–8739. [Google Scholar] [CrossRef] [PubMed]
- Want, R. An introduction to RFID technology. Pervasive Comput. 2006, 5, 25–33. [Google Scholar] [CrossRef]
- Lee, S.Y. An experimental studies on the relaxation and slip behavior of coated joints fastened with high tension bolts. J. Korean Soc. Civil Eng. 1999, 19, 697–705. [Google Scholar]
- Joho, D.; Plagemann, C.; Burgard, W. Modeling RFID signal strength and tag detection for localization and mapping. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Kobe, Japan, 12–17 May 2009; pp. 3160–3165.
- Brchan, J.L.; Zhao, Z.L.; Wu, J.Q. A real-time RFID localization experiment using propagation models. In Proceedings of the 2012 IEEE International Conference on RFID (RFID), Orlando, FL, USA, 3–5 April 2012; pp. 141–148.
- Kuester, G.; Novotny, D. Forward and reverse link constraints in UHF RFID with Passive Tag. In Proceedings of the 2010 IEEE International Symposium on Electromagnetic Compatibility (EMC), Fort Lauderdale, FL, USA, 25–30 July 2010; pp. 680–685.
- Nikitin, P.; Rao, K. Antennas and propagation in UHF RFID systems. In Proceedings of the 2008 IEEE International Conference on RFID, Las Vegas, NV, USA, 16–17 April 2008; pp. 277–288.
- Paul, G. Engineering management-focused radio frequency identification (RFID) model solutions. Eng. Manag. Rev. 2007, 35, 20–30. [Google Scholar]
- Xu, Y.P.; Wu, J.; Shang, F.; He, B.X. Low-Cost Wireless Sensor Network Node Design for Multi-Point Bolt Loosening Detection. Trans. Nanjing Univ. Aeronaut. Astronaut. 2015, 32, 318–324. [Google Scholar]
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, J.; Cui, X.; Xu, Y. A Novel RFID-Based Sensing Method for Low-Cost Bolt Loosening Monitoring. Sensors 2016, 16, 168. https://doi.org/10.3390/s16020168
Wu J, Cui X, Xu Y. A Novel RFID-Based Sensing Method for Low-Cost Bolt Loosening Monitoring. Sensors. 2016; 16(2):168. https://doi.org/10.3390/s16020168
Chicago/Turabian StyleWu, Jian, Xingmei Cui, and Yunpeng Xu. 2016. "A Novel RFID-Based Sensing Method for Low-Cost Bolt Loosening Monitoring" Sensors 16, no. 2: 168. https://doi.org/10.3390/s16020168
APA StyleWu, J., Cui, X., & Xu, Y. (2016). A Novel RFID-Based Sensing Method for Low-Cost Bolt Loosening Monitoring. Sensors, 16(2), 168. https://doi.org/10.3390/s16020168