
Queuing Time Prediction Using WiFi Positioning Data in an Indoor Scenario




Abstract
:1. Introduction
- Video Surveillance. By employing video content analytics to detect the number of people queuing and to estimate the time needed to leave the queue [4,5,6], the queuing time of an individual who is just entering a queue can be estimated [7] using the following equation:where is the density function of the number of people in the queue, and is the density function of service time. However, video surveillance may compromise individual privacy, and in large-scale areas where the number of people queuing is large and the queue structure is complex, people counting may have poor accuracy.
- Radio Frequency Identification (RFID). By using the protocol for communication between user tags and fixed readers near the counter [8]), RFID readers can detect the existence of nearby tags. The queuing parameters can be tracked based on the number of detected tags and signal strength [9]. However, RFID is not a commonly used technology, so extra hardware and individuals’ active participation are required, which may not be accepted by managers and users.
- Bluetooth. An individual’s position with time stamps can be acquired using Bluetooth localization [10,11] with positioning methods such as proximity, trilateration, and fingerprinting. Then, the queue entry and exit times [12] can be determined based on the relationship between a queue process and a spatial location to estimate the queuing time. Queuing time estimation using Bluetooth is highly accurate. However, special equipment is needed to detect the Bluetooth signals from the users’ mobile devices.
- Accelerometer. The accelerometers built into mobile devices can be used to record a user’s continuous movement [13] (based on acceleration parameters). An individual’s movement while queuing is essentially standing-walking-standing [14], which is reflected by fluctuation in the acceleration curve. Using pattern recognition [15], the queuing period can be determined based on moving status; thus, queuing time be calculated. However, users must install an application on their mobile device to continuously upload their moving status data.All of the techniques mentioned above can be used to monitor queuing activity and automatically estimate queuing parameters. However, in practice, these techniques have three main deficiencies: they require extra equipment to track queuing activity, they require active participation, and they may compromise individuals’ privacy.
- WiFi. WiFi is mainly used for wireless Internet access equipment in public places and private homes. In addition to the communication function, WiFi is widely used in indoor navigation [16,17], targeted advertisements [18,19], and behavior analysis [20,21]. However, little research has been conducted on the use of WiFi for queuing time monitoring. This technique overcomes the disadvantages of other approaches. In previous studies, users were required to install an app on their mobile device to communicate signal information with the backend. WiFi queuing time monitoring methods can be divided into two categories: (1) signal threshold judgment; and (2) signal feature analysis.
1.1. Signal Threshold Judgment
1.2. Signal Feature Analysis
- (1)
- The method for estimating the queuing time from topological relation judgment between individuals’ trajectories and the queue zone is robust in realistic application scenarios.
- (2)
- No special sensors are needed to track people’s queuing activity, because WiFi and mobile devices are ubiquitous in modern life.
- (3)
- Users are passive because no active cooperation is required and no additional apps need to be installed on their mobile devices.
- (4)
- No consideration for the length or shape of the queue is required because queuing time only depends on the time stamps when an individual enters and leaves a queue zone.
2. Theory and Methodological Framework
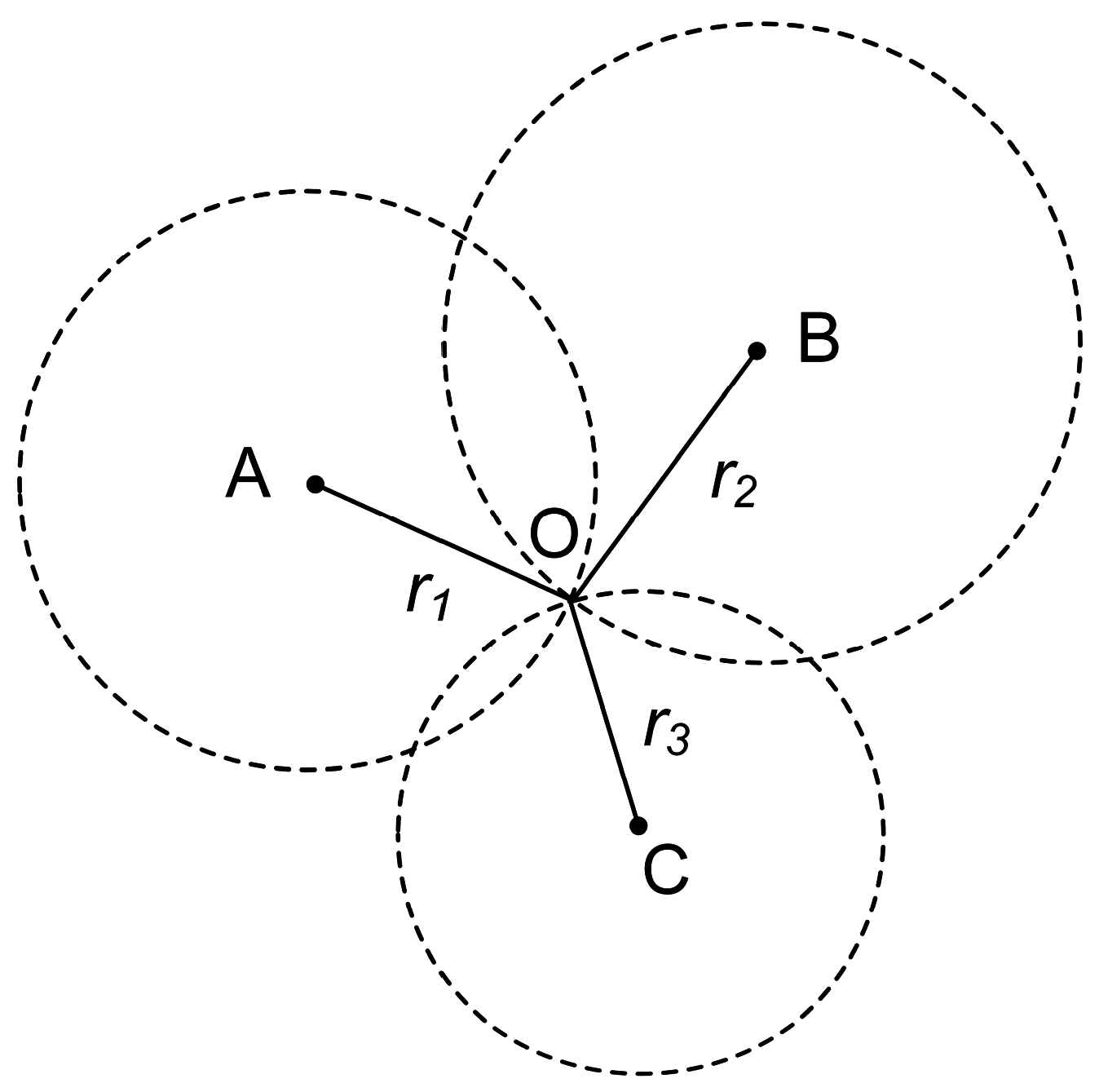
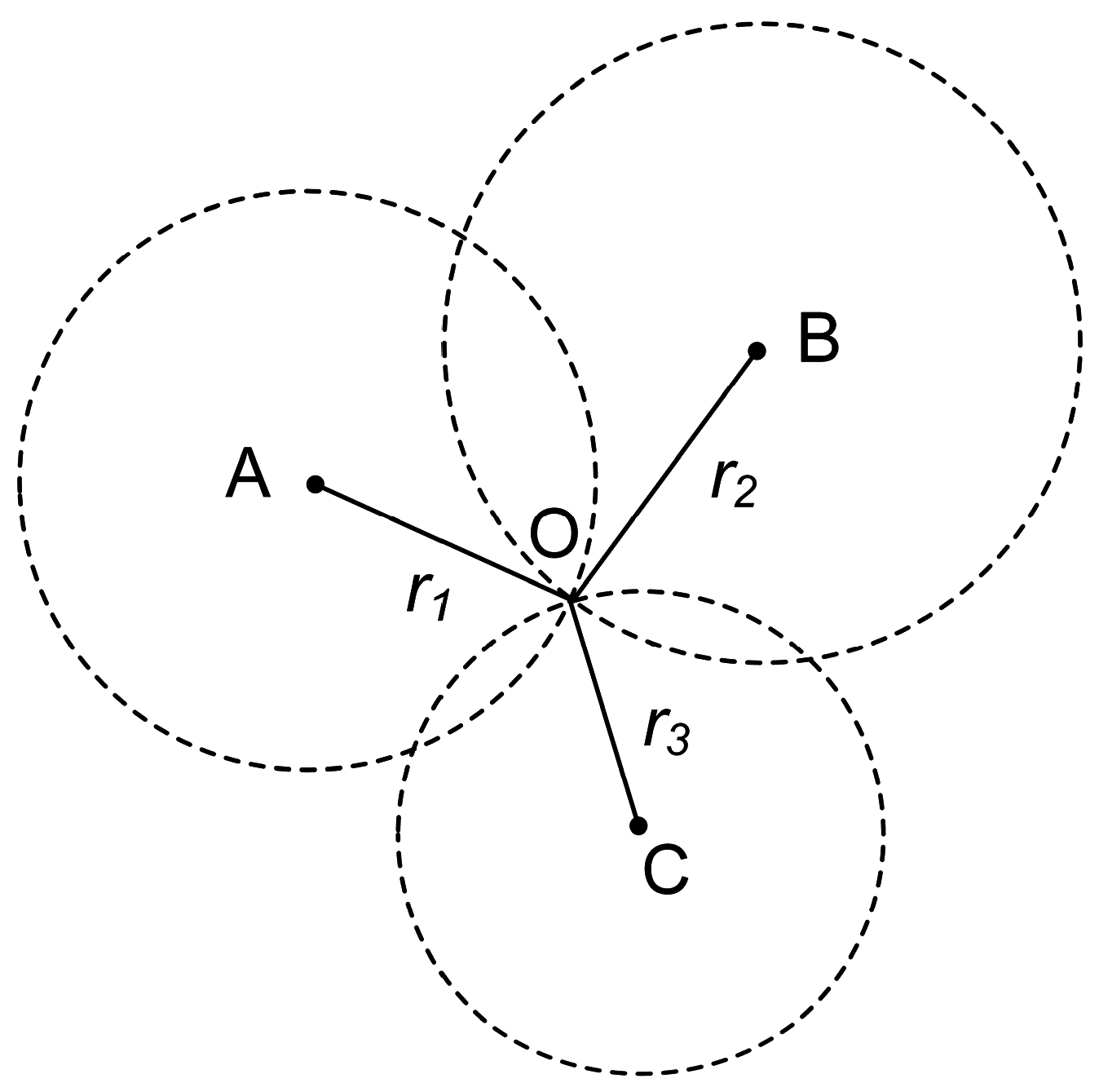
2.1. WiFi Positioning Technology
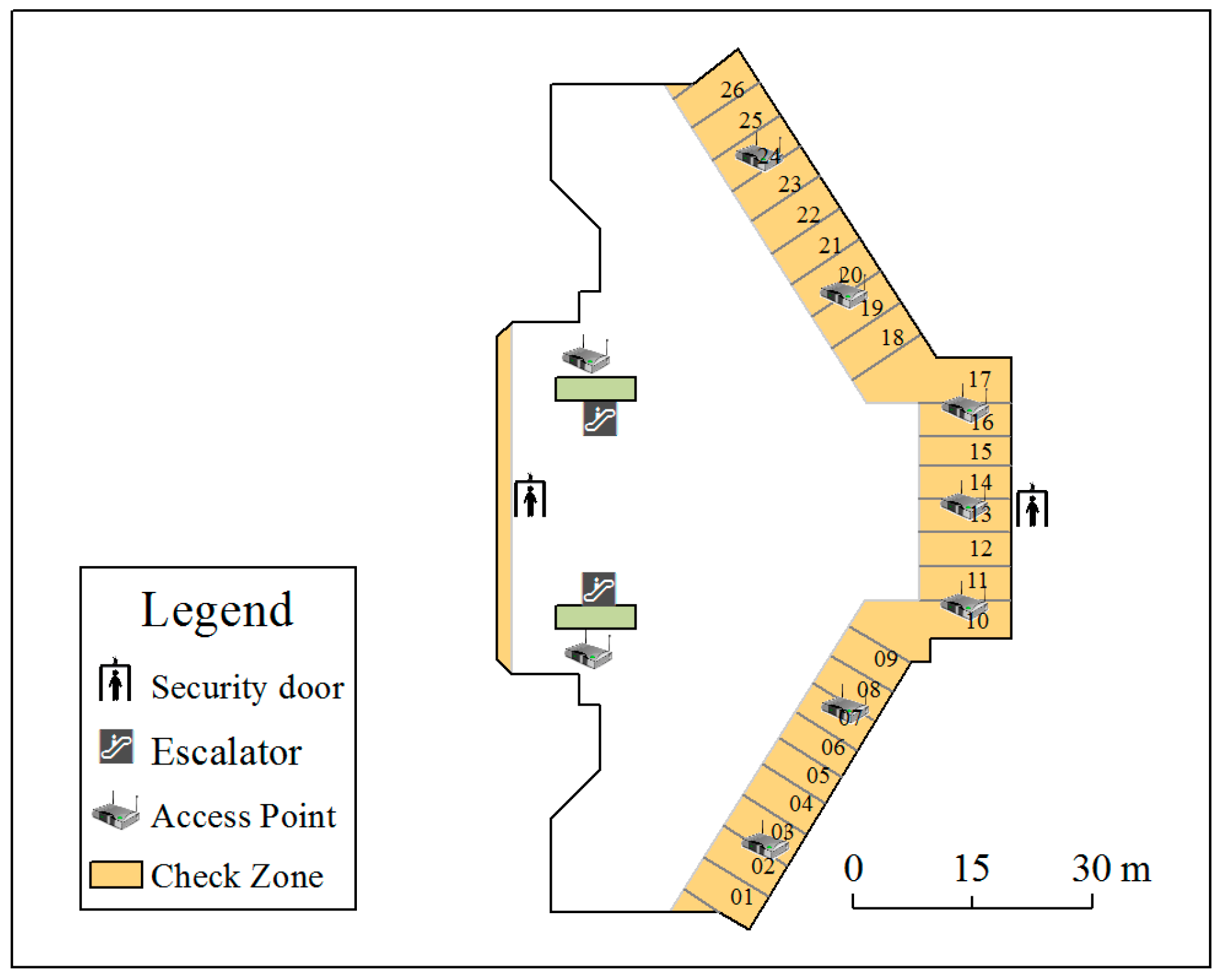
2.2. Hardware Deployment Principles
2.3. Queuing Time Estimation Based on Positioning Data
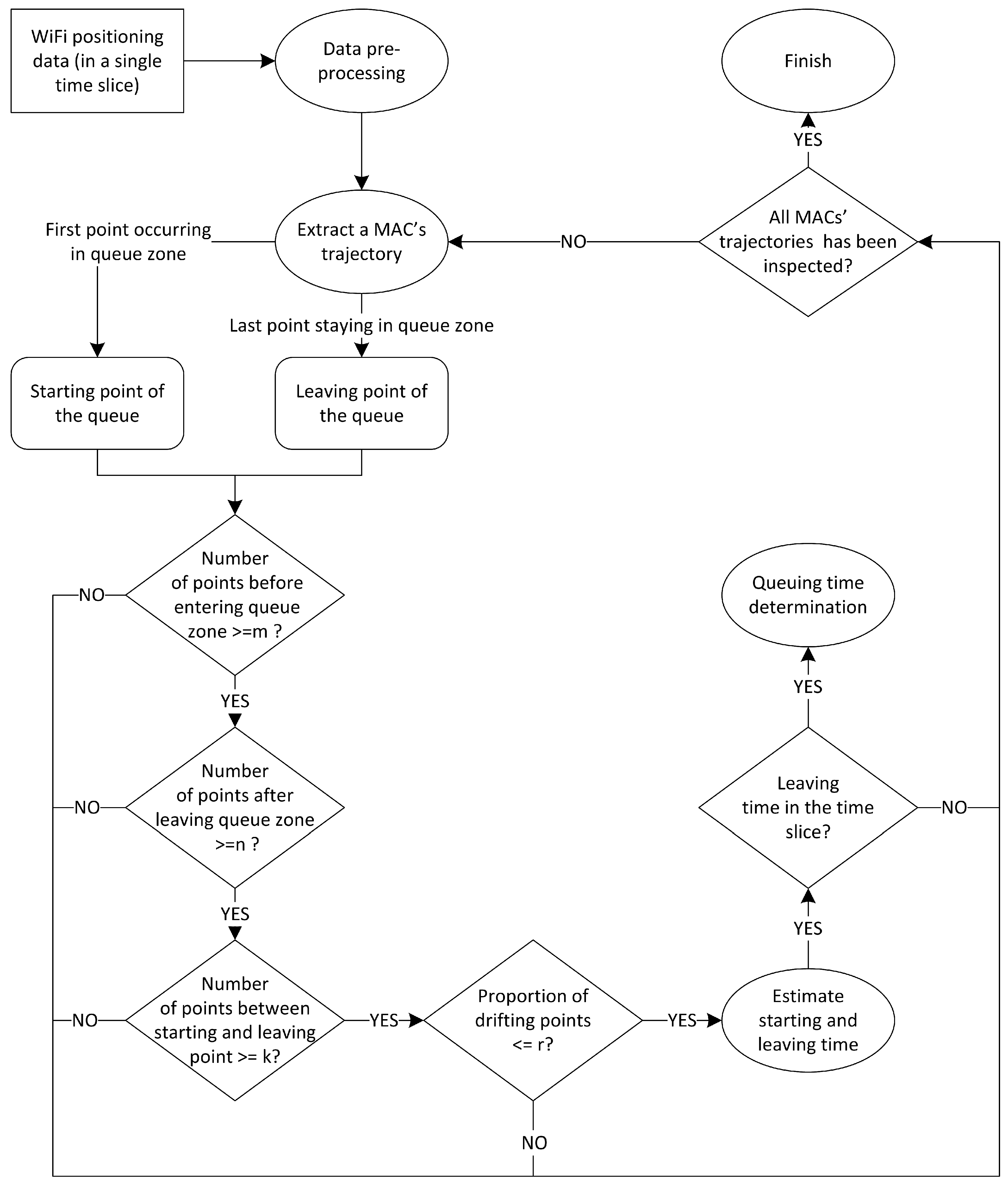
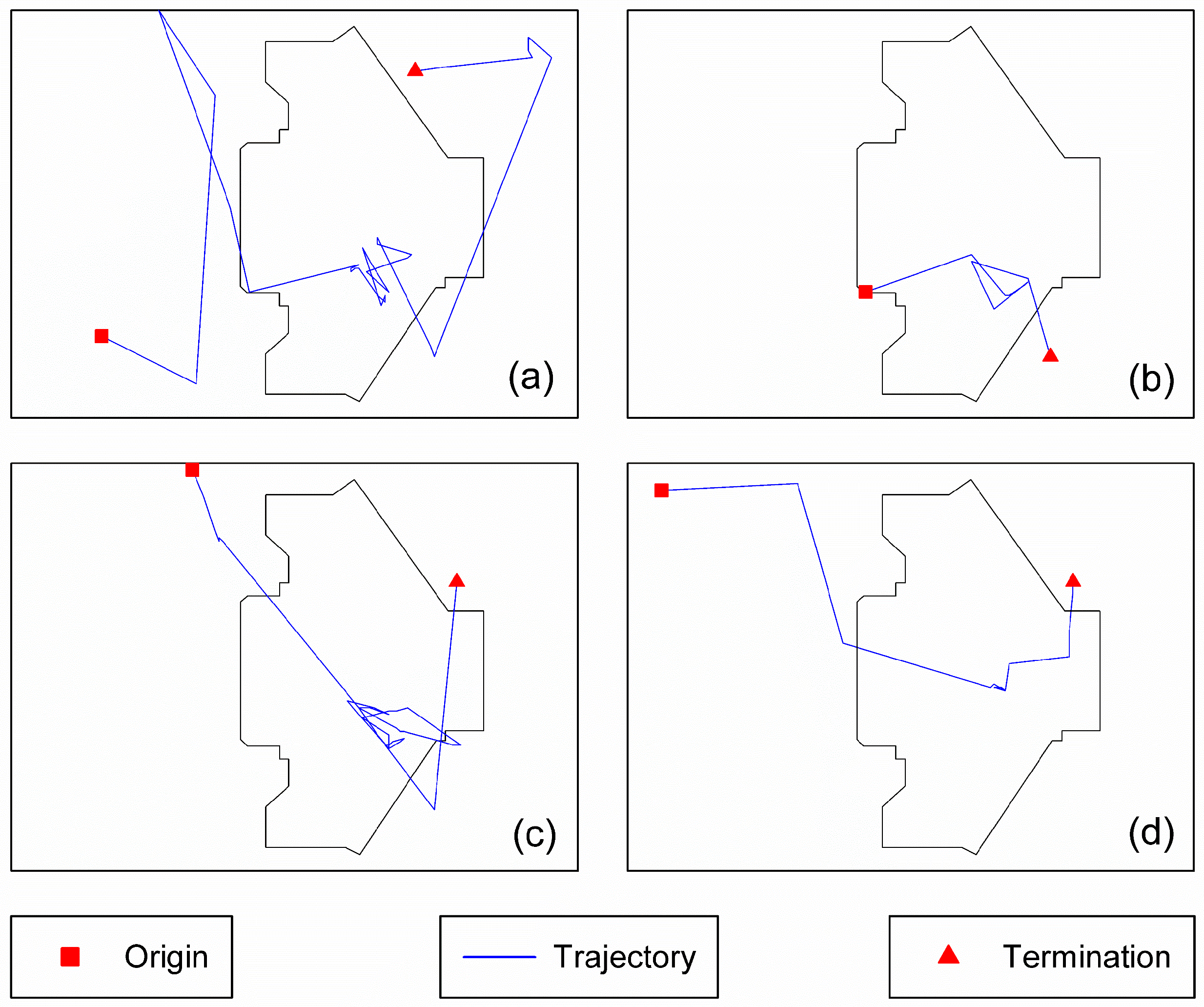
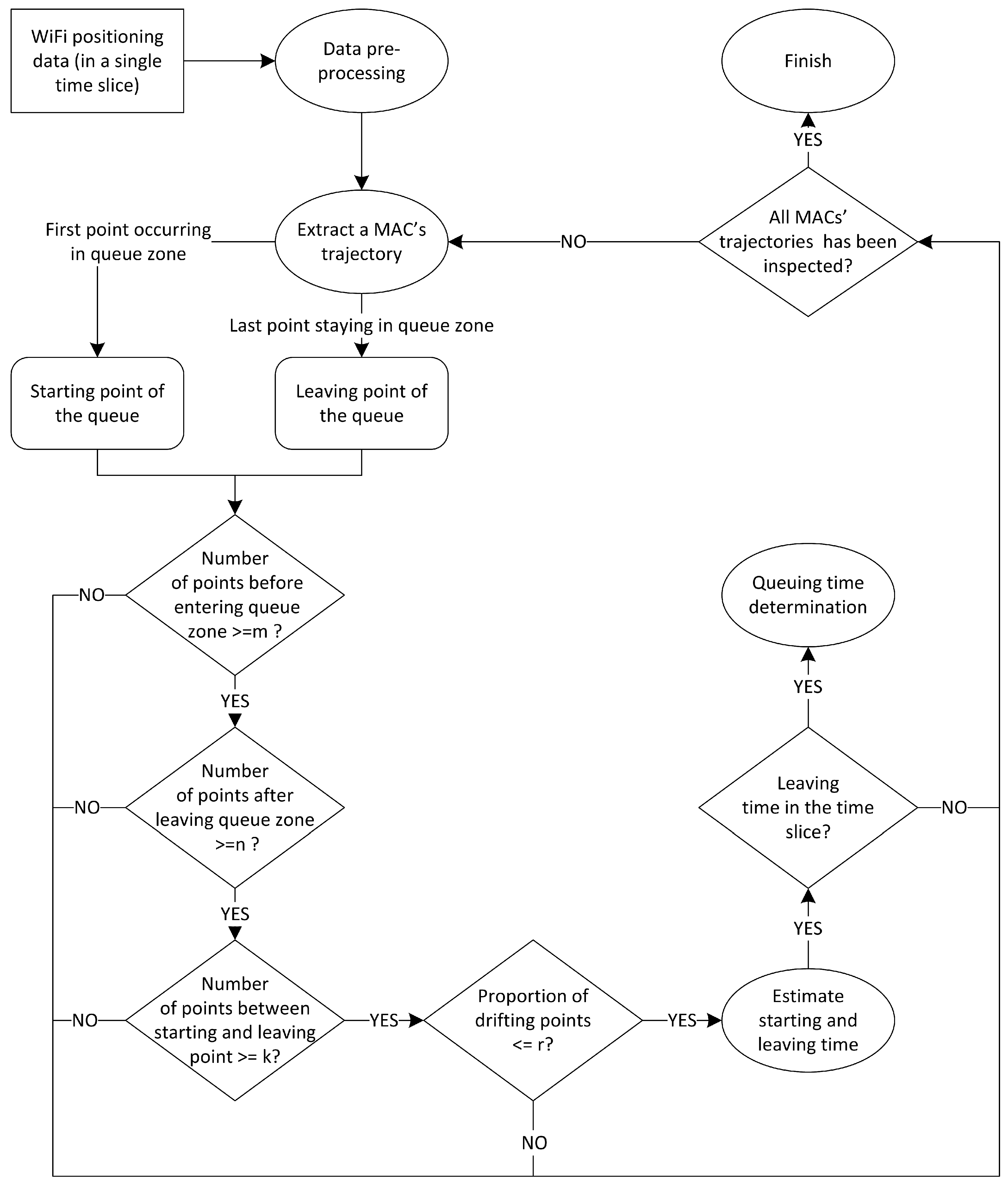
2.3.1. Queuing Process Recognition
2.3.2. Parameter Setting and Queuing Time Determination
2.3.3. Queuing Time Estimation
2.4. Queuing Time Prediction
2.4.1. Nonstandard Autoregressive
2.4.2. Holt-Winters
2.4.3. Seasonal Trend Decomposition with Autoregressive Integrated Moving Average (STL-ARIMA)
3. Methodology Validation
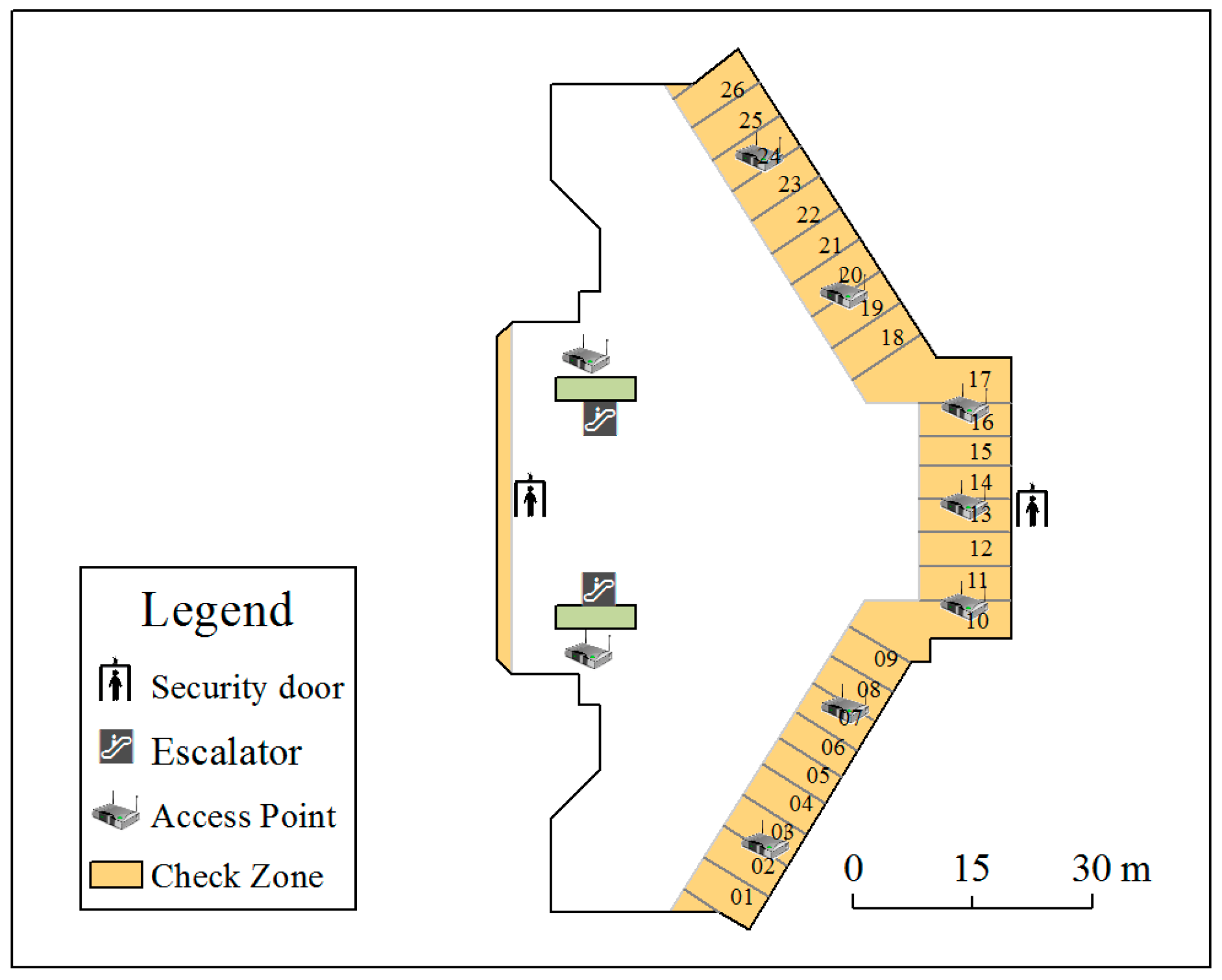
3.1. Positioning System Deployment
3.2. Topological Accuracy Test
3.3. WiFi-Based Estimation Model Validation
4. Case Study
4.1. Queuing Time Estimation for the T3-C Entrance of Beijing Capital International Airport
4.1.1. Data Collection
4.1.2. Data Preprocessing
4.1.3. Parameter Calibration and Queuing Time Determination
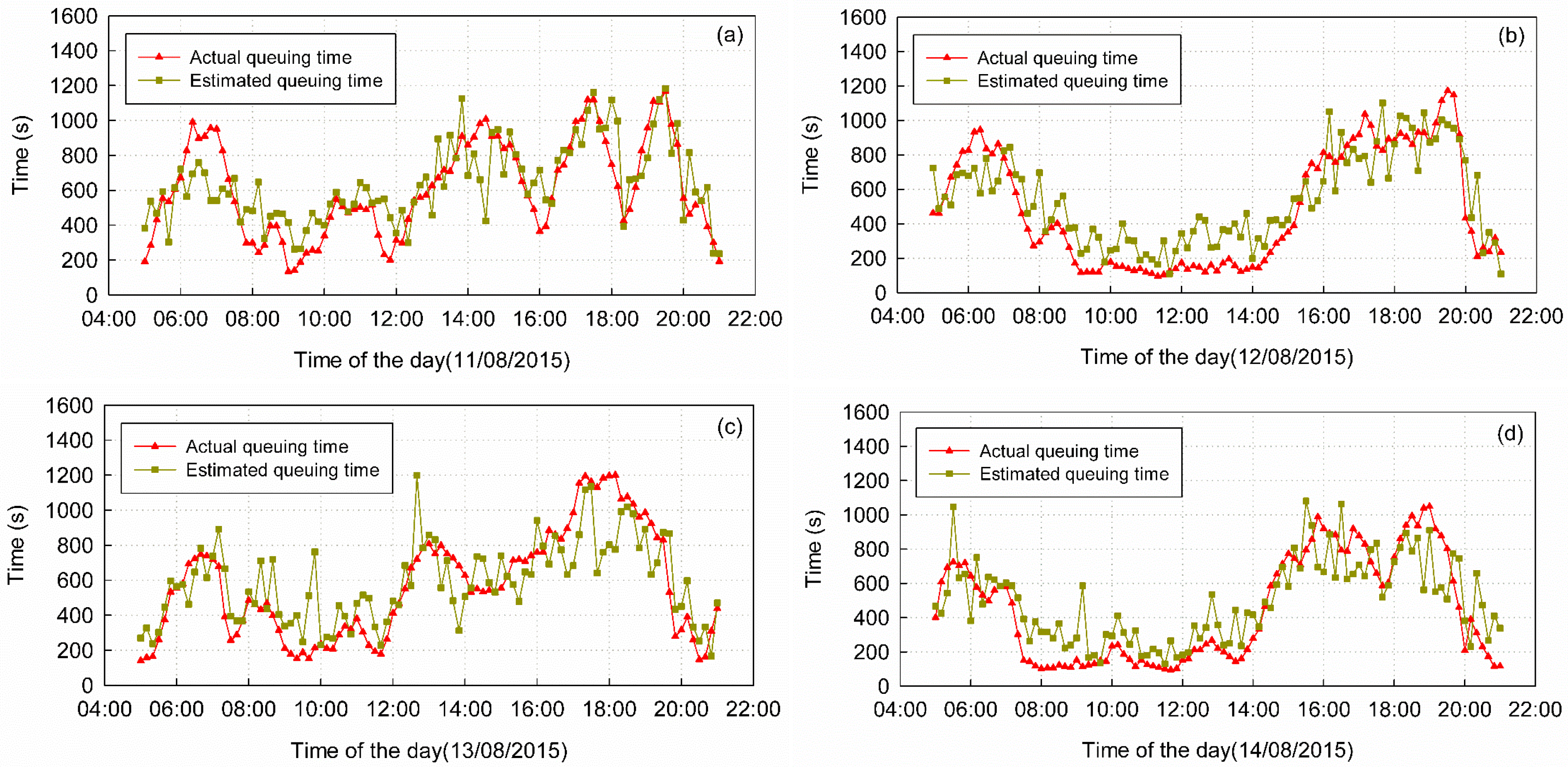
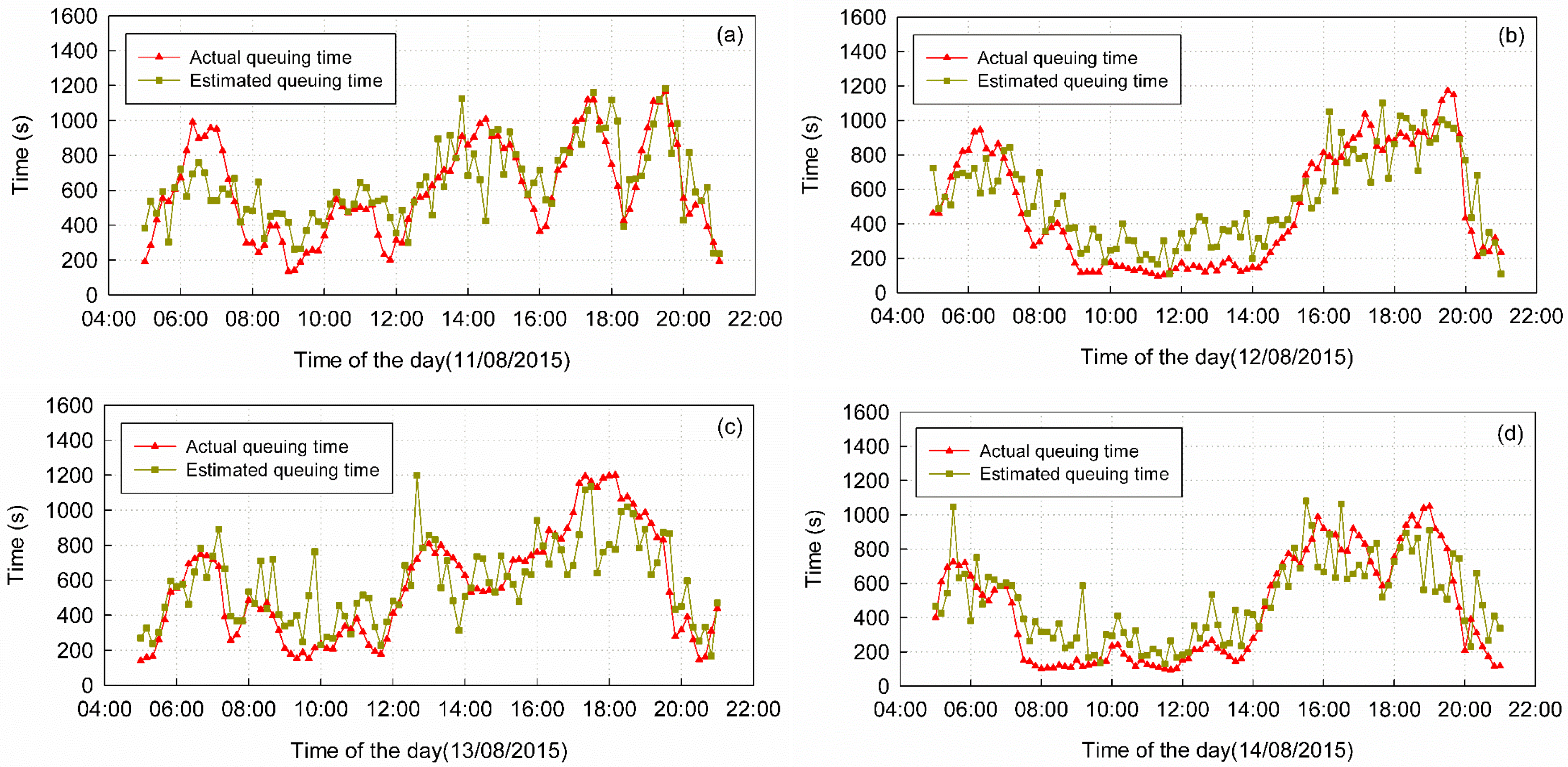
4.1.4. Estimation Results and Validation
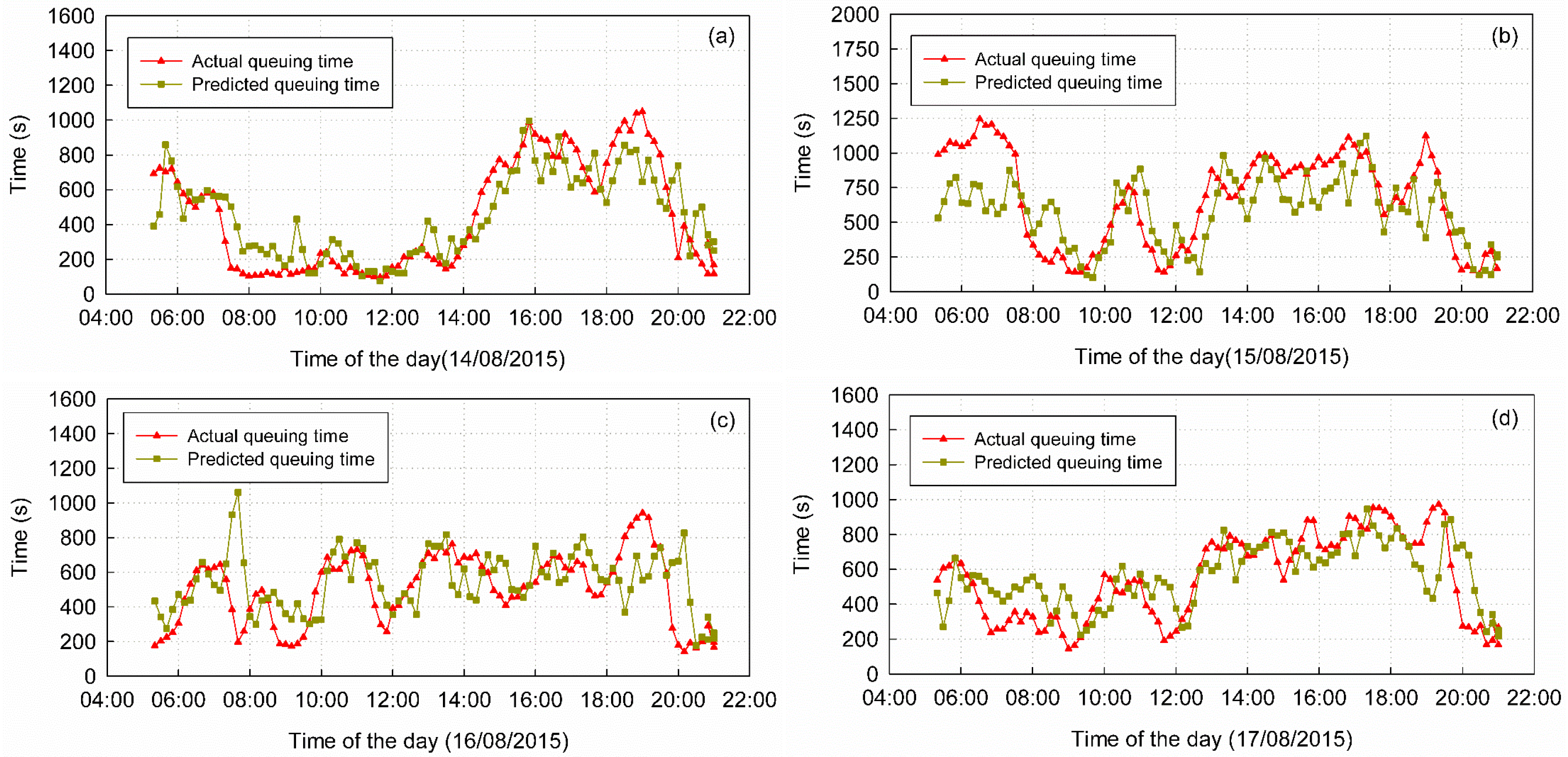
4.2. Queuing Time Prediction for the T3-C Entrance
5. Discussion
5.1. Topological Accuracy
5.1.1. Deployment of APs
5.1.2. Positioning Method
5.1.3. Hardware Status
5.2. Packet Delivery Frequency of Mobile Devices
5.3. Lags in the Models
6. Conclusions and Future Work
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Li, Q.; Han, Q.; Cheng, X.; Sun, L. Queuesense: Collaborative recognition of queuing on mobile phones. IEEE. Trans. Mob. Comput. 2016, 15, 60–73. [Google Scholar] [CrossRef]
- Houston, M.B.; Bettencourt, L.A.; Wenger, S. The relationship between waiting in a service queue and evaluations of service quality: A field theory perspective. Psychol. Mark. 1998, 15, 735–753. [Google Scholar] [CrossRef]
- Maister, D.H. The Psychology of Waiting Lines; Lexington Books: Lexington, MA, USA, 1984. [Google Scholar]
- Chan, A.B.; Liang, Z.-S.J.; Vasconcelos, N. Privacy preserving crowd monitoring: Counting people without people models or tracking. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Anchorage, AK, USA, 23–28 June 2008; pp. 1–7.
- Kilambi, P.; Ribnick, E.; Joshi, A.J.; Masoud, O.; Papanikolopoulos, N. Estimating pedestrian counts in groups. Comput. Vis. Image Underst. 2008, 110, 43–59. [Google Scholar] [CrossRef]
- Kong, D.; Gray, D.; Tao, H. Counting Pedestrians in Crowds Using Viewpoint Invariant Training. In Proceedings of the British Machine Conference, Oxford, UK, 5–8 September 2005.
- Parameswaran, V.; Shet, V.; Ramesh, V. Design and validation of a system for people queue statistics estimation. In Video Analytics for Business Intelligence; Springer: Berlin/Heidelberg, Germany, 2012; pp. 355–373. [Google Scholar]
- Shen, B.; Zheng, Q.; Li, X.; Xu, L. A framework for mining actionable navigation patterns from in-store RFID datasets via indoor mapping. Sensors 2015, 15, 5344–5375. [Google Scholar] [CrossRef] [PubMed]
- Budic, D.; Martinovic, Z.; Simunic, D. Cash register lines optimization system using rfid technology. In Proceedings of the 37th International Convention on Information and Communication Technology, Electronics and Microelectronics, Opatija, Croatia, 26–30 May 2014; pp. 459–462.
- Zhuang, Y.; Yang, J.; Li, Y.; Qi, L.; El-Sheimy, N. Smartphone-based indoor localization with bluetooth low energy beacons. Sensors 2016, 16. [Google Scholar] [CrossRef] [PubMed]
- Nishide, R.; Yamamoto, S.; Takada, H. Position estimation for people waiting in line using bluetooth communication. In Proceedings of the 5th International Conference on Mobile Services, Resources, and Users, Brussels, Belgium, 21–26 June 2015.
- Bullock, D.; Haseman, R.; Wasson, J.; Spitler, R. Automated measurement of wait times at airport security: Deployment at indianapolis international airport, indiana. Transp. Res. Rec. 2010, 2117, 60–68. [Google Scholar] [CrossRef]
- Brezmes, T.; Gorricho, J.-L.; Cotrina, J. Activity recognition from accelerometer data on a mobile phone. In Distributed Computing, Artificial Intelligence, Bioinformatics, Soft Computing, and Ambient Assisted Living; Springer: Berlin/Heidelberg, Germany, 2009; pp. 796–799. [Google Scholar]
- Wang, Y.; Wang, J.; Zhang, X. Qtime: A queuing-time notification system based on participatory sensing data. In Proceedings of the IEEE 37th Computer Software and Applications Conference, Kyoto, Japan, 22–26 July 2013; pp. 770–777.
- Bulut, M.F.; Demirbas, M.; Ferhatosmanoglu, H. Lineking: Coffee shop wait-time monitoring using smartphones. IEEE. Trans. Mob. Comput. 2015, 14, 2045–2058. [Google Scholar] [CrossRef]
- Biswas, J.; Veloso, M.M. Wifi localization and navigation for autonomous indoor mobile robots. In Proceedings of the IEEE International Conference on Robotics & Automation, Anchorage, AK, USA, 3–8 May 2010; pp. 4379–4384.
- Evennou, F.; Marx, F. Advanced integration of wifi and inertial navigation systems for indoor mobile positioning. Eurasip J. Appl. Signal Process. 2006, 2006, 086706. [Google Scholar] [CrossRef]
- Haddadi, H.; Hui, P.; Brown, I. Mobiad: Private and scalable mobile advertising. In Proceedings of the Fifth ACM International Workshop on Mobility in the Evolving Internet Architecture, Chicago, IL, USA, 20–24 September 2010; pp. 33–38.
- Yoon, C.; Lee, H.; Jeon, S.; Lee, H. Mobile digital signage system based on service delivery platform location based targeted advertisement service. ICT Converg. (ICTC) 2011, 582–586. [Google Scholar] [CrossRef]
- Chen, Z. Mining individual behavior pattern based on significant locations and spatial trajectories. In Proceedings of the 2012 IEEE International Conference on Pervasive Computing and Communications Workshops (PERCOM Workshops), Lugano, Switzerland, 19–23 March 2012; pp. 540–541.
- Manweiler, J.; Santhapuri, N.; Choudhury, R.R.; Nelakuditi, S. Predicting length of stay at wifi hotspots. In Proceedings of the 32nd IEEE INFOCOM Conference, Turin, Italy, 14–19 April 2013; pp. 3102–3110.
- Bulut, M.F.; Yilmaz, Y.S.; Demirbas, M.; Ferhatosmanoglu, N.; Ferhatosmanoglu, H. Lineking: Crowdsourced line wait-time estimation using smartphones. In Mobile Computing, Applications, and Services; Springer: Berlin/Heidelberg, Germany, 2012; pp. 205–224. [Google Scholar]
- Wang, Y.; Chen, Y.; Yang, J.; Liul, H.; Gruteser, M.; Martin, R.P. A low-cost Wi-Fi-based solution for measuring human queues. GetMob. Mob. Comput. Commun. 2015, 19, 10–13. [Google Scholar]
- Wang, Y.; Yang, J.; Chen, Y.; Liu, H.; Gruteser, M.; Martin, R.P. Tracking human queues using single-point signal monitoring. In Proceedings of the 12th Annual International Conference on Mobile Systems, Applications, and Services, Bretton Woods, NH, USA, 16–19 June 2014; pp. 42–54.
- Wang, Y.; Yang, J.; Liu, H.; Chen, Y.; Gruteser, M.; Martin, R.P. Measuring human queues using wifi signals. In Proceedings of the 19th Annual International Conference on Mobile Computing & Networking, Miami, FL, USA, 30 September–4 October 2013; pp. 235–238.
- Gardner, E.S. Exponential smoothing: The state of the art. J. Forecast. 1985, 4, 1–28. [Google Scholar] [CrossRef]
- Hyndman, R.J.; Koehler, A.B.; Snyder, R.D.; Grose, S. A state space framework for automatic forecasting using exponential smoothing methods. Int. J. Forecast. 2002, 18, 439–454. [Google Scholar] [CrossRef]
- Holt, C.C. Forecasting seasonals and trends by exponentially weighted moving averages. Int. J. Forecast. 2004, 20, 5–10. [Google Scholar] [CrossRef]
- Winters, P.R. Forecasting sales by exponentially weighted moving averages. Manag. Sci. 1960, 6, 324–342. [Google Scholar] [CrossRef]
- Cleveland, R.B.; Cleveland, W.S.; McRae, J.E.; Terpenning, I. STL: A seasonal-trend decomposition procedure based on loess. J. Off. Stat. 1990, 6, 3–73. [Google Scholar]
- Theodosiou, M. Forecasting monthly and quarterly time series using STL decomposition. Int. J. Forecast. 2011, 27, 1178–1195. [Google Scholar] [CrossRef]
- Davis, R.; Rogers, T.; Huang, Y. A Survey of Recent Developments in Queue Wait Time Forecasting Methods. In Proceedings of the International Conference on Foundations of Computer Science (FCS), Millersville, PA, USA, 25–28 July 2016.
- Cooper, R.B. Introduction to Queueing Theory; North Holland: New York, NY, USA, 1981. [Google Scholar]
- Gross, D. Fundamentals of Queueing Theory; John Wiley & Sons: Hoboken, NJ, USA, 2008. [Google Scholar]
- Gerlough, D.L.; Huber, M.J. Traffic Flow Theory; National Research Council: Washington, DC, USA, 1975; pp. 7–70. [Google Scholar]
- Kerner, B.S. Introduction to Modern Traffic Flow Theory and Control: The Long Road to Three-Phase Traffic Theory; Springer: Berlin/Heidelberg, Germany, 2009. [Google Scholar]
- Woo, S.; Jeong, S.; Mok, E.; Xia, L.; Choi, C.; Pyeon, M.; Heo, J. Application of wifi-based indoor positioning system for labor tracking at construction sites: A case study in guangzhou MTR. Autom. Constr. 2011, 20, 3–13. [Google Scholar] [CrossRef]
- O’hara, B.; Petrick, A. IEEE 802.11 Handbook: A Designer’s Companion; IEEE Standards Association: Piscataway, NJ, USA, 2005. [Google Scholar]
- Cheng, Y.-C.; Chawathe, Y.; LaMarca, A.; Krumm, J. Accuracy characterization for metropolitan-scale wi-fi localization. In Proceedings of the 3rd International Conference on Mobile Systems, Applications, and Services, Seattle, WA, USA, 6–8 June 2005; pp. 233–245.
- Hightower, J.; Borriello, G. Location systems for ubiquitous computing. Computer 2001, 34, 57–66. [Google Scholar] [CrossRef]
- Motley, A.; Keenan, J. Personal communication radio coverage in buildings at 900 MHz and 1700 MHz. Electron. Lett. 1988, 24, 763–764. [Google Scholar] [CrossRef]
- Liu, H.; Darabi, H.; Banerjee, P.; Liu, J. Survey of wireless indoor positioning techniques and systems. IEEE Trans. Syst. Man Cybern. Part C Appl. Rev. 2007, 37, 1067–1080. [Google Scholar] [CrossRef]
- Park, D.; Park, J.G. An Enhanced Ranging Scheme Using WiFi RSSI Measurements for Ubiquitous Location. In Proceedings of the 2011 First ACIS/JNU International Conference on Computers, Networks, Systems and Industrial Engineering (CNSI), Jeju, Korea, 23–25 May 2011; pp. 296–301.
- Box, G.E.; Jenkins, G.M.; Reinsel, G.C.; Ljung, G.M. Time Series Analysis: Forecasting and Control; John Wiley & Sons: Hoboken, NJ, USA, 2015. [Google Scholar]
- Le Dortz, N.; Gain, F.; Zetterberg, P. WiFi fingerprint indoor positioning system using probability distribution comparison. In Proceedings of the 2012 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Kyoto, Japan, 25–30 March 2012; pp. 1–12.
- Hernández, N.; Alonso, J.M.; Ocana, M.; Marina, M.K. Impact of Signal Representations on the Performance of Hierarchical WiFi Localization Systems. In Proceedings of the 14th International Conference on Computer Aided Systems Theory (EUROCAST), Las Palmas, Spain, 6–15 February 2013.
- Hernández, N.; Alonso, J.M.; Ocaña, M. Hierarchical approach to enhancing topology-based wifi indoor localization in large environments. J. Mult.-Valued Log. Soft Comput. 2016, 26, 221–241. [Google Scholar]
- Forecast: Forecasting Functions for Time Series and Linear Models. Available online: https://cran.r-project.org/web/packages/forecast/index.html (accessed on 27 September 2016).
- Team, R.C. R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2013. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Inside | Outside | |
|---|---|---|
| Inside | 73.11% | 26.89% |
| Outside | 17.21% | 82.79% |
| Parameter Combinations | Error Statistics | |||||||
|---|---|---|---|---|---|---|---|---|
| Mean | Std. | MAE | AE ≤ 60 s | AE ≤ 120 s | AE ≤ 180 s | AE ≤ 200 s | ||
| 5 | 50% | 30.27 | 177.30 | 144.57 | 32.99% | 49.48% | 71.13% | 76.29% |
| 6 | 50% | 38.46 | 189.37 | 146.60 | 30.93% | 50.52% | 69.07% | 73.20% |
| 7 | 50% | 49.39 | 193.98 | 151.24 | 27.84% | 50.52% | 69.07% | 72.16% |
| 8 | 50% | 52.08 | 193.59 | 151.72 | 26.80% | 52.58% | 69.07% | 73.20% |
| 9 | 50% | 61.11 | 195.71 | 157.38 | 25.77% | 52.58% | 65.98% | 71.13% |
| 10 | 50% | 63.47 | 193.69 | 162.19 | 22.68% | 47.42% | 62.89% | 69.07% |
| 5 | 40% | 30.10 | 196.18 | 148.54 | 34.02% | 52.58% | 67.01% | 72.16% |
| 5 | 30% | 24.36 | 207.67 | 158.72 | 29.90% | 49.48% | 65.98% | 70.10% |
| 5 | 20% | 15.21 | 210.29 | 160.19 | 27.84% | 52.58% | 67.01% | 69.07% |
| 5 | 10% | −2.76 | 216.68 | 167.48 | 24.74% | 48.45% | 65.98% | 69.07% |
| 5 | 0% | −49.45 | 228.15 | 183.47 | 21.65% | 42.27% | 59.79% | 61.86% |
| 6 | 40% | 35.54 | 195.21 | 150.07 | 29.90% | 49.48% | 67.01% | 72.16% |
| 6 | 30% | 31.21 | 207.15 | 160.91 | 26.80% | 47.42% | 64.95% | 70.10% |
| 6 | 20% | 20.18 | 209.47 | 161.04 | 26.80% | 50.52% | 67.01% | 70.10% |
| 6 | 10% | 1.17 | 215.61 | 166.61 | 24.74% | 49.48% | 65.98% | 69.07% |
| 6 | 0% | −40.43 | 230.45 | 183.76 | 21.65% | 41.24% | 58.76% | 60.82% |
| 7 | 40% | 47.71 | 200.10 | 155.34 | 27.84% | 49.48% | 65.98% | 69.07% |
| 7 | 30% | 42.49 | 212.83 | 165.82 | 25.77% | 46.39% | 63.92% | 68.04% |
| 7 | 20% | 38.49 | 215.77 | 167.98 | 27.84% | 46.39% | 64.95% | 67.01% |
| 7 | 10% | 21.25 | 229.22 | 174.12 | 25.77% | 47.42% | 63.92% | 68.04% |
| 7 | 0% | −21.29 | 250.22 | 194.09 | 23.71% | 41.23% | 56.70% | 61.86% |
| 8 | 40% | 51.51 | 201.10 | 156.96 | 26.80% | 50.52% | 67.01% | 69.07% |
| 8 | 30% | 46.30 | 214.06 | 167.07 | 25.77% | 47.42% | 64.95% | 67.01% |
| 8 | 20% | 42.15 | 218.55 | 172.81 | 24.74% | 46.39% | 62.89% | 65.98% |
| 8 | 10% | 23.67 | 230.53 | 175.55 | 27.84% | 45.36% | 62.89% | 68.04% |
| 8 | 0% | −18.15 | 251.78 | 195.19 | 23.71% | 39.18% | 56.705 | 61.86% |
| Date | Mean | Std. | MAE | AE ≤ 60 s | AE ≤ 120 s | AE ≤ 180 s | AE ≤ 200 s |
|---|---|---|---|---|---|---|---|
| 11 August | 30.27 | 177.30 | 137.14 | 32.99% | 49.48% | 71.13% | 76.29% |
| 12 August | 54.80 | 167.90 | 147.97 | 19.59% | 45.36% | 64.95% | 71.13% |
| 13 August | 16.52 | 189.23 | 143.07 | 28.87% | 51.55% | 69.07% | 74.23% |
| 14 August | 44.25 | 175.83 | 147.38 | 23.71% | 45.36% | 67.01% | 70.10% |
| 15 August | −66.91 | 247.02 | 197.20 | 21.65% | 37.11% | 58.76% | 61.86% |
| 16 August | 40.12 | 186.46 | 142.63 | 24.74% | 57.73% | 77.32% | 78.35% |
| 17 August | 16.53 | 163.20 | 133.65 | 23.71% | 49.48% | 72.16% | 77.32% |
| 18 August | 58.41 | 143.63 | 123.12 | 27.84% | 60.82% | 73.20% | 79.38% |
| Error Statistics of Prediction Results from Model | Error Statistics of Prediction Results from Model | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| No. | Mean | Std. | MAE | AE ≤ 200 s | No. | Mean | Std. | MAE | AE ≤ 200 s |
| 01 | 46.55 | 195.15 | 177.05 | 60.00% | 02 | 34.24 | 178.60 | 155.15 | 66.32% |
| 03 | −38.89 | 216.97 | 164.80 | 69.47% | 04 | −35.40 | 203.05 | 161.41 | 69.47% |
| 05 | 41.51 | 190.07 | 160.52 | 69.47% | 06 | 27.38 | 163.27 | 132.29 | 77.89% |
| Models | Prediction Error Statistics | |||
|---|---|---|---|---|
| Mean | Std. | MAE | AE ≤ 200 s | |
| Models trained by estimation results of previous 1 day | 13.19 | 219.23 | 168.50 | 69.47% |
| Models trained by estimation results of previous 2 days | −10.53 | 214.29 | 161.36 | 70.52% |
| Models trained by estimation results of previous 3 days | −14.41 | 213.72 | 160.47 | 70.88% |
| Model | Mean | Std. | MAE | AE ≤ 60 s | AE ≤ 120 s | AE ≤ 180 s | AE ≤ 200 s |
|---|---|---|---|---|---|---|---|
| 5.21 | 188.33 | 148.95 | 28.21% | 50.53% | 68.42% | 73.05% | |
| Holt-Winters | 19.06 | 206.89 | 162.42 | 23.71% | 44.74% | 64.54% | 67.84% |
| STL-ARIMA | 18.15 | 188.47 | 152.90 | 24.33% | 45.98% | 64.12% | 69.28% |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shu, H.; Song, C.; Pei, T.; Xu, L.; Ou, Y.; Zhang, L.; Li, T. Queuing Time Prediction Using WiFi Positioning Data in an Indoor Scenario. Sensors 2016, 16, 1958. https://doi.org/10.3390/s16111958
Shu H, Song C, Pei T, Xu L, Ou Y, Zhang L, Li T. Queuing Time Prediction Using WiFi Positioning Data in an Indoor Scenario. Sensors. 2016; 16(11):1958. https://doi.org/10.3390/s16111958
Chicago/Turabian StyleShu, Hua, Ci Song, Tao Pei, Lianming Xu, Yang Ou, Libin Zhang, and Tao Li. 2016. "Queuing Time Prediction Using WiFi Positioning Data in an Indoor Scenario" Sensors 16, no. 11: 1958. https://doi.org/10.3390/s16111958
APA StyleShu, H., Song, C., Pei, T., Xu, L., Ou, Y., Zhang, L., & Li, T. (2016). Queuing Time Prediction Using WiFi Positioning Data in an Indoor Scenario. Sensors, 16(11), 1958. https://doi.org/10.3390/s16111958