
Piezoelectric Sensor to Measure Soft and Hard Stiffness with High Sensitivity for Ultrasonic Transducers

Abstract
:1. Introduction
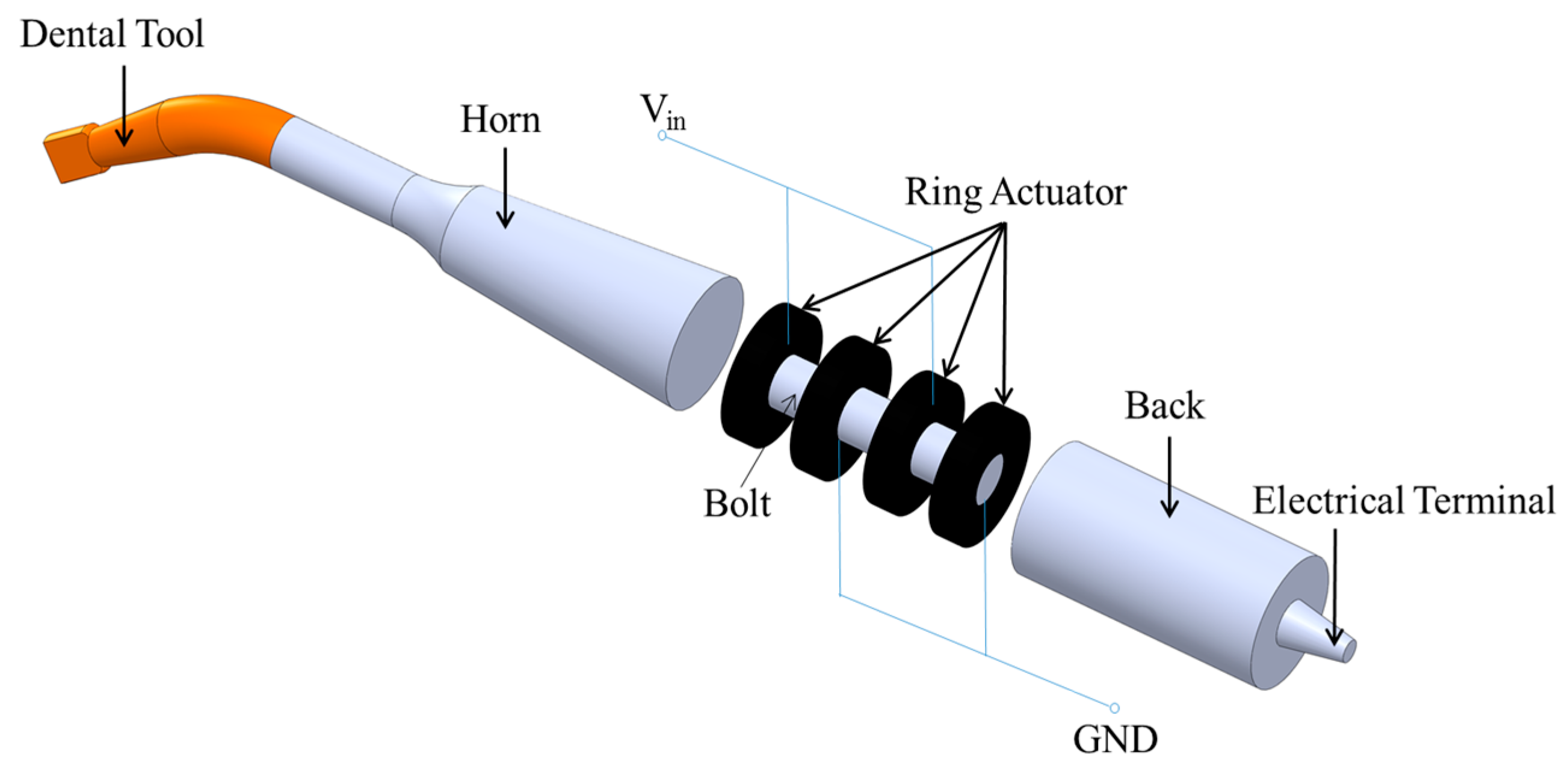
2. Design of PZT Sensor
2.1. Design Construction


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| PZT Charge Constant | PZT Voltage Constant | Dielectric Constant | Electromechanical Coupling Factor | Mechanical Quality Factor |
|---|---|---|---|---|
| d33 (pC/N) | g33 (×10−3 vm/N) | ε33/ε0 | Kp (×10−2) | QM |
| 310 | 23.4 | 1470 | 58 | 2500 |
2.2. Design of Sensor Types
| Type | Parameter | Young’s Modulus | PZT Voltage Constant | Density | Thickness | Mechanical Quality Factor | Design |
|---|---|---|---|---|---|---|---|
| Y33 (GPa) | g33 (×10−3 vm/N) | ρ (×10−3 kg/m3) | t (mm) | QM | |||
| T1 | PZT-1 | 66 | 23.4 | 7.80 | 1.0 | 2500 | Ring sensor |
| T2 | PVDF | 1–3 | 150.0 | 1.77 | 0.1 | 11 | Ring sensor |
| T3 | PZT-2 | 60 | 25.6 | 7.70 | 1.0 | 2000 | Ring sensor |
| T4 | PZT-1 | 66 | 23.4 | 7.80 | 1.0 | 2500 | Split into sensor (12.5% area) and actuator (87.5% area) |
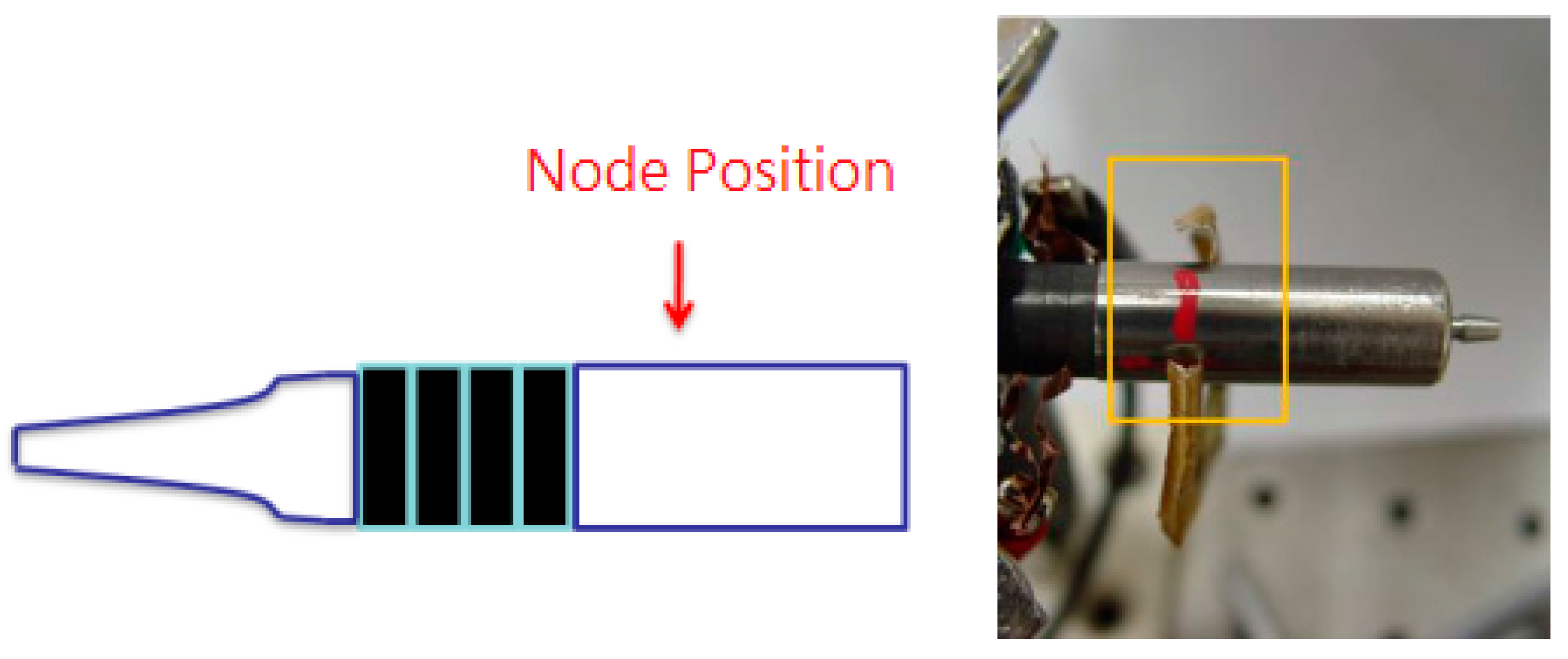
2.3. Design of Sensor Locations
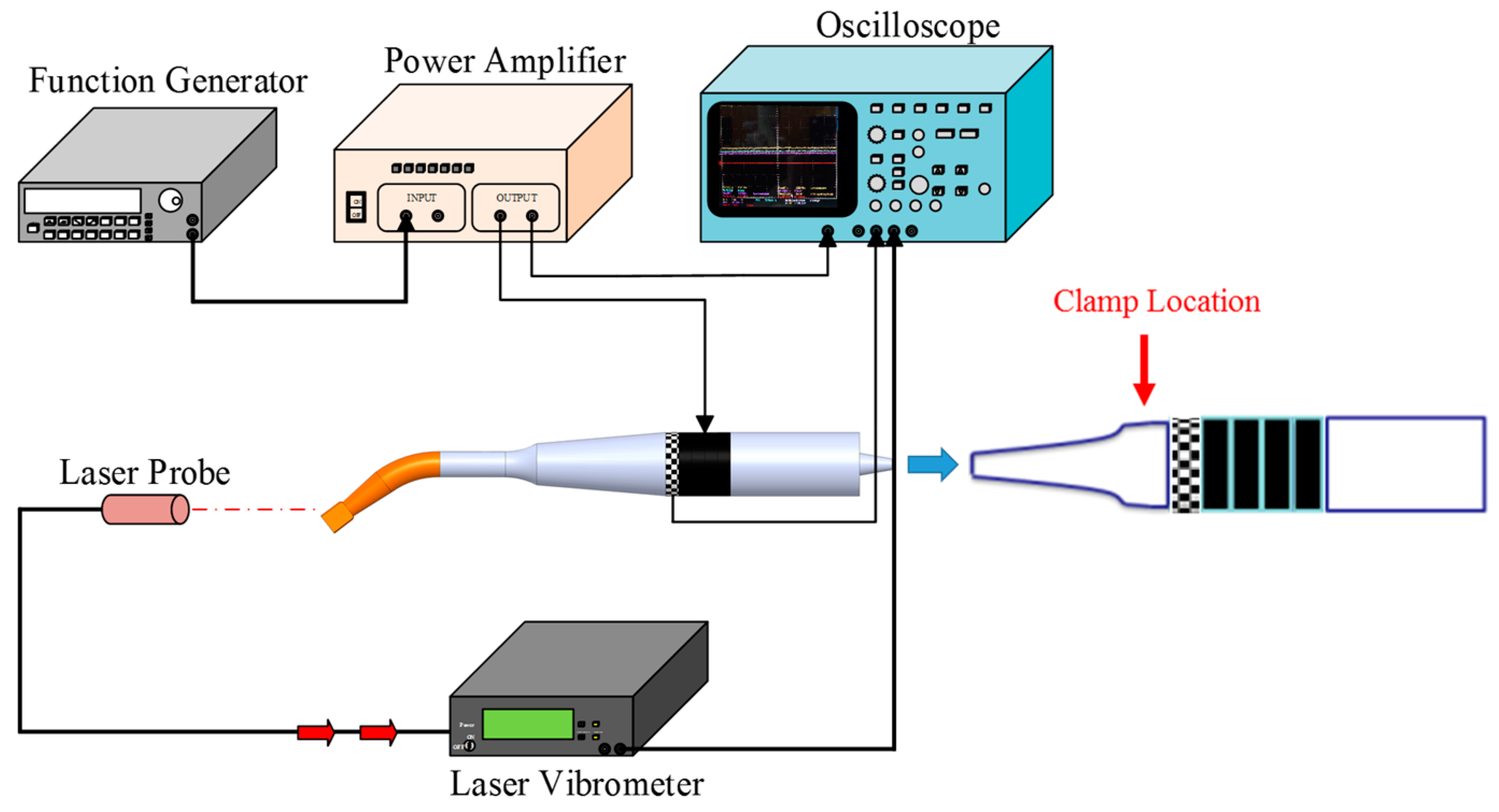
3. Experimental Measurement
3.1. Sensor Performance from Free Vibration

3.2. Sensor Performance in Contact with Test Sample
| Material | Young’s Modulus (MPa) | Poission’s Ratio | Density (×10−3 kg/m3) |
|---|---|---|---|
| Cancellous Bone | 345 | 0.31 | 1.0 |
| PMMA | 303 | 0.32 | 1.15–1.19 |

4. Results and Discussion
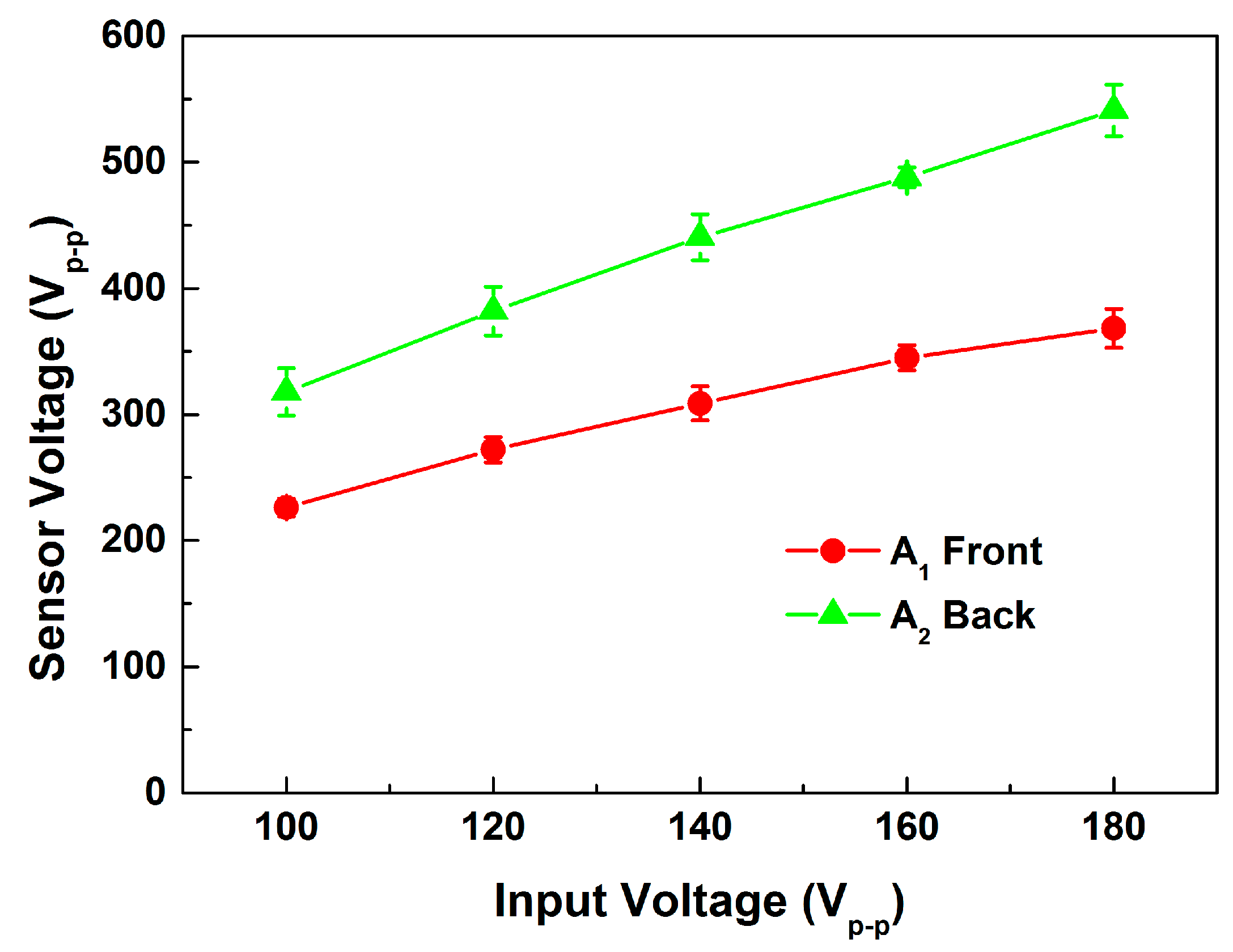
4.1. Sensor Performance in Free Vibration

4.2. Sensor Performance in Contact Test Sample

5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- González-García, A.; Diniz-Freitas, M.; Somoza-Martín, M. Ultrasonic osteotomy in oral surgery and implantology. Oral Surg. Oral Med. Oral Pathol. Oral Radiol. Endodontol. 2009, 108, 360–367. [Google Scholar] [CrossRef] [PubMed]
- Mathieu, V.; Vayron, R.; Barthel, E.; Dalmas, D.; Soffer, E; Anagnostou, F.; Haïat, G. Mode III cleavage of a coin-shaped titanium implant in bone: Effect of friction and crack propagation. J. Mech. Behav. Biomed. Mater. 2012, 8, 194–203. [Google Scholar] [CrossRef] [PubMed]
- Vayron, R.; Soffer, E.; Anagnostou, F.; Haïat, G. Ultrasonic evaluation of dental implant osseointegration. J. Biomech. 2014, 47, 3562–3568. [Google Scholar] [CrossRef] [PubMed]
- Geminiani, A.; Papadimitriou, D.E.; Ercoli, C. Maxillary sinus augmentation with a sonic handpiece for the osteotomy of the lateral window: A clinical report. J. Prosthet. Dent. 2011, 106, 279–283. [Google Scholar] [CrossRef]
- Thomas, J. Piezoelectric ultrasonic bone surgery benefits for the interdisciplinary team and patients. Funct. Esthet. Restor. 2008, 2, 20–24. [Google Scholar]
- Toda, S.; Fujita, T.; Arakawa, H.; Toda, K. An ultrasonic nondestructive technique for evaluation layer thickness in human teeth. Sens. Actuators A Phys. 2005, 125, 1–9. [Google Scholar] [CrossRef]
- Harput, S.; Evans, T.; Bubb, N.; Freear, S. Diagnostic ultrasound tooth imaging using fractional Fourier Transform. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2011, 58, 2096–2106. [Google Scholar] [CrossRef] [PubMed]
- Kim, D.S.; Lee, W.J.; Choi, S.C.; Lee, S.S.; Heo, M.S.; Huh, K.H.; Kim, T.I.; Lee, I.B.; Han, J.H.; Yi, W.J.; et al. A new method for the evaluation of dental implant stability using an inductive sensor. Mech. Eng. Phys. 2012, 34, 1247–1252. [Google Scholar] [CrossRef] [PubMed]
- Chu, P.W.P.; Li, H.L.; Chan, H.L.W.; Ng, K.M.W.; Liu, P.C.K. Smart ultrasonic transducer for wire-bonding applications. Mater. Chem. Phys. 2002, 75, 95–100. [Google Scholar] [CrossRef]
- Or, S.W.; Chan, H.L.W.; Lo, V.C.; Yuen, C.W. Ultrasonic wire-bond quality monitoring using piezoelectric sensor. Sens. Actuators A Phys. 1998, 65, 69–75. [Google Scholar] [CrossRef]
- Feng, W.; Meng, Q.; Xie, Y.; Fan, H. Wire bonding quality monitoring via refining process of electrical signal from ultrasonic generator. Mech. Syst. Signal Process. 2011, 25, 884–900. [Google Scholar] [CrossRef]
- Maruyama, Y.; Takasaki, M.; Kutami, T.; Mizuno, T. Application of ultrasonic dental scaler for diagnosis. In Proceedings of the 2007 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Zurich, Switzerland, 4–7 September 2007; pp. 1–6.
- Beheshti-Aval, S.B.; Lezgy-Nazargah, M.; Vidal, P.; Polit, O. A refined sinus finite element model for the analysis of piezoelectric-laminated beams. J. Intell. Mater. Syst. Struct. 2011, 22, 203–219. [Google Scholar] [CrossRef]
- Helgason, B.; Perilli, E.; Schileo, E.; Taddei, F.; Brynjo’lfsson, S.; Viceconti, M. Mathematical relationships between bone density and mechanical properties: A literature review. Clin. Biomech. 2008, 23, 135–146. [Google Scholar] [CrossRef] [PubMed]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.-R.; Su, C.-C.; Lin, W.-J.; Chang, S.-H. Piezoelectric Sensor to Measure Soft and Hard Stiffness with High Sensitivity for Ultrasonic Transducers. Sensors 2015, 15, 13670-13679. https://doi.org/10.3390/s150613670
Li Y-R, Su C-C, Lin W-J, Chang S-H. Piezoelectric Sensor to Measure Soft and Hard Stiffness with High Sensitivity for Ultrasonic Transducers. Sensors. 2015; 15(6):13670-13679. https://doi.org/10.3390/s150613670
Chicago/Turabian StyleLi, Yan-Rui, Chih-Chung Su, Wen-Jin Lin, and Shuo-Hung Chang. 2015. "Piezoelectric Sensor to Measure Soft and Hard Stiffness with High Sensitivity for Ultrasonic Transducers" Sensors 15, no. 6: 13670-13679. https://doi.org/10.3390/s150613670