2-D Unitary ESPRIT-Like Direction-of-Arrival (DOA) Estimation for Coherent Signals with a Uniform Rectangular Array

Abstract
: A unitary transformation-based algorithm is proposed for two-dimensional (2-D) direction-of-arrival (DOA) estimation of coherent signals. The problem is solved by reorganizing the covariance matrix into a block Hankel one for decorrelation first and then reconstructing a new matrix to facilitate the unitary transformation. By multiplying unitary matrices, eigenvalue decomposition and singular value decomposition are both transformed into real-valued, so that the computational complexity can be reduced significantly. In addition, a fast and computationally attractive realization of the 2-D unitary transformation is given by making a Kronecker product of the 1-D matrices. Compared with the existing 2-D algorithms, our scheme is more efficient in computation and less restrictive on the array geometry. The processing of the received data matrix before unitary transformation combines the estimation of signal parameters via rotational invariance techniques (ESPRIT)-Like method and the forward-backward averaging, which can decorrelate the impinging signals more thoroughly. Simulation results and computational order analysis are presented to verify the validity and effectiveness of the proposed algorithm.1. Introduction
Two-dimensional (2-D) direction-of-arrival (DOA) estimation of coherent signals has received much attention in many applications, such as radar, wireless communication and sonar in the multipath environment [1–5]. There are several high resolution techniques proposed to solve the rank deficiency of spatial covariance matrix caused by the presence of coherent signals. The conventional solution to this problem is the spatial smoothing method [6,7], which partitions the original array into a series of overlapping subarrays. Although it is efficient to decorrelate the incoming signals, peak searching of the spectrum in a 2-D space is required, which costs a large amount of computations. In order to reduce the computational complexity, an efficient method is performed by Hua [8]. This method, called the matrix enhancement and matrix pencil (MEMP) algorithm, exploits the structure inherent in an enhanced matrix from the original data. It estimates the azimuth and elevation separately in each dimension and combines them using a pairing method. However, the pairing result is not always correct when there are repeated parameters. Fortunately, a modified MEMP (MMEMP) method [9] is proposed to successfully solve the pairing problem.
In order to decorrelate the coherent signals thoroughly, recently, Han et al. [10] proposes an estimation of signal parameters via rotational invariance techniques (ESPRIT)-like algorithm for coherent DOA estimation. By reconstructing a Toeplitz matrix from the covariance matrix, this approach can decorrelate the impinging waves thoroughly. In [11], Chen extends it to the 2-D situation, namely the 2-D ESPRIT-like method, in conjunction with the MMEMP method, which outperforms the spatial smoothing method significantly in terms of the estimation accuracy. Although there is no peak searching existing in this algorithm, the computational burden is still heavy, due to the complex eigenvalue decomposition (EVD) and singular value decomposition (SVD) involved.
In this paper, we present a 2-D unitary ESPRIT-like (2-D UESPRIT-like) algorithm to reduce the computation complexity. Based on the block Hankel matrix obtained from [11], we preprocess it through a forward-backward average-like method convenient for unitary transformation. It can therefore transform the complex computations into real-valued ones and provide significant computational savings. The following DOA extractions are achieved simply by the one-dimensional (1-D) unitary ESPRIT [12], avoiding the computations of 2-D matrices. Simulation results will show that the real computations required for our new algorithm are much less than that of the 2-D ESPRIT-like method. It becomes especially obvious when the dimensionality of the Hankel matrix tends to be large. We also show that the variance of the estimates from our proposed method is close to the Cramer-Rao bound, and the resolution ability is superior to the others for the forward-backward average processing.
2. Background
2.1. Signal Model for URA
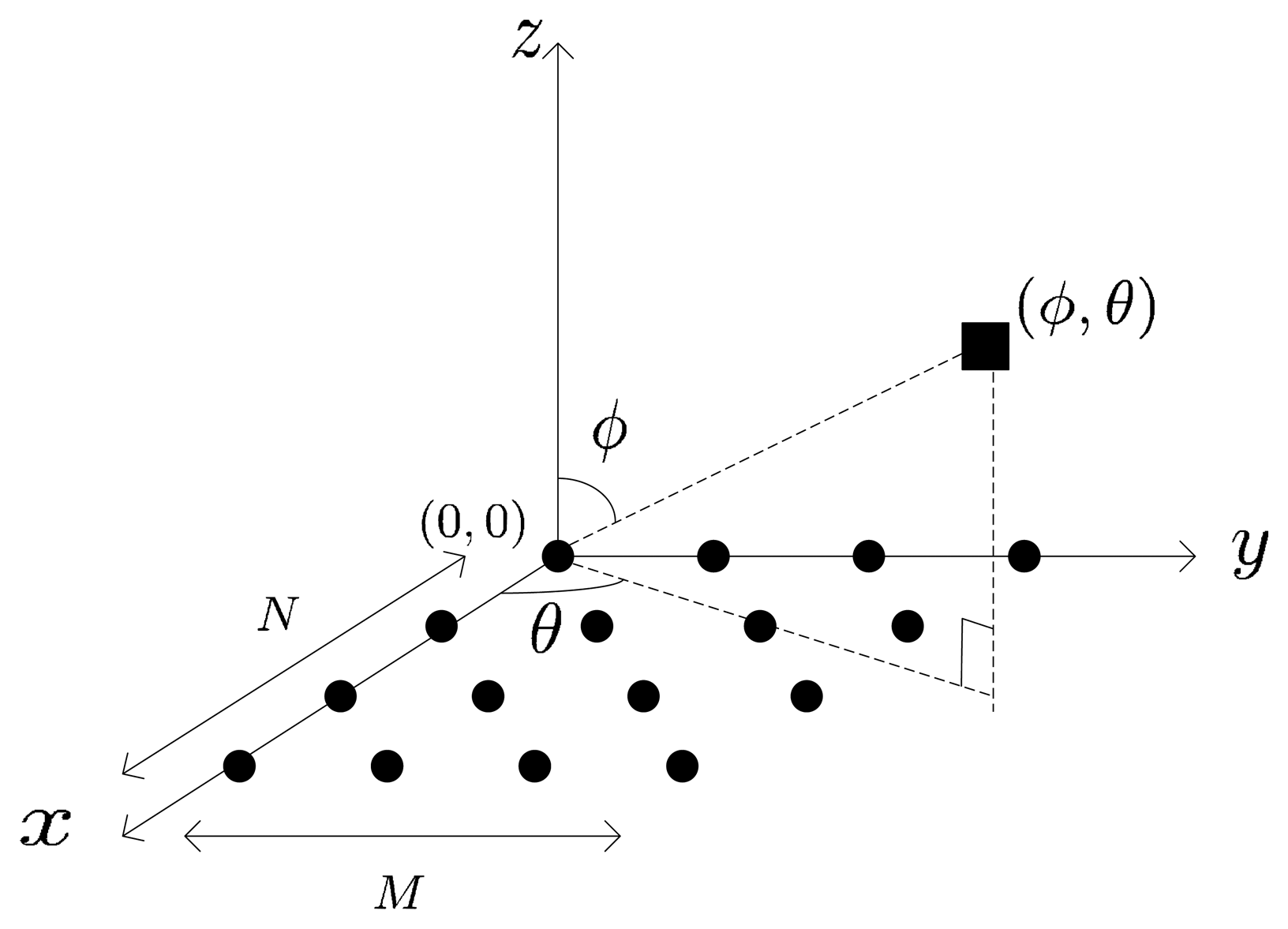
Consider K narrowband, far-field and coherent radiating sources with wavelength λ impinging on a URA of N × M identical and omnidirectional sensors with interelement spacing, dx = dy = λ/2. Using analytic signal representation, the received signal at the (n, m)th sensor can be expressed by: [7]
Therefore, (βk, γk) can be expressed as (ejuk,ejυk). Rewriting Equation (1) in vector notation, we get:
From Equation (3), it follows that the covariance matrix of the received signal is given by:
According to the derivation in [11], the element of Rx, for example, the cross correlation of the signals received at the (n,m)th and (p,q)th sensor for n,p = 0,…, N − 1 and m, q = 0,…, M − 1 is given by:
2.2. Real-Valued Processing for 1-D ULA
As the real-valued processing with a uniform linear array (ULA) provides the important preliminary knowledge to our new algorithm, we give a quick review of the definition of the unitary matrix and the real-valued processing based on it, which have been widely used in certain kinds of unitary transformation algorithms ([12,13]etc). Suppose there are only N sensors located on the x axis; left in Figure 1. N is odd, and the center of the ULA is the reference. The DOA of the incoming signal is denoted by (θ,ϕ = π/2). Then, the N × 1 steering vector of ULA can be written as:
3. Proposed Algorithm
3.1. Signal Decorrelation
The proposed method is developed in the 2-D scenario, which has been introduced in Section 2.1. In order to resolve the rank deficiency problem caused by signal coherency, we first construct the following Hankel matrix from Equation (5) [11]:
It should be noted that the following derivation will be performed under the assumption that there is no noise existing in the received data, which can be seen from Equation (11). Further study on the complex situation with spatially white noise will be carried out in Section 5 through several simulations.
3.2. Real- Valued Processing
Although we can apply the eigenstructure techniques to estimate 2-D DOA based on the full-rank R(n,m), the computational burden is much heavier, because of the complex computations involved in it. In this note, we develop a 2-D unitary transformation method to reduce the complex computations to real ones.
If we premultiply and postmultiply R(n, m) with unitary matrices directly, (n, m) cannot be transformed into real-valued, because the matrix D(n, m) is complex. Therefore, we need to construct a new matrix associated with R(n, m) before unitary transformation to guarantee this property. Let us define:
Substituting Equations (14) and (15) into Equation (13)RY can be rewritten as:
Since b̄(uk) and b̄(υk) in B′ have the similar form as Equation (6), we can make use of the 1-D real-valued processing-like Equation (8) to perform the 2-D unitary transformation. Define the 2-D unitary matrix as:
3.3. Extracting βk and γk
To avoid peak searching, to retain the 2-D DOA estimation real-valued and reduce the computational complexity, we develop a simple implement of the 2-D unitary ESPRIT based on the 1-D solution [12].
Let eigenvectors associated with the K largest eigenvalues of RY be denoted by EsRY ∈ CPQ×K. Since EsRY and B′ both span the signal subspace of RY, as Equation (16) has shown, there exists a unique, nonsingular matrix, T ∈ CK×K, such that EsRY = B′T. Define Es1 = J1EsRY and Es2 = J2EsRY as the first and last, (P − 1)Q, rows of matrix, EsRY, respectively, with J1 = [I(P−1)Q, 0(P−1)Q×Q] and J2 = [0(P−1)Q×Q, I(P−1)Q]. Then, replacing EsRY by B′T, we have:
Denote the right singular vector matrix of T1 by Wu and partition it into submatrices:
Employing the existing automatic pairing method [16,17], the estimates, υk and υk, can be achieved by computing the EVD of the “complexified” matrix ϒu + jϒυ. Denote the real and the imaginary parts of the K eigenvalues as and . The estimation of uk and υk will be:
3.4. Summary of the Algorithm
The steps of the proposed method are described as follows:
- Step 1.
Obtain X = [x(t1),…, x(tL)] with x(tk) as the snapshot at time, tk. Then, compute the covariance matrix approximately by Rx = XXH/L with L as the snapshot number.
- Step 2.
Construct the block Hankel matrix R(n, m) by Equation (10) to decorrelate the coherency of signals and obtain RY through Equations (12) and (13) to facilitate the following unitary transformation. Then, compute the real-valued matrix .
- Step 3.
Compute Esϕ as the K dominant eigenvectors of ϕ and calculate T1, T2 through Equations (25) and (29). Conduct the SVD of T1, T2 to obtain the right singular vector matrices, Wu, Wυ, and get ϒu, ϒυ from Equations (28) and (30), respectively.
- Step 4.
Conduct EVD of the complex-valued matrix, ϒu + jϒυ. Extract uk and υk from the eigenvalues by Equation (31). At last, estimate θk and ϕk using Equation (32).
4. Computational Order Analysis
In the following, we will first derive an estimate of the order of real multiplications involved in each step. Then, we will compare the computational order of our new method, namely the 2-D UESPRIT-like method, against that of the 2-D ESPRIT-like method.
4.1. Computational Order of Step 1
Here, we calculate Rx by XXH/L with X ∈ CMN×L. The direct computation requires real multiplications.
4.2. Computational Order of Step 2
From Equation (13), we can see that to obtain RY, only the computation of Ry = R(n, m)RH (n, m) is needed. It is because can be achieved by rearranging the elements of Ry simply, without any multiplication. According to the computational analysis in [8], the minimum number of real multiplications required to compute Ry is:
In this step, we also need to calculate ϕ. Due to the special structure of unitary matrices, UP and UQ, the computation of UP,Q = UP ⊗ UQ only contains that of the product of j and UQ. Therefore, the order of computing UP,Q is 2Q. For the same reason, the real multiplications involved in is:
4.3. Computational Order of Step 3
As φ is a real-valued matrix, the number of multiplications required (based on the symmetric QR algorithm [18]) for its EVD is:
The following real multiplications involved in the ϒu and ϒυ achievement is listed in Table 1. Denote the total number involved in it as C1. The computational order of SVD is obtained by the Chan SVD [18].
4.4. Computational Order of Step 4
In this step, only the EVD of complex-valued matrix, ϒu + jϒυ, is considered. It requires 4 × 5L3 real multiplications when L≫1.
4.5. Comparison to the 2-D ESPRIT-Like Method
According to the above analysis, the order of computations needed by the 2-D UESPRIT-like method is:
In contrast, we present the computations needed in the 2-D ESPRIT-like method [11], which uses the same decorrelation processing, but a different MMEMP method behind it. As stated in [8], the multiplications required in each step are listed in Table 2. C2 = 3PQL2 + 7L3, the number of complex multiplications used in MMEMP, is obtained under the assumption that there are no repeated βk. From Table 2, the real computations of the 2-D ESPRIT-like method can be written as:
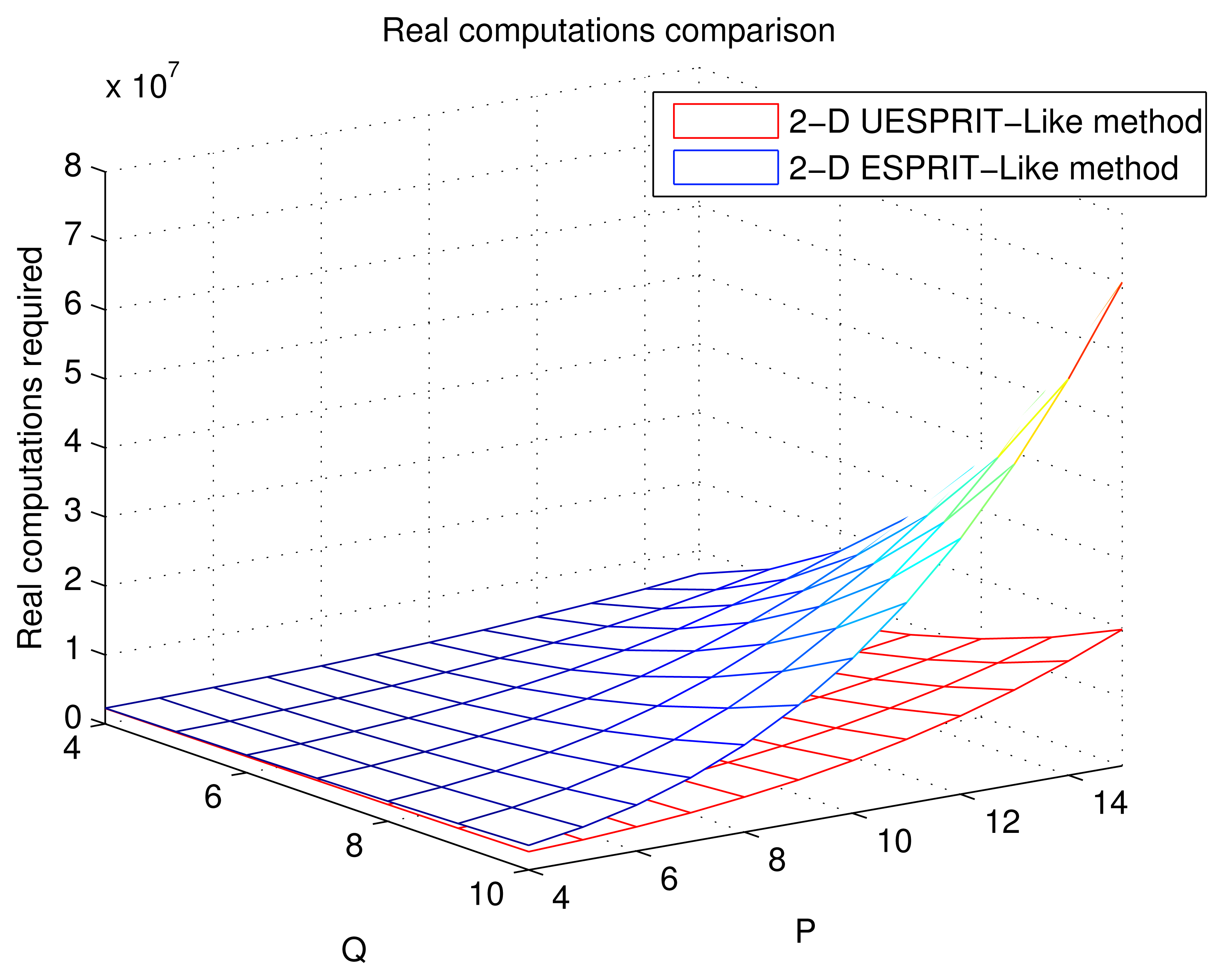
According to Equations (34) and (35), the computational saving of our method is about 15(PQ)3, caused by the unitary transformation. In [8], the author recommended the scope of P, Q given below:
Figure 2 is plotted to compare the proposed method with the 2-D ESPRIT-like method in the aspect of real computations required as a function of P and Q. The multiplications cost in each method are computed by the sum of the corresponding column in Table 2. The snapshot number is L = 3, and the size of the URA is N × M = 30 × 20. P and Q change in the scope of [L + 1, (N + 1)/2] and [L + 1, (M + 1)/2]. The figure shows that as P and Q increase, the complexities of estimating the 2-D DOA with two different algorithms increase, as well. The computations needed for our new method is much less than that of the 2-D ESPRIT-like method when P and Q go towards the upper bound. Therefore, we conclude that the proposed scheme can obtain dramatic computational savings in estimating the elevation and azimuth.
5. Simulation Results
In this section, we present simulation results that compare the proposed method with several other 2-D DOA estimations in the presence of a zero mean Gaussian white noise. Except the developed scheme, DOA extractions and pairings in other methods are all performed using MMEMP [9].
Suppose K narrowband equipowered signals are incident on a 11 × 9 URA (i.e., N = 11, M = 9) with interelement spacing dx = dy = λ/2. The correlation factor between the first signal and the others is denoted as γs. When γs equals 1, they are coherent and completely uncorrelated when γs = 0. We generate correlated signals via:
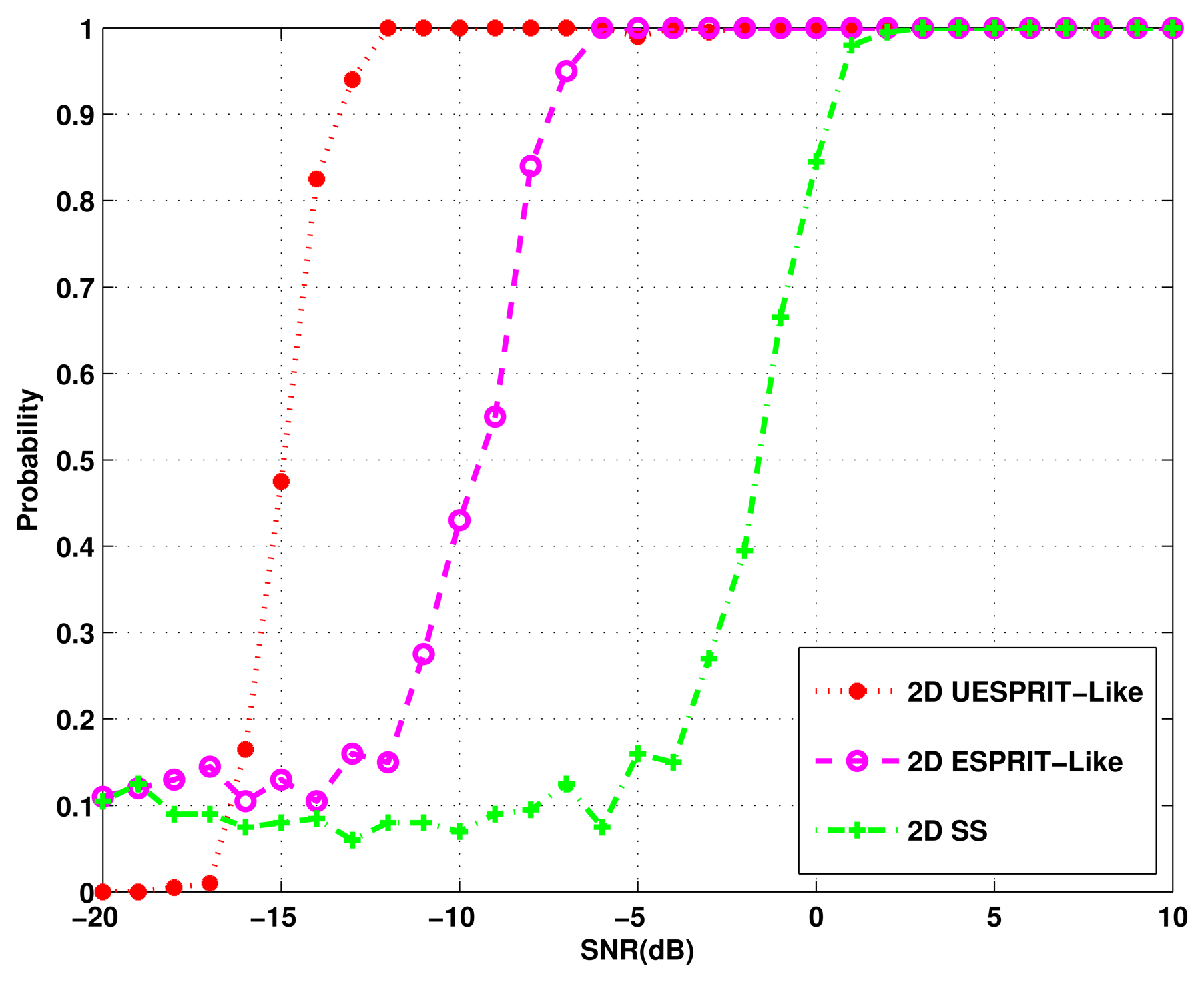
First, we consider three coherent signals from (ϕ, θ) = (10°, 0°), (5°,−5°), (−5°, 7°) with SNR varying from −20 dB to 10 dB. 1,000 Monte Carlo trials are run for each SNR. Five hundred snapshots are taken to form the estimate of the covariance matrix of the array outputs. Figure 3 shows the probability of identifying all the directions correctly versus SNR. The result illustrates that the performance of both the proposed algorithm and 2-D ESPRIT-like method are better than that of 2-D spatial smoothing (2-D SS). This is because the first two algorithms can eliminate the coherency of signals completely by reconstructing the equivalent covariance matrix R(n, m) by Equation 10, while the 2-D SS method can only provide the alleviation of the rank deficiency to some extent. The graph also shows that the new method has some improvement over the 2-D ESPRIT-like method, due to the fact that the achievement of RY in our method is similar to the forward-backward spatial smoothing process [14], which can further enhance the ability of decorrelation.
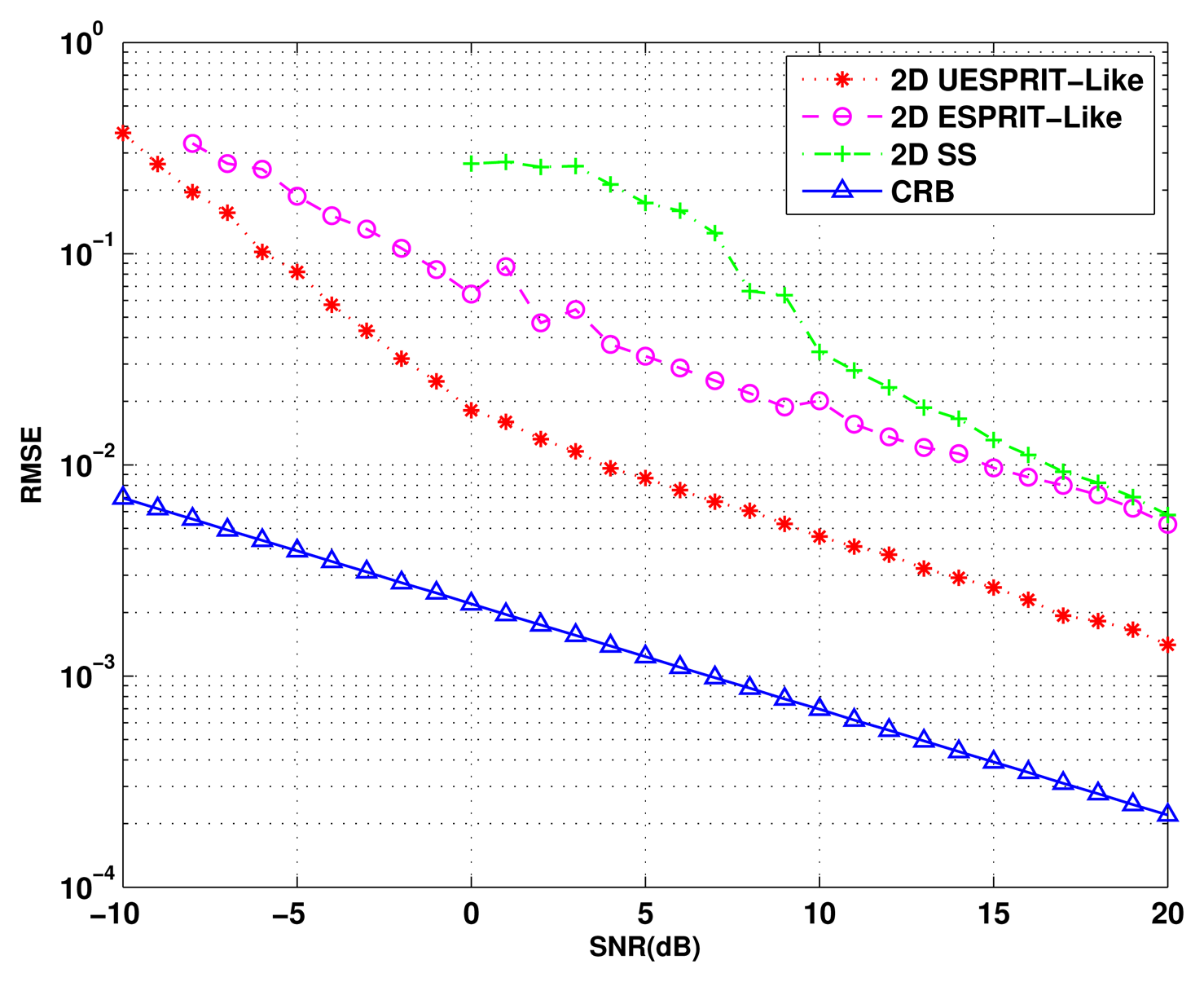
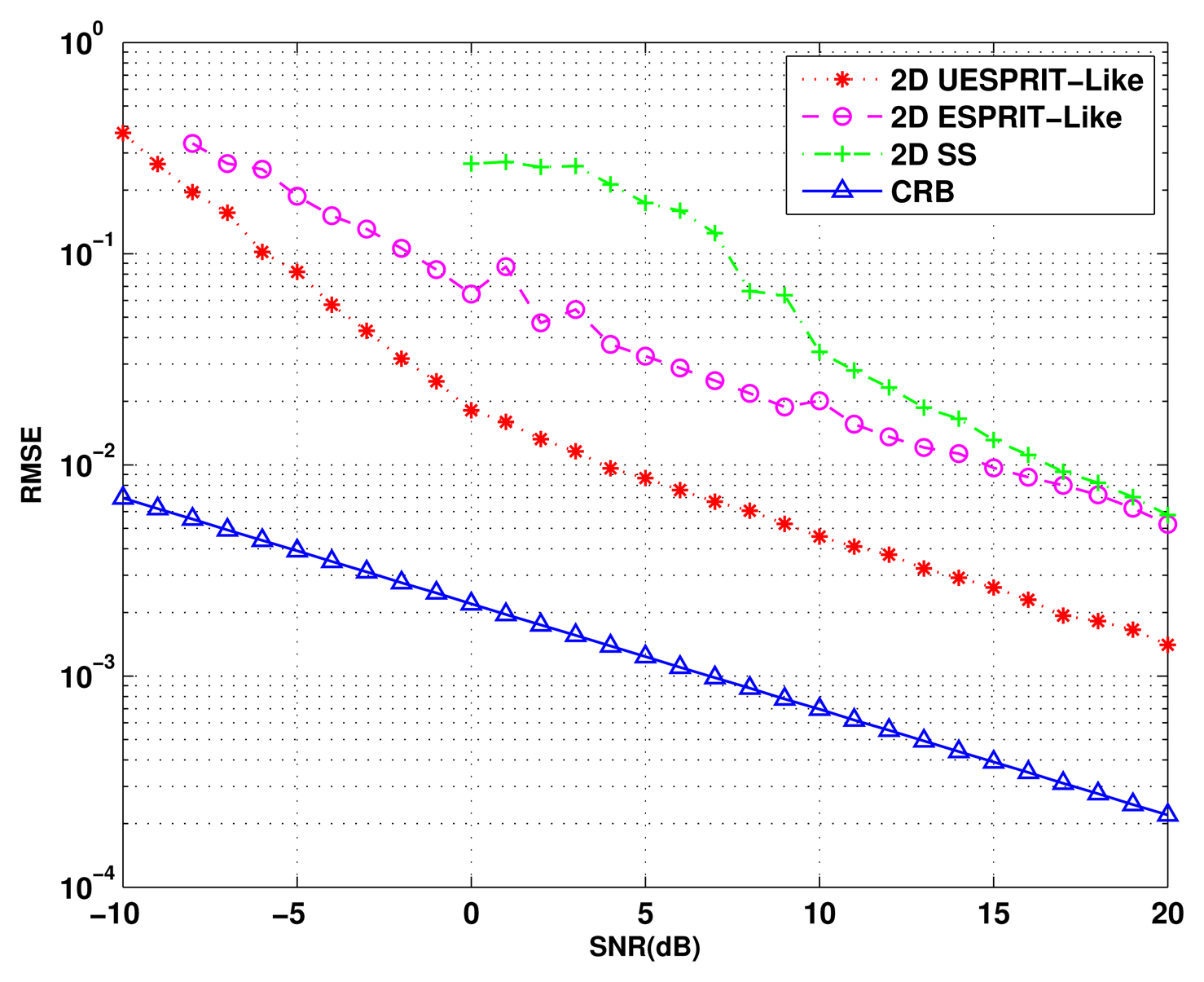
Second, we consider the same scenario as in the first one. Define the root mean square error (RMSE) of the DOA estimates as:
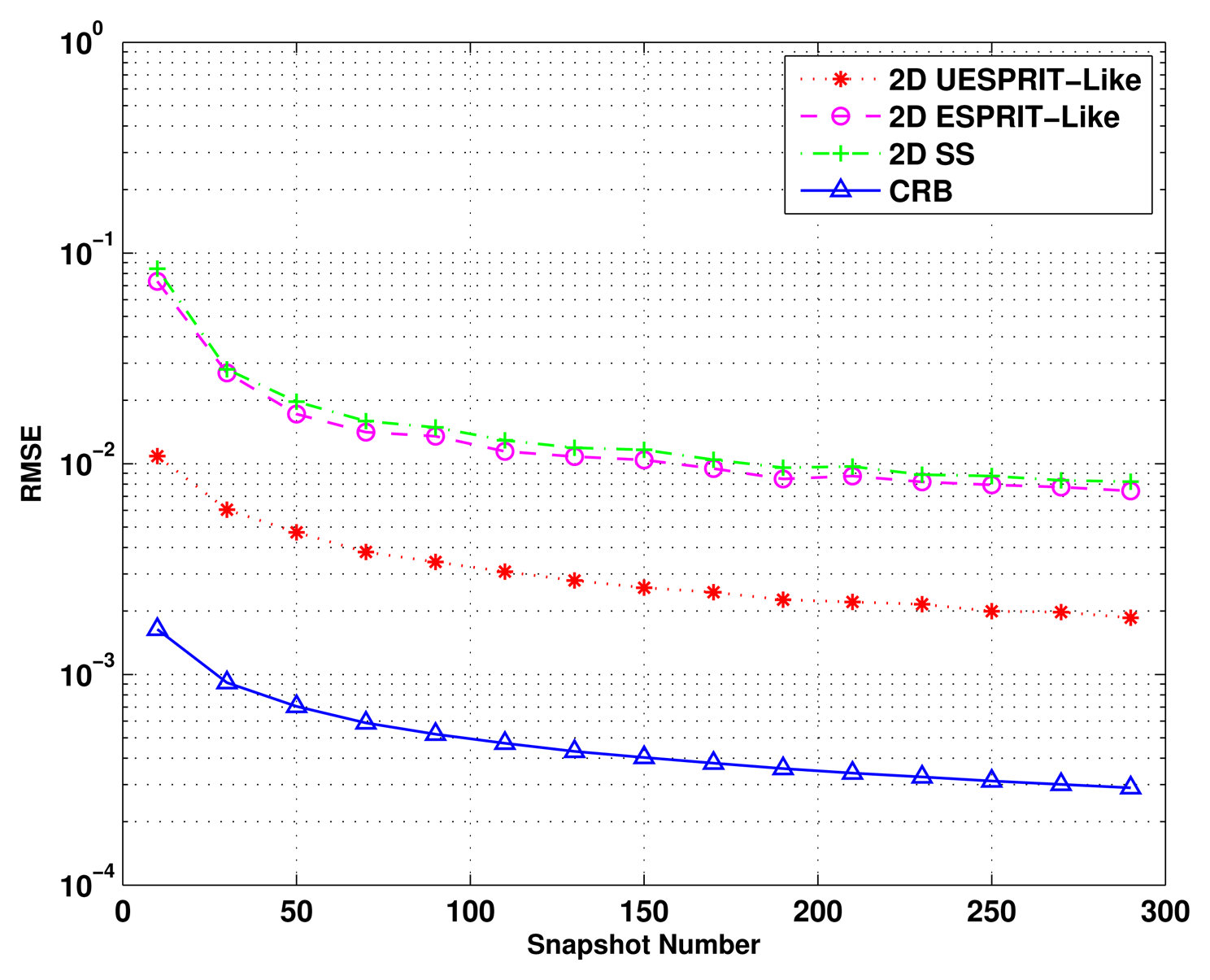
The third simulation considers the same signals as the above two experiments with SNR = 20 dB. The snapshot number, L, changes from 10 to 300. The RMSE of the 2-D estimates as a function of the snapshot number and the CRB are plotted in Figure 5. As expected, the 2-D UESPRIT-like method is shown to have dramatically high accuracy over the other two and can achieve the closest performance to CRB.
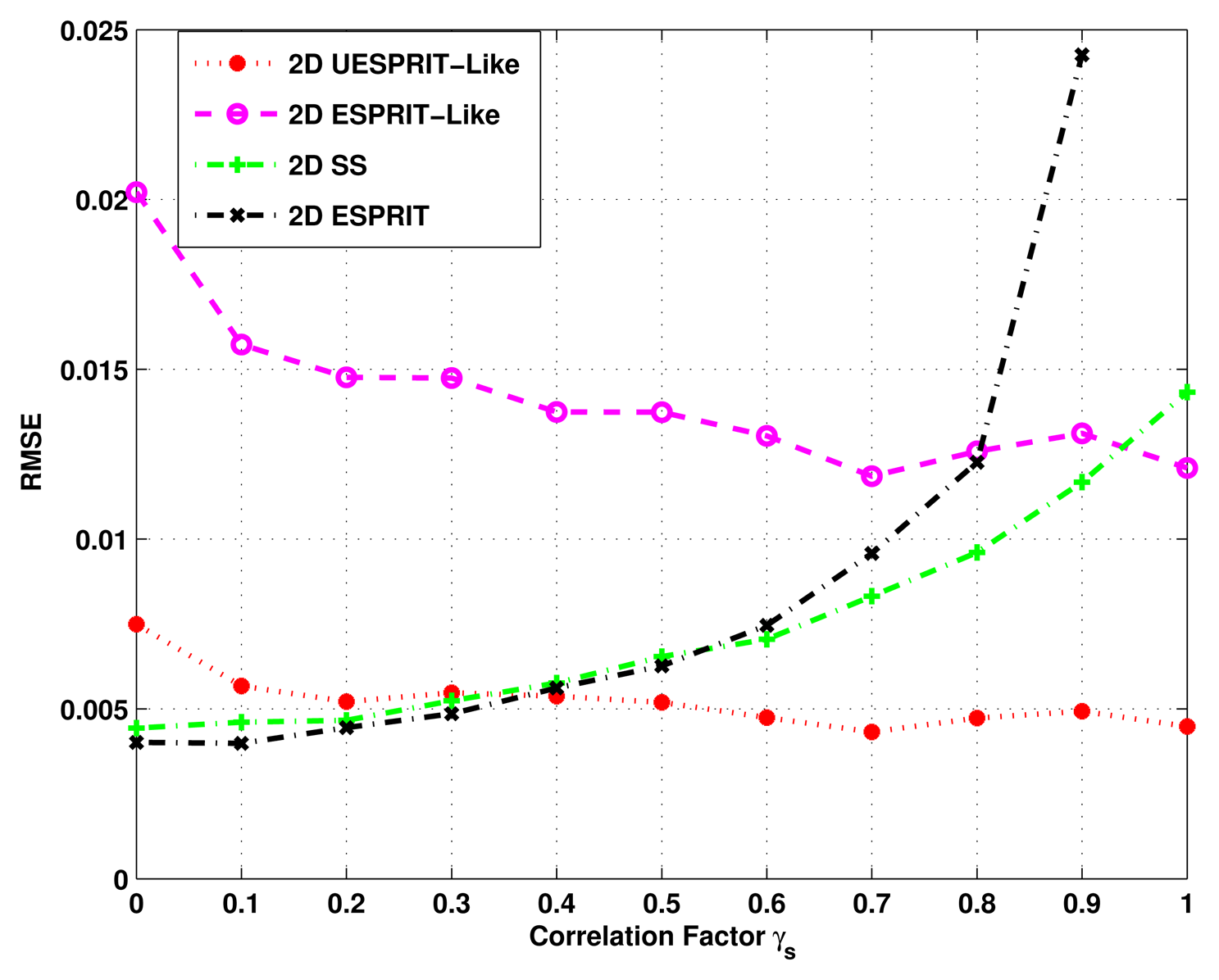
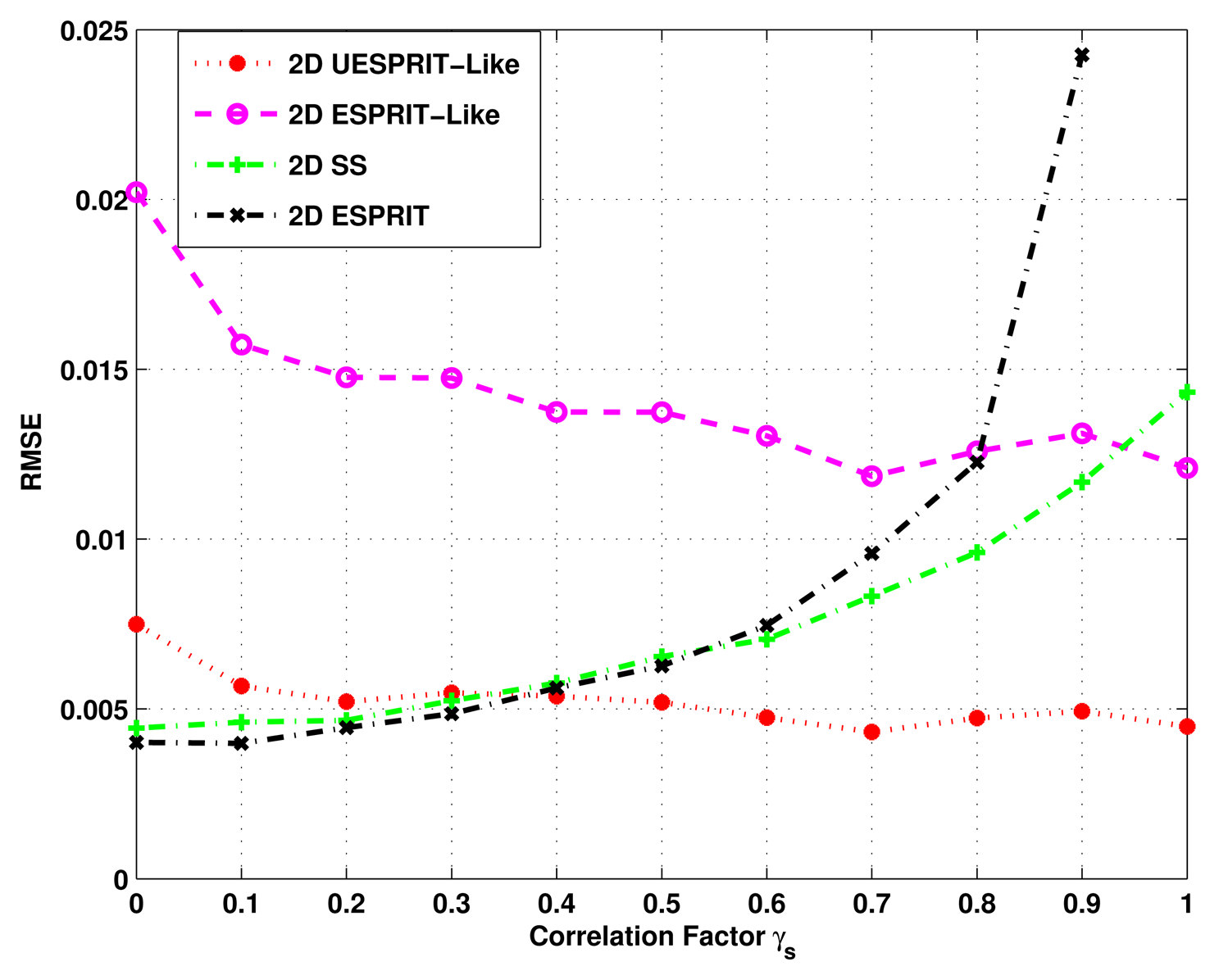
In the last simulation, we investigate the ability of four algorithms to decorrelate coherent signals. Assume there are two narrowband signals with (ϕ, θ) = (10°, 0°), (5°, −5°) and SNR = 5dB. Their correlation factor varies in the range (0,1). For each value of γs, 1,000 independent estimates are carried out to examine the RMSE of DOA estimates. First, we compare the 2-D ESPRIT method with the other three decorrelation algorithms. As Figure 6 has shown, when the signals are uncorrelated or partly correlated with low correlation factor, the conventional 2-D ESPRIT is the best choice for DOA estimation. The reason is the use of decorrelation in the other methods results in a small effective aperture, which can reduce the resolution significantly. However, as γs increases, the performance of the 2-D ESPRIT degrades slowly. Until γs = 0.9, it totally fails to identify DOA, because of the serious rank loss of Rx. Besides, Figure 6 also demonstrates that the 2-D SS method provides a much better performance than the 2-D ESPRIT-like method, as well as our proposed method, when rs ≤ 0.32. This is due to the fact that in such a low correlation, it is sufficient for 2-D SS to decorrelate signals, and it can restrain noise to some extent. When the signals become nearly coherent, that is γs ≥ 0.95, the superiority of our proposed scheme and the 2-D ESPRIT-like method appears to be remarkable for the excellent decorrelation ability, while in terms of the veracity of DOA estimates, it is obvious that the new method outperforms 2-D ESPRIT-like method all the time.
6. Conclusions
An application of unitary transformation to 2-D DOA estimation of coherent sources has been proposed in this paper. The decorrelation is performed based on the existing 2-D ESPRIT-like method. While the computational load is significantly reduced by transforming the complex matrices into real-valued ones and conducting the EVD with 1-D matrices, the 2-D UESPRIT-like method can also provide better performance in DOA estimation by preprocessing the block Hankel matrix using the forward-backward averaging-like method. Computational analysis and simulation results have shown the significant reduction of computations and the dramatic low RMSE in DOA estimations. A less restrictive requirement for the array geometry is also provided to generalize the application of this method.
It is worth mentioning that our proposed algorithm is fit for dealing with the estimation of highly correlated signals. In the situation where all the signals are uncorrelated or partly correlated, the method given in this paper will suffer degradation to some extent.
It is also interesting to notice that our new algorithm is still practically useful in the presence of mutual coupling, though such an effect was not considered in this paper. For 2-D DOA estimation in URA, if the mutual coupling matrix (MCM) is known, the coupling effect can be easily eliminated by premultiplying the inverse MCM with the original data. If the MCM is unknown, we can also use the method provided in [20] to completely alleviate the mutual coupling by setting the sensors on the boundary of the URA as auxiliary sensors, provided that the MCM satisfies the block banded symmetric Toeplitz assumption. The output of the middle URA is, therefore, an ideal model without a coupling effect. Moreover, the 1-D version of our proposed method, namely 1-D UESPRIT [21], can be extended to the azimuth estimation with the Uniform Circular Array (UCA) in the presence of mutual coupling. In this case, the elevation is assumed to be known. The mutual coupling can be directly compensated for if the coupling effect is not so serious and the MCM is known [22]. Then, the array manifold of the UCA is projected by a coupling matrix onto that of an ideal UCA, where the azimuth estimation is the same as that of ULA, and the 1-D UESPRIT method can be directly conducted. However, it cannot be applied to the method proposed in [23] when the number of antenna elements in the UCA is large enough, as the H matrix used to incorporate all the relevant phase modes into the principal term destroys the Vandermode structure of the beamspace steering vector. Besides, the new method may not be applied as well in the more realistic situation of 2-D DOA estimation with UCA, as the UCA ESPRIT and UCA-ESPRIT-like involved in the algorithms [19,24] are different from the 2-D ESPRIT of URA [17]. Moreover, the elevation-dependence of MCM prevents the application of our approach to the method in [25]. Future work may focus on the real-valued processing of UCA ESPRIT, utilizing the special structure of unitary matrix.
Acknowledgments
This work is supported by the National Natural Science Foundations of China under Grant No.61172166 and 11074270.
References
- Jian, C.; Wang, S.; Lin, L. Two-Dimensional DOA Estimation of Coherent Signals Based on 2D Unitary ESPRIT Method. Proceedings of 2006 8th International Conference on the Signal Processing, Beijing, China, 16– 20 November 2006; Volume 1.
- Wu, Y.; Chen, H.; Chen, Y. A Method of 2-D DOA Estimation of Coherent Signals Based on Uniform Circular Array via Spatial Smoothing. Proceedings of 2011 IEEE CIE International Conference on the Radar (Radar), Chengdu, China, 15– 18 October 2011; Volume 1, pp. 312–314.
- Gu, J.F.; Wei, P.; Tai, H.M. 2-D direction-of-arrival estimation of coherent signals using cross-correlation matrix. Signal Process. 2008, 88, 75–85. [Google Scholar]
- Gu, C.; He, J.; Zhu, X.; Liu, Z. Efficient 2D DOA estimation of coherent signals in spatially correlated noise using electromagnetic vector sensors. Multidimen. Syst. Signal Process. 2010, 21, 239–254. [Google Scholar]
- Zhang, X.; Li, J.; Xu, L. Novel two-dimensional DOA estimation with L-shaped array. EURASIP J. Adv. Signal Process. 2011, 1, 50–53. [Google Scholar]
- Yeh, C.; Lee, J.; Chen, Y. Estimating two-dimensional angles of arrival in coherent source environment. IEEE Trans. Acoust. Speech Signal Process. 1989, 37, 153–155. [Google Scholar]
- Chen, Y. On spatial smoothing for two-dimensional direction-of-arrival estimation of coherent signals. IEEE Trans. Signal Process. 1997, 45, 1689–1696. [Google Scholar]
- Hua, Y. Estimating two-dimensional frequencies by matrix enhancement and matrix pencil. IEEE Trans. Signal Process. 1992, 40, 2267–2280. [Google Scholar]
- Chen, F.; Fung, C.; Kok, C.; Kwong, S. Estimation of two-dimensional frequencies using modified matrix pencil method. IEEE Trans. Signal Process. 2007, 55, 718–724. [Google Scholar]
- Han, F.; Zhang, X. An ESPRIT-like algorithm for coherent DOA estimation. IEEE Antennas Wirel. Propag. Lett. 2005, 4, 443–446. [Google Scholar]
- Chen, F.; Kwong, S.; Kok, C. ESPRIT-like two-dimensional DOA estimation for coherent signals. IEEE Trans. Aerosp. Electron. Syst. 2010, 46, 1477–1484. [Google Scholar]
- Haardt, M.; Nossek, J. Unitary ESPRIT: How to obtain increased estimation accuracy with a reduced computational burden. IEEE Trans. Signal Process. 1995, 43, 1232–1242. [Google Scholar]
- Huarng, K.; Yeh, C. A unitary transformation method for angle-of-arrival estimation. IEEE Trans. Signal Process. 1991, 39, 975–977. [Google Scholar]
- Williams, R.; Prasad, S.; Mahalanabis, A.; Sibul, L. An improved spatial smoothing technique for bearing estimation in a multipath environment. IEEE Trans. Acoustics Speech Signal Process. 1988, 36, 425–432. [Google Scholar]
- Pillai, S.; Kwon, B. Forward/backward spatial smoothing techniques for coherent signal identification. IEEE Trans. Acoustics Speech Signal Process. 1989, 37, 8–15. [Google Scholar]
- Haardt, M.; Zoltowski, M.; Mathews, C.; Nossek, J. 2D Unitary ESPRIT for Efficient 2D Parameter Estimation. Proceedings of 1995 International Conference on IEEE the Acoustics, Speech and Signal Processing (ICASSP-95), Detroit, MI, USA, 9– 12 May 1995; Volume 3, pp. 2096–2099.
- Zoltowski, M.; Haardt, M.; Mathews, C. Closed-form 2-D angle estimation with rectangular arrays in element space or beamspace via unitary ESPRIT. IEEE Trans. Signal Process. 1996, 44, 316–328. [Google Scholar]
- Golub, G.; van Loan, C. Matrix Computations; Johns Hopkins University Press: Baltimore, ML, USA, 1996; Volume 3. [Google Scholar]
- Mathews, C.; Zoltowski, M. Eigenstructure techniques for 2-D angle estimation with uniform circular arrays. IEEE Trans. Signal Process. 1994, 42, 2395–2407. [Google Scholar]
- Ye, Z.; Liu, C. 2-D DOA estimation in the presence of mutual coupling. IEEE Trans. Antennas Propag. 2008, 56, 3150–3158. [Google Scholar]
- Ren, S.W.; Ma, X.; Yan, S. DOA estimation algorithm of coherent signals based on unitary transformation ESPRIT. Syst. Eng. Electron. 2012, 34, 1543–1548. [Google Scholar]
- Wax, M.; Sheinvald, J. Direction finding of coherent signals via spatial smoothing for uniform circular arrays. IEEE Trans. Antennas Propag. 1994, 42, 613–620. [Google Scholar]
- Goossens, R.; Rogier, H.; Werbrouck, S. UCA Root-MUSIC with sparse uniform circular arrays. IEEE Trans. Signal Process. 2008, 56, 4095–4099. [Google Scholar]
- Goossens, R.; Rogier, H. A hybrid UCA-RARE/Root-MUSIC approach for 2-D direction of arrival estimation in uniform circular arrays in the presence of mutual coupling. IEEE Trans. Antennas Propag. 2007, 55, 841–849. [Google Scholar]
- Wang, B.H.; Hui, H.T.; Leong, M.S. Decoupled 2D direction of arrival estimation using compact uniform circular arrays in the presence of elevation-dependent mutual coupling. IEEE Trans. Antennas Propag. 2010, 58, 747–755. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Real multiplications | conditions | |
|---|---|---|
| 2 [(P − 1)2P + P2(P − 1)] | / | |
| K1,K2 | 2PQ(P − 1) | / |
| K1Esϕ, K2Esϕ | 2PQ2(P − 1)L | / |
| SVD of T1 | (2L)2(P − 1)Q+ 17(2L)3/3 | PQ > (P −1)Q |
| ϒu | L3 | / |
| 2 [(Q − 1)2Q + Q2(Q − 1)] | / | |
| K3,K4 | 2PQ(Q − 1) | / |
| K3Esϕ, K4Esϕ | 2P2Q(Q − 1)L | / |
| SVD of T2 | (2L)2P(Q − 1)+ 17(2L)3/3 | PQ > P(Q − 1) |
| ϒυ | L3 | / |
| 2D UESPRIT-Like Method | 2D ESPRIT-Like Method | |
|---|---|---|
| Rx | 2M N(M N +1)L | 2M N(M N +1)L |
| Ry | 4 × [2PQ(N − P/2)(M − Q/2)] | 4 × [2PQ(N − P/2)(M − Q/2)] |
| φ | 2(PQ)2 + 4PQ | / |
| EVD | of φ: 5(PQ)3 | of Ry: 20(PQ)3 |
| The rest of the operations | 2D Unitary ESPRIT:C1 + 20L3 | MMEMP: C2 |
© 2013 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license ( http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Ren, S.; Ma, X.; Yan, S.; Hao, C. 2-D Unitary ESPRIT-Like Direction-of-Arrival (DOA) Estimation for Coherent Signals with a Uniform Rectangular Array. Sensors 2013, 13, 4272-4288. https://doi.org/10.3390/s130404272
Ren S, Ma X, Yan S, Hao C. 2-D Unitary ESPRIT-Like Direction-of-Arrival (DOA) Estimation for Coherent Signals with a Uniform Rectangular Array. Sensors. 2013; 13(4):4272-4288. https://doi.org/10.3390/s130404272
Chicago/Turabian StyleRen, Shiwei, Xiaochuan Ma, Shefeng Yan, and Chengpeng Hao. 2013. "2-D Unitary ESPRIT-Like Direction-of-Arrival (DOA) Estimation for Coherent Signals with a Uniform Rectangular Array" Sensors 13, no. 4: 4272-4288. https://doi.org/10.3390/s130404272