Data Acquisition, Analysis and Transmission Platform for a Pay-As-You-Drive System

Abstract
:
1. Introduction
2. Pay As You Drive
- Respect for speed limits: GPS data and current speed are checked against the road database to ascertain the current speed limit and then check if the vehicle is within it.
- Driving style: This paper suggests accelerating and braking hard demonstrates an aggressive driving style. The system analyses these two factors to judge if the vehicle is being driven aggressively. It also estimates the number of occupants per trip by detecting the number of doors opened and seatbelts fastened.
- Driver mobile-telephone use: Many studies show that driver mobile-telephone use increases driving risk [14–17]. This risk also extends to pedestrians [18]. It is estimated that mobile telephone use for one hour per month increases the risk of having an accident by 400–900% [19]. A Dutch study estimates that zero mobile-telephone use whilst driving would prevent nearly 600 road deaths and hospital admissions per year in the Netherlands (2004 data), while a US study estimates that telephone use whilst driving in the US results in around 2,600 deaths and 330,000 serious injuries per year [20].
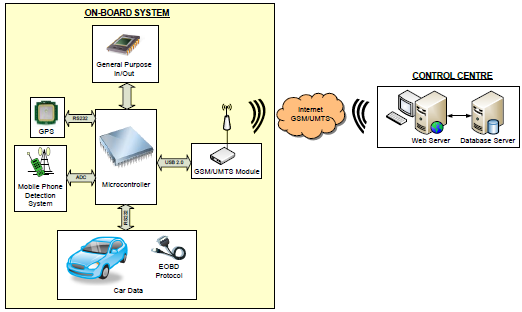
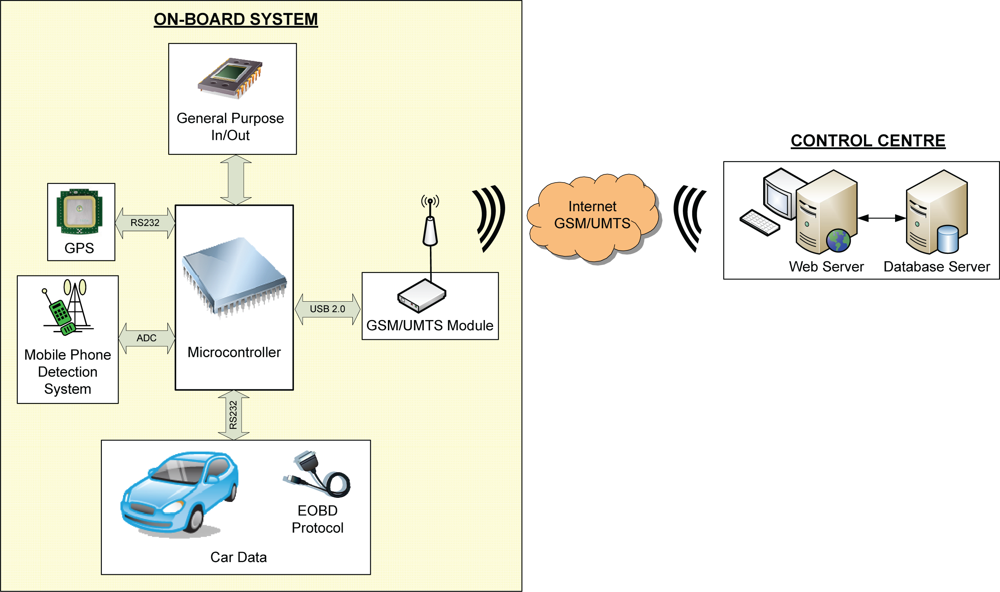
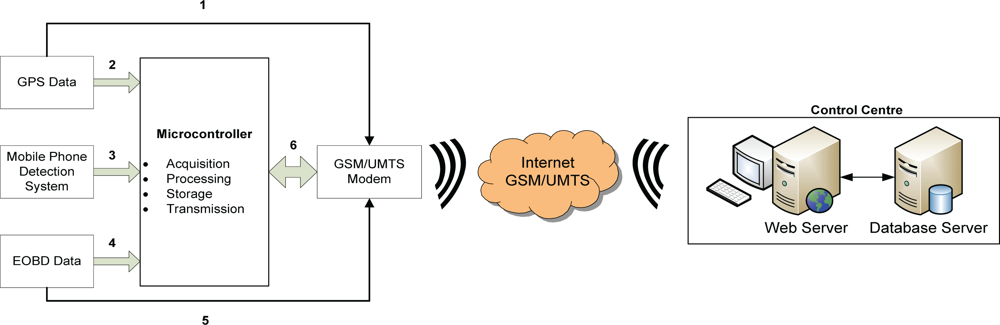
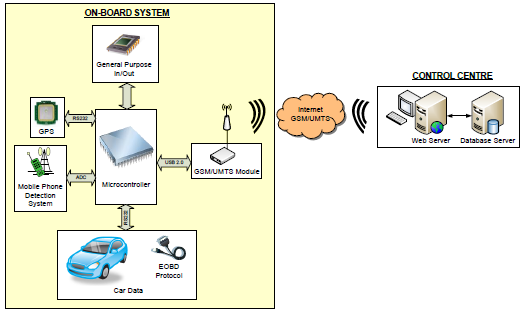
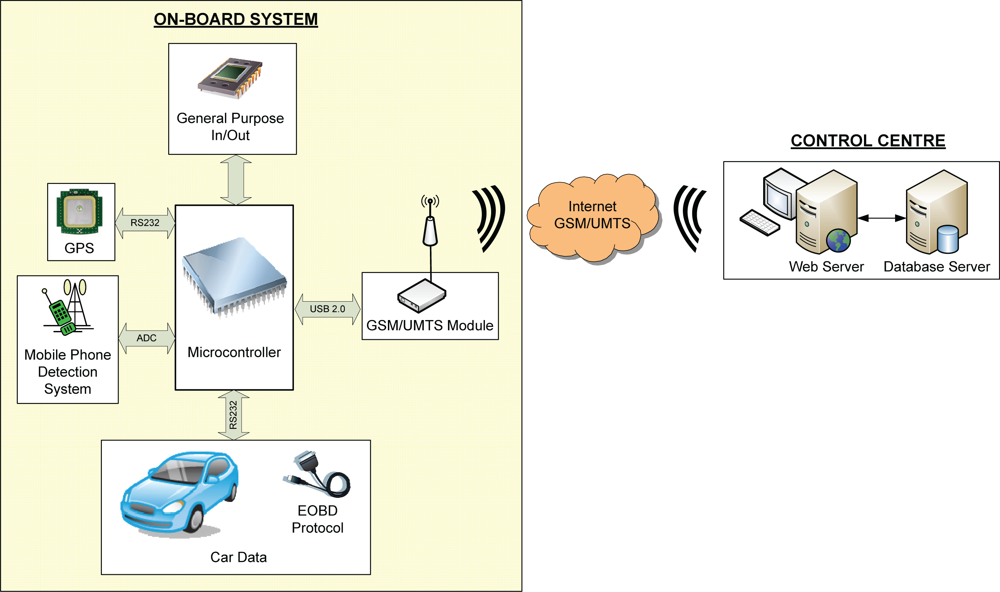
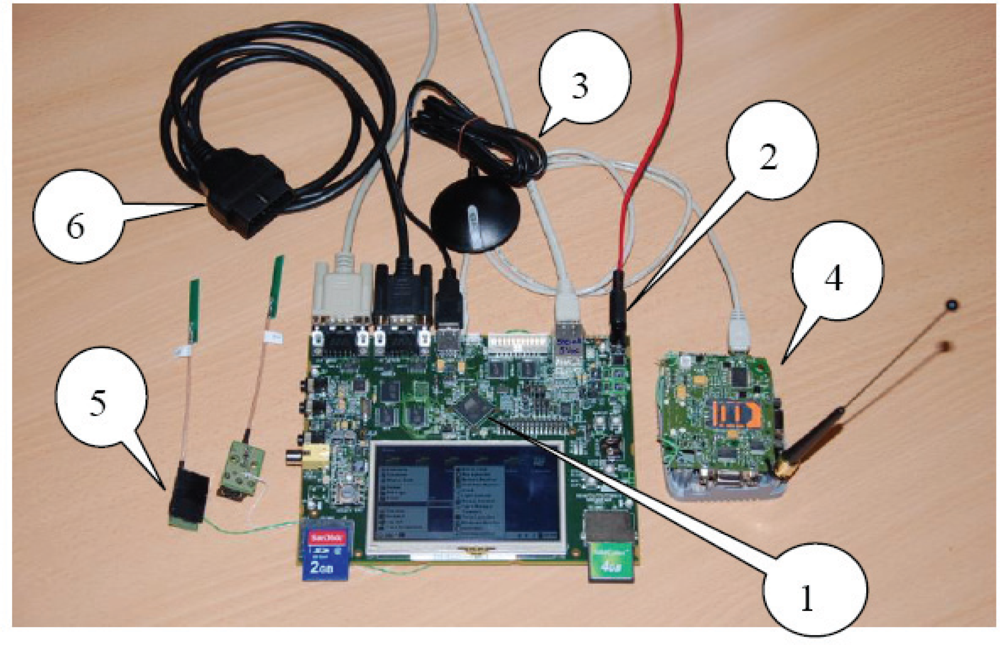
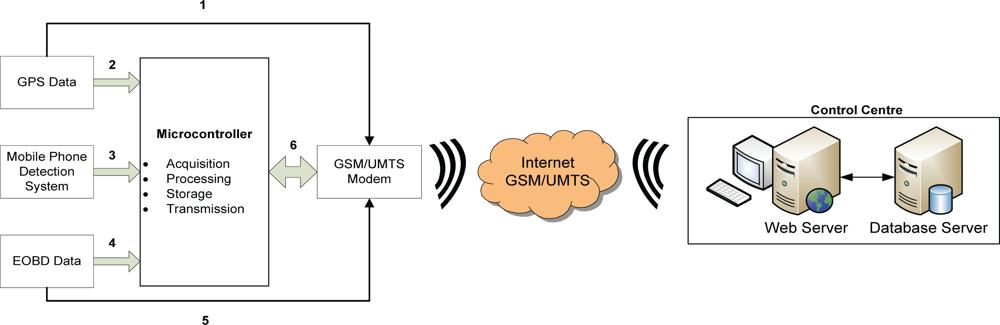
3. System Architecture
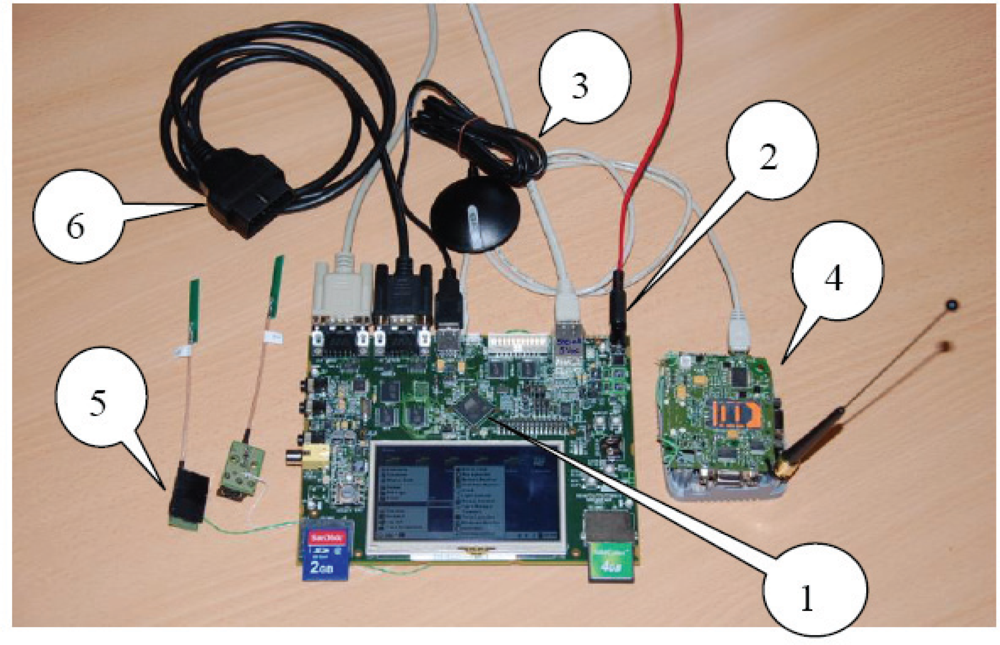
- Processor: AT91SAM9M10 (400-MHz ARM926 core, 128 MB of SDRAM and 4 GB of NAND Flash memory) with a series of integrated peripherals (USB, Ethernet, SD/MMC card reader, serial interfaces, etc.). The system also includes a 3.5” touch-screen (only used during development and debugging). The platform uses the Linux operating system to implement the required functions (GPS data processing, mobile telephone communications, signal processing, data file management, etc.).
- Power supply: Dual source (vehicle and device battery) to ensure device operation if the car battery is disconnected.
- GPS module: Commercially available model (EM408, based on the SiRF Star III chipset) connected to the microcontroller via a Universal Asynchronous Receiver/Transmitter (UART) interface and configured as a 4800-bps, 8-bit, non-parity serial line. The NMEA 0813 standard is used to obtain the data. This standard allows for code portability and replacement of the GPS module without having to modify the rest of the platform.
- MTX-H2 modem: The UMTS and High Speed Downlink Packet Access (HSDPA) protocols are used to transmit and receive data between the OS and the CC. This module is controlled by the microcontroller using AT commands (Attention command and standardized modem control commands).
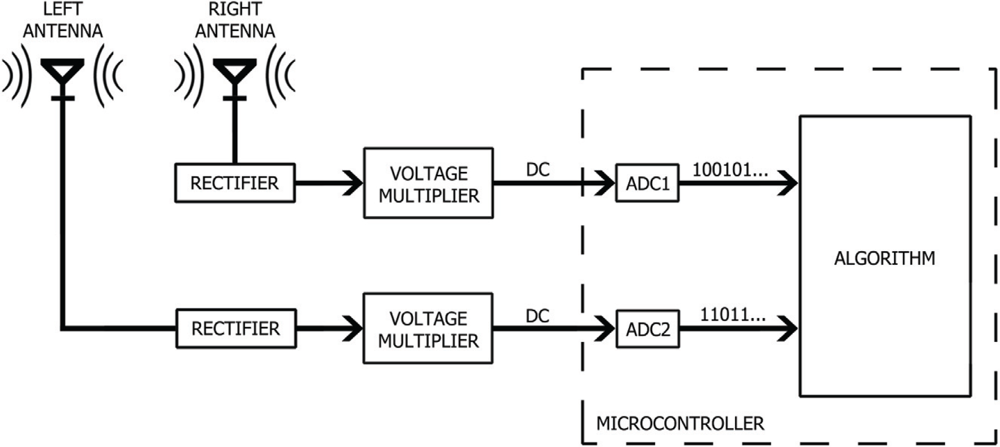
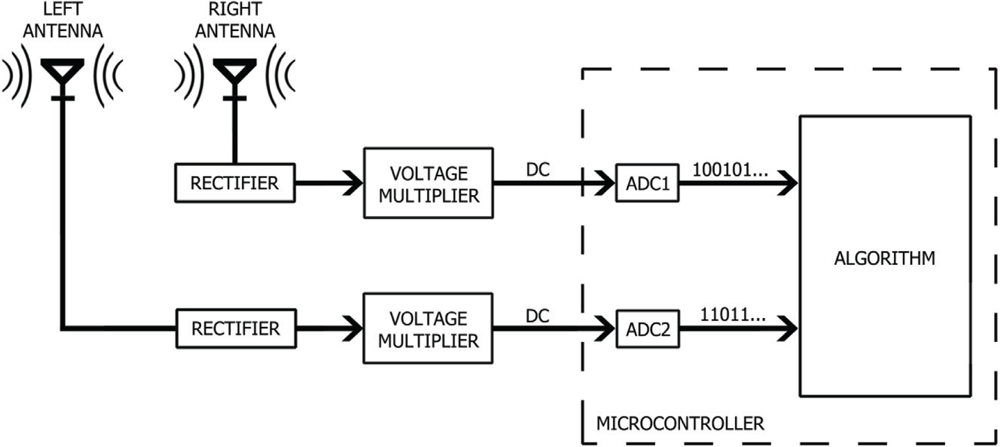
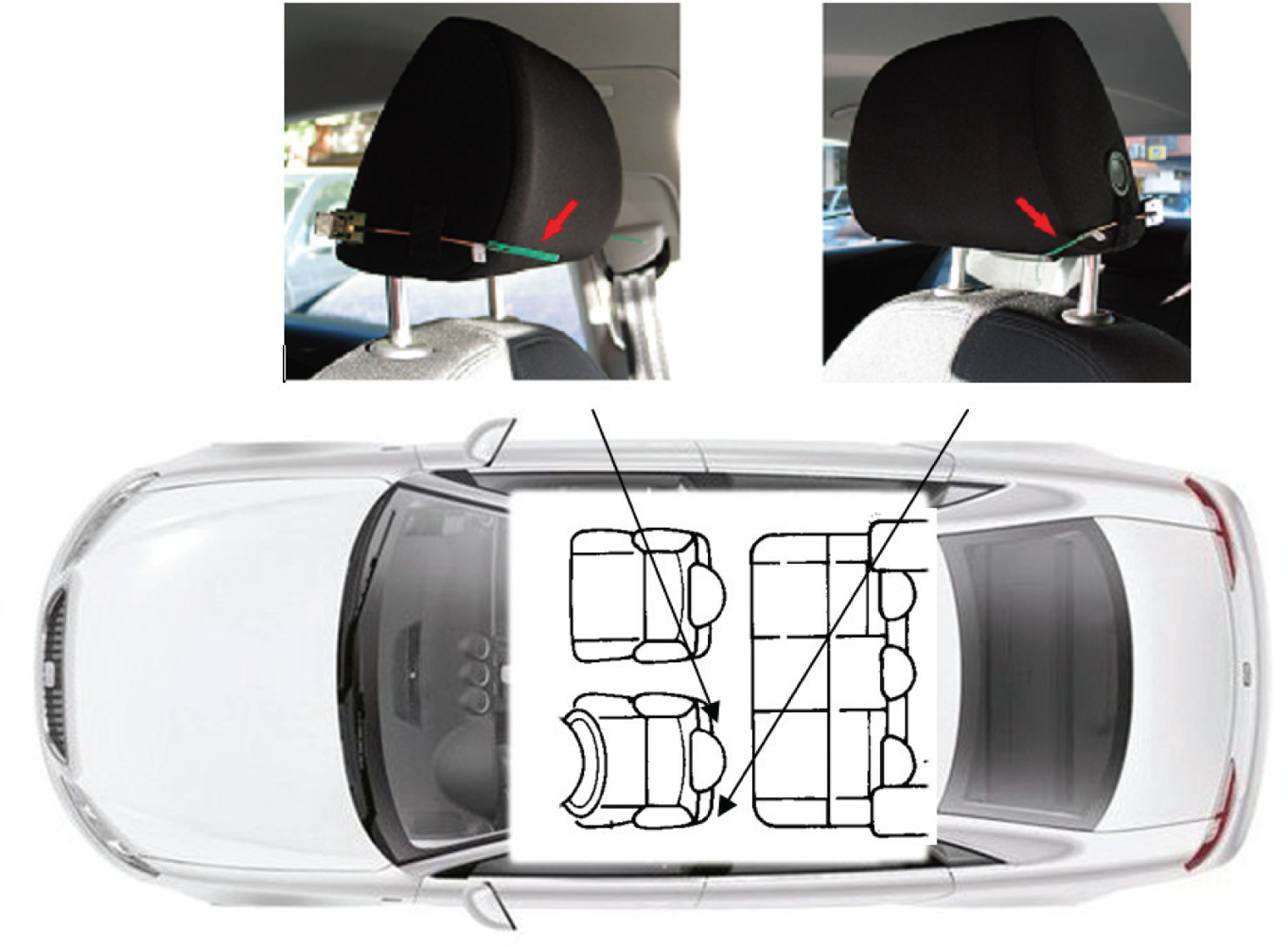
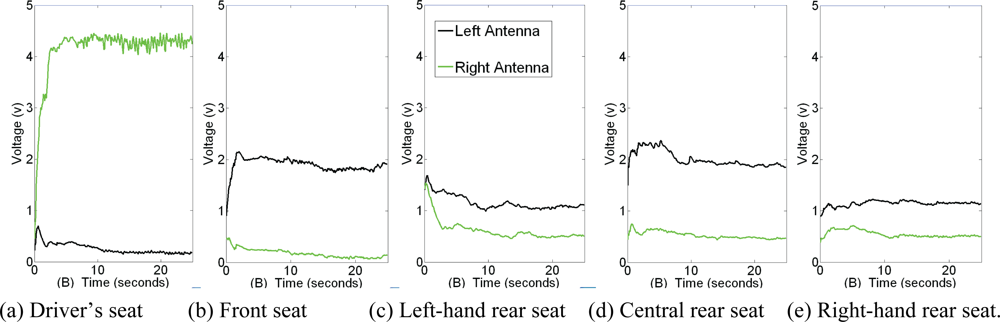
- RF harvesting block (mobile-telephone detection circuit): Electronic system used to detect driver mobile-telephone use.
- EOBD connection: Achieved via a bespoke interface based on the ELM327 integrated circuit and capable of communicating via any protocol currently in use (i.e., ISO 9141-2, ISO 14230-4, SAE J1850 (PWM and VPM), ISO 15765-4 and SAE J1939). Data is converted into packets transmitted to the microcontroller via an RS-232 serial interface. This enables the platform to acquire the data needed from the EOBD system, which monitors the vehicle’s various parameters via a series of sensors and generates and logs warnings in case of malfunction. Examples of the data available include engine revolutions per minute (RPM), fuel consumption, number of seatbelts fastened, etc.
- Control Centre. The CC consists of two servers, a web server (Apache Tomcat server), which hosts the application used to communicate between the vehicles and the graphic interface, and a database server (MySQL database server), which stores and processes the data used to assess each vehicle’s level of risk [21,22]. The CC can be configured to inform users by e-mail or Short Message Service (SMS) about the estimated level of risk over a set time period. This feedback could increase user awareness about the risk associated with certain driving habits and encourage improvement.
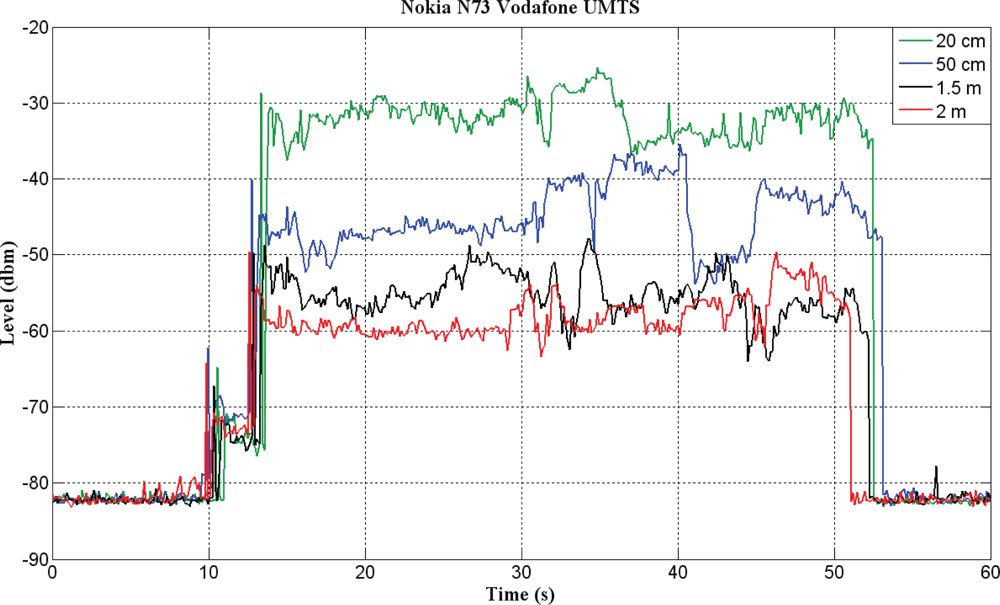
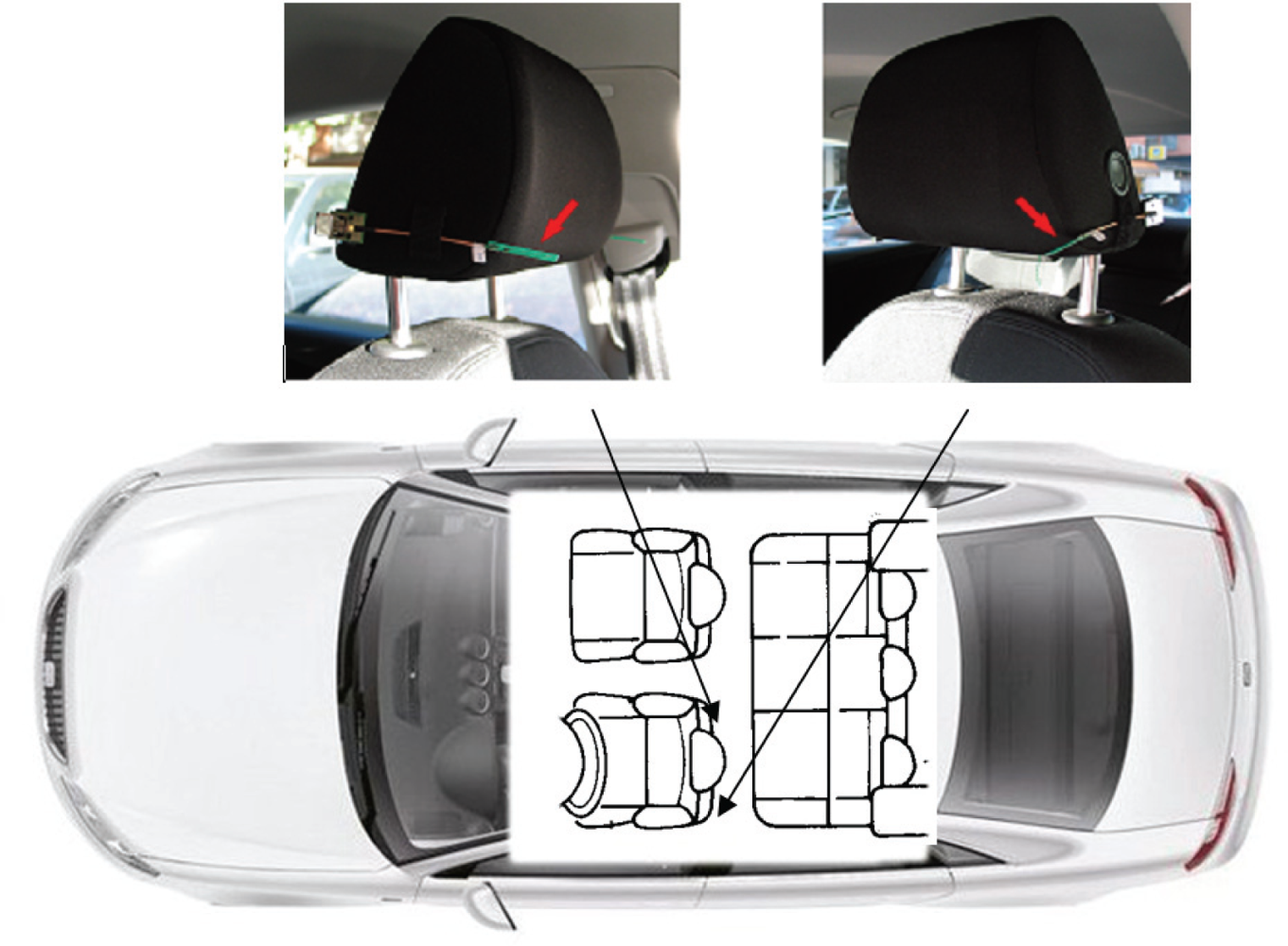
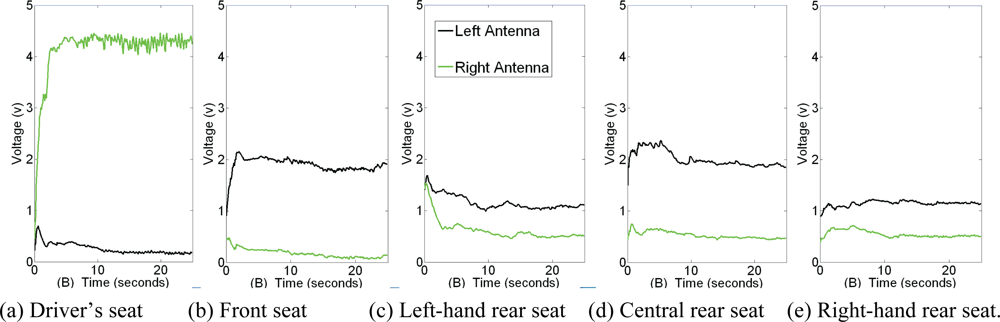
4. Detection of Driver Mobile-Telephone Use
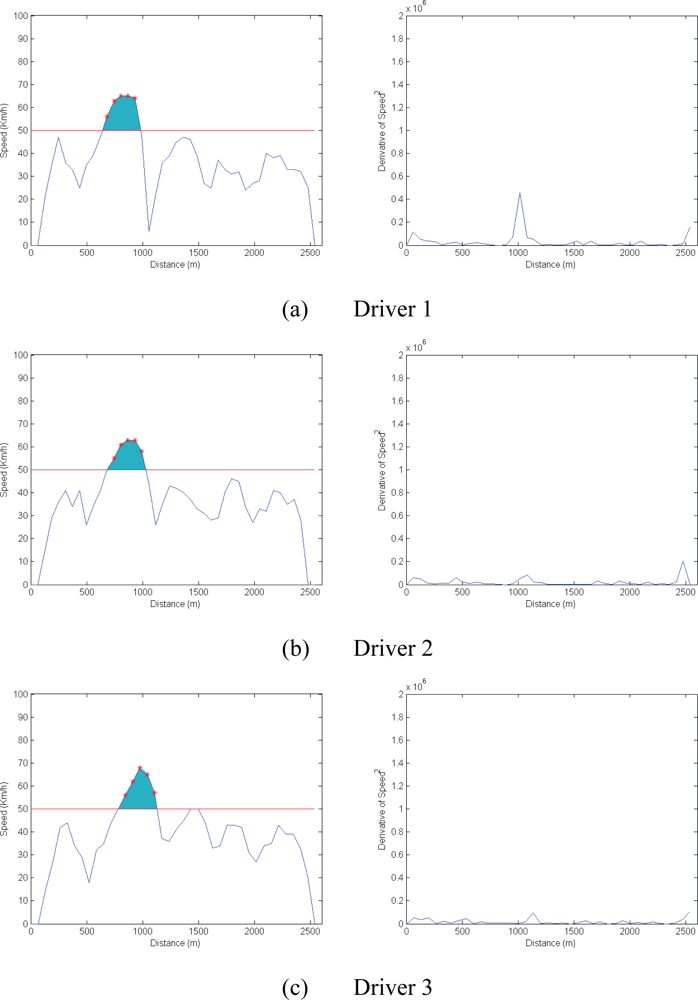
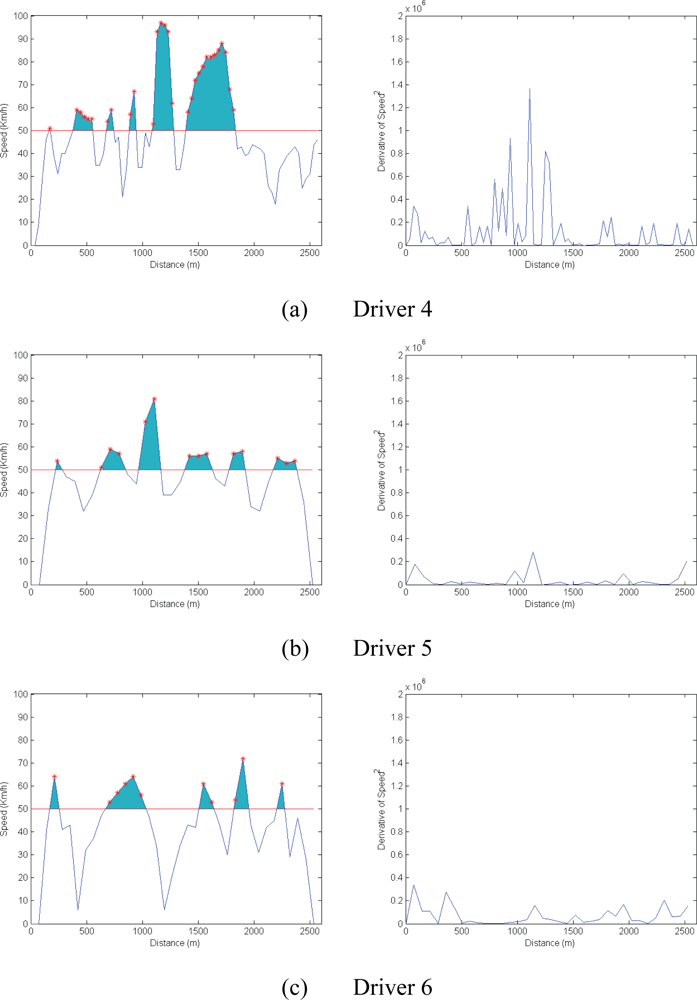
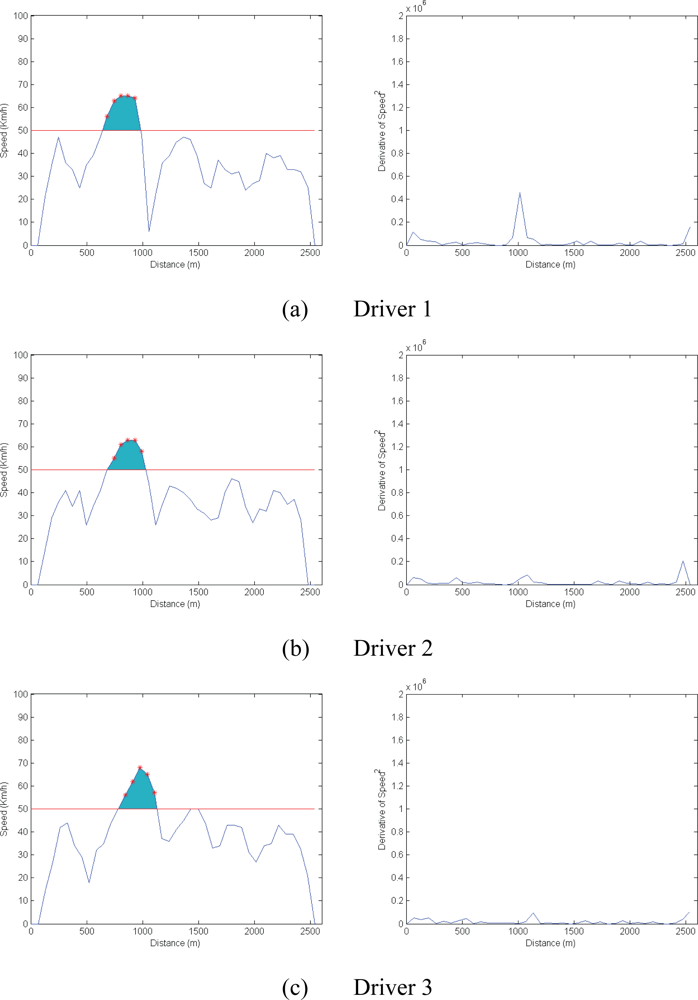
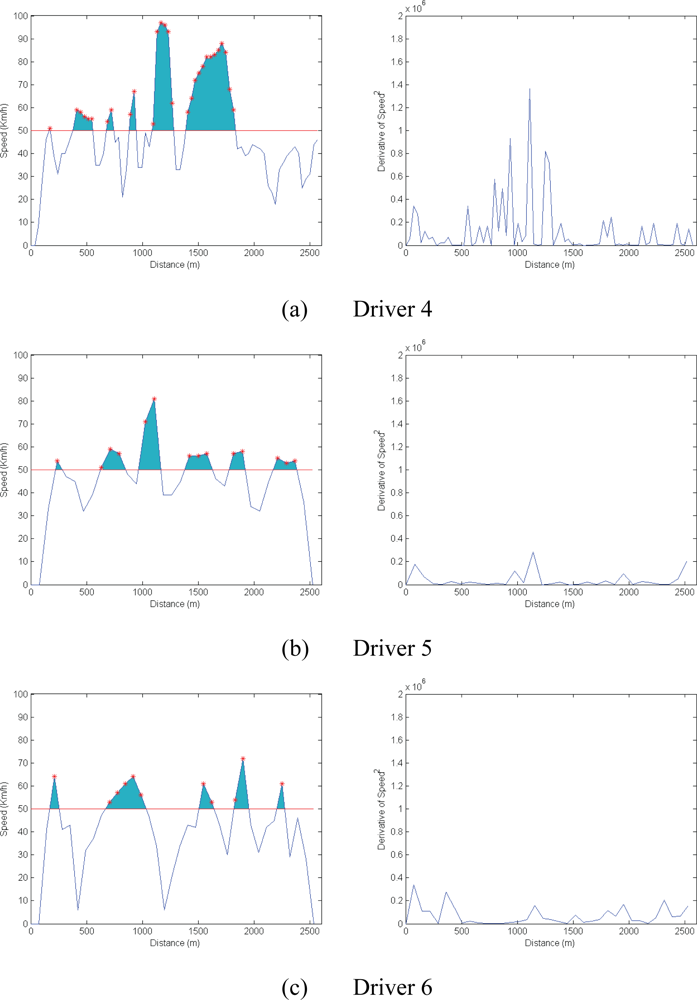
5. Non-Aggressive Versus Aggressive Driving
6. Data Processing
| CF: | Fixed charge. |
| NK: | Number of kilometres travelled by the vehicle. |
| %TZi: | Percentage of time the vehicle is in zone i (based on a two-zone division). |
| %TDAY, TNIGHT: | Percentage of time the vehicle is used during the day/night. |
| NOCCUPANTS: | Average number of vehicle occupants. |
| k1,…k9: | Appropriate constants. |
7. Conclusions
Acknowledgments
References
- Lin, C.E.; Shiao, Y.S.; Li, C.C.; Yang, S.H.; Lin, S.H.; Lin, C.Y. Real-time remote onboard diagnostics using embedded GPRS surveillance technology. IEEE Trans. Veh. Tech 2007, 56, 1108–1118. [Google Scholar]
- Sa, J.S.; Chung, N.H.; Sunwokk, M.H. Experimental analysis of driving patterns and fuel economy for passenger cars in Seoul. Int. J. Automot. Technol 2003, 4, 101–108. [Google Scholar]
- Conci, N.; De Natalea, F.G.B.; Bustamante, J.; Zangherati, S. A wireless multimedia framework for the management of emergency situations in automotive applications: The AIDER system. Signal Process. Image Commun 2005, 20, 907–926. [Google Scholar]
- Angkititrakul, P.; Petracca, M.; Sathyanarayana, A.; Hansen, J.H.L. UTDrive: Driver behaviour and speech interactive systems for in-vehicle environments. Proceedings of IEEE Intelligent Vehicles Symposium, Istanbul, Turkey, June 13–15, 2007.
- Edlin, A.S. Per-Mile Premiums for Auto Insurance. Economics for an Imperfect World: Essays in Honor of Joseph Stiglitz; MIT Press: Cambridge, MA, USA, 2003; Available online: http://works.bepress.com/aaron_edlin/28/ (accessed on 10 May 2010).
- Litman, T. Distance-Based Vehicle Insurance Feasibility, Benefits and Costs: Comprehensive Technical Report. VTPI 2008. Available online: www.vtpi.org/dbvi_com.pdf/ (accessed on 9 May 2010).
- Parry, I.W.H. Comparing alternative policies to reduce traffic accidents. J. Urb. Econ 2004, 54, 346–368. [Google Scholar]
- Greenberg, A. Designing pay-per-mile auto insurance regulatory incentives. Transp. Res. D 2009, 14, 437–445. [Google Scholar]
- Winkelman, S. Travel Demand and Urban Form: Lessons and Visions. Proceedings of Asilomar Conference on Transportation and Climate Policy, Pacific Grove, CA, USA, August 22, 2007.
- Soria, J. Factor Humano. Seguridad Vial. 2001, p. 150. Available online: www.dgt.es/revista/num150/pdf/factorhumano.pdf/ (accessed on 9 May 2010).
- Petridou, E.; Moustaki, M. Human factors in the causation of road traffic crashes. Eur. J. Epidemiol 2000, 16, 819–826. [Google Scholar]
- European Transport Policy for 2010: Time to Decide. Available online: http://ec.europa.eu/transport/strategies/2001_white_paper_en.htm (accessed on 2 December 2010).
- Hirst, W.M.; Mountain, L.J.; Maher, M.J. Are speed enforcement cameras more effective than other speed management measures? An evaluation of the relationship between speed and accident reductions. Accid. Anal. Prevent 2005, 37, 731–741. [Google Scholar]
- Walsh, S.P.; White, K.M.; Hyde, M.K.; Watson, B. Dialling and driving: Factors influencing intentions to use a mobile phone while driving. Accid. Anal. Prev 2008, 40, 1893–1900. [Google Scholar]
- Charlton, S.G. Driving while conversing: Cell phones that distract and passengers who react. Accid. Anal. Prev 2009, 41, 160–173. [Google Scholar]
- Strayer, D.L.; Drews, F.A. Cell-Phone–Induced Driver Distraction. Current Dir. Psychol. Sci 2007, 16, 128–131. [Google Scholar]
- McEvoy, S.P.; Stevenson, M.R.; Woodward, M. Phone use and crashes while driving: a representative survey of drivers in two Australian states. Med. J. Aust 2006, 185, 630–634. [Google Scholar]
- Nasar, J.; Hecht, P.; Wener, R. Mobile telephones, distracted attention, and pedestrian safety. Accid. Anal. Prev 2008, 40, 69–75. [Google Scholar]
- Violanti, J.M. Cellular phones and fatal traffic collisions. Accid. Anal. Prev 1997, 30, 519–524. [Google Scholar]
- Car telephone use and road safety. Final Report. An overview prepared for the European Commission. Jeanne Breen Consulting: North Yorkshire, UK, June 2009.
- Apache Tomcat. Available online: http://tomcat.apache.org/ (accessed on 29 April 2010).
- MySql. Available online: http://www.mysql.com/ (accessed on 29 April 2010).
- Akkermans, J.A.G.; van Beurden, M.C.; Doodeman, G.J.N.; Visser, H.J. Analytical models for low-power rectenna design. IEEE Ant. Wirel. Propag. Lett 2005, 4, 187–190. [Google Scholar]
- Yan, H.; Macías-Montero, J.G.; Akhnoukh, A.; de Vreede, L.C.N.; Burghartz, J.N. An Integration Scheme for RF Power Harvesting. Proceedings of the SAFE 2005 Conference, Utrecht, The Netherlands, June 13–15, 2005; pp. 64–66.
- Hudec, P.; Polivka, M.; Pechac, P. Microwave System for the Detection and Localization of Mobile Phones in Large Buildings. IEEE Trans. Microw. Theory Tech 2005, 53, 2235–2239. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Area of excessive speed (SSPEED) (km2/h) | Area of square of derivative of speed (SACCELERATION) (km/h2) | |
|---|---|---|
| Driver 1 | 3.9000 | 8.4526e + 04 |
| Driver 2 | 3.0952 | 5.2159e + 04 |
| Driver 3 | 3.7700 | 4.6422e + 04 |
| Driver 4 | 20.2868 | 3.1167e + 05 |
| Driver 5 | 9.3758 | 1.0029e + 05 |
| Driver 6 | 7.4486 | 1.7478e + 05 |
| Criterion | Variable | Comments |
|---|---|---|
| How much | km NK | Creation of a penalty system based on number of kilometres (NK) travelled by the vehicle within a set time period. |
| Where | Zones TZ1, TZ2 | Definition of various geographic zones, each of which is assigned a coefficient. Vehicle position data are acquired from the GPS. This example considers two zones: TZ1, TZ2. |
| When | Day/night TDAY, TNIGHT | Creation of two time bands (day/night), each of which is assigned an appropriate penalty. Chronological data are acquired from the GPS. |
| How | Respect for speed limits SSPEED | Estimated as the area between the horizontal line marking the legal speed limit and the extent by which this threshold is exceeded, thereby considering both the amount by which the speed limit is exceeded and the time for which this occurs. |
| Aggressive driving SACCELERATION | Analysis of variations in vehicle speed, considering as the variable the area of the vehicle’s acceleration curve. | |
| Number of vehicle passengers NOCCUPANTS | Average number of passengers per NK kilometres travelled. Estimated on the basis of the number of doors opened and the number of seatbelts fastened (data obtained from the EOBD system). | |
| Mobile telephone use TMOBILE | Amount of time the driver uses a mobile telephone whilst the vehicle is in motion. |
| Vehicle A | Vehicle B | |
|---|---|---|
| NK | 632 | 3712 |
| %TDAY, TNIGHT | 100.0 | 80.20 |
| %TZi: | 100.0 | 80.20 |
| NOCCUPANTS: | 2 | 1 |
| TMOBILE (MINUTES) | 0 | 57 |
| ASPEED | 377 | 2028 |
| SACCELERATION | 4.64e + 06 | 31,100,000 |
| ki | k1 = 1.00e-05 | k2 = 40 |
| k3 = 60 | k4 = 40 | |
| k5 = 60 | k6 = 1.2 | |
| k7 = 0.1 | k8 = 0.001 | |
| k9 = 0.000001 | ||
| Total premium | €47.20 | €130.67 |
© 2010 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Boquete, L.; Rodríguez-Ascariz, J.M.; Barea, R.; Cantos, J.; Miguel-Jiménez, J.M.; Ortega, S. Data Acquisition, Analysis and Transmission Platform for a Pay-As-You-Drive System. Sensors 2010, 10, 5395-5408. https://doi.org/10.3390/s100605395
Boquete L, Rodríguez-Ascariz JM, Barea R, Cantos J, Miguel-Jiménez JM, Ortega S. Data Acquisition, Analysis and Transmission Platform for a Pay-As-You-Drive System. Sensors. 2010; 10(6):5395-5408. https://doi.org/10.3390/s100605395
Chicago/Turabian StyleBoquete, Luciano, José Manuel Rodríguez-Ascariz, Rafael Barea, Joaquín Cantos, Juan Manuel Miguel-Jiménez, and Sergio Ortega. 2010. "Data Acquisition, Analysis and Transmission Platform for a Pay-As-You-Drive System" Sensors 10, no. 6: 5395-5408. https://doi.org/10.3390/s100605395
APA StyleBoquete, L., Rodríguez-Ascariz, J. M., Barea, R., Cantos, J., Miguel-Jiménez, J. M., & Ortega, S. (2010). Data Acquisition, Analysis and Transmission Platform for a Pay-As-You-Drive System. Sensors, 10(6), 5395-5408. https://doi.org/10.3390/s100605395