

Unrestricted Horizon Predictive Controller Applied in a Biphasic Oil Separator under Periodic Slug Disturbances

 , , ,
, , ,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Modelling of the Biphasic Oil Separator
2.2. The Unrestricted Horizon Predictive Controller
2.2.1. UHPC Equating
2.2.2. UHPC Design for the Biphasic Oil Separator Model
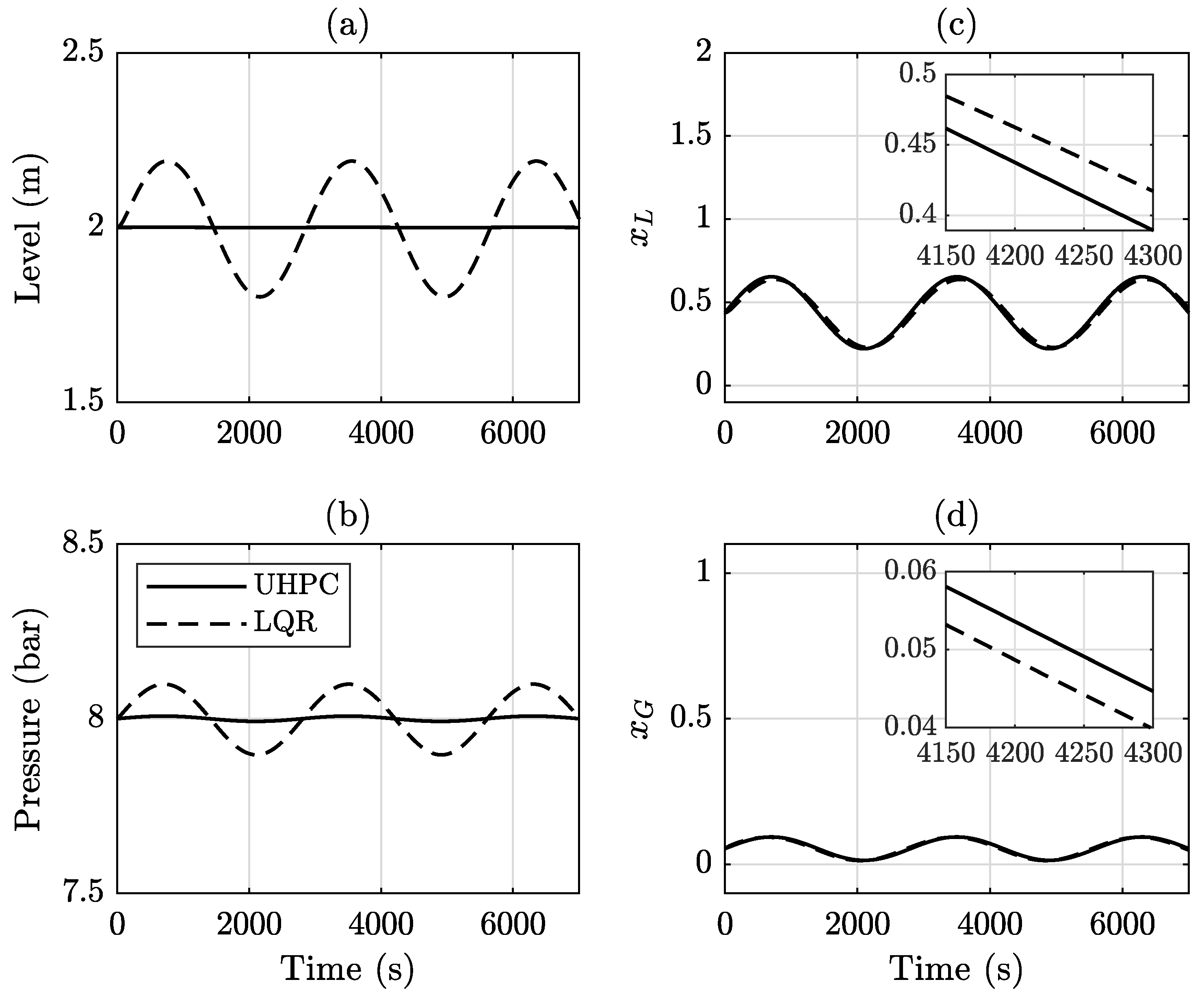
3. Results
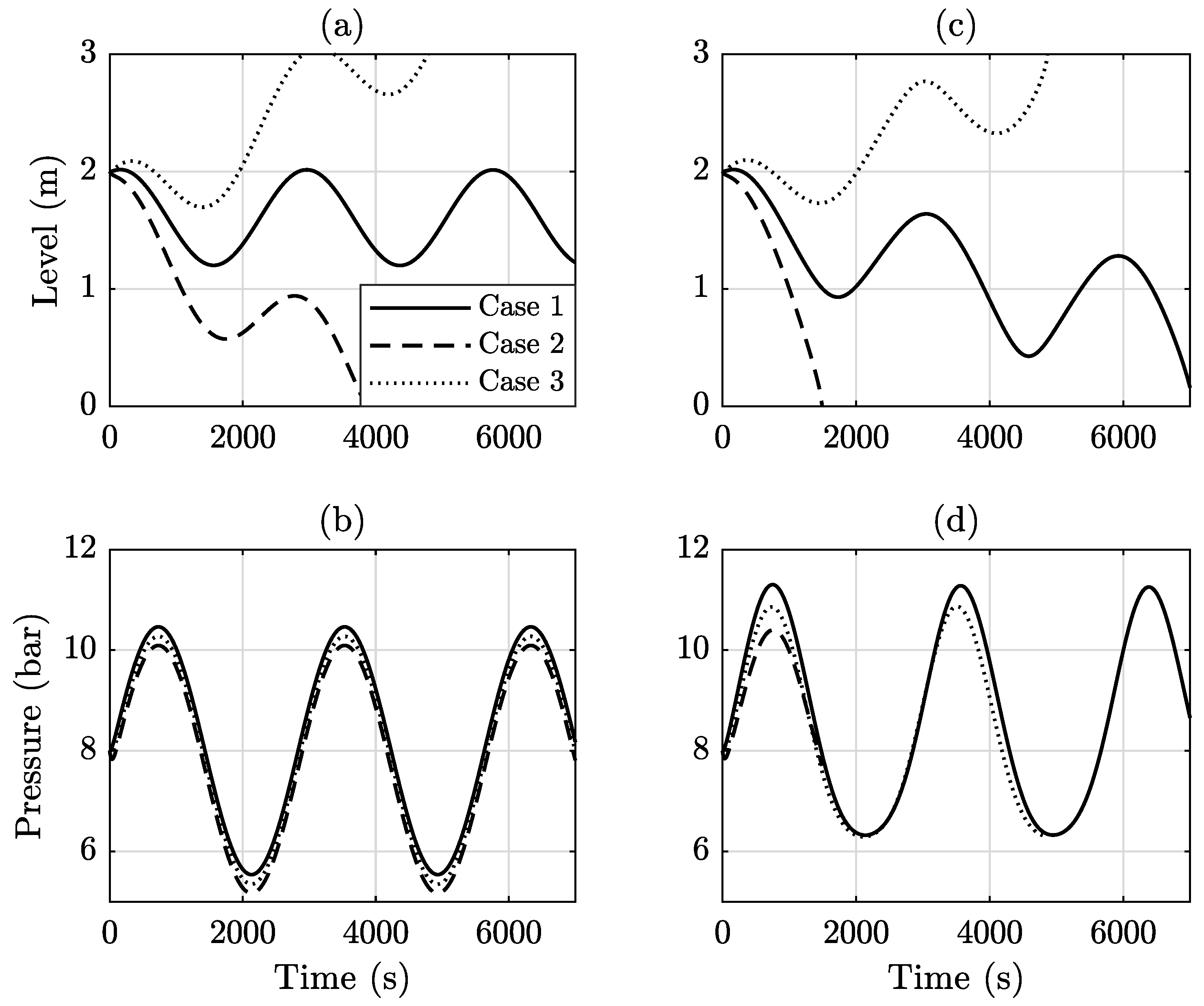
- Case 1:
- and (steady state values);
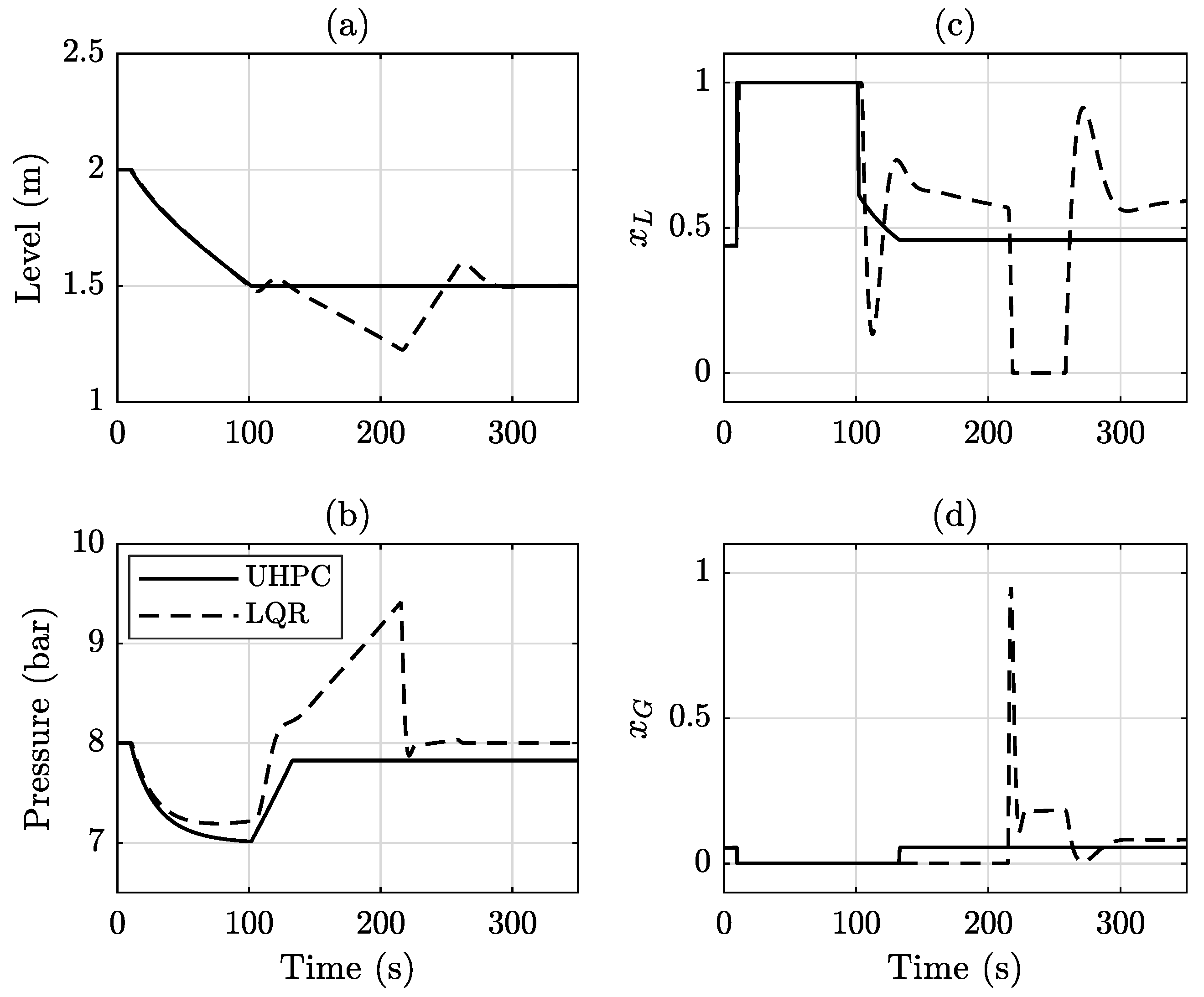
- Case 2:
- and (14% increase in liquid valve opening);
- Case 3:
- and (12% increase in gas valve opening).
4. Discussions and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Stewart, M.; Arnold, K. Gas-Liquid and Liquid-Liquid Separators; Gulf Professional Publishing: Houston, TX, USA, 2008. [Google Scholar]
- Bahadori, A. Natural Gas Processing; Gulf Professional Publishing: Boston, MA, USA, 2014; pp. 151–222. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, C.; Cai, J.; Lu, H.; Huang, L.; Yang, Q. Pilot application of a novel Gas–Liquid separator on offshore platforms. J. Pet. Sci. Eng. 2019, 180, 240–245. [Google Scholar] [CrossRef]
- Constant-Machado, H.; Leclerc, J.P.; Avilan, E.; Landaeta, G.; Añorga, N.; Capote, O. Flow modeling of a battery of industrial crude oil/gas separators using 113mIn tracer experiments. Chem. Eng. Process. Process Intensif. 2005, 44, 760–765. [Google Scholar] [CrossRef]
- Acharya, T.; Casimiro, L. Evaluation of flow characteristics in an onshore horizontal separator using computational fluid dynamics. J. Ocean. Eng. Sci. 2020, 5, 261–268. [Google Scholar] [CrossRef]
- Ayala, H.L.F.; Alp, D.; Al-Timimy, M. Intelligent design and selection of natural gas two-phase separators. J. Nat. Gas Sci. Eng. 2009, 1, 84–94. [Google Scholar] [CrossRef]
- Mostafaiyan, M.; Saeb, M.R.; Alorizi, A.E.; Farahani, M. Application of evolutionary computational approach in design of horizontal three-phase gravity separators. J. Pet. Sci. Eng. 2014, 119, 28–35. [Google Scholar] [CrossRef]
- Grødal, E.O.; Realff, M.J. Optimal design of two-and three-phase separators: A mathematical programming formulation. In Proceedings of the SPE Annual Technical Conference and Exhibition, Society of Petroleum Engineers, Huston, TX, USA, 3–6 October 1999. [Google Scholar]
- Song, J.; Hu, X.; Zhang, J.; Chen, J. Experimental study on performance of two types of corrugated plate gas-liquid separators. Energy Procedia 2017, 142, 3282–3286. [Google Scholar] [CrossRef]
- Skjefstad, H.S.; Stanko, M. Experimental performance evaluation and design optimization of a horizontal multi-pipe separator for subsea oil-water bulk separation. J. Pet. Sci. Eng. 2019, 176, 203–219. [Google Scholar] [CrossRef]
- Hreiz, R. On the effect of the nozzle design on the performances of gas–liquid cylindrical cyclone separators. Int. J. Multiph. Flow 2014, 58, 15–26. [Google Scholar] [CrossRef]
- Ahmed, T.; Russell, P.A.; Makwashi, N.; Hamad, F.; Gooneratne, S. Design and capital cost optimisation of three-phase gravity separators. Heliyon 2020, 6, e04065. [Google Scholar] [CrossRef]
- Pedersen, S.; Durdevic, P.; Yang, Z. Challenges in slug modeling and control for offshore oil and gas productions: A review study. Int. J. Multiph. Flow 2017, 88, 270–284. [Google Scholar] [CrossRef]
- Sausen, A.; Sausen, P.; Campos, M. Chapter 5—The Slug Flow Problem in Oil Industry and Pi Level Control. In New Technologies in the Oil and Gas Industry; Gomes, J.S., Ed.; IntechOpen: London, UK, 2012; pp. 103–116. [Google Scholar] [CrossRef]
- Cozin, C.; Vicencio, F.E.C.; de Almeida Barbuto, F.A.; Morales, R.E.M.; da Silva, M.J.; Arruda, L.V.R. Two-Phase Slug Flow Characterization Using Artificial Neural Networks. IEEE Trans. Instrum. Meas. 2016, 65, 494–501. [Google Scholar] [CrossRef]
- Dong, X.; Tan, C.; Dong, F. Gas–Liquid Two-Phase Flow Velocity Measurement With Continuous Wave Ultrasonic Doppler and Conductance Sensor. IEEE Trans. Instrum. Meas. 2017, 66, 3064–3076. [Google Scholar] [CrossRef]
- Zhao, Z.; Shi, B. Numerical simulation of oil-water separation process in disc separator. In Proceedings of the 2011 International Conference on Remote Sensing, Environment and Transportation Engineering, Nanjing, China, 24–26 June 2011; pp. 8369–8372. [Google Scholar] [CrossRef]
- Nemoto, R.H.; Baliño, J.L. Modeling and simulation of severe slugging with mass transfer effects. Int. J. Multiph. Flow 2012, 40, 144–157. [Google Scholar] [CrossRef]
- Backi, C.J.; Krishnamoorthy, D.; Skogestad, S. Slug handling with a virtual harp based on nonlinear predictive control for a gravity separator. IFAC-PapersOnLine 2018, 51, 120–125. [Google Scholar] [CrossRef]
- Hernandez-Perez, V.; Abdulkadir, M.; Azzopardi, B.J. Slugging Frequency Correlation for Inclined Gas-liquid Flow. Int. J. Chem. Mol. Eng. 2010, 4, 10–17. [Google Scholar]
- Liu, W.; Han, Y.; Wang, D.; Zhao, A.; Jin, N. The Slug and Churn Turbulence Characteristics of Oil–Gas–Water Flows in a Vertical Small Pipe. Z. FüR Naturforschung 2017, 72, 817–831. [Google Scholar] [CrossRef]
- Godhavn, J.M.; Fard, M.P.; Fuchs, P.H. New slug control strategies, tuning rules and experimental results. J. Process Control 2005, 15, 547–557. [Google Scholar] [CrossRef]
- Mokhatab, S.; Poe, W.A.; Mak, J.Y. Handbook of Natural Gas Transmission and Processing, 4th ed.; Gulf Professional Publishing: Huston, TX, USA, 2019; pp. 103–176. [Google Scholar] [CrossRef]
- Havre, K.; Dalsmo, M. Active Feedback Control as a Solution to Severe Slugging. Spe Prod. Facil. 2002, 17, 138–148. [Google Scholar] [CrossRef] [Green Version]
- Pinto, D.D.D.; Araújo, O.Q.; de Medeiros, J.L.; Nunes, G.C. Slug Control Structures for Mitigation of Disturbances to Offshore Units. In 10th International Symposium on Process Systems Engineering: Part A; Elsevier: Amsterdam, The Netherlands, 2009; Volume 27, pp. 1305–1310. [Google Scholar] [CrossRef]
- Nunes, G.C.; Coelho, A.A.R.; Sumar, R.R.; Mejía, R.I.G. Band Control: Concepts and Application in Dampening oscillations of Feed of Petroleum Production Units. IFAC Proc. Vol. 2005, 38, 123–128. [Google Scholar] [CrossRef] [Green Version]
- Nunes, G.C. Design and Analysis of Multivariable Predictive Control Applied to an Oil-Water-Gas Separator: A Polynomial Approach; University of Florida: Gainesville, FL, USA, 2001. [Google Scholar]
- Minghui, W.; Gensheng, L. Wellbore Temperature Prediction and Control Through State Space Model. In Proceedings of the SPE Kingdom of Saudi Arabia Annual Technical Symposium and Exhibition, OnePetro, Dammam, Saudi Arabia, 25–28 April 2016. [Google Scholar]
- Liu, X.; Liu, Z.; Wang, X.; Zhang, N.; Qiu, N.; Chang, Y.; Chen, G. Recoil control of deepwater drilling riser system based on optimal control theory. Ocean. Eng. 2021, 220, 108473. [Google Scholar] [CrossRef]
- Veremey, E.I. Optimal damping stabilisation based on LQR synthesis. Int. J. Syst. Sci. 2020, 52, 1359–1372. [Google Scholar] [CrossRef]
- Shim, K.H.; Sawan, M.E. Linear quadratic regulator design for singularly perturbed systems by unified approach using d operators. Int. J. Syst. Sci. 2001, 32, 1119–1125. [Google Scholar] [CrossRef]
- Lincoln, B.; Bernhardsson, B. LQR optimization of linear system switching. IEEE Trans. Autom. Control 2002, 47, 1701–1705. [Google Scholar] [CrossRef]
- Patarroyo-Montenegro, J.F.; Andrade, F.; Guerrero, J.M.; Vasquez, J.C. A Linear Quadratic Regulator With Optimal Reference Tracking for Three-Phase Inverter-Based Islanded Microgrids. IEEE Trans. Power Electron. 2021, 36, 7112. [Google Scholar] [CrossRef]
- Rossiter, J.A. Model-Based Predictive Control: A Practical Approach; CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar]
- Stokke, S.; Strand, S.; Sjong, D. Model predictive control (MPC) of a gas-oil-water separator train. In Methods of Model Based Process Control; Springer: Berlin/Heidelberg, Germany, 1995; pp. 701–713. [Google Scholar]
- Mendes, P.; Normey-Rico, J.E.; Plucenio, A.; Carvalho, R. Disturbance estimator based nonlinear MPC of a three phase separator. IFAC Proc. Vol. 2012, 45, 101–106. [Google Scholar] [CrossRef] [Green Version]
- Hansen, L.; Durdevic, P.; Jepsen, K.L.; Yang, Z. Plant-wide optimal control of an offshore de-oiling process using mpc technique. IFAC-PapersOnLine 2018, 51, 144–150. [Google Scholar] [CrossRef]
- Jespersen, S.; Yang, Z. Performance Evaluation of a De-oiling Process Controlled by PID, H∞ and MPC. In Proceedings of the IECON 2021—47th Annual Conference of the IEEE Industrial Electronics Society, Toronto, ON, Canada, 13–16 October 2021. [Google Scholar]
- Bitmead, R.R.; Gevers, M.; Wertz, V. Adaptive Optimal Control—The Thinking Man’s GPC; Prentice Hall: Hoboken, NJ, USA, 1990. [Google Scholar]
- Clarke, D.; Mohtadi, C.; Tuffs, P. Generalized predictive controller—Part I: The basic algorithm. Automatica 1987, 23, 137–148. [Google Scholar] [CrossRef]
- Ribeiro, C.; Miyoshi, S.; Secchi, A.; Bhaya, A. Model Predictive Control with quality requirements on petroleum production platforms. J. Pet. Sci. Eng. 2016, 137, 10–21. [Google Scholar] [CrossRef]
- Neto, S.S.; Secchi, A. Nonlinear Model Predictive Controller Applied to an Offshore Oil and Gas Production Facility. In Proceedings of the OTC Brasil, OnePetro, Rio de Janeiro, Brasil, 24–26 October 2017. [Google Scholar]
- Campos, M.C.M.M.; Ribeiro, L.D.; Diehl, F.C.; Moreira, C.A.; Bombardelli, D.; Carelli, A.C.; Junior, G.M.J.; Pinto, S.F.; Quaresma, B. Intelligent System for Start-Up and Anti-Slug Control of a Petroleum Offshore Platform. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 1–4 May 2017. [Google Scholar] [CrossRef]
- Willersrud, A.; Imsland, L.; Hauger, S.O.; Kittilsen, P. Short-term production optimization of offshore oil and gas production using nonlinear model predictive control. J. Process Control 2013, 23, 215–223. [Google Scholar] [CrossRef] [Green Version]
- Richalet, J.; Rault, A.; Testud, J.; Papon, J. Model predictive heuristic control: Applications to industrial processes. Automatica 1978, 14, 413–428. [Google Scholar] [CrossRef]
- Trentini, R.; Silveira, A.; Kutzner, R.; Hofmann, L. On the unrestricted horizon predictive control—A fully stochastic model-based predictive approach. In Proceedings of the 2016 European Control Conference (ECC) IEEE, Aalborg, Denmark, 29 June–1 July 2016; pp. 1322–1327. [Google Scholar]
- Trentini, R. Contributions to the Damping of Interarea Modes in Extended Power Systems: A Turbine Governor Approach with the Help of the Unrestricted Horizon Predictive Controller. Ph.D. Thesis, Gottfried Wilhelm Leibniz Universität, Hannover, Germany, 2017. [Google Scholar]
- De Lima, J.C., Jr.; Trentini, R.; Prioste, F. Comparative study of the pitch control of a wind turbine using Linear Quadratic Gaussian and the Unrestricted Horizon Predictive Controller. Int. Trans. Electr. Energy Syst. 2021, 31, e12720. [Google Scholar]
- De Castro, L.A.; Silveira, A.d.S.; Araújo, R.d.B. Unrestricted horizon predictive control applied to a nonlinear SISO system. Int. J. Dyn. Control 2022, 11, 286–300. [Google Scholar] [CrossRef]
- Yan, K.; Che, D. Hydrodynamic and mass transfer characteristics of slug flow in a vertical pipe with and without dispersed small bubbles. Int. J. Multiph. Flow 2011, 37, 299–325. [Google Scholar] [CrossRef]
- Nunes, G.C.; de Medeiros, J.L.; Araújo, O.; de Queiroz Fernandes, O. Modelagem e Controle da Produçao de Petróleo: Aplicaçoes em Matlab; Editora Blucher: São Paulo, Brazil, 2010. [Google Scholar]
- Perry, R.H.; Green, D.W. Perry’s Chemical Engineer’s Handbook, 6th ed.; McGraw-Hill Book Co.: New York, NY, USA, 1985. [Google Scholar]
- Silveira, A.S.; Coelho, A.A. Generalised minimum variance control state-space design. IET Control Theory Appl. 2011, 5, 1709–1715. [Google Scholar] [CrossRef]
- Berkovitz, L.D. Optimal Control Theory; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2013; Volume 12. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description | Value | Unity |
|---|---|---|---|
| Liquid valve flow coefficient | 1025 | gpm/psi | |
| Gas valve flow coefficient | 120 | gpm/psi | |
| Liquid density | 850 | kg/m | |
| Water density | 999.19 | kg/m | |
| Valves downstream pressure | 6 | bar | |
| T | Separator internal temperature | 303.15 | K |
| Air molar mass | 0.039 | kg/mol | |
| Gas molar mass | 0.021 | kg/mol | |
| D | Separator diameter | 3 | m |
| C | Separator length | 8 | m |
| V | Separator volume | 56.55 | m |
| Symbol | Description | Value | Unity |
|---|---|---|---|
| Liquid valve opening | 0.4375 | 1 | |
| Gas valve opening | 0.0536 | 1 | |
| Liquid flow inlet | 0.165 | m/s | |
| Liquid flow outlet | 0.165 | m/s | |
| Gas flow inlet | 0.1 | m/s | |
| Gas flow outlet | 0.1 | m/s | |
| Internal liquid level | 2 | m | |
| Internal pressure | 8 | bar | |
| Volume of liquid | 40.05 | m |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Trentini, R.; Campos, A.; Salvador, M.A.; Scheuer, Y.M.; dos Santos, C.H.F. Unrestricted Horizon Predictive Controller Applied in a Biphasic Oil Separator under Periodic Slug Disturbances. Processes 2023, 11, 928. https://doi.org/10.3390/pr11030928
Trentini R, Campos A, Salvador MA, Scheuer YM, dos Santos CHF. Unrestricted Horizon Predictive Controller Applied in a Biphasic Oil Separator under Periodic Slug Disturbances. Processes. 2023; 11(3):928. https://doi.org/10.3390/pr11030928
Chicago/Turabian StyleTrentini, Rodrigo, Alexandre Campos, Marcos Antonio Salvador, Yuri Matheus Scheuer, and Carlos Henrique Farias dos Santos. 2023. "Unrestricted Horizon Predictive Controller Applied in a Biphasic Oil Separator under Periodic Slug Disturbances" Processes 11, no. 3: 928. https://doi.org/10.3390/pr11030928