Sensor-Based Trajectory Generation for Advanced Driver Assistance System



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
1.1. Sensing
1.2. Trajectory Generation and Assistance
1.3. Proposed Solution and Main Contributions
2. Related Works
3. Algorithm
3.1. Problem Definition
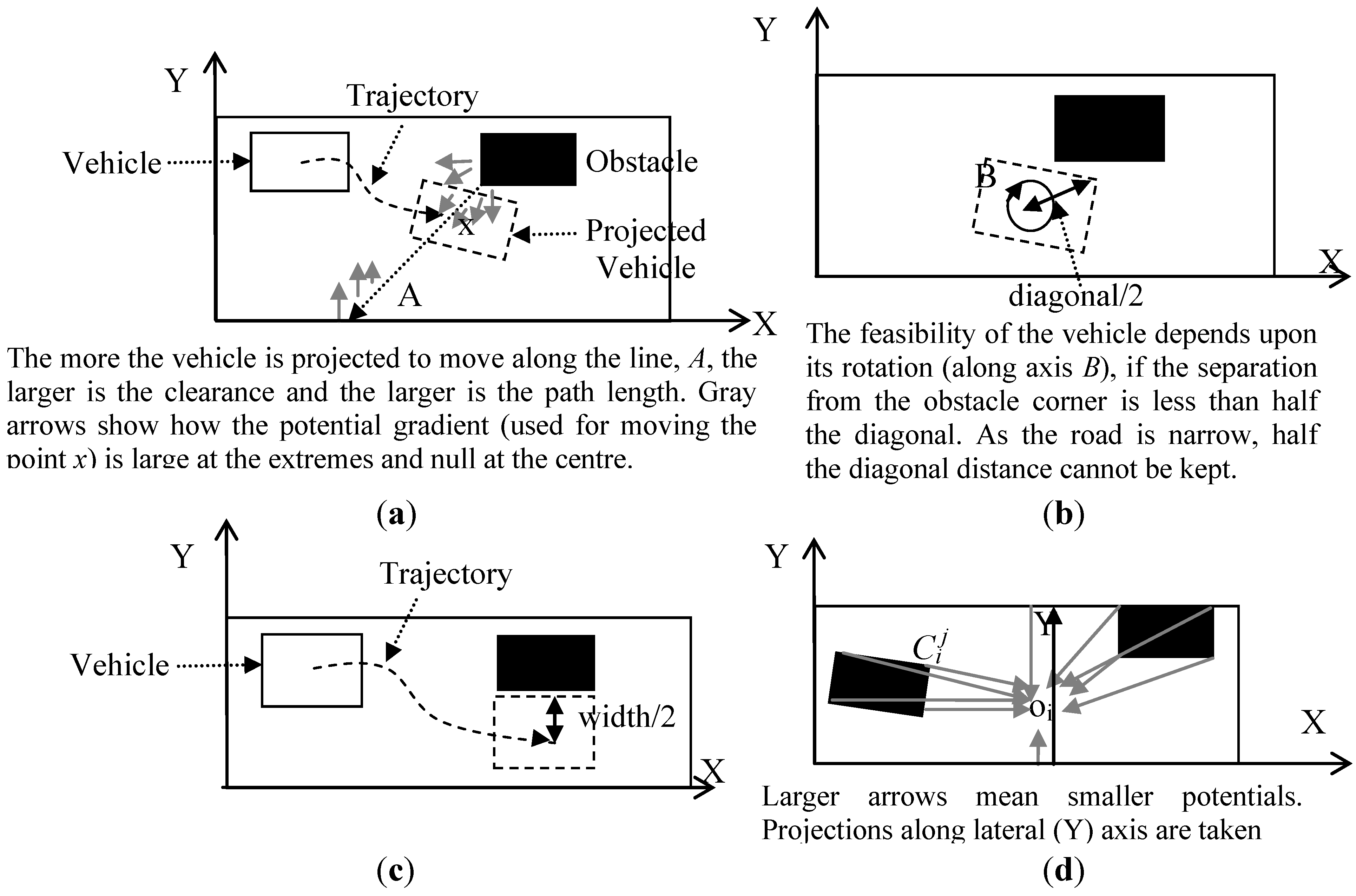
 , is short in length (minimize ||τ||), has a high average clearance (maximize ||C(τ)||) and has a high smoothness (or low curvature) at the steepest turn (minimizemax(κ(τ))). Here, ξfree denotes the obstacle free configuration space, which considers all the other obstacles as static, ||.|| denotes the Euclidian norm, C denotes the clearance and κ denotes the curvature.
, is short in length (minimize ||τ||), has a high average clearance (maximize ||C(τ)||) and has a high smoothness (or low curvature) at the steepest turn (minimizemax(κ(τ))). Here, ξfree denotes the obstacle free configuration space, which considers all the other obstacles as static, ||.|| denotes the Euclidian norm, C denotes the clearance and κ denotes the curvature. 
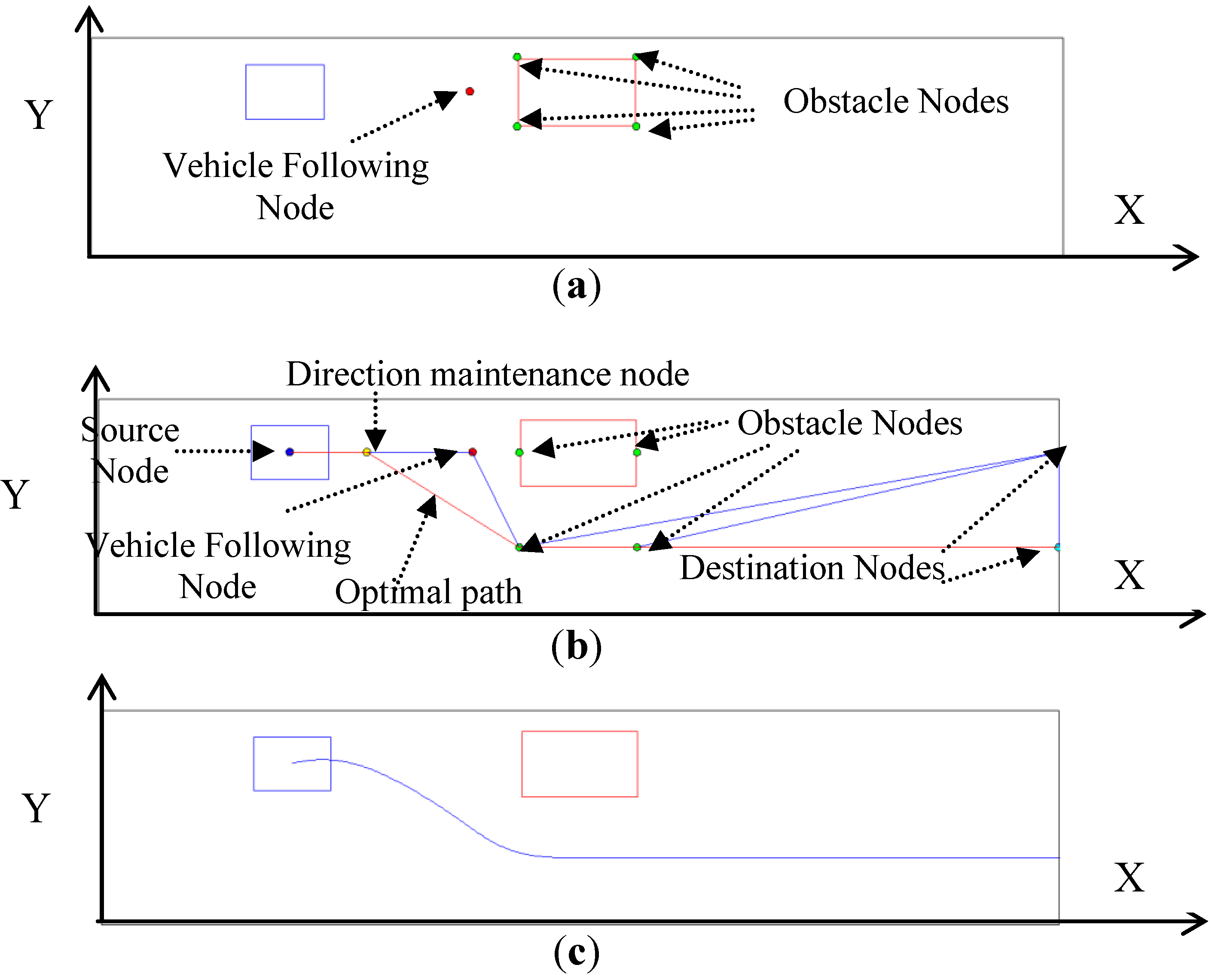
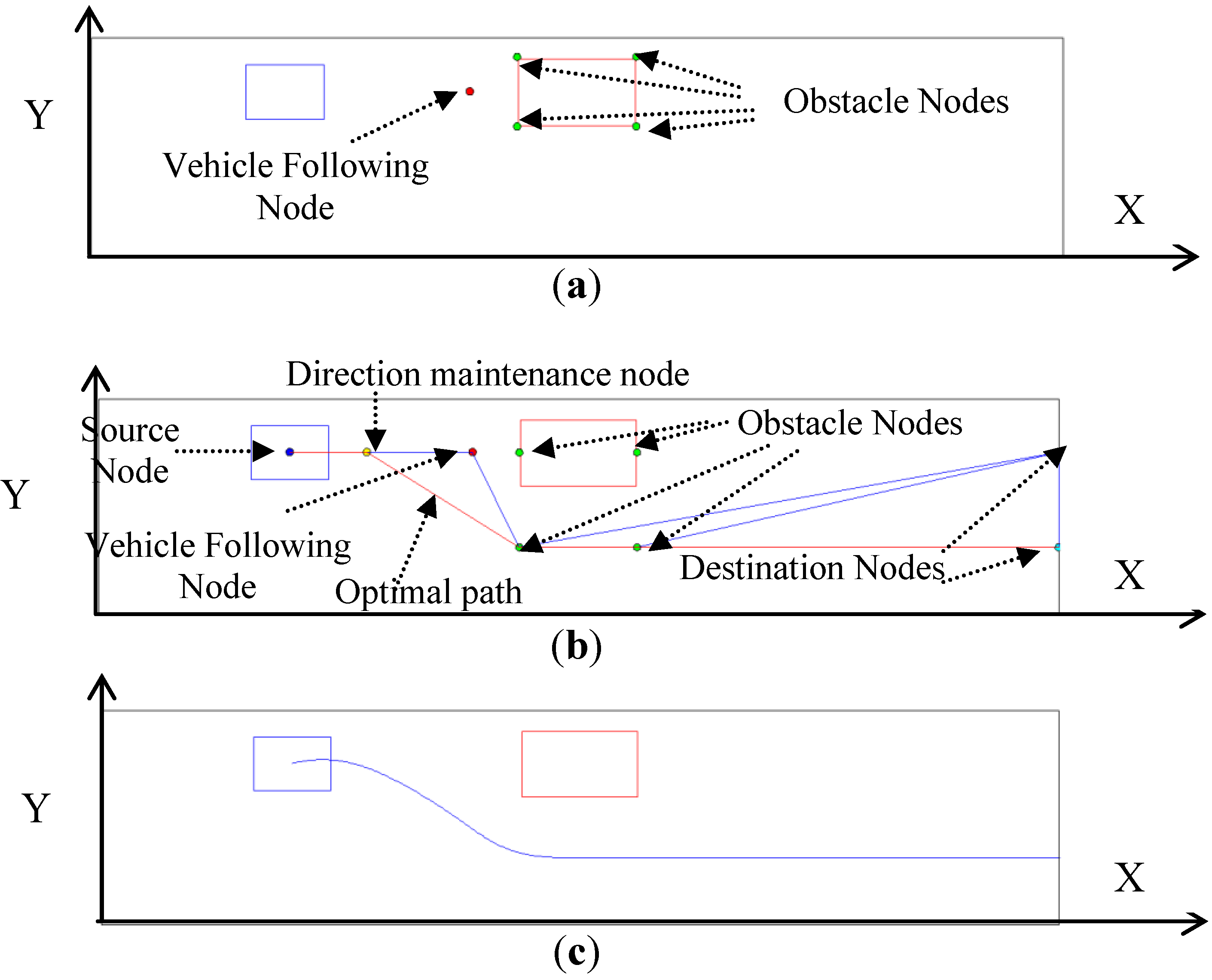
3.2. Initializing Visibility Graph
 ,
,  ,
,  and
and  . The obstacle nodes are placed just outside the obstacle, given by Equation (1), where
. The obstacle nodes are placed just outside the obstacle, given by Equation (1), where  is a small vector pointing radially outwards from the corner, Cij. Here, i covers vehicles, while j covers the corners of the ith vehicle:
is a small vector pointing radially outwards from the corner, Cij. Here, i covers vehicles, while j covers the corners of the ith vehicle:

 be the corner of the vehicle at pi, which has the least longitudinal occupancy (most behind longitudinally, along the X axis, the length of the road). For the node to be admissible, it is necessary that it lies longitudinally ahead of the vehicle’s current longitudinal occupancy and, subsequently, further by a distance, so as to allow a turn (currently equal to the vehicles length). The longitudinal position of the node is taken at a distance q behind . These nodes may hence be given by Equation (2). Throughout the paper, for a point P(x,y), P[X] refers to the X axis component (x) and P[Y] refers to the Y axis component (y).
be the corner of the vehicle at pi, which has the least longitudinal occupancy (most behind longitudinally, along the X axis, the length of the road). For the node to be admissible, it is necessary that it lies longitudinally ahead of the vehicle’s current longitudinal occupancy and, subsequently, further by a distance, so as to allow a turn (currently equal to the vehicles length). The longitudinal position of the node is taken at a distance q behind . These nodes may hence be given by Equation (2). Throughout the paper, for a point P(x,y), P[X] refers to the X axis component (x) and P[Y] refers to the Y axis component (y).

3.3. Applying Lateral Potentials
 , each of which repels the node by a magnitude inversely proportional to the square of the distance. The road boundaries also act as obstacles and repel the node. The repulsion is, however, proportional to the shortest distance between the vehicle and the road boundaries. The resultant potential is given by Equation (3).
, each of which repels the node by a magnitude inversely proportional to the square of the distance. The road boundaries also act as obstacles and repel the node. The repulsion is, however, proportional to the shortest distance between the vehicle and the road boundaries. The resultant potential is given by Equation (3).
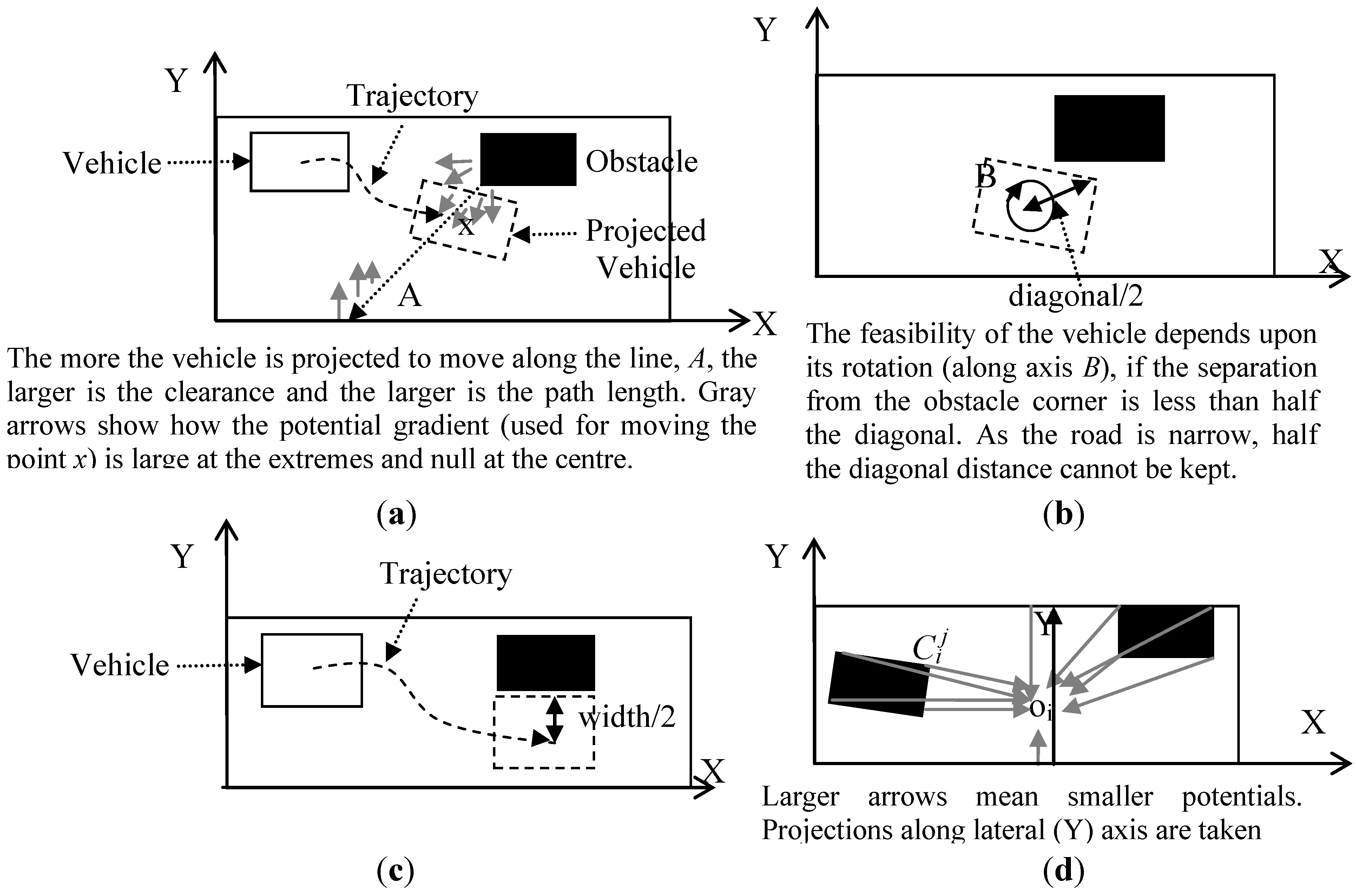
 is the unit vector in the direction to oi, and the projection of the resultant potential in the Y axis is considered. M is the road width. The sources of potential are explained in Figure 2(d).
is the unit vector in the direction to oi, and the projection of the resultant potential in the Y axis is considered. M is the road width. The sources of potential are explained in Figure 2(d). 
 is the obstacle node after the application of the lateral potential:
is the obstacle node after the application of the lateral potential:

3.4. Graph Search
3.5. Trajectory Control
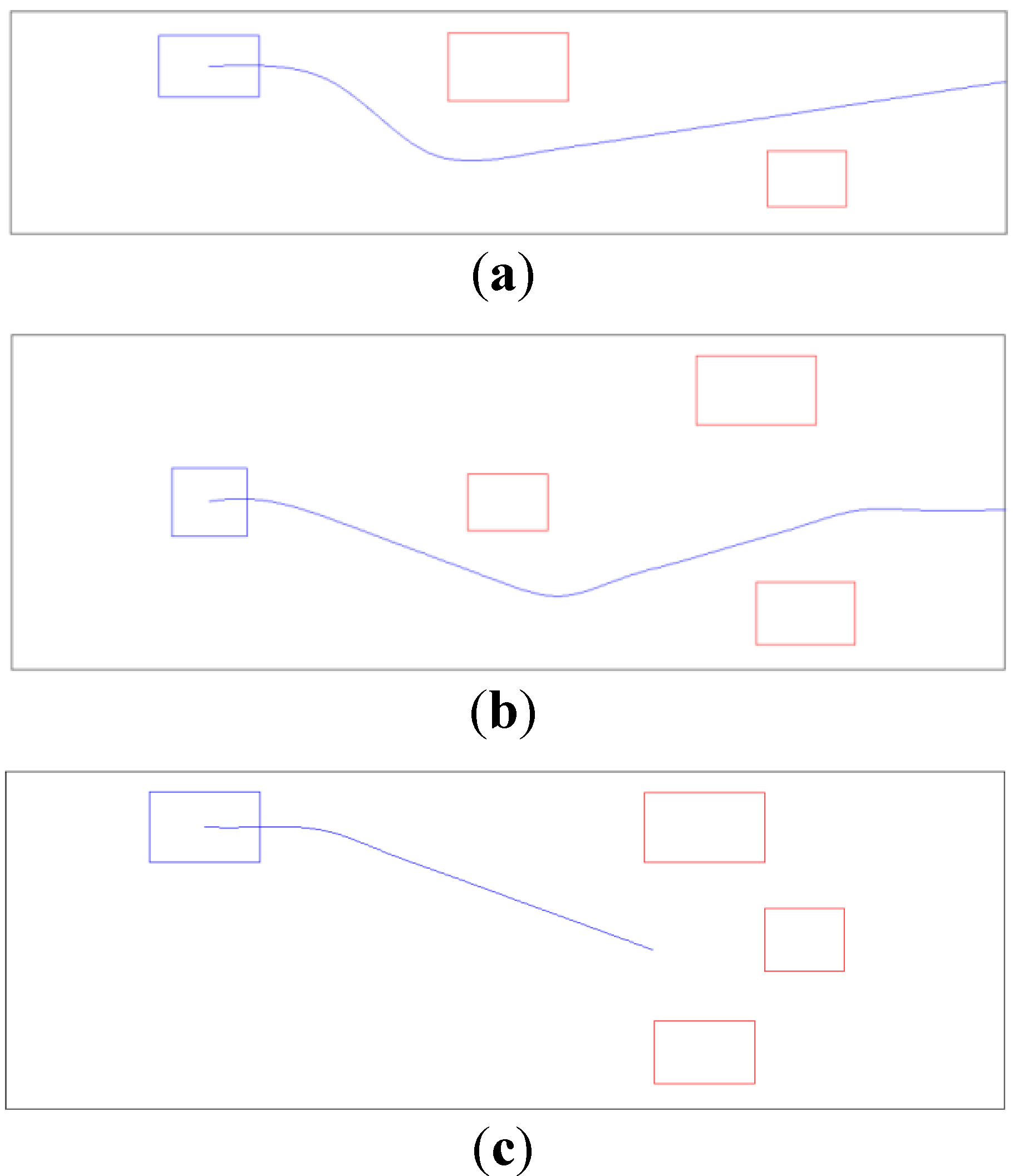
4. Results
5. Conclusions
Acknowledgments
References
- Hummel, T.; Kühn, M.; Bende, J.; Lang, A. Advanced Driver Assistance Systems: An Investigation of Their Potential Safety Benefits Based on an Analysis of Insurance Claims In Germany; Research report FS 03; German Insurance Association (GDV): Berlin, Germany, 2011. [Google Scholar]
- Gerónimo, D.; López, A.M.; Sappa, A.D.; Graf, T. Survey of pedestrian detection for advanced driver assistance systems. IEEE Trans. Pattern Anal. Mach. Intell. 2010, 32, 1239–1258. [Google Scholar] [CrossRef]
- Sarshar, M. A Novel System for Advanced Driver Assistance Systems. In Proceedings of the 4th Annual IEEE Systems Conference, San Diego, CA, USA, April 2010; pp. 529–534.
- Trivedi, M.M.; Cheng, S.Y. Holistic sensing and active displays for intelligent driver support systems. Computer 2007, 40, 60–68. [Google Scholar] [CrossRef]
- Trivedi, M.M.; Gandhi, T.; McCall, J. Looking-in and looking-out of a vehicle: Computer-vision-based enhanced vehicle safety. IEEE Trans. Intell. Transport. Syst. 2007, 8, 108–120. [Google Scholar] [CrossRef]
- Cellario, M. Human-centered intelligent vehicles: Toward multimodal interface integration. IEEE Intell. Syst. 2001, 16, 78–81. [Google Scholar] [CrossRef]
- Hannan, M.A.; Hussain, A.; Samad, S.A. Sensing systems and algorithms for airbag deployment decision. Sensors 2011, 11, 888–890. [Google Scholar]
- Parasuraman, R.; Hancock, P.A.; Olofinboba, O. Alarm effectiveness in driver-centred collision-warning systems. Ergonomics 1997, 40, 390–399. [Google Scholar] [CrossRef]
- Stein, G.P.; Mano, O.; Shashua, A. Vision-Based ACC with a Single Camera: Bounds on Range and Range Rate Accuracy. In Proceedings of the IEEE Intelligent Vehicles Symposium, Columbus, OH, USA, 9–11 June 2003; pp. 120–125.
- Schlegl, T.; Bretterklieber, T.; Neumayer, M.; Zangl, H. Combined capacitive and ultrasonic distance measurement for automotive applications. Sensors 2011, 11, 2636–2642. [Google Scholar] [CrossRef]
- Dams, M.; Winner, H. A Modular System Architecture for Sensor Data Processing of ADAS Applications. In Proceedings of the IEEE Intelligent Vehicles Symposium, Las Vegas, NV, USA, 6–8 June 2005; pp. 729–734.
- Tsugawa, S. Inter-Vehicle Communications and Their Applications to Intelligent Vehicles: An Overview. In Proceedings of the IEEE Intelligent Vehicle Symposium, Versailles, France, 17–21 June 2002; pp. 564–569.
- Reichardt, D.; Miglietta, M.; Moretti, L.; Morsink, P.; Schulz, W. CarTALK 2000: Safe and Comfortable Driving Based upon Inter-Vehicle-Communication. In Proceedings of the IEEE Intelligent Vehicle Symposium, Versailles, France, 17–21 June 2002; pp. 545–550.
- Khatib, O. Real-Time Obstacle Avoidance for Manipulators and Mobile Robots. In Proceedings of the 1985 IEEE International Conference on Robotics and Automation, St. Louis, MO, USA, March 1985; pp. 500–505.
- Stentz, A. Optimal and Efficient Path Planning for Partially-Known Environments. In Proceedings of the 1994 IEEE International Conference on Robotics and Automation, San Diego, CA, USA, 8–13 May 1994; pp. 3310–3317.
- Choset, H.; Burdick, J. Sensor Based Planning. I. The Generalized Voronoi Graph. In Proceedings of the 1995 IEEE International Conference on Robotics and Automation, Nagoya, Japan, 21–27 May 1995; pp. 1649–1655.
- Fiorini, P.; Shiller, Z. Motion Planning in Dynamic Environments Using Velocity Obstacles. Int. J. Roboti. Res. 1998, 17, 760–772. [Google Scholar] [CrossRef]
- Wesley, M.A.; Lozano-Pérez, T. An algorithm for planning collision-free paths among polyhedral obstacles. Comm. ACM 1979, 22, 560–570. [Google Scholar] [CrossRef]
- Oommen, B.; Iyengar, S.; Rao, N.; Kashyap, R. Robot navigation in unknown terrains using learned visibility graphs. Part I: The disjoint convex obstacle case. IEEE J. Robot. Autom. 1987, 3, 672–681. [Google Scholar] [CrossRef]
- Keller, C.G.; Dang, T.; Fritz, H.; Joos, A.; Rabe, C.; Gavrila, D.M. Active pedestrian safety by automatic braking and evasive steering. IEEE Trans. Intell. Transport. Syst. 2011, 12, 1292–1304. [Google Scholar] [CrossRef]
- Jensen, M.J.; Tolbert, A.M.; Wagner, J.R.; Member, S.; Switzer, F.S.; Finn, J.W. A customizable automotive steering system with a Haptic feedback control strategy for obstacle avoidance notification. IEEE Trans. Veh. Tech. 2011, 60, 4208–4216. [Google Scholar] [CrossRef]
- Mulder, M.; Abbink, D.A.; van Paassen, M.M.; Mulder, M. Design of a Haptic gas pedal for active car-following support. IEEE Trans. Intell. Transport. Syst. 2011, 12, 268–279. [Google Scholar] [CrossRef]
- Kavraki, L.E.; Kolountzakis, M.N.; Latombe, J.C. Analysis of probabilistic roadmaps for path planning. IEEE Trans. Robot. Autom. 1998, 14, 166–171. [Google Scholar] [CrossRef]
- Kavraki, L.E.; Svestka, P.; Latombe, J.C.; Overmars, M.H. Probabilistic roadmaps for path planning in highdimensional configuration spaces. IEEE Trans. Robot. Autom. 1996, 12, 566–580. [Google Scholar] [CrossRef]
- Gayle, R.; Sud, A.; Lin, M.C.; Manocha, D. Reactive Deformation Roadmaps: Motion Planning of Multiple Robots in Dynamic Environments. In Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Diego, CA, USA, 29 October–2 November 2007; pp. 3777–3783.
- Quinlan, S.; Khatib, O. Elastic Bands: Connecting Path Planning and Control. In Proceedings of the 1993 IEEE International Conference on Robotics and Automation, Atlanta, GA, USA, 2–6 May 1993; pp. 802–807.
- Anderson, S.J.; Karumanchi, S.B.; Iagnemma, K. Constraint-Based Planning and Control for Safe, Semi-Autonomous Operation of Vehicles. In Proceedings of the 2012 IEEE Intelligent Vehicles Symposium, Madrid, Spain, 3–7 June 2012; pp. 383–388.
- Kala, R.; Warwick, K. Multi-vehicle planning using RRT-connect. Paladyn J. Behav. Robot. 2012, 2, 134–144. [Google Scholar] [CrossRef]
- Kala, R.; Warwick, K. Planning of Multiple Autonomous Vehicles Using RRT. In Proceedings of the 10th IEEE International Conference on Cybernetic Intelligent Systems, London, UK, September 2011; pp. 20–25.
- Kuwata, Y.; Karaman, S.; Teo, J.; Frazzoli, E.; How, J.P.; Fiore, G. Real-time motion planning with applications to autonomous urban driving. IEEE Trans. Contr. Syst. Tech. 2009, 17, 1105–1118. [Google Scholar] [CrossRef]
- Schubert, R.; Schulze, K.; Wanielik, G. Situation assessment for automatic lane-change maneuvers. IEEE Trans. Intell. Transport. Syst. 2010, 11, 607–616. [Google Scholar] [CrossRef]
- Hegeman, G.; Tapani, A.; Hoogendoorn, S. Overtaking assistant assessment using traffic simulation. Transport. Res. C 2009, 17, 617–630. [Google Scholar] [CrossRef]
- Naranjo, J.E.; González, C.; García, R.; de Pedro, T. Lane-change fuzzy control in autonomous vehicles for the overtaking maneuver. IEEE Trans. Intell. Transport. Syst. 2008, 9, 438–450. [Google Scholar] [CrossRef] [Green Version]
- Gayle, R.; Moss, W.; Lin, M.C.; Manocha, D. Multi-Robot Coordination Using Generalized Social Potential Fields. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 106–113.
- Gayle, R.; Manocha, D. Navigating Virtual Agents in Online Virtual Worlds. In Proceedings of the 13th International Symposium on 3D Web Technology, Los Angeles, CA, USA, April 2008; ACM: New York, NY, USA; pp. 53–56.
- Kala, R.; Shukla, A.; Tiwari, R. Robotic path planning in static environment using hierarchical multi-neuron heuristic search and probability based fitness. Neurocomputing 2011, 74, 2314–2335. [Google Scholar] [CrossRef]
- Kala, R.; Warwick, K. Multi-level planning for semi-autonomous vehicles in traffic scenarios based on separation maximization. J. Intell. Robotic Syst. 2013. [Google Scholar] [CrossRef]
- Cagigas, D.; Abascal, J. A hierarchical extension of the D* algorithm. J. Intell. Robotic Syst. 2005, 42, 393–413. [Google Scholar] [CrossRef]
- Kala, R.; Warwick, K. Motion planning of autonomous vehicles in a non-autonomous vehicle environment without speed lanes. Eng. Appl. Artif. Intell. 2013. [Google Scholar] [CrossRef]
© 2013 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Shackleton, C.J.; Kala, R.; Warwick, K. Sensor-Based Trajectory Generation for Advanced Driver Assistance System. Robotics 2013, 2, 19-35. https://doi.org/10.3390/robotics2010019
Shackleton CJ, Kala R, Warwick K. Sensor-Based Trajectory Generation for Advanced Driver Assistance System. Robotics. 2013; 2(1):19-35. https://doi.org/10.3390/robotics2010019
Chicago/Turabian StyleShackleton, Christopher James, Rahul Kala, and Kevin Warwick. 2013. "Sensor-Based Trajectory Generation for Advanced Driver Assistance System" Robotics 2, no. 1: 19-35. https://doi.org/10.3390/robotics2010019
APA StyleShackleton, C. J., Kala, R., & Warwick, K. (2013). Sensor-Based Trajectory Generation for Advanced Driver Assistance System. Robotics, 2(1), 19-35. https://doi.org/10.3390/robotics2010019