Ant Robotic Swarm for Visualizing Invisible Hazardous Substances



Abstract
:1. Introduction
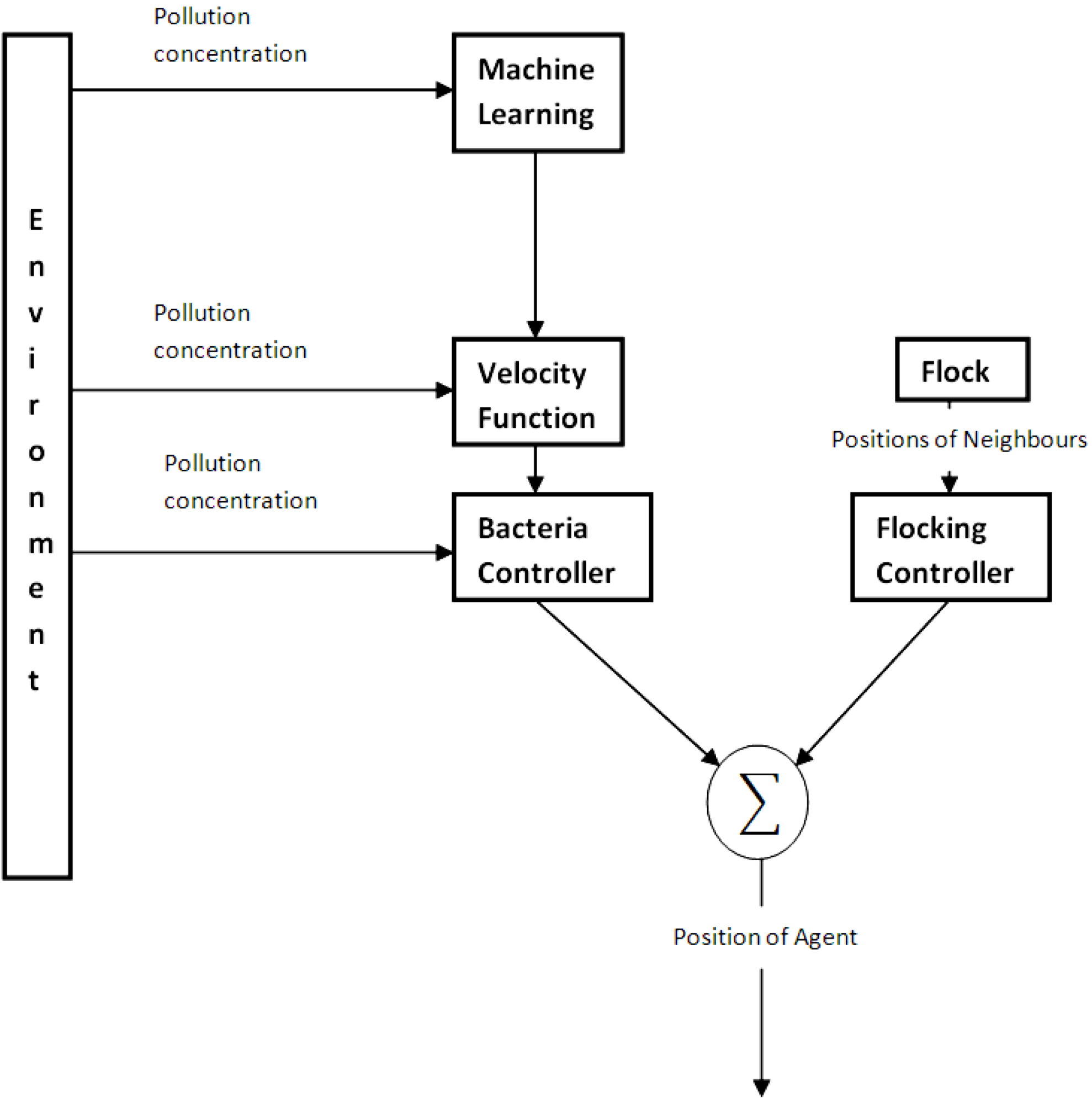
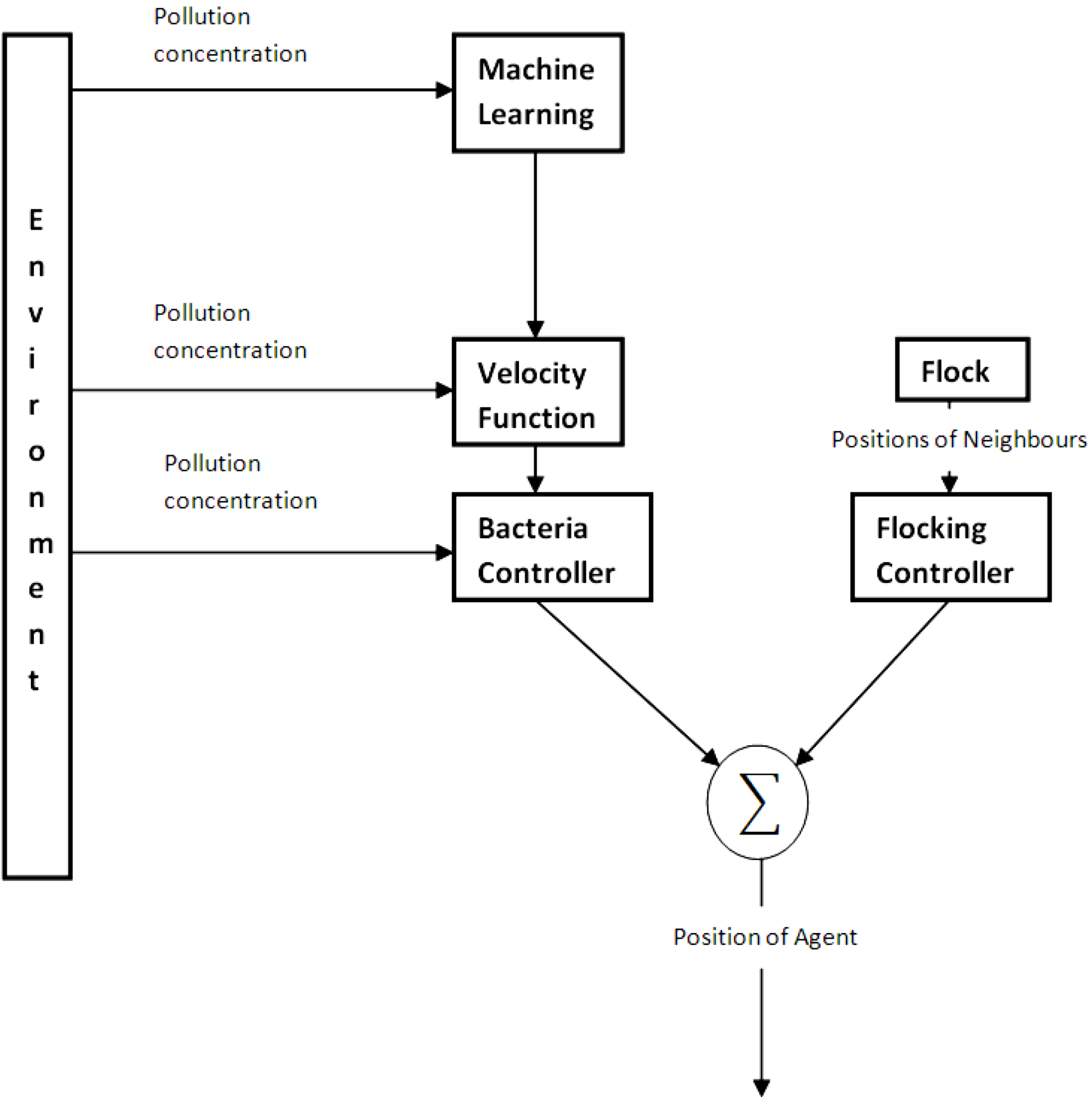
2. Technical Approach
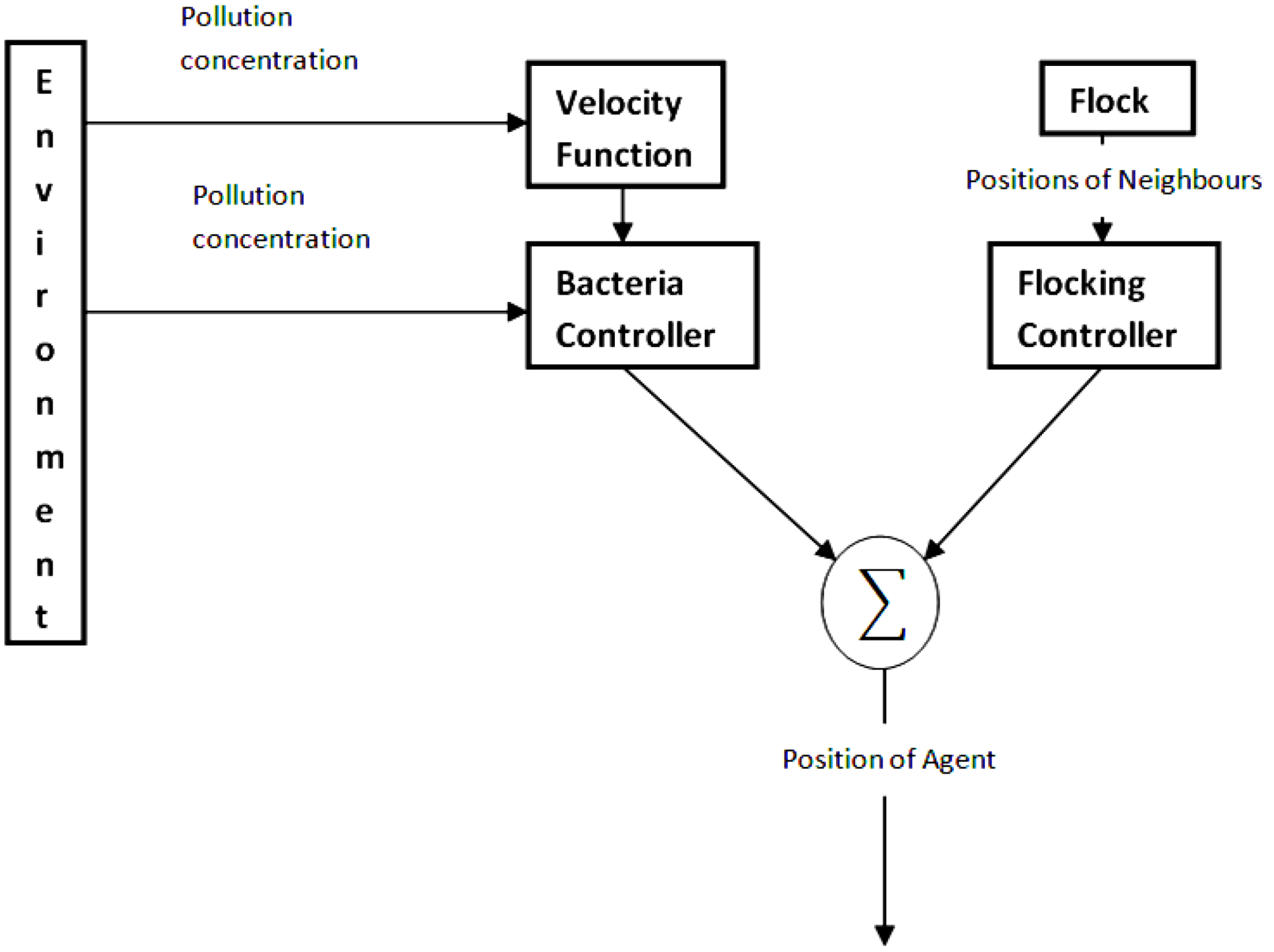
2.1. Bacteria Controller

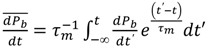
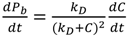
 is the rate of change of Pb.
is the rate of change of Pb.  is the weighted rate of change of Pb, while τm is the time constant of the bacterial system.
is the weighted rate of change of Pb, while τm is the time constant of the bacterial system. 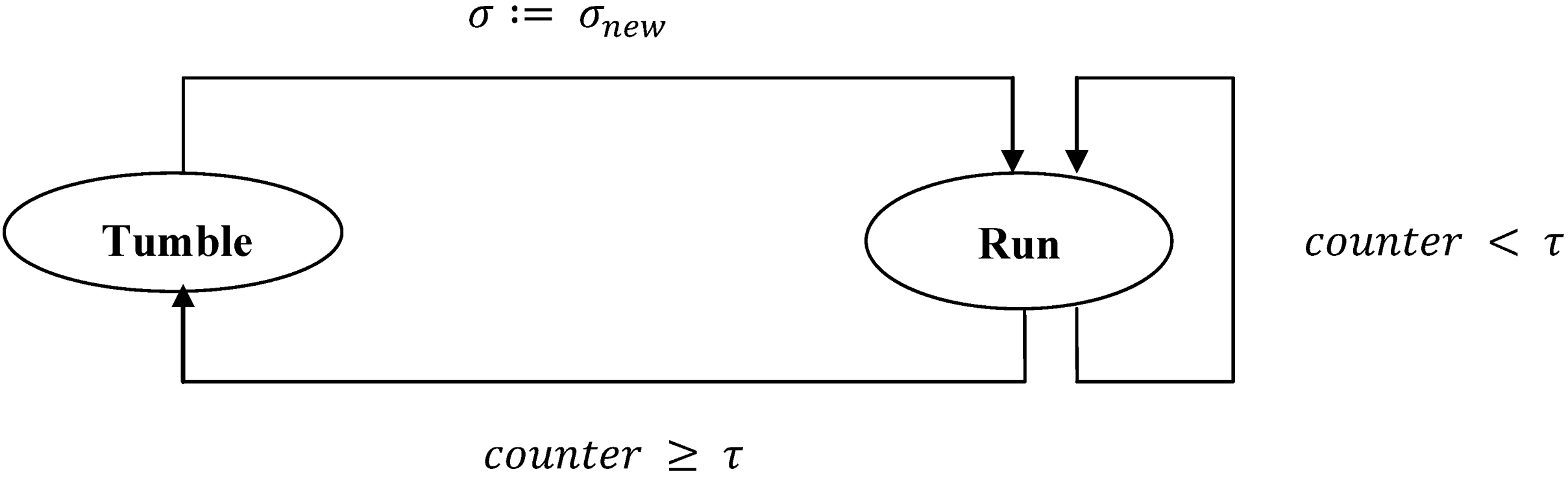
2.2. Flocking Controller

 represents the repulsion function and GA is the attractive function. Following this, we use exponential functions, as in Equation (5), to achieve flocking. This results in the Morse potential as in Equation (5) [41].
represents the repulsion function and GA is the attractive function. Following this, we use exponential functions, as in Equation (5), to achieve flocking. This results in the Morse potential as in Equation (5) [41].


2.3. Velocity Controller


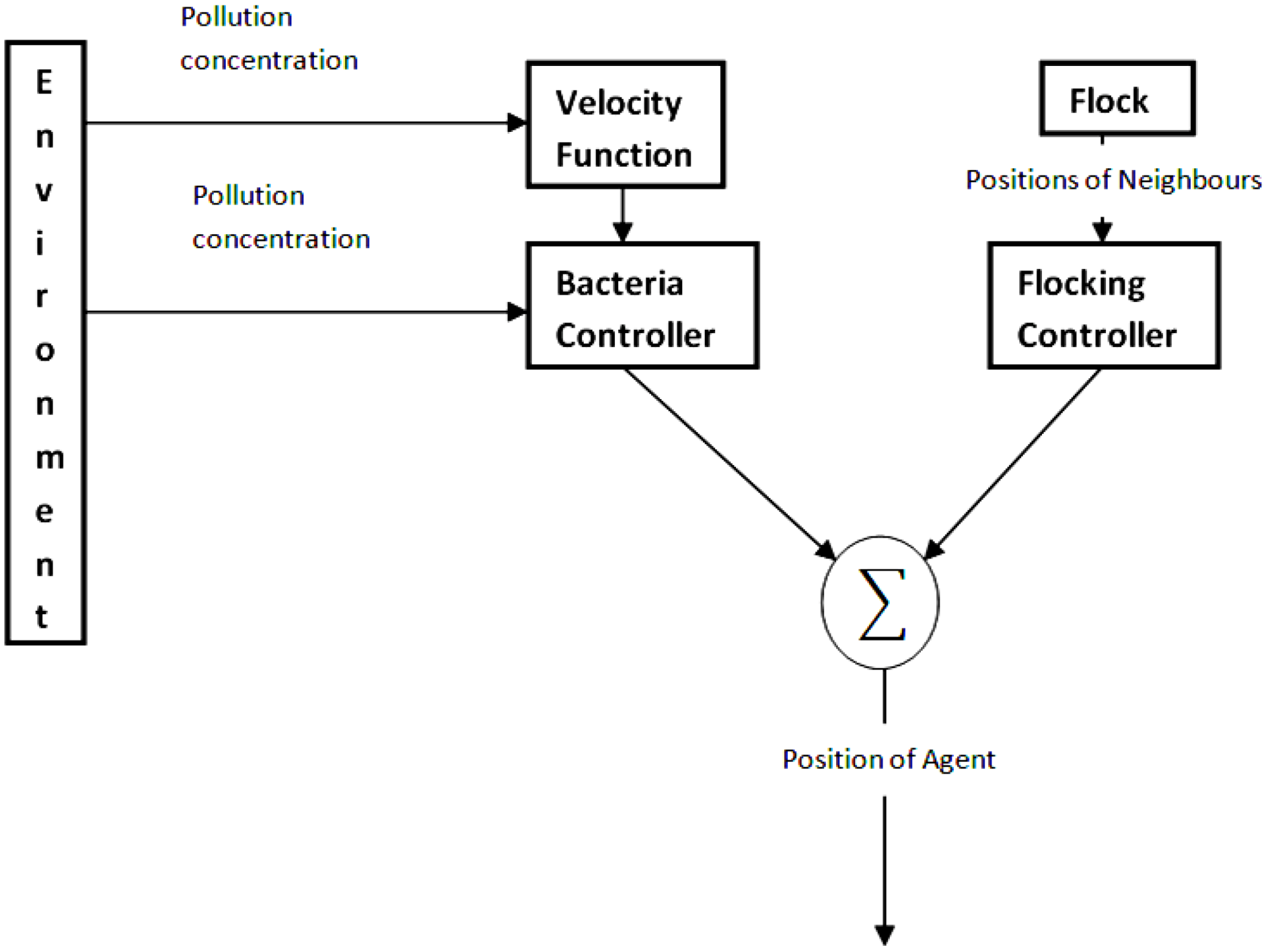

 is the standard velocity without any reading. This velocity function was embedded in the bacteria controller. The present reading Ci(t) of the agent adapts the velocity of the agent so that in an area of higher concentration, it moves slowly covering a smaller area and vice versa. How this achieves coverage can be explained using
is the standard velocity without any reading. This velocity function was embedded in the bacteria controller. The present reading Ci(t) of the agent adapts the velocity of the agent so that in an area of higher concentration, it moves slowly covering a smaller area and vice versa. How this achieves coverage can be explained using




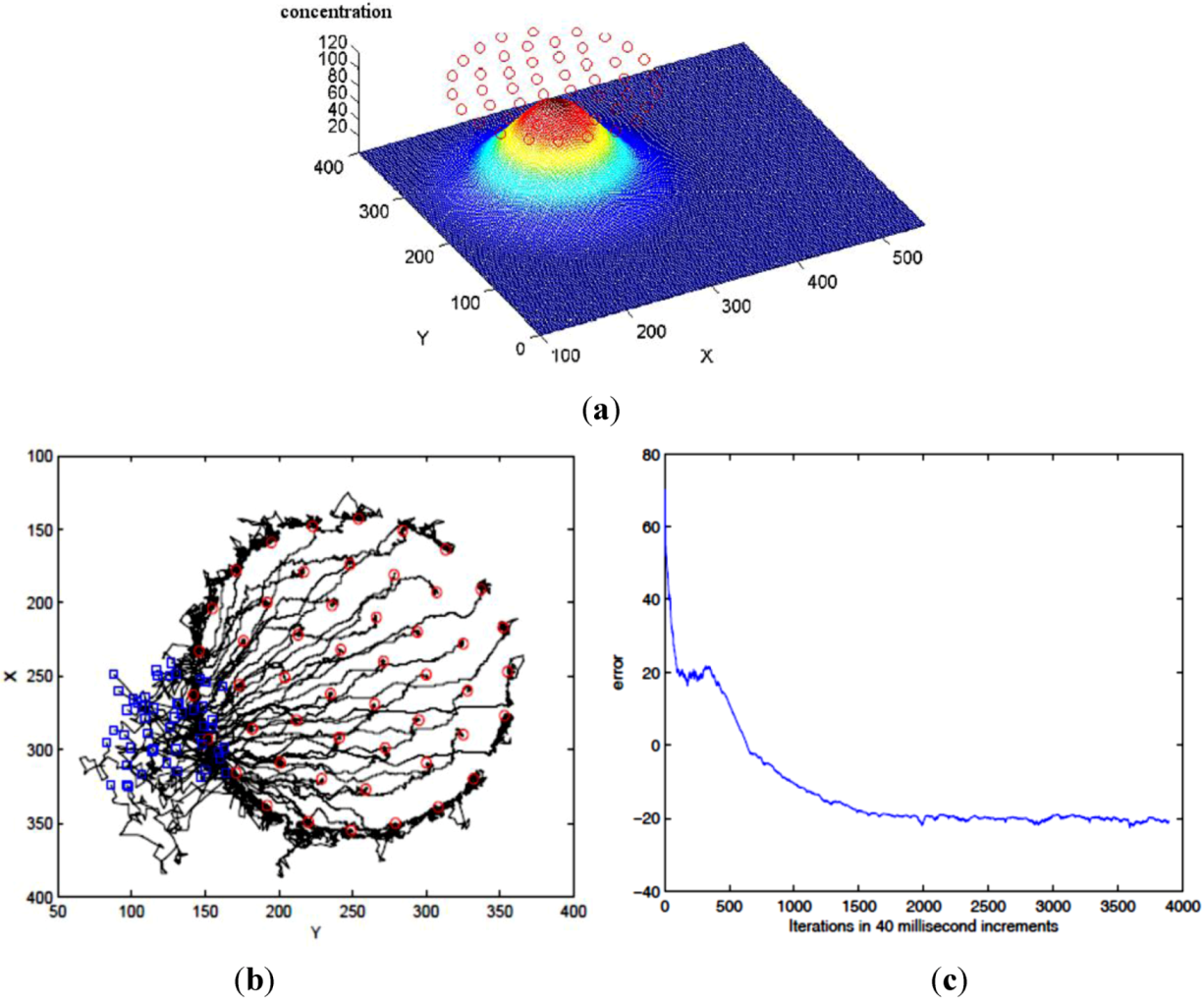
 is a proportional gain. A Gaussian model based Genetic algorithm explained in Section 3 was used to estimate parameters of the pollutant profile F(S(x)) locally. The standard deviation parameters of the locally estimated Gaussian are then used in Equation (12) so that it becomes
is a proportional gain. A Gaussian model based Genetic algorithm explained in Section 3 was used to estimate parameters of the pollutant profile F(S(x)) locally. The standard deviation parameters of the locally estimated Gaussian are then used in Equation (12) so that it becomes

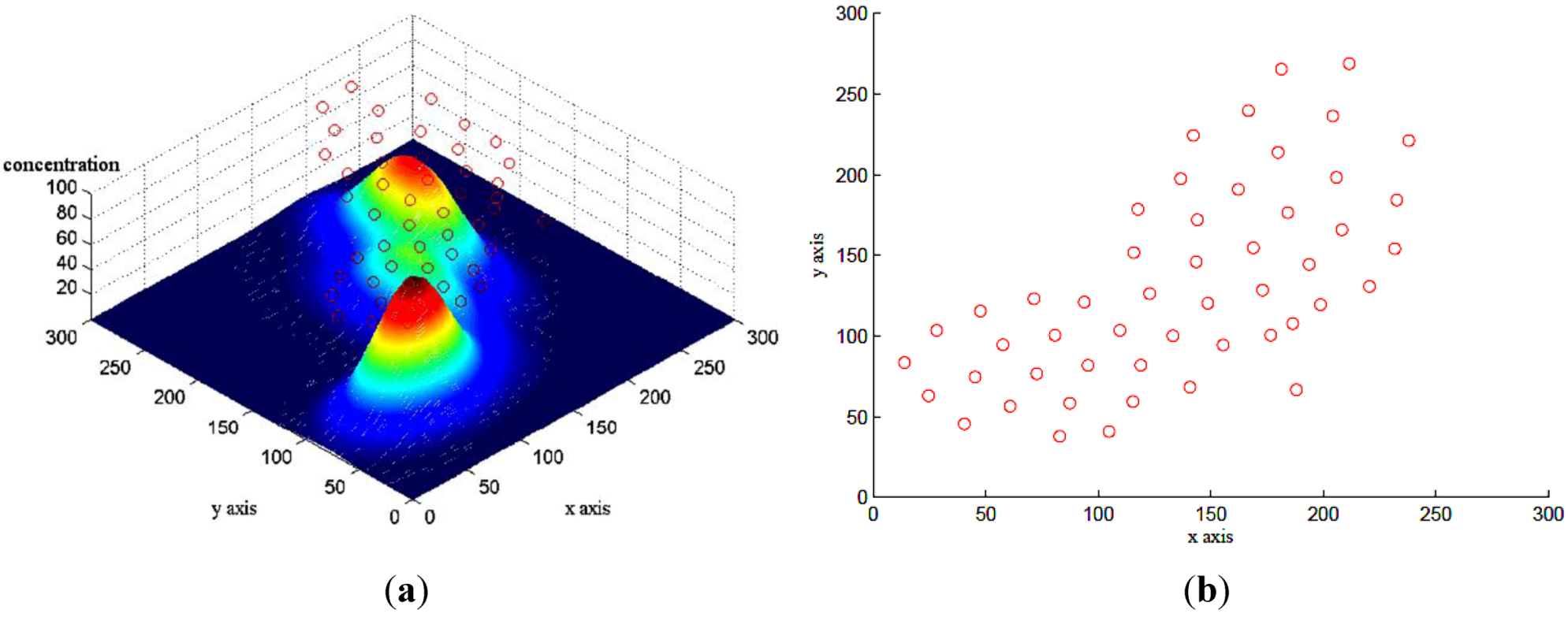
3. Pollution Distribution Estimation Using Genetic Algorithm


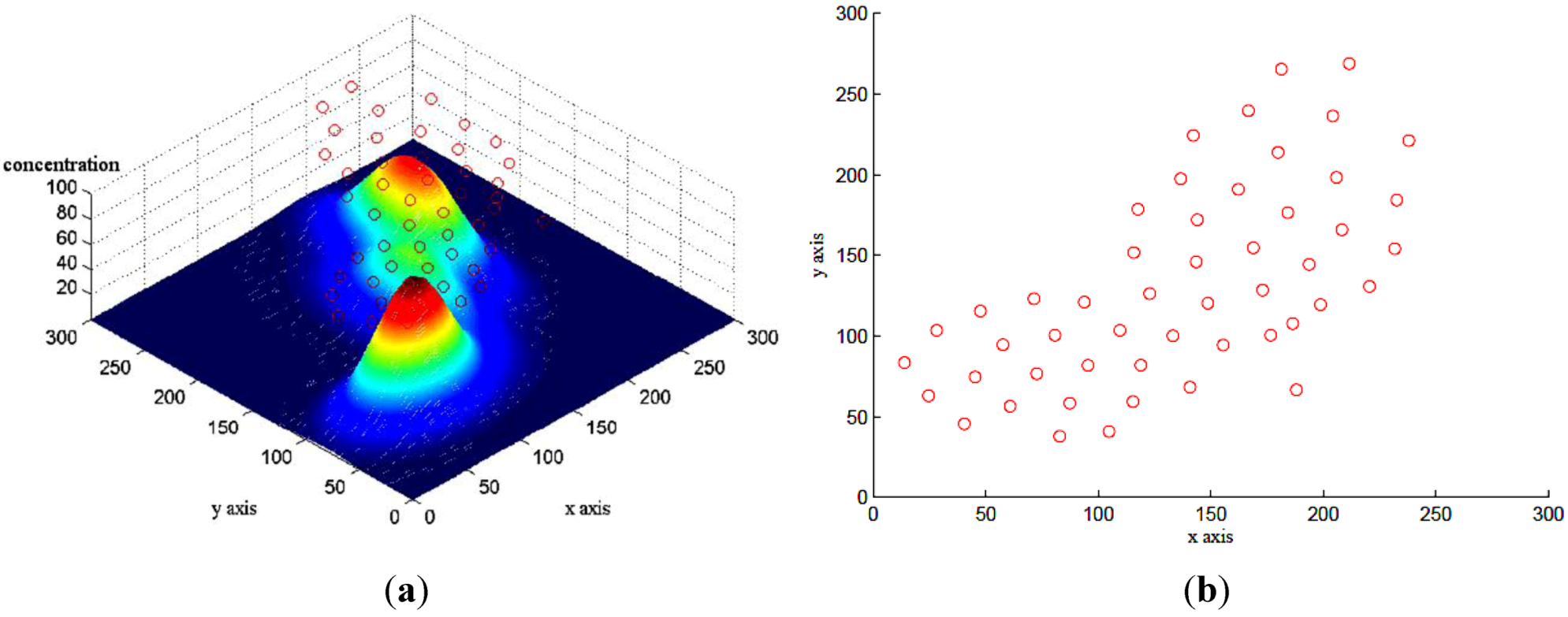
3.1. Estimating Simple Gaussian Functions
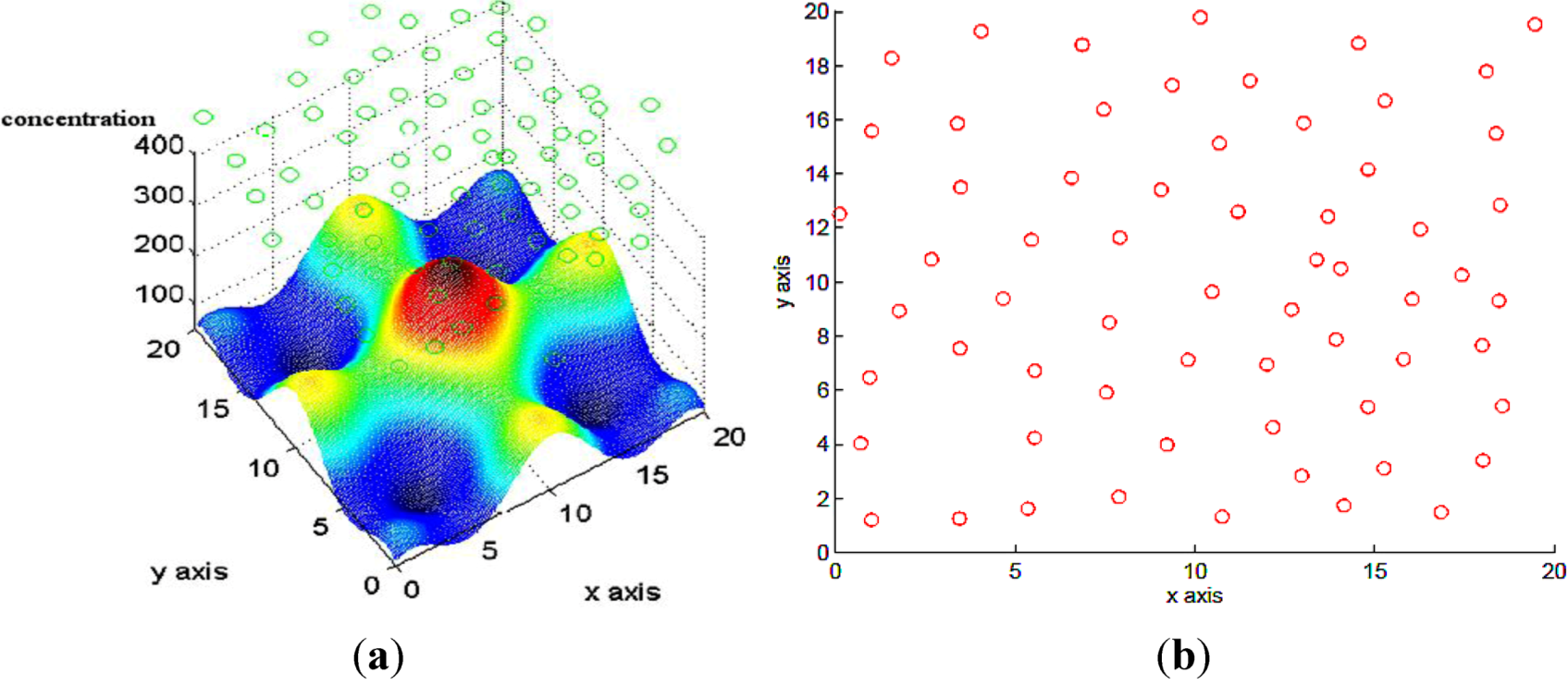
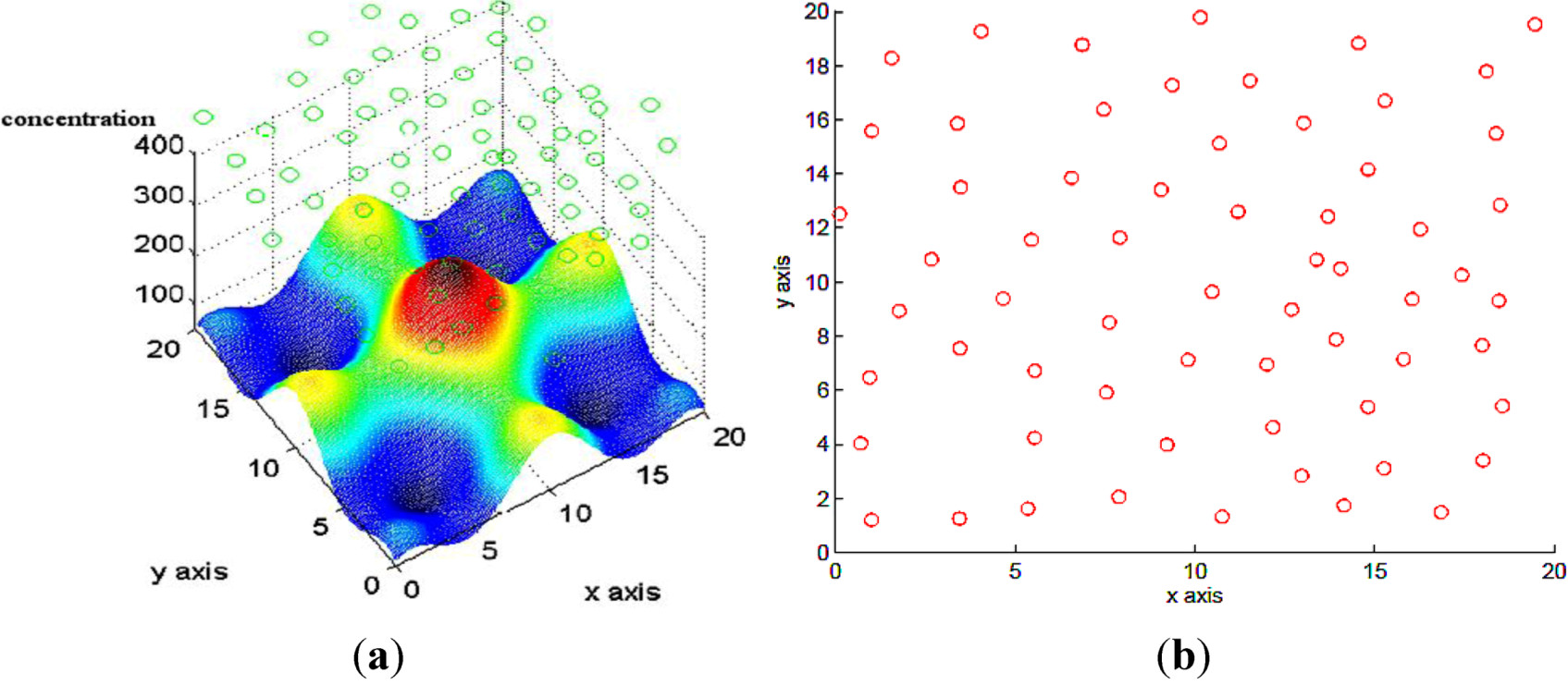
3.2. Estimating Multi-Modal Gaussian Functions


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
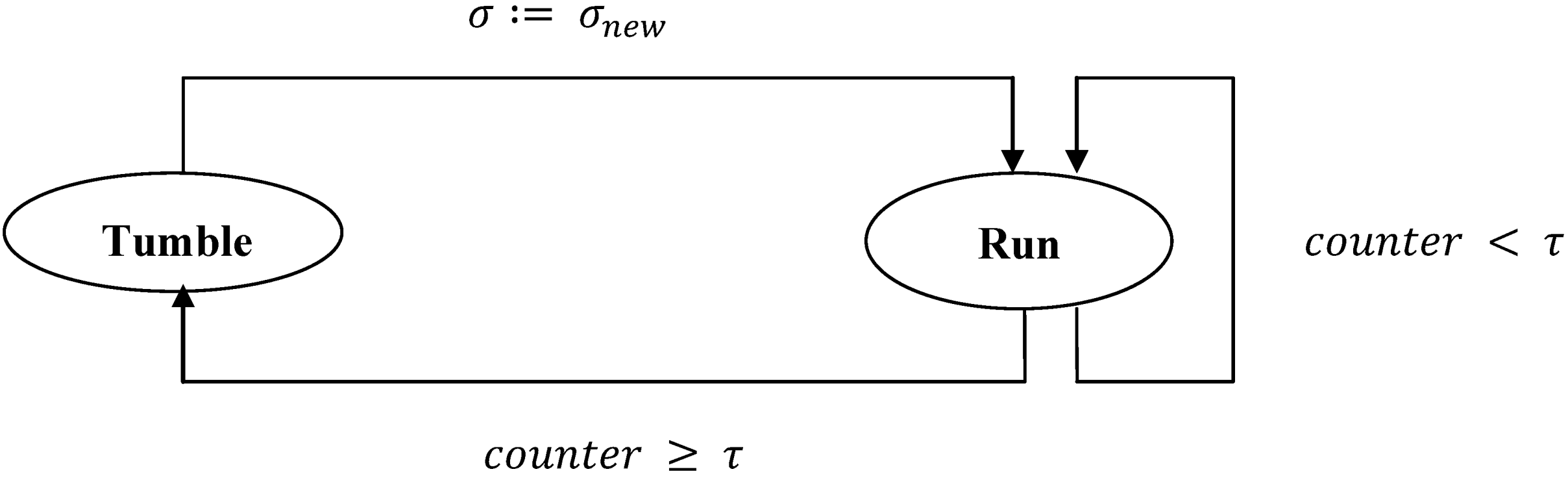
| run bacteria and flocking controller |
| collect data from environment and neighbours |
| update counter |
| if counter > noOfRuns then |
| Use GA to estimate model |
| end if |
| use GA estimates to update velocity function. |
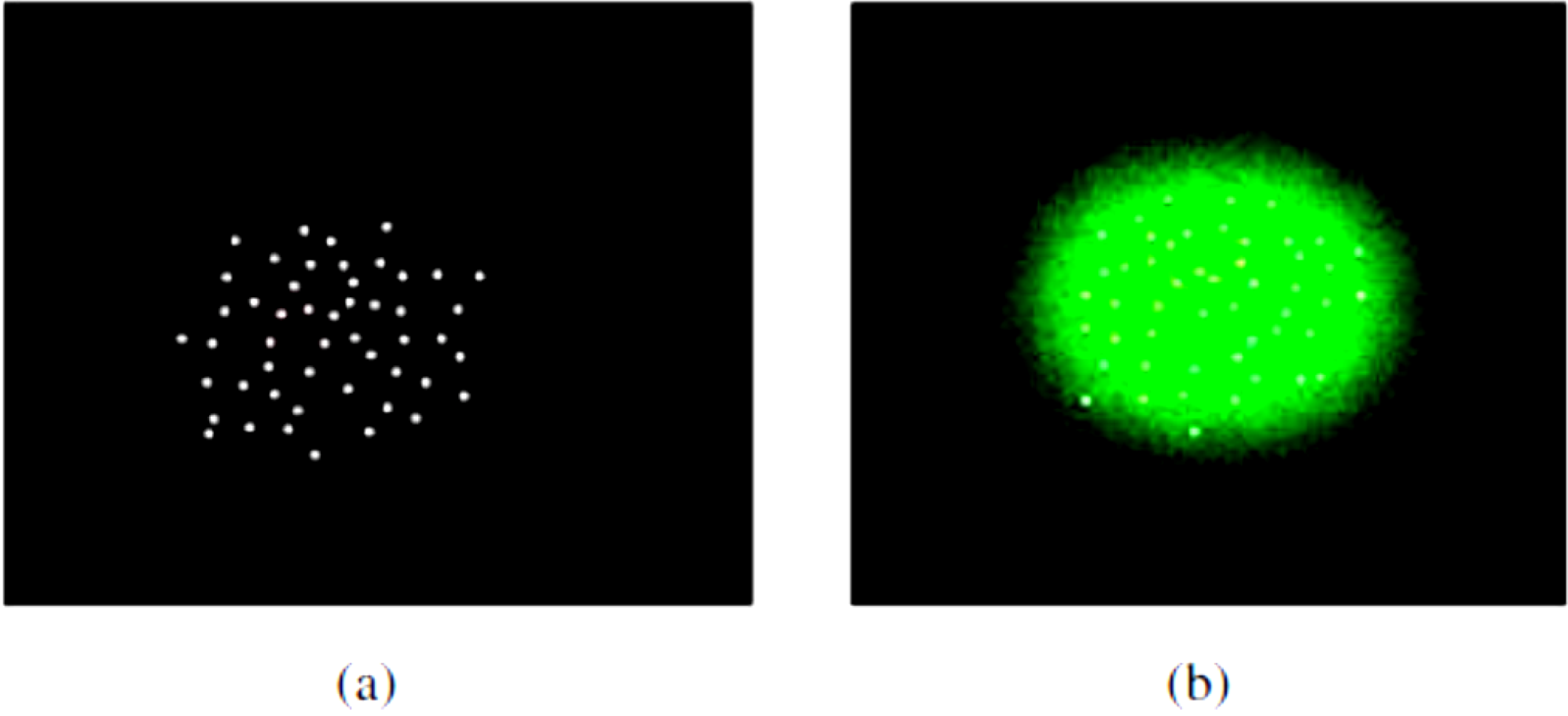
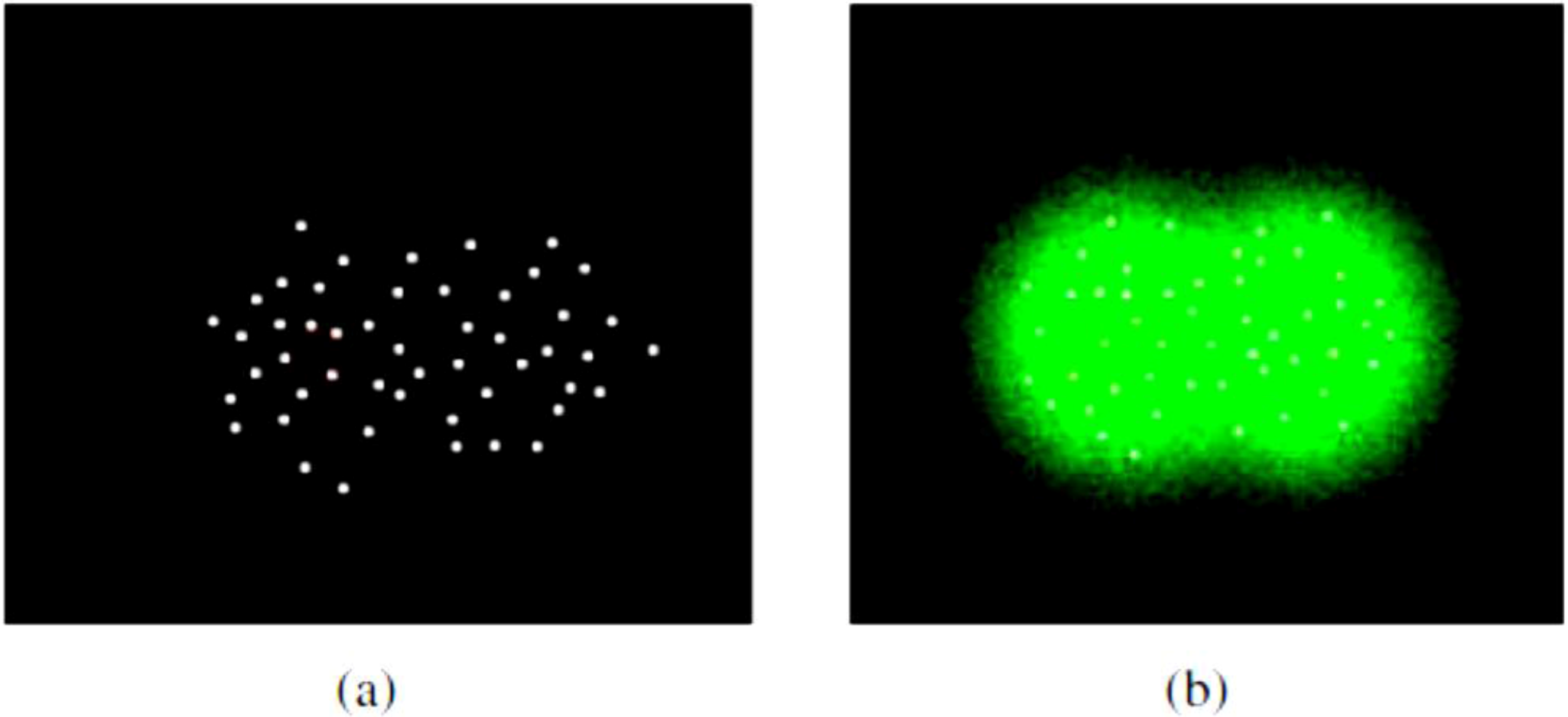
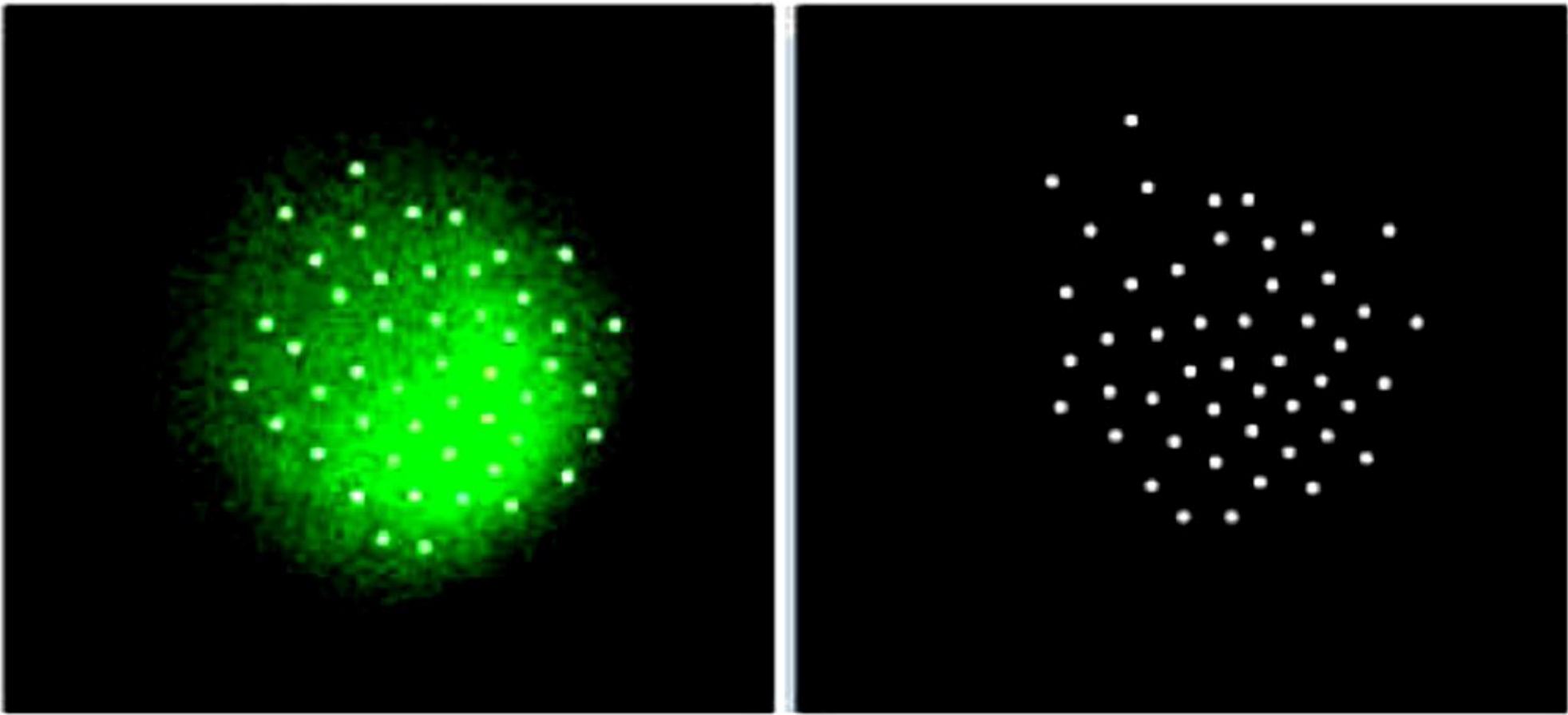
4. Simulation and Results
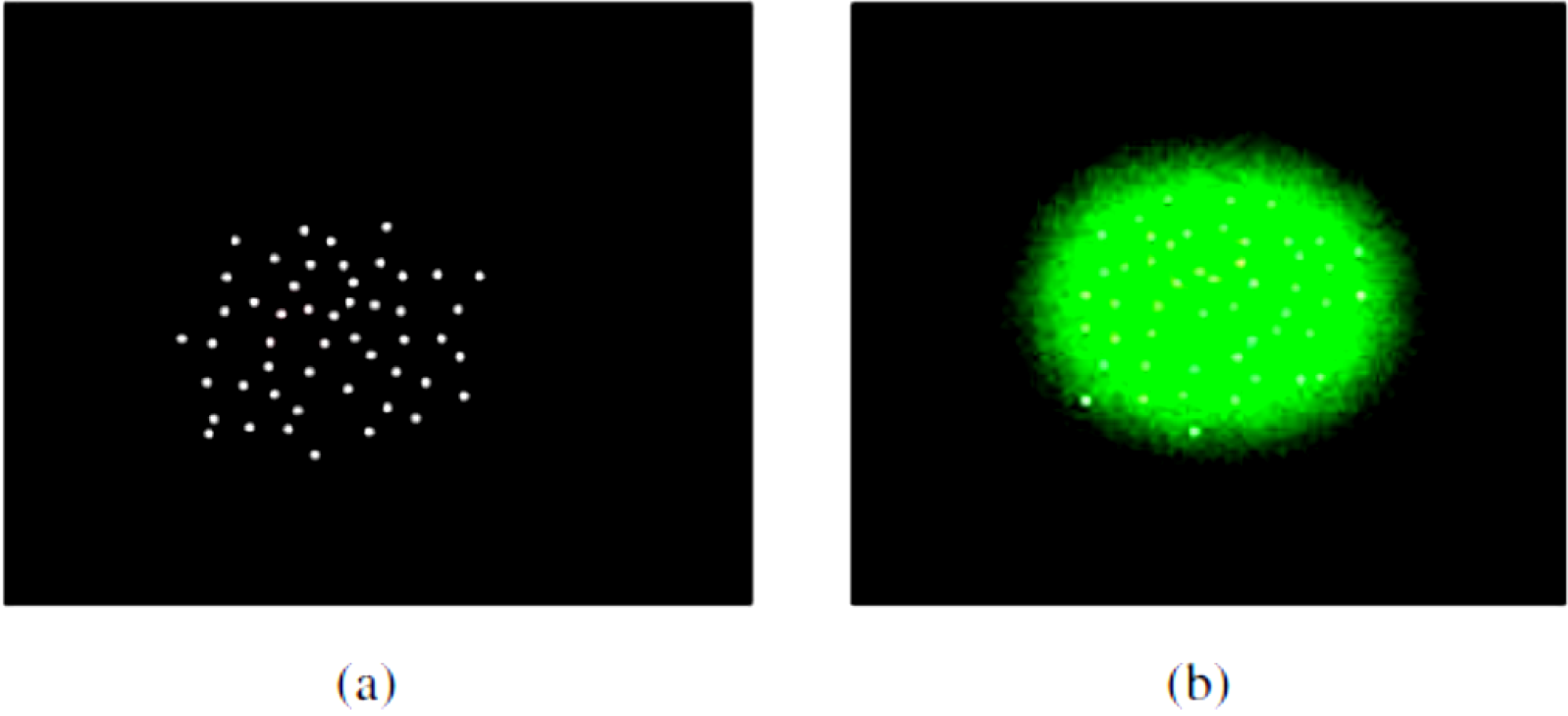
4.1. Simple Gaussian Functions
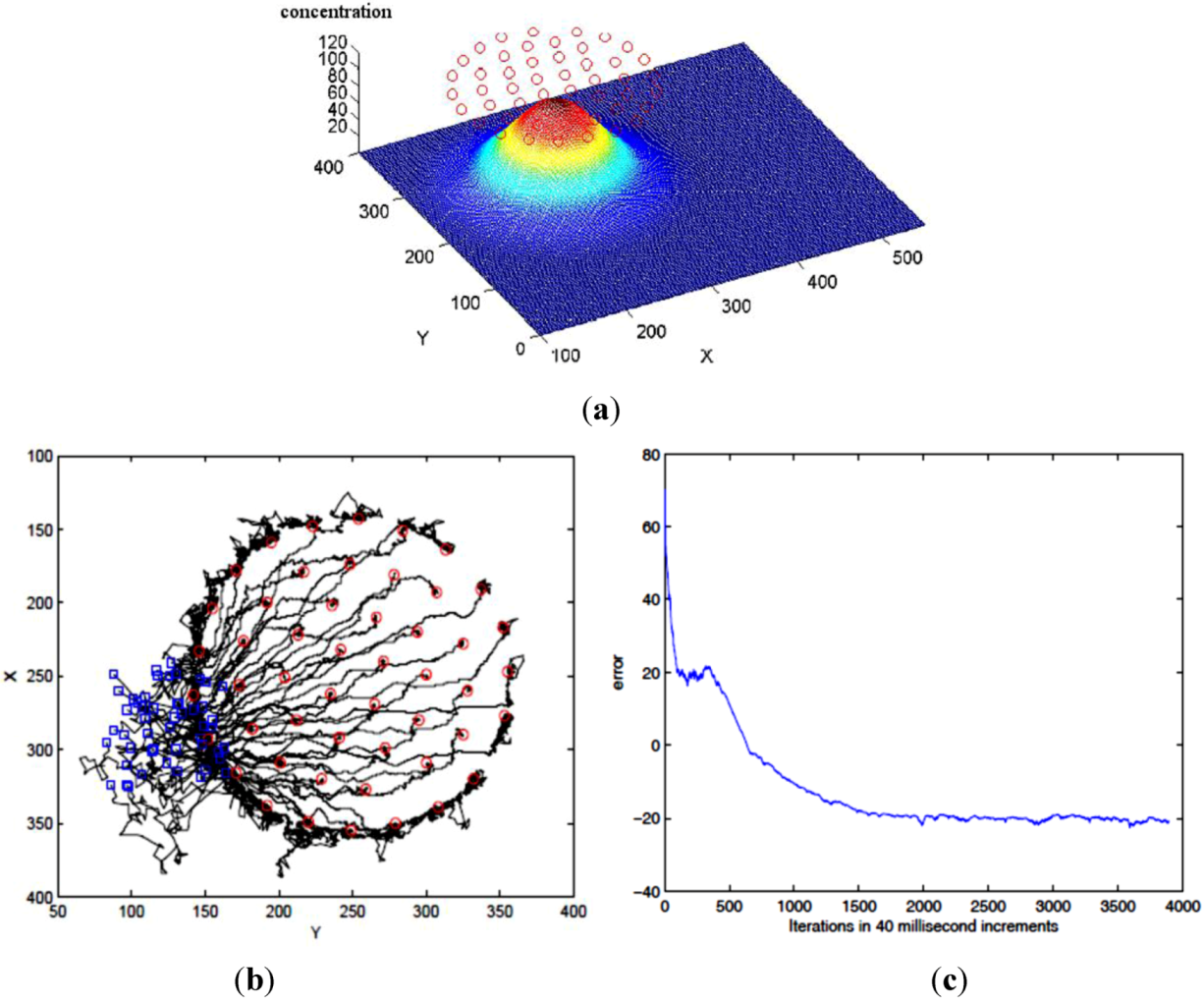
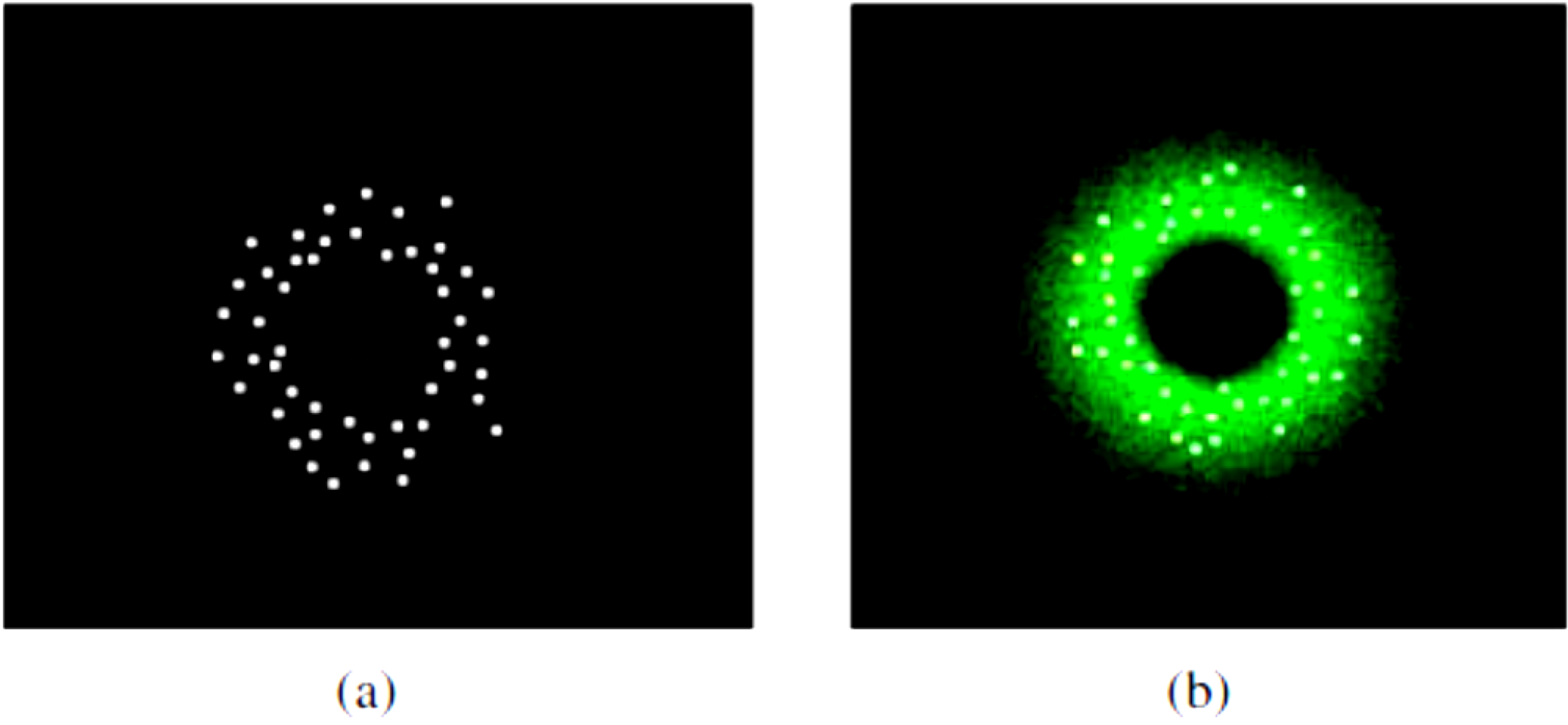
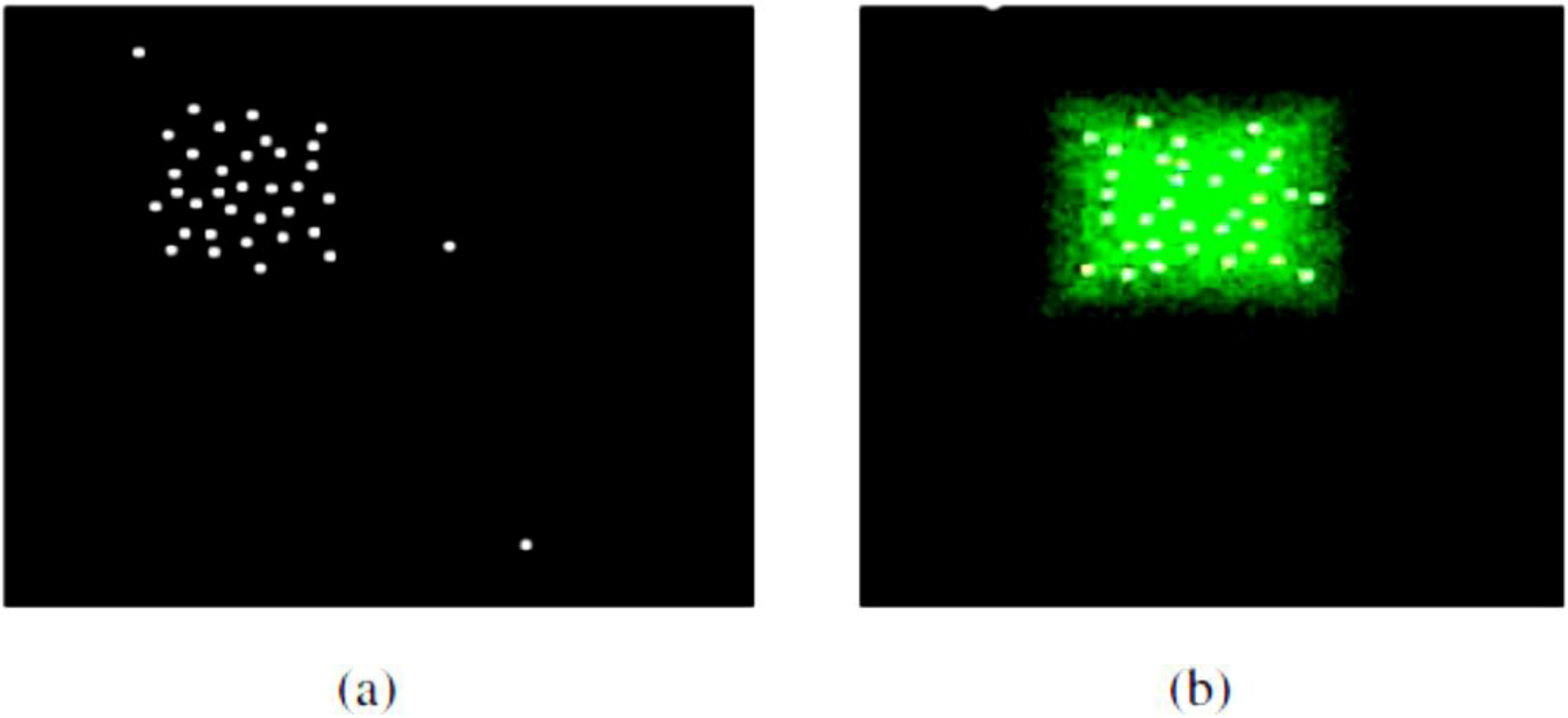
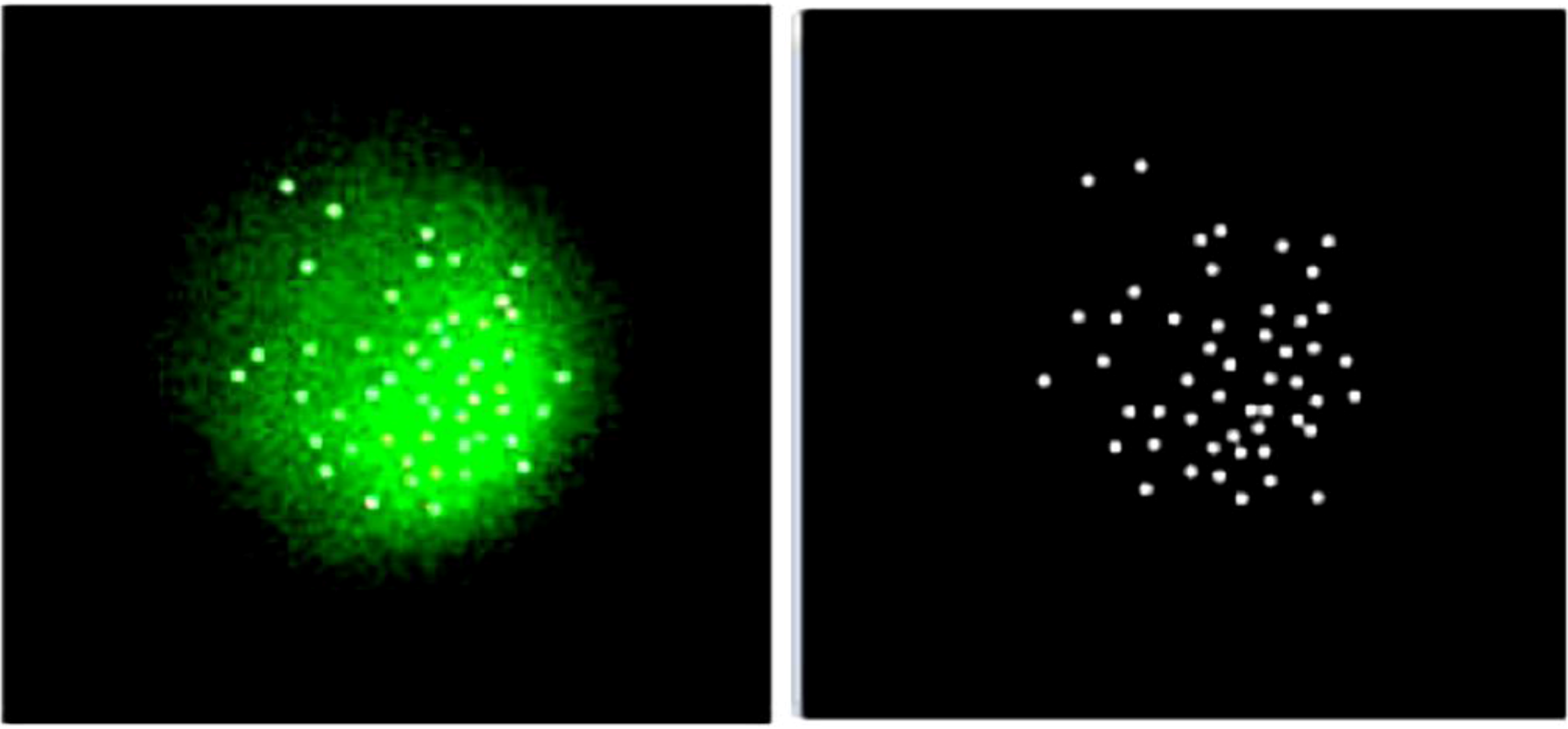
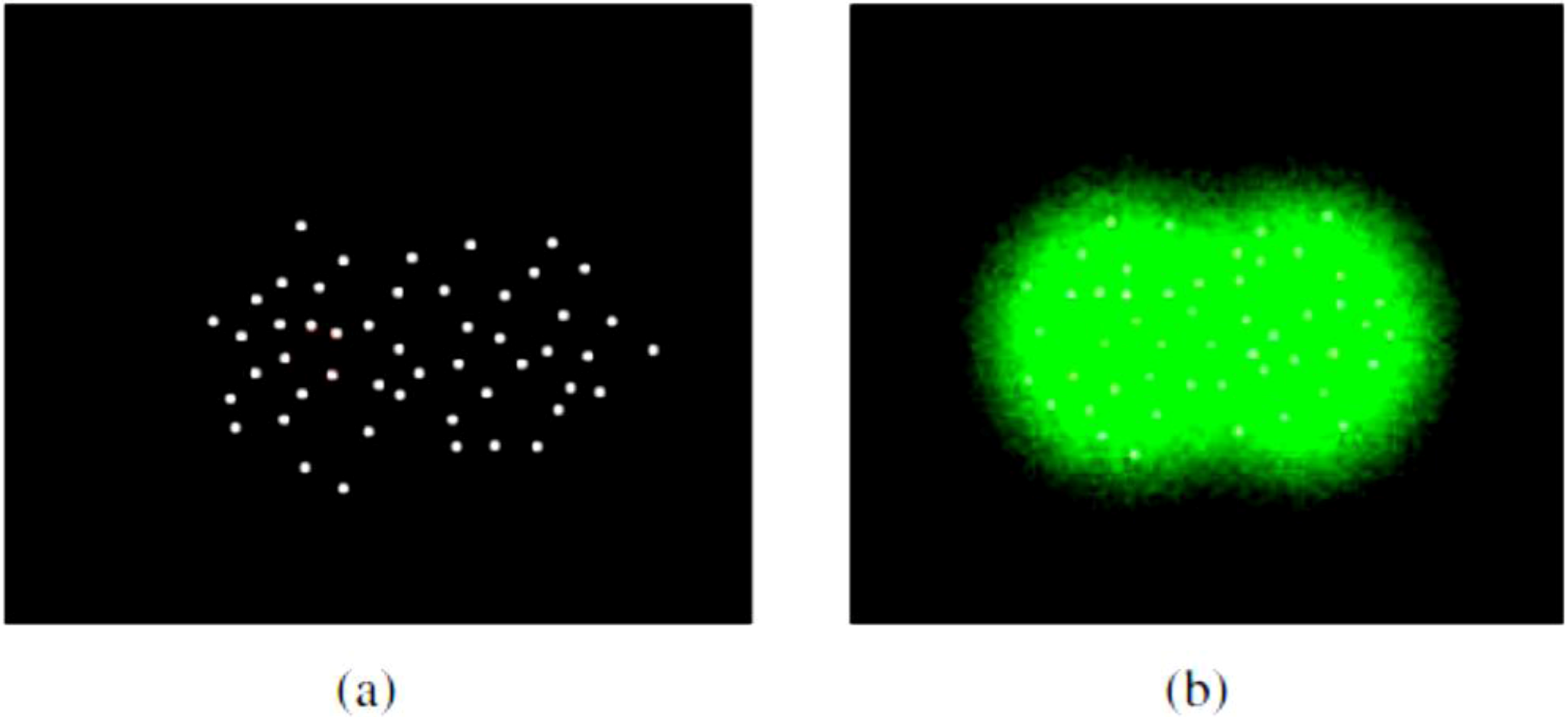
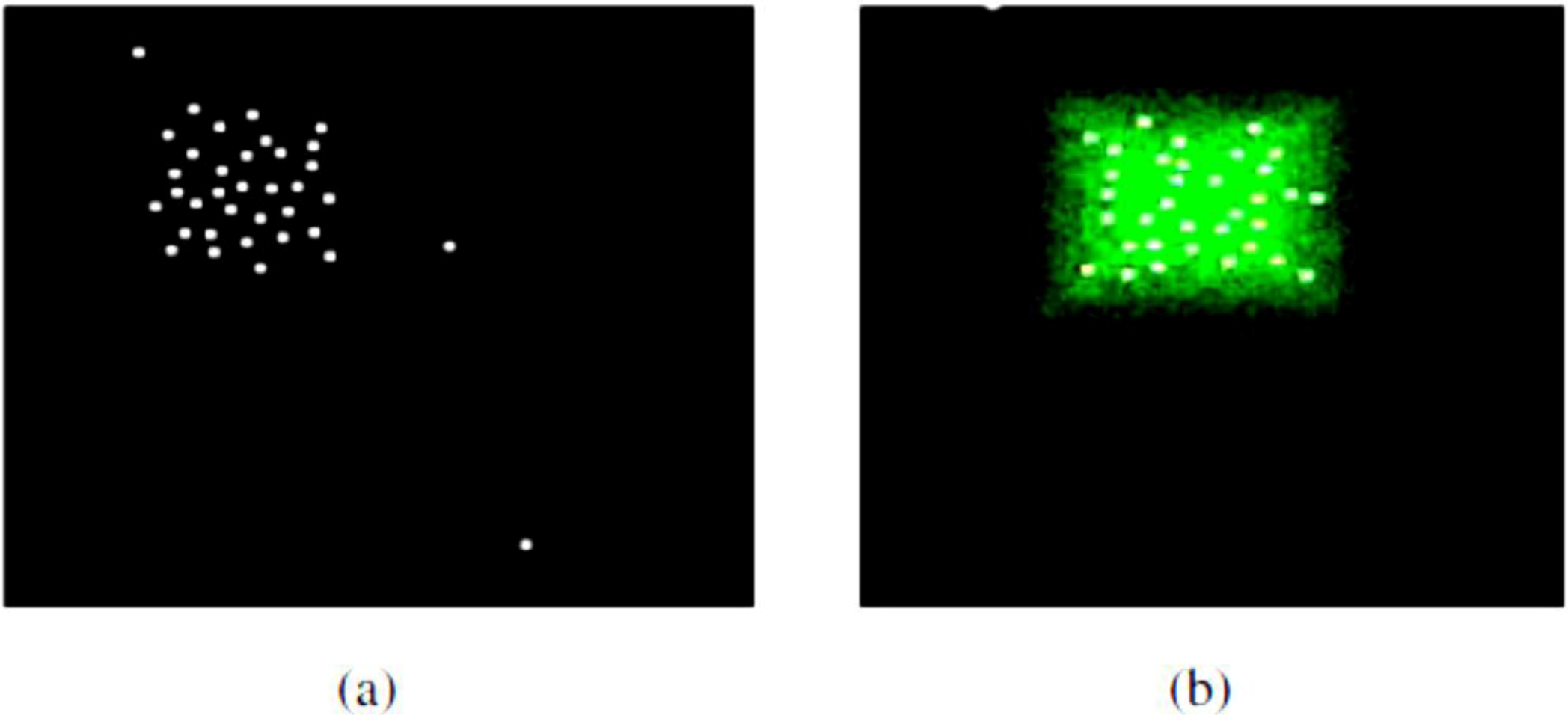
4.2. Multi-Modal Gaussian Function
5. Conclusion
Acknowledgments
References
- Ramana, M.V.; Ramanathan, V.; Kim, D.; Roberts, G.C.; Corrigan, C.E. Albedo, atmospheric solar absorption and heating rate measurements with stacked UAVs. Quart. J. Roy. Meteorol. Soc. 2007, 133, 1913–1931. [Google Scholar] [CrossRef]
- Giudice, A.G.; Melita, L.C.D.; Orlando, M.A. An overview of the “Volcan Project”: An UAS for exploration of volcanic environments. In Unmanned Aircraft Systems; Springer: Berlin, Germany, 2009; pp. 471–494. [Google Scholar]
- Puzis, R.; Altshuler, Y.; Elovici, Y.; Bekhor, S.; Shiftan, Y.; Pentland, A. Augmented Betweenness Centrality for Environmentally-Aware Traffic Monitoring in Transportation Networks. Available online: http://web.media.mit.edu/~yanival/JITS-environmental.pdf (accessed on 8 November 2012).
- Cortes, J.; Martinez, S.; Karatas, T.; Bullo, F. Coverage control for mobile sensing networks. IEEE Trans. Robotics Automat. 2004, 20, 243–255. [Google Scholar] [CrossRef]
- Schwager, M.; Slotine, J.; Rus, D. Consensus Learning for Distributed Coverage Control. In Proceedings of International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008; pp. 1042–1048.
- Schwager, M.; Mclurkin, J.; Slotine, J.E.; Rus, D. From theory to practice: Distributed coverage control experiments with groups of robots. Springer Tracts Adv. Robotics 2009, 54, 127–136. [Google Scholar] [CrossRef]
- Cortez, R.A.; Tanner, H.G.; Lumia, R. Distributed robotic radiation mapping. Springer Tracts Adv. Robotics 2009, 54, 147–156. [Google Scholar] [CrossRef]
- Pimenta, L.C.A.; Schwager, M.; Lindsey, Q.; Kumar, V.; Rus, D.; Mesquita, R.C.; Pereira, G.A.S. Simultaneous coverage and tracking (SCAT) of moving targets with robot networks. Springer Tracts Adv. Robotics 2010, 8, 1–16. [Google Scholar]
- Schwager, M.; Slotine, J.; Rus, D. Decentralized, Adaptive Control for Coverage with Networked Robots. In Proceedings of IEEE International Conference on Robotics and Automation, Roma, Italy, 10–14 April 2007; pp. 3289–3294.
- Shucker, B.; Murphey, T.; Bennett, J.K.; Member, S. Convergence preserving switching for topology dependent decentralized systems. IEEE Trans. Robot. 2008, 24, 1–11. [Google Scholar] [CrossRef]
- Shucker, B.; Murphey, T.; Bennett, J.K. An Approach to Switching Control beyond Nearest Neighbor Rules. In Proceedings of American Control Conference, Minneapolis, MN, USA, 14–16 June 2006.
- Kwok, A.; Martinez, S. A Distributed Deterministic Annealing Algorithm for Limited-Range Sensor Coverage. In Proceedings of American Control Conference, St. Louis, MI, USA, 10–12 June 2009; pp. 1448–1453.
- Pang, S.; Farrell, J.A. Chemical plume source localization. IEEE Trans. Syst. Man Cybern. B Cybern. 2006, 36, 1068–1080. [Google Scholar] [CrossRef]
- Koenig, S. Terrain Coverage with Ant Robots: A Simulation Study. In Proceedings of the International Conference on Autonomous Agents, Montreal, Canada, 28 May–1 June 2001; pp. 600–607.
- Koenig, S.; Szymanski, B.; Liu, Y. Efficient and inefficient ant coverage methods. Ann. Math. Artif. Intell. 2001, 31, 41–76. [Google Scholar]
- Wagner, I.A.; Altshuler, Y.; Yanovski, V.; Bruckstein, A.M. Cooperative cleaners: A study in ant robotics. Int. J. Robot. Res. 2008, 27, 127–151. [Google Scholar] [CrossRef]
- Altshuler, Y.; Yanovsky, V.; Wagner, I.A.; Bruckstein, A.M. Swarm Robotics for a Dynamic Cleaning Problem. In Proceedings of the IEEE Swarm Intelligence Symposium, Pasadena, CA, USA, June 2005; pp. 1–14.
- Altshuler, Y.; Bruckstein, A.M. Static and expanding grid coverage with ant robots: Complexity results. Theor. Comput. Sci. 2011, 412, 4661–4674. [Google Scholar] [CrossRef]
- Borie, R.; Tovey, C. Algorithms and Complexity Results for Pursuit-Evasion Problems. In Proceedings of the Twenty-First International Joint Conference on Artificial Intelligence, Pasadena, CA, USA, 11–17 July 2009; pp. 59–66.
- Arkin, R.C. Behaviour-Based Robotics; The MIT Press: Cambridge, MA, USA, 1998. [Google Scholar]
- Schwager, M.; Slotine, J.; Rus, D. Unifying Geometric, Probabilistic, and Potential Field Approaches to Multi-Robot Coverage Control. In Proceedings of the International Symposium on Robotics Research, Lucerne, Switzerland, 31 August–3 September 2009.
- Oyekan, J.; Hu, H.; Gu, D. A Novel Bio-Inspired Distributed Coverage Controller for Pollution Monitoring. In Proceedings of the 2011 IEEE International Conference on Mechatronics and Automation, Beijing, China, 7–10 August 2011; pp. 1651–1656.
- Baronov, D.; Baillieul, J. Autonomous Vehicle Control for Ascending/Descending along a Potential Field with Two Applications. In Proceedings of the American Control Conference, Seattle, WC, USA, 11–13 June 2008; pp. 678–683.
- Mayhew, C.G.; Sanfelice, R.G.; Teel, A.R. Robust Source-Seeking Hybrid Controllers for Nonholonomic Vehicles. In Proceedings of the American Control Conference, Seattle, WC, USA, 11–13 June 2008; pp. 2722–2727.
- Dhariwal, A.; Sukhatme, G.S.; Requicha, A.A.G. Bacterium-Inspired Robots for Environmental Monitoring. In Proceedings of IEEE International Conference on Robotics and Automation, New Orleans, LA, USA, 26 April–1 May 2004; pp. 1436–1443.
- Marques, L.; Nunes, U.; Almeida, T.D. Olfaction-based mobile robot navigation. Thin Solid Films 2002, 418, 51–58. [Google Scholar]
- Lilienthal, A.; Duckett, T. Experimental Analysis of Smelling Braitenberg Vehicles. In Proceedings of IEEE International Conference on Advanced Robotics, Coimbra, Portugal, 30 June–3 July 2003; pp. 375–380.
- Brown, D.A.; Berg, H.C. Temporal stimulation of chemotaxis in Escherichia coli. Proc. Natl. Acad. Sci. USA 1974, 71, 1388–1392. [Google Scholar]
- Yi, T.; Huang, Y.; Simon, M.; Doyle, J. Robust perfect adaptation in bacterial chemotaxis through integral feedback control. Proc. Natl. Acad. Sci. 2000, 97, 4649–4653. [Google Scholar]
- Berg, H.C.; Purcell, E.M. Physics of chemoreception. Biophys. J. 1977, 20, 193–219. [Google Scholar]
- Oyekan, J.; Hu, H. Bacteria Controller Implementation on a Physical Platform for Pollution Monitoring. In Proceedings of IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–8 May 2010; pp. 3781–3786.
- Oyekan, J.O.; Hu, H.; Gu, D. Bio-inspired coverage of invisible hazardous substances in the environment. Int. J. Inform. Acquis. 2010, 7, 193–204. [Google Scholar]
- Oyekan, J.; Gu, D.; Hu, H. Hazardous Substance Source Seeking in a Diffusion Based Noisy Environment. In Proceedings of the 2012 IEEE International Conference on Mechatronics and Automation, Sichuan, China, 5–8 August 2012; pp. 708–713.
- Oyekan, J.; Gu, D.; Hu, H. Visual imaging of invisible hazardous substances using bacterial inspiration. IEEE Trans. Syst. Man Cybern. Syst. Hum. 2013, in press. [Google Scholar]
- Hamann, H.; Heinz, W. A framework of space-time continuous models for algorithm design in swarm robotics. Swarm Intelligence 2008, 2, 209–239. [Google Scholar]
- Schweitzer, F. Brownian Agent Models for Swarm and Chemotactic Interaction Brownian Agents. In Proceedings of the Fifth German Workshop on Artificial Life, Lübeck, Germany, 12–18 March 2002; pp. 181–190.
- Reynolds, C.W. Flocks, Herds and Schools: A Distributed Behavioral Model. In Proceedings of the 14th Annual Conference on Computer Graphics and Interactive Techniques, New York, NY, USA, July 1987; Volume 21, pp. 25–34.
- Hanay, Y.S.; Ilter, M. Aggregation, Foraging, and Formation Control of Swarms with Non-Holonomic Agents Using Potential Functions and Sliding Mode Techniques. In Proceedings of European Control Conference (ECC 2007), Kos, Greece, 2–5 July 2007; Volume 15, pp. 149–168.
- Gazi, V. Coordination and Control of Multi-Agent Dynamic Systems: Models and Approaches. In Proceedings of the 2nd International Conference on Swarm Robotics (SAB ’06), Rome, Italy, 30 September 30–1 October 2006; pp. 71–102.
- Olfati-saber, R. Flocking for multi-agent dynamic systems: Algorithms and theory. IEEE Trans. Automat. Contr. 2006, 54, 401–420. [Google Scholar]
- Smith, J.A. Comparison of Hard-Core and Soft-Core Potentials for Modelling Flocking in Free Space. Available online: http://arxiv.org/abs/0905.2260 (accessed on 8 November 2012).
- Oyekan, J.; Hu, H.; Gu, D. Exploiting Bacterial Swarms for Optimal Coverage of Dynamic Pollutant Profiles. In Proceedings of the IEEE International Conference on Robotics and Biomimetics, Tianjin, China, 14–18 December 2010; pp. 1692–1697.
- Sanner, R.; Slotine, J.J. Gaussian networks for direct adaptive control. IEEE Trans. Neural Networks 1992, 3, 837–863. [Google Scholar]
© 2013 by the authors; licensee MDPI, Basel, Switzerland. This article is an open-access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Oyekan, J.; Hu, H. Ant Robotic Swarm for Visualizing Invisible Hazardous Substances. Robotics 2013, 2, 1-18. https://doi.org/10.3390/robotics2010001
Oyekan J, Hu H. Ant Robotic Swarm for Visualizing Invisible Hazardous Substances. Robotics. 2013; 2(1):1-18. https://doi.org/10.3390/robotics2010001
Chicago/Turabian StyleOyekan, John, and Huosheng Hu. 2013. "Ant Robotic Swarm for Visualizing Invisible Hazardous Substances" Robotics 2, no. 1: 1-18. https://doi.org/10.3390/robotics2010001
APA StyleOyekan, J., & Hu, H. (2013). Ant Robotic Swarm for Visualizing Invisible Hazardous Substances. Robotics, 2(1), 1-18. https://doi.org/10.3390/robotics2010001