DSCBlocks: An Open-Source Platform for Learning Embedded Systems Based on Algorithm Visualizations and Digital Signal Controllers


Abstract
:1. Introduction
2. Background
2.1. The Concept of Algorithm Visualization (AV)
- To illustrate an algorithm by the instructor.
- To understand the mechanism of basic algorithms.
- To debug an algorithm by students.
- To help pupils understand the function and operation of abstract data type.
- Providing an input to the algorithm in order to modify its features.
- Including a hypertext that explains the visualization of the algorithm.
- Preferring general-purpose systems over topic-specific systems in virtue of the reuse option.
- Integrating a database for course management.
- What is the audience for your language? Who are you building for?
- What is the scope of your language? An excessive amount of blocks in the language could overwhelm or to generate distractions in the users.
- Employ a natural language in the VLP. With it, the users can build the AVs in an intuitive way.
2.2. Related Works
3. Platform Design and Implementation
3.1. Software Component
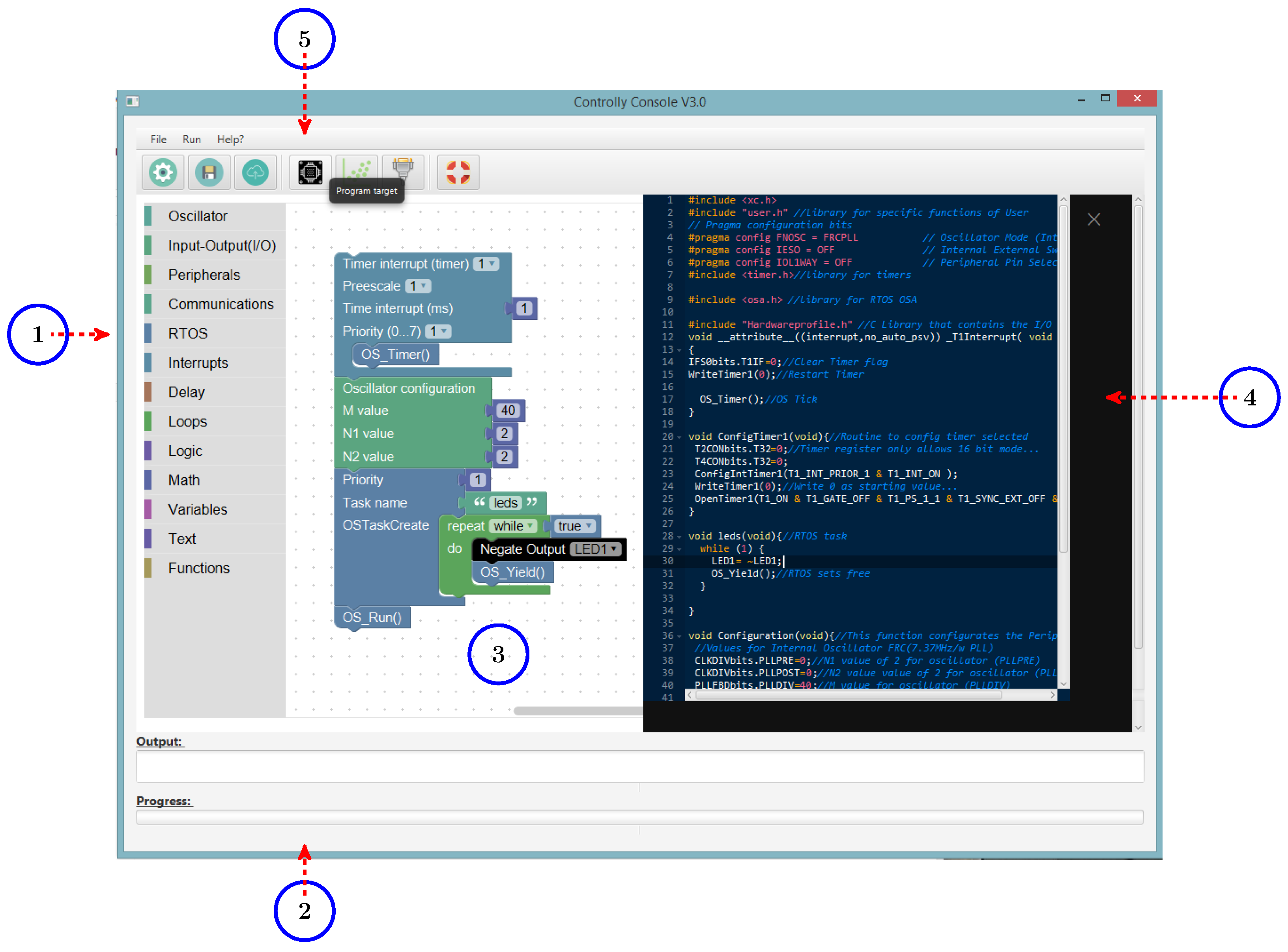
3.1.1. Presentation Layer
- Oscillator: In this category, the user can configure the oscillator of the DSC. For the dsPICs 33FJ128GP804 and 33FJ128MC802, the equation that defines their operation frequency in Hz is the following:where is the frequency of the internal FRC oscillator (7.37 MHz), is the output frequency of the Phase-Locked Loop (PLL), M is the PLL multiplier and and compound the PLL postscale. The values of , , and M are established by the user. For instance, when = 2, = 2, M = 40, these values yield a frequency of 36.85 MHz (36.85 MIPS). The graphical block converts the previous values in the respective code for the registers involved in the configuration of the oscillator, in this case CLKDIV and PLLFBD.
- Input–Output: In this category are located the blocks for reading and writing the logical state of the DSC pins. Every block sets up the specific configuration register (TRISx) and assigns the logical state specified by the user (1 or 0). The pins that a user can employ are mapped in a C header file called <HardwareProfile.h>. This file contains the names of every pin provided by the manufacturer with a macro, e.g., the Pin1 in the application is RB12 in the DSC.
- Peripherals: In this category, the user can configure the Analog to Digital Converter (ADC), Pulse Width Modulation (PWM) or Digital Analog Converter (DAC) peripherals. With respect to ADC, it was configured in 12-bit mode with an input voltage in the scale 0–3.3 V. The resolution for the ADC is given by Equation (2).The block ADC Single reads the ADC channel selected by the user and returns an integer variable with the respective value in 12-bit. The block ADC Multiple Channels reads simultaneously up to four channels and returns the values in a set of preloaded variables (L0, L1, L2, and L3). The user must declare them, employing the category variables available in Blockly. In addition, this block uses the Timer 3 of the DSC to sample the indicated channels. PWM was configured in 10-bit mode with the XC16 library <pwm.h>. Four channels could be selected with the designed block. Moreover, the user can adjust the frequency in Hz and the pre-scale when a value for the register OCxR (Duty cycle register) is outside the maximum value in a 16-bit architecture. The pre-scale decreases this value.Regarding DAC, the block configures the device MCP4822 [29], which is a 12-bit DAC in a range from 0 to 3.3 V. This device operates with SPI protocol and it contains a single register to write the digital value to convert. The user must indicate an integer variable and one channel (A or B) to write a voltage value in the mentioned scale. For instance, when the user writes the value 2048, it will correspond to the analog value of 1.65 V.
- Communications: This category contains several blocks to handle the UART peripheral with a default baud rate of 57,600. The blocks were designed utilizing the XC16 library <UART.h>. The library starts up the UART peripheral with the parameters specified by the user (interrupts in transmission or reception, addressing mode in eight or nine bits, interruption priority, etc.). Additionally, several functions were developed to transform either an integer or float variable in a string ready to transmit. The category has several blocks to writing and reading data: UART write text, UART write integer, UART write float and UART read data.
- RTOS: For the platform, OSA was selected, which is a small RTOS compatible with dsPIC. OSA [30] is a cooperative multitasking RTOS that uses, in this case, Timer 1 to generate the Tslice for the different assigned tasks. In a cooperative RTOS, each tasks is executed periodically with a time provided by the system scheduler [31]. In the category, some blocks were designed to create and run tasks with priority in the range 0–7, where 0 is the highest level of priority and so on. A Java class copies the contents (folders and subfolders) of this RTOS into the user’s folder to compile with XC16. An example of code with the blocks is shown in Algorithm 1.
- Interrupt: In this category, a timer interrupt was designed with the associated Interruption Service Routine (ISR). The graphical block contains several inputs such as pre-scale, clock tick between interrupts in ms and priority in the range 0–7. These elements serve to open and configure the timer selected by the user. The block operates with the frequency provided by the oscillator block that the student must configure previously. An “Interrupt” is a key concept because it allows understanding the architecture of any embedded system, in this case, concerning the DSCs. As concept, Di Jasio [32] defined an interrupt as an external or internal event that requires a quick CPU intervention. A code example with this block is shown in Algorithm 2 with a time between interrupts of 1 ms, a DSC frequency of 36.86 MHz and 1:1 pre-scale.
- Delay: In this category, several blocks for delays in ms and μs, and instruction cycles were designed. The XC16 library <libpic30.h> was employed to create the delays based on instruction cycles according to the frequency specified by the user. For example, for a frequency of 36.86 MHz and a delay of 10 ms, the block delay(ms) will return the statement _delay32(368500).
- Functions: In this category, the user can create C functions either with or without return variable. In addition, the names and invoke parameters of each function must be defined by the user as global variables. The functions make the code more readable and organized for the students.
| Algorithm 1 Example of generated code for the RTOS (OSA). |
| //Task (Pin oscillator) |
| void Task2(void){ |
| while(1){//Task in infinite loop. Feature of cooperative RTOS. |
| PIN1=1;//Write logical 1 on PIN1. |
| OS_Delay(10000);//Task Delay (10000 clock ticks). |
| PIN1=0;//Write logical 0 on PIN1. |
| OS_Delay(10000);//Task Delay (10000 clock ticks). |
| OS_Yield();//Return to scheduler. |
| { |
| { |
| Algorithm 2 Example of generated code for the block (Timer interrupt). |
| #include <timer.h>//XC16 Timer Library |
| //Interruption Service Routine (ISR) for Timer1 |
| void __attribute__((interrupt,no_auto_psv)) _T1Interrupt( void ) |
| { |
| IFS0bits.T1IF=0;//Clear Timer flag |
| WriteTimer1(0);//Restart Timer |
| } |
| //Routine to configure the selected timer |
| void ConfigTimer1(void){ |
| T2CONbits.T32=0;//Timer register in 16-bit mode |
| T4CONbits.T32=0; |
| ConfigIntTimer1(T1_INT_PRIOR_0 & T1_INT_ON ); //Set-up of Timer1. |
| WriteTimer1(0);//Write 0 to the Timer |
| OpenTimer1(T1_ON & T1_GATE_OFF & T1_PS_1_1 |
| & T1_SYNC_EXT_OFF &T1_SOURCE_INT,36850);//Clock tick of 1ms. |
| } |
3.1.2. Application Layer
| Algorithm 3 JavaScript Behavior function for the Block Delay (ms). |
| Blockly.Dart.delay=function() {//Delay function |
| var OSCVal=Blockly.Dart.valueToCode(this,’Time’, |
| Blockly.Dart.ORDER_ATOMIC); |
| var code=__delay32(’+OSCVal+’);//Returned code for the block. |
| return code; |
| }; |
3.1.3. Hardware Abstraction Layer
3.1.4. Application Summary
- Processor: Intel(R) Core (TM) i5-4460T @ 1.9 GHz.
- Installed memory RAM: 8 GB
- System type: 64-bit operating system. (Windows 8).
- Local disc capability: 1.5 TB
- Java version: 1.8.0.121
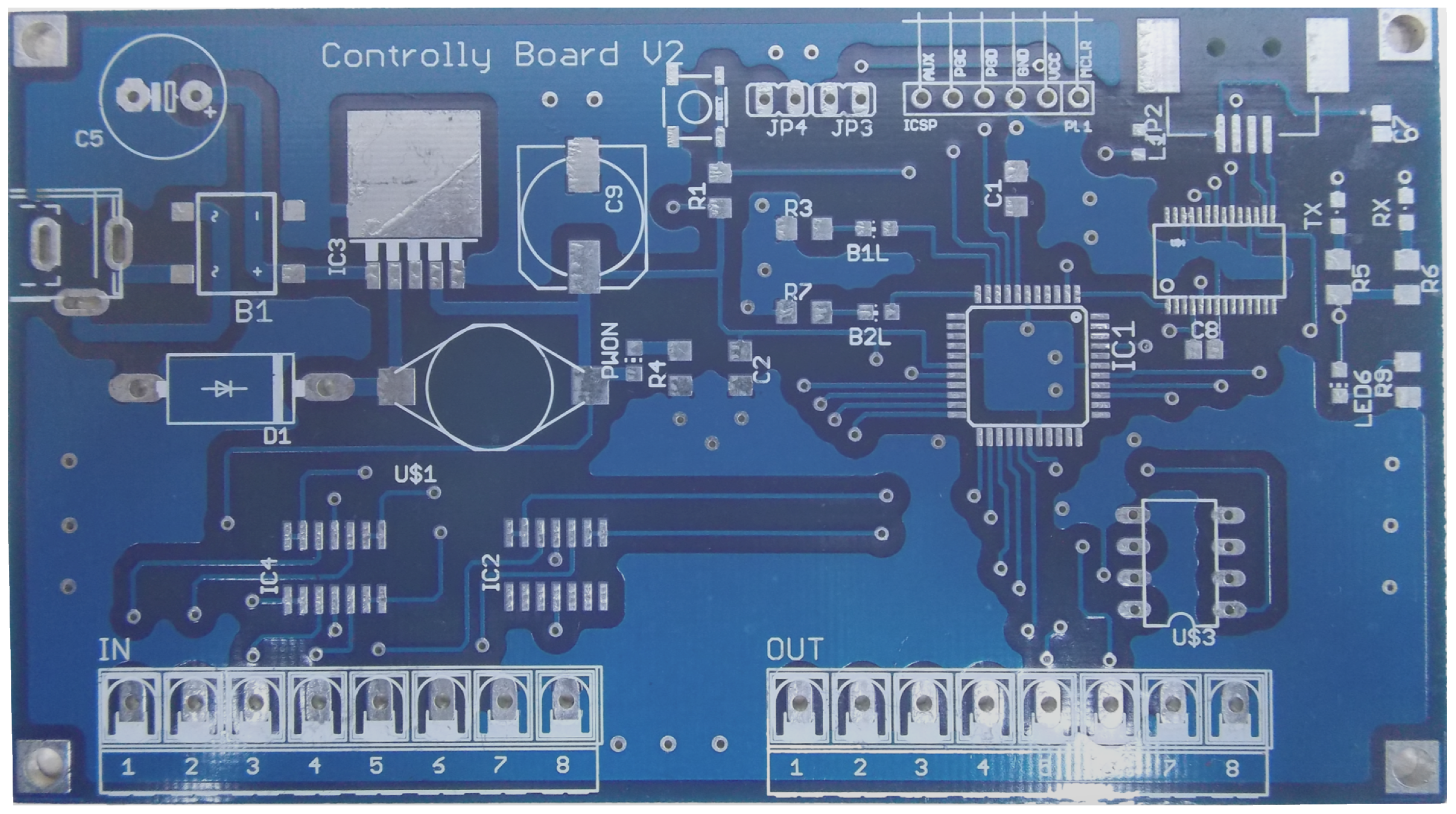
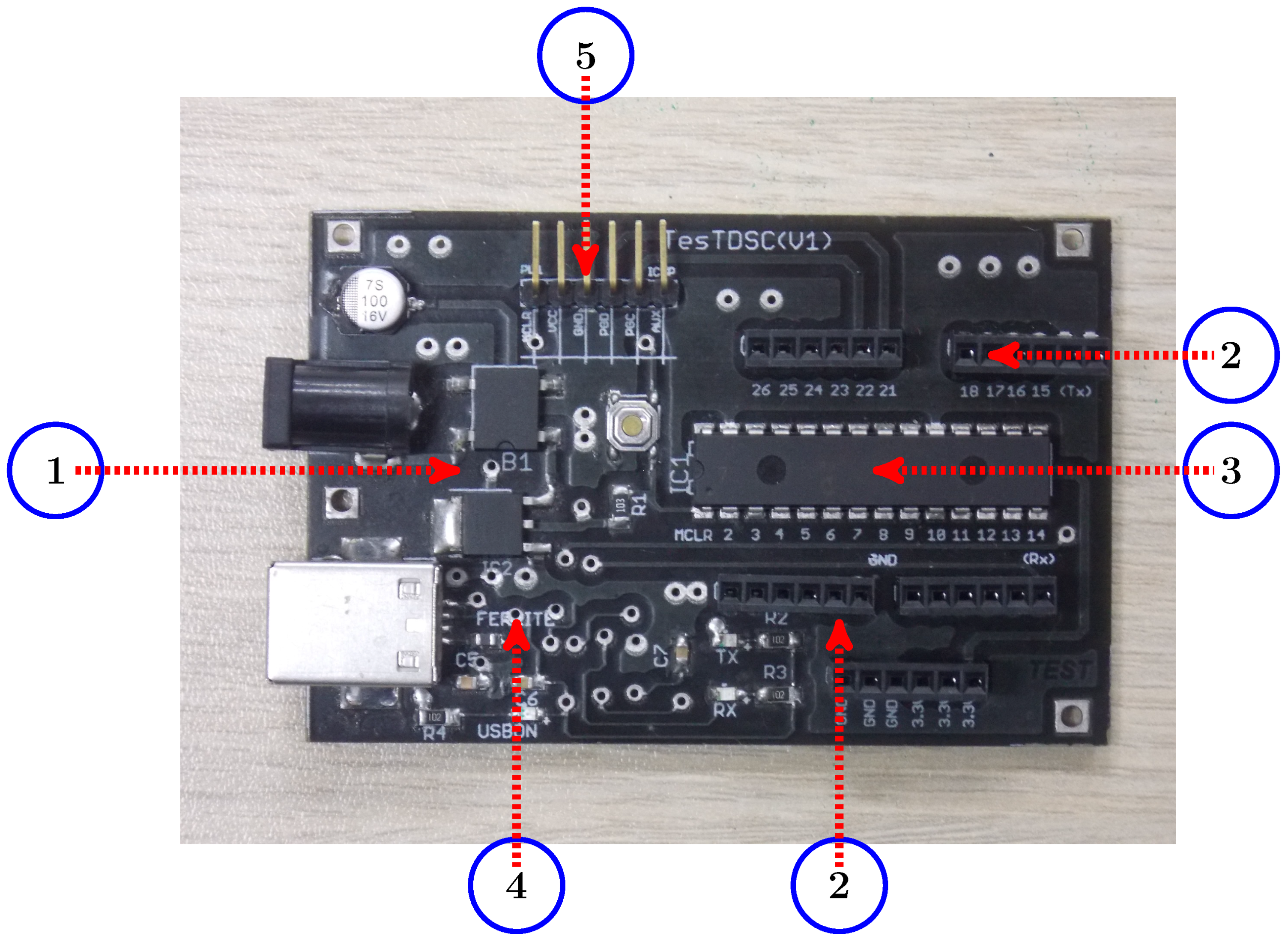
3.2. Hardware Component
4. Experiments
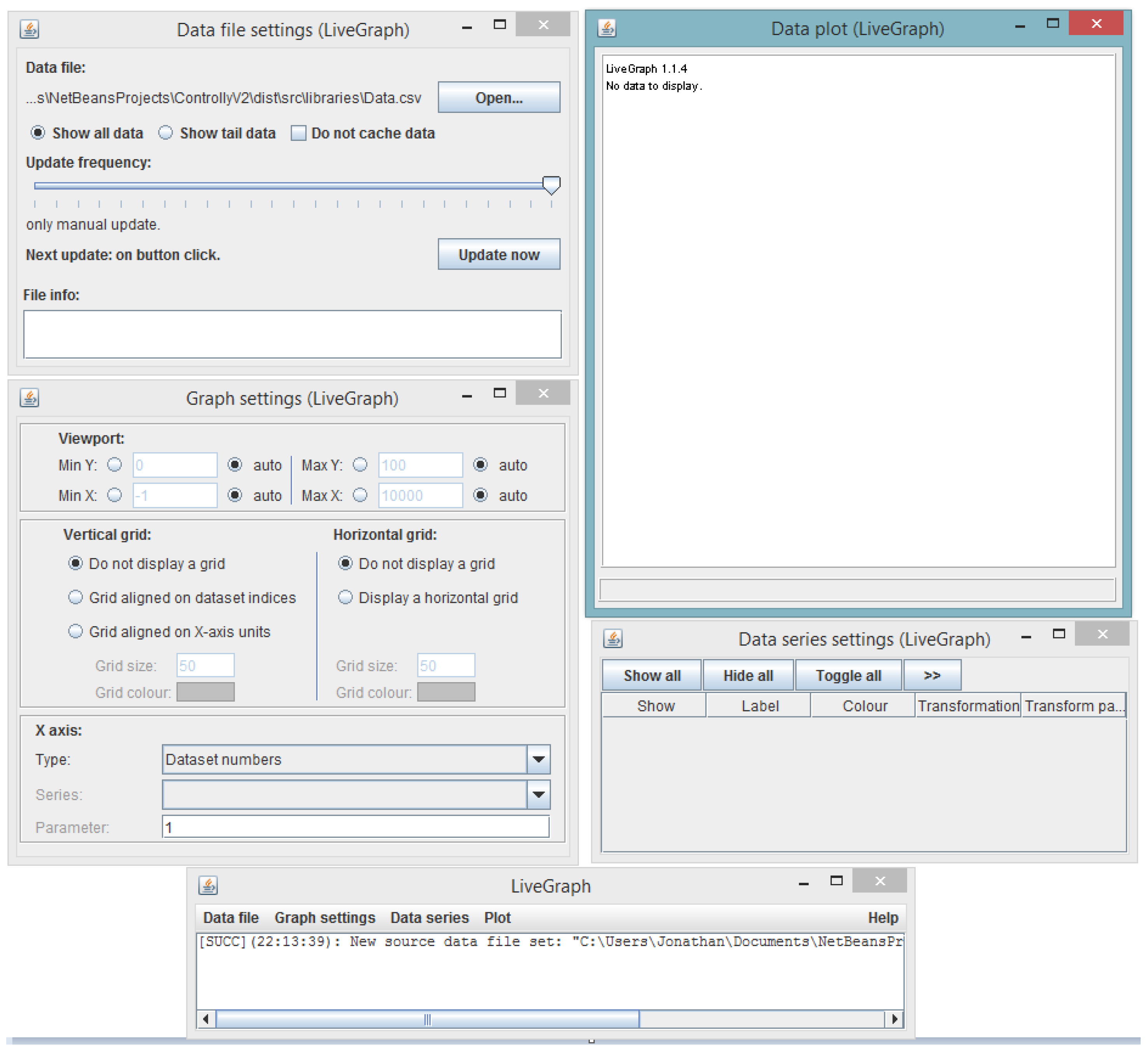
4.1. Example 1: ADC plotting
- Plug-in the development board to a PC. Configure the project in the application using the project wizard.
- Create the AV according to the specifications of a design. Use the palette to get the different graphical blocks that are needed in the AV. Program the development board with this.
- Debug the AV. For this example, connect a potentiometer on input 1.
- Open the plotter, specifying the number of variables to plot, in this case, 1.
- Click on the run button to start the plotter.
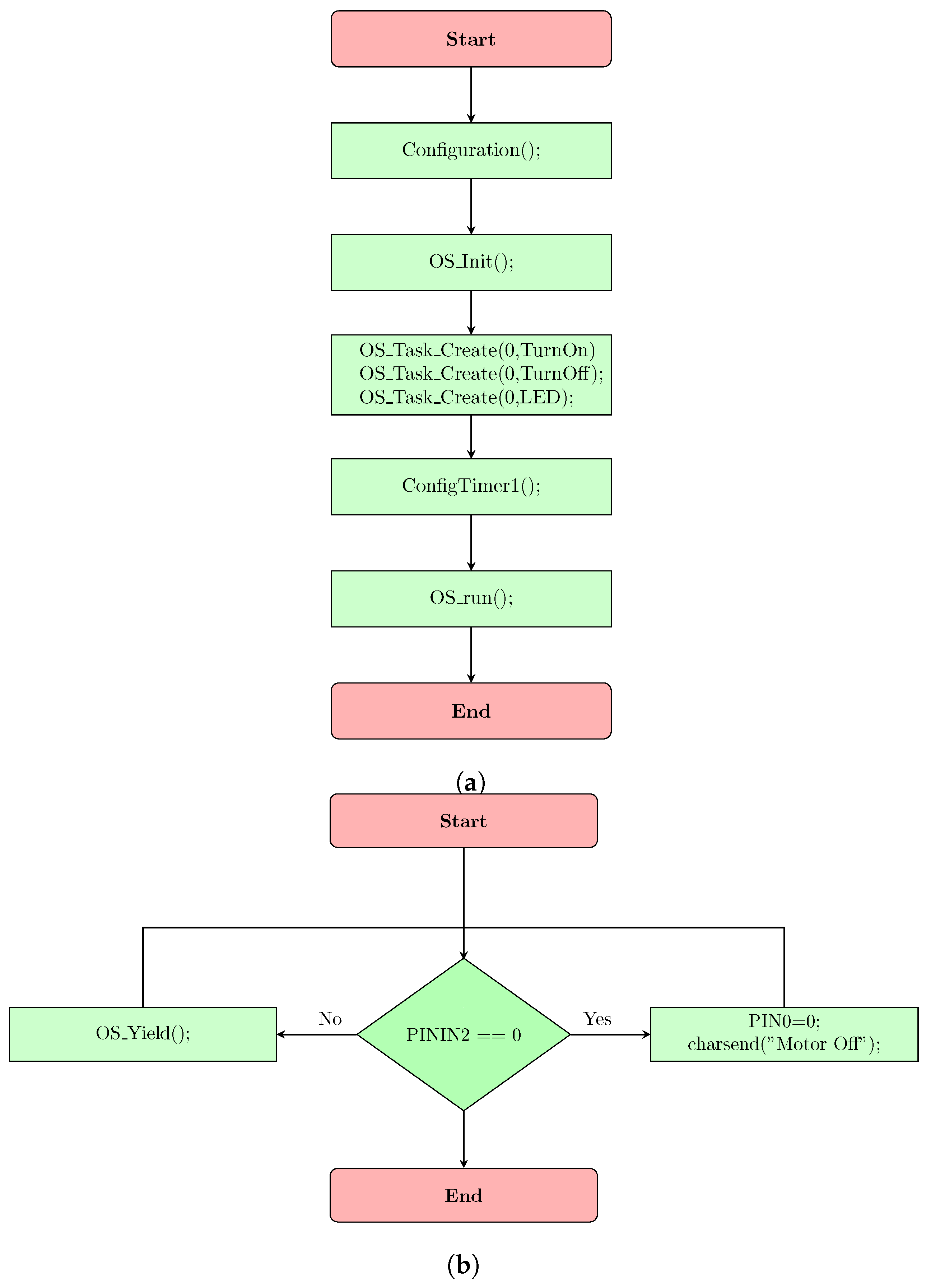
4.2. Example 2: RTOS
- Plug-in the development board to a PC. Configure the project in the application using the project wizard.
- Create the AV according to the specifications of a design. Indicate the name of the tasks for the RTOS (TurnOn, Turnoff). To use the RTOS, a Timer (1) interrupt must be configured.
- Program the development board with the AV built in Step 2.
- Debug the AV. Connect two switches with their respective pull-up resistors to inputs 2 and 3 of the development board. In addition, connect a relay and an AC contactor for the ACIM with their protections.
- Start and stop the ACIM. Test the message transmission on the serial port visor in the GUI of the platform.
5. Assessment
- Abstraction: In this stage, the class session was focused on theoretical aspects regarding the DSC’s architecture (registers, ports, peripherals, data bus, etc.) and the parameters such of the compiler XC16 as of MPLABX IDE.
- Design: The students developed an algorithm for a proposed problem, alternating between the text coding and the AVs. The algorithms required the usage of peripherals, ports, variables and loops, which are elements commonly used in the embedded systems area.
- Practice: The students implemented the designed algorithm in several proposed laboratories, typically, clustering industrial devices such as AC motors, AC contactors, relays and sensors.
- Arguing: The students explained the developed algorithms in their structure. For example, when the students configured a port or peripheral for certain design, they explained the configuration of the registers, loops, variables or functions involved in this operation.
6. Discussion
7. Conclusions and Further Work
Supplementary Materials
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Microchip Technology Inc. dsPIC ® Digital Signal Controllers The Best of Both Worlds. Available online: http://www.farnell.com/datasheets/133476.pdf (accessed on 24 July 2018).
- Aspencore. 2017 Embedded Markets Study. Available online: https://m.eet.com/media/1246048/2017-embedded-market-study.pdf (accessed on 28 July 2018).
- Clarke, J.; Connors, J.; Bruno, E.J. JavaFX: Developing Rich Internet Applications; Pearson Education: London, UK, 2009. [Google Scholar]
- Heckler, M.; Grunwald, G.; Pereda, J.; Phillips, S.; Dea, C. Javafx 8: Introduction by Example; Apress: New York, NY, USA, 2014. [Google Scholar]
- Microchip Technology Inc. dsPIC 33FJ128GP804 Datasheet. Available online: https://www.microchip.com/wwwproducts/en/dsPIC33FJ128GP804 (accessed on 31 July 2018).
- Microchip Technology Inc. dsPIC 33FJ128MC802 Datasheet. Available online: https://www.microchip.com/wwwproducts/en/dsPIC33FJ128MC802 (accessed on 31 July 2018).
- Microchip Technology Inc. dsPIC 33F Product Overview. Available online: https://cdn.sos.sk/productdata/fb/55/a9c85743/dspic33fj256gp710-i-pf.pdf (accessed on 31 July 2018).
- Törley, G. Algorithm visualization in teaching practice. Acta Didact. Napoc. 2014, 7, 1–17. [Google Scholar]
- Shaffer, C.A.; Cooper, M.L.; Alon, A.J.D.; Akbar, M.; Stewart, M.; Ponce, S.; Edwards, S.H. Algorithm visualization: The state of the field. ACM Trans. Comput. Educ. (TOCE) 2010, 10, 9. [Google Scholar] [CrossRef]
- Google LLC. Blockly Demo: Code. Available online: https://developers.google.com/blockly/ (accessed on 31 July 2018).
- Fraser, N. Ten things we’ve learned from Blockly. In Blocks and Beyond Workshop (Blocks and Beyond); IEEE Computer Society: Washington, DC, USA, 2015; pp. 49–50. [Google Scholar] [CrossRef]
- Microchip Technology Inc. MPLAB ® XC16 C Compiler User’s Guide. Available online: http://ww1.microchip.com/downloads/en/DeviceDoc/MPLAB%20XC16%20C%20Compiler%20Users%20Guide%20DS50002071.pdf (accessed on 28 July 2018).
- Ball, S.; Tenney, J. Xerte—A User-Friendly Tool for Creating Accessible Learning Objects. In International Conference on Computers for Handicapped Persons; Springer: Berlin/Heidelberg, Germany, 2008; pp. 291–294. [Google Scholar] [CrossRef]
- González, G.G. Xerte Online Toolklts Y El DiseÑo De Actividades Interactivas Para Fomentar La AutonomÍa De Aprendizaje en Ele. La Red Y Sus Aplicaciones en La EnseÑanza-Aprendizaje Del EspaÑol Como Lengua Extranjera. Asociación Para La EnseÑanza Del EspaÑol Como Lengua Extranjera, 2011; pp. 653–662. Available online: https://cvc.cervantes.es/ensenanza/biblioteca_ele/asele/pdf/22/22_0063.pdf (accessed on 17 August 2018).
- Hundhausen, C.D.; Douglas, S.A.; Stasko, J.T. A meta-study of algorithm visualization effectiveness. J. Vis. Lang. Comput. 2002, 13, 259–290. [Google Scholar] [CrossRef]
- Rößling, G.; Naps, T.L. Towards Improved Individual Support in Algorithm Visualization. In Proceedings of the Second International Program Visualization Workshop, Århus, Denmark, 22–24 November 2002; pp. 125–130. [Google Scholar]
- Pasternak, E.; Fenichel, R.; Marshall, A.N. Tips for creating a block language with blockly. In Proceedings of the Blocks and Beyond Workshop (B&B), Raleigh, NC, USA, 9–10 October 2017; pp. 21–24. [Google Scholar] [CrossRef]
- Weintrop, D.; Shepherd, D.C.; Francis, P.; Franklin, D. Blockly goes to work: Block-based programming for industrial robots. In Proceedings of the Blocks and Beyond Workshop (B&B), Raleigh, NC, USA, 9–10 October 2017; pp. 21–24. [Google Scholar] [CrossRef]
- Angulo, I.; García-Zubía, J.; Hernández-Jayo, U.; Uriarte, I.; Rodríguez-Gil, L.; Orduña, P.; Pieper, G.M. RoboBlock: A remote lab for robotics and visual programming. In Proceedings of the Experiment@ International Conference (exp. at’17), Faro, Portugal, 6–8 June 2017; pp. 109–110. [Google Scholar] [CrossRef]
- Serna, M.; Sreenan, C.J.; Fedor, S. A visual programming framework for wireless sensor networks in smart home applications. In Proceedings of the International Conference on Intelligent Sensors, Sensor Networks and Information Processing, Singapore, 7–9 April 2015. [Google Scholar] [CrossRef]
- Ariza, J.A. Controlly: Open source platform for learning and teaching control systems. In Proceedings of the 2015 IEEE 2nd Colombian Conference on Automatic Control (CCAC), Manizales, Colombia, 14–16 October 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Galán, D.; de la Torre, L.; Dormido, S.; Heradio, R.; Esquembre, F. Blockly experiments for EjsS laboratories. In Proceedings of the Experiment@ International Conference (exp. at’17), Faro, Portugal, 6–8 June 2017; pp. 139–140. [Google Scholar] [CrossRef]
- Bak, N.; Chang, B.; Choi, K. Smart Block: A Visual Programming Environment for SmartThings. In Proceedings of the 2018 IEEE 42nd Annual Computer Software and Applications Conference (COMPSAC), Tokyo, Japan, 23–27 July 2018; Volume 2, pp. 32–37. [Google Scholar] [CrossRef]
- Khamphroo, M.; Kwankeo, N.; Kaemarungsi, K.; Fukawa, K. MicroPython-based educational mobile robot for computer coding learning. In Proceedings of the 2017 8th International Conference of Information and Communication Technology for Embedded Systems (IC-ICTES), Chonburi, Thailand, 7–9 May 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Marron, A.; Weiss, G.; Wiener, G. A decentralized approach for programming interactive applications with javascript and blockly. In Proceedings of the 2nd Edition on Programming Systems, Languages and Applications Based on Actors, Agents, and Decentralized Control Abstractions, Tucson, AZ, USA, 21–22 October 2012; pp. 59–70. [Google Scholar]
- Matsuzawa, Y.; Tanaka, Y.; Sakai, S. Measuring an impact of block-based language in introductory programming. In International Conference on Stakeholders and Information Technology in Education; Springer: Berlin/Heidelberg, Germany, 2016; pp. 16–25. [Google Scholar] [CrossRef]
- Chtourou, S.; Kharrat, M.; Ben Amor, N.; Jallouli, M.; Abid, M. Using IOIOAI in introductory courses to embedded systems for engineering students: A case study. Int. J. Electr. Eng. Educ. 2018, 55, 62–78. [Google Scholar] [CrossRef]
- Microchip Technology Inc. USB CDC Class on an Embedded Device. Available online: http://www.t-es-t.hu/download/microchip/an1164a.pdf (accessed on 2 August 2018).
- Microchip Technology Inc. MCP4822 Datasheet. Available online: https://people.ece.cornell.edu/land/courses/ece4760/labs/f2015/lab2_mcp4822.pdf (accessed on 3 August 2018).
- RTOS. What Is OSA? Available online: http://wiki.pic24.ru/doku.php/en/osa/ref/introduction/intro (accessed on 7 August 2018).
- Heath, S. Embedded Systems Design; Elsevier: Amsterdam, The Netherlands, 2002. [Google Scholar]
- Di Jasio, L. Programming 16-Bit PIC Microcontrollers in C: Learning to Fly the PIC 24; Elsevier: Amsterdam, The Netherlands, 2007. [Google Scholar]
- Sain, M.; Lee, H.; Chung, W. MUHIS: A Middleware approach Using LiveGraph. In Proceedings of the 2009 International Multimedia, Signal Processing and Communication Technologies, Aligarh, India, 14–16 March 2009; pp. 197–200. [Google Scholar] [CrossRef]
- Paperin, G. LiveGraph Summary. Available online: https://sourceforge.net/projects/live-graph/ (accessed on 9 August 2018).
- Oracle Corporation. WebView JavaDoc. Class WebView. Available online: https://docs.oracle.com/javase/8/javafx/api/javafx/scene/web/WebView.html (accessed on 9 September 2018).
- Oracle Corporation. WebEngine JavaDoc. Class WebEngine. Available online: https://docs.oracle.com/javase/8/javafx/api/javafx/scene/web/WebEngine.html (accessed on 9 September 2018).
- Oracle Corporation. JavaFX Scene Builder 2.0. Available online: https://www.oracle.com/technetwork/java/javase/downloads/sb2download-2177776.html (accessed on 28 July 2018).
- Mozilla Foundation. Ace Code Editor. Available online: https://ace.c9.io/ (accessed on 9 September 2018).
- Gustavsson, M. ds30 Loader. Available online: https://www.ds30loader.com/ (accessed on 28 July 2018).
- jSSC (Java Simple Serial Connector). Available online: https://code.google.com/archive/p/java-simple-serial-connector/ (accessed on 28 August 2018).
- Microchip Technology Inc. Pickit3 Datasheet. Available online: https://ww1.microchip.com/downloads/en/DeviceDoc/51795B.pdf (accessed on 12 October 2018).
- Microchip Technology Inc. ICD3 Datasheet. Available online: http://ww1.microchip.com/downloads/en/DeviceDoc/50002081B.pdf (accessed on 12 October 2018).
- Jiri Sedlacek, T.H. VisualVM: All-in-One Java Troubleshooting Tool. Available online: https://visualvm.github.io/index.html (accessed on 10 October 2018).
- Microchip Technology Inc. MCP6004 Datasheet. Available online: http://ww1.microchip.com/downloads/en/DeviceDoc/21733j.pdf (accessed on 28 August 2018).
- Instruments, T. LM2576 Voltage Regulator Datasheet. Available online: http://www.ti.com/lit/ds/symlink/lm2576.pdf (accessed on 28 August 2018).
- FTDI Chip. FT232RL Datasheet. Available online: https://www.ftdichip.com/Support/Documents/DataSheets/ICs/DS_FT232R.pdf (accessed on 28 July 2018).
- Microchip Technology Inc. MPLABX IDE. Available online: https://www.microchip.com/mplab/mplab-x-ide (accessed on 10 October 2018).
- Ray, P.P.; Rai, R. Open Source Hardware: An Introductory Approach; Lap Lambert: Saarbrücken, Germany, 2013. [Google Scholar]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Description | Block Example |
|---|---|---|
| Oscillator | Set-up for the (FRC) oscillator. Range (0 < ≤ 40 MHz) Parameters: Values of N1, N2, M (See datasheets dsPIC 33FJ128GP804 and dsPIC 33FJ128MC802). |  |
| Input–Output (I/O) | High Pin: Write a logical 1 on selected pin. Low Pin: Write a logical 0 on selected pin. ReadPin: Read the state of a pin. Parameters: Pin number (1–6). |  |
| Peripherals | ADC Single Channel: Read an ADC value. Parameters: ADC channel number (0–5). ADC multiple channels: Sample several ADC channels simultaneously. Parameters: Sample time in (ms). PWM Output: Configure the selected PWM Channel. Parameters: Duty Cycle; PWM frequency(Hz); Pre-scale (1,8,64,256); PWM Channel (0–4). DAC Channel A,B: Configure the 12-bit Digital to Analog Converter (DAC) MCP4822 [29] through SPI protocol. Parameters: Channel (A,B); Digital value to convert in analog (scale 0 to 3.3 V). |  |
| Communications | UART Send Integer: Send an integer value to UART peripheral. Parameters: Integer number. UART Write Text: Write a string to UART peripheral. Parameters: Text String. UART Write Float: Write a float number to UART peripheral. Parameters: Float number. |  |
| Category | Description | Block Example |
|---|---|---|
| Communications | ReadUart: Read a byte from UART peripheral Parameters: None. DataRdyUART: Check if a byte is available in the UART peripheral. Parameters: None. |  |
| RTOS | OS Init: Start the RTOS. Parameters: None. OS Yield: Free the current task executed in the RTOS. Parameters: None. OS Timer: Start the Timer for the RTOS. Parameters: None. OS Task Create: Create a task with priority. Parameters: Priority (0–7); Task name. OS Delay: Create a configurable delay for a task. Parameters: Ticks or cycles for the delay. |  |
| Interrupts | Timer interrupt: Configure a Timer interrupt with priority and pre-scale. Parameters: Timer number (0–5); Pre-scale (1,8,64,256); Elapsed time in milliseconds (ms); Priority (0–7). |  |
| Delay | Delay (ms): Delay in ms. Parameters: Time in ms. Delay (μs): Delay in microseconds (μs). Parameters: Time in (μs). NOP: NOP instruction. Parameters: None. Delay in cycle: Delay in instruction cycles. Parameters: Number of instruction cycles for the delay. |  |
| Functions | Function without parameter to return: Create a function without a return parameter. Parameters: Invoking variables. Function with parameter to return: Create a function with a return parameter. Parameters: Return variable and invoking parameters. |  |
| Name | Type (File or Folder) | Description |
|---|---|---|
| OSA | Folder | It contains the files (.c, .h) for the RTOS (OSA). |
| User.h | File | Header file to configure, read and write the UART peripheral. |
| User.c | File | It contains the implementation of the functions to configure, read and write the UART peripheral. |
| Data.csv | File | File with the user’s plotter data. |
| Hardwareprofile.h | File | Header file with the pin-out definitions for the development board. |
| File Name | Description |
|---|---|
| ds30loader.s | It contains the assembler implementation for the bootloader. |
| devices.inc | It defines the memory size for the bootloader in words and pages according to the selected device. |
| settings.inc | It indicates the DSC’s reference, the configuration bits (fuses) and the UART’s baud rate. |
| uart.inc | It describes the configuration for the UART’s registers. |
| user code.inc | It configures the remappable pins for the UART and the oscillator settings so as to start-up the DSC. |
| Feature | Description |
|---|---|
| Application size in disc | 161 (MB) |
| Average Heap size (Java) | 22 (MB) of 100 (MB) assigned. |
| Peak CPU usage | 31% |
| Programming language | Java (JavaFX 8) |
| Question | Answers |
|---|---|
| 1. In a scale of 1 to 10, assess the technical functioning of the platform. | |
| 2. With the graphical blocks, did you understand in a better way the concepts involved in the DSCs? | Yes (100%), No (0%) |
| 3. What element do you consider most relevant in the platform? |
|
| 4. Did the platform help you in the way that you understand an algorithm? | Yes (100%), No (0%) |
| 5. Were learning materials pertinent to your needs in the embedded systems area? | Yes (100%), No (0%) |
| 6. Would you employ the platform in your own designs into academic and work contexts? | Yes (100%), No (0%) |
© 2019 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Álvarez Ariza, J. DSCBlocks: An Open-Source Platform for Learning Embedded Systems Based on Algorithm Visualizations and Digital Signal Controllers. Electronics 2019, 8, 228. https://doi.org/10.3390/electronics8020228
Álvarez Ariza J. DSCBlocks: An Open-Source Platform for Learning Embedded Systems Based on Algorithm Visualizations and Digital Signal Controllers. Electronics. 2019; 8(2):228. https://doi.org/10.3390/electronics8020228
Chicago/Turabian StyleÁlvarez Ariza, Jonathan. 2019. "DSCBlocks: An Open-Source Platform for Learning Embedded Systems Based on Algorithm Visualizations and Digital Signal Controllers" Electronics 8, no. 2: 228. https://doi.org/10.3390/electronics8020228