1. Introduction
A great effort is being carried out to increase safety in the traffic environment through inter-vehicle communication. It is expected that vehicle safety applications will rely on communication capabilities for information gathering beyond their immediate environment and line-of-sight vision and for sharing the necessary safety information [
1]. In this context, the position of vehicles rather than their identity is relevant, as vehicles share their actual positions and anticipated trajectories, their cooperative merging maneuvers among sideways neighbors [
2], instantly notify the vehicle traveling behind of a braking action [
3] or warn oncoming traffic [
4] of an icy patch [
5].
The key to supporting this communication technique is the geolocation and tracking of the vehicles (nodes) that are circulating in the proximity of each node of the network. The core of these systems is based on the combination of two key elements to manage the effective information flow among an apparently random distribution of network nodes: routing algorithms and GPS positioning. The routing algorithms manage the logical structure of the wireless vehicular network, selecting the best route to transmit messages from one or more receivers and dealing with the addition and removal of network nodes. There are two main routing structures considered in a vehicular network, also known as geo-routing. The first is the structure that supports unicast (GeoUnicast) communication; that is, the transmission of data from an emitter to a specific receiver, directly or indirectly, using multiple nodes as intermediaries. The second structure supports broadcast (geo-broadcast) communication; that is, the transmission of data from an emitter to every receiver that is located in a specific geographical region.
However, in order to guarantee a massive impact of this technology on the vehicular environment, the necessary standards need to be developed to guarantee the right interoperability and performance, regardless of the manufacturer. Therefore, a number of working groups within the European Telecommunications Standards Institute (ETSI) initiated the geo-networking specification and family of standards [
6], which are currently under deployment to support geo-networking in vehicular environments [
7].
Nevertheless, the implementation of this philosophy is presently in an initial stage, where these available developments are based on the IEEE 802.11p (dedicated short range communications (DSRC)) [
8] standard, radio modem, WiFi or cellular. Several research projects are being conducted towards the adaptation of IPv6 protocols to support vehicular communications, including geographical routing [
9,
10], but efficient routing algorithms that guarantee the network performance and stability are still an open research area. An alternative is the application of communication systems oriented to wireless sensor networks (WSN) based on IEEE 802.15.4, where some experience in geo-networking has been reported, but mainly focused towards a static physical infrastructure of the network, with minimum mobility [
11,
12,
13,
14].
In fact, due to the limited availability of devices that support geo-networking protocols and the inherent difficulties in developing field trials, the usual testing of protocols and hardware has been carried out through simulations [
15].
Several research projects are being conducted towards the adaptation of IPv6 protocols to support vehicular communications, including geographical routing [
9,
10], but efficient routing algorithms that guarantee the network performance and stability are still an open research area. In fact, some of the proposed solutions have been designed to run offline, with a complex installation in online devices [
16,
17].
Many broadcast protocols [
18,
19,
20,
21] have been proposed to alleviate the broadcast network saturation at a high packet delivery rate, reducing unnecessary rebroadcasts. In [
18], an enhancement of multihop vehicular broadcast is proposed, but focusing on improvements in processing and packet retransmissions, where the nodes forward only as a function of the relative position of the sender. The work of [
19] proposes a directional antennas and distance-based broadcast protocol, which is not efficient in real traffic situations. In [
20], a vehicular broadcast protocol is presented, whose main novelty is the selection of the forwarder nodes using an opportunistic selection in order to reduce the network saturation. The authors of [
21] solve some limitations of the existing broadcast protocols, but using information of the transmission range of the nodes, which depends on the status of the interferences and other factors.
However, this is still an open research field, with specific parameters from the transportation field that may influence the network behavior, like vehicle density, transmission range, length of target region and lifetime of a message [
22]. Having detected a possible weakness in the algorithm of ETSI and that in the multiple papers [
23,
24,
25] in which the ETSI algorithm is used, we opted to develop a new algorithm to solve the problems identified.
In this paper, we present some results of the iVANET project (Mesh Communications for Intelligent Vehicles and Infrastructures) that is under development at the Technical University of Madrid, where WSN technology is used as a basis to implement VANETs and test them in real traffic circulation situations in order to validate the feasibility of this technology to be used as a testbed for vehicular communication systems. In the first step of this project, the technology was tested in controlled and urban traffic situations [
26]. In the second step, these systems were validated on public highways [
15]. In the third step, the necessary standards and novel routing algorithms were applied to the developed vehicular communication systems to support GeoUnicast, testing them in real situations with real vehicles, the preliminary results being shown in [
27]. Finally, in this paper, geo-broadcast algorithms to support vehicular communications are presented, including field tests and simulations to verify the right functionality of the developed systems, as well as the differences with the default algorithms defined in the standard.
2. Experimental Equipment
In order to test the geo-networking algorithms for vehicular communications, the IEEE 802.15.4 communication protocol and Maxfor Inc. (Bundang, Korea) MTM-CM3100 devices were used, based on the TelosB platform. These devices are wireless sensor network-supporting hardware, extended to support GPS positioning and geo-broadcast algorithms. This allows connectivity with any computer platform and acts as a gateway to access the vehicular network. This device uses TinyOS (TinyOS 2.0 Core Working Group: Stanford, CA, USA) as the operating system, a reduced version of Linux for embedded systems, like TelosB platforms. TinyOS is an open code operative system and allows personalizing its features and adapting applications in accordance with the necessities of the developers. In order to access the wireless network at 2.4 GHz, it uses the IEEE 802.15.4 standard at the physical and link levels, which guarantees the desired functionality of the VANET at transmission rates of up to 250 Kbps and in a range of 100 m. Important features of IEEE 802.15.4 include real-time suitability by reservation of guaranteed time slots, collision avoidance through CSMA/CA and integrated support for secure communications.
The novel geo-broadcast protocol is a network protocol that resides jointly in the network and transport layer [
6] and is executed in each gateway. This protocol is the manager to allow or not the dissemination of the broadcast packets that each node receives in accordance with the GPS position of the network nodes.
With this technology, it is possible to develop the necessary algorithms to optimize message routing in V2V communications. This algorithm can be used as a solution to be applied to other specifically designed vehicular communication technologies when available.
The MTM-CM3100 is configured to act as a broadcasting node by modifying the internal algorithms and the default protocol stack, connected to a computer, where the data received is saved. Each computer is also connected to a GPS receiver and to the CAN bus of each testbed vehicle in order to retrieve the vehicle data in real time.
Three communication nodes were used in the field experiments, which included one GPS receiver each and a CAN bus connection. It should be noted that it is possible to acquire speed using GPS receivers. However, we obtained speed from the vehicle CAN bus in order to be able to perform the experiments from standard equipment.
3. Geo-Broadcast Algorithm
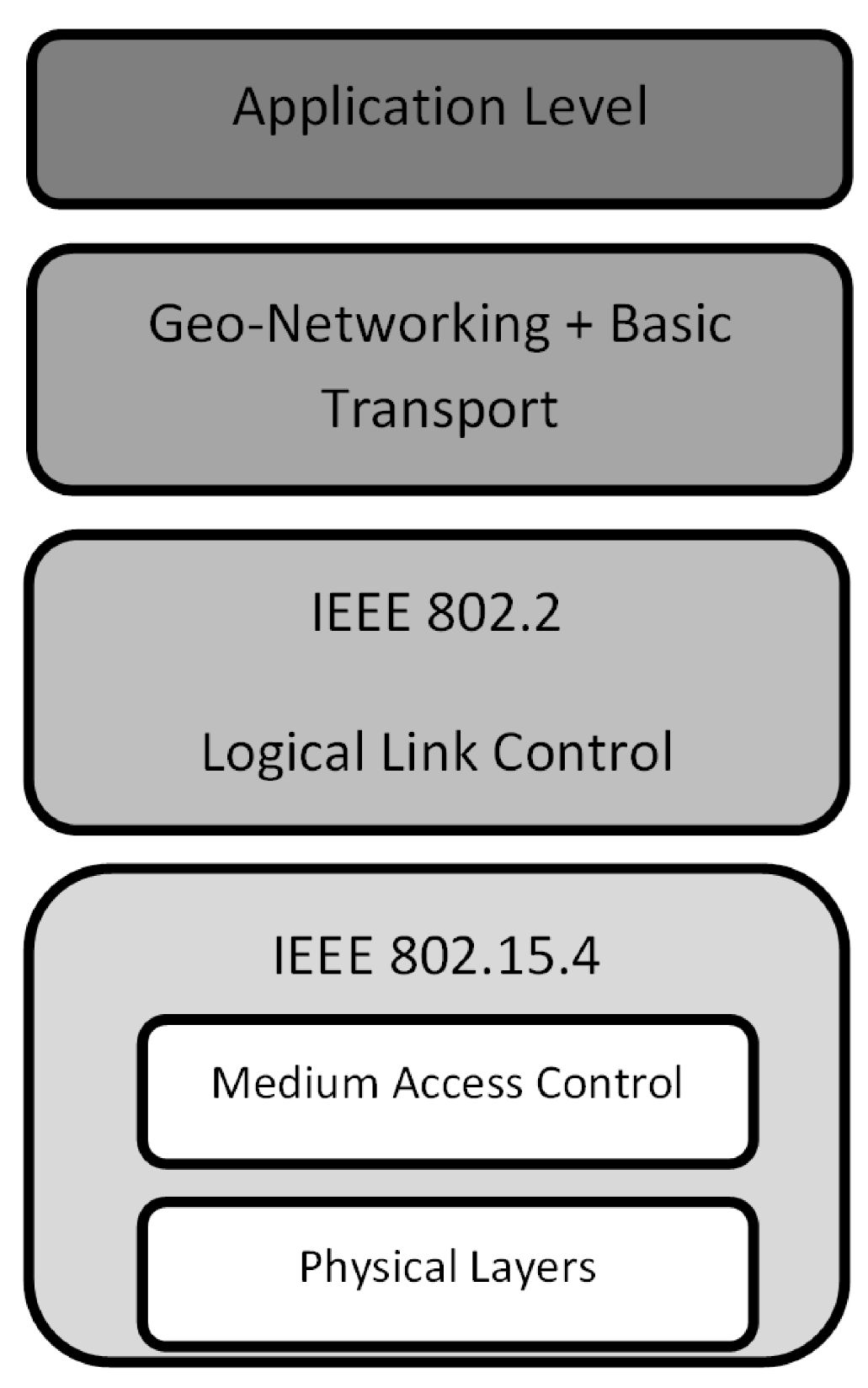
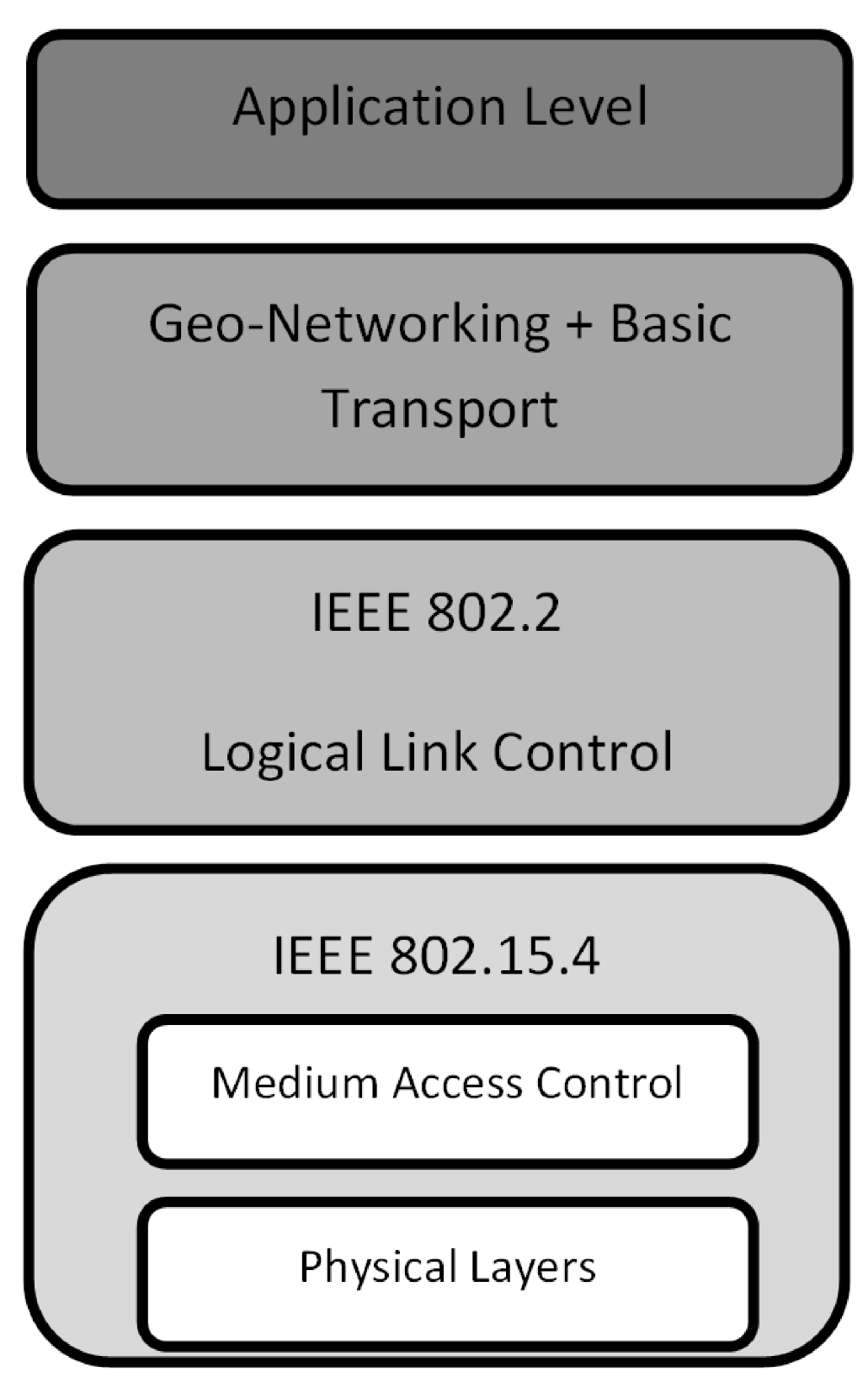
The International Organization for Standardization’s (ISO) standard Open System Interconnection reference model stack [
28] has been modified in order to include the geo-networking functionality by adapting the transport and network levels, as shown in
Figure 1.
Figure 1.
Modification of the ISO model stack for geo-networking.
Figure 1.
Modification of the ISO model stack for geo-networking.
The core of the geo-networking is the geo-broadcast algorithm that runs at the network level of the ISO model stack, in charge of the logical addressing and the route determination. The main difficulty when defining a broadcast algorithm is the uncontrolled repetition of data packets that can generate loops, duplicate packets and reduce the efficiency of the network. The application in the vehicular environment also enables the need to guarantee that the communications are transparent to the configuration of the network. That is, the data flow must be assured to every node in a determined geographical range regardless of the structure of the network, the routes followed by the packets and the positions of the vehicles.
The devices have a range of 100 m near emission. This range may be appropriate or not according to traffic conditions. For example, in urban traffic, it is a sufficient retransmission distance; however, at an average speed of 60 km/h (16 m/s), other vehicles from outside of the range of the 100 m of each vehicle must be able to receive safety data. The solution is to propagate the messages in a multihop behavior in order to cover the necessary safety range, and the geo-broadcast algorithm assures efficient data flow in this range.
Therefore, the philosophy of a generic geo-broadcast algorithm is that each node receives every message emitted in the reception range, and then, it decides whether to attend or ignore the message, in accordance with a series of parameters.
In the novel algorithm presented in this paper, we have designed a new method to avoid the saturation of the network by avoiding duplicated and uncontrolled message forwarding in accordance with the circulation speed of the receiving node (vehicle).
To avoid the saturation of the network, we have adopted two different and complementary strategies instead of limiting the messages to a certain number of hops, which is the common geographic and temporal strategy, as well as to avoid resending broadcast algorithms. Both strategies have been chosen to limit the forwarding of duplicated messages.
The first strategy is to avoid duplicate message forwarding. In each node, there is a register of forwarded messages with the identifier of the sender and the timestamp of the newer message of this sender, named the neighbor table (NT). When a new message is received, the identification of the origin node and timestamp of emission is analyzed. If this timestamp is earlier than the last record or the message is discontinued, that message is discarded.
The second strategy is to avoid uncontrolled packet forwarding by limiting the geo-broadcast retransmission area in accordance with a parameter. This retransmission area, or area of influence, is defined in accordance with the circulation speed of each node in order to adapt the network features according to the traffic flow and to improve the efficiency of the data distribution. Then, a variable named “range of rebroadcasting” of a receiving node i (RRBi) was defined (Equation (1)) in order to determine the forwarding area of each node, where S represents the speed of the vehicle, RT, the reaction time of the driver (1 s) and SD represents the distance required to stop the vehicle in an emergency stop.
The selection of this metric assures that, in the event of an emergency message that requires an emergency stop, the vehicle has enough space to brake safely and avoid an accident.
If a sender node is at a lower distance from node i than RRBi, its data packets will be forwarded by the receiving node i. In any other case, node i discards the incoming message from this node.
With this strategy, we extend the range of message dissemination in an area that depends on the speed of the nodes. The maximum range for each node i is defined by Equation (2).
where
di,n represents the distance between the origin node (
i) and the farthest node (
n) and
Rn represents the range of transmission of this farthest node.
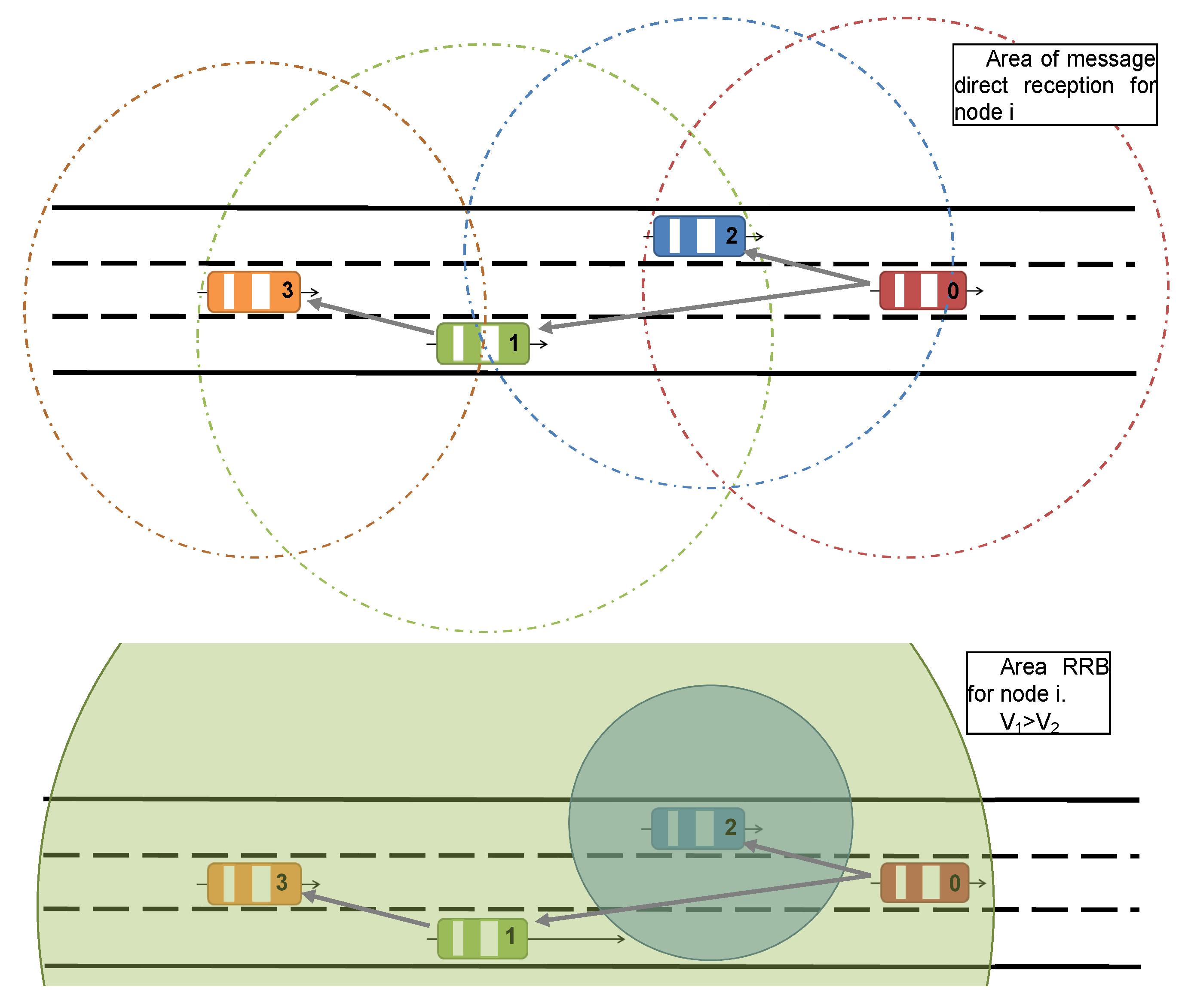
Therefore, the RRB limits the uncontrolled dissemination of messages across the network. This concept is shown in
Figure 2, where the top schema represents the transmission range of each node and the second schema represents the RRB range of the first two receiving nodes from the origin.
Figure 2 at the top shows that the distance between Vehicle 0 (V0) and Vehicle 3 (V3) is greater than the range of Vehicle 0 (R0), and the speed of Vehicle 1 (V1) is higher than the speed of Vehicle 2 (V2). However, there is a need for data transmission between both extreme vehicles. The proposed algorithm manages the network data multihop broadcast in accordance with the RRB parameter. Then, the message from Vehicle 0 to Vehicle 3 is directly received by Vehicles 1 and 2, but only Vehicle 1 resends the message to 3, because the distance between Vehicles 0 and 1 is less than the RRB
1. On the contrary, Vehicle 2 does not resend the message due to its RRB
2 being less than the distance between Vehicles 0 and 2.
Figure 2.
Graphical description of the “range of rebroadcasting” (RRB) concept.
Figure 2.
Graphical description of the “range of rebroadcasting” (RRB) concept.
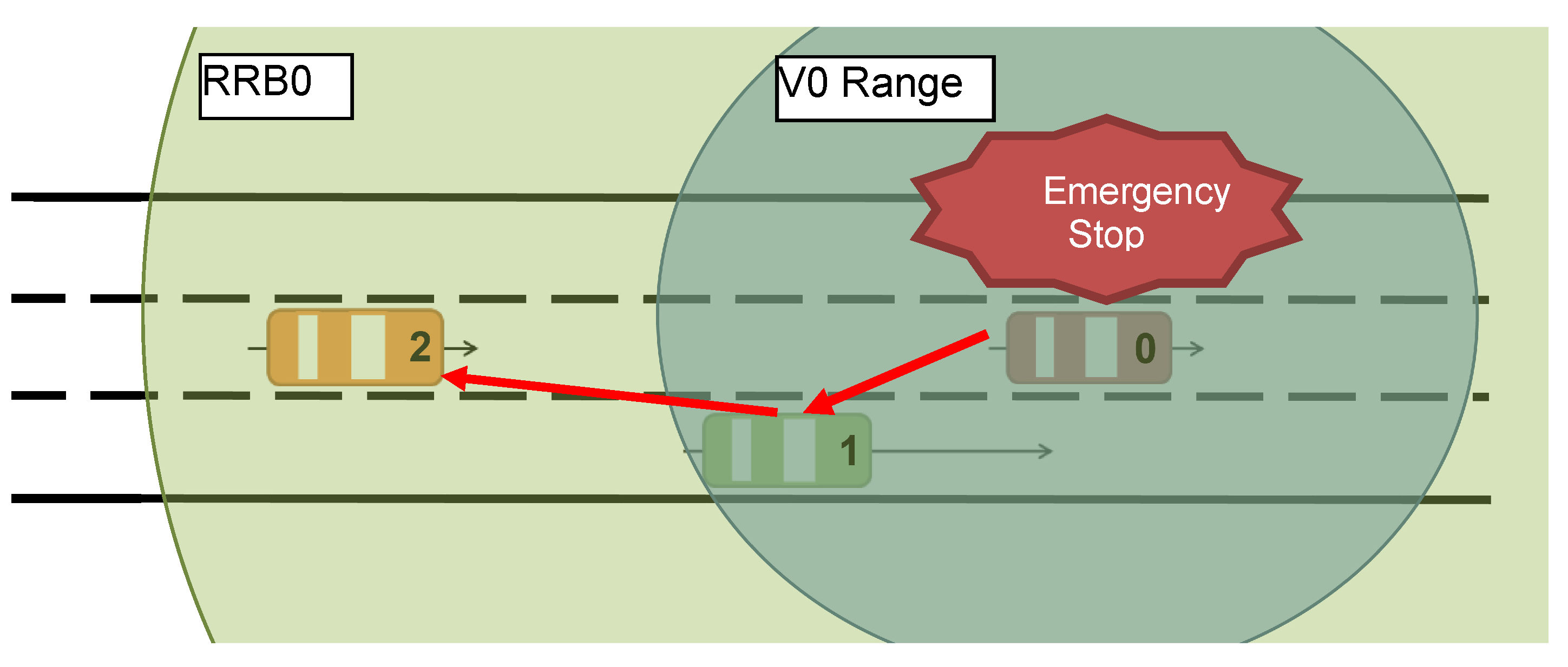
Figure 3 illustrates an example of the range of rebroadcasting concept, in an emergency stop situation. In this case, Vehicle 0 (V0) circulates at a speed of 100 km/h (3.6 m/s) and starts an emergency stop, with a deceleration of −10 m/s
2. In this case, the value of RRB
0 is 63.45 m. On the contrary, the range of this vehicle is 30 m. This means that some hops are necessary in order for the emergency messages emitted from V0 to reach any vehicle that circulates in the RRB
0 area. In the case of
Figure 3, one vehicle (V1) circulates in the V0 range and re-broadcasts the emergency stop message to the other vehicles in its range (V2).
Figure 3.
Example of geo-broadcast message flow in an emergency situation. V0, Vehicle 0.
Figure 3.
Example of geo-broadcast message flow in an emergency situation. V0, Vehicle 0.
3.1. Data Packets
In order to support the data transmission and the geo-broadcast network organization, only one data packet has been defined, shown in
Table 1. This data packet is based on the IEEE 802.15.4 standard WSN frame, where the PHY (physical layer of the OSI model) header includes a preamble, a start packet delimiter and the packet payload length. On the other hand, the MAC (Medium Access Control Layer of the OSI model) header includes a frame control, the frame sequence number, the destination WSN ID, the destination MAC address, the source WSN ID and the source MAC address.
Table 1.
Geo-broadcast data packet.
Table 1.
Geo-broadcast data packet.
| Field | PHY Header | MAC Header | Geo-broadcast Header | Payload | MAC Footer |
|---|
| Length | 6 bytes | 10 bytes | 27 bytes | 0–205 bytes | 2 bytes |
The PHY and MAC headers and the MAC footer are standard, and the payload is defined in accordance with the destination application. The geo-broadcast header is defined in
Table 2 and contains the necessary information to support the algorithm performance.
Table 2.
Geo-broadcast header. Fr, header start and finish byte; PT, protocol type; Sq, sequence number; Dst, destination node; Org, origin node; Ln, length;
Table 2.
Geo-broadcast header. Fr, header start and finish byte; PT, protocol type; Sq, sequence number; Dst, destination node; Org, origin node; Ln, length;
| Byte | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11–25 | 26 | 27 | 28 |
|---|
| Name | Fr | PT | Sq | PF | Dst | Org | Ln | Gr | AM | GeoData | CRC | Fr |
Fr is the header start and finish byte (7Eh). PT is the protocol type and indicates if the message source is the local node or has been received from the radio. Sq is the sequence number of the packet. Dst and Org represent the identification of the destination node and the origin node, respectively, at the application level, defined by the user of the front end applications. They represent the identifiers of the network nodes at the application level. The standard size for the IEEE 802.15.4 WSN IDs is two bytes in order to reduce the size of the data packets. Ln indicates the length of the data field, Gr is the Group of the origin, and AM (Active Message) represents the type of message (geo-broadcast). Finally, the GeoData field (
Table 3) contains the necessary geospatial and navigation information to support the algorithm.
Table 3.
GeoData field. UTM_N, north UTM coordinates; UTM_E, east UTM coordinates; BZ, UTM band and zone; Ang, azimuth angle; TST, timestamp.
Table 3.
GeoData field. UTM_N, north UTM coordinates; UTM_E, east UTM coordinates; BZ, UTM band and zone; Ang, azimuth angle; TST, timestamp.
| Byte | 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 | 19 | 20 | 21 | 22 | 23 | 24 | 25 |
|---|
| Name | Type | ID | UTM_N | UTM_E | BZ | Speed | Ang | TST | Sum |
Type indicates if the emitter node is the origin of the packet or only the forwarder. ID source is an identification of the node source of the packet. UTM_N and UTM_E represent the north and east UTM coordinates of the origin of the packet. BZ is the UTM band and zone. Speed represents the circulation speed of the node. Ang is the azimuth angle of the trajectory of the node. TST is a timestamp (mm:ss,d), and Sum is a data control field.
3.2. Algorithm Description
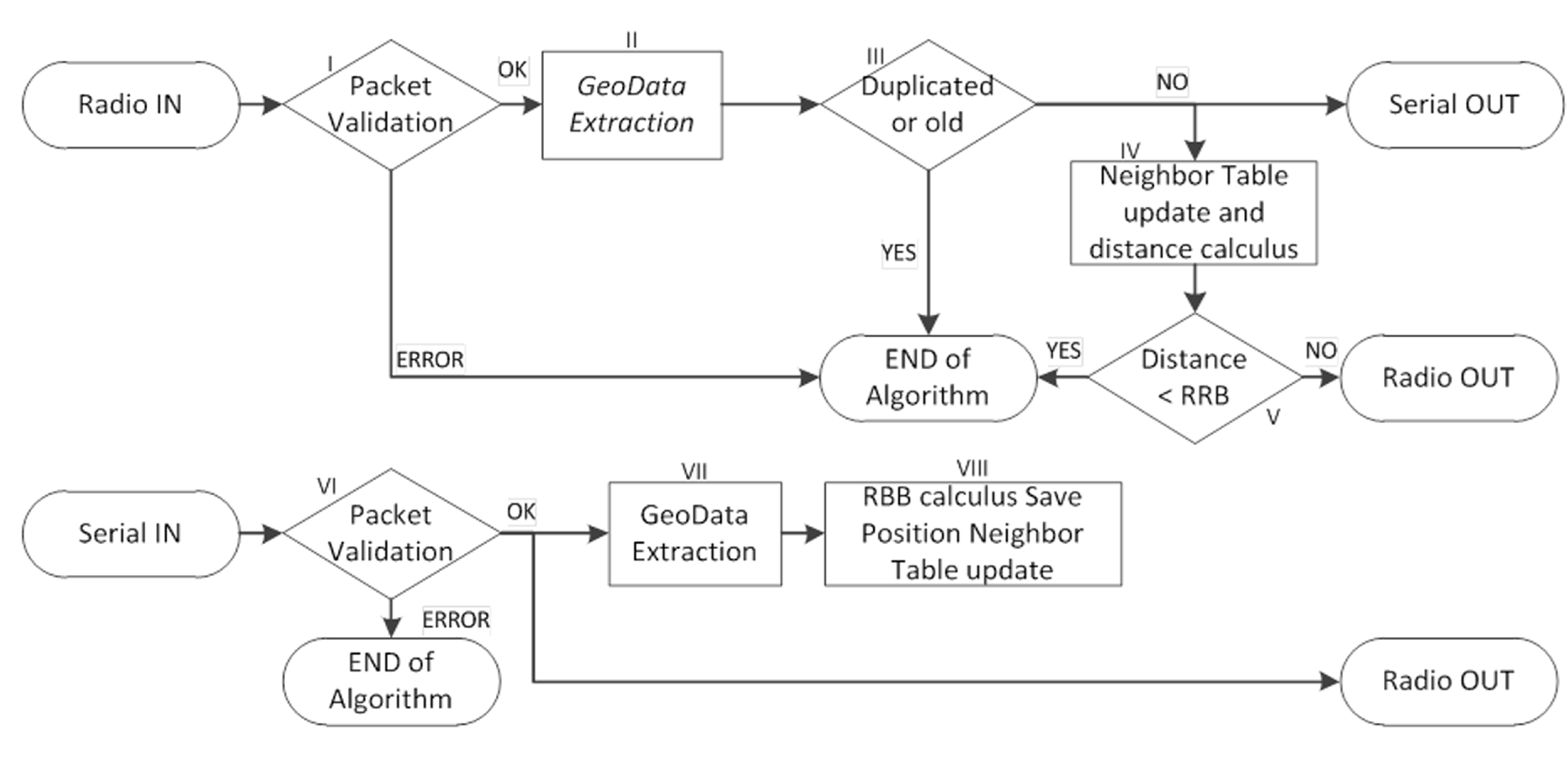
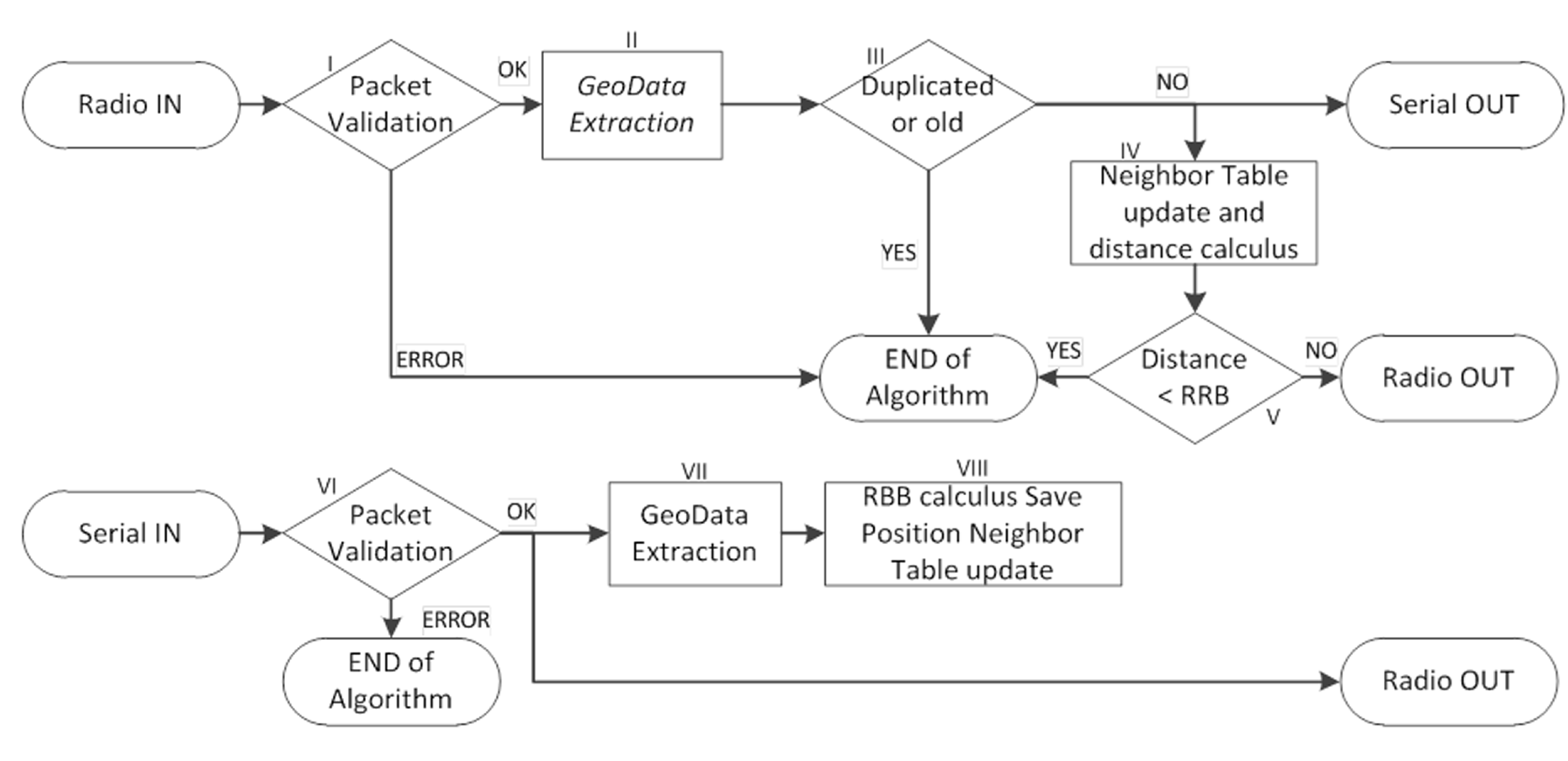
Figure 4 contains the flowchart of the geo-broadcast algorithm, described in detail next. When a new data packet is generated by a node
i, it is analyzed; the geoinformation is extracted and saved. With this data, the RBBi is calculated. Once the calculation has been made, the geo-routing headers are added to the data packet, which is then sent to the vehicular network through the radio.
When data is received from the vehicular network, the geodata headers are extracted. With this information, the node checks whether the package has already been forwarded or is discontinued. If the data packet fulfills the requirements (new data packet), the payload is sent to the computer and the neighbor table (NT) is updated. To update the NT, the node checks if the node exists in the NT. In the affirmative case, the data is updated, and in the negative case, the node is included in the NT. If the NT is full, the oldest neighbor is replaced by the new node. Finally, the distance between the nodes is calculated, and if the distance is less than RRBi, the data packet is forwarded through the vehicular network.
Figure 4.
Flowchart of the broadcast algorithm.
Figure 4.
Flowchart of the broadcast algorithm.
3.3. Step by Step
Described below is the performance of the algorithm in pseudo code, following the schema of
Figure 1.
- i
Reception of a packet via radio, checking its format.
- ii
The geoinformation is extracted: position and timestamp.
- iii
Check timestamp to verify that the packet has not already been forwarded or it is updated.
If true, two actions are executed: the packet is sent through the serial port to notify the PC and the packet is transmitted to step IV.
If not: the packet is discarded and data packet analysis is ended.
- iv
The distance is calculated between transmitter and receiver node i. Update the neighbor table.
- v
Check if the distance between nodes is less than
RRBi.
- vi
Reception of a packet via serial port, checking its format.
- vii
The geoinformation is extracted: position and timestamp.
- viii
The RRBi is calculated with the speed of the vehicle, i. The position of the node is read to allow the calculation of the distances, and the NT is checked to eliminate discontinued nodes.
4. Comparison with Other Algorithms
IEEE 802.11p defines the physical and link layer protocols for the communication devices of vehicular communications, the basis for the dedicated short range communications (DSRC). The ETSI TS 102 626-4-1 protocol family defines the geo-networking algorithms to be applied in vehicular communications DSRC, operating in the network and transport layer. These algorithms include GeoUnicast and geo-broadcast.
The main difference between the IEEE 802.11p standard with ETSI TS 102 636-4-1 and the presented algorithm is the philosophy of the entity in charge of deciding if a message is forwarded.
In ETSI TS 102 636-4-1, each node forwards the received packets with the only condition that the node is in the broadcast area. This reception area is defined in accordance with a central point and a radius, but without considering the circulation speed or the traffic status. The validity of the message is calculated according to the number of hops and the value of the “lifetime” timestamp parameter. The calculus of the optimum number of hops is difficult with the information managed with the algorithm, since no traffic status considerations are taken into account, raising the possibility of network saturation.
In the proposed algorithm, the reception area is defined in accordance with the speed and some safety parameters. This means that the broadcast coverage can be adapted depending on the traffic condition and the number of vehicles in the surroundings of each node. Due the selection of this parameter, the number of hops transparent to the algorithm is not necessary in order to calculate the validity of the message, and only the timestamp is used for this task, thereby avoiding the possibility of network saturation. This philosophy also improves some of what the broadcast algorithms lack [
18,
19,
20,
21], described previously.
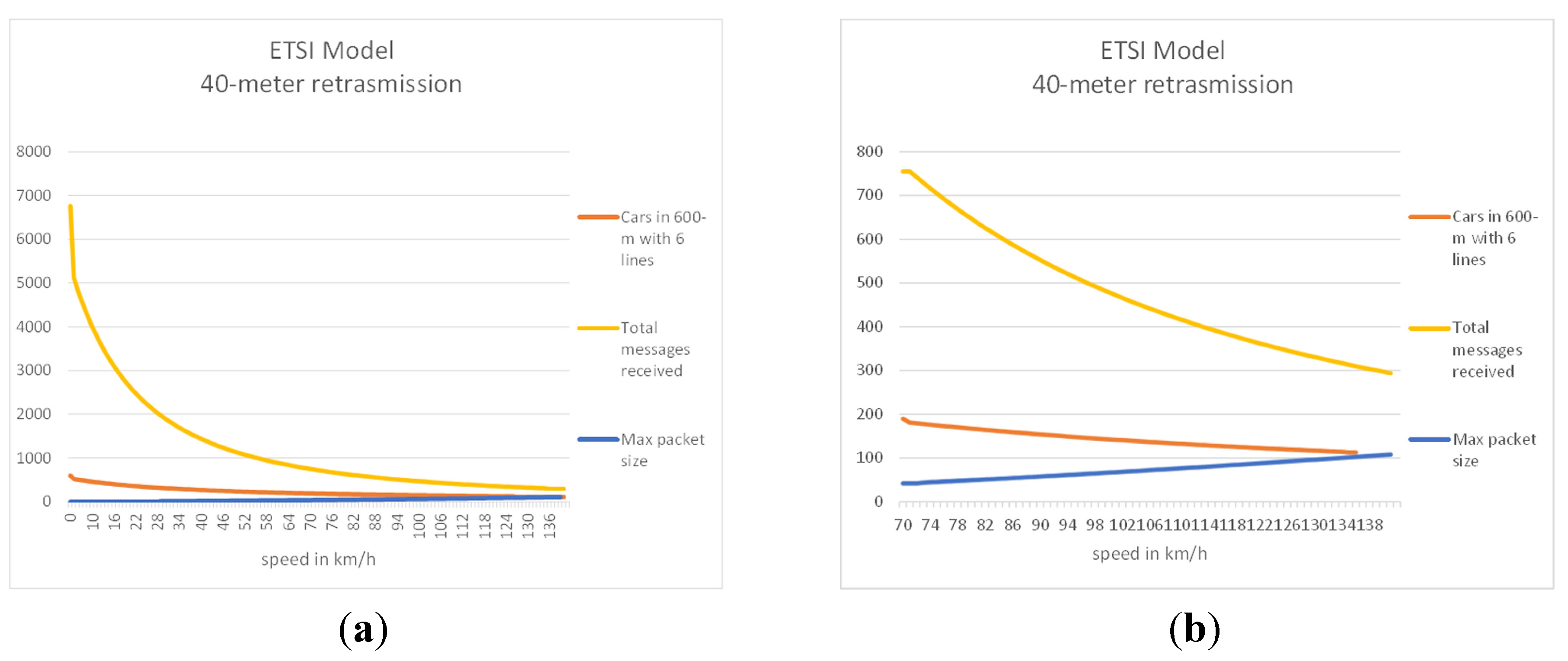
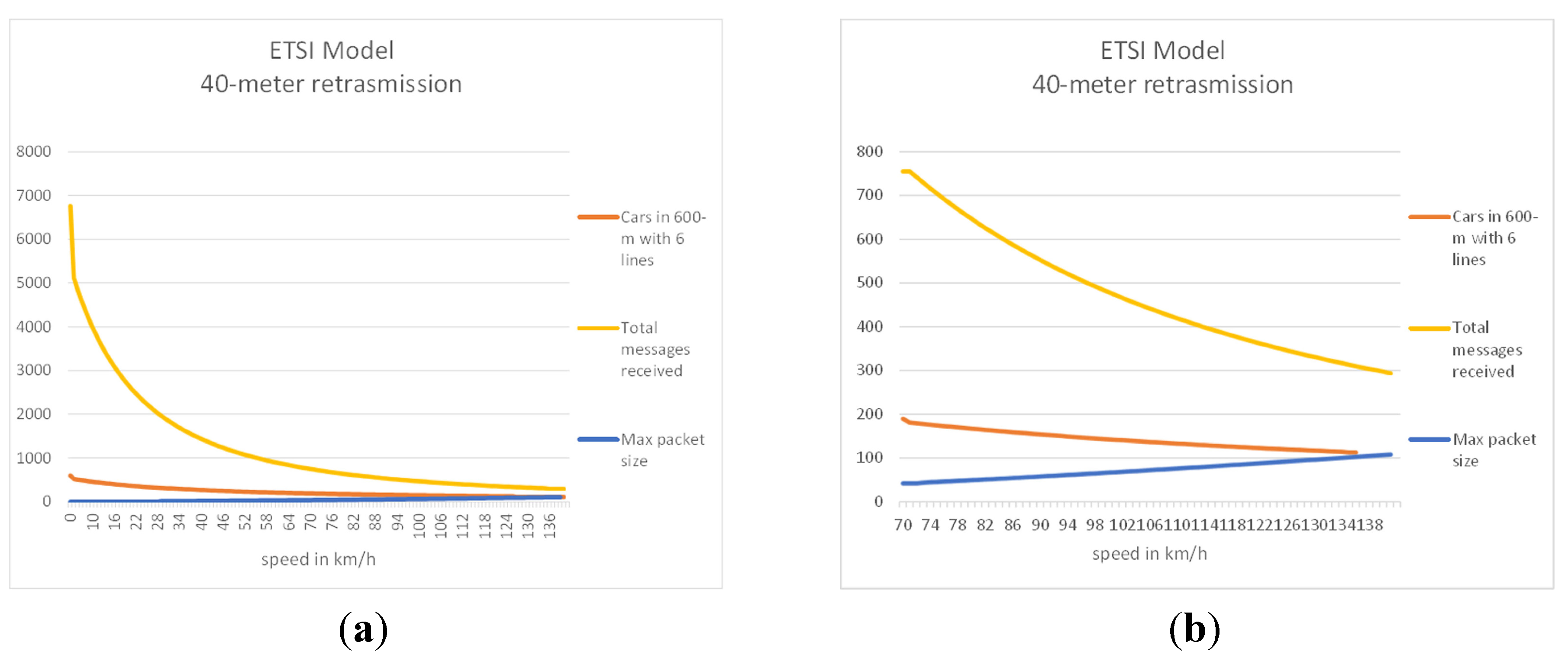
Take an example for better understanding of the advantages of the proposed geo-broadcast, using the same technology of communication for both algorithms, a 128-kbs bandwidth and a range of 600 m. In the algorithm ETSI TS 102 636-4-1, a fixed-broadcast radius of 40 m is used.
Figure 5a,b and
Figure 6 show the results of a simulation that compares the performance of these algorithms. This simulation compares their behavior as a function of the circulation speed of the vehicles and the number of vehicles the maximum communication range in a V2V highway situation (six lanes). With these data, it is possible to estimate the maximum available size of the packet (MP) to avoid network saturation (Equation (3)) and the number of packets received (PR) by each vehicle, considering an emission frequency of 1 Hz, using Equation (4).
where
Bandwidth indicates the bandwidth of the network (128 Kbps),
NV represents the number of vehicles in a range of 600 m,
BCR represents the preset range of rebroadcast and NR represents the number of rebroadcasted messages per vehicle. The first field of Equation (4) indicates the number of the packets generated by the vehicles in the range, including the rebroadcasts; the second field indicates the packets of the vehicles from outside the range, but rebroadcast by other vehicles inside their range.
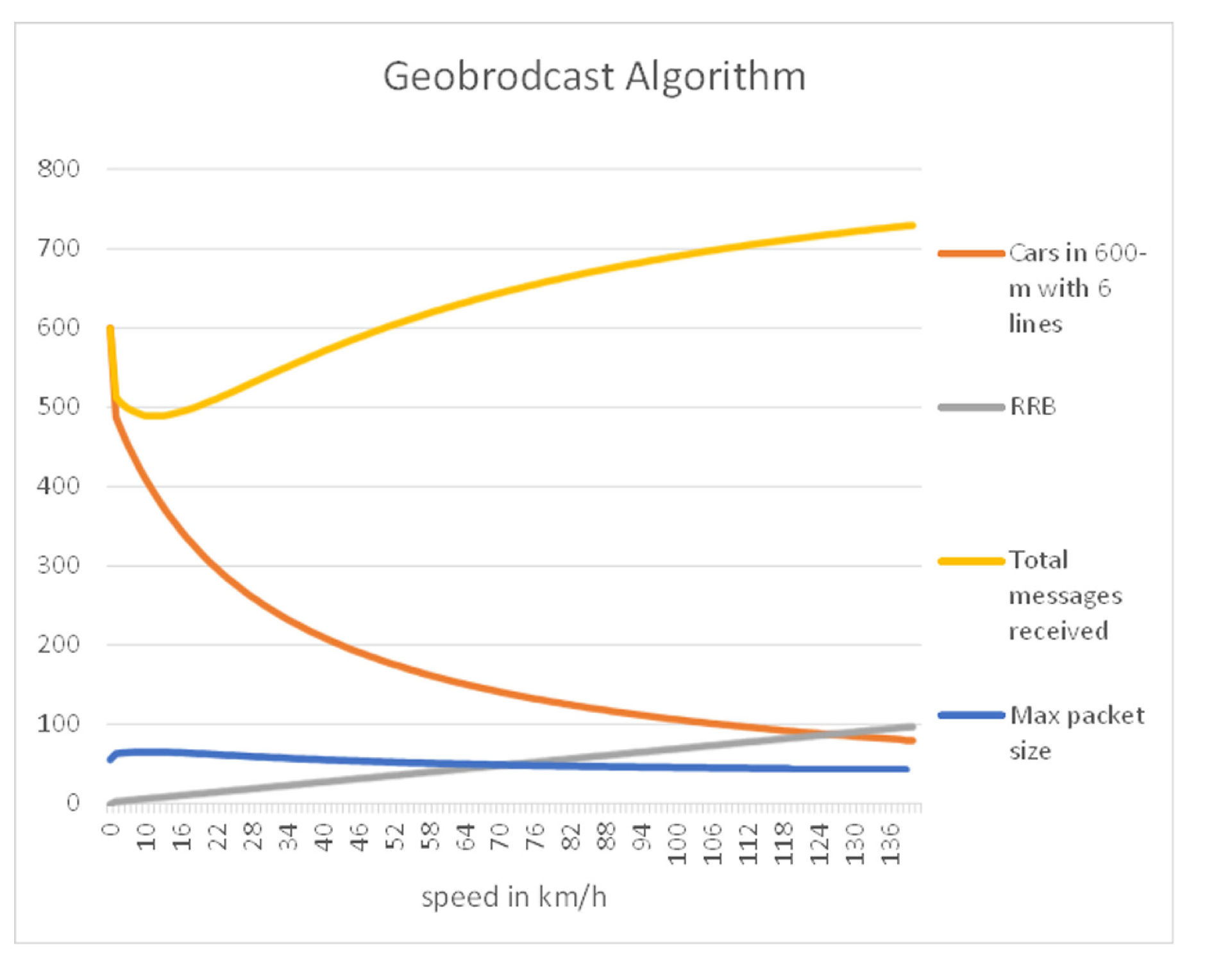
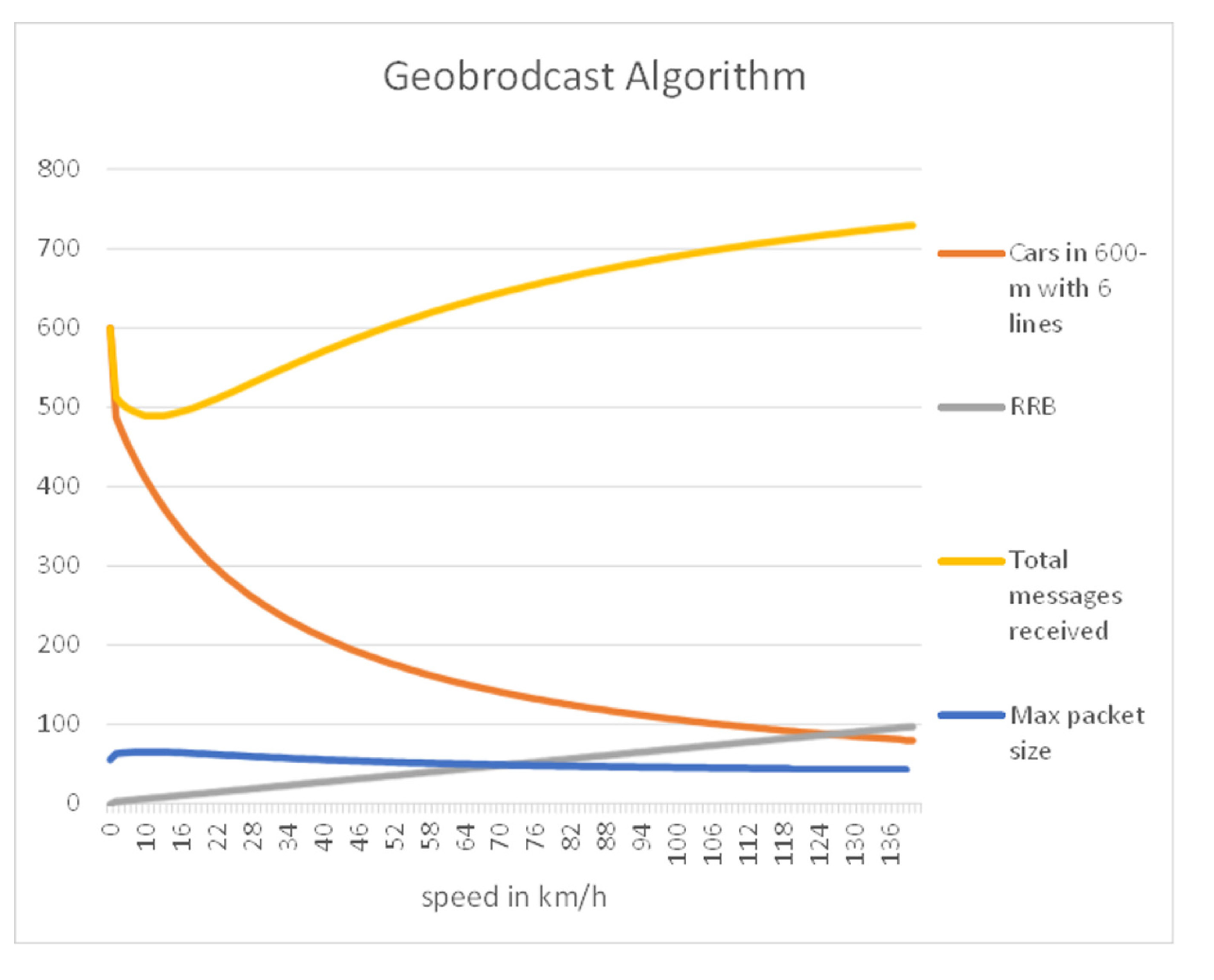
As a result of this simulation, the stability and better performance of the proposed algorithm are clear, since its packet size remains constant around 51 bytes, while the proposed ETSI TS 102 636-4-1 algorithm varies from five bytes to 109 bytes (
Figure 5a), which allows one to increase the number of received messages, even in situations of high road occupancy (
Figure 5b). In
Figure 6 is also shown the RRB of the proposed algorithm.
Figure 5.
(a) European Telecommunications Standards Institute (ETSI) model; (b) details of the ETSI model.
Figure 5.
(a) European Telecommunications Standards Institute (ETSI) model; (b) details of the ETSI model.
Figure 6.
Proposed algorithm.
Figure 6.
Proposed algorithm.
As result of these simulations, it is clear that with the proposed algorithm, the maximum size of the data packet remains constant, as well as the total number of messages received, improving the results of the ETSI algorithm.
5. Data Analysis
To verify the algorithm, we proceeded to test the system in simulation and field trials. The simulation was used to check the right performance of the RRB in accordance with its parameters. Next, a set of field tests was carried out in order to verify the right performance of the algorithms with the selected parameters.
Two kinds of field tests were developed: static and dynamic. The selected circulation speed for every test was 60 km/h, which generates an RBBi of 40 m, in order to emulate the situation of vehicle circulation in a dense traffic situation.
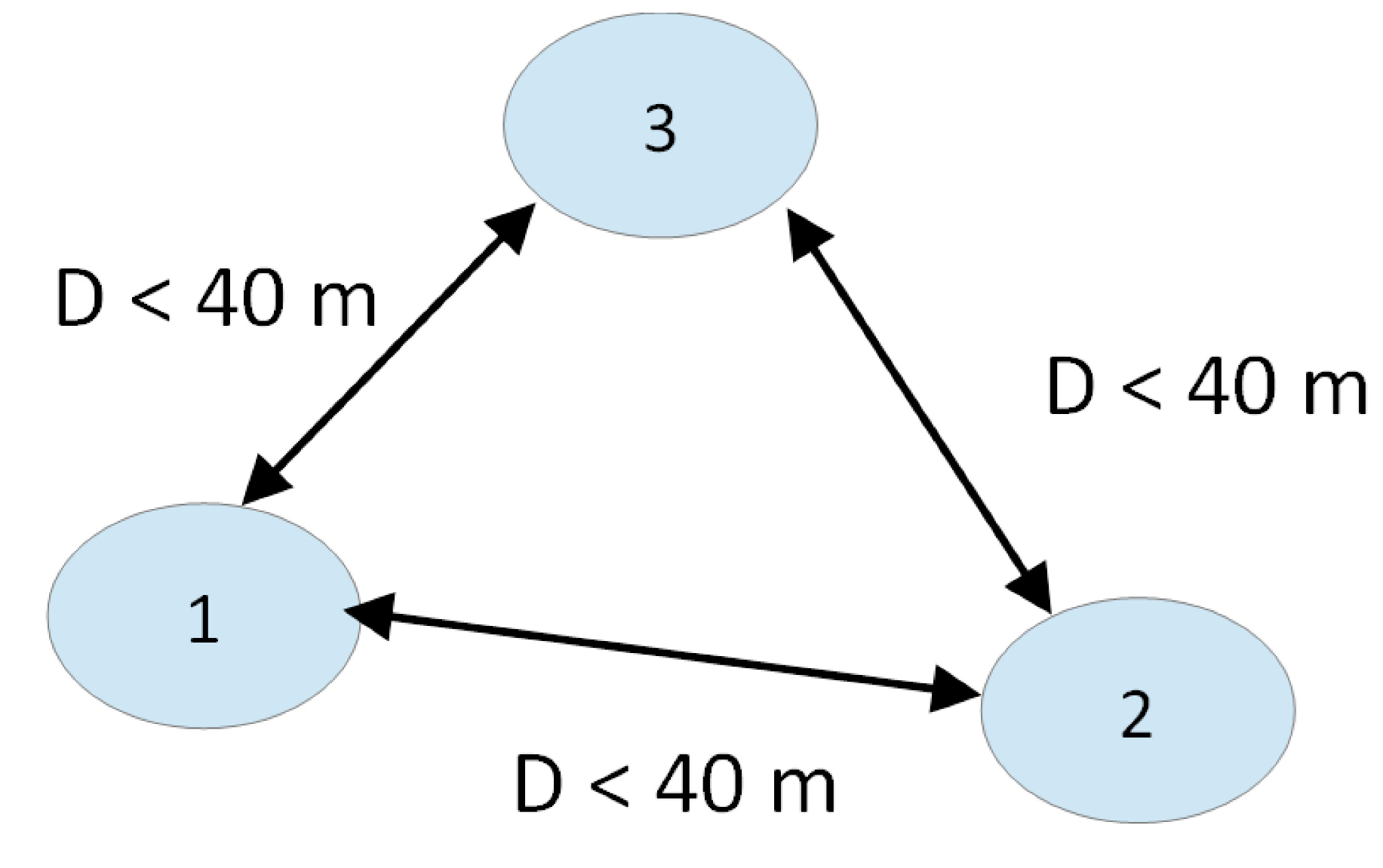
5.1. Static
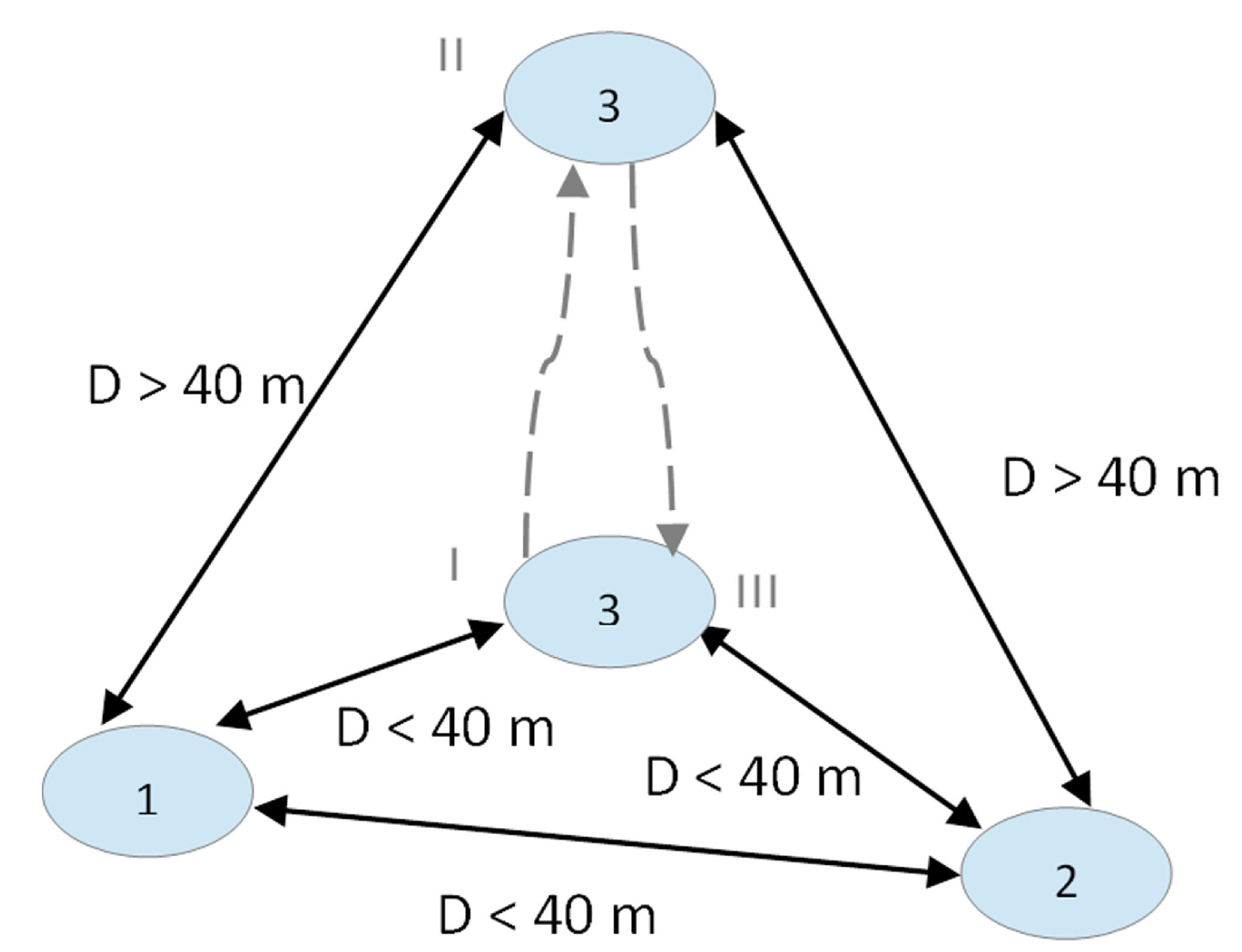
The objective of the static test is to check that the geo-broadcast algorithm runs in the situation where the network is established and no nodes are merging or leaving the network. Therefore, in this test, the system ran for 15 min (913 s) with three nodes broadcasting in static positions, where the distance between them was always less than 40 m (
Figure 7).
In this experiment, the stability of the algorithm was proven. During the experiment, 5,431 messages were sent, and an average of 91.4% was received, as shown in
Table 4 and
Table 5. The cause of this message loss, about 9%, is the high level of interference in the 2.4 GHz band that causes this distance to be at the limit of the coverage, and some packets are not received in the receiving nodes.
Table 4.
Messages sent and received in the static test.
Table 4.
Messages sent and received in the static test.
| Node | Total received | Total Sent |
|---|
| 1 | 3376 | 1825 |
| 2 | 3185 | 1773 |
| 3 | 3368 | 1883 |
| System | 9929 | 5431 |
Table 5.
Node percentage in the static test.
Table 5.
Node percentage in the static test.
| | Node | Received |
|---|
| 1 | 2 | 3 |
|---|
| Sent | 1 | X | 87 | 92 |
| 2 | 94 | X | 95 |
| 3 | 93 | 87 | X |
In order to compare the results of this study with those of other related proposals, we have replicated the field experiments with a different platform. Concretely, the static tests have been replicated using an IEEE 802.11p DSRC platform, running with the geo-broadcast algorithm defined in ETSI TS 102 636-4-1, the one defined in the DSRC standard, with a duration of 206 s.
As shown in
Table 6, the results for these experiments are similar, obtaining a 100% emission/reception rate. The cause of this higher rate is the 5.9-GHz emission band of the 5.9 GHz of the DSRC platform, with a low level of interferences, which assures that the coverage is right to receive every data packet.
Table 6.
Messages sent and received in the static test.
Table 6.
Messages sent and received in the static test.
| Node | Total received | Total sent |
|---|
| 1 | 412 | 206 |
| 2 | 412 | 206 |
| 3 | 412 | 206 |
| System | 1236 | 618 |
5.2. Dynamic
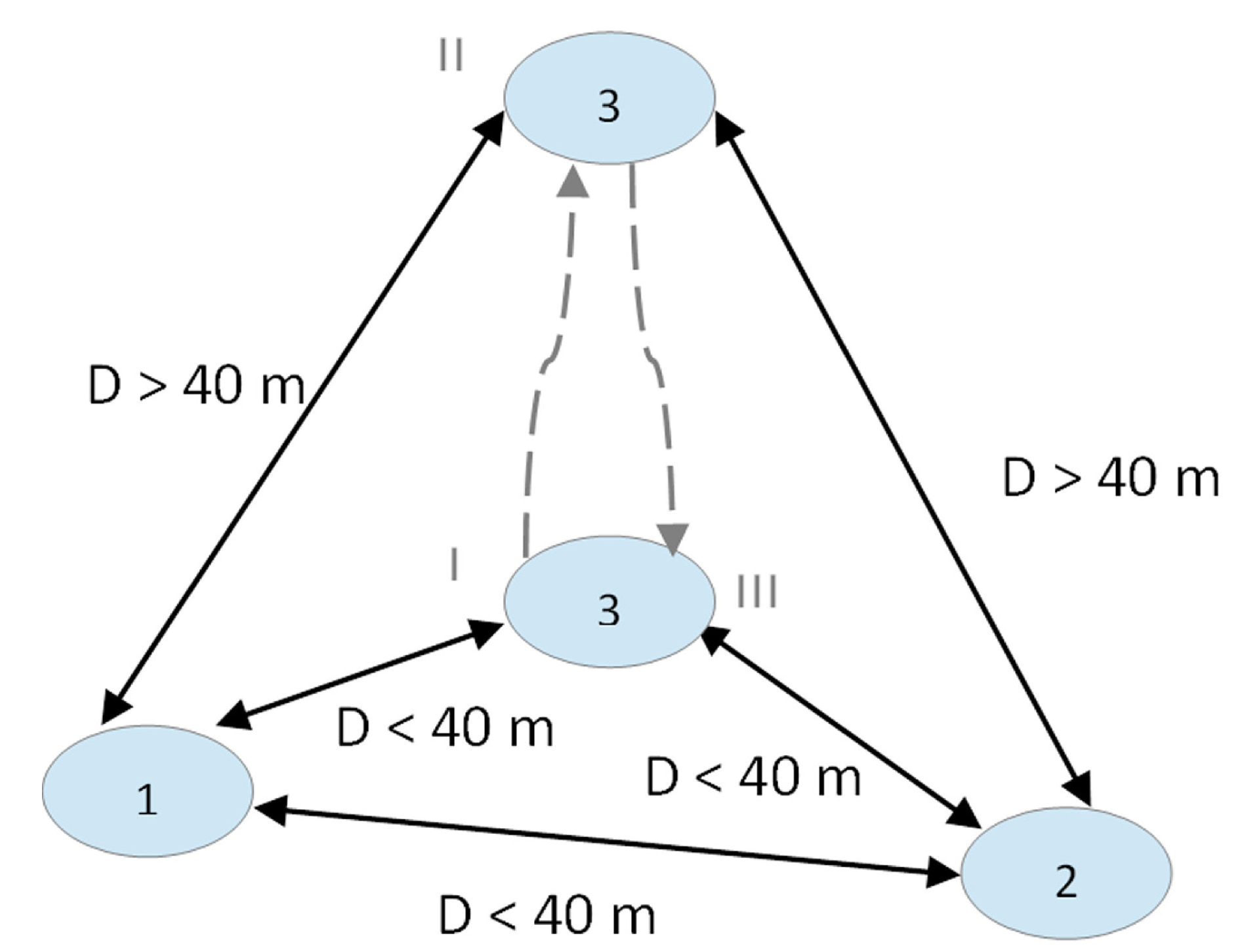
In the dynamic test, the system ran for more than 6 min (370 s) with two nodes initially emitting with a distance between them of always less than 40 m (
Figure 8I) and a third node at a farther RRB distance from the other two.
Therefore, the third node reduces its distance with the others, successfully merging the network (
Figure 8II) and initiating the geo-broadcast message. Finally, this last node separates from the other two at a farther distance than the maximum RRB range, leaving the network (
Figure 8III) and stopping the data broadcasting. This test tries to emulate the situation of a vehicle that overtakes another.
This test simulates the phases of one vehicle overtaking two vehicles on a road. During the experiment, 2198 messages were sent among the nodes, of which an average of 91.1% were received, as shown in
Table 7 and
Table 8.
Table 7.
Messages sent and received in dynamic test.
Table 7.
Messages sent and received in dynamic test.
| Node | Total received | Total sent |
|---|
| 1 | 1298 | 720 |
| 2 | 1398 | 739 |
| 3 | 1337 | 739 |
| System | 4003 | 2198 |
Table 8.
Node percentage in dynamic test.
Table 8.
Node percentage in dynamic test.
| | Node | Received |
|---|
| 1 | 2 | 3 |
|---|
| Sent | 1 | X | 95 | 94 |
| 2 | 87 | X | 90 |
| 3 | 88 | 92 | X |
In this case, a comparison was performed, with the same use case, with the IEEE 802.11p-based platform, running with the geo-broadcast algorithm defined in ETSI TS 102 636-4-1, with a duration of 188 s.
In this second situation, the results with this alternative platform are similar to the previous ones and shown in
Table 9, with an emission/reception rate of 99%.
Table 9.
Messages sent and received in dynamic test.
Table 9.
Messages sent and received in dynamic test.
| Node | Total Received | Total Sent |
|---|
| 1 | 374 | 188 |
| 2 | 376 | 188 |
| 3 | 376 | 188 |
| System | 1126 | 564 |
The two tests demonstrate that the algorithm is stable under static and dynamic conditions, with only 9% of packets being lost and a measurement range of 87%–95%. This is because the tests were conducted in an environment of high radio interference and because of the nature of the prototype devices used, where their electronic characteristics may vary from one to another.
If we compare the results with the experiments performed with the alternative platform, both algorithms comply with their function of geo-broadcast perfectly, but the ETSI TS 102 636-4-1 has the limitation of saturation described in
Section 4, a limitation that is not present in the novel geo-broadcast algorithm described in this paper. In other words, the network and transport layers of both platforms run similarly; they even have different geo-broadcast algorithms, and only some minor differences are caused by the different protocols at the physical level (WSN protocol IEEE 802.15.4 and WiFi protocol IEEE 802.11p).
6. Conclusions
A novel geo-broadcast algorithm that supports V2V mesh communications has been presented. This algorithm has been defined and implemented using IEEE 802.15.4 communication modules and tested in real situations, using the range of rebroadcasting (RRB) as a key parameter to define the range of each message. This parameter allows adapting the range of each message to the traffic circumstances, taking into account the circulation speed and the stopping time of the vehicles. The use of RRB reduces the saturation of vehicular communications, extending the data flow when vehicles circulate at high speeds and reducing it in low speed conditions. The level of robustness and efficiency of the algorithm is able to successfully manage vehicular communications to serve ADAS applications. The validation of the algorithm has been developed in controlled tests, with the expected results being obtained in performance, latency and the number of successful packets received, and is therefore appropriate to support VANET communications in real V2V. Geo-broadcast has also been compared with the former algorithms that are defined in IEEE 803.11p, showing some benefits from the point of view of management in situations with a high traffic flow. Having demonstrated its performance, it is expected that the proposed algorithm can be tested on an 802.11p communication platform, following the actual standards defined by IEEE and ETSI.
An interesting contribution of this work could be the lessons learned during the design, implementation and configuration of all of the necessary elements for the field test. In this case, some limitations have been found when we try to translate the wireless sensor network experience to a vehicular environment, recently known as the Internet of vehicles. The first limitations are that the algorithms and internal tools of WSN have been designed to run in static environments, like buildings, fences or similar environments, with a low rate of mobility. This means that the internal broadcast algorithms have had to be redesigned in order to run in a vehicular environment. Additionally, geographical capabilities have also been added to these algorithms, in order to comply with experimental requirements. Two important limitations have been found in the WSN technologies: on the one hand, the limited CPU processing capacity of the usual nodes, which makes them saturate in high CPU demand situations, like the case of mobility; the second is the use of the 2.4-GHz frequency band, shared with WiFi, and with a high level of interference, which causes a reduction in the range that is, in some cases, dramatic.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}