1. Why Recoverability: Instead of Introduction
The human world evolves and progresses by applying knowledge derived from observations of and familiarity with repeatable aspects of nature. Our perceptions, understanding, and ability to model reality enables us to develop the policies, processes, and products required, in order to attempt to control the behaviour of natural phenomena, or human-made objects.
Nature tends to achieve stable and reliable progress (sustainable growth) and avoid regression and degradation. Sustainable growth can be considered as a fundamental descriptor of living matter, while regression and degradation are descriptors of dead matter. A clear differentiation between live and dead is required, but, so far, there has been no substantial research, or projects, on it.
The authors of this paper believe that the fundamental distinction and difference between living processes and dead matter is recoverability.
Essentially, recoverability in the system is based on the ability to use available redundancy to recover from environmental, or internal impacts and shocks. Two things are worth mentioning here: first—redundancy is necessary for recoverability, and second—redundancy must be deliberately introduced into systems, policies, and processes to make them resilient and efficient.
The recoverability approach and its analysis, application, and conceptual development in the domain of computers is one of the aims of this paper. The second aim is the analysis of the phases required for the implementation of recoverability for stand-alone and connected computers.
Usually, connected computer systems display fluctuations due to changes in the underlying systems. Reasons for this may include, for instance, workload, software completeness, consistency, and size of applications, or changes and shocks emanating from their environment. So far, networks sporadically and inconsistently exploit recoverability phenomena to tolerate these various fluctuations.
Connected computer (further CC) systems can be considered in terms of time, i.e., as a process of operation. Recoverability can then be applied to keep this process within a restricted set of properties, “smoothing” the process. We can apply and investigate various recovery algorithms implicit in such systems and tune the underlying parameters, reducing the extent of fluctuations and hence, reducing the cost they impose in structure, information, or performance.
Natural recoverability phenomena exist in almost any natural system, but we do not understand them. Hence, we cannot specify how the algorithm works and therefore, use it properly. This is exactly the purpose of the methodology proposed in this paper. In a practical sense, an understanding of recoverability enables us to advocate for the re-design of the whole world of CC systems, making them resilient to internal and external fluctuations.
1.1. Why Reconfigurability: — An Example
Let us consider a case: an element is deformed by environmental impact. Destructive deformation of the element could cause the loss of its properties.
Let’s assume an element has internal structural resources (redundancy). Redundancy of the element structure might enable the element to return to its previous state, or condition, after impact. The external impact does not change the element, if redundancy is applied and sufficient. A second impact might occur and be tolerated in exactly the same way. Let us now consider a situation where the element has properties of being alive, such as amoeba.
If an amoeba has sufficient resources available to it to use and to protect itself from the destructive energy of the environment or an impact, it will recover and continue to live—the amoeba exhibits redundancy in order to survive.
If the external event is repeated, the amoeba can self-tune and be able to react to the impact faster, tolerate the event for longer, and as a consequence, suffer less long-term damage. The external event itself might be periodic heat from the sun, cold water, fire or gas, electric discharge, etc.
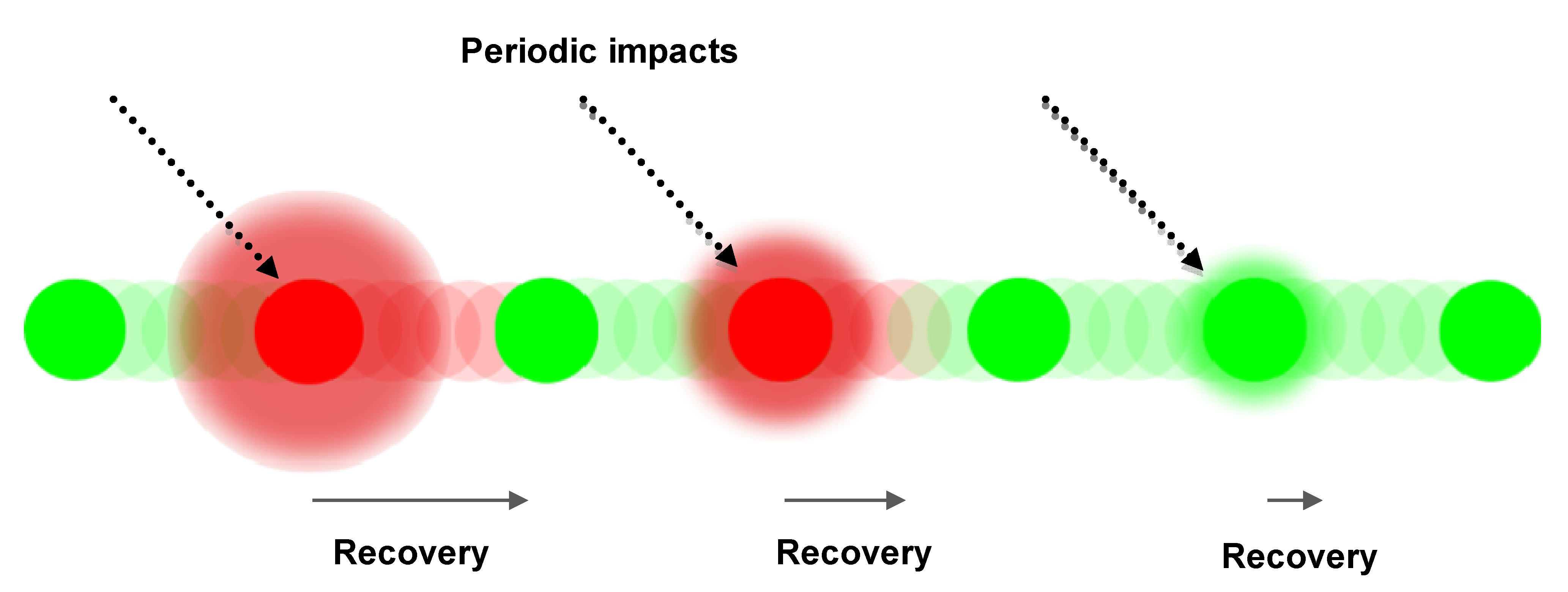
Having sufficient internal redundancy to tolerate repeated external impacts caused by various events makes recovery possible. Live matter differs from man-made systems in terms of the time required for recovery and the use of available redundancy. The speed of recovery increases when the impact is the same. Here, “recovery training” takes place and either the level of redundancy, or speed of recovery, or both increase. A sequence of impacts and element recovery is presented in
Figure 1.
Figure 1.
Periodic impacts, element’s time to recover.
Figure 1.
Periodic impacts, element’s time to recover.
The circles show the state of an element over time, where green indicates an element in a good, or acceptable steady state and red indicates an element under recovery.
Figure 1 indicates an element that adapts to the periodic external stimulus, can decrease the time for its recovery.
Where the element may be considered alive, such as in the case of the amoeba, using redundancy for recovery can reduce the time it takes to react to the same event, provided the event is periodic. Thus, life might be defined as the following:
An element is called alive, if in repeatable conditions, it is able to recover progressively, using internal redundancy actively.
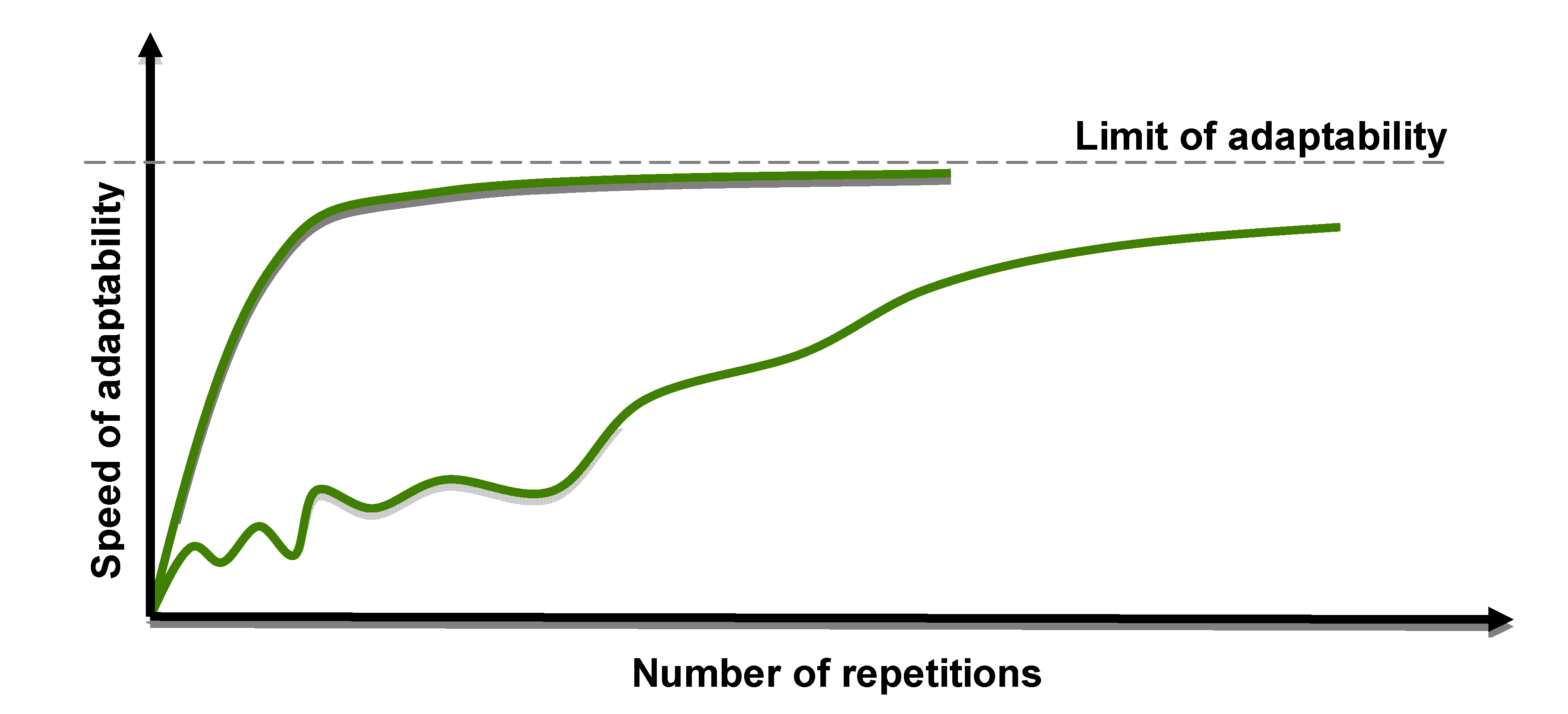
The adaptability of the live element has its limits.
Figure 2 shows, for example, an element approaching the limit of its adaptability and the role of its ability to recover. Whilst wildlife evolution may be seen as similar to the lower curve, the evolution of “smart” species should be smoother and faster to reach the same, or higher, limit of adaptability—the shortened curve in the diagram.
Thus, our design of information processing systems, computers, especially complex systems such as connected computers, can be measured in terms of efficiency of recovery/resilience in comparison with wildlife phenomena, where available redundancy is used and adaptability grows. In other words, how good we are at designing our systems to be adaptable can be checked against living objects.
What is the point of this? Without external repeatability of events, evolution is hardly possible; having internal redundancy to recover is not enough. Evolution depends on the repetition of the same external events—i.e., no repetition, no evolution.
Figure 2.
The adaptability of a live element to a repeated external stimulus has its own limits.
Figure 2.
The adaptability of a live element to a repeated external stimulus has its own limits.
It means, for example, that the merit of sending a NASA probe searching for advanced forms of life on asteroids is worth questioning. An asteroid does not have the repeatability of environmental events during its flight. Even if life forms were there initially, their redundancy was spent for nothing in attempting to tolerate sporadic impacts.
1.2. Organization of the Paper
How is this two-part introduction about recoverability and reconfigurability related to CC systems? At first, nature-made living systems are much more reliable and resilient than human-made ones. Therefore, some of the key principles of “mother nature designs” are good to adapt for CCs. Secondly, an analysis of existing technologies and applications, even if it is brief one, might highlight what is required to make our designs smarter.
Further, commercially and technologically speaking, we will address recoverability and other properties that might be required for connected computer systems. Why do we need to make this clear? Market segmentation in computer and CC systems might be reduced, or eliminated, enabling unified and modernized technologies to be applied.
We will discuss properties such as reliability and some ways to achieve it, using deliberate redundancy and recoverability when required. We extend redundancy from fault tolerance to PRE-smart system design. PRE here stands for Performance-, Reliability-, and Energy-smart systems. Later, we will be able to estimate the efficiency of redundancy use for reconfigurability and recoverability for CC systems, balancing the trade-off between PRE properties.
2. Connected Computers: Technologies and Applications
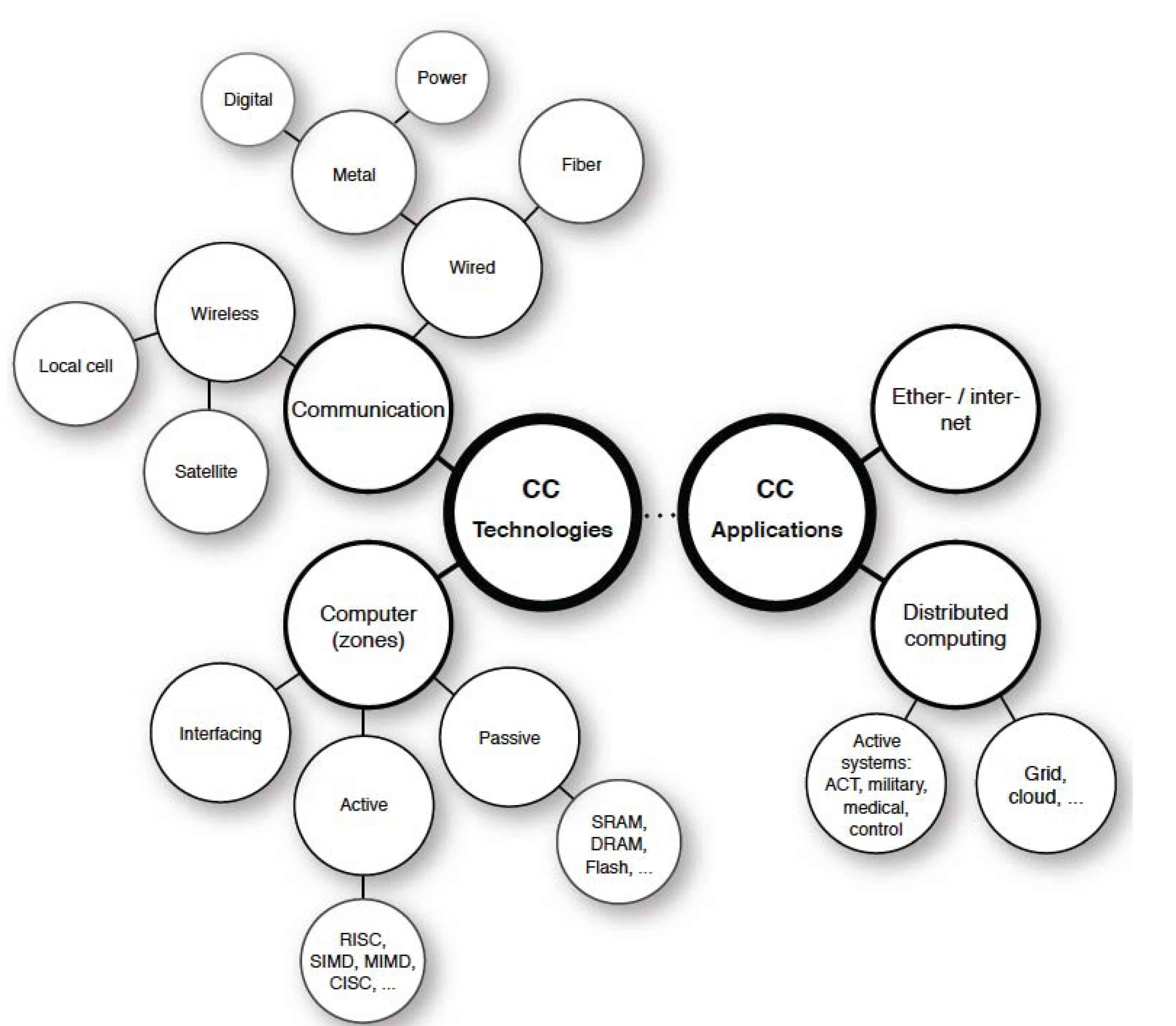
CC technologies in general are divided into two almost independent clusters: Communication and Computer, as
Figure 3 shows.
Figure 3.
Connected computers—technologies and applications.
Figure 3.
Connected computers—technologies and applications.
The Communication cluster deals with various media (wired, wireless) using different signal carriers (copper, fibre, air). The cluster faces problems of complexity and the volume of data that needs to be transferred, together with requirements of timely data delivery over complex interconnected networks.
The Computer cluster addresses all three zones of information processing to make them faster and technologically feasible. The different zones differ semantically in terms of information processing: Active, Passive, and Interfacing. The Active zone is the one where information is transformed and is currently known: in the form of complex instruction set computers (CISC), reduced instruction set computers (RISC), single instruction multiple data (SIMD) architecture, and multiple instructions multiple data (MIMD) architectures. Flynn’s [
1] classification was used to reference these architectures. The need for reconfigurable architectures in future to produce possible performance gains has been clearly explained: in [
2] and [
3] with a view to performance and [
4] and [
5] introducing options for increased reliability. The Passive zone is known: in the form of static and dynamic memories, flash memory,
etc. Since the mid-1980s, the reconfigurability of memory has been substantially developed for reliability and fault tolerance purposes [
6,
7,
8]. The overall reliability of the systems and methods of their analysis is given in [
9]. The Interfacing zone deals with data transfer between zones and movement in and out of an external environment.
Historically, computer systems were not really fit for the purpose of working within CC systems, which reduces our expectations when addressing the aspect of distributed computing by design. Attempts, such as a transputer, also prove that introducing distributiveness into CC is challenging and not an easy task. CC systems such as the Internet and Ethernet are expanding enormously in terms of data transfer, video, audio, and e-mails and are moving in a strange direction, allowing home-makers, young people, financial sector operatives, and bureaucrats communicate and “deliver their messages and instructions”.
All of the aforementioned applications are not critical in terms of real-time operation; VOIP requires some traffic shaping to deliver packages with time and other constraints, known as Quality of Service. This is what the vast majority of CC systems are using. At the moment, according to various sources, around two billion IP addresses are allocated permanently. This prodigious amount of data requires handling procedures that need to be much more effective, as everyday life becomes dependent on the “health” of CC systems. There is a visible shift in the distributed computing paradigm (using distributed, connected computers to solve large-scale tasks), toward distributed databases, financial services such as ATM, and so-called “cloud computing”. Putting scepticism aside and leaving other papers and researchers to discuss what is the real technological progress of cloud computing, we note here only that the efficiency of large-scale applications, including cloud computing, depends on the algorithmic skeleton—graphs of data, control and address dependencies [
2] and their use, in order to prepare flexible, reconfigurable and resource-efficient algorithms for distributed computing.
To be effective, distributed computing requires a periodic “tuning” of the CC topology and computers as the elements in that topology. These tunings of application software, system software, topology, and internal structure of the computers should be handled statically, before execution and supported dynamically, during execution.
So far, there has been no visible progress in this direction, in spite of substantial investment under the flag of cloud computing. At the same time, there is a segment of human life that really requires attention and the involvement of CC: safety-critical, real-time active control systems, military applications, health monitoring,
etc. All these applications should benefit from CC, but they require the integrity of a CC system, in terms of hardware, system and application software, user and system data, and the billions of connected computers to be applied much more efficiently, following the maxima:
Remark 1. Technology must help people to become better, not to be more comfortable.
Therefore, safety critical applications (military, health monitoring, emergency management, air-traffic control, traffic control at large) should emerge and exploit existing connected computers. Two approaches to making CC useful are becoming obvious: the application of existing CC to wider and more challenging areas and the use of specially-built, safety-critical systems for “common” applications, as a part of the family of CC.
Ignoring any of theses approaches will lead to bigger market clustering and industry segmentation, resulting in the communication between entities becoming less efficient and which contributes to increased energy and ecological overheads—an unforgivable waste of resources for human race.
2.1. Problems and Properties
How should we avoid this segmentation in technology and market clustering? Certainly, a CC system should have some facility to support merging processes, but what are the properties of CC systems that should be avoided? In addition to the requirement for trustworthy CCs (security of hardware, system and application software, and user data), widening CC adoption in terms of application use requires the development of recoverability. Recoverability as a property was explained in the introduction; it requires an implementation of a generalized algorithm of fault tolerance (GAFT).
GAFT was introduced in [
5] and has been applied to various memory structures (Passive zone) [
6,
7,
8] and processors (Active zone) [
4,
5,
10]. Note also that recoverability is practical, if it is invisible for the applications of a CC system.
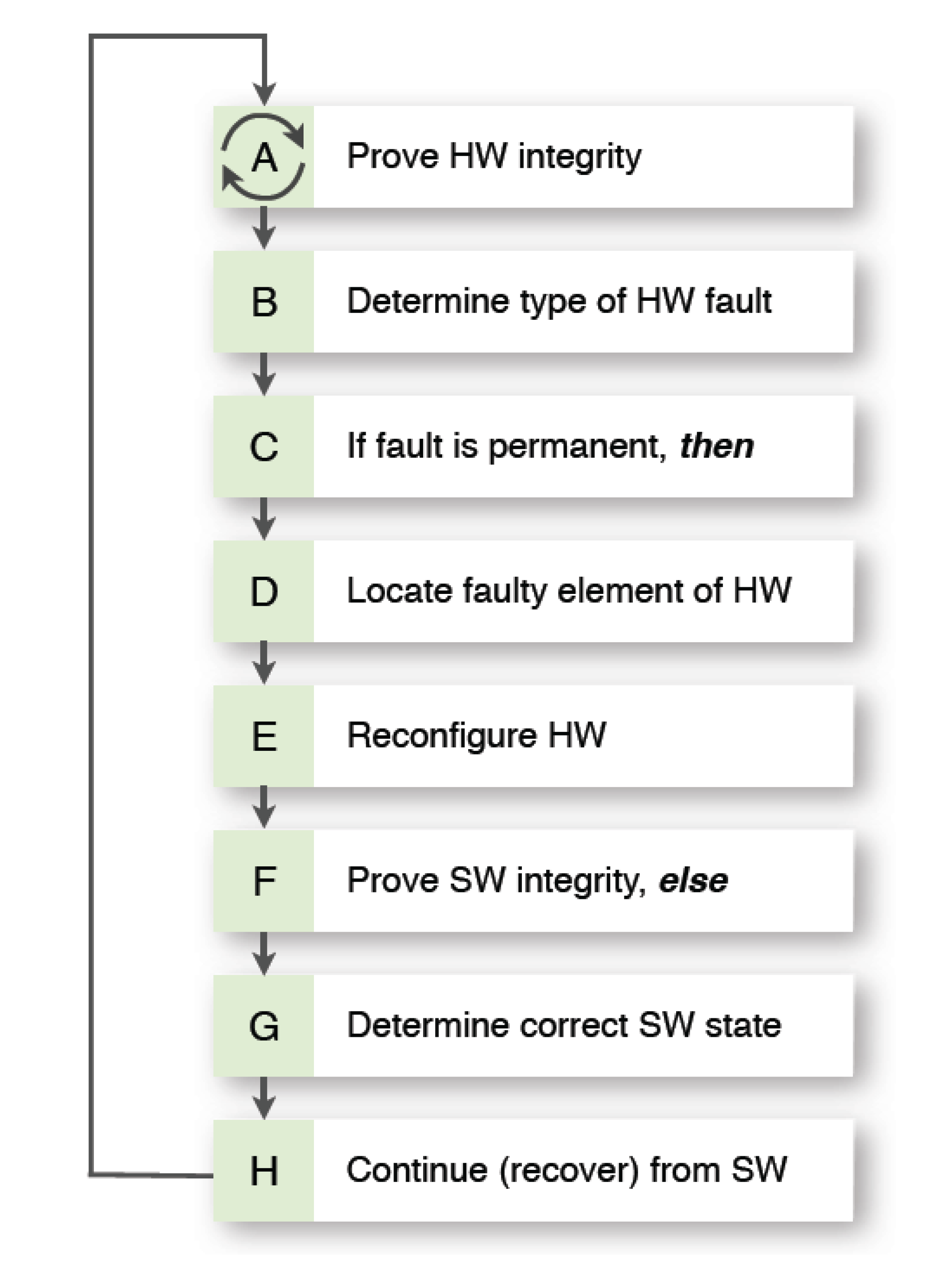
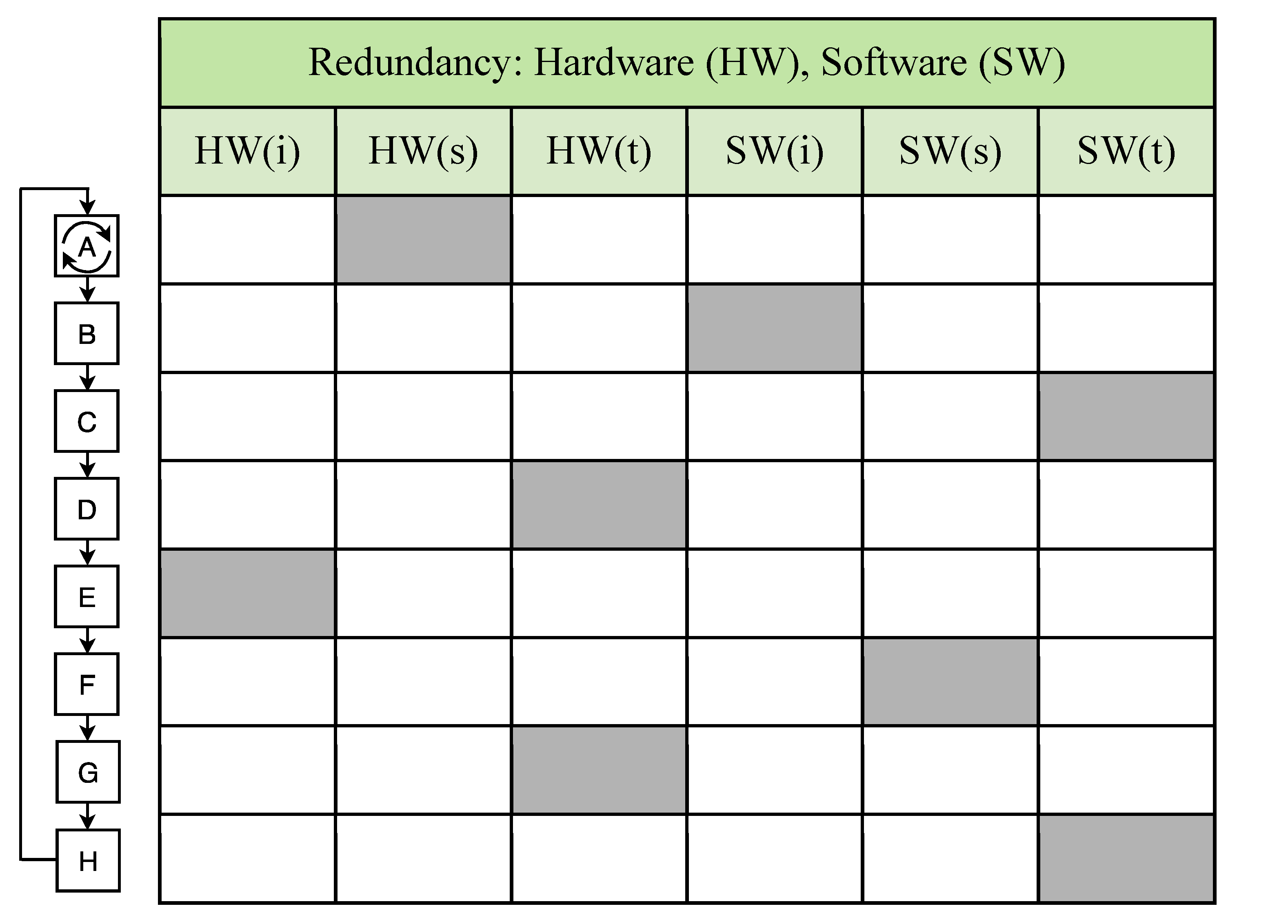
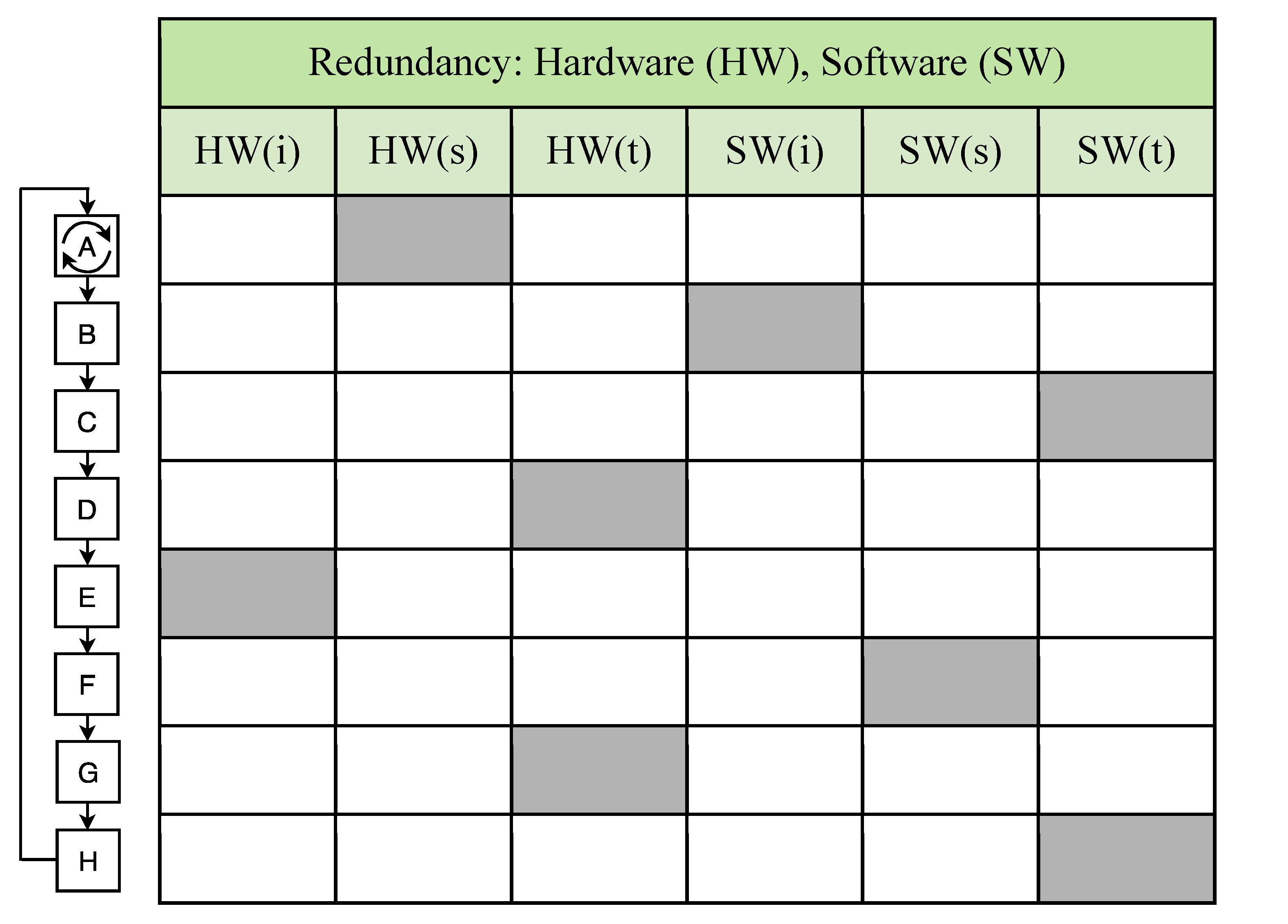
GAFT assumes the execution of several sequential steps related to hardware (HW) and software (SW), in terms of proving the integrity of the system, detection of a fault, defining the “level of damages” and reconfiguration of the hardware and software to correct conditions and configurations in order to continue operation, as
Figure 4,
Figure 5 will now show. Note that GAFT has two main phases—one for hardware, another for software. GAFT is initiated if a fault, or any other deviation, has been detected. During the first step, it recognizes fault type in order to gauge location and tolerance.
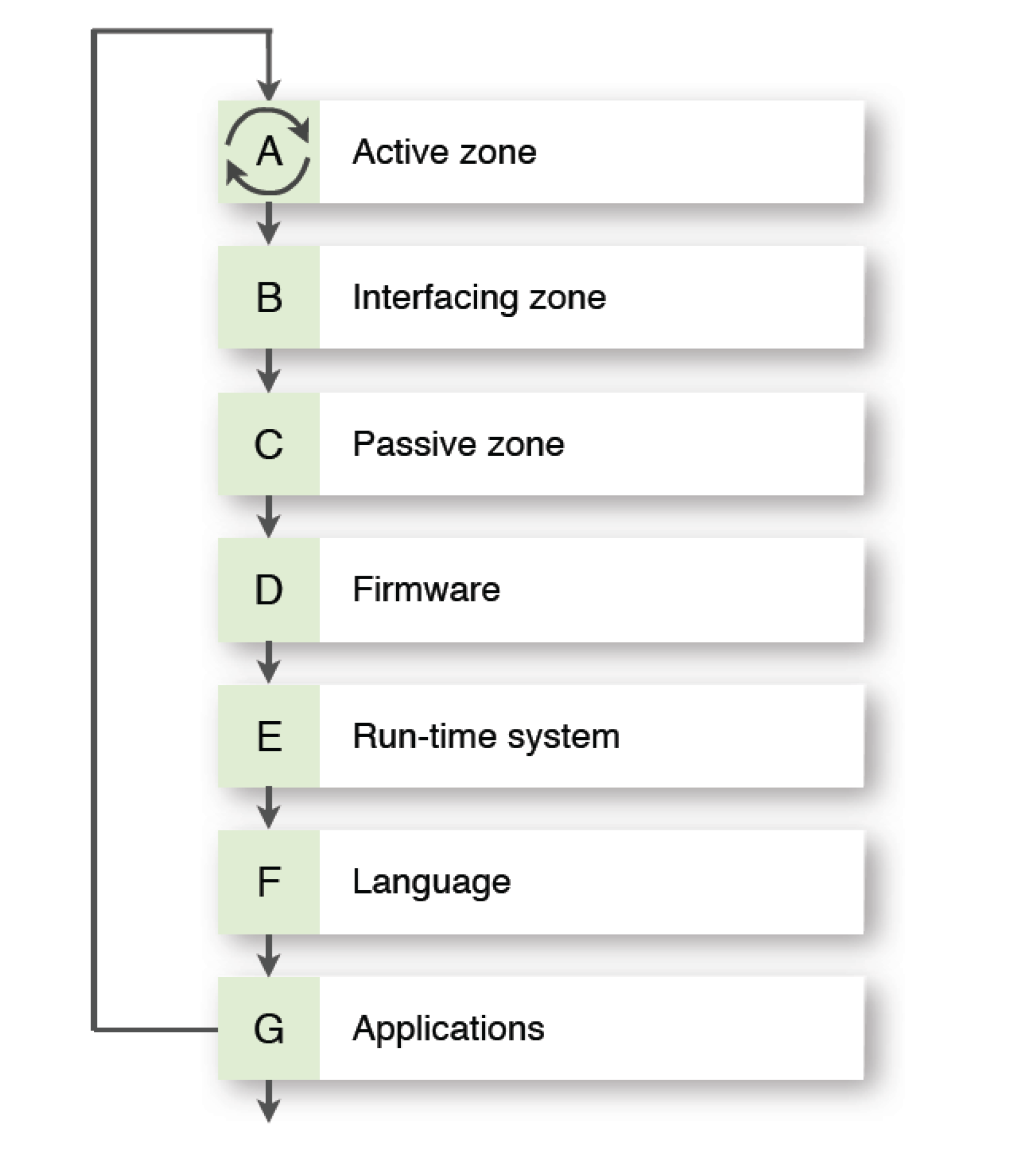
Figure 4 shows a GAFT algorithm that executes by steps, where fault tolerance does not exist until all are completed, in other words,
recoverability is not achieved.
Figure 4.
Generalized algorithm of fault tolerance.
Figure 4.
Generalized algorithm of fault tolerance.
Figure 5.
Redundancy application for GAFT.
Figure 5.
Redundancy application for GAFT.
The redundancy types of application for fault tolerant CC systems are well known and based on the categories of structure, information, time and implementations in hardware and software. In
Figure 5 below, “s”, “i”, “t” stand for Structure, Information, and Time, respectively and “SW”, “HW” for Software and Hardware. At different stages in GAFT, various redundancy types might be applied more, or less efficiently. The white boxes show a possible application of fault tolerance, using the described redundancies. The choice of redundancy type for the steps of GAFT implementation depends on the requirements of the design.
The recovery phase of a GAFT implementation might use various redundancy types, as per [
4,
5,
7,
8]. Imagine we are capable of implementing GAFT over a CC system. Then, even high demanding real-time applications might be processed easier and more reliably. GAFT includes three main phases: checking, reconfiguration, and recovery. All three of them must be implemented and better “imbedded” at the design level of CC systems. In other words, reconfiguration is becoming an integral system property for connected computers and should be implemented.
While we are capable of using redundancy for checking, reconfiguration, and recovery within a CC system, we should ask ourselves:
Could we use this redundancy for other purposes?
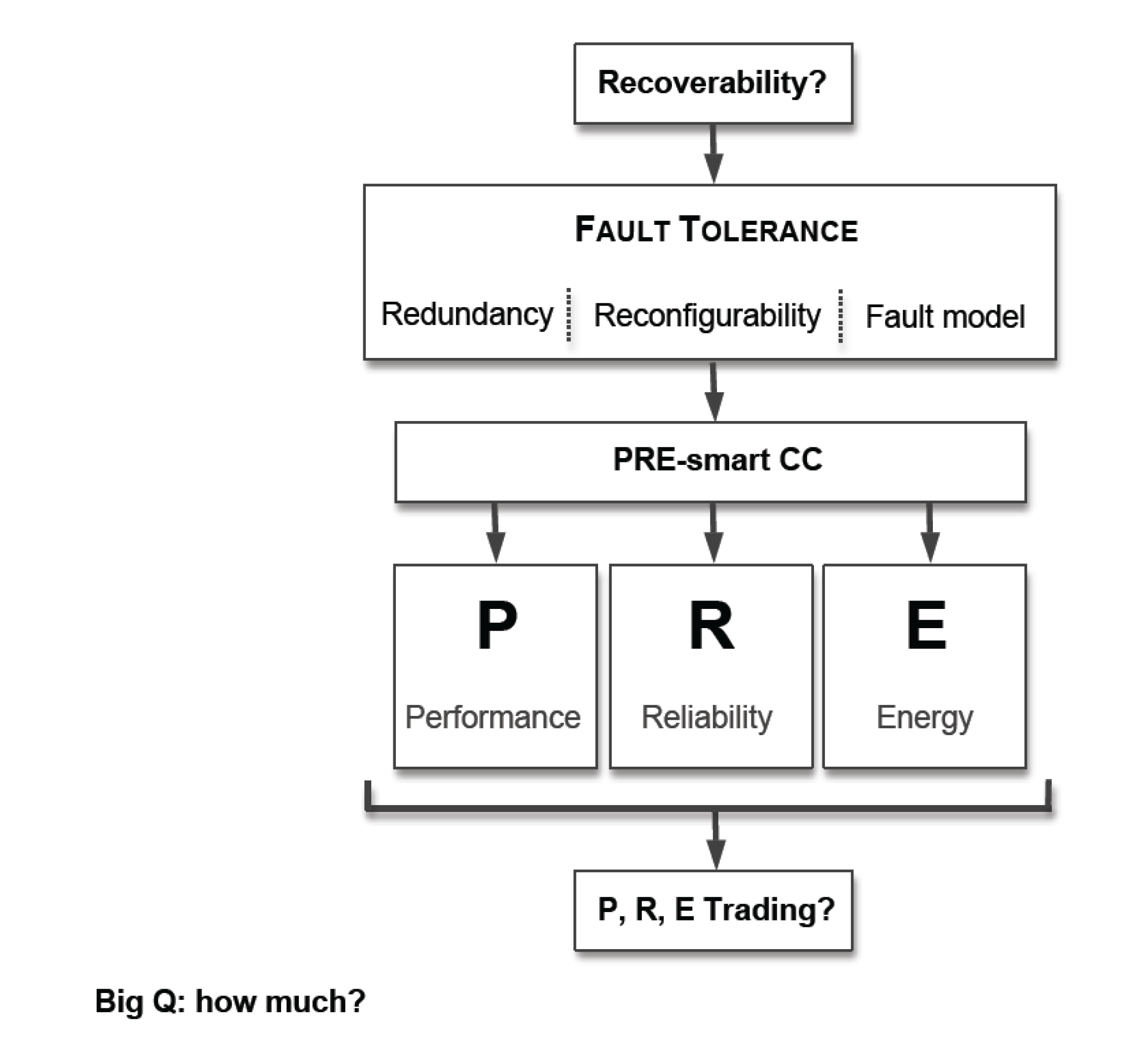
Introducing system redundancy might allow us to achieve recoverability. We need all the ingredients—redundancy, reconfigurability, and fault modelling—in order to understand and analyse existing mutual dependencies at every stage of the design and development process.
At the same time, redundancy can be used for reconfiguration of the CC system for other purposes such as performance improvement, or power efficiency.
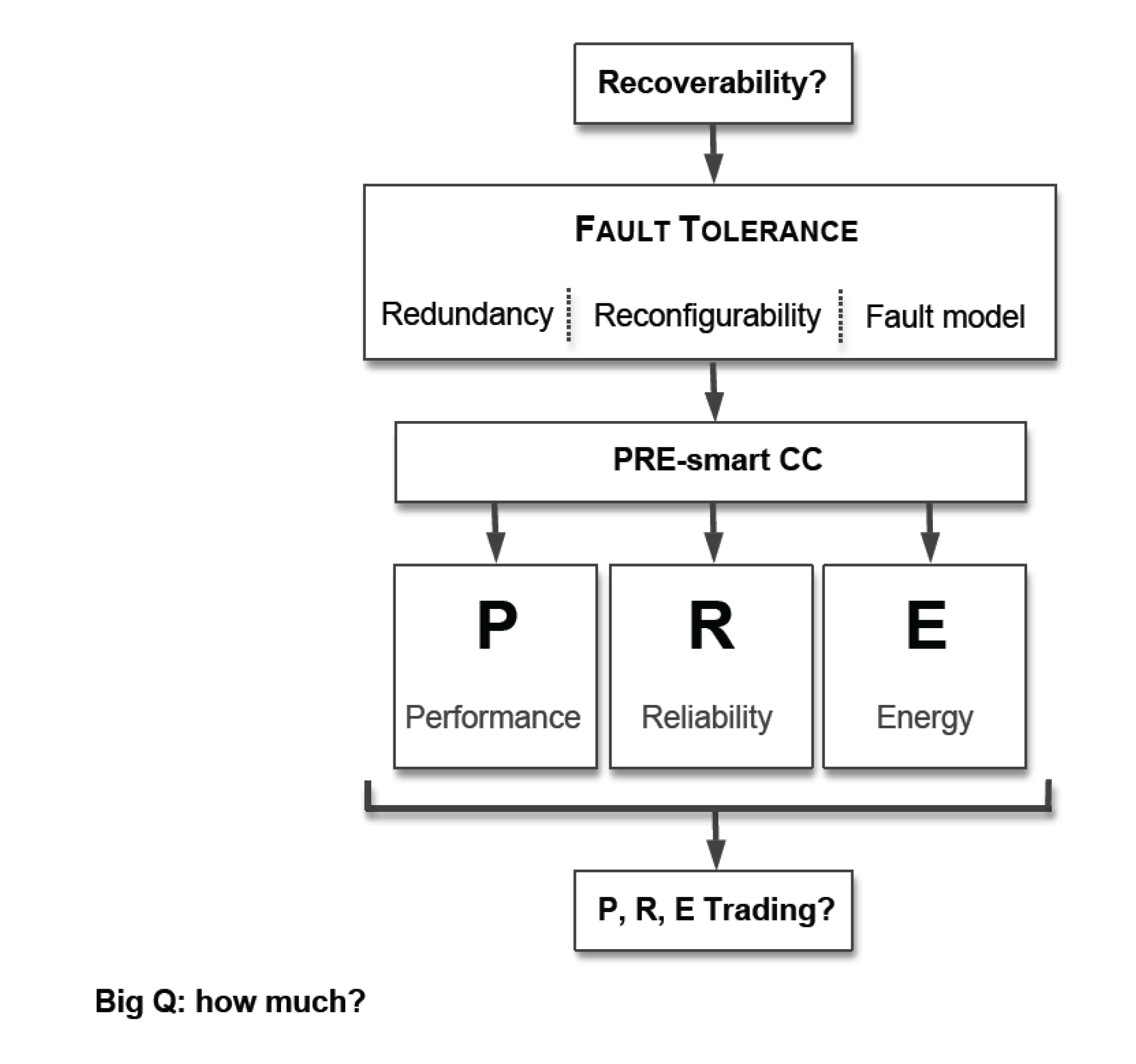
Figure 6 illustrates how properties may be inherited for PRE-wise systems. Thus, PRE-wise systems might be designed rigorously, using reconfigurability and recoverability as system features, if they are introduced at conceptual level. The success of PRE designs for CC systems depends on the careful balancing, or “trading-off”, of redundancy against the desired PRE property.
Figure 6.
Redundancy and reconfiguration application for PRE systems.
Figure 6.
Redundancy and reconfiguration application for PRE systems.
2.2. Trading P, R, E
Structure,
Information, and
Time, as the various types of redundancy, might be weighted, say, in units or values, with or without reference to the steps of GAFT, or any other algorithm where redundancy has been applied. The relative importance (and cost) of the redundancy type chosen for the steps in the algorithms shown in
Figure 4,
Figure 5 might be introduced as a coefficient
αi, related to the cell
i (
Figure 5). Similar “valuations” of redundancy types might be applied for any other algorithms designed for the implementation of PRE properties.
While time and information is understandable in units—seconds and bits, the structure, especially structural redundancy requires some extra effort. Note also that time, information and structure are considered as independent variables. Structural redundancy for our purposes might be measured using the graph-related notation:
where
dS denotes introduced structural redundancy, while
dV and
dE denote extra vertices and edges added into the structure in order to implement the steps of GAFT, or any other algorithm.
Then, our efforts toward the goal of PRE can be measured quantitatively, as a vector of redundancy use:
In determining the cost of each type of redundancy used and describing the steps of an algorithm to achieve performance improvement, even in a simplified version such as that described in
Figure 7, we can quantify the impact of each solution, according to the redundancy types applied. In the same way as
Figure 5 (fault tolerance implementation), we are able to use various redundancy types effectively and estimate the impact of applying various redundancy types to gain computer, or CC system performance, or energy.
This approach explains, for example, the limitations of system software-based developments using Java—it will always consume more time, hardware, software, and energy to store and process. In other words, we always will waste much more energy than really required.
Furthermore, the over-use of flash-based memory will also add to the energy wastage, as the activation of one memory cell in flash requires the application of power to the bulk of a 64 K, or 64 M memory segment.
The principles of PRE design should be applied to the CC system as a whole, using the redundancy- and reconfigurability-wise approach illustrated here. The “costs” of such redundancies may differ for each of the goals of P, R, or E. That being the case, tables similar to those proposed above have to be crafted individually for various purposes.
A PRE-wise system design is the future. When a computer, or CC system is designed with redundancy and reconfigurability in mind, with possible smart configurations and reconfigurations for PRE purposes, the market segmentation of information computer technologies (ICT) will be reduced dramatically. Therefore, PRE-wise computers will be the best fit for CC systems.
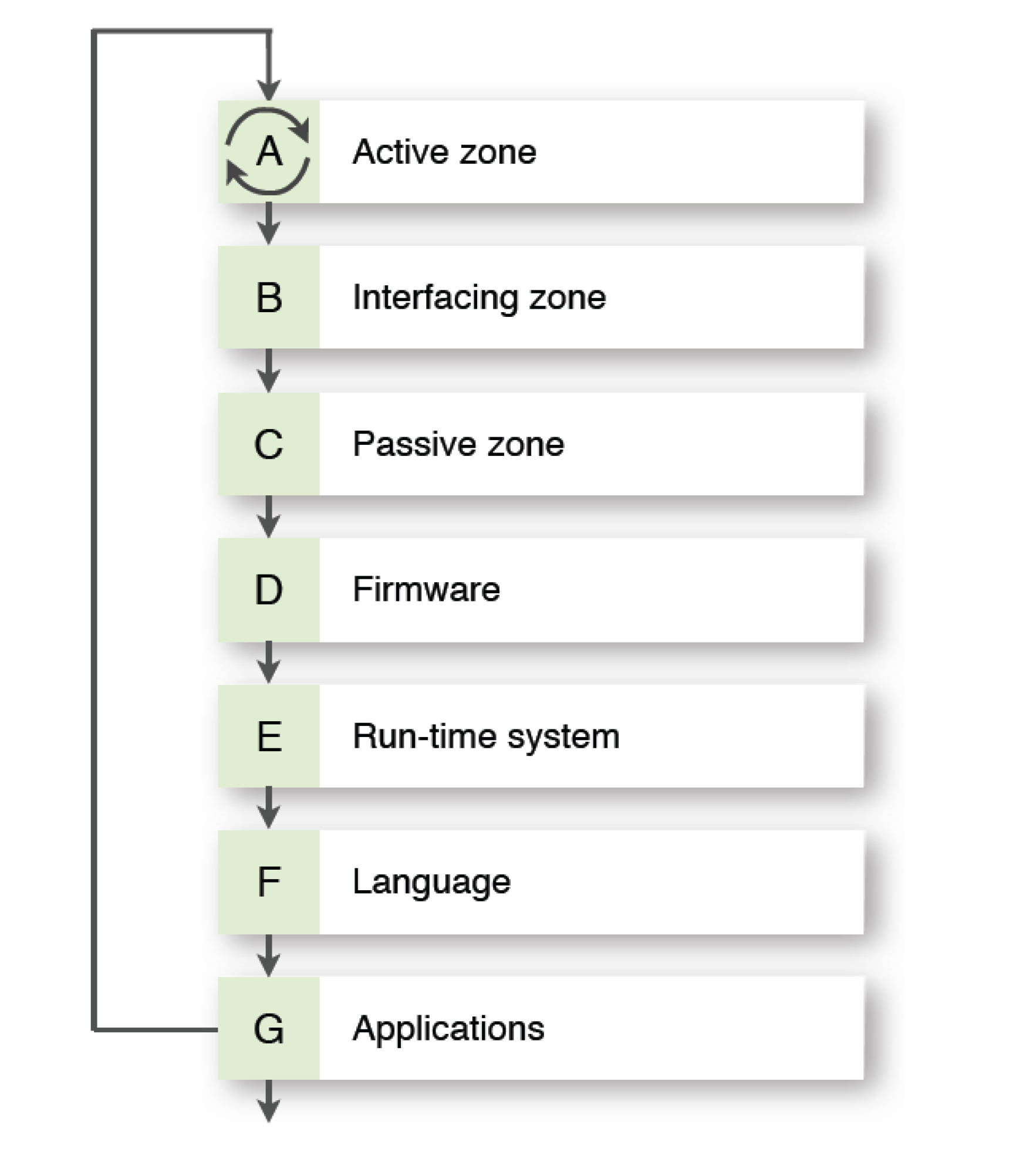
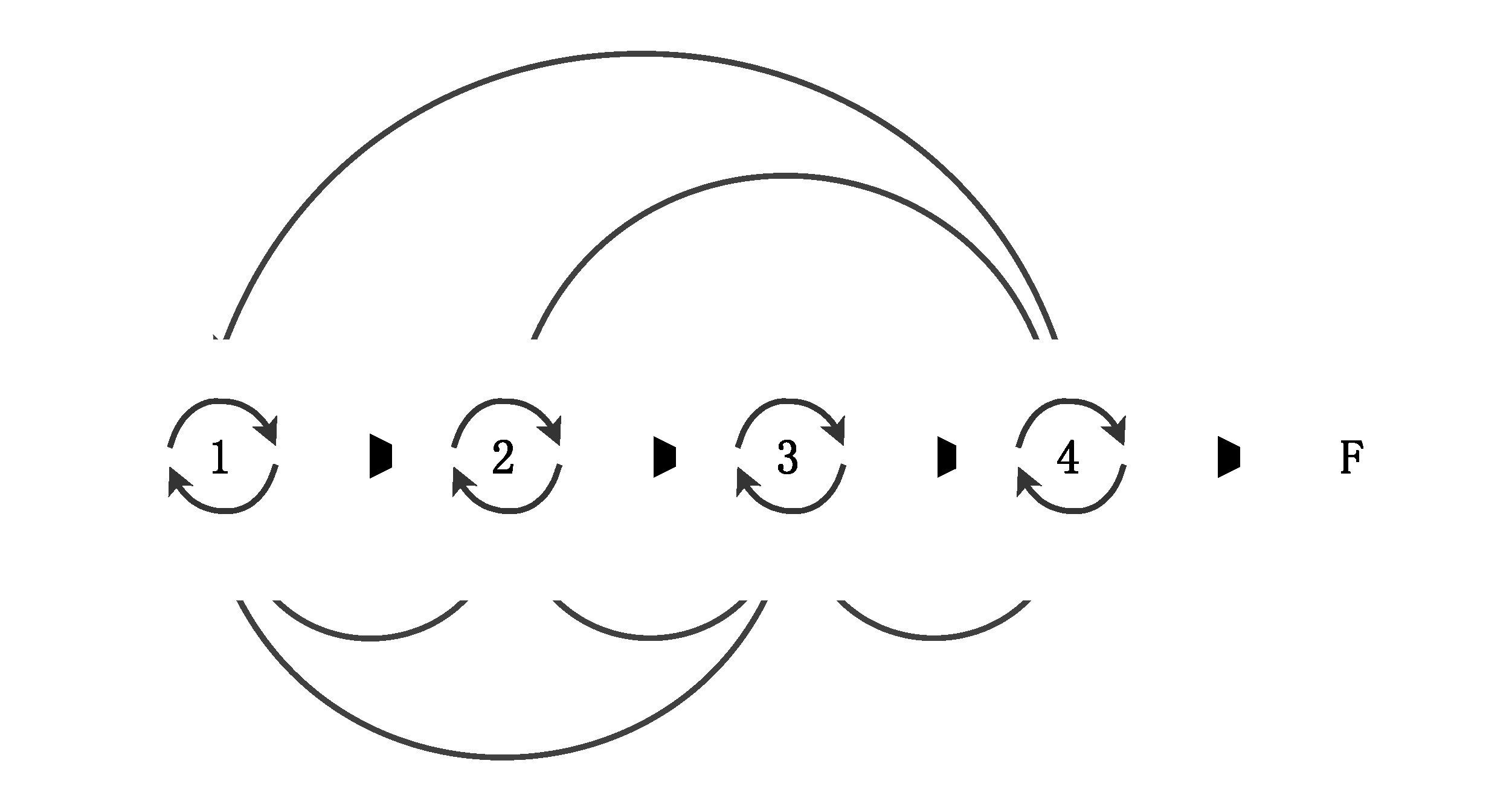
It is worth noting here that the combination of steps in the algorithms described above to implement the declared properties of Performance, Reliability, and Energy saving, are simplifications. The problem is that all these algorithmic implementations are not, in fact, simple sequences. They are most likely to follow a pattern, as presented in [
5] and illustrated by
Figure 8, where the various steps of the algorithms are dependent on and have feedback loops with other steps.
One approach to cope with these forms of dependencies in the algorithm (or project) phases was introduced in [
11], where a semi-Markov model was used to analyse the impact of these feedbacks on design efficiency.
Figure 7.
Performance improvement algorithm for PRE systems.
Figure 7.
Performance improvement algorithm for PRE systems.
Figure 8.
Dependencies of project phases.
Figure 8.
Dependencies of project phases.
2.3. Recoverability in Connected Computer Systems
Whilst the previous section expanded on the idea of a PRE-wise design for computers, it is tempting to apply the same approach to connected computers, making them suitable for real-time and safety-critical applications. It is possible to summarise the differences between computers and connected computer structures with the following:
- -
Redundancy in CC systems already exists (each computer “deals” with neighbour);
- -
Latency of threat impact for CC systems is unavoidable;
- -
Propagation of threat impact for CC systems is similar to flooding.
Let us look at how recoverability might be achieved in CC systems, applying the schemes proposed above.
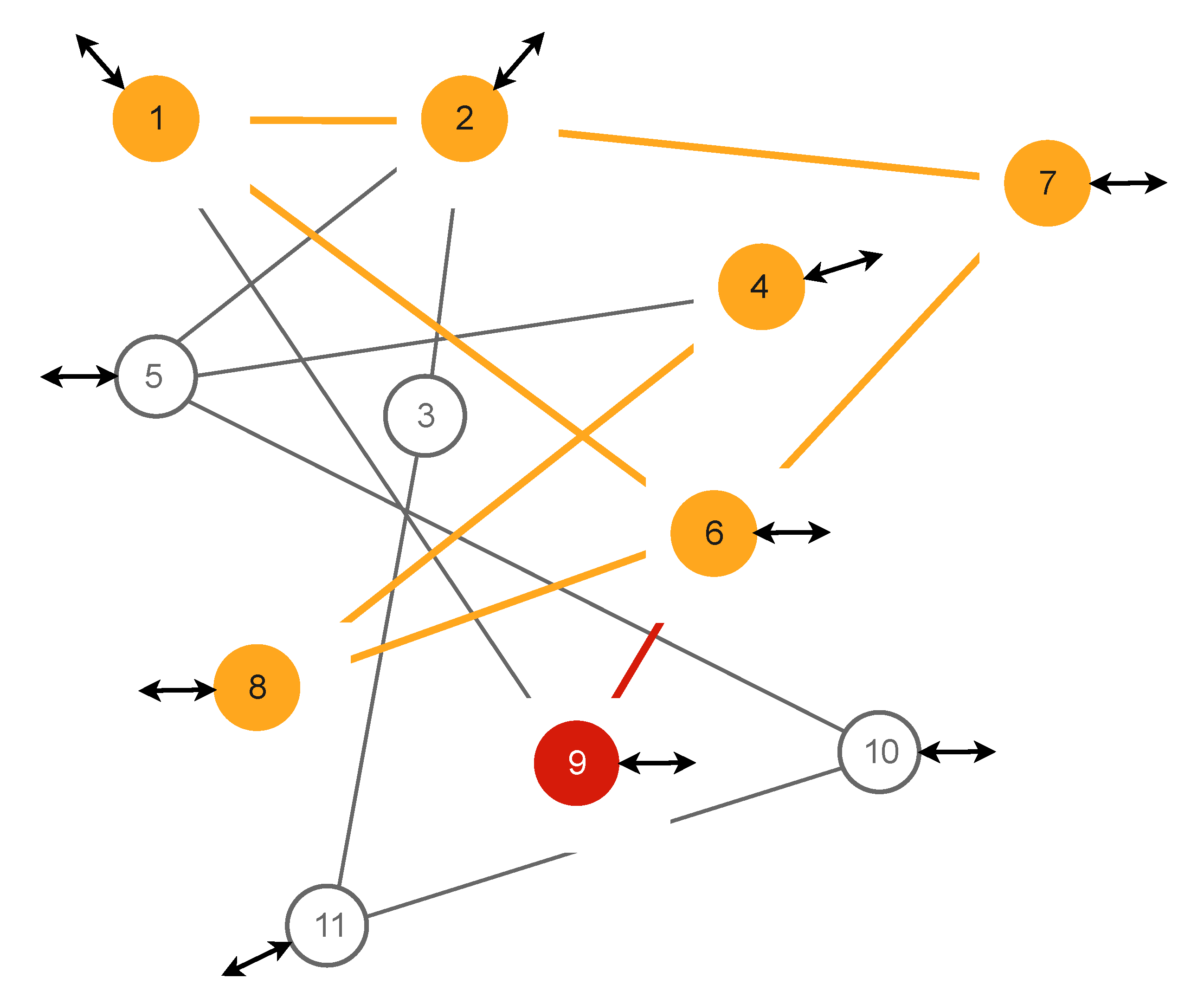
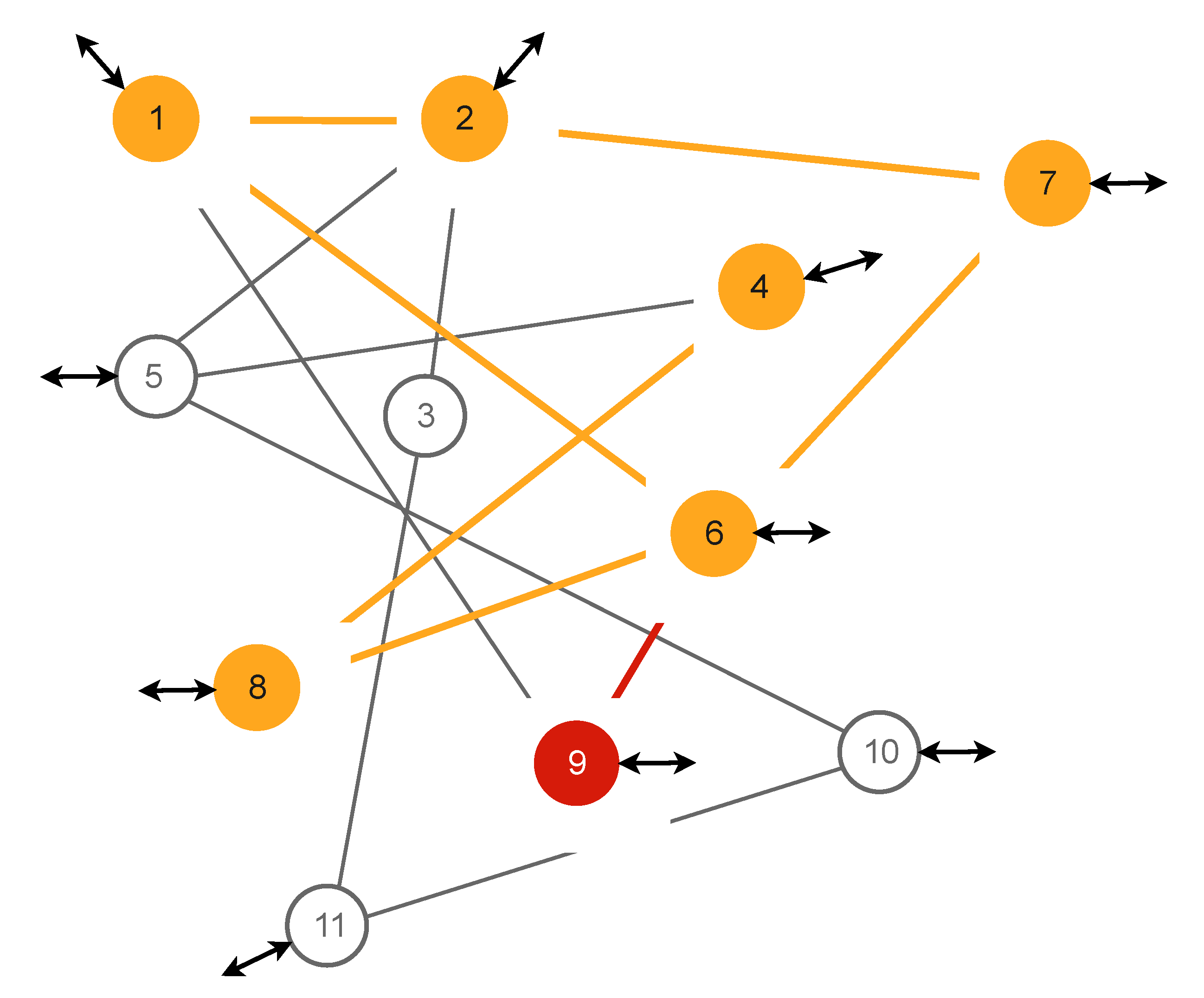
Figure 9 presents a notional segment of a CC topology with incoming and internal connections. Incoming and out-going edges are shown with arrows. At first glance, the structural redundancy of the topology (vertices and edges) is substantial and the application of this topology for safety critical and other serious applications might seem to be relatively straightforward.
However, any threat that appears inside the segment might cause serious problems as its propagation might also damage the structure as well as the elements. Threats here mean physical faults (permanent, or as a malfunction) of hardware, incomplete or deliberately damaged software, viruses, worms, etc.
Thus, the recoverability of a CC system might require more effort and extend GAFT actions, namely:
- -
Find where threat propagates;
- -
Estimate damages;
- -
Stop propagation;
- -
Find source of the threat (internal, or external);
- -
Exclude, or block the source;
- -
Restore best-fit configuration of hardware;
- -
Restore best-fit configuration of system software;
- -
Restore best-fit configuration of application software.
To make a system of CC useful for real-time applications, one has to introduce exactly the same procedures that form GAFT (
Figure 4) and do a little bit extra: analyse the possible damages, together with an estimation of the potential consequences for the topology of the CC, as well as its elements. The speed of propagation of a threat through the topology is a factor that defines the requirements for recovery. In addition, different segments in the topology might have dramatically different importance for the CC as a whole; for example, compare a gateway host with a simple internal router.
Figure 9.
Connected computers topology (fragment).
Figure 9.
Connected computers topology (fragment).
The potential damages caused as a result of the threat may differ in severity—sometimes substantial and exponentially dangerous, if we do not react accordingly. Existing solutions with local restarts and segmental switching do not comply with the requirements of real-time, or safety-critical applications. To evaluate the efficiency of recovery, we should introduce some criteria.
A CC system has a known interdependency of elements; we are able to present them in the form of probabilities of the possible propagation of a threat (or symptom of a fault) through the topology.
One form of this interdependency, is a graph where the elements are the vertices and the edges are the connecting links, see
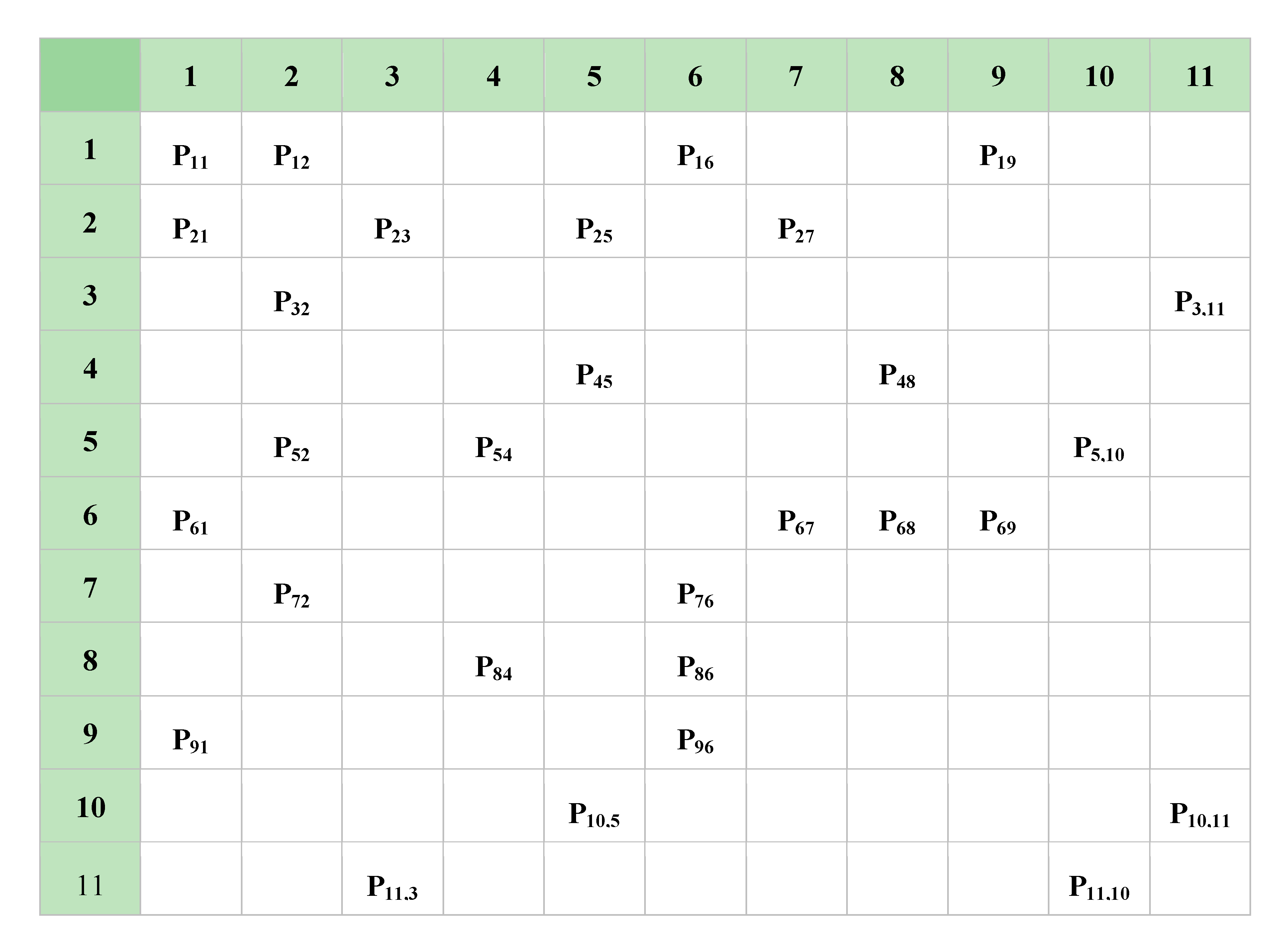
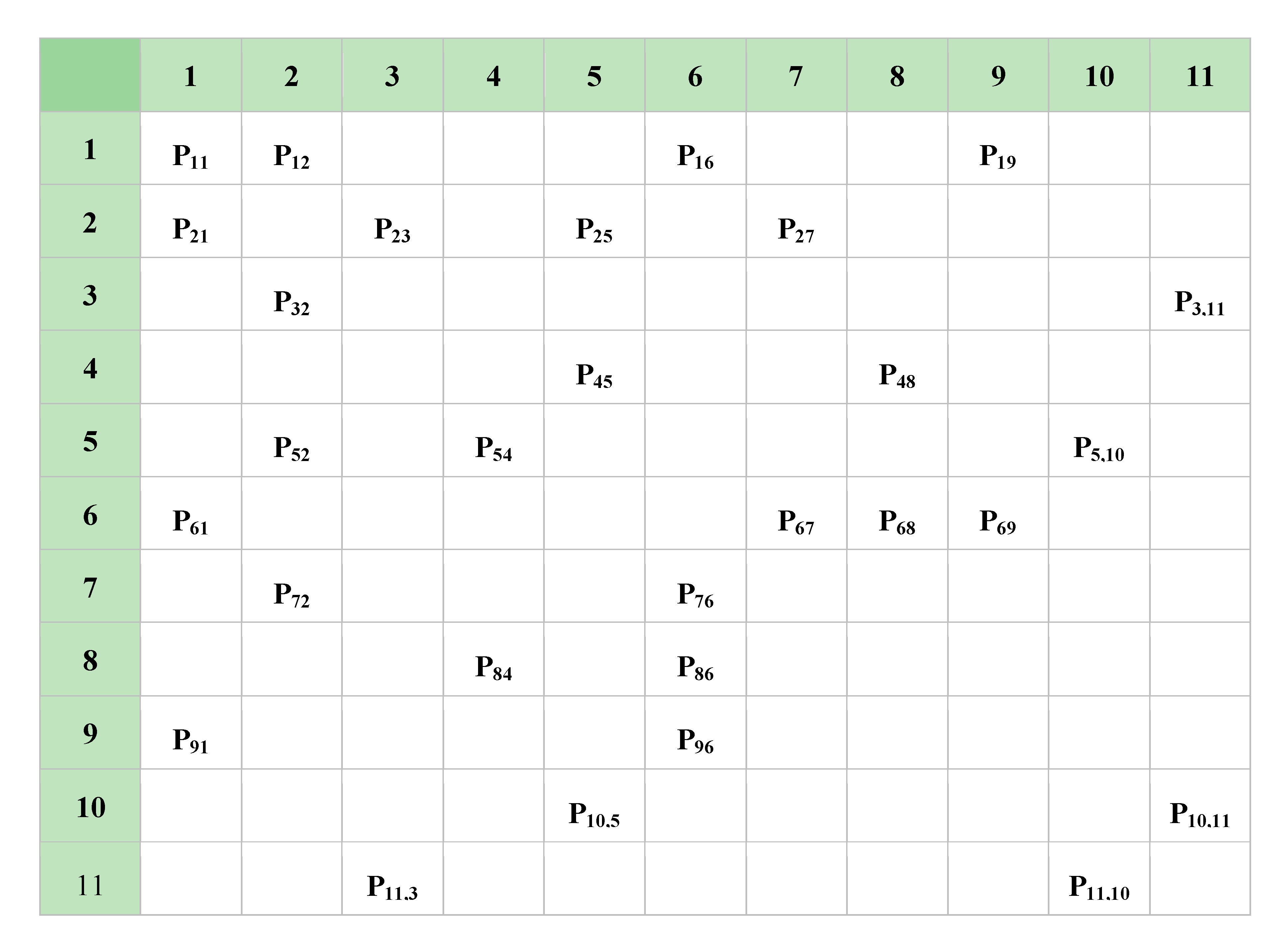
Figure 9. The thickness of the edges defines the strength of dependency between vertices. It is also worth mentioning that the dependencies between vertices are not symmetrical: vertex 9 might have, say, a much higher impact on vertex 6, than vertex 6 might have on vertex 9. Dependencies, in terms of “problem” propagation, might be presented as square, non-symmetrical matrices with indices representing the vertices and the contents representing dependencies, such as in
Figure 10 below.
“Involvement” in the propagation of a threat along the CC system might be described as a vector P of predicates {p
i} that define the condition for each vertex:
where m
1,...,m
k stand for models of vertices in terms of vulnerability to threat; v
1,...,v
k are vertices, d
1, ...,d
k are data available about each vertex condition.
Data about each vertex might be accumulated using checking (testing, or online checking, including historic knowledge and their combination), or processed in real time.
Note that for a CC system, we assume flood-like threat propagation; i.e. all adjacent vertices to the initial point, namely for vertex 1, one has to consider adjacency with the 2nd ,6th, and 9th vertices, vertex 11’s adjacency to vertex 3 and 10, etc. The role of the initial point that starts off the process of recovery requires further discussion.
Figure 10.
Probabilities of threat propagation along a CC system.
Figure 10.
Probabilities of threat propagation along a CC system.
2.4. How This Works
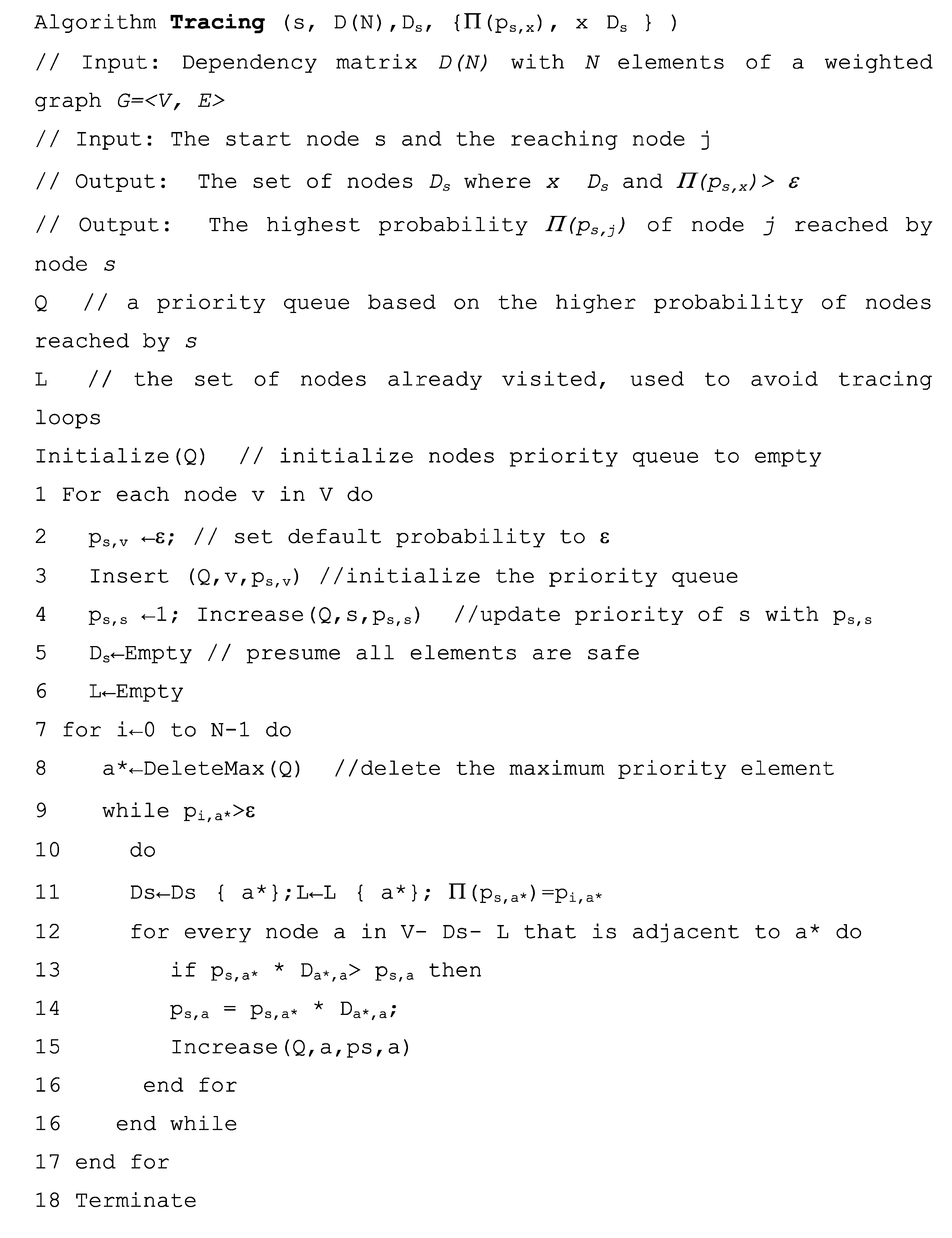
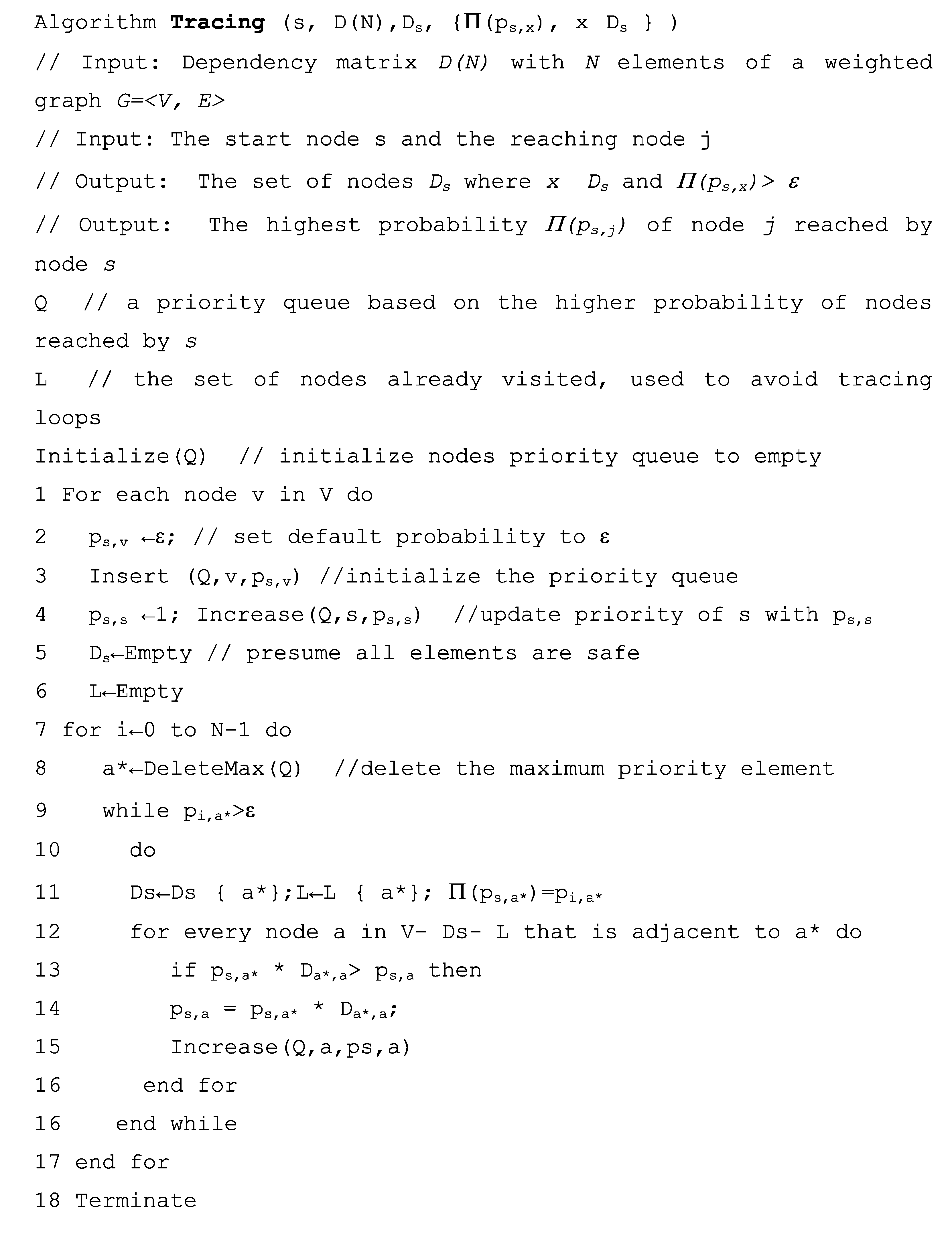
The recoverability of CC systems assumes the involvement of two algorithms: Forward Tracing and Backward Tracing. When the symptoms of a threat are manifested through the detection of a change in behaviour at an element, the Tracing algorithm (
Figure 11) searches through a Dependency Matrix for the subsequent propagation of that threat along the system. The potential consequences to the system can be hereby identified, starting from the vertex from where the threat presence was first detected.
Figure 9,
Figure 10 present an example of a threat dependency graph and its equivalent matrix. Performing the Forward Tracing algorithm, a cumulative probability is calculated along each possible path (of edges) until a termination threshold ε is reached. Threshold
ε is defined empirically using engineering expertise and considered as constant for a particular configuration of a CC.
Another termination condition for searching the path of threat propagation is obvious—checking all dependent vertices. When all elements have been traced, one can fully guarantee 100% threat checking coverage. Unfortunately, this termination condition might not be feasible, as it becomes scale-dependent on CC system size.
Note here that the probabilistic matrix in
Figure 10 is not Markovian, because the sum of probabilities on the edges at each node may not be equal to 1; in contrast, several edges of a single node may have significant probabilities.
Figure 11.
Forward tracing of possible consequences.
Figure 11.
Forward tracing of possible consequences.
2.5. Probability Along the Path
In the tracing algorithm, the cumulative probability of threat propagation from one element (vertex) to another along the edges from the suspected node i to node j (possibly via a series of other nodes), is defined as Π(pi,j).
When several paths lead from node d
i to node d
j, all possible Π(p
i,j) are ranked and nodes along the paths are included into the set of suspected nodes. This algorithm, called Forward Tracing, is shown in
Figure 11.
Starting from the vertex, i, that manifests the threat, its impact is evaluated by searching from d1 to all directly, or indirectly connected nodes (elements). The result of this search is a ranked list of the nodes most likely to be affected - the “consequence” of threat propagation. As the threat paths from each node are evaluated, only the edge with the highest probability is followed at each node. At most, each node is only ever included once in any path to ensure termination in a graph which contains loops.
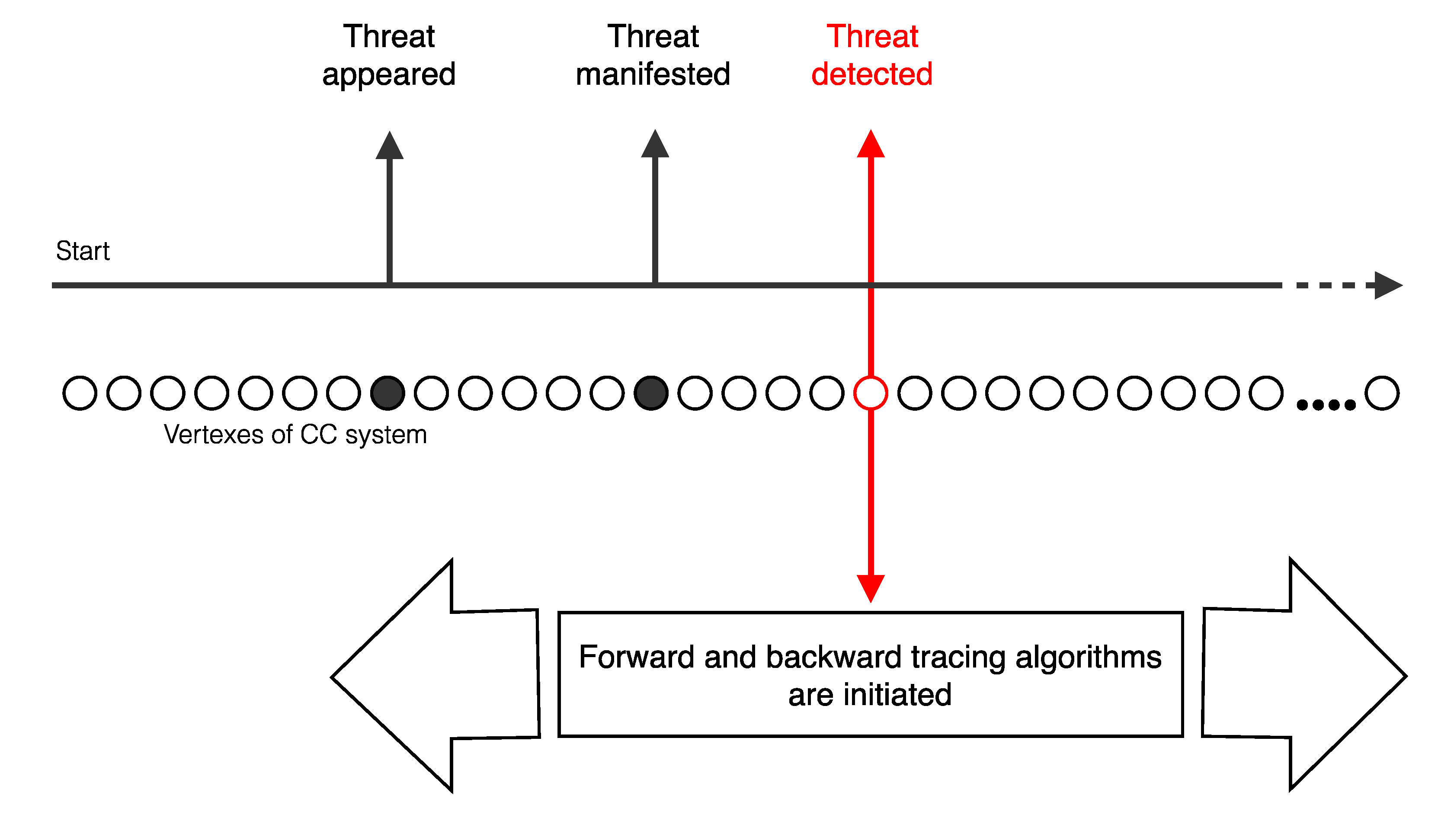
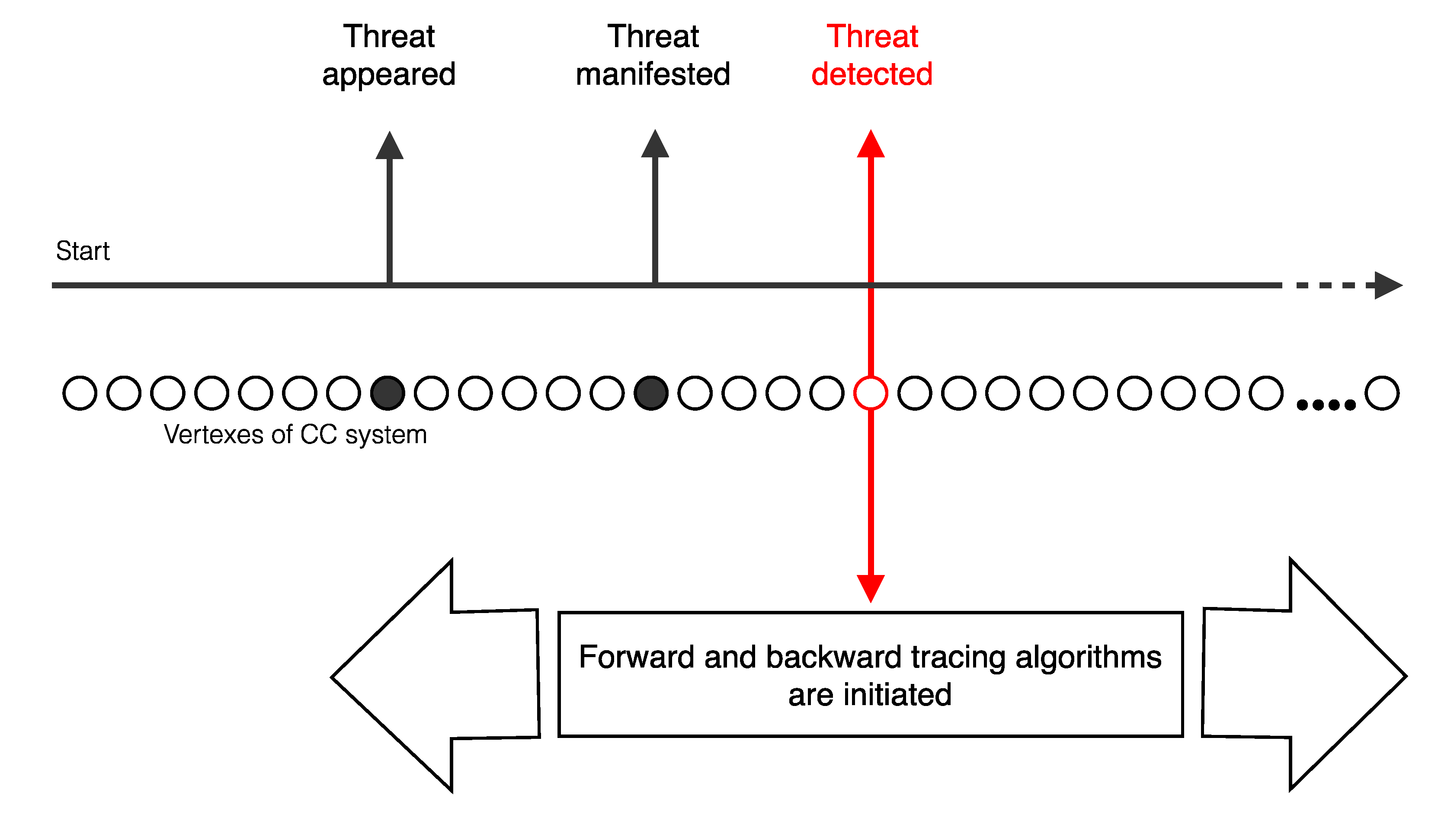
Unfortunately, the proposed Forward Tracing algorithm does not solve the problem of threat elimination from CC systems and, at its best, can only be part of the solution. The reason is explained in
Figure 12. The time gap between the appearance of a threat at one vertex and the detection of the threat impact at another has arbitrary duration. Above all, while the consequences are being detected, threat propagation continues. Thus, the Forward Tracing algorithm helps to localize damages, and assist when possible, in order to block propagation, but does not solve the whole problem.
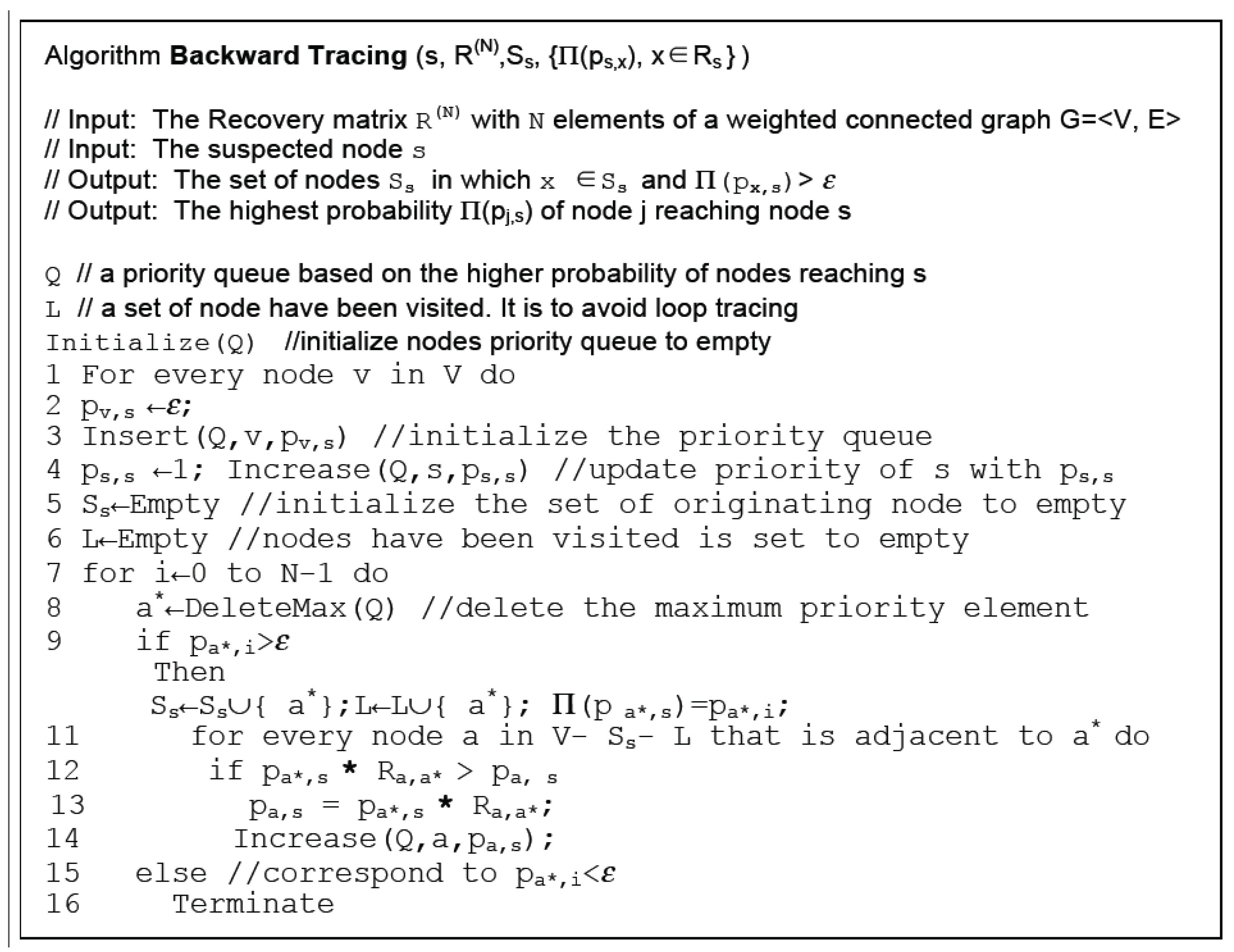
Another algorithm is required to locate the first damaged node and discover the real reason for its changed behaviour. This second algorithm, we will call Backward Tracing. The Backward Tracing algorithm is about searching for the reason—i.e., where and when the threat appeared in the CC system. When the Backward Tracing algorithm completes, we are able to describe the “level”, or area of damage caused by the threat and therefore reconfigure the CC system effectively. This algorithm discovers the source(s), or reason(s) from the sequences of exhibited threat symptoms and defines areas where each element (vertex) was involved.
Recoverability is achieved, when recovery is initiated from the vertex from where the threat first appeared. Thus, we search for the reason, not just the symptoms.
Backward tracing of the Dependency Matrix finds the elements that are likely to be the cause of the manifest discrepancies and detects a suspected element. The algorithm for Backward Tracing is presented in
Figure 13.
Usually, when a CC system failure is discovered, there is an emergency blocking procedure applied to the CC system as a whole, with further restart implemented—this is usual practice for CC system monitoring. However, the result of the Forward and Backward Tracing algorithms defines the recovery procedure for the damaged area only, reducing the need for the brute force of a restart and saving real-time mode for the whole system, if required.
When a threat and its propagation are excluded from the system, the recording of the event should be performed for maintenance purposes. Recovery actions from a list of legitimate and relevant actions should be applied automatically, or in extreme cases, with the reduced restart requirement of the CC system. The results of the recovery process also need to be saved for security improvement, monitoring of reliability and maintenance efficiency.
Figure 12.
Threat propagation timing along a CC system.
Figure 12.
Threat propagation timing along a CC system.
Figure 13.
Backward threat tracing for a CC system
Figure 13.
Backward threat tracing for a CC system
The threat checking procedure over a CC system might be activated, either by a signal indicating that there is a discrepancy in behaviour of one or more elements (vertices), or by a predefined sequence of maintenance, if necessary. When an element is “suspected”, a sequence of actions should be considered in order to interpret the unusual behaviour, or event, to prevent the further propagation of the threat that could put the whole CC system at risk. We call this procedure, “Threat Monitor”. It operates on the Dependency Matrix of the CC system, an example of which is shown in
Figure 9,
Figure 10. For the purpose of maintaining CC system integrity, the procedures for condition checking might be initiated by choosing any vertex of the CC system at random, or even in a loop covering all vertices.
When a distributed system has Forward Tracing and Backward Tracing algorithms applied to it, there may be a dynamic and active improvement in reliability and safety [
12]. Where recoverability is implemented, deviations in performance are smoothed out for the system as a whole.
2.6. How Much Recoverability Costs
As shown above, recoverability requires the introduction of several new processes into CC system management, including online checking of CC conditions and the implementation of Forward and Backward Tracing algorithms. Online checking is a real-time process over the CC system main elements and links (vertices and edges), system software and when and where possible, application software.
The aim of checking within a CC system is the detection of any degradation, or change in behaviour of that system. Once detected, the recovery process for the suspected elements can be initialised and the conservation of the CC system’s reliability and especially availability maintained, extending real-time applicability overall.
When full recovery is not possible, the preventive nature of the aforementioned actions reduces the level of danger, risk etc., assisting graceful degradation of service of the CC system for its users.
For CC systems, the Process of Checking (PC), reliability degradation and the execution of Forward Tracing and Backward Tracing (the latter two together called the Process of Maintenance, PM) are independent in principle; thus, they can be considered in parallel, as well as executed sequentially. The PC, or PM activity can be started when required, when possible, or just when convenient.
The main idea, here, is to carry out checking well in advance, keeping current mission reliability of the CC system at a higher threshold. It is clear that the combined processes of checking and recovery change the reliability of the CC system as a whole. The gradient of this change is a function of the quality of checking (coverage), success of recovery (algorithms of tracing) and quality of maintenance.
Maintenance might also include the execution of both tracing algorithms under harsher conditions, reconfiguring the CC system when necessary. In fact, we attempt to shift the CC system to real-time maintenance with preventive actions against threats.
The gain from introduced and implemented recoverability might be measured using a comparison of a standard CC system with a system that implements real-time maintenance. To analyse the impact of recoverability implementation on a CC system, we will follow notation from [
9] and assume:
- -
A constant failure rate;
- -
Maintenance (recovery procedures) are not ideal and coverage is less than 100%;
- -
Minimum acceptable reliability threshold is introduced as before.
Some other assumptions relate to the checking process. Formally, for CC systems, the mission reliability function with introduced recoverability and an online checking process, is based on the following assumptions:
- Assumption 1:
Coverage is not 100%. Coverage percentage is 100α%, where 0 < α < 1, and is assumed to be constant over all preventive maintenance actions.
- Assumption 2:
Preventive maintenance is instantaneous and doesn’t delay the CC system.
- Assumption 3:
A threshold, MR0, of acceptable mission reliability is given (fixed).
- Assumption 4:
TPM is not a constant, but a variable, actually a function of several variables, including α, λ and MR0.
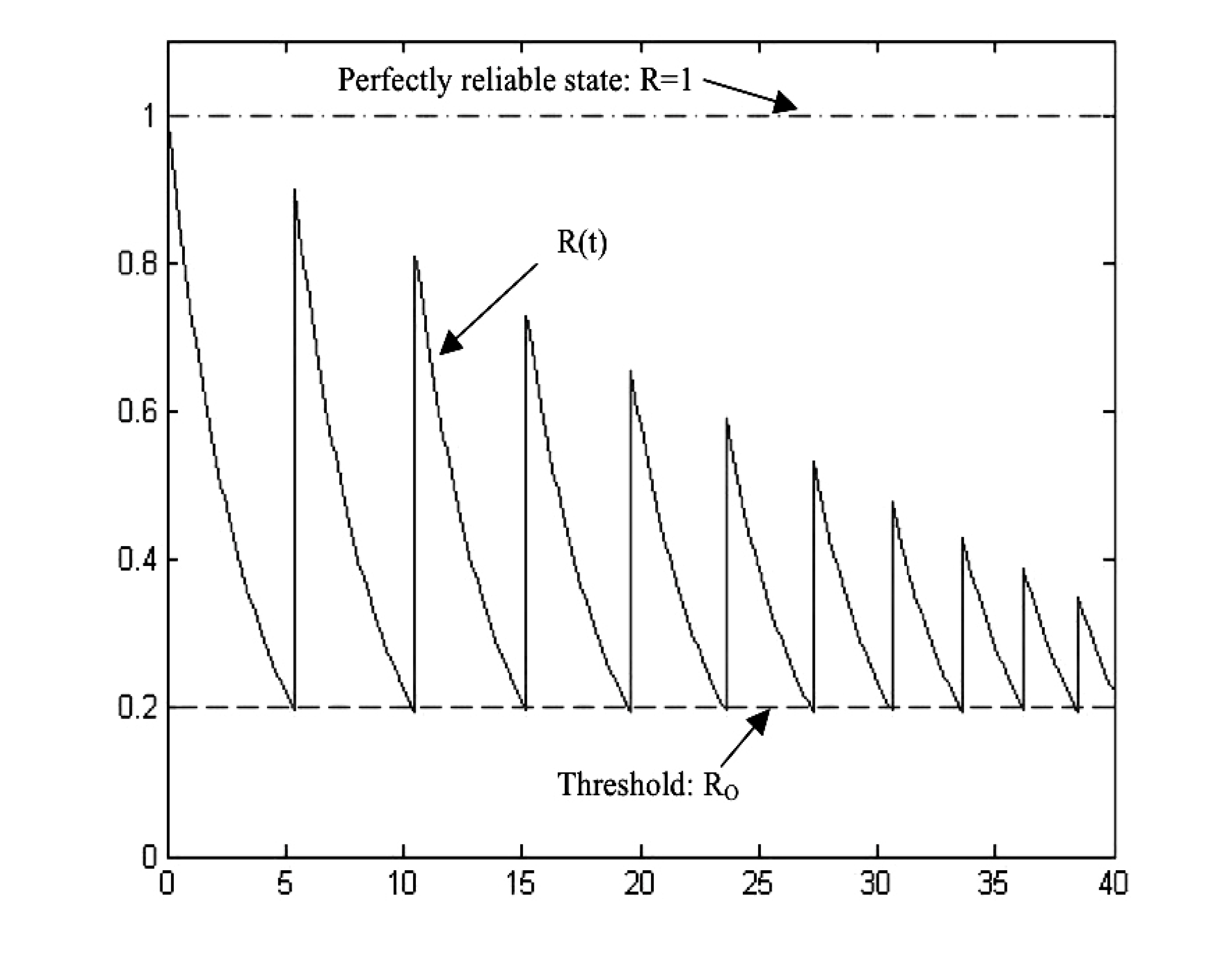
Mission reliability for a CC system can then be calculated as:
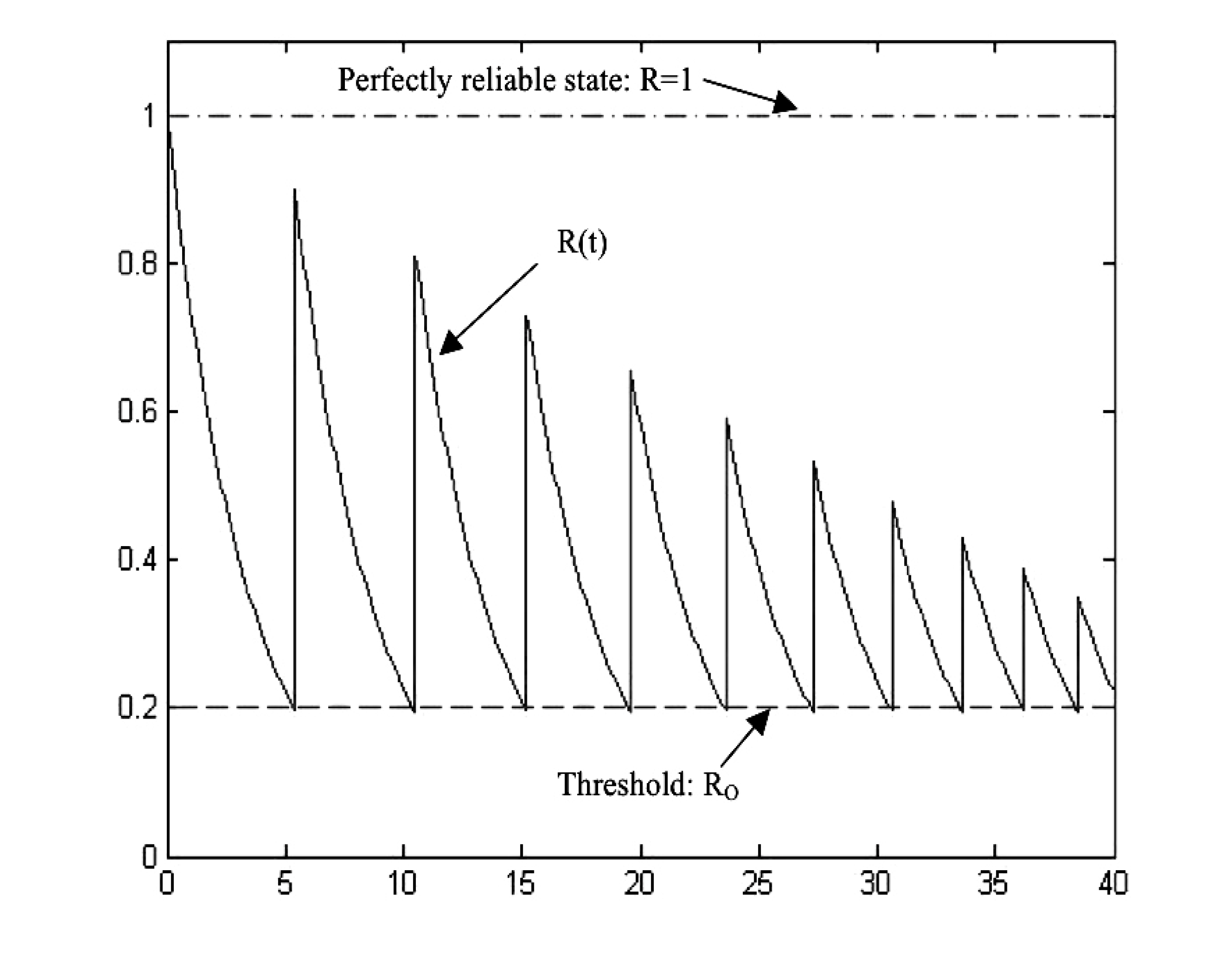
The resulting reliability curve for this case is presented in
Figure 14, assuming that maintenance takes place when the CC system reaches the threshold of mission reliability,
i.e., when: MR(
t) = MR
0.
Figure 14 is an example of a mission reliability function for a CC system under preventive periodic maintenance with incomplete coverage of checking, where the solid curve is the mission reliability curve, the dashed line is the threshold defined by the requirements of the CC system operations and the dot-and-dash line indicates the perfect, reliable state of the CC system. In
Figure 14, once a checking period arrives, the latest system states are measured and analysed. After each online-checking process, the latest CC system state is available and therefore, the awareness and confidence about the system both recover a little bit (subject to no faults being detected) and so does the reliability curve.
When the reliability of a CC system reaches the threshold, maintenance is carried out, according to existing network monitoring schemes. The rate of mission reliability degradation is a gain of recoverability implementation in the CC system. When no preventive maintenance takes place for a long time, the reliability of the CC system reaches the lower threshold Ro rapidly.
Figure 14.
Mission reliability for a CC system with incomplete coverage.
Figure 14.
Mission reliability for a CC system with incomplete coverage.
2.7. Recoverability Implementation Using Online Checking and Recovery
As mentioned already, real-time online checking and recovery should be introduced into the process of CC system monitoring. Online checking is a process of real-time checking of the system’s main elements, including hardware (the vertices and edges in
Figure 9) and software. The aim of checking is the detection of degradation, or change in behaviour. If and when possible, it also includes the recovery of the suspected element(s) and therefore, the conservation of the system’s mission reliability and availability.
As above, the main idea here is to carry out checking well in advance, providing the CC system with the highest mission reliability in real time. The introduction of a mission reliability function for a CC system, with an assumption of real-time maintenance (online checking and recovery actions), needs some assumptions as well:
- Assumption 1:
Coverage of real-time maintenance is limited. Coverage is αM100%, where, 0 < αM < 1, and αM is assumed a constant.
- Assumption 2:
Threshold for mission reliability, or availability MR0 exists for MR(t)
- Assumption 3:
Online checking process with period TPC is introduced. TPC is a constant.
- Assumption 4:
After each online checking, the confidence about a CC system’s condition is increased, therefore MR(t) grows as αC100%, while 0 < αC < 1 and αC is a constant.
- Assumption 5:
The period between two successive inspections is TPM(i). TPM(i) is a variable, actually a function of i, R0, αC, αM, λ and TPC.
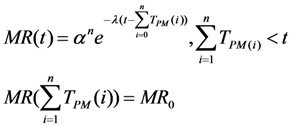
With these assumptions in mind, the mission reliability function for a CC system might be calculated as:
As mentioned previously, checking and recovery actions might be scheduled independently from the other processes inside the CC system; see
Figure 15.
Figure 15.
Backward threat tracing for a CC system.
Figure 15.
Backward threat tracing for a CC system.
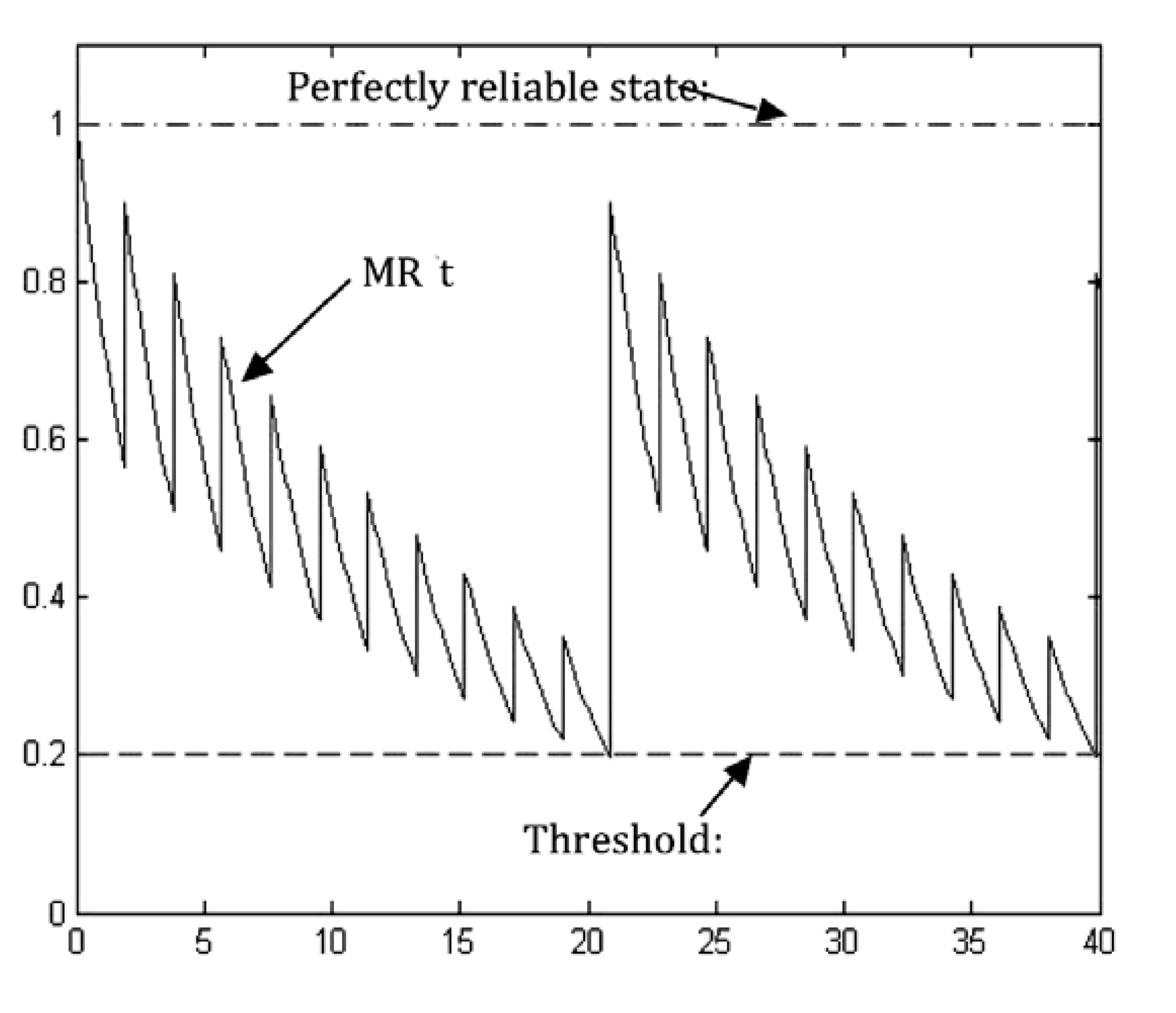
Comparisons of the lifespan of a CC system under a known maintenance strategy, as well as under the proposed new scheme, can be executed using integration of reliability over a given time period.
In practice, this means the volume of the area bounded by the mission reliability curve and the reference axes. The main reason for this index is to show how reliable a CC system is during a given period of time.
The integration values of mission reliability under conditional maintenance and preventive maintenance are calculated by Equations 4 and 5, respectively:
where MR
CM and MR
PM are given by Equations 2 and 3.
The efficiency of the preventive over conditional maintenance, can be assessed as:
assuming T
1 = T
2 in order to compare the reliability of CC systems with implemented conditional maintenance and preventive maintenance (and recovery), within the same period of time.
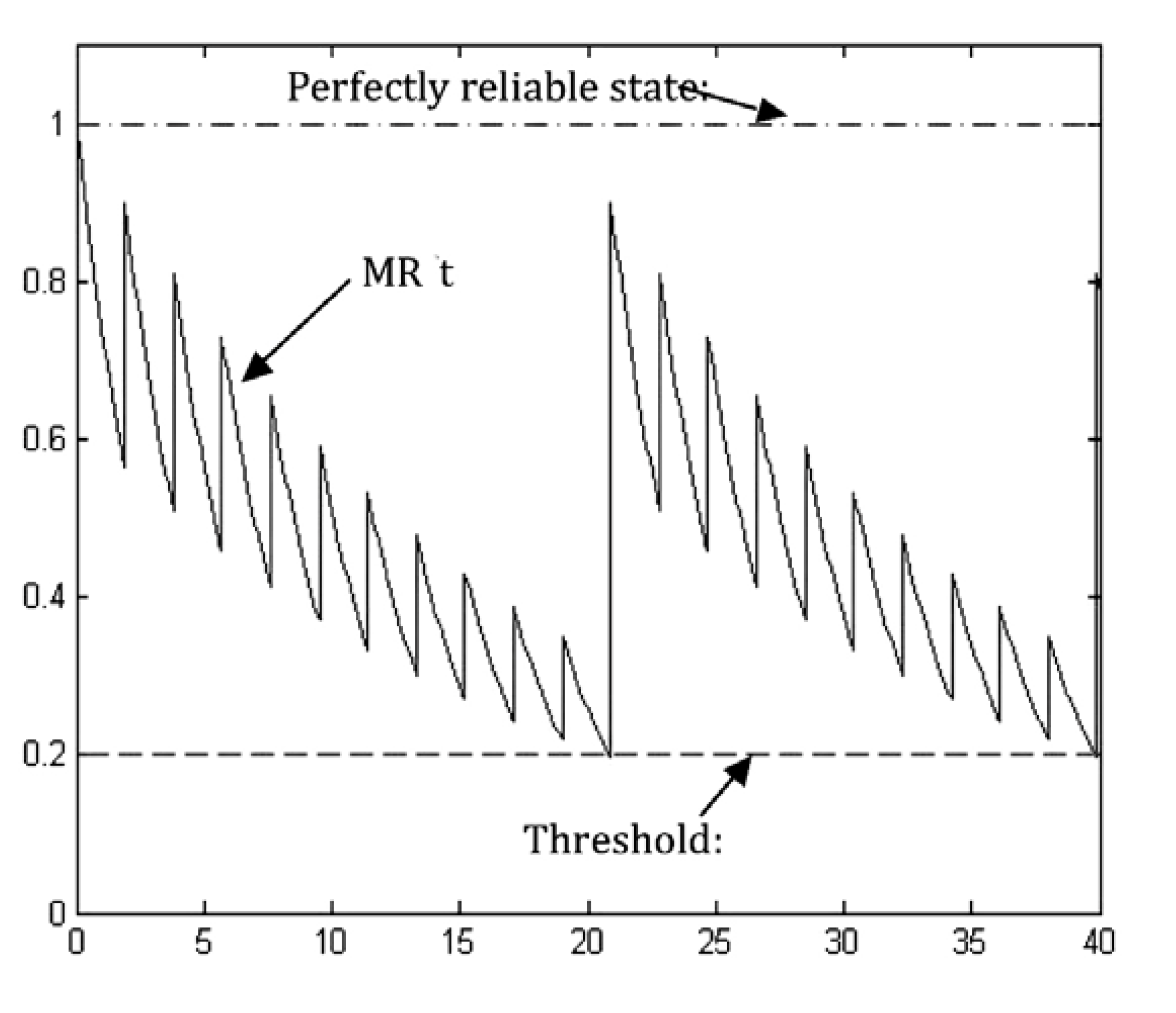
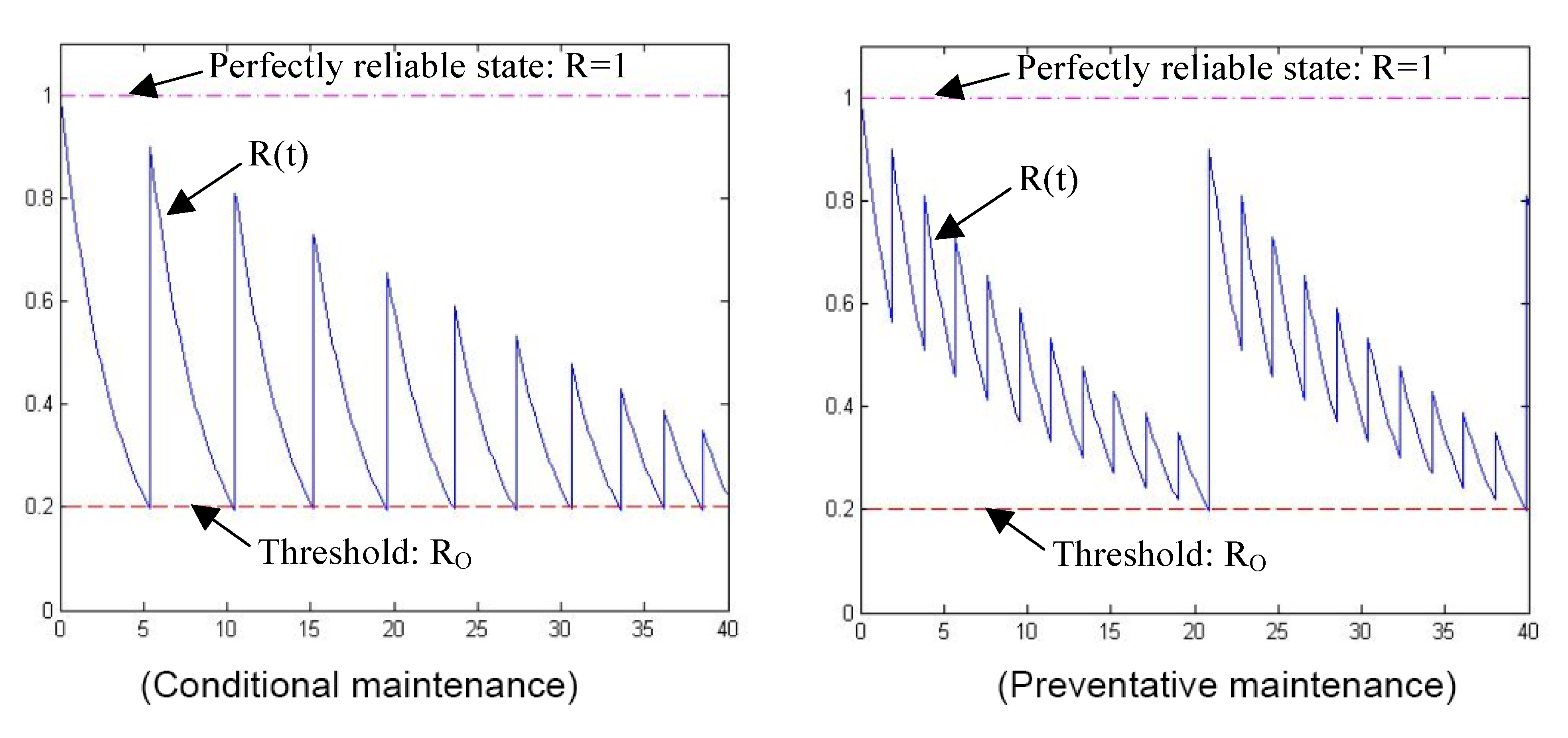
Figure 16 gives an example of such a comparison, where T
1 = T
2 = 40. According to Equations 4 and 5: V
CM(40) = 15.5961, V
PM(40) = 18.5084 and Y(40) = 0.1867. V
PM(40) >V
CM(40) means that in the specified 40 units of time period, the CC system that implements preventive maintenance has a 20% higher mission reliability.
Figure 16.
Efficiency of conditional and preventative maintenance.
Figure 16.
Efficiency of conditional and preventative maintenance.
Figure 16 also demonstrates that the time between two sequential maintenance sessions increases for preventive maintenance, which infers a significant reduction in maintenance costs. In other words, recoverability, implemented as described in this paper, substantially extends the resilience of a CC system, improving its performance for real-time applications.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}