Abstract
Embedded systems are widely used in automotive electronics, smart home, smart medical, aerospace and other fields. Aiming at the problem of formal modeling and verification analysis of embedded systems, a solution is proposed using extended Petri net reduction operations. Petri net based representation for embedded system (PRES+) and the object-oriented technology are combined to obtain the object-oriented PRES+ (OOPRES+). Two kinds of subnet reduction rules of OOPRES+ are presented. The preservation of boundedness and liveness of the reduction net system has been investigated to alleviate the problem of state space explosion of OOPRES+. The modeling and analysis of the embedded control system of a smart restaurant is used as an example to verify the effectiveness of the subnet reduction rules. Results obtained can provide an effective way to examine the reduction property of Petri net systems, and present a powerful means to model and verify the large-scale complex embedded systems.
1. Introduction
With the rapid development of modern information technology, embedded system is undoubtedly one of the most popular technologies at present, and has been widely used in automotive electronics, smart home, smart medical, aerospace and other fields. In order to improve the design efficiency and reliability of embedded systems, it is necessary to conduct formal modeling and analysis of embedded systems.
In terms of embedded system modeling methods, traditional modeling methods mostly use informal modeling methods, which can basically describe the functional properties of the system, but it is not easy to strictly verify by mathematical methods. The formal method describes the properties of the system with symbols and mathematical language, and can describe and verify the system in a systematic way [1]. The formal modeling methods widely used mainly include: extended finite state machine method [2], data flow diagram method [3], Petri net method [4], entity-relationship diagram method, etc. These formal modeling methods describe the characteristics of embedded systems from different aspects, but do not form a unified standard.
Aiming at the problem of formal modeling and verification analysis of embedded systems, a solution is proposed using the object-oriented PRES+ (OOPRES+) reduction operations in this paper. The preservation of liveness and boundedness of the reduction net system has been investigated to alleviate the problem of state space explosion of OOPRES+. Results obtained can provide a powerful means to model and verify the large-scale complex embedded systems.
2. Related Works
Embedded systems are widely used in many fields. The research and application of embedded systems have become increasingly important. Most of aircrafts have systems for collision avoidance systems, navigation, flight data recorder, automatic flight control, monitoring systems as well as weather radar system. Embedded computer systems with increasing memory requirements are used in all of above systems. To reduce the electricity consumed by these systems, Weisberg et al. [5] suggested detecting the portion of the actually used computer memory. The other portion can be temporarily turned off and turned on again when needed. Lenhardt et al. [6] present algorithms for calculating a power-efficient distribution of a divisible workload, heterogeneous physical servers. The calculated algorithms can minimize the power consumption.
To improve the design efficiency of embedded systems, it is necessary to model and verify embedded systems. Petri net has a clear mathematical definition and strict specification of derivation rules, which is a relatively sound formal modeling method. Classical Petri nets can model systems with concurrency, conflict and uncertainty, but there are the following shortcomings in embedded system modeling: no hierarchy, no consideration of time factors and limited ability to describe data flow. In order to overcome these shortcomings, domestic and foreign scholars have investigated and proposed a variety of extended forms of Petri nets for embedded system modeling and analysis, such as colored nets [7], PRUE (Petri net based on unified representation), time Petri nets [8], fuzzy Petri nets [9], timed double-flow Petri nets, etc. These extended forms of Petri nets improve the ability to model and analyze embedded systems based on different application requirements, but there are still some problems. For example, although the token of colored net has information and hierarchical description ability, there is no clear time characteristic. Although time can be attached to the token, there is semantic inconsistency. Time Petri nets have time characteristics, but the tokens do not have information.
PRES+ (Petri net based representation for embedded systems) [10] has a hierarchical structure and the ability to analyze data flow. Real-time characteristics can be captured by the time delay attached to the transition and the timestamp in the token, but it is not convenient for modular modeling of large-scale complex embedded systems.
Object-oriented technology can effectively divide large-scale complex systems into multiple simple subsystems and model them accordingly. In order to facilitate the modular modeling of large-scale complex embedded systems, an Object-Oriented Petri net based Representation for Embedded System (OOPRES+) is obtained by integrating object-oriented technology and PRES+.
OOPRES+ can be used for formal modeling and analysis of embedded systems. However, with the increase of system scale and complexity, the state space increases exponentially, and the problem of “state space explosion” will be encountered, which seriously affects the application of OOPRES+ in the modeling and analysis of large-scale complex embedded systems. The problem of state space explosion is NP-hard and cannot be completely solved, but it can be alleviated by using some property preserving transformations.
Synthesis [11,12,13,14,15], reduction [16,17,18,19,20,21,22,23,24], and refinement [25,26,27,28,29] are three commonly used Petri net transformation methods. Reduction is an important transformation method. There have been many researches on Petri net reduction. Berthomieu et al. [16,17] proposed a method to count the number of reachable markings of a Petri net, and reduce the number of transitions and places in a system. Ceška et al. [18] focused on how to use an object-oriented Petri nets partial-order reduction approach to alleviate the state space explosion problem. Shah et al. [19] focused on reduction of the colored Petri net (CPN) model of a flexible manufacturing system to reduce the total number of elementary circuits. Chiachío et al. [20] introduced a method based on Approximate Bayesian Computation to infer the plausible values of the model parameters of the simplified model in a rigorous probabilistic way. Bønneland et al. [21] described the structure reduction techniques used in reachability queries on weighted Petri net with inhibitor arcs. Xia [22] proposed a set of reduction rules for the PRES+ model to preserve total equivalence. Xia et al. [23] proposed several reduction rules for Petri net with inhibitor arcs based representation for embedded systems (PIRES+). Li et al. [24] proposed several reduction rules for the bounded labeled Petri nets (LPNs). Under certain conditions, these reduction rules can preserve the diagnosability of the LPN system.
The above research works have played certain roles in the property analysis and system modeling of Petri nets, but OOPRES+ is a newly proposed extended Petri net, and its reduction operation has not been systematically studied. The property preservation reduction operation can alleviate the state space explosion problem of OOPRES+, and realize the formal modeling and analysis of large-scale complex embedded systems. Therefore, it is necessary to conduct in-depth research on it.
In this paper, two reduction rules of OOPRES+ are proposed, and the necessary and sufficient conditions for the reduction operation to preserve the boundedness and liveness of the original net system are presented. The reduced net system is obtained by reducing the original OOPRES+ net system according to the given reduction rules. The reduction rules can make the reduced net system have the same boundedness and liveness as the original net system, so that the relevant properties of the large system can be investigated with the small systems without the analysis of the reachable space, so as to alleviate the explosion of the state space of the OOPRES+.
3. Basic Concepts
In this section, we propose some related concepts of OOPRES+.
Definition 1.
A PRES+ model is , where is a non-empty finite set of places, is a non-empty finite set of transitions, is a non-empty finite set of input arcs, is a non-empty finite set of output arcs. is a marking, which indicates the distribution of tokens in the place. is a token, where is the token value, and is the token time.
Figure 1 shows an example of the PRES+ model. For the example, in Figure 1, , , , , is the initial marking, , .
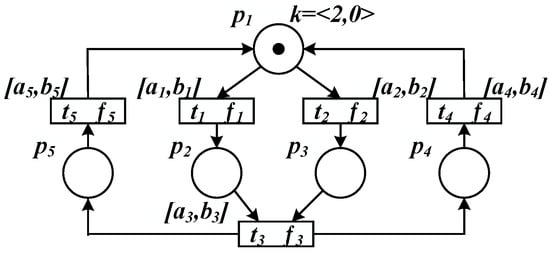
Figure 1.
An example of PRES+ model.
Definition 2.
For every transition , there exists a transition function , i.e., , where is a type function that associates with every place, where , .
Definition 3.
For every transition , there exists a minimum transition delay and a maximum transition delay , both of which are non-negative real numbers and , where and represent the lower and upper bounds on the execution time of the transition function associated with the transition .
In Figure 1, the transition functions associated with the transitions are , and the transition delays are , respectively.
Definition 4.
An OOPRES+ subnet is a six-tuple , where is a non-empty finite set of places, denoted by ; is a non-empty finite set of transitions, denoted by , and for each transition , there exists a transition function and transition time delay corresponding to it; is the input arc set; is the output arc set; is the weight function, which defines the weight size on the flow relationship, and the default value is 1; is the set of message places, denoted by .
The message place that receives messages from the subnet and transmits them to the gateway is called the output place (denoted by ), and the message place that receives the messages from the gateway and transmits them to the subnet is called the input place (denoted by ).
Figure 2 shows an example of the OOPRES+ subnet, where , , is the initial marking, , , where is the input message place and is the output message place.
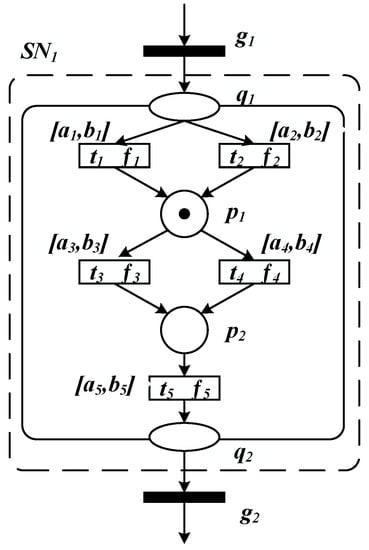
Figure 2.
An example of OOPRES+ subnet.
Definition 5.
An OOPRES+ net is a four-tuple , where is the subnet set of OOPRES+ (where the place set, the transition set, and the messages place set are denoted by , , and , respectively.); is the flow relation between subnets and gateways, including two parts and , where , ; is a set of gateways; is the system making, and the initial marking is .
Definition 6.
Let be an OOPRES+ net system with , and is the initial marking.
- (i)
- For transition, if , then is said to be enabled under if and only if
- (ii)
- For , if , then is said to be enabled under , if and only if it satisfies formula (2).
- (iii)
- The system marking changes after the firing of transition : , where
Definition 7.
Let an OOPRES+ net system be , with as the initial marking and , then
- (i)
- A transition is said to be live if for every , there exists , such that .
- (ii)
- An OOPRES+ net system is said to be live if, for system , , is live.
Definition 8.
Let an OOPRES+ net system be , and the initial marking, , , then
- (i)
- A place is said to be bounded if there exists a positive integer such that . A message place is said to be bounded if there exists a positive integer such that .
- (ii)
- An OOPRES+ net system is said to be bounded if, for a system , and , and are bounded.
4. Subnet Reduction Rules and Property Analysis of OOPRES+
In this section, we present two internal subnet reduction rules of the OOPRES+ net system, and propose the necessary and sufficient conditions for the reduced OOPRES+ net systems to preserve liveness and boundedness.
4.1. Q-Type Internal Subnet Reduction
In this section, we will introduce the Q-type internal subnet reduction rule of the OOPRES+. Figure 3 is an example of this reduction rule.
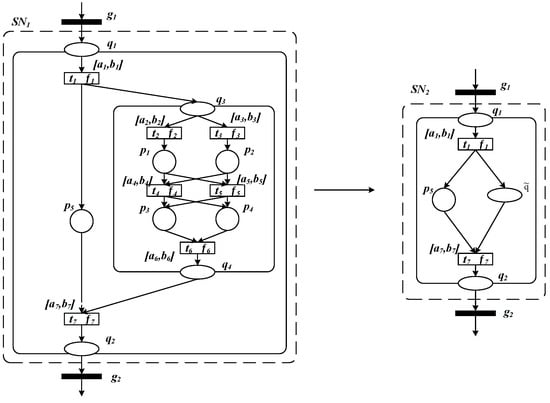
Figure 3.
An example of Q-type internal subnet reduction rule.
Definition 9.
Let
be a subnet of OOPRES+ net system
. is called a Q-type internal subnet of
, if and only if the following conditions are satisfied.
- (i)
- ;
- (ii)
- ;
- (iii)
- ;
- (iv)
- {} , where is the only input message place of and is the only output message place of .
For the transition set of Q-type internal subnet , there exists the transition function . Take Figure 3 as an example. Transitions , , and are sequence relations. Transitions , , and are sequence relations. Transition sets and are parallel relations. So, (where the symbol represents compound operation, and represents parallel operation).
For the transition set of Q-type internal subnet , there exists a minimum transition time delay and a maximum transition time delay , both of which are non-negative real numbers and satisfy . Take Figure 3 as an example. Transitions , , and are sequence relations. Transitions , , and are sequence relations. Transition sets and are parallel relations. So, , .
Based on the transition function of the transition set , the transition time delay, and the token information in the input place , the token information in the output place can be calculated.
Definition 10.
(Q-type internal subnet reduction rule) Suppose is a subnet of OOPRES+ net system . Let the reduced subnet be obtained from using message place to replace the internal subnet of where,
- (i)
- ;
- (ii)
- ;
- (iii)
- ;
- (iv)
- ;
- (v)
- ;
- (vi)
- The token information in is the same as the token information in .
Supposition 1.
In the OOPRES+ net system
, suppose that each transition of the Q-type internal subnet
is live and each place of
is bounded.
Theorem 1.
Let OOPRES+ net system be obtained from by reducing the Q-type internal-subnet of the subnet of . Then is bounded if and only if is bounded.
Proof.
(If) since is bounded, then , there exists a positive integer such that , and , there exists a positive integer such that . Obviously, there exist positive integers and , such that (where is the vector after removing the relevant component of of , and ) is the vector after removing the relevant component of of ). Similarly, there exist positive integers and , such that . By Definition 10, . Let , then such that ; such that .
(Only-if) Since is bounded, according to Definition 10, the remaining places of the net system are bounded by removing the Q-type internal subnet . By Supposition 1, the Q-type internal subnet is bounded. So, the net system is bounded. □
Theorem 2.
Let OOPRES+ net system be obtained from by reducing the Q-type internal-subnet of the subnet of . Then is live if and only if is live.
Proof.
(If) since is live, then , is live. Since , , then is live. It can be seen that after removing the internal subnet from , the system is still live. According to Definition 10, , is live. Thus, the net system is live.
(Only-if) Since the net system is live, according to Definition 10, the token information in is the same as that in . By Supposition 1, each transition of the Q-type internal subnet is live, therefore, the net system is live. □
Note that in the subnet of the net system , if there are multiple Q-type internal subnets, as long as these internal subnets do not have the same pre-set and post-set, the above Q-type internal subnet reduction rule can still be used to reduce the net system and preserve the boundedness and liveness of the original net system.
Corollary 1.
Suppose is a subnet of the net system . In , there exists a Q-type internal subnet set , where , (where ). Let be obtained from using Q-type internal subnet reduction rule to reduce the Q-type internal subnet set of , then is bounded and live if and only if is bounded and live.
For the subnet set of the net system , if these subnets do not have the same pre-set and post-set between them, and there are multiple disjoint Q-type internal subnets in each subnet, the net system can be reduced using the Q-type internal subnet simplification rule, and the boundedness and liveness of the original net system can still be preserved.
Corollary 2.
Suppose is a subnet set of the OOPRES+ net system , where , (where ). There exists a Q-type internal subnet set of , where (where ). Let be obtained from using Q-type internal subnet reduction rule to reduce the Q-type internal subnet set of , then is bounded and live if and only if is bounded and live.
4.2. TQ-Type Internal Subnet Reduction
In this section, we will introduce the TQ-type subnet reduction rule of the OOPRES+. Figure 4 is an example of this reduction rule.
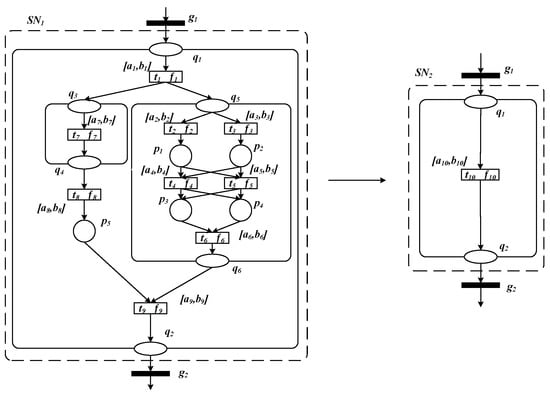
Figure 4.
An example of TQ- type internal subnet reduction rule.
Definition 11.
Let be a subnet of OOPRES+ net system . is called a TQ-type internal subnet of , if and only if the following conditions are satisfied.
- ;
- ;
- ;
- ;
- { } , where is the only input transition and is the only output transition.
For the transition set of TQ-type internal subnet , there exists the transition function . Take Figure 4 as an example. Transitions and are parallel relations. Transitions and are parallel relations. Transition sets and are sequence relations. So, .
For the transition set of TQ-type internal subnet , there exists a minimum transition time delay and a maximum transition time delay , both of which are non-negative real numbers and satisfy . Take Figure 4 as an example. Transitions and are parallel relations. Transitions and are parallel relations. Transition sets and are sequence relations. So, ,(.
Definition 12.
(TQ-type internal subnet reduction rule) Suppose is a subnet of OOPRES+ net system . Let the reduced subnet be obtained from using transition to replace the TQ-type internal subnet of where,
- (i)
- ;
- (ii)
- ;
- (iii)
- ;
- (iv)
- ();
- (v)
- () }) ;
- (vi)
- ;
- (vii)
- , .
Supposition 2.
In the OOPRES+ net system
, suppose that each transition of the TQ-type internal subnet
is live and each place of
is bounded.
Theorem 3.
Let OOPRES+ net system be obtained from by reducing the TQ-type internal-subnet of the subnet of . Then is bounded if and only if is bounded.
Proof.
(If) since is bounded, then , there exists a positive integer such that , and , there exists a positive integer such that . Obviously, there exist positive integers , such that ( is the vector after removing the relevant component of of , and is the vector after removing the relevant component of of ). According to Definition 12, and . Thus, , , , .
(Only-if) Since is obtained from using the TQ- type internal subnet rule to reduce the TQ-type internal subnet of , according to Definition 12, and . By Supposition 2, and are bounded. Since is bounded, then both and are bounded. Therefore, both and are bounded. In summary, the OOPRES+ net system is bounded. □
Theorem 4.
Let OOPRES+ net system be obtained from by reducing the TQ-type internal-subnet of the subnet of . Then is live if and only if is live.
Proof
(If) Since is live, then , is live. Since , then , is live. According to Supposition 2, in the net system , each transition of the TQ-type sub-internet is live. By Definition 12, , , and , therefore, is live. Since , then , is live, i.e., the net system is live.
(Only-if) Since is live, then is live. According to Definition 12, , , . By Supposition 2, it follows that in , each transition of is live. Since the net system is obtained from using the TQ- type internal subnet reduction rule to replace the transition with the internal subnet , then the net system is live. □
Note that in the subnet of the net system , if there are multiple TQ-type internal subnets, as long as these internal subnets do not have the same pre-set and post-set, the above TQ-type internal subnet reduction rule can still be used to reduce the net system and preserve the boundedness and liveness of the original net system.
Corollary 3.
Suppose is a subnet of the net system . In there exists a TQ-type internal subnet set , where , (where ). Let be obtained from using TQ-type internal subnet reduction rule to reduce the TQ-type internal subnet set of , then is bounded and live if and only if is bounded and live.
Further, for the subnet set of the net system , if these subnets do not have the same pre-set and post-set between them, and there are multiple disjoint TQ-type internal subnets in each subnet, the net system can be reduced using the TQ-type internal subnet reduction rule, and the boundedness and liveness of the original net system can still be preserved.
Corollary 4.
Suppose is a subnet set of the OOPRES+ net system , where , (where ). There exists a TQ-type internal subnet set of , where (where ). Let be obtained from using Q-type internal subnet reduction rule to reduce the TQ-type internal subnet set of , then is bounded and live if and only if is bounded and live.
5. Application
This section applies the proposed OOPRES+ reduction rules to the modeling and analysis of the embedded control system of a smart restaurant, and verifies the reliability and effectiveness of the proposed reduction rules.
In the following, an OOPRES+ is applied to model and analyze a smart restaurant embedded control system. Figure 5 shows the net system OOPRES+ model of this embedded control system. The four control modules of reservation, meal dispensing, purchasing and decision making are modeled as object subnet systems , respectively.
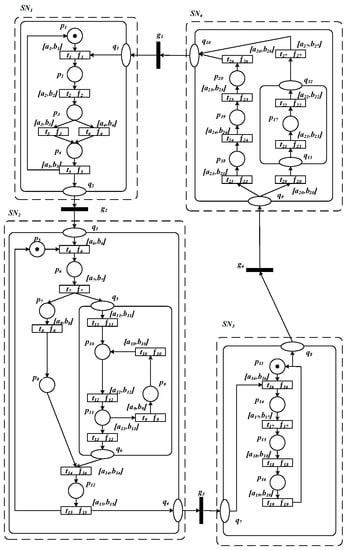
Figure 5.
Embedded control system model of a smart restaurant .
In Figure 5, : request restaurant data; : obtain display data; : submit meal data; : submit evaluation data; : complete data upload; : submit meal preparation data; : complete data upload;: make production plans; : request inventory data; : obtain inventory data; : submit raw material data; : submit inventory transfer data;: complete data upload; : submit recipe data; : complete data upload; : request to obtain purchase data; : obtain purchase data; : submit order data;: complete data upload;: request purchase data; : obtain procurement data; : upload costing data; : request access to evaluation data; : obtain evaluation data; : submit feedback data; : complete evaluation data upload; : complete procurement data upload. : gateway; : the transition function of the corresponding transition; : the transition time delay of the corresponding transition. By Definitions 7 and 8, the net system is bounded and live.
As shown in Figure 6, the Q-type internal subnet (generated by {}) of of the OOPRES+ net system model is reduced to the message place , and then the reduced net system is obtained. It is easy to see that each place of this Q-type internal subnet is bounded and each transition is live. By Theorems 1 and 2, the net system is bounded and live if and only if is bounded and live.
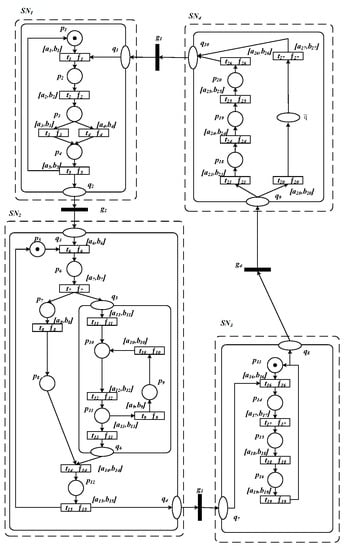
Figure 6.
obtained using the Q-type internal subnet reduction rule.
As shown in Figure 7, the TQ-type internal-subnet (generated by { of , the TQ-type internal subnet (generated by {}) of , the TQ-type internal subnet (generated by }) of , and the TQ-type internal subnet (generated by }) of of the OOPRES+ net system model are reduced to the transitions , , , and , respectively, and then the reduced net system is obtained. It is easy to know that each place of the above four the TQ-type internal subnets is bounded and each transition is live. Since the above the TQ-type internal subnet reductions satisfy the conditions of Theorems 3 and 4, it is easy to see that the net system is bounded and live if and only if is bounded and live.
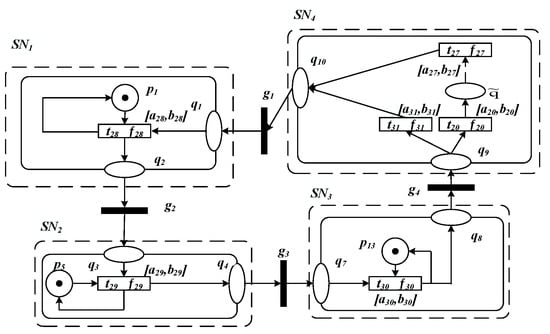
Figure 7.
obtained using the TQ-type internal subnet reduction rule.
Note that, the boundedness and liveness of the OOPRES net system , and in Figure 5, Figure 6 and Figure 7 can also be verified by the modeling tool software Tina 3.7.0. (Tina 3.7.0 is a simulation tool used only for simulation analysis and viewing property analysis results.) The verification of boundedness and liveness of the original OOPRES+ net system and the reduced OOPRES+ net system can be seen from Figure 8, Figure 9, Figure 10 and Figure 11.
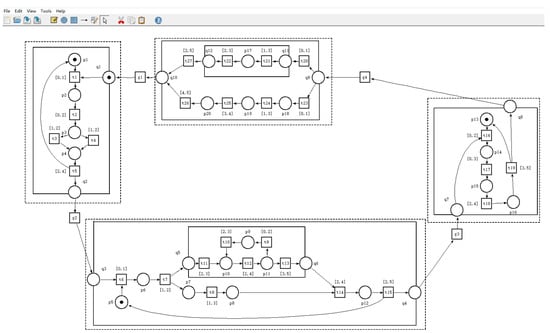
Figure 8.
The original smart restaurant model in Tina.
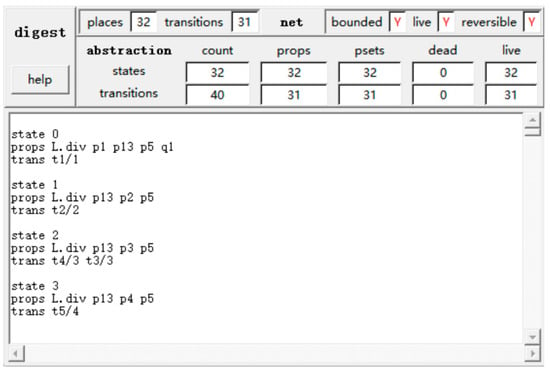
Figure 9.
Verification result of the boundedness and liveness of .
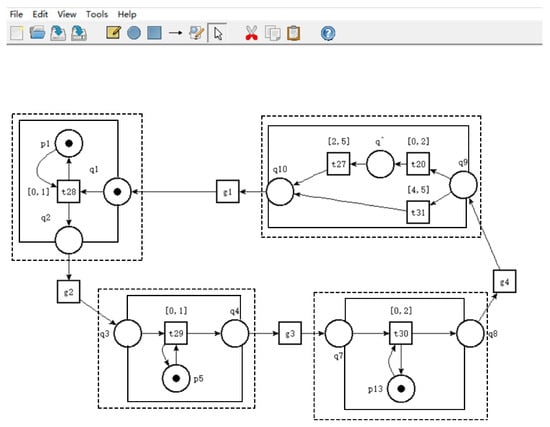
Figure 10.
The reduced smart restaurant model in Tina.
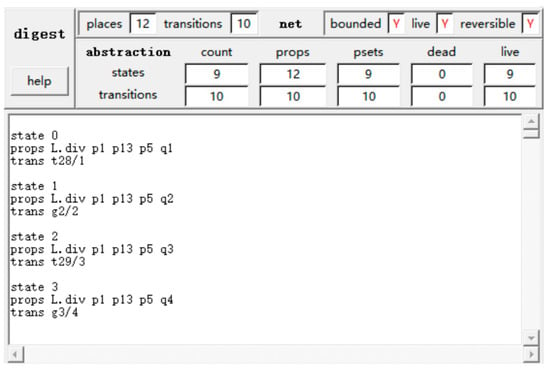
Figure 11.
Verification result of the boundedness and liveness of .
It can be seen from Figure 9 and Figure 11 that the original smart restaurant OOPRES+ model and the reduced OOPRES+ model are all bounded and live.
In summary, the original OOPRES+ net system is reduced by using the Q-type internal subnet reduction rule and the TQ-type internal subnet reduction rule. Some sufficient and necessary conditions for the reduction rules given in this paper can make the target network system keep the boundedness and liveness of the original network system unchanged, so that the boundedness and liveness of the original network system can be studied with the reduced net system, and the purpose of studying the large system with the small system can be achieved, so as to alleviate the “state space explosion” problem of the OOPRES+ net system.
6. Conclusions
Aiming at the problem of formal modeling and verification analysis of embedded systems, this paper presents two internal-subnet reduction rules of an object-oriented PRES+ (OOPRES+), and investigates the problem of preserving the liveness and boundedness of the reduction operation. This paper proposes certain necessary and sufficient conditions for the reduction operation to preserve the boundedness and liveness of the original net system, and applies these reduction rules to the modeling and analysis of the intelligent restaurant embedded control system. The research results of this paper will provide a new way for the analysis of large-scale complex embedded system model.
The next research work is to give broader conditions and investigate the preservation of other important properties (such as timing, reachability, and functionality) of the reduction operations of OOPRES+.
Author Contributions
Conceptualization, C.X. and Y.S.; methodology, C.X.; validation, C.X., Y.S. and B.S.; formal analysis, C.X. and Y.S.; investigation, C.X. and B.S.; resources, C.X.; writing—original draft preparation, C.X.; writing—review and editing, Y.S. and M.G.; visualization, B.S.; supervision, C.X.; project administration, C.X.; funding acquisition, C.X. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the Natural Science Foundation of Shandong Province (Grant:ZR2022MF348).
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Marwedel, P. Embedded System Design—Embedded Systems Foundations of Cyber-Physical Systems, and the Internet of Things, 4th ed.; Springer: Cham, Switzerland, 2021. [Google Scholar]
- Tausan, N.; Markkula, J.; Kuvaja, P.; Oivo, M. Choreography in the embedded systems domain: A systematic literature review. Inf. Softw. Technol. 2017, 91, 82–101. [Google Scholar] [CrossRef]
- Stoutchini, A.; Benini, L. StreamDrive: A dynamic dataflow framework for clustered embedded architectures. J. Signal Process Syst. 2019, 91, 630–640. [Google Scholar]
- Ding, Z.; Yang, R.; Cui, P.; Zhou, M.C.; Jiang, C. Variable Petri nets for mobility. IEEE Trans. Syst. Man Cybern. Syst. 2022, 52, 4784–4797. [Google Scholar] [CrossRef]
- Weisberg, P.; Wiseman, Y. Efficient memory control for avionics and embedded systems. Int. J. Embed. Syst. 2013, 5, 225–238. [Google Scholar] [CrossRef]
- Lenhardt, J.; Schiffmann, W.; Eitschberger, P.; Keller, J. Power-efficient load distribution in heterogeneous computing environments. In Proceedings of the International Conference on Parallel and Distributed Computing and Networks, Innsbruck, Austria, 17–19 February 2014; pp. 239–248. [Google Scholar]
- Coronado, E.; Valero, V.; Orozco-Barbosa, L.; Pelayo, F.L. Modeling and simulation of the IEEE 802. 11e wireless protocol with hidden nodes using colored Petri nets. Softw. Syst. Model. Softw. Syst. Model. 2021, 20, 505–538. [Google Scholar]
- Bozhenkova, E.N.; Virbitskaite, I.B. Testing equivalences of time Petri nets. Program. Comput. Softw. 2020, 46, 251–260. [Google Scholar] [CrossRef]
- Kiaei, I.; Lotfifard, S. Fault section identification in smart distribution systems using multi-source data based on fuzzy Petri nets. IEEE Trans. Smart Grid 2020, 11, 74–83. [Google Scholar] [CrossRef]
- Cortés, L.A.; Eles, P.; Peng, Z. Modeling and Formal Verification of Embedded Systems Based on A Petri Net Based Representation. J. Syst. Archit. 2003, 49, 571–598. [Google Scholar] [CrossRef]
- Ahmed, A.; Koutny, M. Pietkiewicz-Koutny. Synthesising elementary net systems with localities. Theor. Comput. Sci. 2022, 908, 123–140. [Google Scholar]
- Rostock, U.; Informatik, I.F.; Informatik, T. Synthesis of Petri Nets with Restricted Place-Environments: Classical and Parameterized. In Application and Theory of Petri Nets and Concurrency. PETRI NETS 2021; Buchs, D., Carmona, J., Eds.; LNCS 12734; Springer: Cham, Switzerland, 2021; pp. 292–311. [Google Scholar]
- Liu, G.; Li, P.; Li, Z.; Wu, N. Robust deadlock control for automated manufacturing systems with unreliable resources based on Petri net reachability graphs. IEEE Trans. Syst. Man Cybern. Syst. 2018, 49, 1371–1385. [Google Scholar] [CrossRef]
- Hu, H.; Su, R.; Zhou, M.C.; Liu, Y. Polynomially complex synthesis of distributed supervisors for large-scale AMSs using Petri nets. IEEE Trans. Control Syst. Technol. 2016, 24, 1610–1622. [Google Scholar] [CrossRef]
- Xia, C.; Li, C. Property preservation of Petri synthesis net based representation for embedded systems. IEEE/CAA J. Autom. Sin. 2021, 8, 905–915. [Google Scholar] [CrossRef]
- Berthomieu, B.; Botlan, D.L.; Zilio, S.D. Counting Petri net markings from reduction equations. Int. J. Softw. Tools Technol. Transf. 2020, 22, 163–181. [Google Scholar] [CrossRef]
- Berthomieu, B.; Botlan, D.L.; Zilio, S.D. Petri net reductions for counting markings. In SPIN 2018; Gallardo, M.M., Merino, P., Eds.; Springer: Cham, Switzerland, 2018; LNCS 10869; pp. 65–84. [Google Scholar]
- Ceška, M.; Haša, L.; Vojnar, T. Partial-order reduction in model checking object-oriented Petri nets. In Computer Aided Systems Theory—EUROCAST 2003; Moreno-Díaz, R., Pichler, F., Eds.; Springer: Berlin/Heidelberg, Germany, 2003; pp. 265–278. [Google Scholar]
- Shah, S.A.; Bohez, E.L.; Shah, K.; ul Haq, I.; Azam, K.; Anwar, S. Colored Petri net model for significant reduction of invariants in flexible manufacturing systems. Int. J. Adv. Manuf. Technol. 2017, 88, 1775–1787. [Google Scholar]
- MChiachío; Saleh, A.; Naybour, S.; Chiachío, J.; Andrews, J. Reduction of Petri net maintenance modeling complexity via Approximate Bayesian Computation. Reliab. Eng. Syst. Saf. 2022, 222, 108365. [Google Scholar]
- Bønneland, F.M.; Dyhr, J.; Jensen, P.G.; Johannsen, M.; Srba, J. Stubborn versus structural reductions for Petri nets. J. Log. Algebraic Methods Program. 2019, 102, 46–63. [Google Scholar] [CrossRef]
- Xia, C. Reduction rules for Petri Net based representation for embedded systems. J. Front. Comput. Sci. Technol. 2008, 2, 614–626. [Google Scholar]
- Xia, C.; Zhang, W.; Wang, Z. Reduction rules for Petri net with inhibitor arcs based representation for embedded systems. In Proceedings of the 2019 International Conference on Computer Science, Communications and Big Data (CSCBD 2019), Beijing, China, 24–25 March 2019; pp. 408–413. [Google Scholar]
- Li, B.; Khlif-Bouassida, M.; Toguyéni, A. Reduction rules for diagnosability analysis of complex systems modeled by labeled Petri nets. IEEE Trans. Autom. Sci. Eng. 2020, 17, 1061–1069. [Google Scholar] [CrossRef]
- Bernardinello, L.; Lomazova, I.; Nesterov, R.; Pomello, L. Property-preserving transformations of elementary net systems based on morphisms. In Transactions on Petri Nets and Other Models of Concurrency XVI; Koutny, M., Kordon, F., Moldt, D., Eds.; Springer: Berlin/Heidelberg, Germany, 2022; LNCS 13220; pp. 1–23. [Google Scholar]
- Xia, C.; Wang, Z.; Wang, Z. The refinement of Petri net with inhibitor arcs based representation for embedded systems. Electronics 2022, 11, 1389. [Google Scholar] [CrossRef]
- Kaid, H.; Al-Ahmari, A.; Li, Z. Ameen. An improved synthesis method based on ILPP and colored Petri net for liveness enforcing controller of flexible manufacturing systems. IEEE Access 2022, 10, 68570–68581. [Google Scholar]
- Xia, C. Property preservation of refinement for Petri net based representation for embedded systems. Clust. Comput. 2016, 19, 1373–1384. [Google Scholar] [CrossRef]
- Wang, S.; You, D.; Zhou, M.; Seatsu, C. Characterization of admissible marking sets in Petri nets with uncontrollable transitions. IEEE Trans. Autom. Control. 2016, 61, 1953–1958. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).