
A Current Differential Protection Scheme for Distribution Networks with Inverter-Interfaced Distributed Generators Considering Delay Behaviors of Sequence Component Extractors


Abstract
:1. Introduction
1.1. Background and Motivation
1.2. State of the Art
1.3. Scope and Main Contributions
1.4. Structure of the Paper
2. Fault Transient Analysis of IIDGs Considering T/4 Delay Behaviors
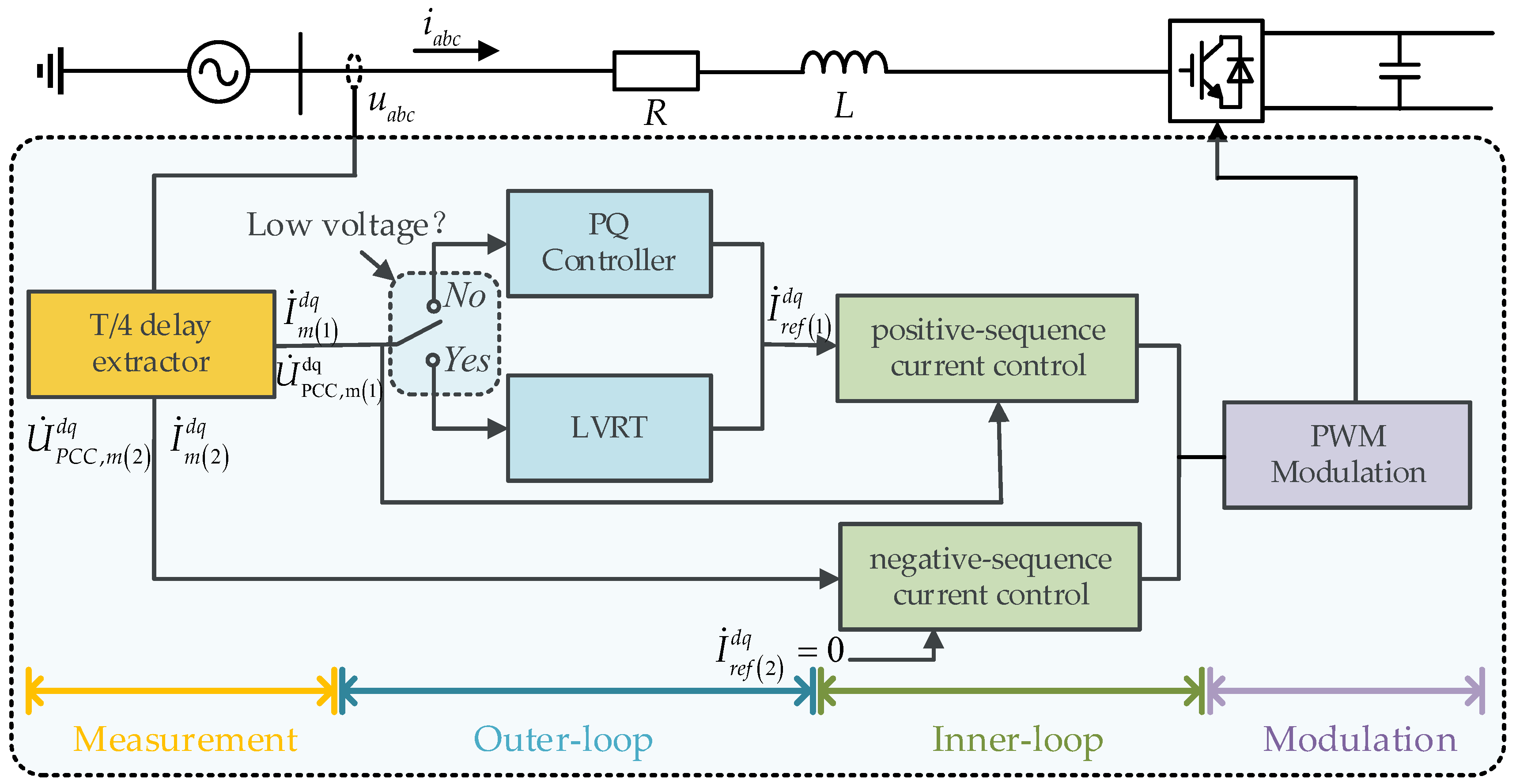
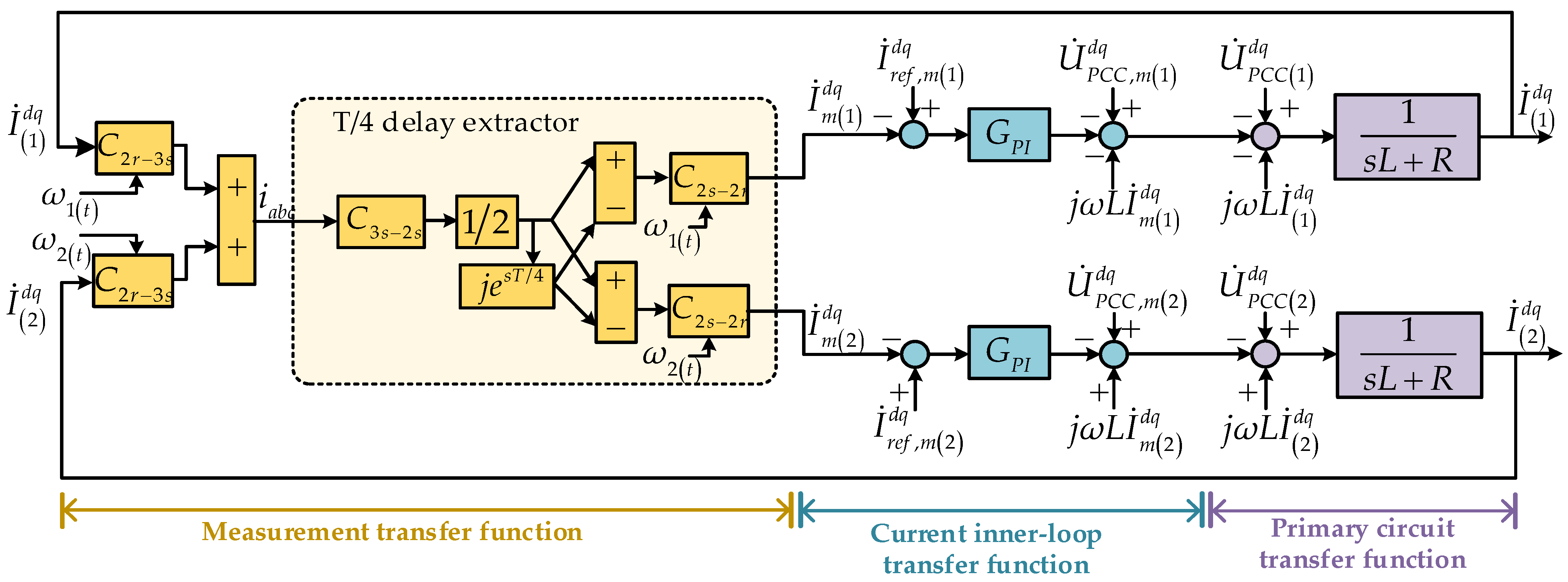
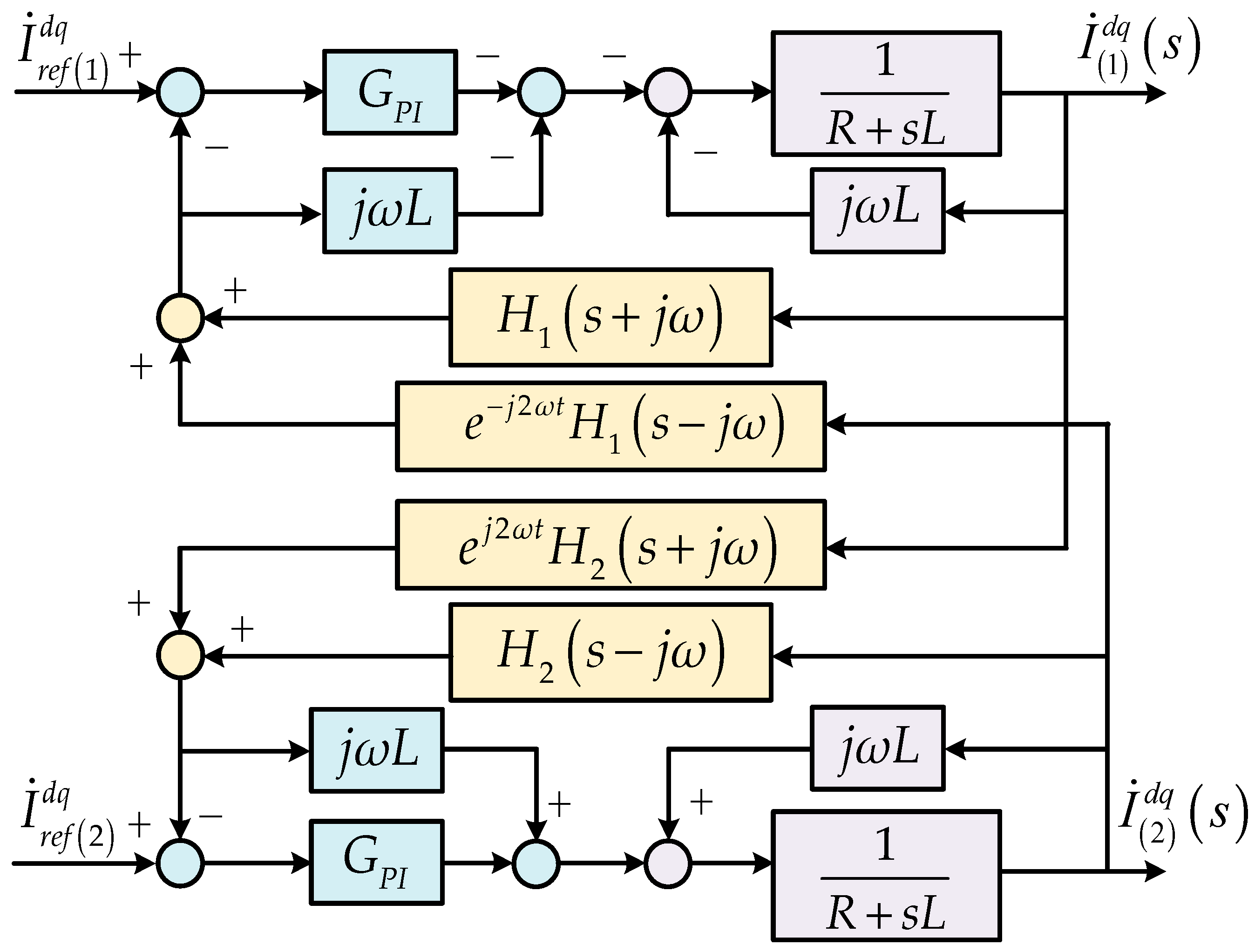
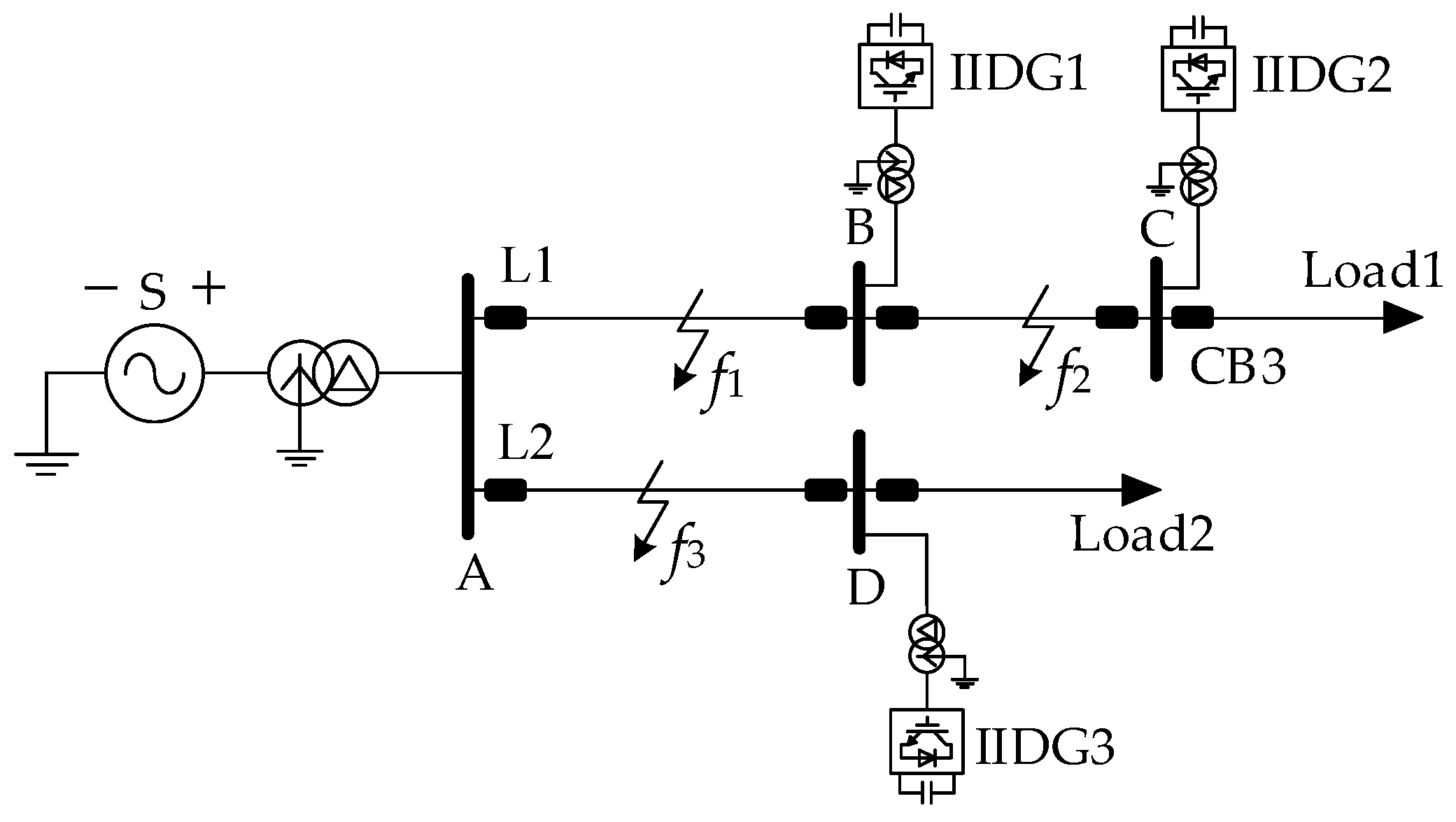
2.1. Fault Model
2.2. Fault Characteristics
3. Proposed Protection Scheme
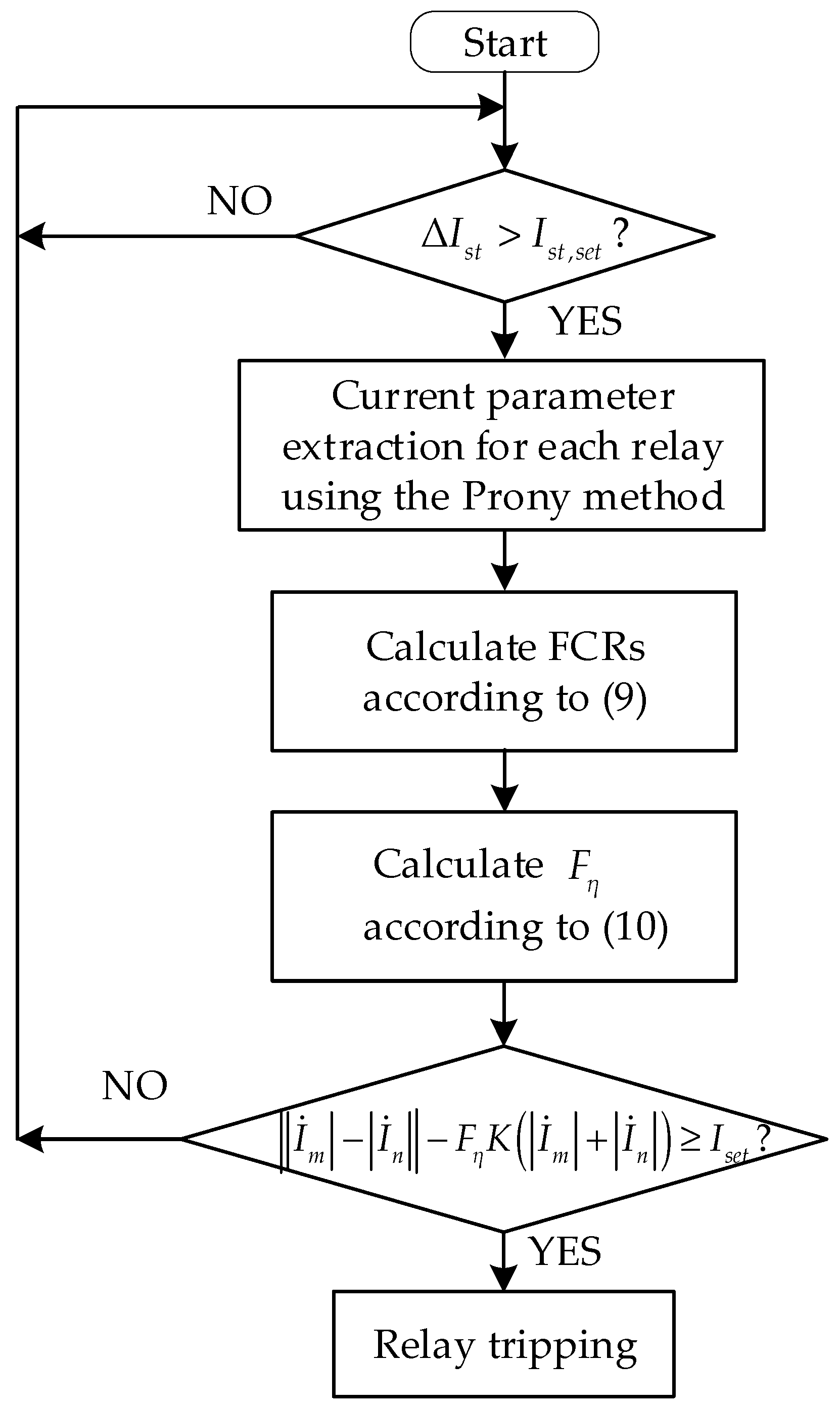
3.1. Protection Principle
3.2. Prony Method
- 1.
- According to (12), the sample function can be defined as:where is the conjugate of .
- 2.
- Construct the sample matrix :where is the order after the expansion, which is .
- 3.
- Using the singular value decomposition and least square estimation to determine the effective rank and all the parameters of the characteristic equation , substitute into (15) to solve :
- 4.
- Obtain the linear fit values in (16) based on the parameter .
- 5.
- Calculate the parameters using (17)
- 6.
- , , and can be yielded using the relationship between the parameters shown in (18).
| Algorithm 1: Pseudocode of the proposed CDP scheme |
| 1: Load current data from PSCAD (Im, In) 2: Obtain magnitude and phase information of currents by the Prony algorithm (result_A, result_B) 3: result_A= [Ax_m, fx_m, phix_m, betax_m] 4: result_B= [Ax_n, fx_n, phix_n, betax_n] 5: n=length(result_A) 6: F1_m=0 7: F2_m=0 8: for i=1: n−1 9: if (result_A(i,2)>=49 & result_A(i,2) <=51) 10: F1_m= F1_m+result_A(i,1) 11: end 12: if (result_A(i,2)>=20 && result_A(i,2) <=220 13: F2_m= F2_2+result_A(i,1); 14: end 15: end 16: =F1_m/F2_m; 17: F1_n=0 18: F2_n=0 19: for i=1: n−1 20: if (result_B(i,2)>=49 & result_B(i,2)<=51) 21: F1_n= F1_n+result_B(i,1); 22: end 23: if (result_A(i,2)>=20 && result_B(i,2)<=220 24: F2_n= F2_n+result_B(i,1); 25: end 26: end 27: =F1_n/F2_n 28: =min(,)/max(,) 29: if abs(abs(Im)-abs(In))-K**(abs(Im)+abs(In))>=I_set 30: disp(‘YES’) 31: end |
4. Case Study
4.1. Verification of Fault Transient Analysis Method
4.1.1. Fault Characteristics
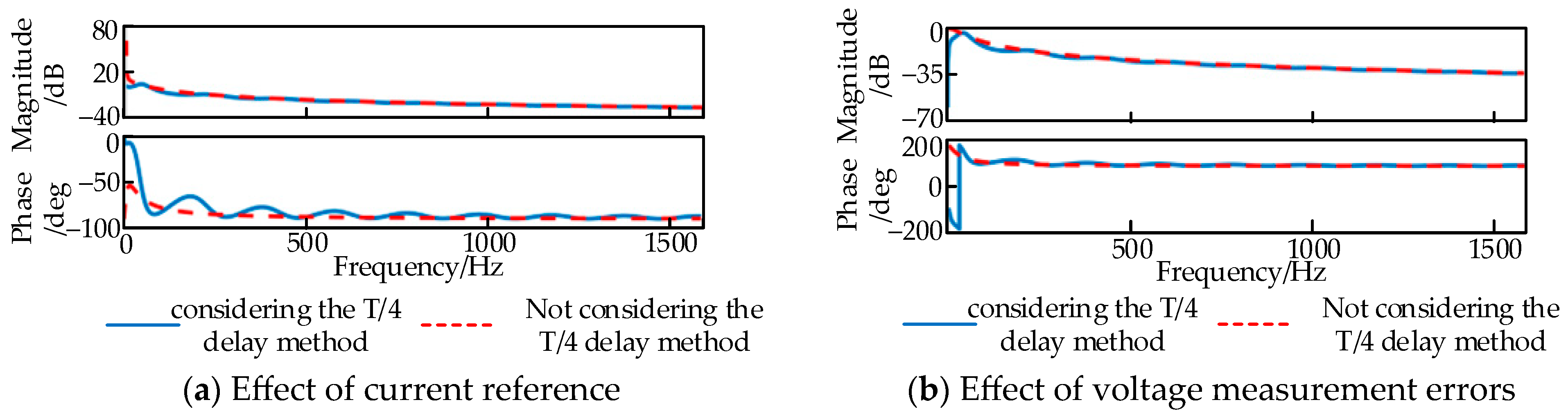
4.1.2. Comparison with Traditional Method
4.2. Different Locations and Fault Resistances
4.3. Different Fault Types
4.4. IIDG Output Power and Location
4.5. DNs without IIDGs
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Medhat, W.; Azzouz, M.A. Triple Current Control of Four-Wire Inverter-Interfaced DGs for Correct Fault Type Identification. IEEE Trans. Smart Grid 2022, 13, 3607–3618. [Google Scholar] [CrossRef]
- Gunawardane, K.; Bandara, N.; Subasinghage, K.; Kularatna, N. Extending the Input Voltage Range of Solar PV Inverters with Supercapacitor Energy Circulation. Electronics 2021, 10, 88. [Google Scholar] [CrossRef]
- Alatrash, H.; Mensah, A.; Mark, E.; Haddad, G.; Enslin, J. Generator Emulation Controls for Photovoltaic Inverters. IEEE Trans. Smart Grid 2012, 3, 996–1011. [Google Scholar] [CrossRef]
- Wang, Q.; Zhou, N.; Ye, L. Fault Analysis for Distribution Networks with Current-Controlled Three-Phase Inverter-Interfaced Distributed Generators. IEEE Trans. Power Deliv. 2015, 30, 1532–1542. [Google Scholar] [CrossRef]
- Wang, C.; Pang, K.; Shahidehpour, M.; Wen, F. MILP-Based Fault Diagnosis Model in Active Power Distribution Networks. IEEE Trans. Smart Grid 2021, 12, 3847–3857. [Google Scholar] [CrossRef]
- Mahamedi, B.; Eskandari, M.; Fletcher, J.E.; Zhu, J. Sequence-Based Control Strategy with Current Limiting for the Fault Ride-Through of Inverter-Interfaced Distributed Generators. IEEE Trans. Sustain. Energy 2020, 11, 165–174. [Google Scholar] [CrossRef]
- Haj-ahmed, M.A.; Illindala, M.S. The Influence of Inverter-Based DGs and Their Controllers on Distribution Network Protection. IEEE Trans. Ind. Appl. 2014, 50, 2928–2937. [Google Scholar] [CrossRef]
- Chen, L.-H. Overcurrent Protection for Distribution Feeders with Renewable Generation. Int. J. Electr. Power Energy Syst. 2017, 84, 202–213. [Google Scholar] [CrossRef]
- Andruszkiewicz, J.; Lorenc, J.; Staszak, B.; Weychan, A.; Zięba, B. Overcurrent Protection against Multi-Phase Faults in MV Networks Based on Negative and Zero Sequence Criteria. Int. J. Electr. Power Energy Syst. 2022, 134, 107449. [Google Scholar] [CrossRef]
- Rahmati, A.; Adhami, R. An Overcurrent Protection Relay Based on Local Measurements. In Proceedings of the 2013 IEEE Industry Applications Society Annual Meeting, Lake Buena Vista, FL, USA, 6–11 October 2013. [Google Scholar]
- Li, J.; Feng, J.; Bai, H.; Wang, H.; Li, W.; Huang, M.; Wang, G. An Adaptive Protection Scheme for Multiple Single-Phase Grounding Faults in Radial Distribution Networks with Inverter-Interfaced Distributed Generators. Int. J. Electr. Power Energy Syst. 2023, 152, 109221. [Google Scholar] [CrossRef]
- Qiang, J. Study on Adaptive Current Instantaneous Trip Protection Scheme for Distribution Network with Inverter Interfaced DG. Autom. Electr. Power Syst. 2009, 31, 71–76. [Google Scholar]
- Yousaf, M.; Muttaqi, K.M.; Sutanto, D. A Control Strategy to Mitigate the Sensitivity Deterioration of Overcurrent Protection in Distribution Networks with the Higher Concentration of the Synchronous and Inverter-Based DG Units. IEEE Trans. Ind. Applicat. 2021, 57, 2298–2306. [Google Scholar] [CrossRef]
- Zeng, D.; Wang, G.; Guo, J.; Sun, X. Adaptive Current Protection Scheme for Distribution Network with Inverter-Interfaced Distributed Generators. Autom. Electr. Power Syst. 2017, 41, 86–92. [Google Scholar]
- Salem, M.M.; Elkalashy, N.I.; Atia, Y.; Kawady, T.A. Modified Inverter Control of Distributed Generation for Enhanced Relaying Coordination in Distribution Networks. IEEE Trans. Power Deliv. 2017, 32, 78–87. [Google Scholar] [CrossRef]
- Zeineldin, H.H.; Sharaf, H.M.; Ibrahim, D.K.; El-Zahab, E.E.-D.A. Optimal Protection Coordination for Meshed Distribution Systems with DG Using Dual Setting Directional Over-Current Relays. IEEE Trans. Smart Grid 2015, 6, 115–123. [Google Scholar] [CrossRef]
- Saldarriaga-Zuluaga, S.D.; López-Lezama, J.M.; Muñoz-Galeano, N. An Approach for Optimal Coordination of Over-Current Relays in Microgrids with Distributed Generation. Electronics 2020, 9, 1740. [Google Scholar] [CrossRef]
- Ukil, A.; Deck, B.; Shah, V.H. Current-Only Directional Overcurrent Protection for Distribution Automation: Challenges and Solutions. IEEE Trans. Smart Grid 2012, 3, 1687–1694. [Google Scholar] [CrossRef]
- Jia, K.; Yang, Z.; Fang, Y.; Bi, T.; Sumner, M. Influence of Inverter-Interfaced Renewable Energy Generators on Directional Relay and an Improved Scheme. IEEE Trans. Power Electron. 2019, 34, 11843–11855. [Google Scholar] [CrossRef]
- Zidan, A.; El-Saadany, E.F. A Cooperative Multiagent Framework for Self-Healing Mechanisms in Distribution Systems. IEEE Trans. Smart Grid 2012, 3, 1525–1539. [Google Scholar] [CrossRef]
- Yinger, R.J. Self-Healing Circuits at Southern California Edison. In PES T&D 2012; IEEE: New York, NY, USA, 2012; pp. 1–3. [Google Scholar]
- Casagrande, E.; Woon, W.L.; Zeineldin, H.H.; Svetinovic, D. A Differential Sequence Component Protection Scheme for Microgrids with Inverter-Based Distributed Generators. IEEE Trans. Smart Grid 2014, 5, 29–37. [Google Scholar] [CrossRef]
- Gao, H.; Li, J.; Xu, B. Principle and Implementation of Current Differential Protection in Distribution Networks with High Penetration of DGs. IEEE Trans. Power Deliv. 2017, 32, 565–574. [Google Scholar] [CrossRef]
- Nikolaidis, V.C.; Michaloudis, G.; Tsimtsios, A.M.; Tzelepis, D.; Booth, C.D. A Coordinated Multi-Element Current Differential Protection Scheme for Active Distribution Systems. IEEE Trans. Power Deliv. 2022, 37, 4261–4271. [Google Scholar] [CrossRef]
- Zhou, C.; Zou, G.; Zang, L.; Du, X. Current Differential Protection for Active Distribution Networks Based on Improved Fault Data Self-Synchronization Method. IEEE Trans. Smart Grid 2022, 13, 166–178. [Google Scholar] [CrossRef]
- Zhou, C.; Zou, G.; Zhang, S.; Zheng, M.; Tian, J.; Du, T. Mathematical Morphology-Based Fault Data Self-Synchronization Method for Differential Protection in Distribution Networks. IEEE Trans. Smart Grid 2023, 14, 2607–2620. [Google Scholar] [CrossRef]
- Han, B.; Li, H.; Wang, G.; Zeng, D.; Liang, Y. A Virtual Multi-Terminal Current Differential Protection Scheme for Distribution Networks with Inverter-Interfaced Distributed Generators. IEEE Trans. Smart Grid 2018, 9, 5418–5431. [Google Scholar] [CrossRef]
- Chen, G.; Liu, Y.; Yang, Q. Impedance Differential Protection for Active Distribution Network. IEEE Trans. Power Deliv. 2020, 35, 25–36. [Google Scholar] [CrossRef]
- Hossain, M.; Leevongwat, I.; Rastgoufard, P. Revisions on Alpha Plane for Enhanced Sensitivity of Line Differential Protection. IEEE Trans. Power Deliv. 2018, 33, 3260–3262. [Google Scholar] [CrossRef]
- Nsengiyaremye, J.; Pal, B.C.; Begovic, M.M. Low-Cost Communication-Assisted Line Protection for Multi-Inverter Based Microgrids. IEEE Trans. Power Deliv. 2021, 36, 3371–3382. [Google Scholar] [CrossRef]
- Nsengiyaremye, J.; Pal, B.C.; Begovic, M.M. Microgrid Protection Using Low-Cost Communication Systems. IEEE Trans. Power Deliv. 2020, 35, 2011–2020. [Google Scholar] [CrossRef]
- Li, X.; Lu, Y. Improved Amplitude Differential Protection Scheme Based on the Frequency Spectrum Index for Distribution Networks with DFIG-Based Wind DGs. IEEE Access 2020, 8, 64225–64237. [Google Scholar] [CrossRef]
- Lin, X.; Ma, X.; Wang, Z.; Sui, Q.; Li, Z.; Ye, Y.; Wu, Y.; Cao, S.; Wang, G. A Novel Current Amplitude Differential Protection for Active Distribution Network Considering the Source-Effect of IM-Type Unmeasurable Load Branches. Int. J. Electr. Power Energy Syst. 2021, 129, 106780. [Google Scholar] [CrossRef]
- Chowdhury, A.; Paladhi, S.; Pradhan, A.K. Adaptive Unit Protection for Lines Connecting Large Solar Plants Using Incremental Current Ratio. IEEE Syst. J. 2022, 16, 3272–3283. [Google Scholar] [CrossRef]
- Zheng, X.; Chao, C.; Weng, Y.; Ye, H.; Liu, Z.; Gao, P.; Tai, N. High-Frequency Fault Analysis-Based Pilot Protection Scheme for a Distribution Network with High Photovoltaic Penetration. IEEE Trans. Smart Grid 2023, 14, 302–314. [Google Scholar] [CrossRef]
- Pathirana, A.; Rajapakse, A.; Perera, N. Development of a Hybrid Protection Scheme for Active Distribution Systems Using Polarities of Current Transients. Electr. Power Syst. Res. 2017, 152, 377–389. [Google Scholar] [CrossRef]
- Dong, J.; Pan, J.; Mao, X. Low Voltage Ride-through Strategy of VSG Based on Adaptive Positive and Negative Sequence Composite Control. Power Syst. Technol. 2023, 47, 815–822. [Google Scholar]
- Li, H.; Deng, C.; Zhang, Z.; Liang, Y.; Wang, G. An Adaptive Fault-Component-Based Current Differential Protection Scheme for Distribution Networks with Inverter-Based Distributed Generators. Int. J. Electr. Power Energy Syst. 2021, 128, 106719. [Google Scholar] [CrossRef]
- Li, J.; Bi, H.; Li, C.; Li, J.; Zeng, D.; Wang, G. Analysis and Calculation Method for Multiple Faults in Low-Resistance Grounded Systems with Inverter-Interfaced Distributed Generators Based on a PQ Control Strategy. Int. J. Electr. Power Energy Syst. 2022, 138, 107980. [Google Scholar] [CrossRef]
- Pan, G.; Zeng, D.; Wang, G.; Zhu, G.; Li, H. Fault Analysis on Distribution Network with Inverter Interfaced Distributed Generations Based on PQ Control Strategy. Proc. CSEE 2014, 34, 555–561. [Google Scholar]
- Yao, R.; Sun, K.; Qiu, F. Vectorized Efficient Computation of Padé Approximation for Semi-Analytical Simulation of Large-Scale Power Systems. IEEE Trans. Power Syst. 2019, 34, 3957–3959. [Google Scholar] [CrossRef]
- Soleimanisardoo, A.; Kazemi Karegar, H.; Zeineldin, H.H. Differential Frequency Protection Scheme Based on Off-Nominal Frequency Injections for Inverter-Based Islanded Microgrids. IEEE Trans. Smart Grid 2019, 10, 2107–2114. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| System equivalent impedance | 0.0001 + j0.628 (Ω) |
| Main transformer capacity | 50 (MVA) |
| Main transformer ratio | 110 kV/10.5 kV |
| Load capacity | 10 (MVA) |
| Load power factor | 0.9 |
| Line impedance | 0.06 + j0.089 (Ω/km) |
| Length of line AB | 3 (km) |
| Length of line BC | 4 (km) |
| Length of line AD | 5 (km) |
| IIDG1, IIDG2 and IIDG3 capacity | 3, 1.5 and 4 (MVA) |
| Fault time | 0.2 (s) |
| Method | Current | 5 ms | 10 ms | 20 ms |
|---|---|---|---|---|
| Proposed Method | d-axis | <0.01% | <0.01% | <0.01% |
| q-axis | <0.01% | <0.01% | <0.01% | |
| Method in [39] | d-axis | 1.74% | 1.64% | 1.36% |
| q-axis | 2.03% | 1.93% | 1.56% |
| Method | Current | 5 ms | 10 ms | 20 ms |
|---|---|---|---|---|
| Proposed Method | d-axis | 0.02% | 0.03% | 0.05% |
| q-axis | 0.03% | 0.06% | 0.05% | |
| Method in [39] | d-axis | 71.61% | 49.38% | 33.22% |
| q-axis | 3.99% | 15.31% | 7.86% |
| Fault Point | Fault Location | Fault Resistance (Ω) | (kA) | Relay AB Tripped or Not | Relay | |||
|---|---|---|---|---|---|---|---|---|
| 10% | 10 | 1 | 0.8457 | 0.8398 | 10.5620 | YES | AB | |
| 100 | 0.9990 | 0.8171 | 0.8180 | 10.6497 | YES | AB | ||
| 500 | 0.9991 | 0.8185 | 0.8192 | 10.6496 | YES | AB | ||
| 50% | 10 | 0.9979 | 0.9081 | 0.9385 | 7.9419 | YES | AB | |
| 100 | 0.9981 | 0.9216 | 0.9233 | 7.9289 | YES | AB | ||
| 500 | 0.9977 | 0.9316 | 0.9338 | 7.9563 | YES | AB | ||
| 90% | 10 | 0.9980 | 0.8625 | 0.8643 | 6.4316 | YES | AB | |
| 100 | 0.9979 | 0.8723 | 0.8741 | 6.1900 | YES | AB | ||
| 500 | 0.9973 | 0.8758 | 0.8181 | 6.5142 | YES | AB | ||
| 10% | 10 | 0.9977 | 0.9975 | 0.9999 | 7.5339 | NO | BC | |
| 100 | 0.9978 | 0.9972 | 0.9993 | 7.3486 | NO | BC | ||
| 500 | 0.9966 | 0.9963 | 0.9999 | 7.5341 | NO | BC | ||
| 50% | 10 | 0.9863 | 0.9862 | 0.9999 | 5.9441 | NO | BC | |
| 100 | 0.9866 | 0.9863 | 0.9997 | 5.0407 | NO | BC | ||
| 500 | 0.9863 | 0.9864 | 0.9999 | 5.9212 | NO | BC | ||
| 90% | 10 | 0.9869 | 0.9866 | 0.9999 | 4.7786 | NO | BC | |
| 100 | 0.9858 | 0.9857 | 0.9999 | 5.4212 | NO | BC | ||
| 500 | 0.9870 | 0.9869 | 0.9999 | 5.2130 | NO | BC | ||
| 10% | 10 | 0.8853 | 0.8867 | 0.9984 | 9.9337 | NO | AD | |
| 100 | 0.8879 | 0.8864 | 0.9983 | 10.2895 | NO | AD | ||
| 500 | 0.8871 | 0.8857 | 0.9984 | 9.9200 | NO | AD | ||
| 50% | 10 | 0.8742 | 0.8753 | 0.9987 | 6.6909 | NO | AD | |
| 100 | 0.8065 | 0.8015 | 0.9938 | 6.7521 | NO | AD | ||
| 500 | 0.7953 | 0.7989 | 0.9955 | 6.6799 | NO | AD | ||
| 90% | 10 | 0.9111 | 0.9139 | 0.9969 | 4.9530 | NO | AD | |
| 100 | 0.8848 | 0.8863 | 0.9984 | 4.9544 | NO | AD | ||
| 500 | 0.8081 | 0.7962 | 0.9853 | 4.9296 | NO | AD |
| Fault Type | Fault Resistance (Ω) | (kA) | Trip or Not | |||
|---|---|---|---|---|---|---|
| three-phase short-circuit fault | — | 0.9961 | 0.0001 | 0.0001 | 8.6650 | YES |
| two-phase short-circuit fault | — | 0.9984 | 0.9647 | 0.9662 | 8.3815 | YES |
| two-phase to ground fault | 1 | 0.9978 | 0.9131 | 0.9151 | 7.8778 | YES |
| 5 | 0.9981 | 0.8846 | 0.8863 | 8.0605 | YES | |
| 50 | 0.9979 | 0.8814 | 0.8832 | 8.0672 | YES | |
| 100 | 0.9979 | 0.9102 | 0.9121 | 8.0038 | YES |
| IIDG Output Power (MVA) | IIDG Location (km) | (kA) | Trip or Not | |||
|---|---|---|---|---|---|---|
| 1 | 0.5 | 0.9977 | 0.9431 | 0.9453 | 8.3592 | YES |
| 1.5 | 0.9976 | 0.9491 | 0.9515 | 8.3423 | YES | |
| 2.5 | 0.9976 | 0.9378 | 0.9401 | 8.3371 | YES | |
| 2 | 0.5 | 0.9976 | 0.9301 | 0.9323 | 8.3432 | YES |
| 1.5 | 0.9977 | 0.9377 | 0.9399 | 8.3379 | YES | |
| 2.5 | 0.9977 | 0.9269 | 0.9290 | 8.4387 | YES | |
| 3 | 0.5 | 0.9975 | 0.9208 | 0.92311 | 8.2625 | YES |
| 1.5 | 0.9979 | 0.9141 | 0.9160 | 8.3865 | YES | |
| 2.5 | 0.9980 | 0.9163 | 0.9181 | 8.3367 | YES | |
| 4.5 | 0.5 | 0.9976 | 0.9026 | 0.9048 | 8.2436 | YES |
| 1.5 | 0.9974 | 0.9038 | 0.9061 | 8.2242 | YES | |
| 2.5 | 0.9979 | 0.9011 | 0.9030 | 8.3819 | YES |
| Fault Point | Fault Location | Fault Resistance (Ω) | (kA) | Relay AB Tripped or Not | Relay | |||
|---|---|---|---|---|---|---|---|---|
| 10% | 10 | 0.9893 | 0.9998 | 0.9895 | 10.3600 | YES | AB | |
| 100 | 0.9998 | 0.9999 | 0.9999 | 10.7699 | YES | AB | ||
| 500 | 0.9899 | 0.9971 | 0.9928 | 10.3574 | YES | AB | ||
| 50% | 10 | 1.0000 | 1.0000 | 1.0000 | 8.1853 | YES | AB | |
| 100 | 0.9993 | 0.9990 | 0.9997 | 8.4347 | YES | AB | ||
| 500 | 0.9995 | 0.9996 | 0.9999 | 8.2247 | YES | AB | ||
| 90% | 10 | 0.9996 | 0.9975 | 0.9979 | 6.4943 | YES | AB | |
| 100 | 0.9991 | 0.9994 | 0.9997 | 6.4898 | YES | AB | ||
| 500 | 0.9986 | 0.9982 | 0.9996 | 6.5035 | YES | AB | ||
| 10% | 10 | 1.0000 | 1.0000 | 1.0000 | 6.8398 | NO | BC | |
| 100 | 0.9978 | 0.9978 | 1.0000 | 6.8314 | NO | BC | ||
| 500 | 0.9963 | 0.9962 | 0.9999 | 6.8742 | NO | BC | ||
| 50% | 10 | 1.0000 | 1.0000 | 1.0000 | 4.6295 | NO | BC | |
| 100 | 0.9888 | 0.9901 | 0.9987 | 4.6328 | NO | BC | ||
| 500 | 0.9984 | 0.9985 | 0.9999 | 5.4846 | NO | BC | ||
| 90% | 10 | 0.9952 | 0.9989 | 0.9964 | 4.8398 | NO | BC | |
| 100 | 0.9968 | 0.9986 | 0.9982 | 4.6977 | NO | BC | ||
| 500 | 0.9954 | 0.9958 | 0.9996 | 5.5084 | NO | BC | ||
| 10% | 10 | 1.0000 | 1.0000 | 1.0000 | 10.1800 | NO | AD | |
| 100 | 0.9998 | 0.9998 | 1.0000 | 10.1804 | NO | AD | ||
| 500 | 0.9997 | 0.9998 | 0.9999 | 10.1761 | NO | AD | ||
| 50% | 10 | 1.0000 | 1.0000 | 1.0000 | 6.8431 | NO | AD | |
| 100 | 0.9996 | 0.9992 | 0.9996 | 6.8430 | NO | AD | ||
| 500 | 1.0000 | 0.9998 | 0.9998 | 6.8427 | NO | AD | ||
| 90% | 10 | 1.0000 | 1.0000 | 1.0000 | 5.0166 | NO | AD | |
| 100 | 0.9982 | 0.9987 | 0.9995 | 5.0142 | NO | AD | ||
| 500 | 0.9999 | 0.9999 | 1.0000 | 5.0158 | NO | AD |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, G.; Huang, M.; Bai, H.; Li, J.; Yao, R.; Wang, H.; Li, C. A Current Differential Protection Scheme for Distribution Networks with Inverter-Interfaced Distributed Generators Considering Delay Behaviors of Sequence Component Extractors. Electronics 2023, 12, 4727. https://doi.org/10.3390/electronics12234727
Wang G, Huang M, Bai H, Li J, Yao R, Wang H, Li C. A Current Differential Protection Scheme for Distribution Networks with Inverter-Interfaced Distributed Generators Considering Delay Behaviors of Sequence Component Extractors. Electronics. 2023; 12(23):4727. https://doi.org/10.3390/electronics12234727
Chicago/Turabian StyleWang, Gang, Min Huang, Hao Bai, Jie Li, Ruotian Yao, Haoming Wang, and Chengxin Li. 2023. "A Current Differential Protection Scheme for Distribution Networks with Inverter-Interfaced Distributed Generators Considering Delay Behaviors of Sequence Component Extractors" Electronics 12, no. 23: 4727. https://doi.org/10.3390/electronics12234727