
Stability Analysis and Control Strategy Optimization of a Paralleled IPOS Phase-Shifted Full-Bridge Converters System Based on Droop Control

Abstract
:1. Introduction
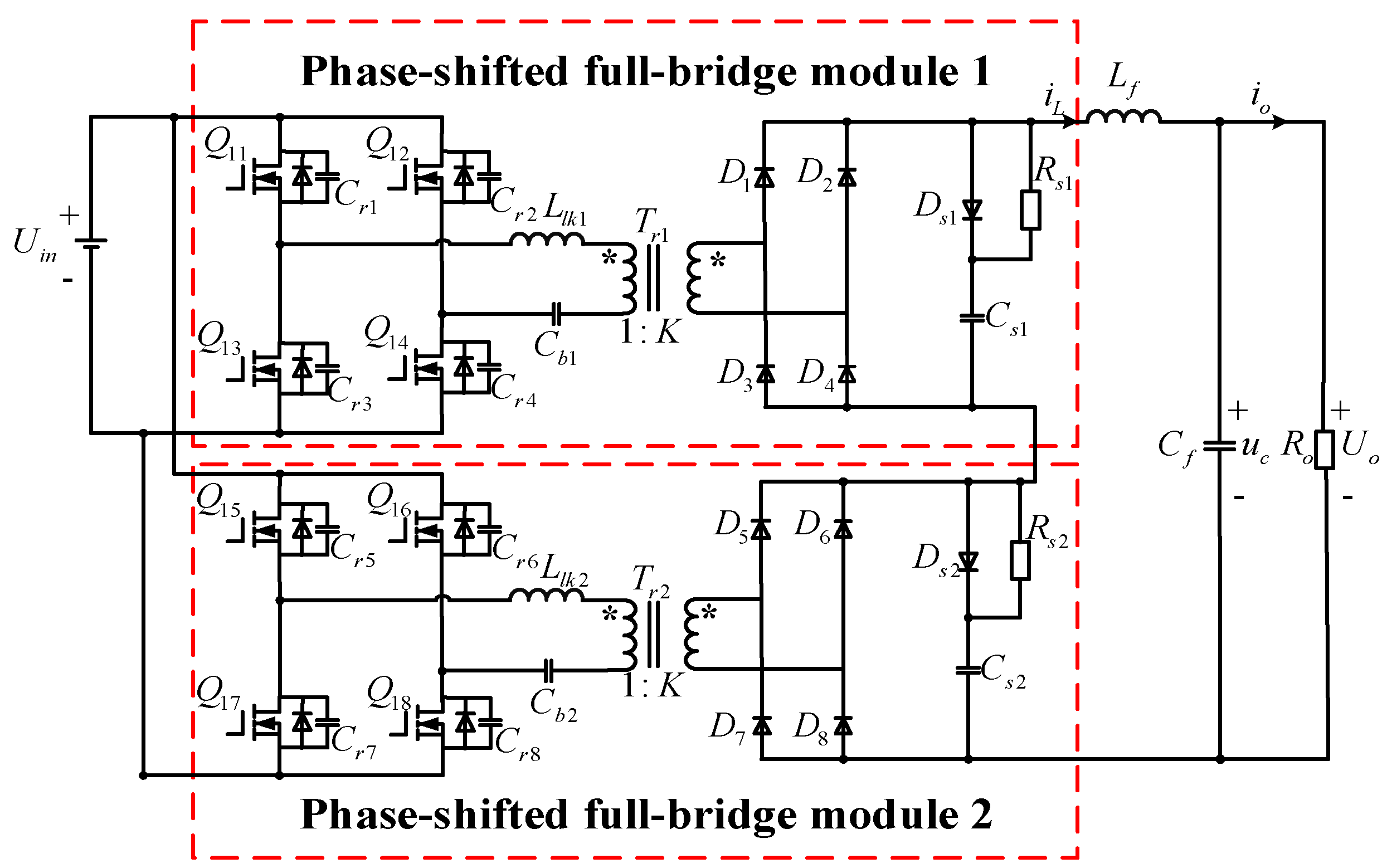
2. Mathematical Model of the Paralleled IPOS Phase-Shifted Full-Bridge Converter System
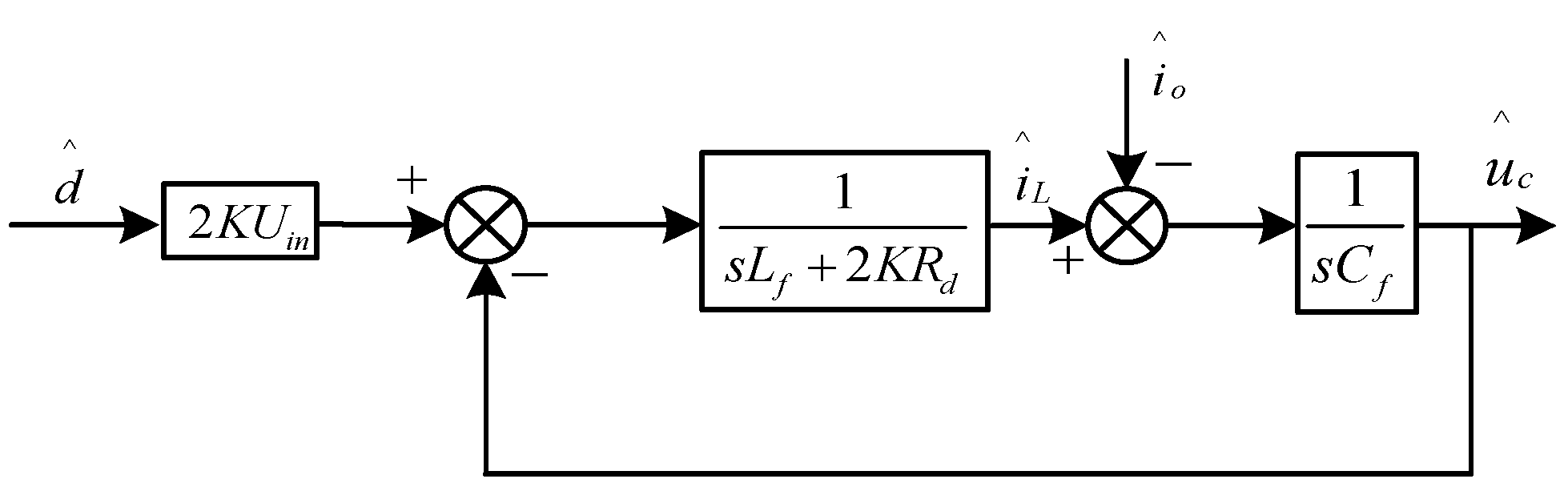
2.1. Modeling of Single-Module IPOS Phase-Shifted Full-Bridge System
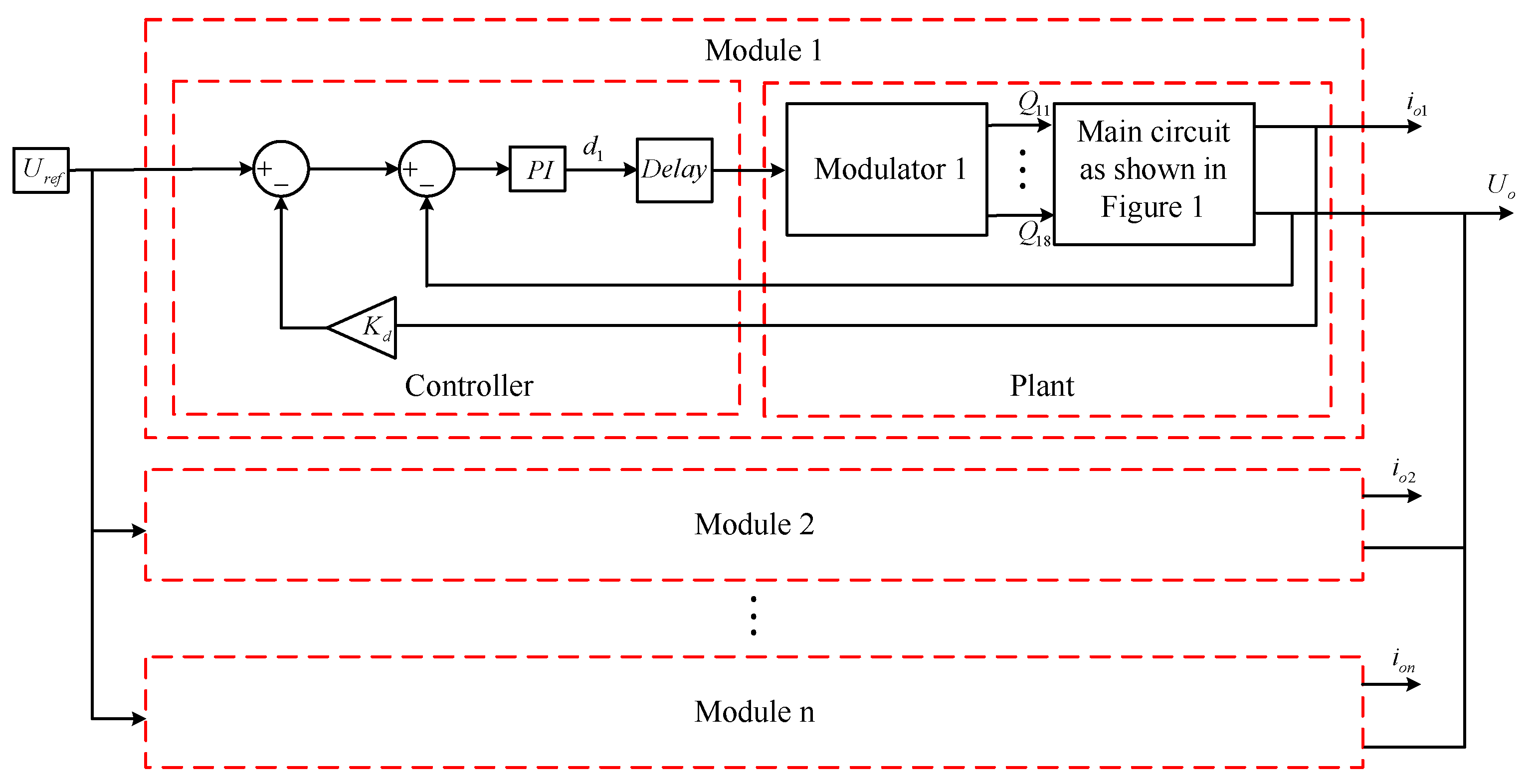
2.2. Modeling of N-Module Paralleled IPOS Phase-Shifted Full-Bridge Converters System
3. Stability Analysis of the Paralleled IPOS Phase-Shifted Full-Bridge Converters System
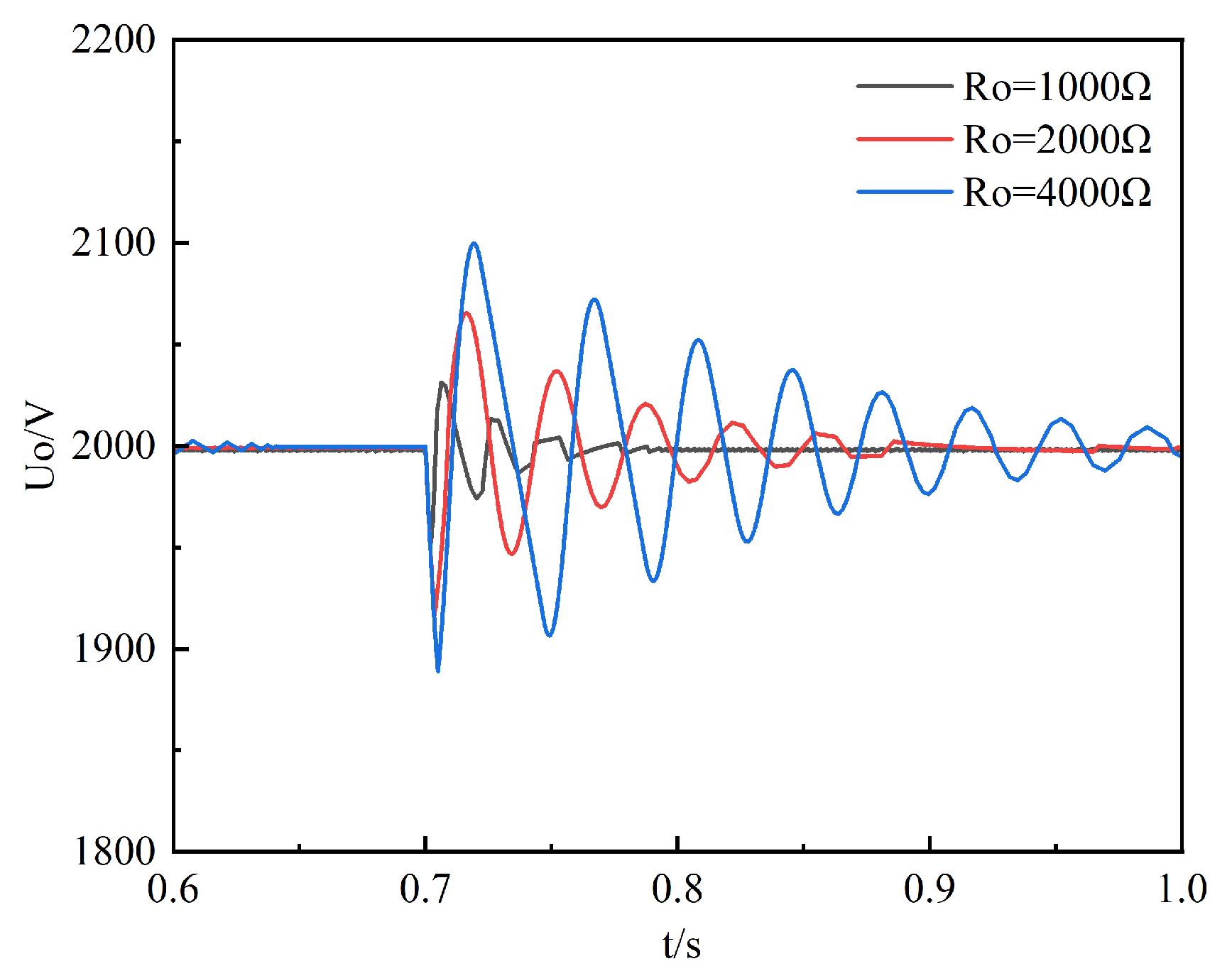
3.1. The Influence of Load Change on System Stability
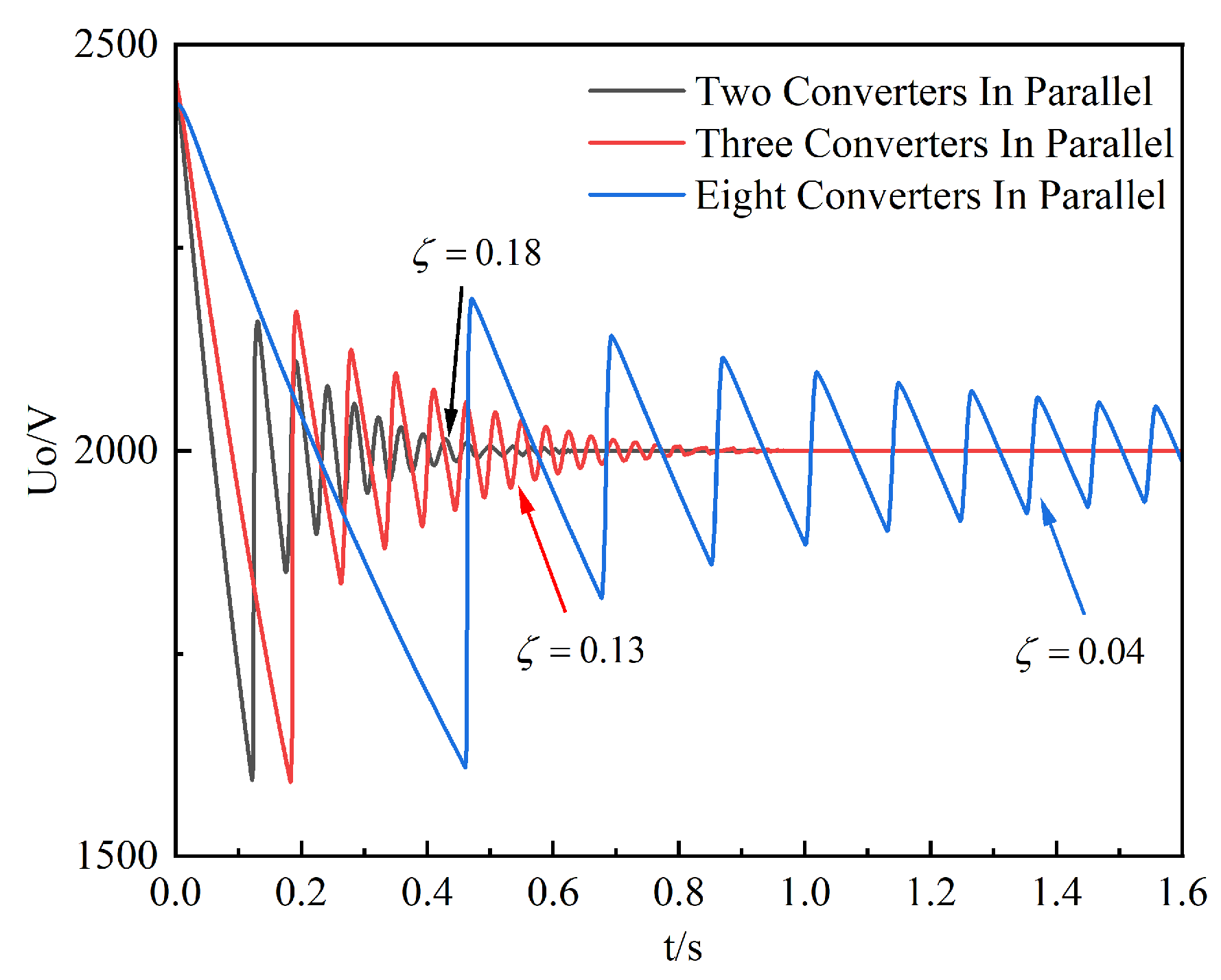
3.2. The Influence of the Number of Paralleled IPOS Phase-Shifted Full-Bridge Converters on Stability
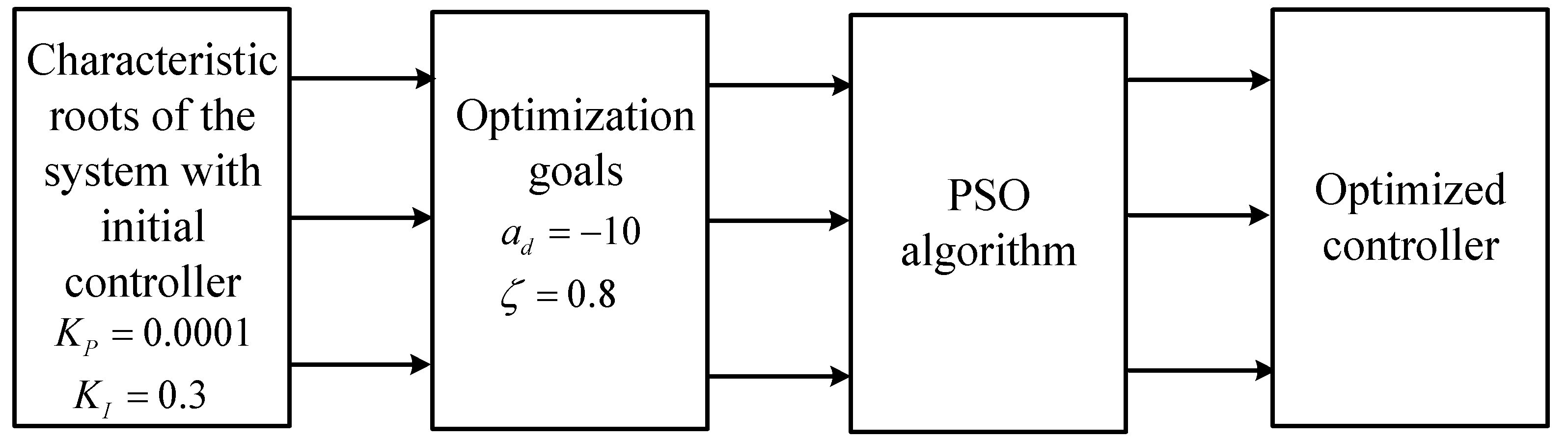
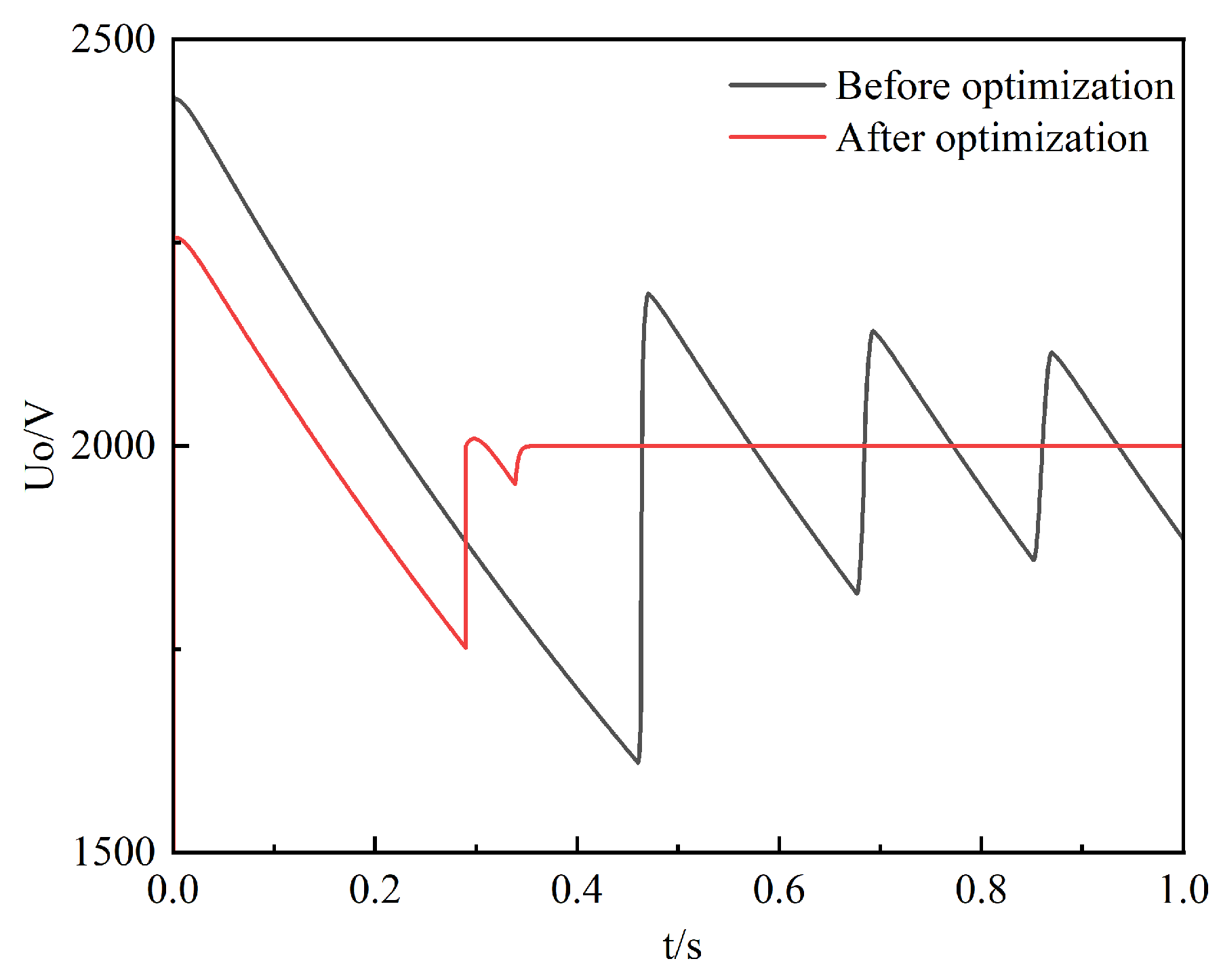
4. Control Strategy Optimization of the Paralleled IPOS Phase-Shifted Full-Bridge Converters System Based on the PSO Algorithm
4.1. Establish the Objective Function
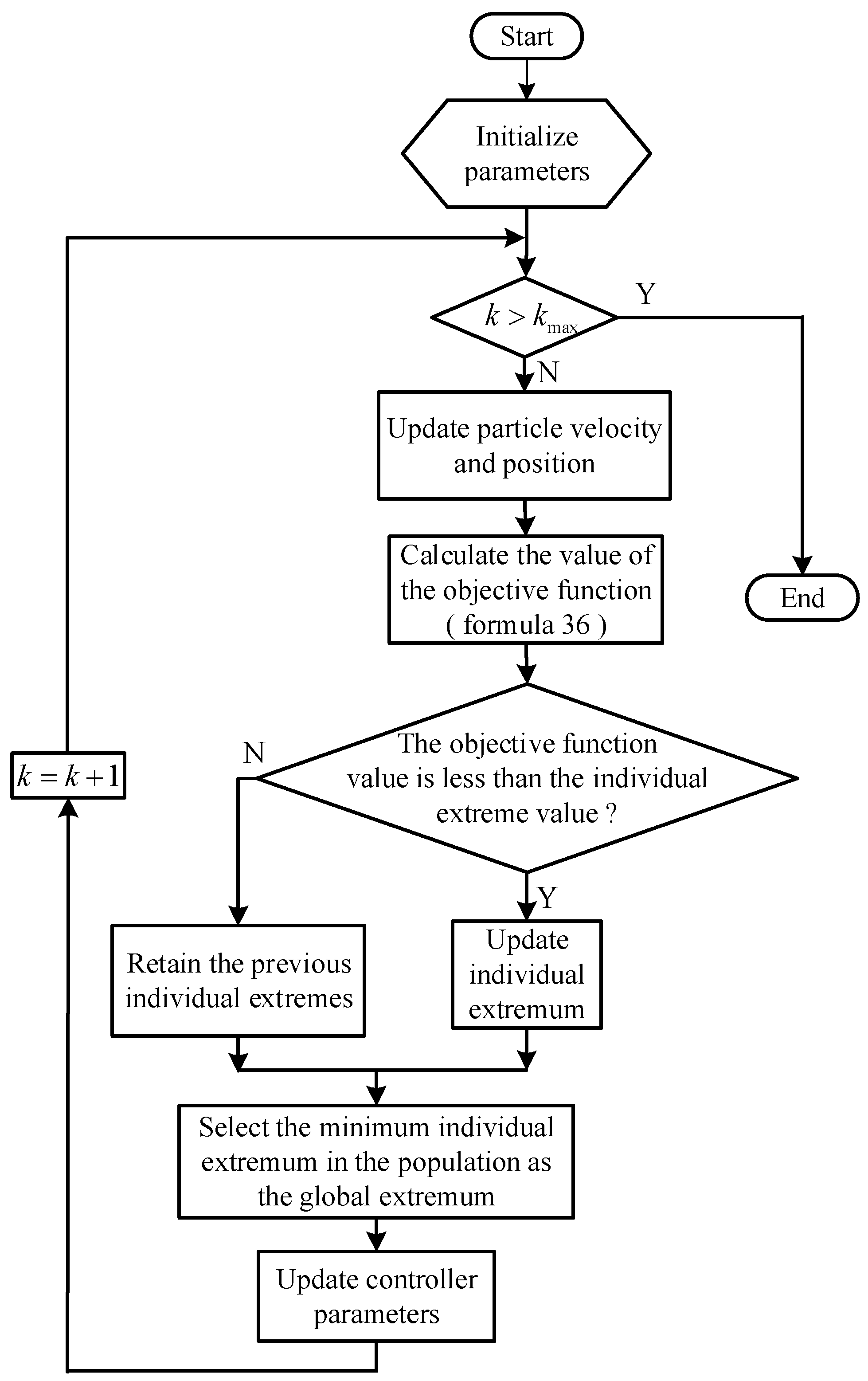
4.2. Optimize Control Parameters
5. Simulation Verification
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Shi, Y.; Xi, J.; Wang, X.; Gui, X.; Yang, X. Large-Power ZVZCS Full-Bridge Three-Level DC–DC Converter with Wide Operation Range and Its Application in Sapphire Crystal Furnace Power Supply. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 8, 4191–4208. [Google Scholar] [CrossRef]
- Talapko, D. Telecom Datacenter Power Infrastructure Availability Comparison of DC and AC UPS; Intelec: Scottsdale, AZ, USA, 2012; pp. 1–5. [Google Scholar] [CrossRef]
- Kim, H.-S.; Seong, H.-W.; Cho, J.-H. Start-Up Control to Prevent Overcurrent During Hot Swap in Paralleled DC–DC Converters. IEEE Trans. Ind. Electron. 2013, 60, 5558–5574. [Google Scholar] [CrossRef]
- Mao, H.; Yao, L.; Wang, C.; Batarseh, I. Analysis of Inductor Current Sharing in Nonisolated and Isolated Multiphase dc–dc Converters. IEEE Trans. Ind. Electron. 2007, 54, 3379–3388. [Google Scholar] [CrossRef]
- Jiang, C.; Du, H.; Wen, G. Current sharing control for parallel DC-DC buck converters based on consensus theory. In Proceedings of the 2017 13th IEEE International Conference on Control & Automation (ICCA), Ohrid, North Macedonia, 3–6 July 2017; pp. 536–540. [Google Scholar] [CrossRef]
- Shuai, Z.; He, D.; Fang, J.; Shen, Z.J.; Tu, C.; Wang, J. Robust droop control of DC distribution networks. IET Renew. Power Gener. 2016, 10, 807–814. [Google Scholar] [CrossRef]
- Zhang, T.; Wei, T.; Yin, J. An improved droop control strategy for the DVR parallel system. In Proceedings of the 2017 12th IEEE Conference on Industrial Electronics and Applications (ICIEA), Siem Reap, Cambodia, 18–20 June 2017; pp. 1132–1136. [Google Scholar] [CrossRef]
- Lin, L.; Ma, H.; Bai, Z. An Improved Proportional Load-Sharing Strategy for Meshed Parallel Inverters System with Complex Impedances. IEEE Trans. Power Electron. 2017, 32, 7338–7351. [Google Scholar] [CrossRef]
- Chen, Z.; Pei, X.; Yang, M.; Peng, L. An Adaptive Virtual Resistor (AVR) Control Strategy for Low-Voltage Parallel Inverters. IEEE Trans. Power Electron. 2019, 34, 863–876. [Google Scholar] [CrossRef]
- Iu, H.H.C.; Tse, C.K. Bifurcation behavior in parallel-connected buck converters. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 2001, 48, 233–240. [Google Scholar] [CrossRef]
- Song, L.; Liu, P.; Duan, S.; Liu, X. A Stability Analysis Method for Input-Series Output-Parallel DC-DC Converter System. In Proceedings of the 2020 IEEE 9th International Power Electronics and Motion Control Conference (IPEMC2020-ECCE Asia), Nanjing, China, 29 November–2 December 2020; pp. 2652–2657. [Google Scholar] [CrossRef]
- Li, H.; Ren, F.; Liu, C.; Guo, Z.; Lü, J.; Zhang, B.; Zheng, T. An Extended Stability Analysis Method for Paralleled DC-DC Converters System with Considering the Periodic Disturbance Based on Floquet Theory. IEEE Access 2020, 8, 9023–9036. [Google Scholar] [CrossRef]
- Ma, Y.; Corzine, K.; Maqsood, A.; Gao, F.; Wang, K. Stability Assessment of Droop Controlled Parallel Buck Converters in Zonal Ship DC Microgrid. In Proceedings of the 2019 IEEE Electric Ship Technologies Symposium (ESTS), Washington, DC, USA, 14–16 August 2019; pp. 268–272. [Google Scholar] [CrossRef]
- Xiao, Z.; Cao, J.; Zhu, H.; Pan, L.; Xue, H.; Zheng, G.; Jia, J. Parallel Power Sharing Control of Multi-Controllable Rectifiers in a High-Power DC Fast Charging Station. World Electr. Veh. J. 2023, 14, 193. [Google Scholar] [CrossRef]
- Peng, D.; Huang, M.; Li, J.; Sun, J.; Zha, X.; Wang, C. Large-Signal Stability Criterion for Parallel-Connected DC–DC Converters with Current Source Equivalence. IEEE Trans. Circuits Syst. II Express Briefs 2019, 66, 2037–2041. [Google Scholar] [CrossRef]
- Russo, A.; Cavallo, A. Supercapacitor stability and control for More Electric Aircraft application. In Proceedings of the 2020 European Control Conference (ECC), St. Petersburg, Russia, 12–15 May 2020; pp. 1909–1914. [Google Scholar] [CrossRef]
- Russo, A.; Cavallo, A. Stability and Control for Buck–Boost Converter for Aeronautic Power Management. Energies 2023, 16, 988. [Google Scholar] [CrossRef]
- Xu, W.; Ismail, M.M.; Liu, Y.; Islam, M.R. Parameter Optimization of Adaptive Flux-Weakening Strategy for Permanent-Magnet Synchronous Motor Drives Based on Particle Swarm Algorithm. IEEE Trans. Power Electron. 2019, 34, 12128–12140. [Google Scholar] [CrossRef]
- Xu, Z.; Li, S.; Su, J. Genetic and simulated annealing algorithm based coordinated optimization of parameters of supplementary excitation damping controller with parameters of sub-synchronous oscillation damping controller. Power Syst. Technol. 2021, 39, 1983–1988. [Google Scholar] [CrossRef]
- Vlatkovic, V.; Sabate, J.A.; Ridley, R.B.; Lee, F.C.; Cho, B.H. Small-signal analysis of the phase-shifted PWM converter. IEEE Trans. Power Electron. 1992, 7, 128–135. [Google Scholar] [CrossRef]
- Sabate, J.A.; Vlatkovic, V.; Ridley, R.B.; Lee, F.C.; Cho, B.H. Design considerations for high-voltage high-power full-bridge zero-voltage-switched PWM converter. In Proceedings of the Fifth Annual Proceedings on Applied Power Electronics Conference and Exposition, Los Angeles, CA, USA, 11–16 March 1990; pp. 275–284. [Google Scholar] [CrossRef]
- Lin, X.; Ye, Z. Comparison of time delay processing methods in control system. In Proceedings of the 2015 4th International Conference on Computer Science and Network Technology, Harbin, China, 19–20 December 2015; pp. 1502–1505. [Google Scholar] [CrossRef]
- Cole, S.; Beerten, J.; Belmans, R. Generalized Dynamic VSC MTDC Model for Power System Stability Studies. IEEE Trans. Power Syst. 2010, 25, 1655–1662. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Name | Sign | Value |
|---|---|---|
| Input voltage | 240 V | |
| Output voltage | 2000 V | |
| Ratio of transformer | 1:6 | |
| Switching frequency | 15 kHz | |
| Sampling period | 66.67 μs | |
| Transformer leakage inductance | 0.3 μH | |
| Switching tube parasitic capacitance | 3 nF | |
| Output filtering inductance | 274 μH | |
| Output filter capacitor | 35 μF | |
| Rated power | 100 kW | |
| Droop coefficient | 2 | |
| Proportional coefficient | 0.0001 | |
| Integral coefficient | 0.3 |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| 2 | 100 | ||
| 20 | 1 | ||
| 2 | 2 | ||
| −10 | 0.8 | ||
| Controller Parameter | Initial Parameters | Optimized Parameters |
|---|---|---|
| Proportional coefficient | 0.0001 | 0.038 |
| Integral coefficient | 0.03 | 9.71 |
| Dominant Characteristic Root | Pre-Optimization Value | Optimized Value | Damping Ratio before and after Optimization |
|---|---|---|---|
| / |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qin, Z.; Cai, H.; Lin, X. Stability Analysis and Control Strategy Optimization of a Paralleled IPOS Phase-Shifted Full-Bridge Converters System Based on Droop Control. Electronics 2023, 12, 3685. https://doi.org/10.3390/electronics12173685
Qin Z, Cai H, Lin X. Stability Analysis and Control Strategy Optimization of a Paralleled IPOS Phase-Shifted Full-Bridge Converters System Based on Droop Control. Electronics. 2023; 12(17):3685. https://doi.org/10.3390/electronics12173685
Chicago/Turabian StyleQin, Zhenghao, Huafeng Cai, and Xinchun Lin. 2023. "Stability Analysis and Control Strategy Optimization of a Paralleled IPOS Phase-Shifted Full-Bridge Converters System Based on Droop Control" Electronics 12, no. 17: 3685. https://doi.org/10.3390/electronics12173685