
Remote Control of a Mobile Robot for Indoor Patrol

Abstract
:
1. Introduction
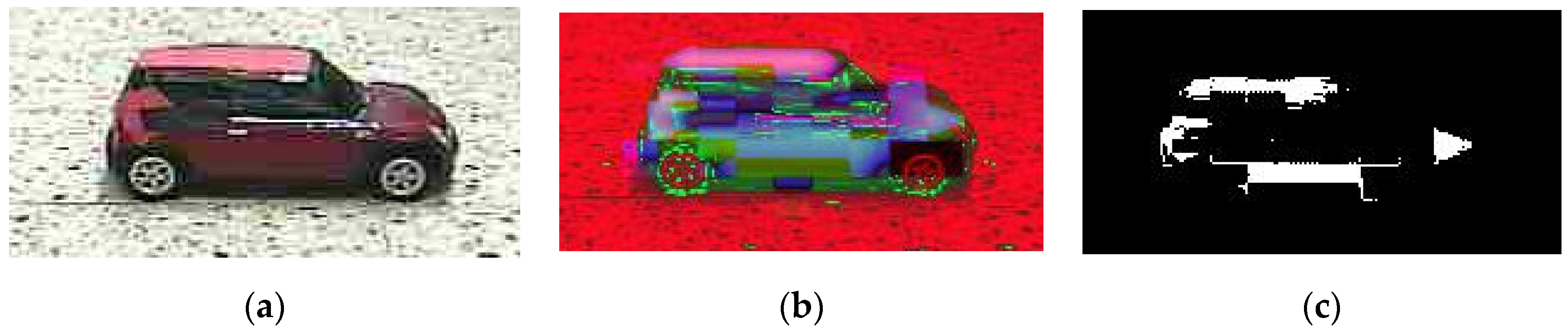
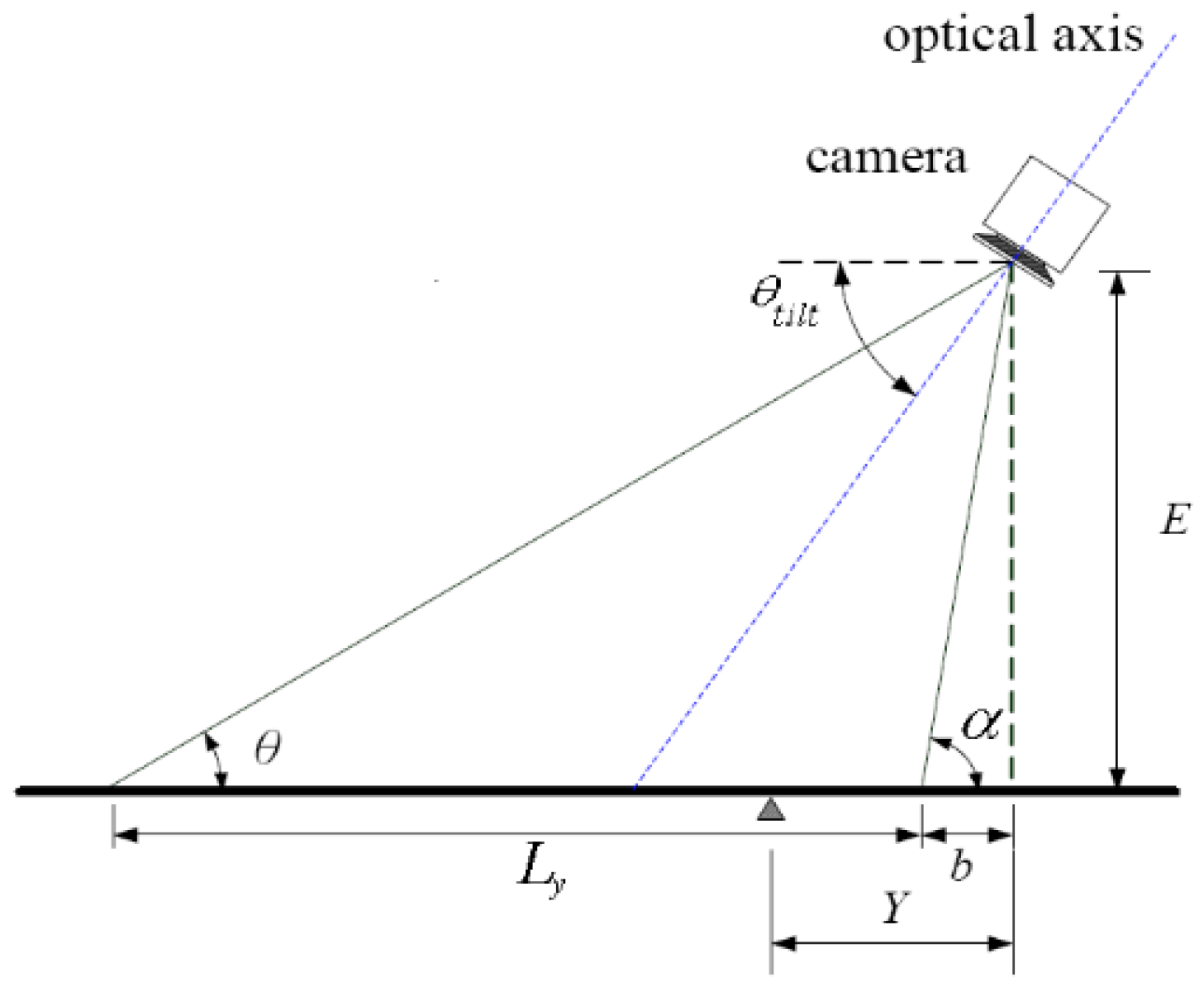
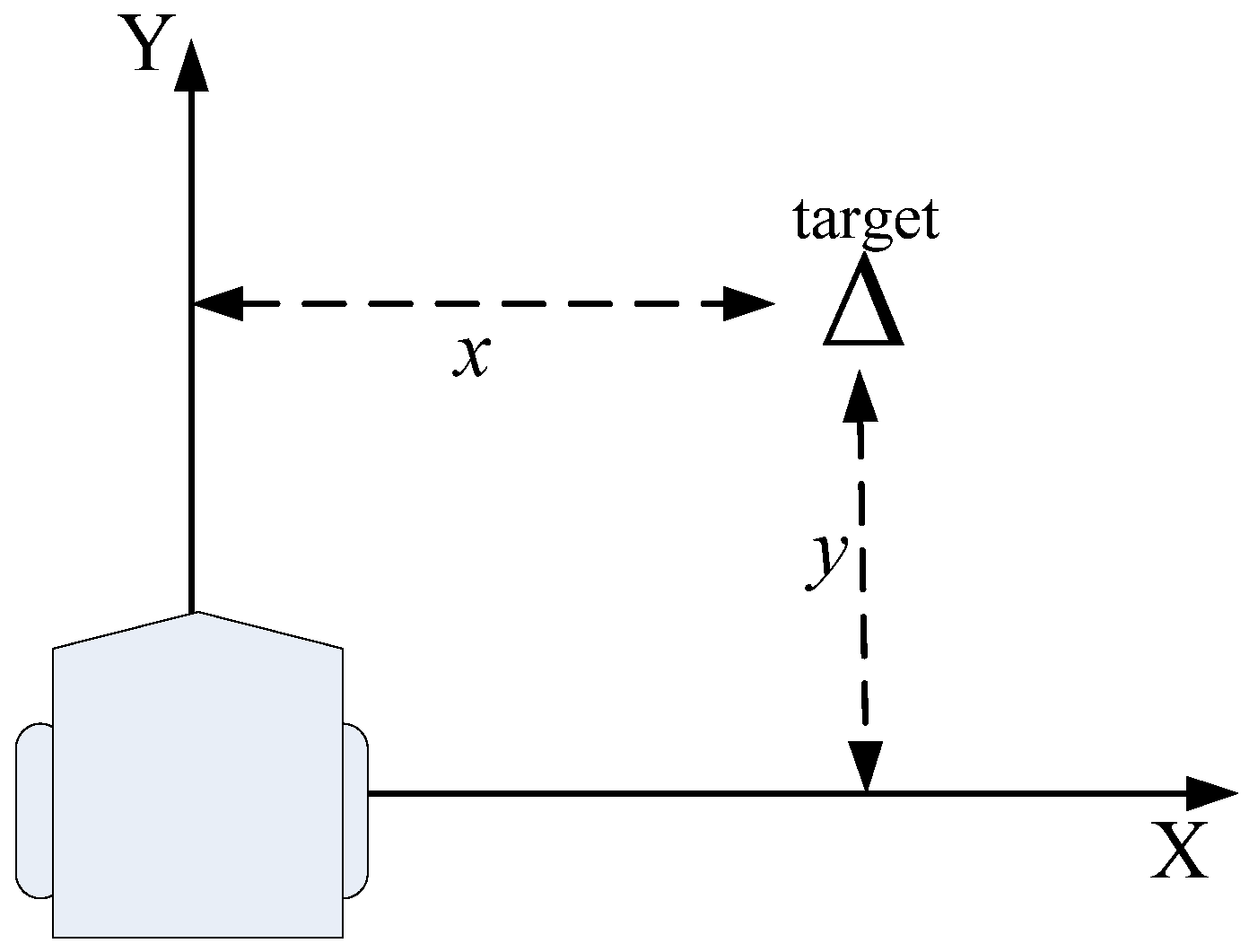
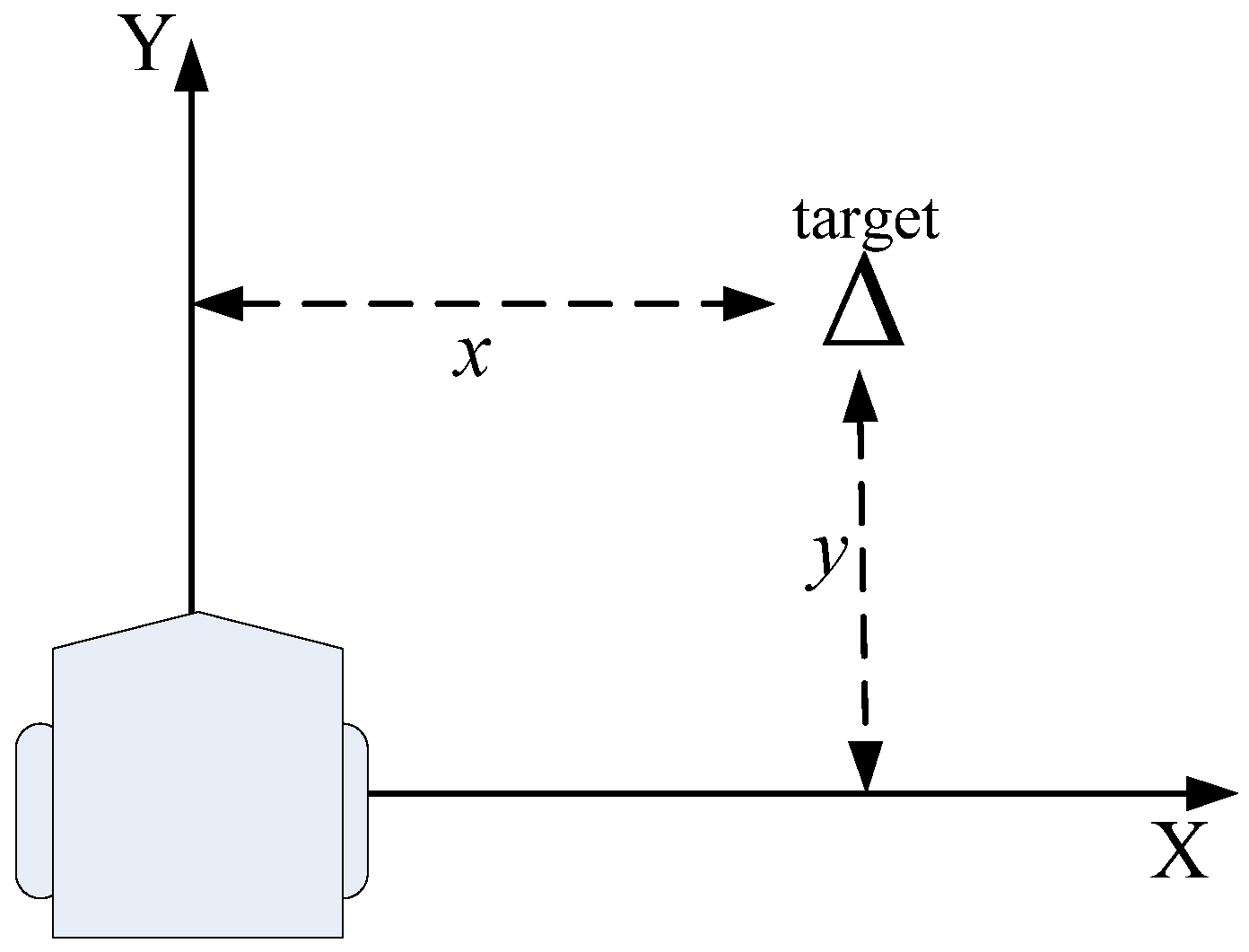
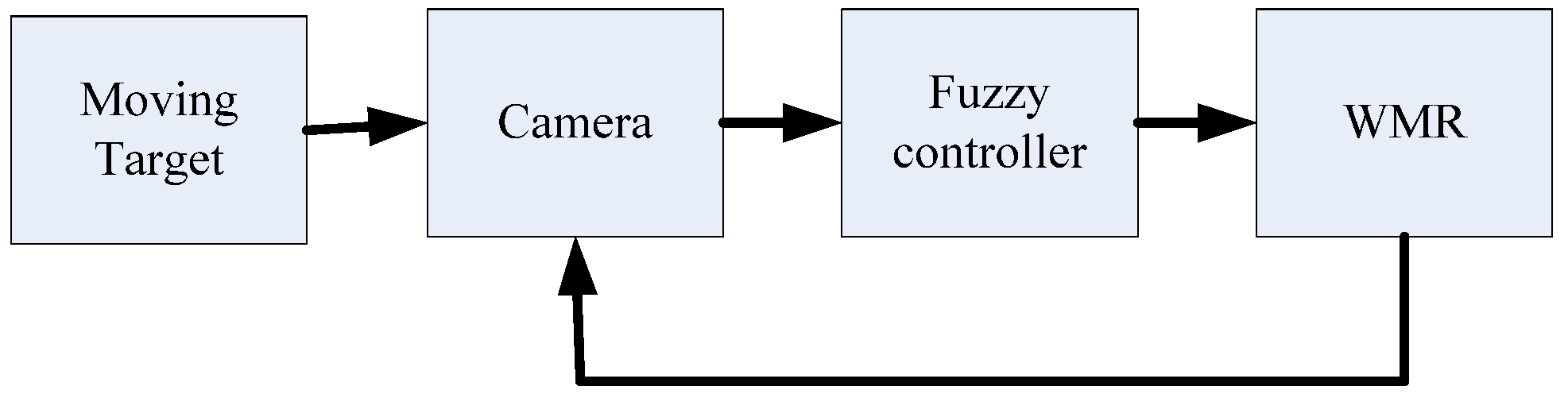
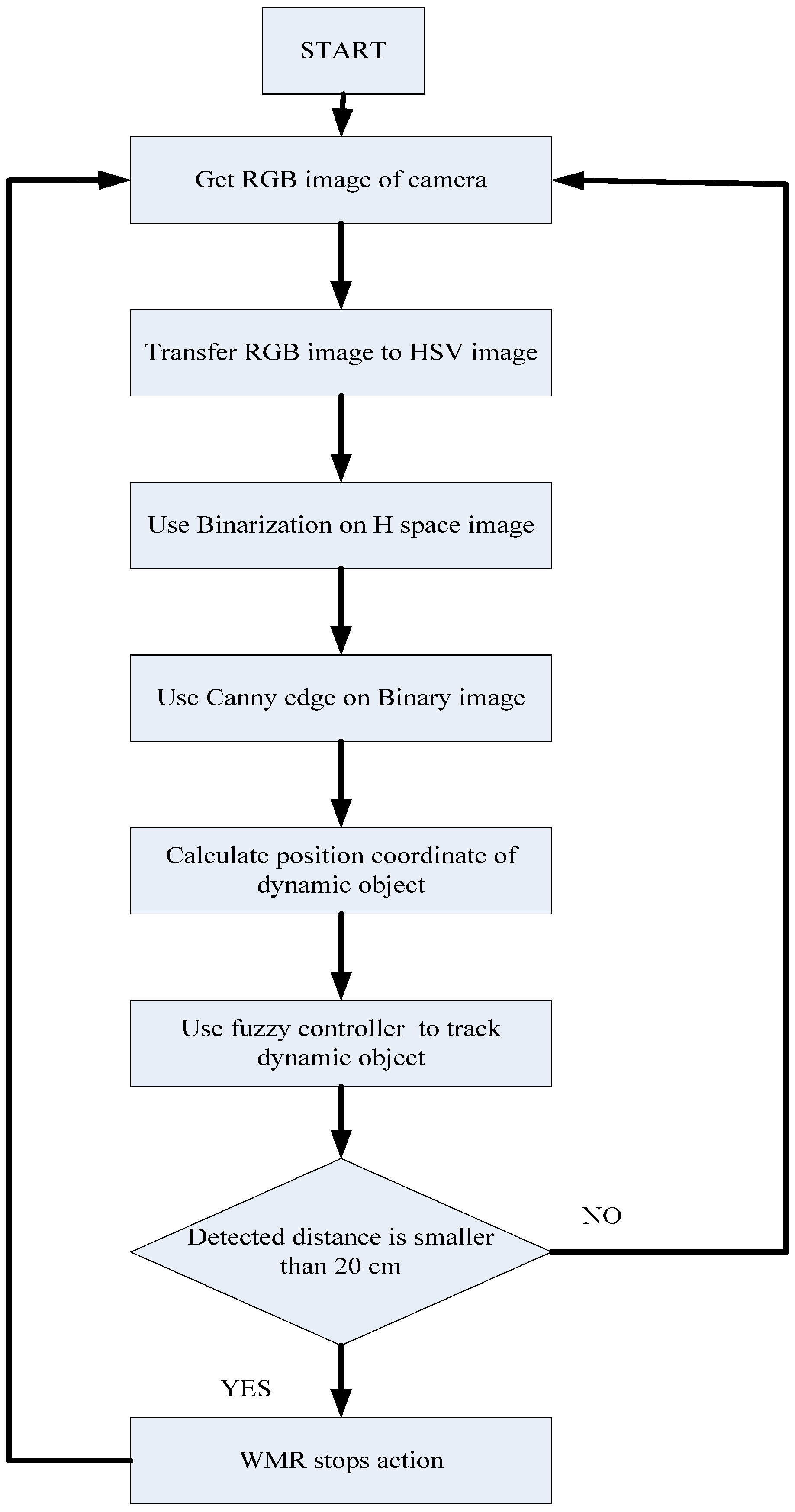
2. Image Processing
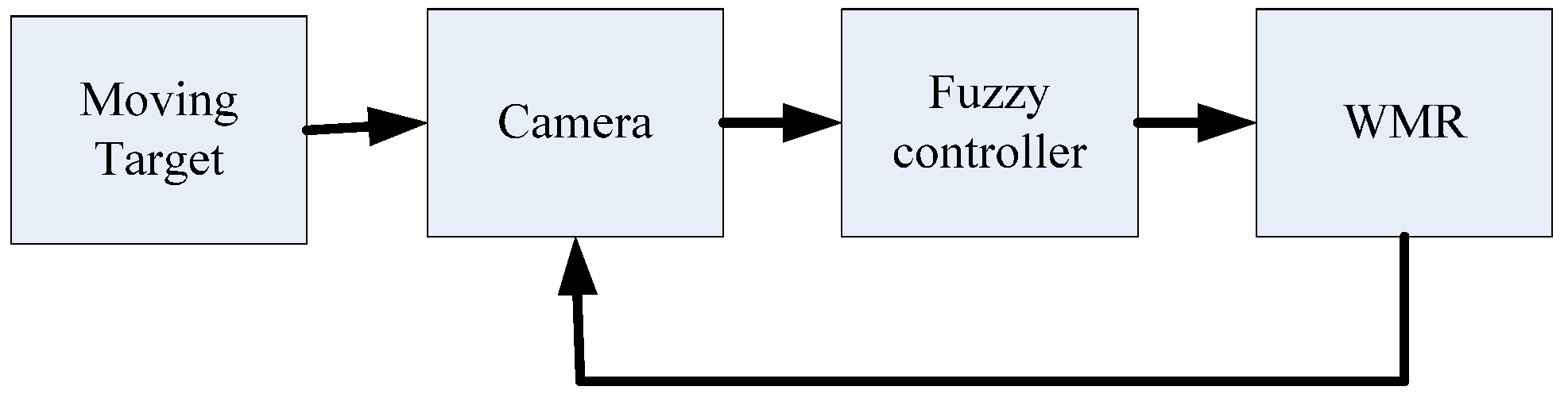
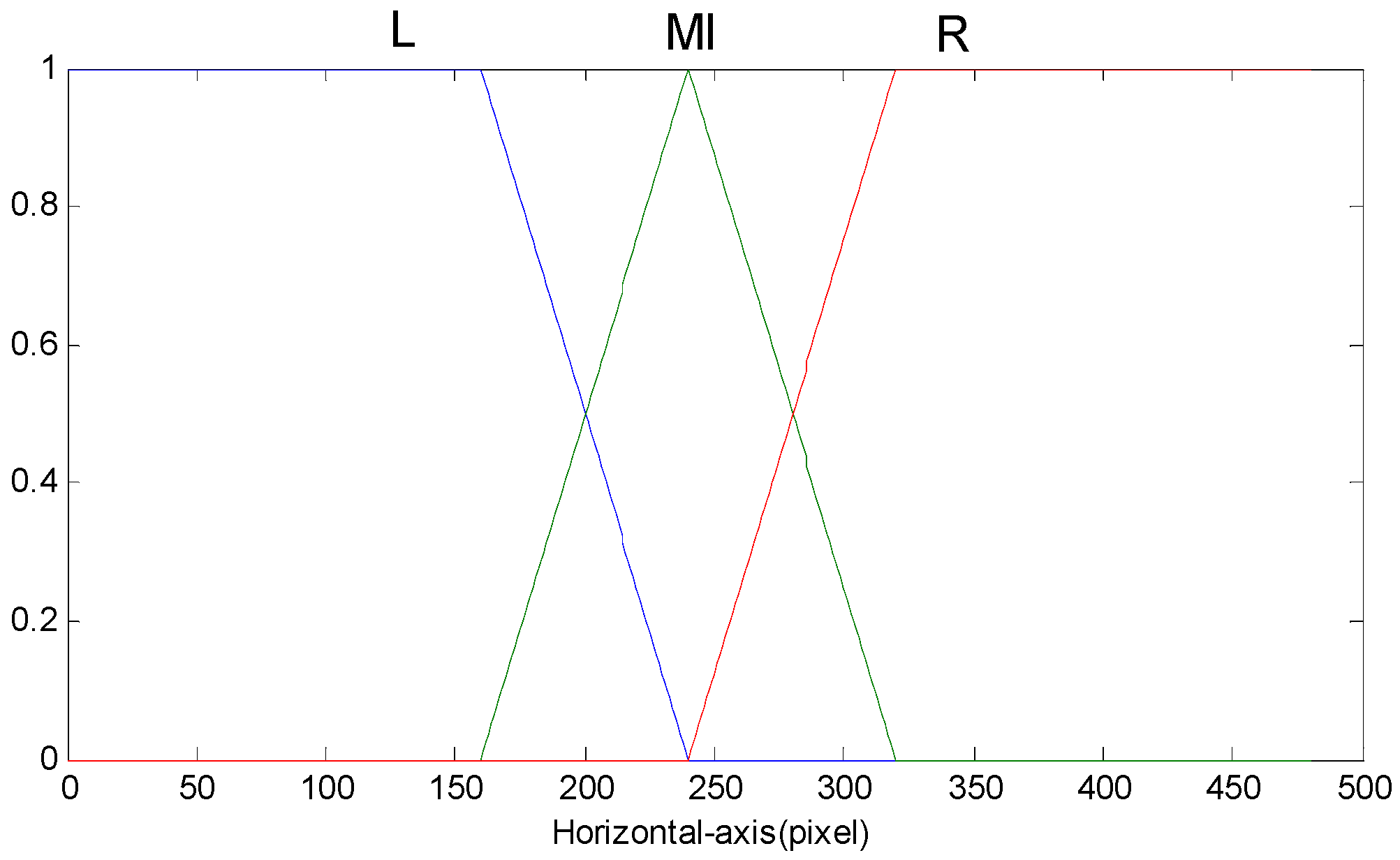
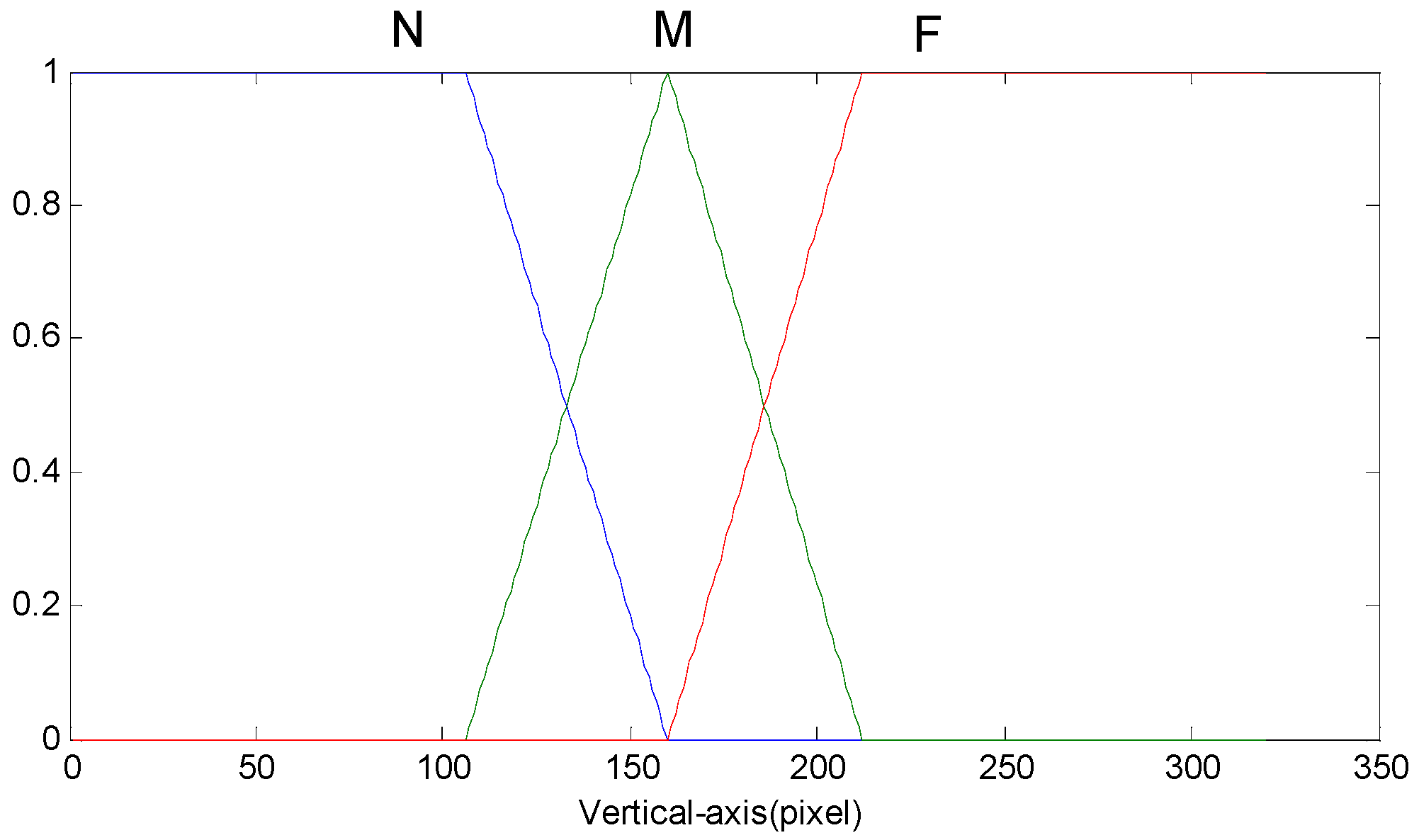
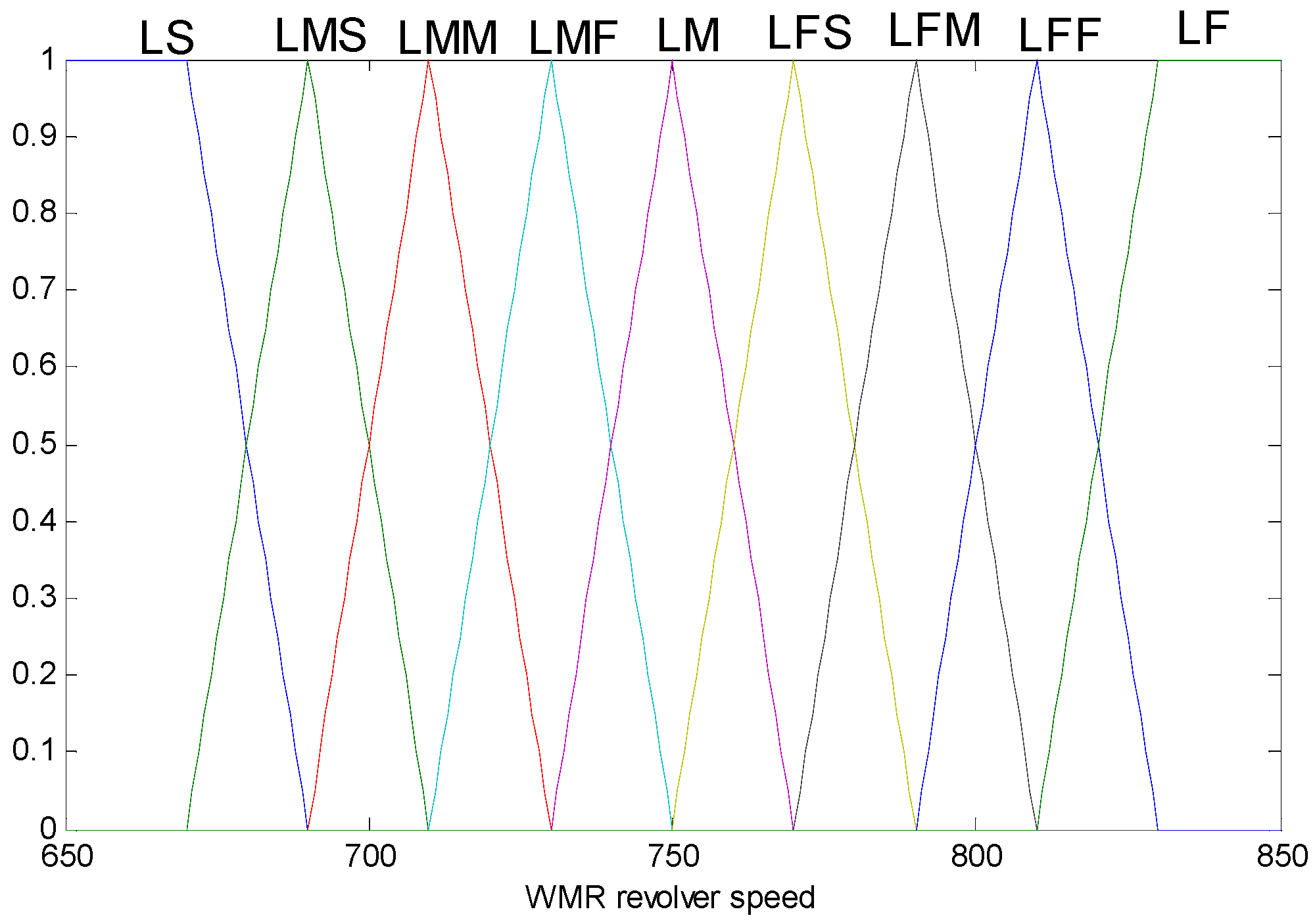
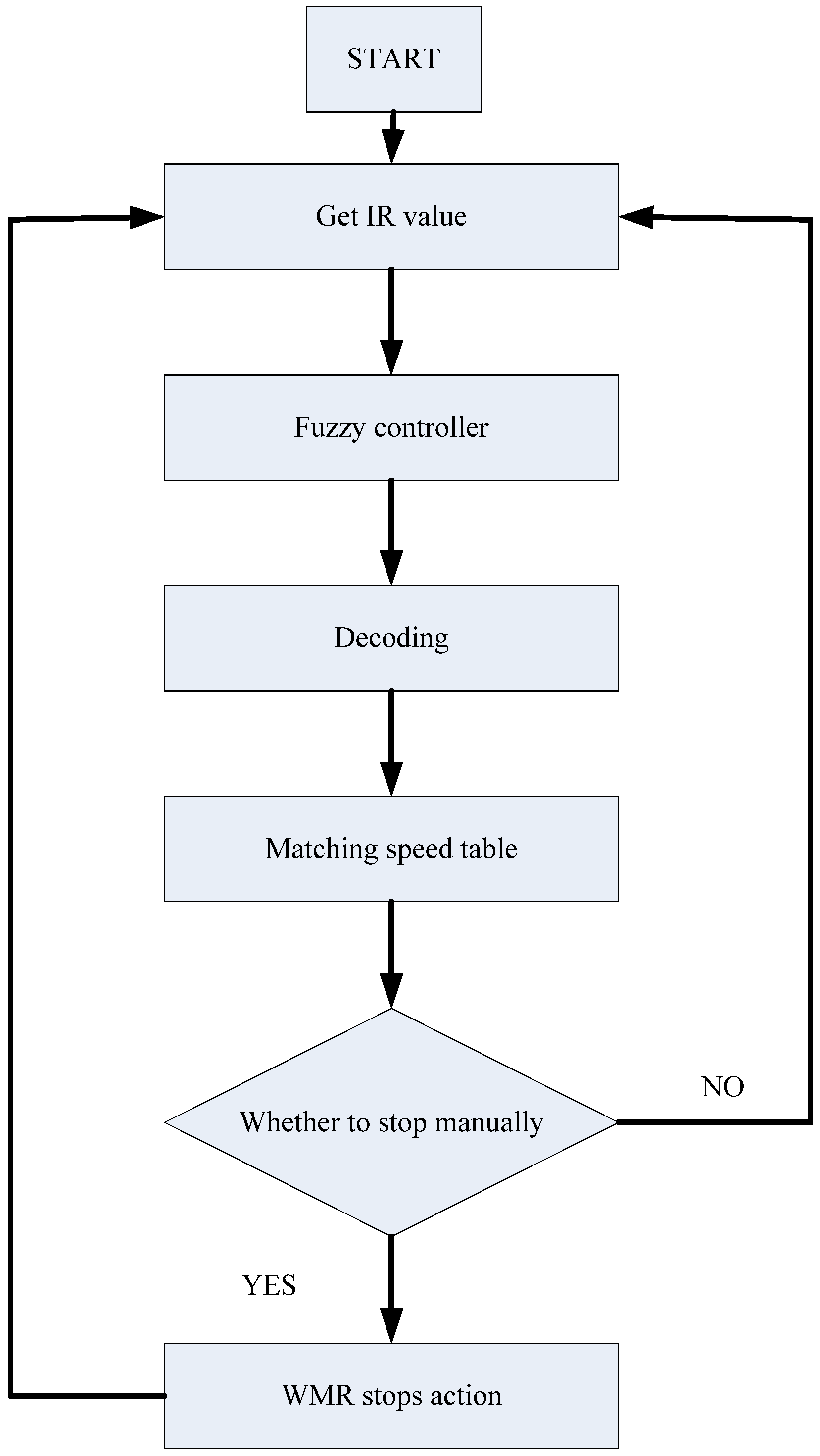
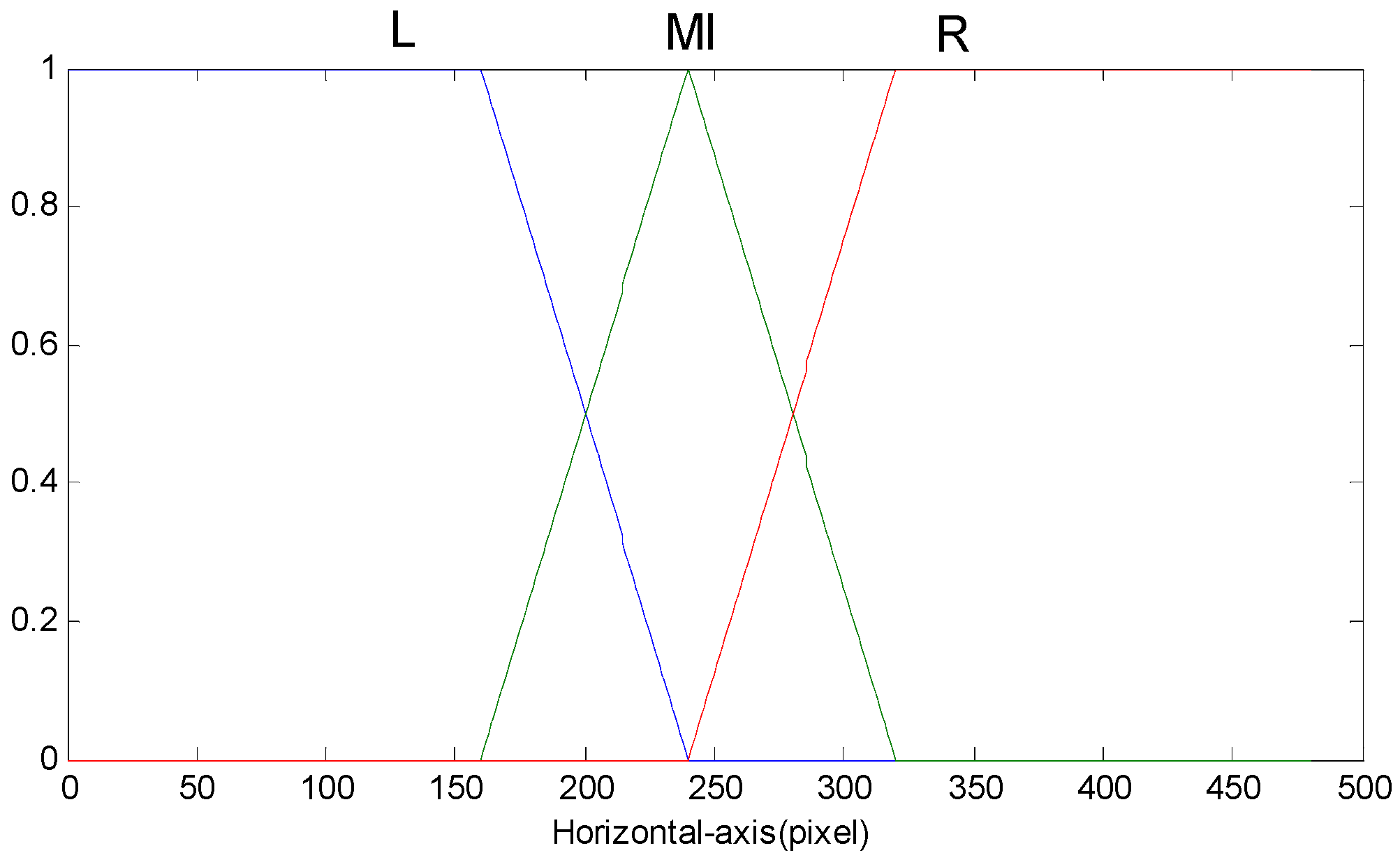
3. Fuzzy Control
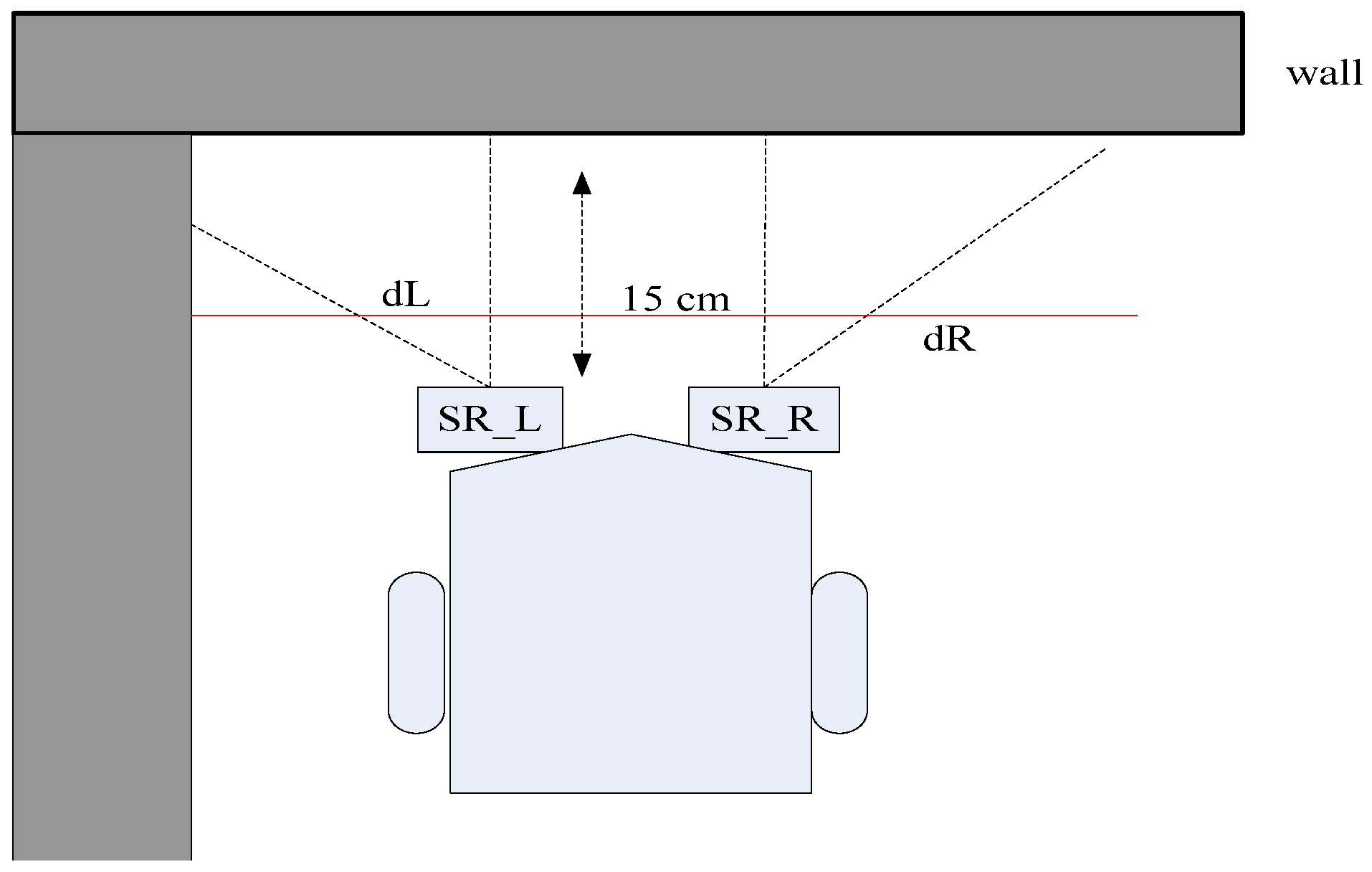
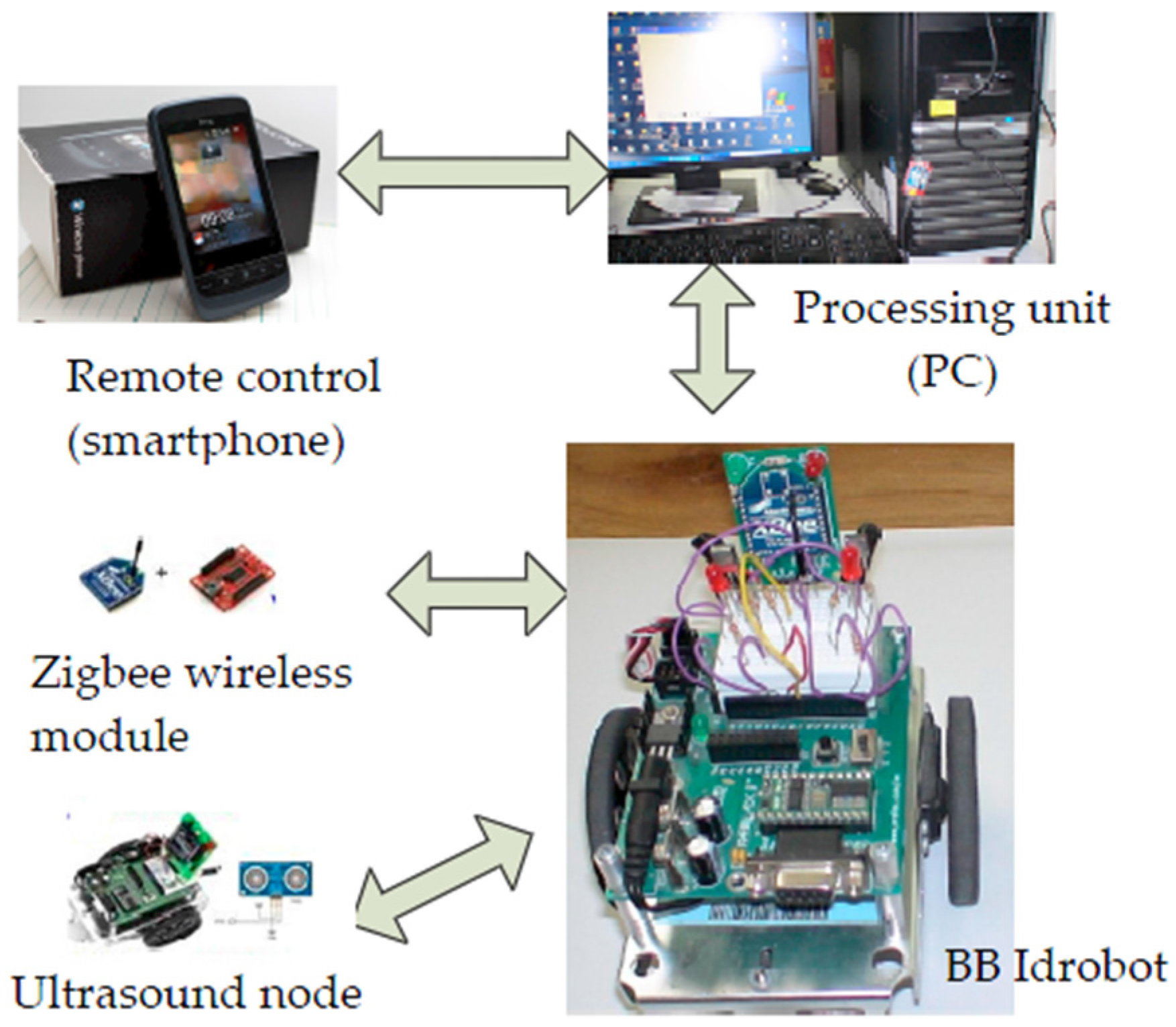
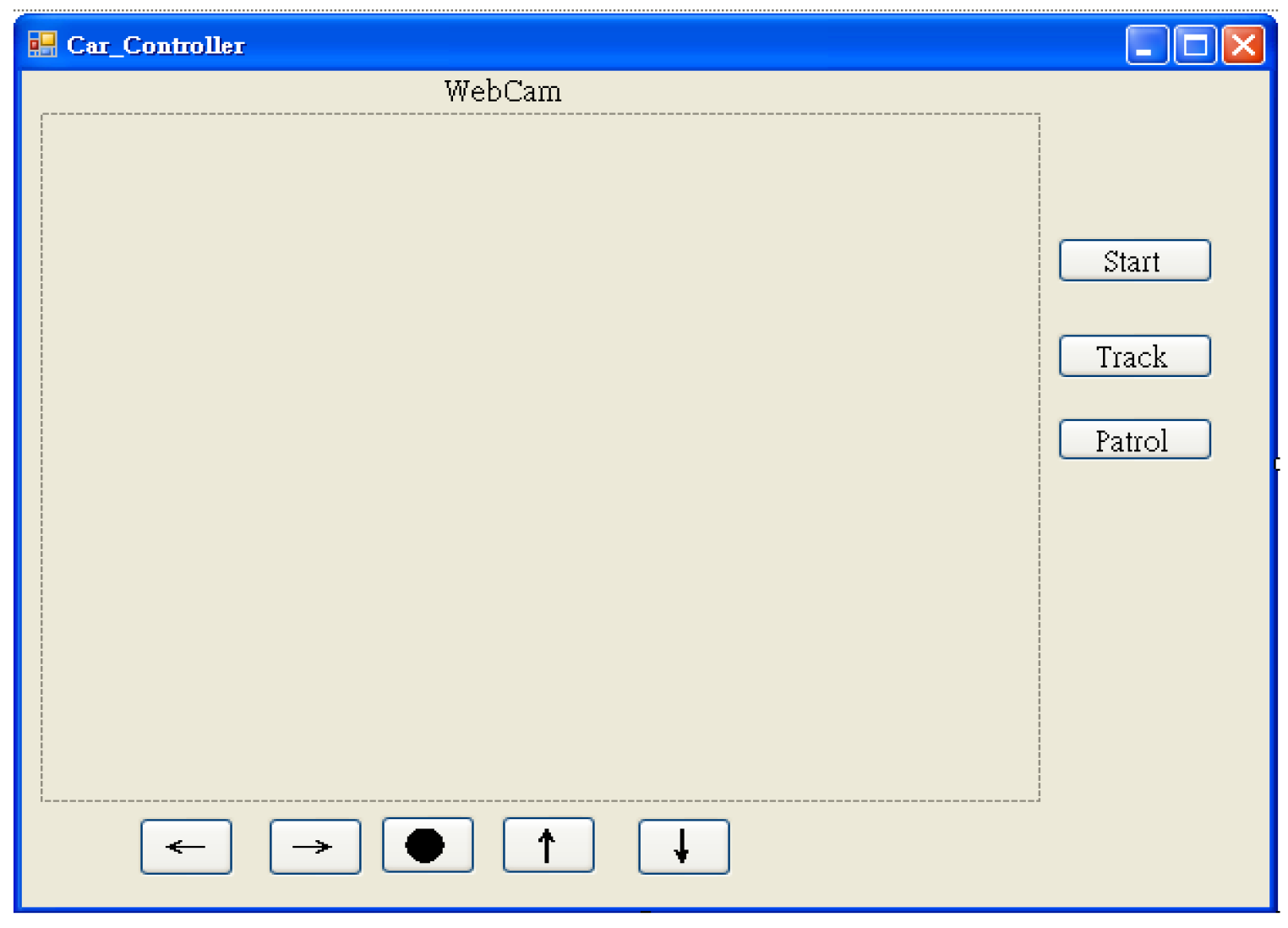
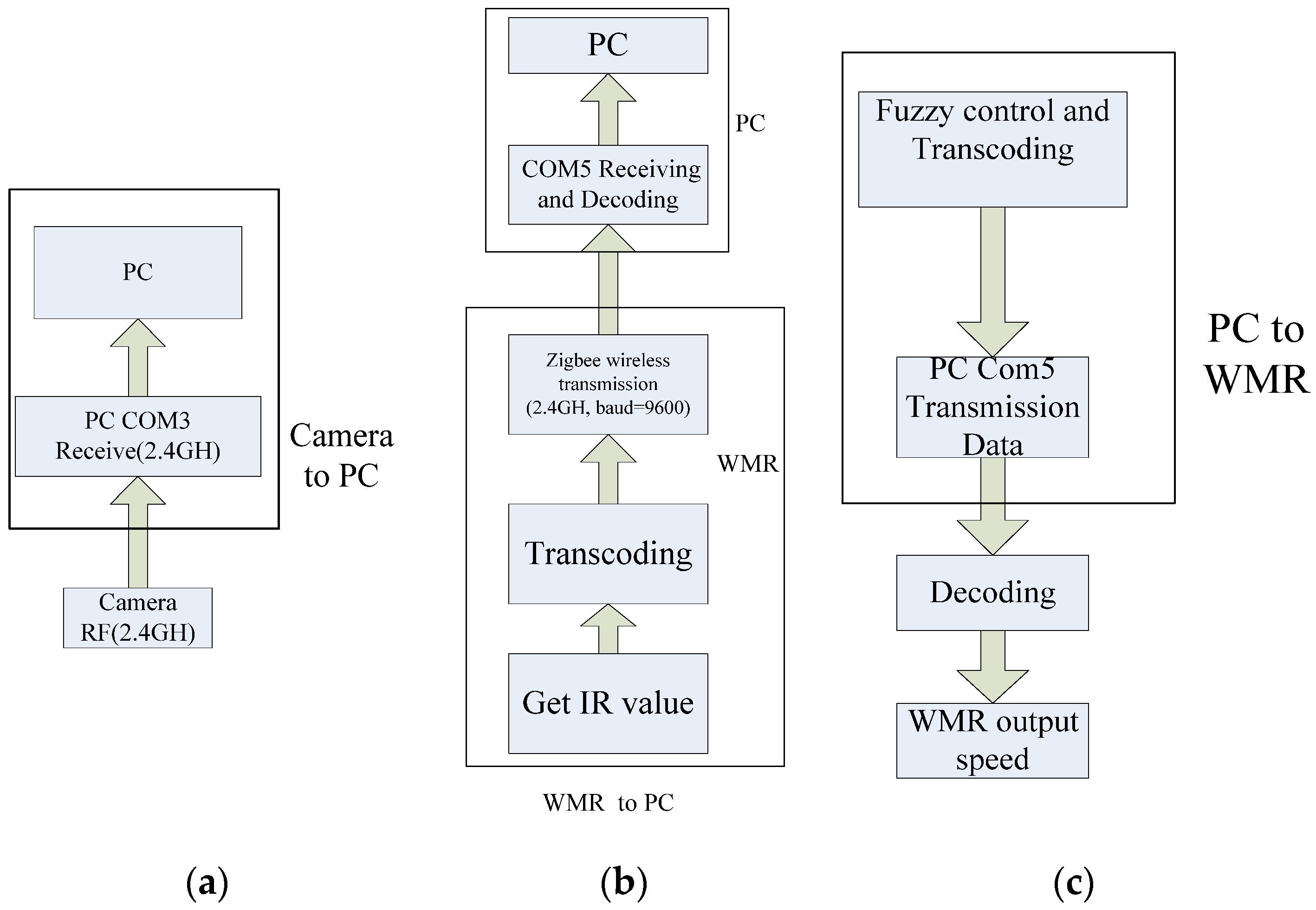
4. Experimental Settings
5. Experimental Results
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Juang, J.G.; Hsu, K.J.; Lin, C.M. Path following of a wheeled mobile robot based on image processing and adaptive CMAC. J. Marine Sci. Technol. 2014, 22, 331–340. [Google Scholar]
- Juang, J.G.; Chen, H.S.; Lin, C.C. Intelligent path tracking and motion control for wheeled mobile robot. GESTS Int. Trans. Comput. Sci. Eng. 2010, 61, 57–68. [Google Scholar]
- Juang, J.G.; Yu, C.L.; Lin, C.M.; Yeh, R.G.; Rudas, I.J. Real-time image recognition and path tracking to wheeled mobile robot for taking an elevator. Acta Polytech. Hung. 2013, 10, 5–23. [Google Scholar]
- Juang, J.G.; Wang, J.A. Indoor map building by laser sensor and positioning algorithms. Appl. Mech. Mater. 2015, 765, 752–756. [Google Scholar] [CrossRef]
- Chen, Y.S.; Wang, W.H.; Juang, J.G. Application of Intelligent Computing to Autonomous Vehicle Control. In Proceedings of the 2010 IEEE World Congress on Computational Intelligence, Barcelona, Spain, 18–23 July 2010.
- Lin, C.C.; Juang, J.G. An Obstacle Avoiding Control Strategy for Wheeled Mobile Robot. In Proceedings of the 2008 National Symposium on System Science and Engineering, ILan, Taiwan, 6 June 2008.
- Wang, W.H.; Juang, J.G. Application of Localization System to WMR Path Planning and Parking Control. In Proceedings of the 2009 IEEE International Conference on Advanced Intelligent Mechatronics, Singapore, 14–17 July 2009.
- Chen, Y.S.; Juang, J.G. Intelligent Obstacle Avoidance Strategy for Wheeled Mobile Robot. In Proceedings of the 2009 ICROS-SICE International Joint Conference, Fukuoka, Japan, 18–21 August 2009.
- Juang, J.G.; Wu, C.H. Type-2 fuzzy control of a mobile robot for avoiding moving object. Key Eng. Mater. J. 2011, 474, 1300–1305. [Google Scholar] [CrossRef]
- Juang, J.G.; Lo, C.W. Computer-aided mobile robot control based on visual and fuzzy systems. Adv. Sci. Lett. 2012, 13, 84–89. [Google Scholar] [CrossRef]
- Wu, C.H.; Juang, J.G. Application of Image Process and Fuzzy Theory to Dynamic Obstacle Avoidance for an Autonomous Vehicle. In Proceedings of the 2010 National Symposium on System Science and Engineering, Taipei, Taiwan, 1–2 July 2010.
- Zhan, J.J.; Wu, C.H.; Juang, J.G. Application of Image Process and Distance Computation to WMR Obstacle Avoidance and Parking Control. In Proceedings of the 5th IEEE Conference on Industrial Electronics and Applications, Taichung, Taiwan, 15–17 January 2010; pp. 1264–1269.
- Lee, T.H.; Lam, H.K.; Leung, F.H.F.; Tam, P.K.S. Fuzzy Model Reference Control of Wheeled Mobile Robots. In Proceedings of the 27th Annual Conference of the IEEE Industrial Electronics Society, Denver, CO, USA, 29 November–2 December 2001; pp. 570–573.
- Seder, M.; Petrovi’c, I. Dynamic Window Based Approach to Mobile Robot Motion Control in the Presence of Moving Obstacles. In Proceedings of the 2007 IEEE International Conference on Robotics and Automation, Roma, Italy, 10–14 April 2007; pp. 1987–1991.
- Chung, Y.; Park, C.; Harashima, F. A position control differential drive wheeled mobile robot. IEEE Trans. Ind. Electron. 2001, 48, 853–863. [Google Scholar] [CrossRef]
- Kelber, C.R.; Dreger, R.S.; Comes, G.G.K.; Webber, D.; Schirmbeck, J.; Netto, R.H.; Borges, D.A. Cell-phone Guided Vehicle, an Application Based on a Drive-by-wire Automated System. In Proceedings of the 2003 IEEE Intelligent Vehicles Symposium, Columbus, OH, USA, 9–11 June 2003.
- Juang, S.Y.; Juang, J.G. Real-time Indoor Surveillance Based on Smartphone and Mobile Robot. In Proceedings of the 2012 IEEE International Conference on Industrial Informatics, Beijing, China, 25–27 July 2012.
- HSV COLOR SPACE. Available online: http://www.topbits.com/hsv.html (accessed on 20 May 2012).
- Bunks. The HSV Colorspace. Available online: http://gimsavvy.com/ BOOK/index.html?node50.html (accessed on 20 May 2012).
- Hsiao, Y.L. Navigation and Obstacle Avoidance of Wheeled Mobile Manipulators with an Eye-in-Hand Vision System. Master Thesis, Department of Mechanical Engineering, National Cheng Kung University, Taiwan, July 2005. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| D | Y | N | M | F | |
|---|---|---|---|---|---|
| X | |||||
| L | LMS | LMF | LS | ||
| MI | LMM | LM | LFF | ||
| R | LFM | LFS | LF | ||
| D | Y | RF | RM | RC | |
|---|---|---|---|---|---|
| X | |||||
| LF | LMS | LMF | LC | ||
| LM | LMM | LM | LFF | ||
| LC | LFM | LFS | LF | ||
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Juang, S.-Y.; Juang, J.-G. Remote Control of a Mobile Robot for Indoor Patrol. Appl. Sci. 2016, 6, 82. https://doi.org/10.3390/app6030082
Juang S-Y, Juang J-G. Remote Control of a Mobile Robot for Indoor Patrol. Applied Sciences. 2016; 6(3):82. https://doi.org/10.3390/app6030082
Chicago/Turabian StyleJuang, Shih-Yao, and Jih-Gau Juang. 2016. "Remote Control of a Mobile Robot for Indoor Patrol" Applied Sciences 6, no. 3: 82. https://doi.org/10.3390/app6030082