Comparison of Implicit and Explicit Vegetation Representations in SWAN Hindcasting Wave Dissipation by Coastal Wetlands in Chesapeake Bay

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
1.1. Background
1.2. SWAN Model Description
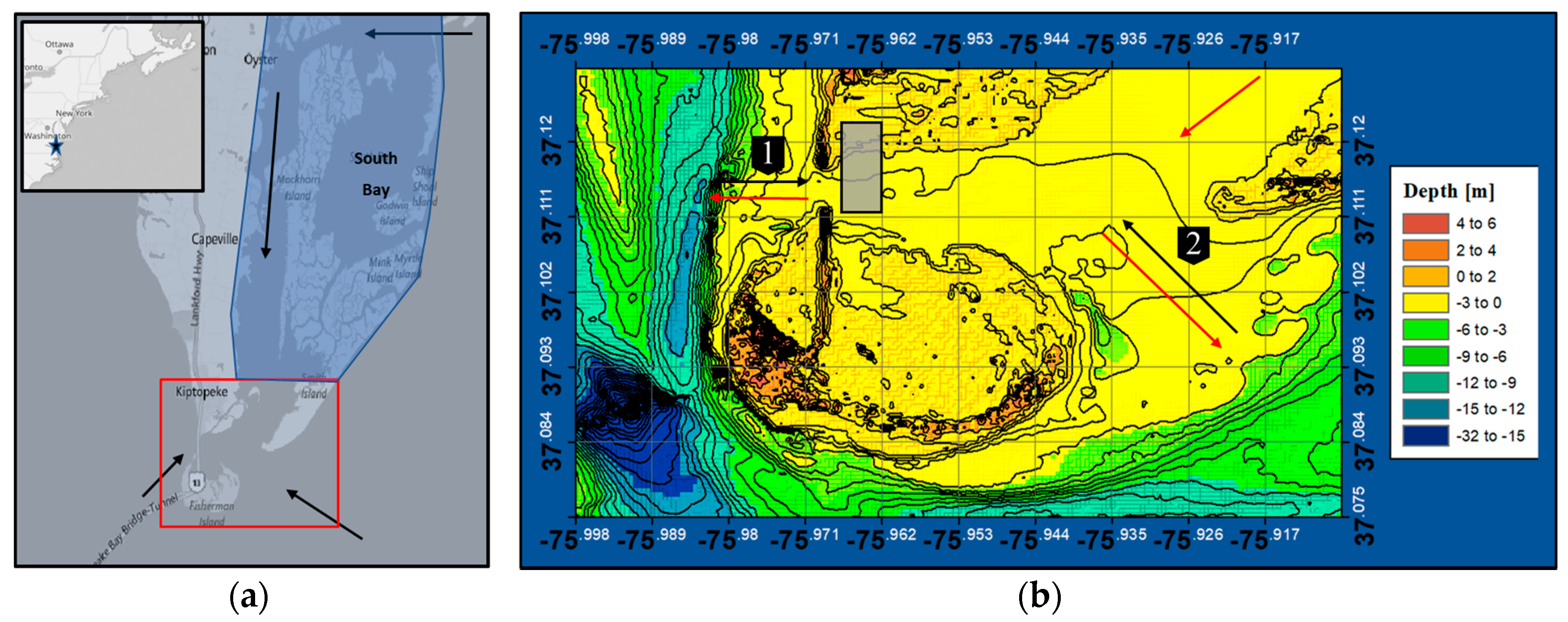
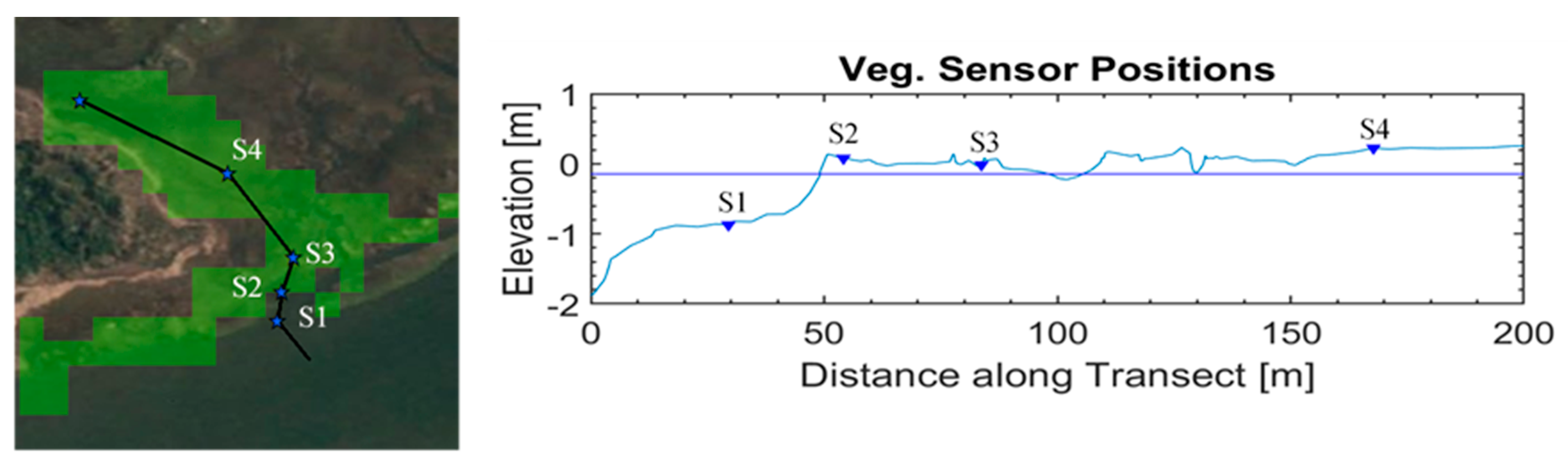
1.3. Site Description
1.4. Data Description
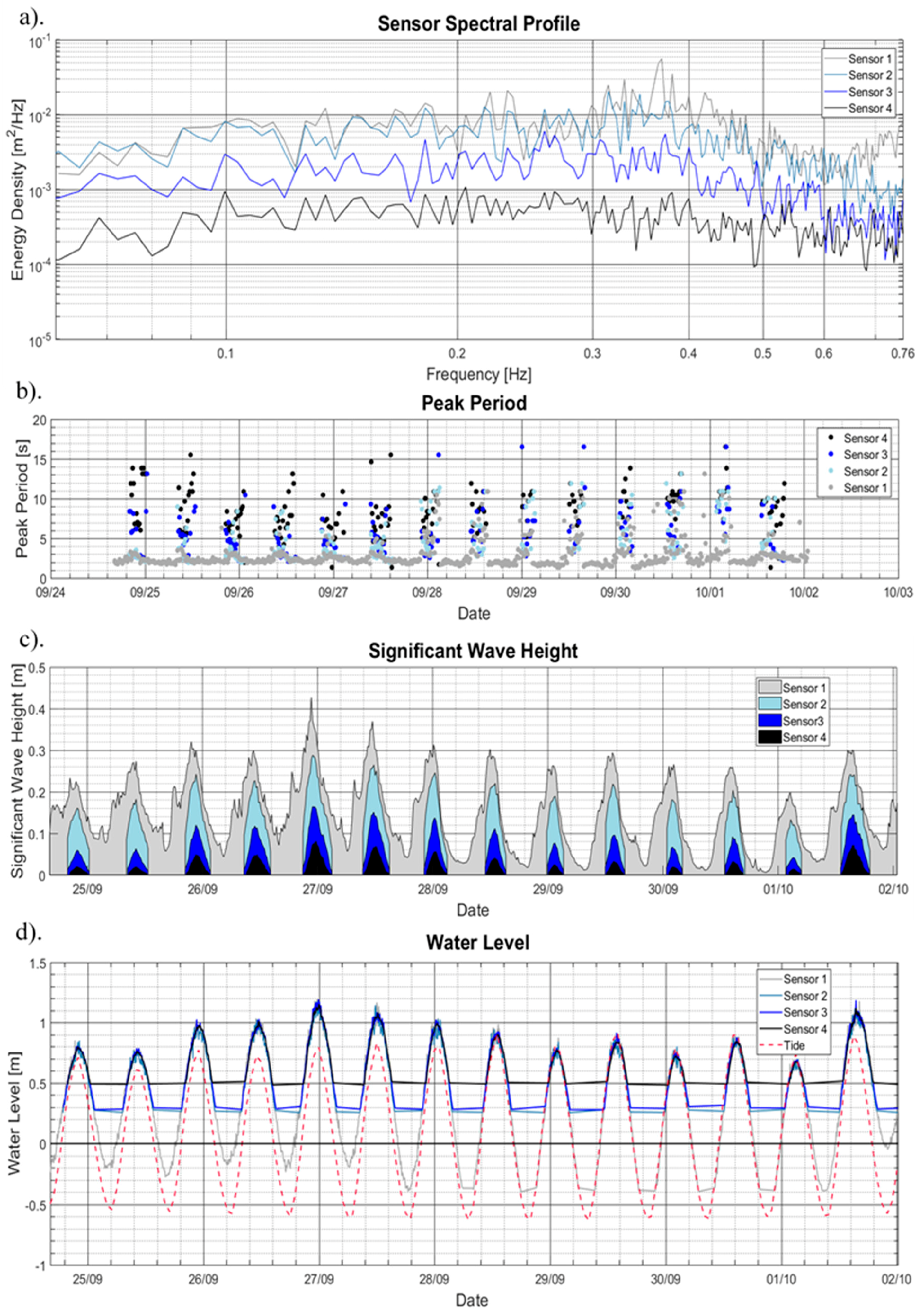
1.4.1. General Wave Climate
1.4.2. Wind
2. Modeling Approach
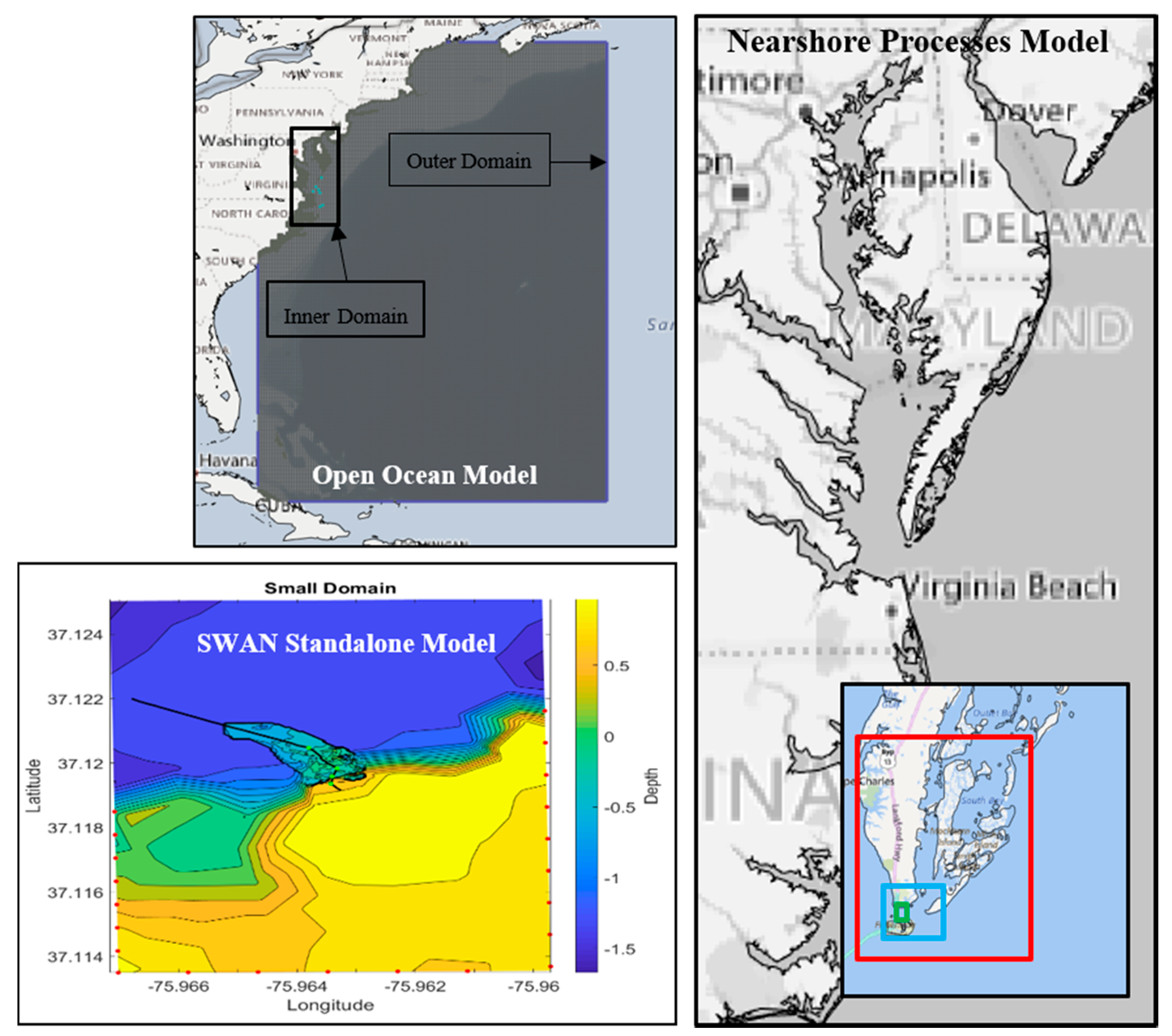
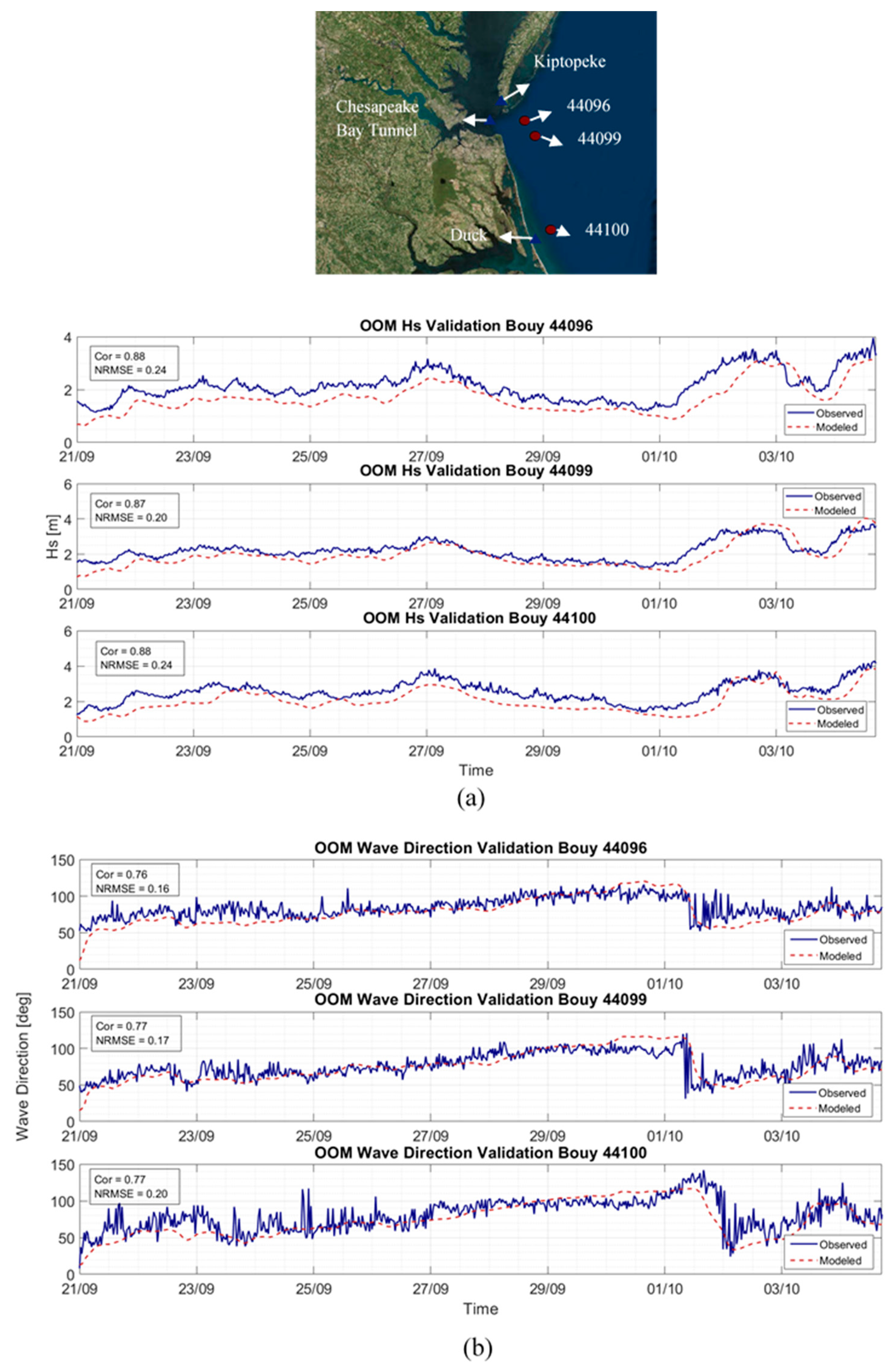
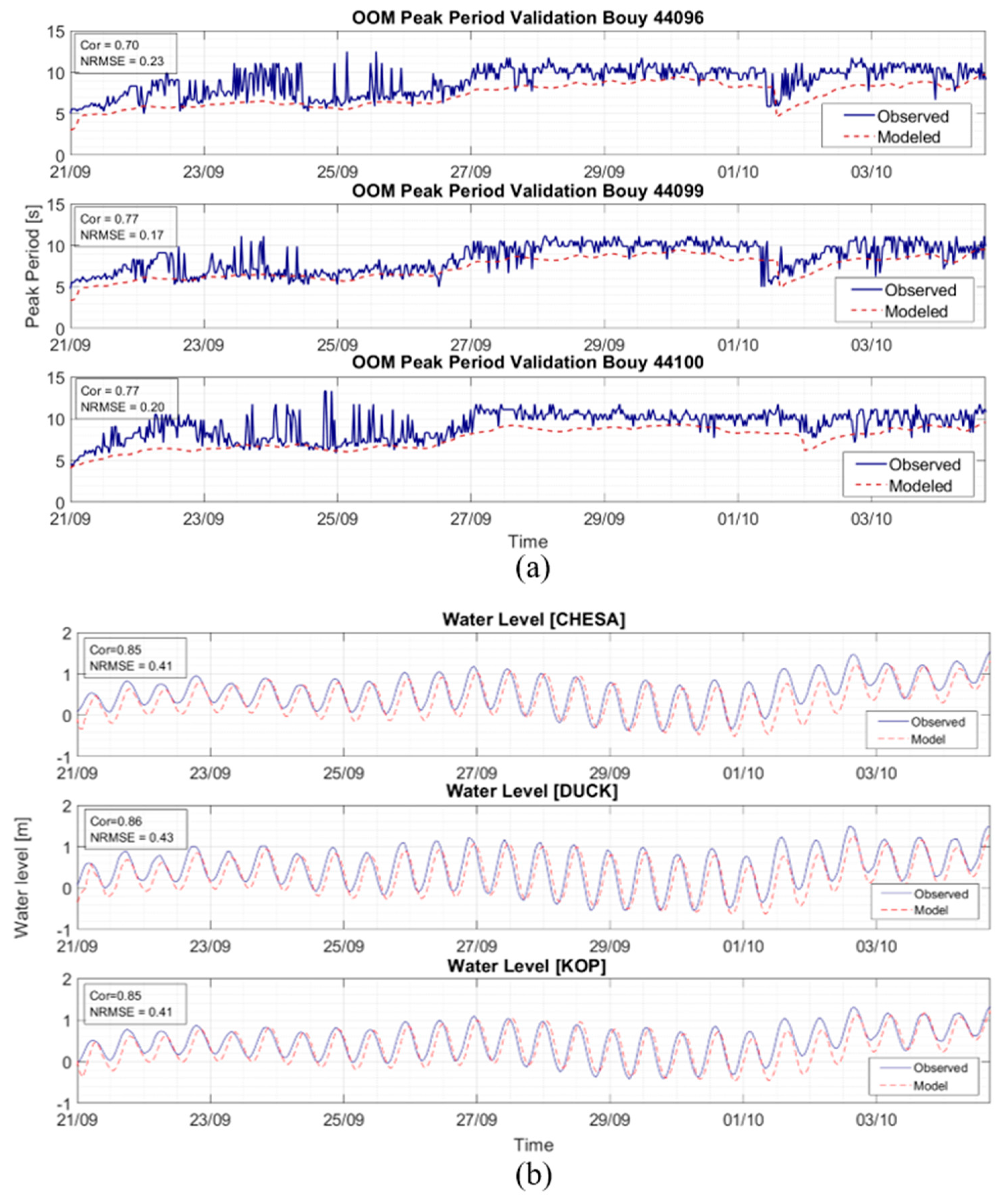
2.1. Open Ocean Model (OOM)
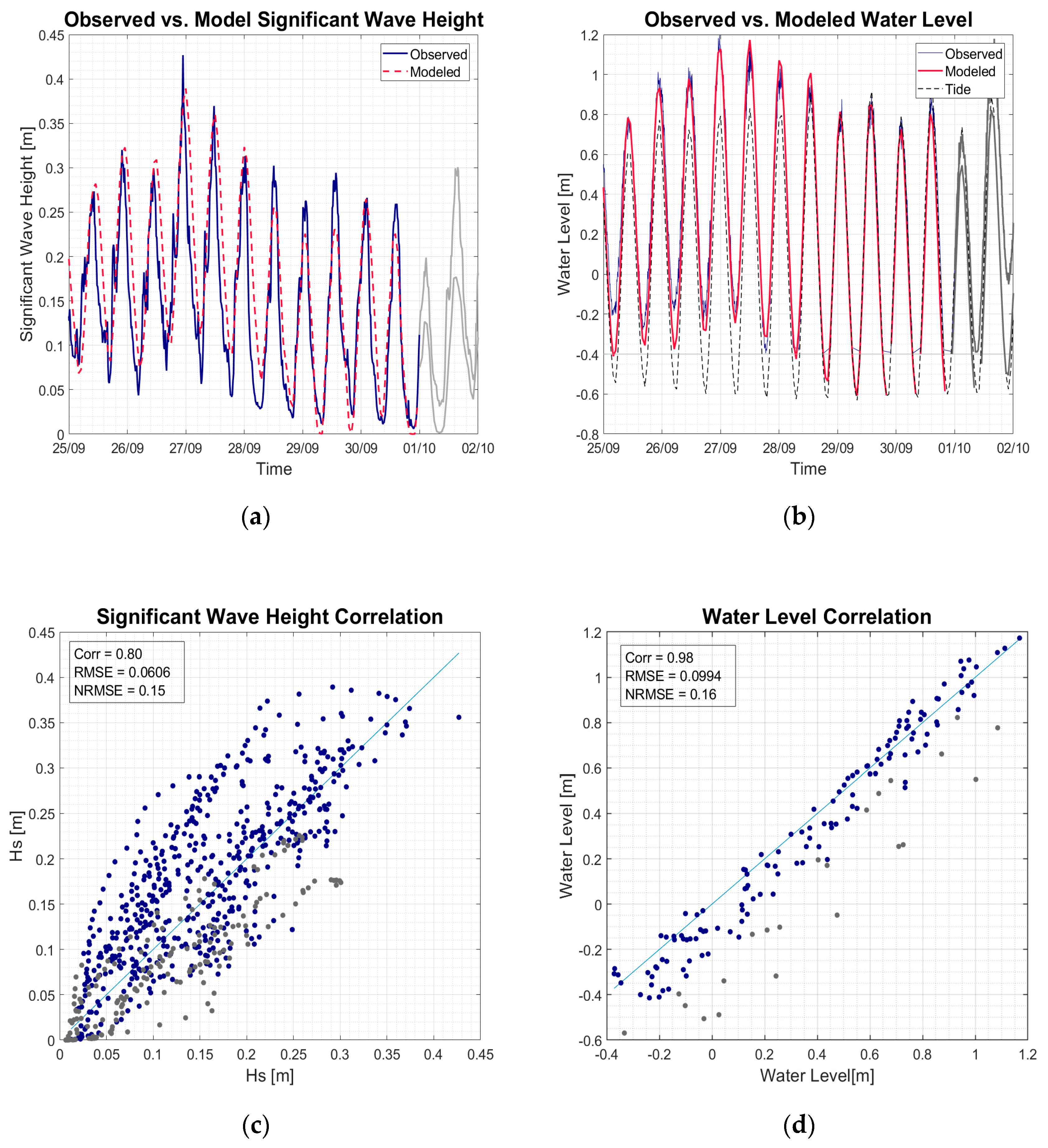
2.2. Nearshore Processes Model (NPM)
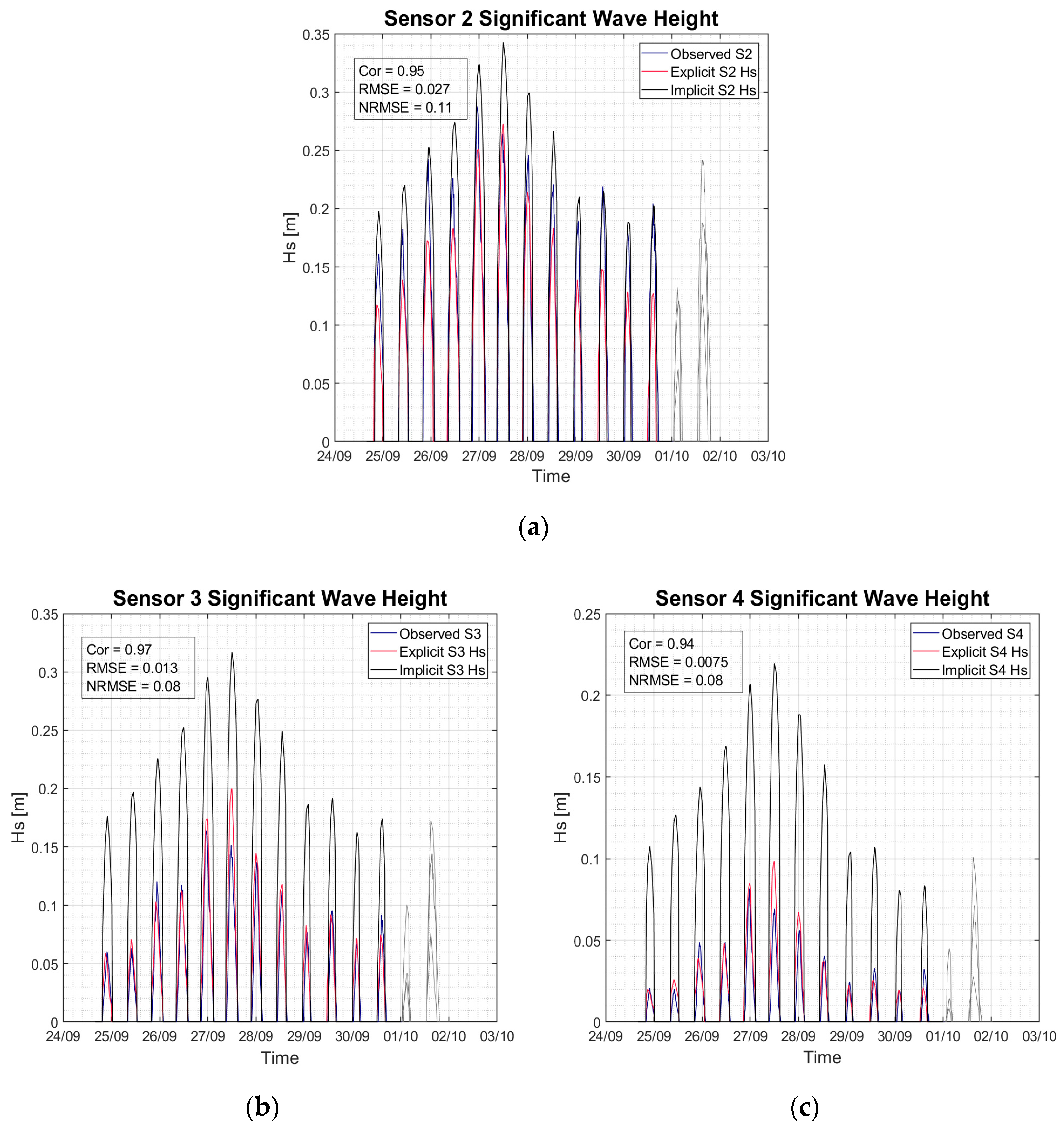
2.3. SWAN Standalone Model (SSAM)
3. Results
3.1. Open Ocean Model
3.2. Nearshore Processes Model
3.3. SWAN Standalone Model Validation & Comparison
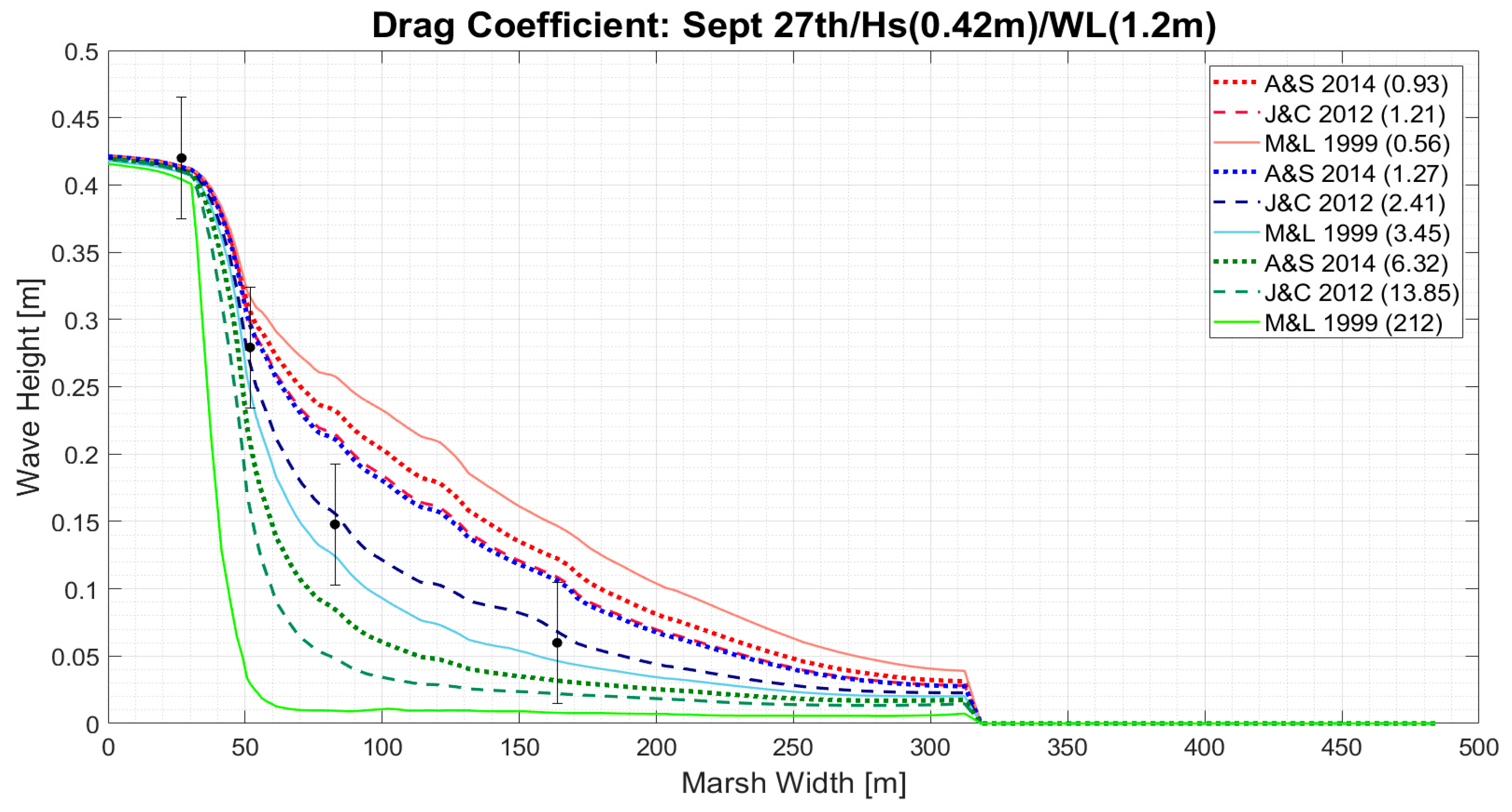
3.3.1. Explicit Representation: Drag Coefficient Profiles
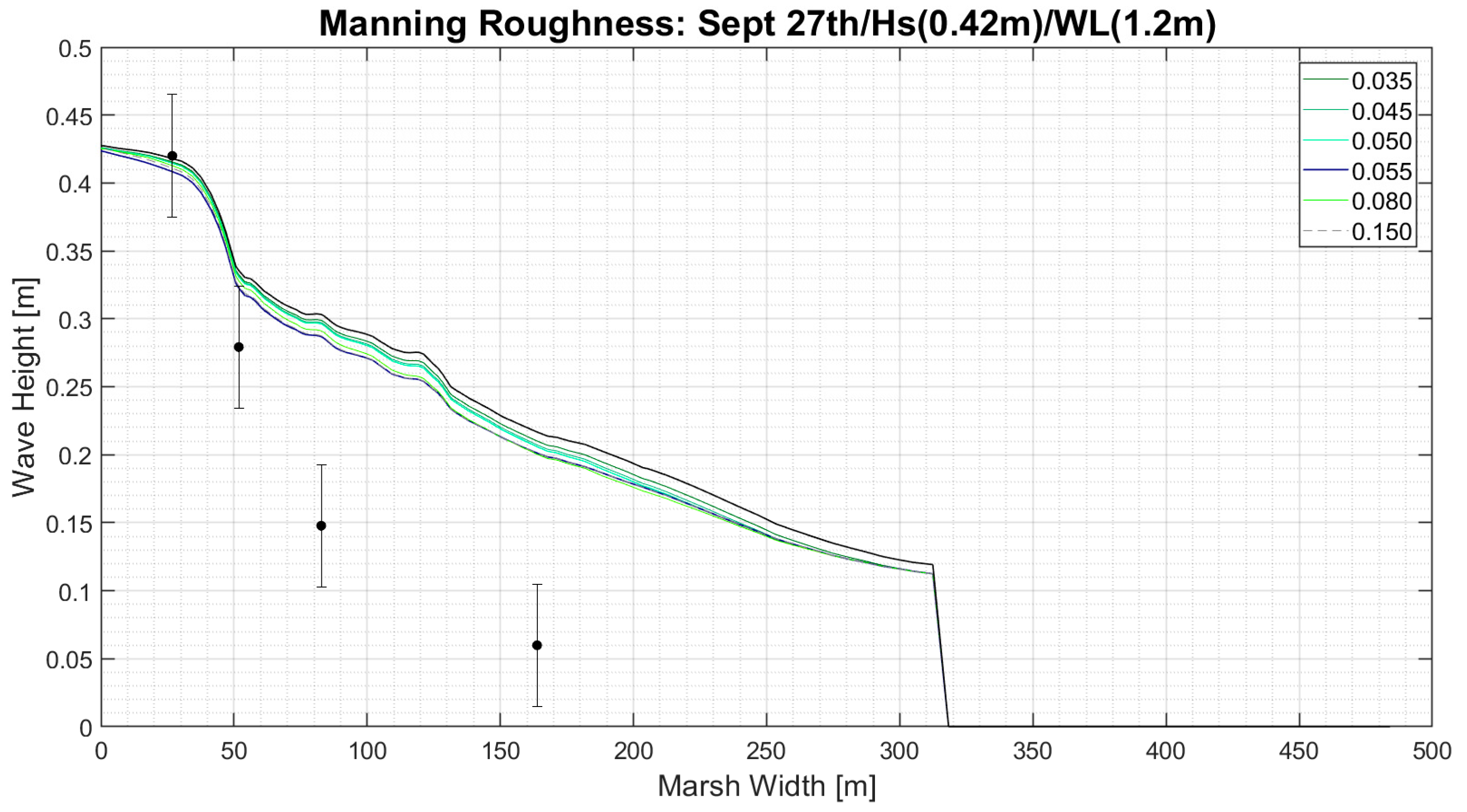
3.3.2. Implicit Representation: Manning Roughness Coefficient Profiles
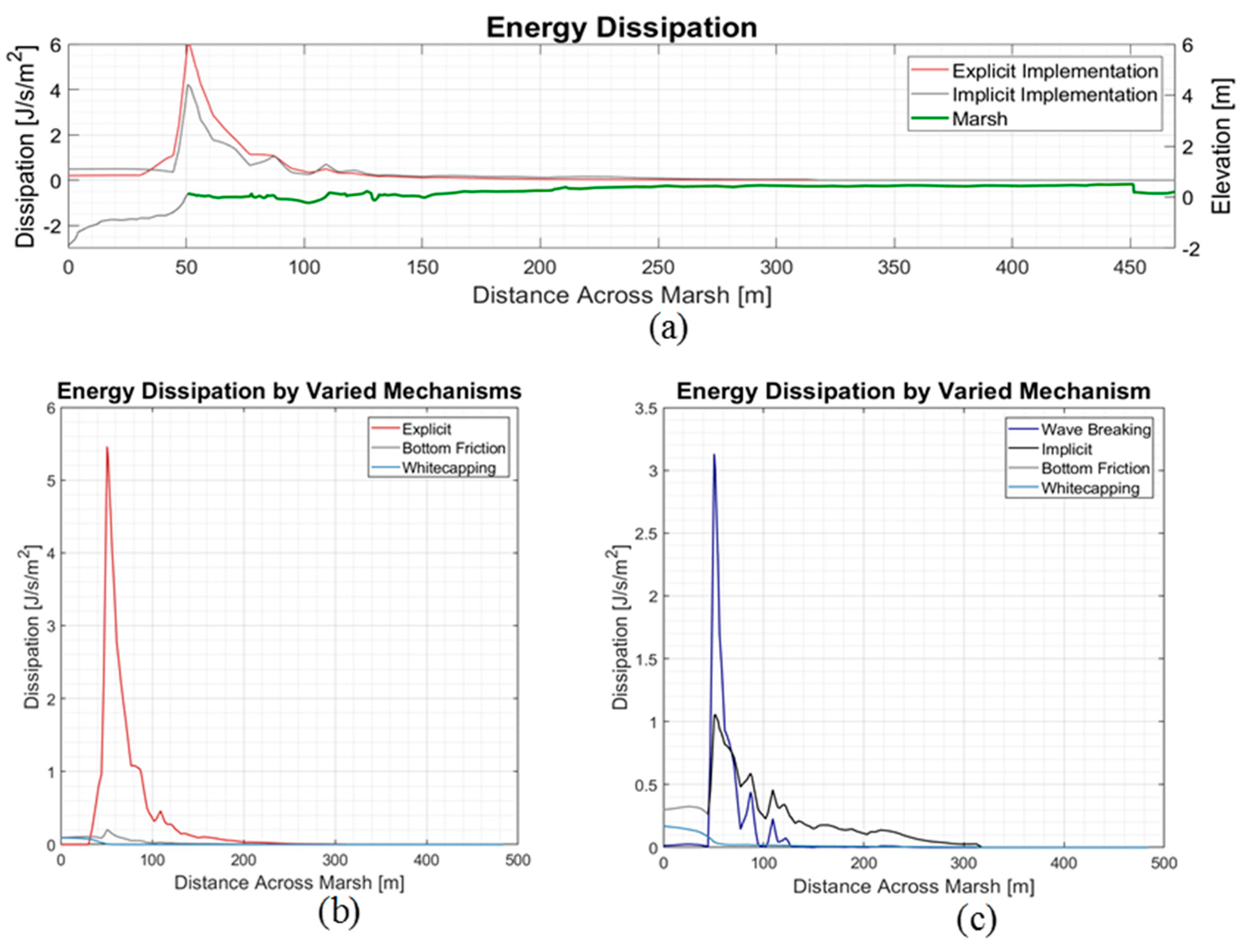
3.3.3. Wave Energy Dissipation Processes
4. Discussion
4.1. Model Calibration and Validation
4.2. Explicit Versus Implicit Vegetation Representations
5. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Zhang, K.; Liu, H.; Li, Y.; Xu, H.; Shen, J.; Rhome, J.; Smith, T.J., III. The role of mangroves in attenuating storm surges. Estuar. Coast. Shelf Sci. 2012, 102, 11–23. [Google Scholar] [CrossRef]
- Vuik, V.; Jonkman, S.N.; Borsje, B.W.; Suzuki, T. Nature-based flood protection: The efficiency of vegetated foreshores for reducing wave loads on coastal dikes. Coast. Eng. 2016, 116, 42–56. [Google Scholar] [CrossRef]
- Camfield, F.E. Wind-Wave Propagation Over Flooded, Vegetated Land; Coastal Engineering Research Center: Fort Belvoir, VA, USA, 1977. [Google Scholar]
- Kobayashi, N.; Raichle, A.W.; Asano, T. Wave attenuation by vegetation. J. Waterw. Port Coast. Ocean Eng. 1993, 119, 30–48. [Google Scholar] [CrossRef]
- Manning, R.; Griffith, J.P.; Pigot, T.; Vernon-Harcourt, L.F. On the Flow of Water in Open Channels and Pipes; Institution of Civil Engineers: Dublin, Ireland, 1890. [Google Scholar]
- Wu, F.-C.; Shen, H.W.; Chou, Y.-J. Variation of roughness coefficients for unsubmerged and submerged vegetation. J. Hydraul. Eng. 1999, 125, 934–942. [Google Scholar] [CrossRef]
- Smith, J.M. Modeling Nearshore Waves for Hurricane Katrina; Engineer Research And Development Center: Vicksburg, MS, USA, 2007. [Google Scholar]
- Wamsley, T.V.; Cialone, M.A.; Smith, J.M.; Atkinson, J.H.; Rosati, J.D. The potential of wetlands in reducing storm surge. Ocean Eng. 2010, 37, 59–68. [Google Scholar] [CrossRef]
- Augustin, L.N.; Irish, J.L.; Lynett, P. Laboratory and numerical studies of wave damping by emergent and near-emergent wetland vegetation. Coast. Eng. 2009, 56, 332–340. [Google Scholar] [CrossRef]
- Méndez, F.J.; Losada, I.J.; Losada, M.A. Hydrodynamics induced by wind waves in a vegetation field. J. Geophys. Res. Oceans 1999, 104, 18383–18396. [Google Scholar] [CrossRef] [Green Version]
- Neumeier, U.; Amos, C.L. The influence of vegetation on turbulence and flow velocities in European salt-marshes. Sedimentology 2006, 53, 259–277. [Google Scholar] [CrossRef] [Green Version]
- Anderson, M.E.; Smith, J.M. Wave attenuation by flexible, idealized salt marsh vegetation. Coast. Eng. 2014, 83, 82–92. [Google Scholar] [CrossRef]
- Dalrymple, R.A.; Kirby, J.T.; Hwang, P.A. Wave diffraction due to areas of energy dissipation. J. Waterw. Port Coast. Ocean Eng. 1984, 110, 67–79. [Google Scholar] [CrossRef]
- Houser, C.; Trimble, S.; Morales, B. Influence of blade flexibility on the drag coefficient of aquatic vegetation. Estuaries Coasts 2015, 38, 569–577. [Google Scholar] [CrossRef]
- Cavallaro, L.; Viviano, A.; Paratore, G.; Foti, E. Experiments on surface waves interacting with flexible aquatic vegetation. Ocean Sci. J. 2018, 53, 461–474. [Google Scholar] [CrossRef]
- Luhar, M.; Nepf, H. Wave-induced dynamics of flexible blades. J. Fluids Struct. 2016, 61, 20–41. [Google Scholar] [CrossRef] [Green Version]
- Cavallaro, L.; Re, C.L.; Paratore, G.; Viviano, A.; Foti, E. Response of posidonia oceanica to wave motion in shallow-waters-preliminary experimental results. Coast. Eng. Proc. 2011, 1, 49. [Google Scholar] [CrossRef]
- Suzuki, T.; Zijlema, M.; Burger, B.; Meijer, M.C.; Narayan, S. Wave dissipation by vegetation with layer schematization in swan. Coast. Eng. 2012, 59, 64–71. [Google Scholar] [CrossRef]
- Smith, J.M.; Bryant, M.A.; Wamsley, T.V. Wetland buffers: Numerical modeling of wave dissipation by vegetation. Earth Surf. Process. Landf. 2016, 41, 847–854. [Google Scholar] [CrossRef]
- Nowacki, D.J.; Beudin, A.; Ganju, N.K. Spectral wave dissipation by submerged aquatic vegetation in a back-barrier estuary. Limnol. Oceanogr. 2017, 62, 736–753. [Google Scholar] [CrossRef] [Green Version]
- Van Rooijen, A.; Van Thiel de Vries, J.; McCall, R.; Van Dongeren, A.; Roelvink, J.; Reniers, A. Modeling of wave attenuation by vegetation with xbeach. In Proceedings of the E-proceedings of the 36th IAHR World Congress, The Hague, The Netherlands, 28 June–3 July 2015. [Google Scholar]
- Booij, N.; Ris, R.C.; Holthuijsen, L.H. A third-generation wave model for coastal regions—1. Model description and validation. J. Geophys. Res. Oceans 1999, 104, 7649–7666. [Google Scholar] [CrossRef]
- Kennedy, A.B.; Chen, Q.; Kirby, J.T.; Dalrymple, R.A. Boussinesq modeling of wave transformation, breaking, and runup. I: 1D. J. Waterw. Port Coast. Ocean Eng. 2000, 126, 39–47. [Google Scholar] [CrossRef]
- Theophanis, V.K.; Nigel, P.T. Breaking waves in the surf and swash zone. J. Coast. Res. 2003, 19, 514–528. [Google Scholar]
- Viviano, A.; Musumeci, R.E.; Foti, E. A nonlinear rotational, quasi-2dh, numerical model for spilling wave propagation. Appl. Math. Model. 2015, 39, 1099–1118. [Google Scholar] [CrossRef]
- Madsen, O.S.; Poon, Y.-K.; Graber, H.C. Spectral wave attenuation by bottom friction: Theory. In Proceedings of the 21st International Conference on Coastal Engineering, Malaga, Spain, 20–25 June 1988; American Society of Civil Engineers: New York, NY, USA, 1988; pp. 492–504. [Google Scholar]
- Arcement, G.J.; Schneider, V.R. Guide for Selecting Manning’s Roughness Coefficients for Natural Channels and Flood Plains; US Government Printing Office: Washington, DC, USA, 1989.
- U.S. Geological Survey. Geological Survey Gap/Landfire National Terrestrial Ecosystems; U.S. Geological Survey: Reston, VA, USA, 2016.
- Mendez, F.J.; Losada, I.J. An empirical model to estimate the propagation of random breaking and nonbreaking waves over vegetation fields. Coast. Eng. 2004, 51, 103–118. [Google Scholar] [CrossRef]
- Xiong, Y.; Berger, C.R. Chesapeake bay tidal characteristics. J. Water Resour. Prot. 2010, 2, 619. [Google Scholar] [CrossRef]
- Paquier, A.-E.; Haddad, J.; Lawler, S.; Ferreira, C.M. Quantification of the attenuation of storm surge components by a coastal wetland of the US Mid Atlantic. Estuaries Coasts 2017, 40, 930–946. [Google Scholar] [CrossRef]
- DOC; NOAA; NESDIS; NCEI. Virginia Beach Coastal Digital Elevation Model; National Oceanic and Atmospheric Administration: Silver Spring, MD, USA, 2007.
- IOC; IHO; BODC. Cemenary Edition of the GEBCO Digital Atlas; published on CD-ROM on behalf of the Intergovernmental Oceanographic Commission and the International Hydrographic Organization as part of the General Bathymetric Chart of the Oceans: Liverpool, UK, 2003. [Google Scholar]
- NOAA; NWS; NDBC; UD. National Data Buoy Center; National Centers for Environmental Information: Asheville, NC, USA, 1971.
- Egbert, G.D.; Erofeeva, S.Y. Efficient inverse modeling of barotropic ocean tides. J. Atmos. Ocean. Technol. 2002, 19, 183–204. [Google Scholar] [CrossRef]
- ECMRWF. Ecmwf’s operational model analysis, starting in 2011; Research Data Archive at the National Center for Atmospheric Research, Computational and Information Systems Laboratory: Boulder, CO, USA, 2011. [Google Scholar]
- Garzon, J.L.; Ferreira, C.M.; Padilla-Hernandez, R. Evaluation of weather forecast systems for storm surge modeling in the chesapeake bay. Ocean Dyn. 2018, 68, 91–107. [Google Scholar] [CrossRef]
- Manual, D.D.-F. Delft3D-3D/2D modelling suite for integral water solutions-hydro-morphodynamic s. Deltares Delft. Version 2014, 3, 34158. [Google Scholar]
- Hasselmann, K.; Barnett, T.; Bouws, E.; Carlson, H.; Cartwright, D.; Enke, K.; Ewing, J.; Gienapp, H.; Hasselmann, D.; Kruseman, P. Measurements of Wind-Wave Growth and Swell Decay during the Joint North Sea Wave Project (JONSWAP); Ergänzungsheft 8-12; Deutches Hydrographisches Institut: Hamburg, Germany, 1973. [Google Scholar]
- Bouws, E.; Komen, G. On the balance between growth and dissipation in an extreme depth-limited wind-sea in the southern north sea. J. Phys. Oceanogr. 1983, 13, 1653–1658. [Google Scholar] [CrossRef]
- Komen, G.J.; Cavaleri, L.; Donelan, M.; Hasselmann, K.; Hasselmann, S.; Janssen, P. Dynamics and Modelling of Ocean Waves; Komen, G.J., Cavaleri, L., Donelan, M., Hasselmann, K., Hasselmann, S., Janssen, P.A.E.M., Eds.; Cambridge University Press: Cambridge, UK, August 1996; p. 554. ISBN 0521577810. [Google Scholar]
- Van der Westhuysen, A.J.; Zijlema, M.; Battjes, J.A. Nonlinear saturation-based whitecapping dissipation in swan for deep and shallow water. Coast. Eng. 2007, 54, 151–170. [Google Scholar] [CrossRef]
- Massel, S. On the largest wave height in water of constant depth. Ocean Eng. 1996, 23, 553–573. [Google Scholar] [CrossRef]
- Nelson, R.C. Depth limited design wave heights in very flat regions. Coast. Eng. 1994, 23, 43–59. [Google Scholar] [CrossRef]
- Jadhav, R.S.; Chen, Q. Field investigation of wave dissipation over salt marsh vegetation during tropical cyclone. Coast. Eng. Proc. 2012, 1, 41. [Google Scholar] [CrossRef]
- Bunya, S.; Dietrich, J.C.; Westerink, J.; Ebersole, B.; Smith, J.; Atkinson, J.; Jensen, R.; Resio, D.; Luettich, R.; Dawson, C. A high-resolution coupled riverine flow, tide, wind, wind wave, and storm surge model for southern louisiana and mississippi. Part I: Model development and validation. Mon. Weather Rev. 2010, 138, 345–377. [Google Scholar] [CrossRef]
- Swart, D.H. Offshore Sediment Transport and Equilibrium Beach Profiles; Delft Hydraulics Laboratory: Delft, The Netherlands, 1974. [Google Scholar]












© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Baron-Hyppolite, C.; Lashley, C.H.; Garzon, J.; Miesse, T.; Ferreira, C.; Bricker, J.D. Comparison of Implicit and Explicit Vegetation Representations in SWAN Hindcasting Wave Dissipation by Coastal Wetlands in Chesapeake Bay. Geosciences 2019, 9, 8. https://doi.org/10.3390/geosciences9010008
Baron-Hyppolite C, Lashley CH, Garzon J, Miesse T, Ferreira C, Bricker JD. Comparison of Implicit and Explicit Vegetation Representations in SWAN Hindcasting Wave Dissipation by Coastal Wetlands in Chesapeake Bay. Geosciences. 2019; 9(1):8. https://doi.org/10.3390/geosciences9010008
Chicago/Turabian StyleBaron-Hyppolite, Christophe, Christopher H. Lashley, Juan Garzon, Tyler Miesse, Celso Ferreira, and Jeremy D. Bricker. 2019. "Comparison of Implicit and Explicit Vegetation Representations in SWAN Hindcasting Wave Dissipation by Coastal Wetlands in Chesapeake Bay" Geosciences 9, no. 1: 8. https://doi.org/10.3390/geosciences9010008
APA StyleBaron-Hyppolite, C., Lashley, C. H., Garzon, J., Miesse, T., Ferreira, C., & Bricker, J. D. (2019). Comparison of Implicit and Explicit Vegetation Representations in SWAN Hindcasting Wave Dissipation by Coastal Wetlands in Chesapeake Bay. Geosciences, 9(1), 8. https://doi.org/10.3390/geosciences9010008