Linear and angular pneumatic actuators are commonly used in the industry to design robot grippers. These actuators are based on the motion of a piston when an internal chamber has different pressures than the external pressure. The chamber must be sealed to avoid leaks and friction forces appear between piston-chamber and rod-chamber. These devices can be single or double acting. Pneumatic actuators can be created from the deformation of the chamber. Pneumatic artificial muscles are based on the deformation of an elastic membrane, their motions are lineal and can work with misalignments or displacements.
With the AM process, it is possible to create pneumatic actuators based on the deformation of elastic chambers manufactured in polyamide. The chamber shapes and operating pressure define actuator motion, stroke and force. Proposed AM actuators are made in PA2200, approved as food contact material by FDA and manufactured with an EOSint P380, a rapid prototype selective laser sintering machine. This plastic is between three to eight times lighter than the metals currently used for industrial pneumatic actuators. Their speed is defined by the volume of the chamber, the elastic module of the material and difficulties of the air to come in and to leave. If the shape of actuator is the same, AM actuators have higher return speed than elastomeric pneumatic actuators manufactured in silicone. Compared with the silicone, despite of the strain limitations of polyamide, AM actuators can be designed for a motion, range and force needed to develop robot grippers for food handling. AM actuators are made in a single part. Engineers do not need to adapt their gripper mechanisms to standard actuators and can develop an AM actuator as gripper features request. The AM actuator length is lower than the standard one because no rod is needed, only one air connection is needed and can be designed to save volume, and does not need room for the spring to return the piston. The AM actuators are compliant. They do not need elastic couplings to be connected to a gripper mechanism. The force control is complex, with the same pressure external force varies with the position of the actuator. Polyamide can suffer permanent deformations with long term stresses. The AM actuator gripper should be tested to ensure a large number of cycles for industrial purpose.
3.3. AM for the Design of Pneumatic Robot Grippers
Food handling with robots can damage the products when the pressure against products is high. Fast robot motions are necessary for profitable robotic cells. A robot gripper for food handling should work at high speed, and the mass of fingers and gripper mechanism should be low to reduce impact on the product.
Pneumatic standard grippers can fulfil the requirements for food handling with robots, usually with parallel or angular motion. Parallel grippers ensure constant grasp force during all the gripper fingers movement avoiding squeezing forces and are used when the dimensions of the parts have a wide variability. Angular grippers give larger grasping capability for heavy loads and are preferred when high forces are needed. For food handling with robots in most of the cases the standard pneumatic grippers do not fulfil the requirements and engineers need to develop their own mechanism to achieve the desired stroke, type of motion and force. To achieve these requirements engineers need to adapt their gripper mechanism to the features of pneumatic standard cylinders. The kinematics of gripper mechanism defines the fingers stroke, kind of motion and the relation between actuator force-speed and fingers force-speed-position. Mechanism components are made or designed to be rigid bodies and they are joined with shafts and sliders. The joints of gripper mechanism need adequate accuracy to work soft. The join of the pneumatic cylinder rod and gripper mechanism sometimes needs self-aligning couplers to absorb misalignments or displacements. If components and joints are not within tolerances the mechanism can block. If the gripper is made with hard and heavy components without elastic couplings, food products will absorb the energy of the mechanism when grasped and hard contact points can be produced.
A robot gripper developed with elastic components (chassis, actuators, joints and fingers), can adapt easier to the irregular shapes of food products, produces a softer contact, increases the contact area between fingers and product, increases the reliability, and reduces hard contacts points. The use of AM process with polyamide and the lack of geometrical restrictions of this technology make easier to achieve these features. Pneumatic actuators, components, joints and fingers can be designed to be flexible during gripper grasping process. Gripper designs can be simplified as all the gripper components can be manufactured quickly in a single part and gripper reduces its total weight. AM pneumatic actuator displacement is short due to elastic properties of polyamide. For food handling in most cases, AM pneumatic actuators cannot achieve by themselves the necessary finger gripper stroke, motion and force. They need a mechanism to achieve these requirements. The join of AM actuators with gripper mechanisms can have misalignments and displacements. Gripper fingers can be designed to be elastic and with shapes similar to the food. They can deform during grasping process. These features increase the contact area and reduce the pressure against the product. Mechanical joints developed in plastic with AM work inside its elastic limit. If the mechanism joints are not rigid and their deformations are under control, gripper has a compliant motion that will adapt to the products. Food shapes are irregular and grippers can adapt to them. With AM joints are integrated in a single part reducing the number of components.
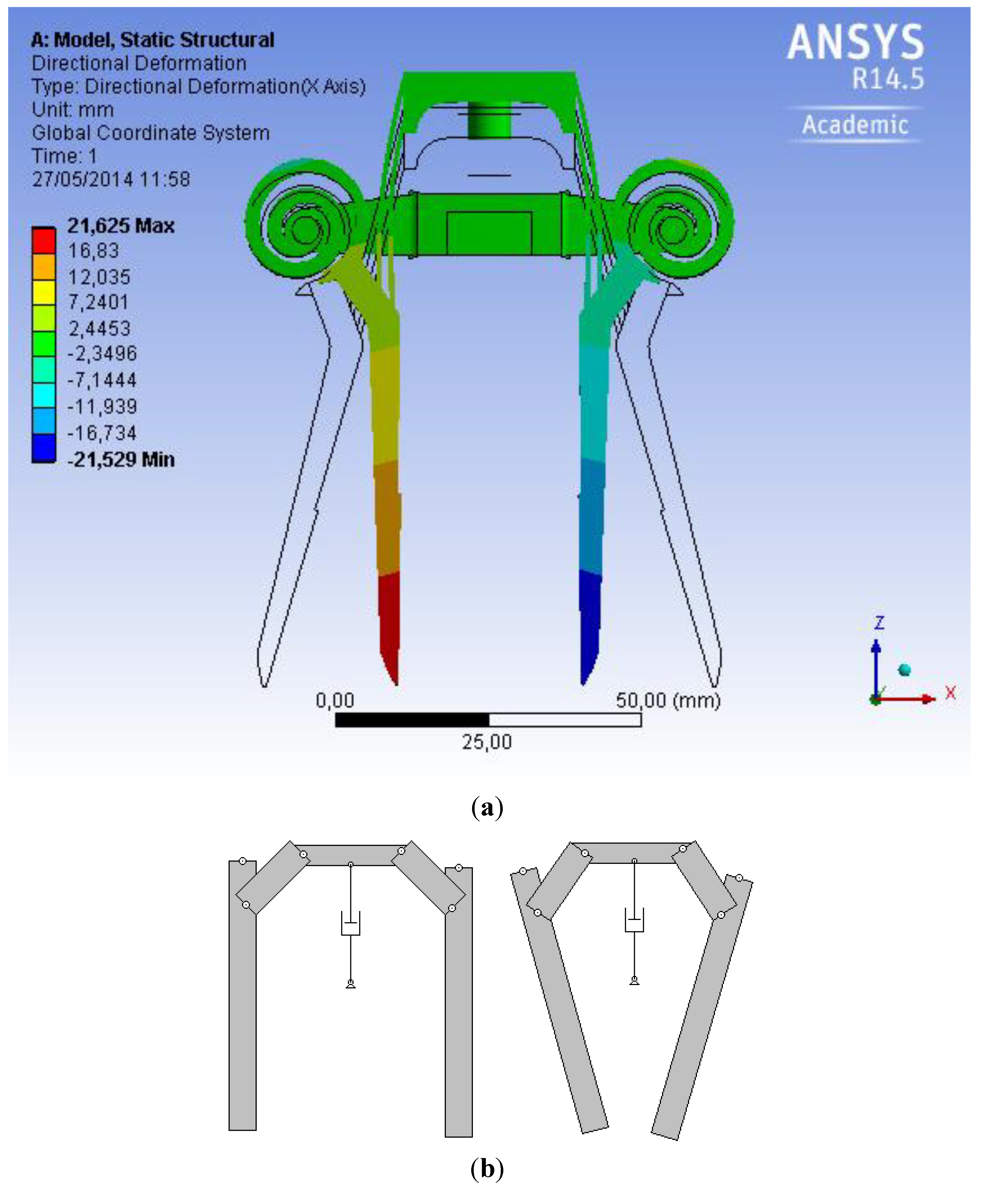
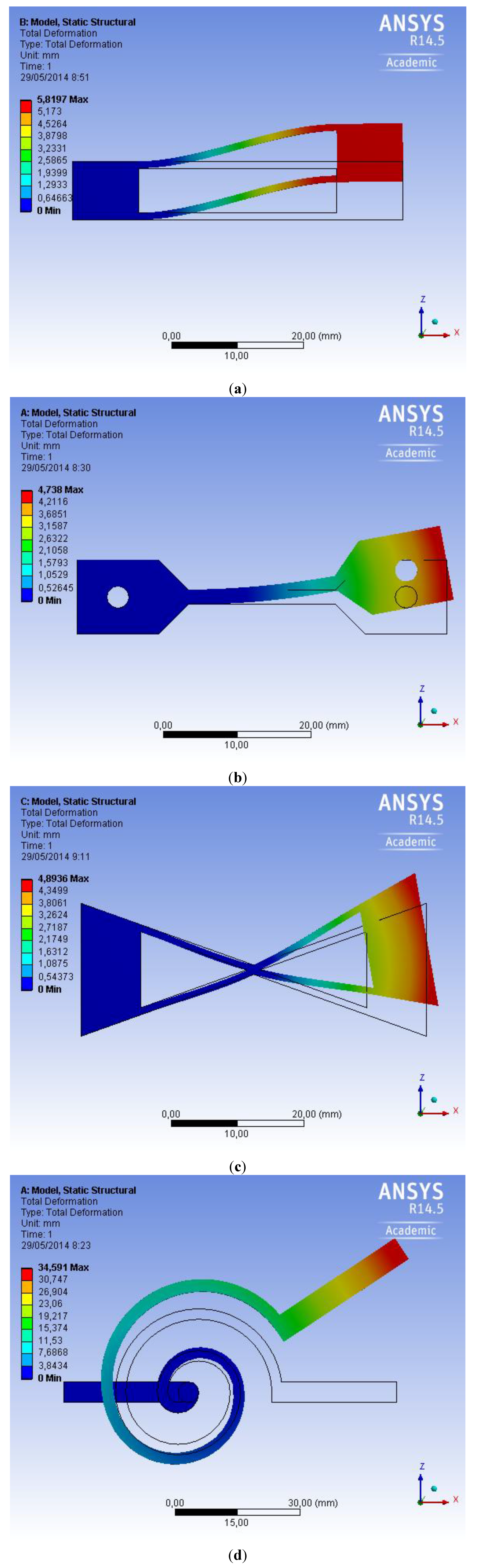
Figure 6a shows an angular robot gripper where the main finger shaft is replaced with spirals and the transmission bars between cylinder rod and finger are replaced by two parallel and deformable thin bars. This gripper is actuated by a double acting standard pneumatic cylinder SMC CUJB-10-10D. Fingers are elastically joined to the chassis, facilitating the adaptation to the product shape during grasping action.
Figure 6b is the equivalent mechanism designed with rigid bodies and shafts. It needs six axes and at least five rigid bodies: chassis, two intermediate transmission bars and two fingers. In this case, fingers are elastically joined with cylinder rod and chassis.
Figure 6.
(a) Angular gripper mechanism, fingers and chassis all made in a single plastic piece, without shafts and actuated with a double effect pneumatic cylinder. (b) Equivalent gripper designed with rigid bodies.
Figure 6.
(a) Angular gripper mechanism, fingers and chassis all made in a single plastic piece, without shafts and actuated with a double effect pneumatic cylinder. (b) Equivalent gripper designed with rigid bodies.
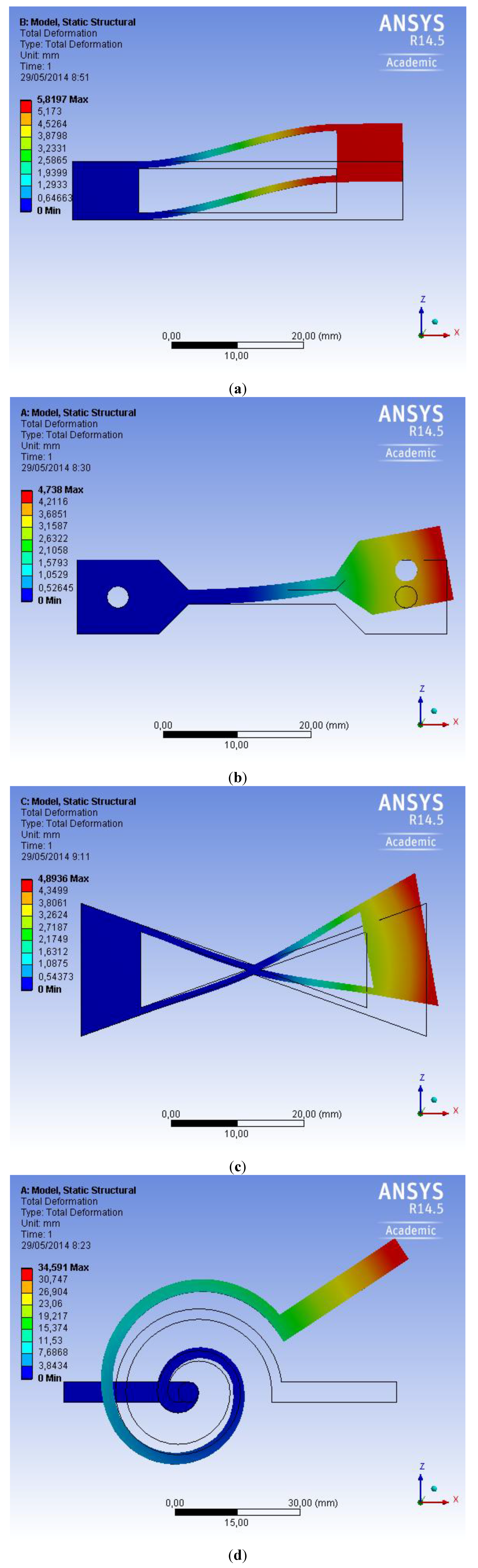
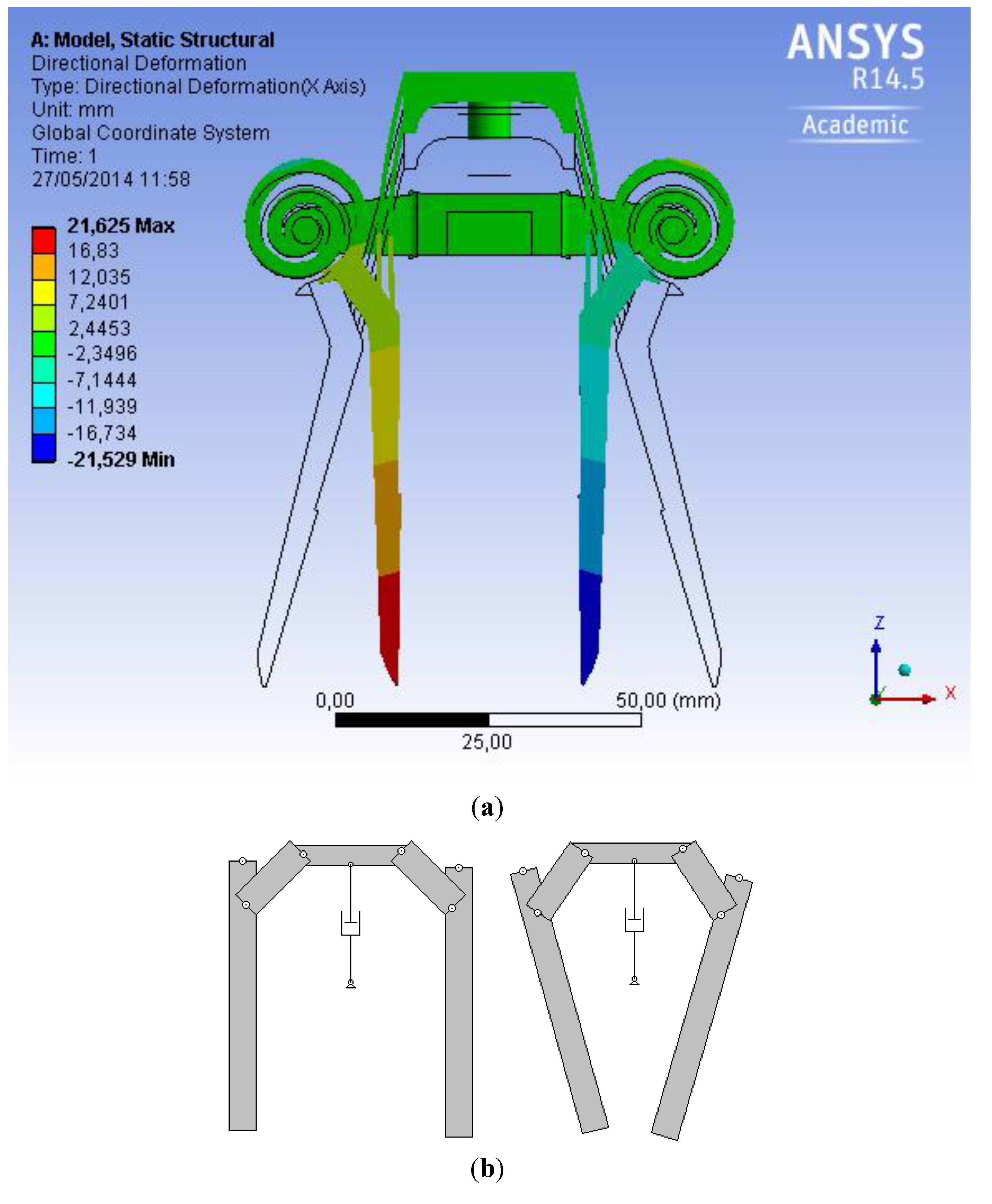
Figure 7a shows a complete gripper developed in a single plastic piece with two AM pneumatic actuators. The equivalent gripper needs a chassis, two connector bars, two fingers and four shafts for each finger (
Figure 7b). This gripper is very light, simple and compact because all is contained in a single plastic part. No intermediate bars are needed to connect pneumatic actuator with the fingers, reducing the gripper length, in the direction of the actuator motion, and obtaining a more compact gripper. Two deformable bars connect actuator with finger, each one from different positions of the actuator. With this configuration the fingers move parallel and angular at the same time. The AM actuator motion is linear but it also moves vertically and rotates to follow the motion of the mechanism.
Figure 7.
(a) A complete gripper made in a single piece of polyamide. Pneumatic actuators are bellows at 0.4 MPa and shafts are replaced by deformable bars. (b) Equivalent design with rigid bodies.
Figure 7.
(a) A complete gripper made in a single piece of polyamide. Pneumatic actuators are bellows at 0.4 MPa and shafts are replaced by deformable bars. (b) Equivalent design with rigid bodies.
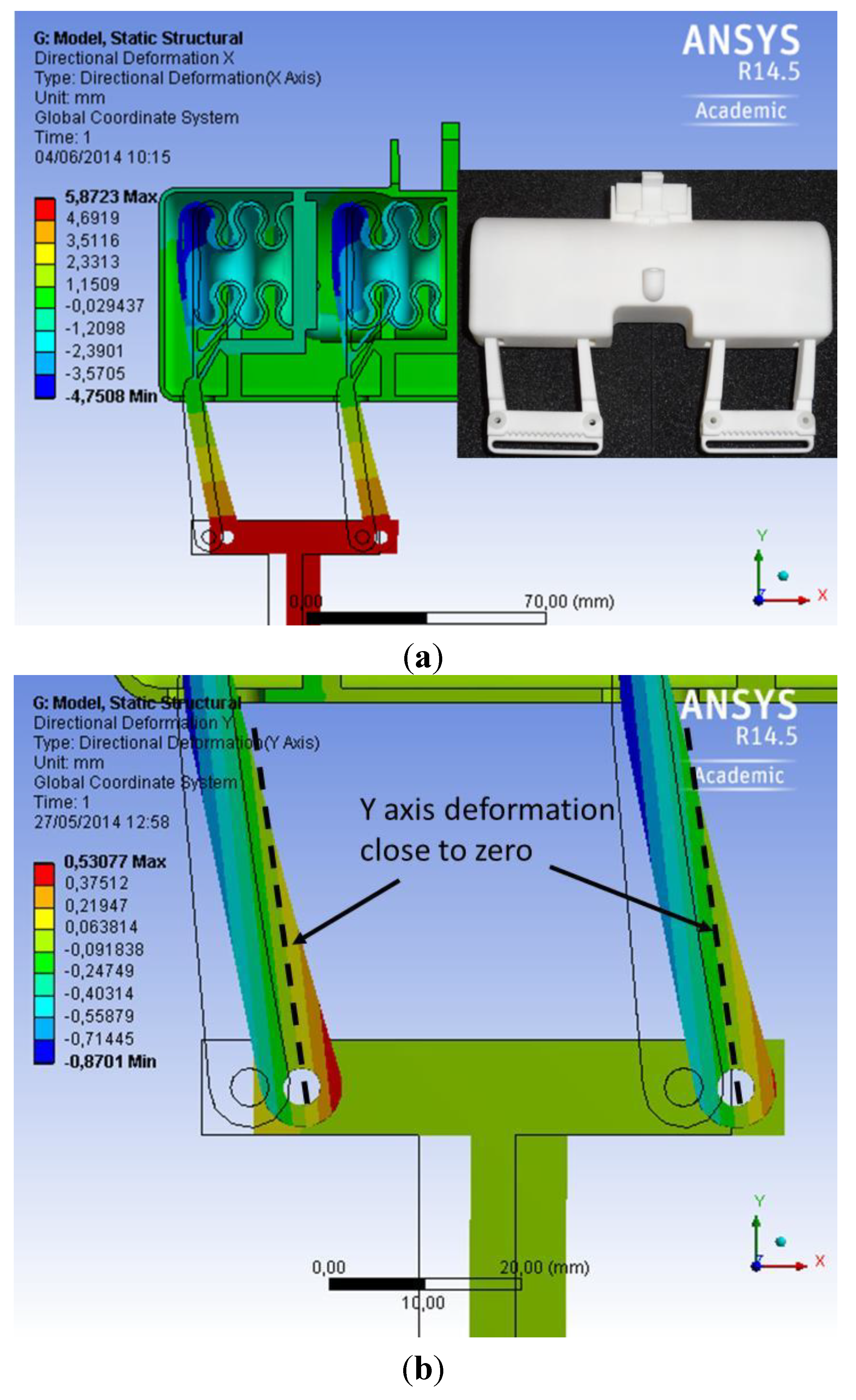
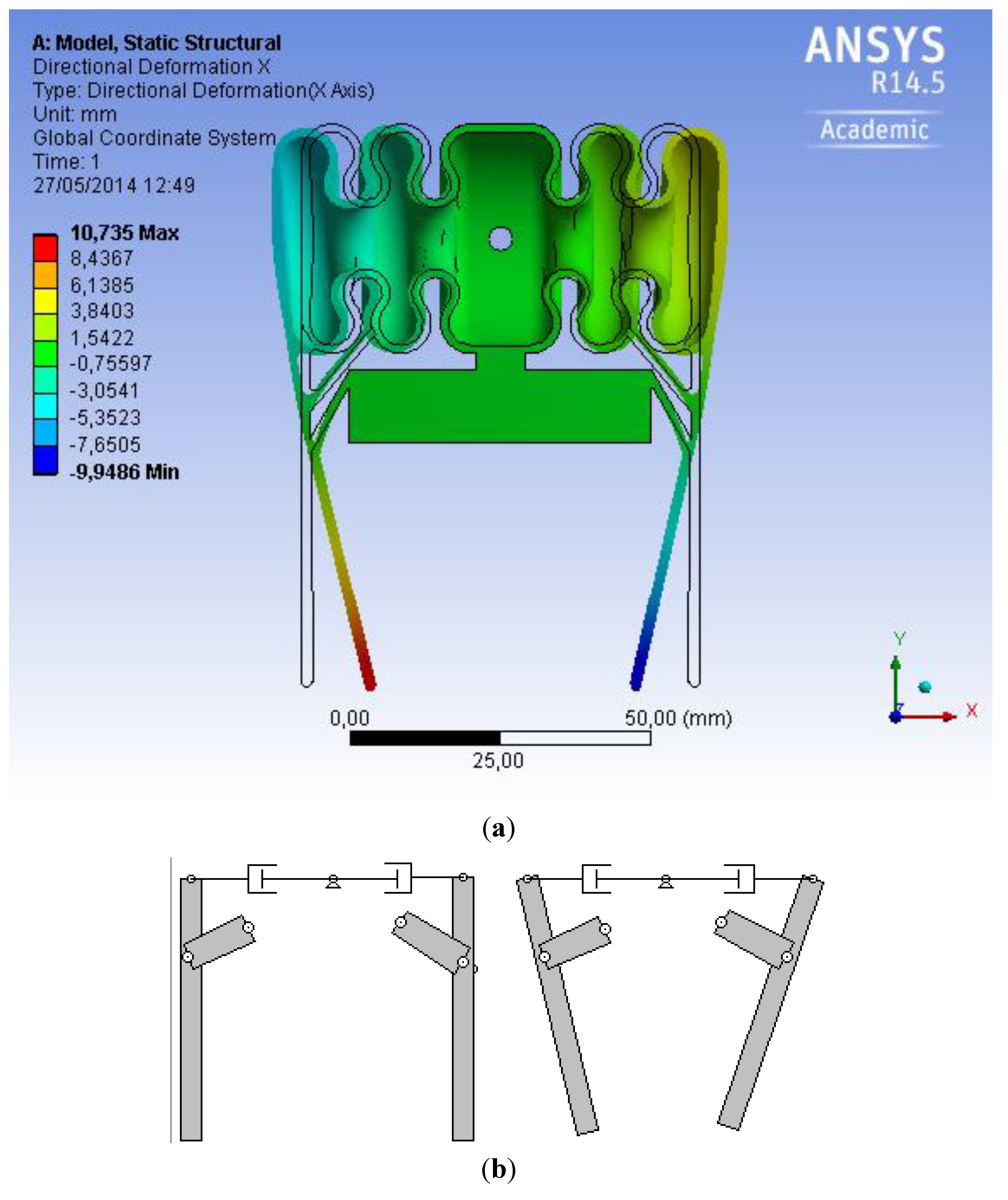
From the analysis of the vertical motion of the fingers of the gripper in
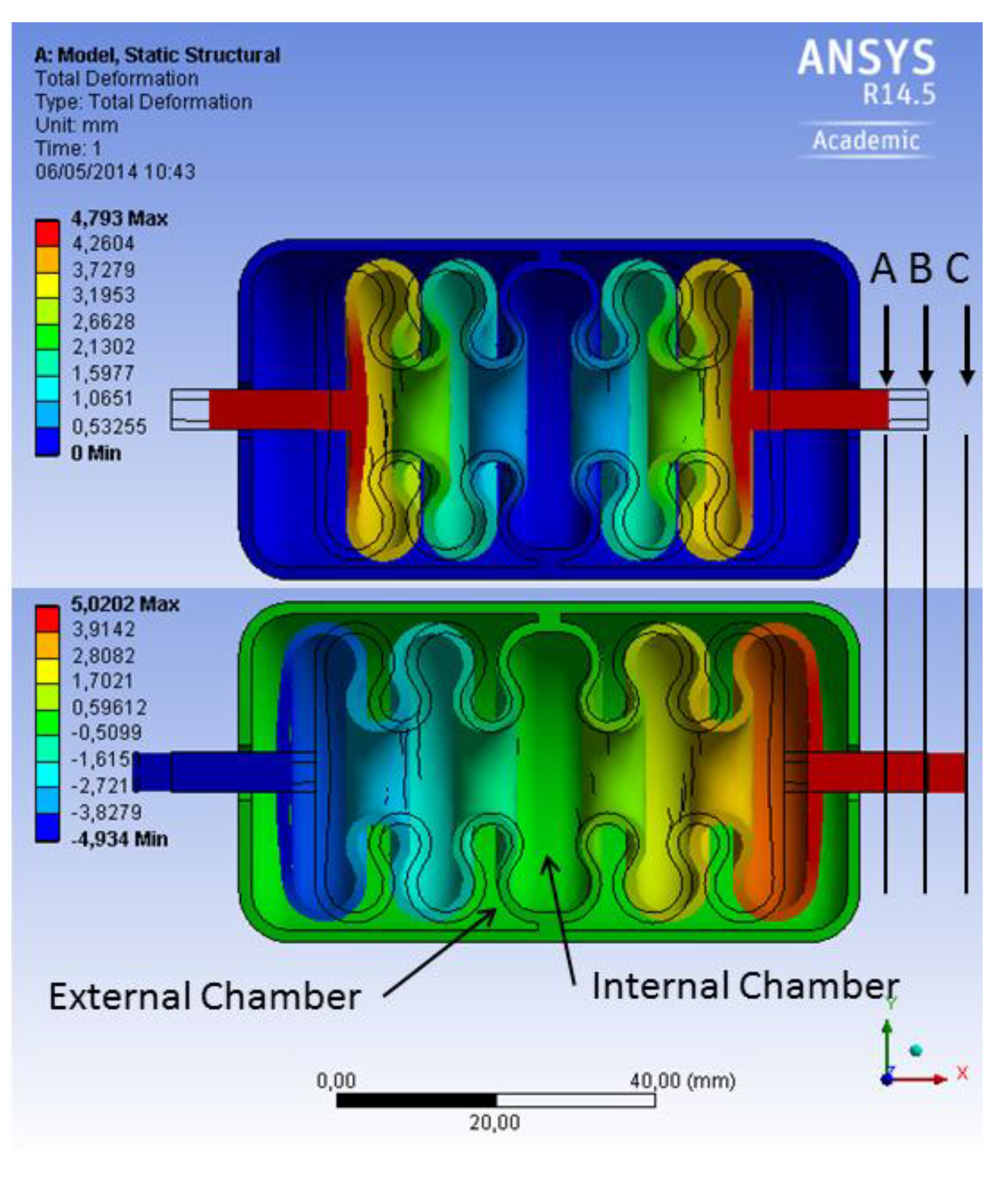
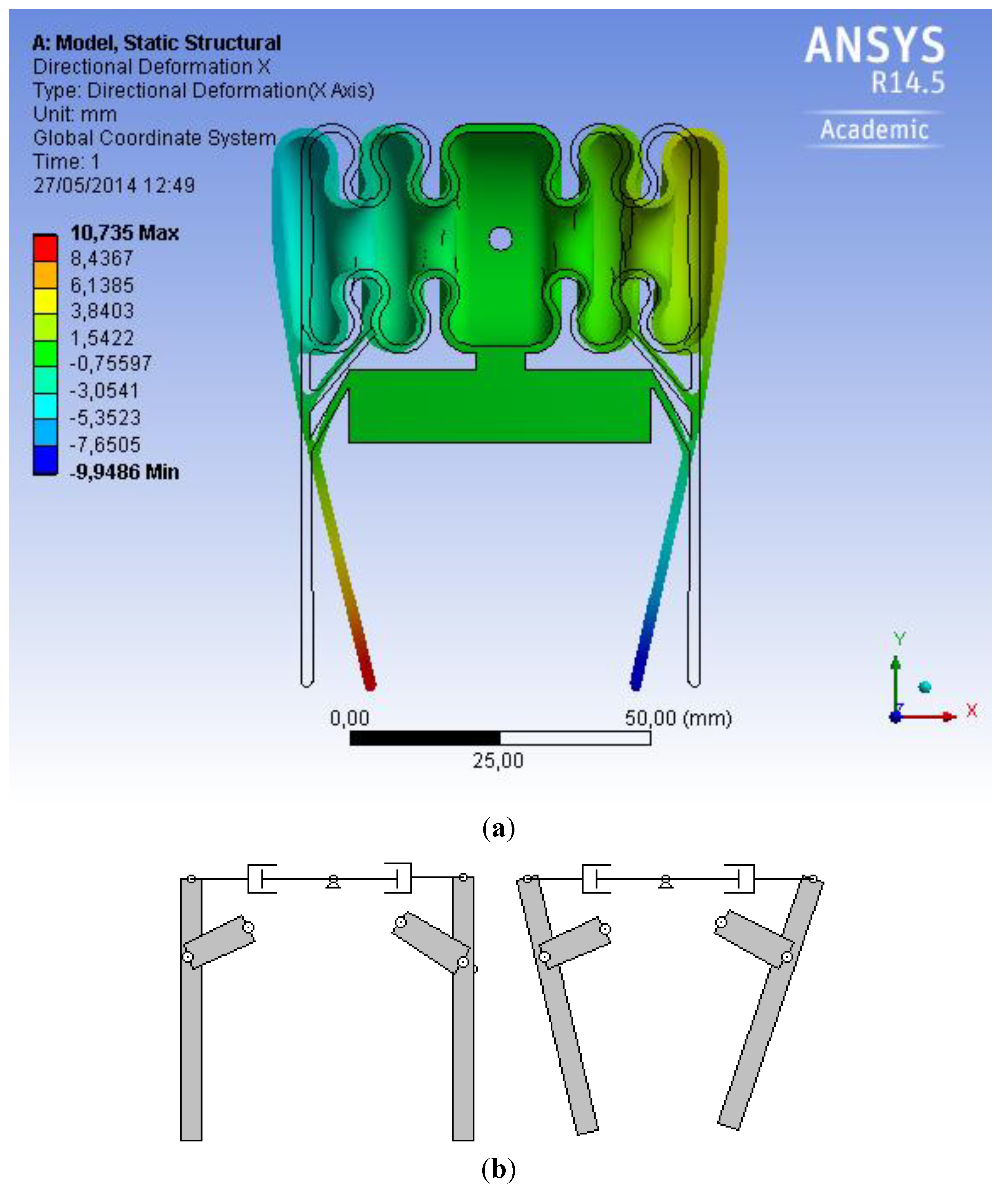
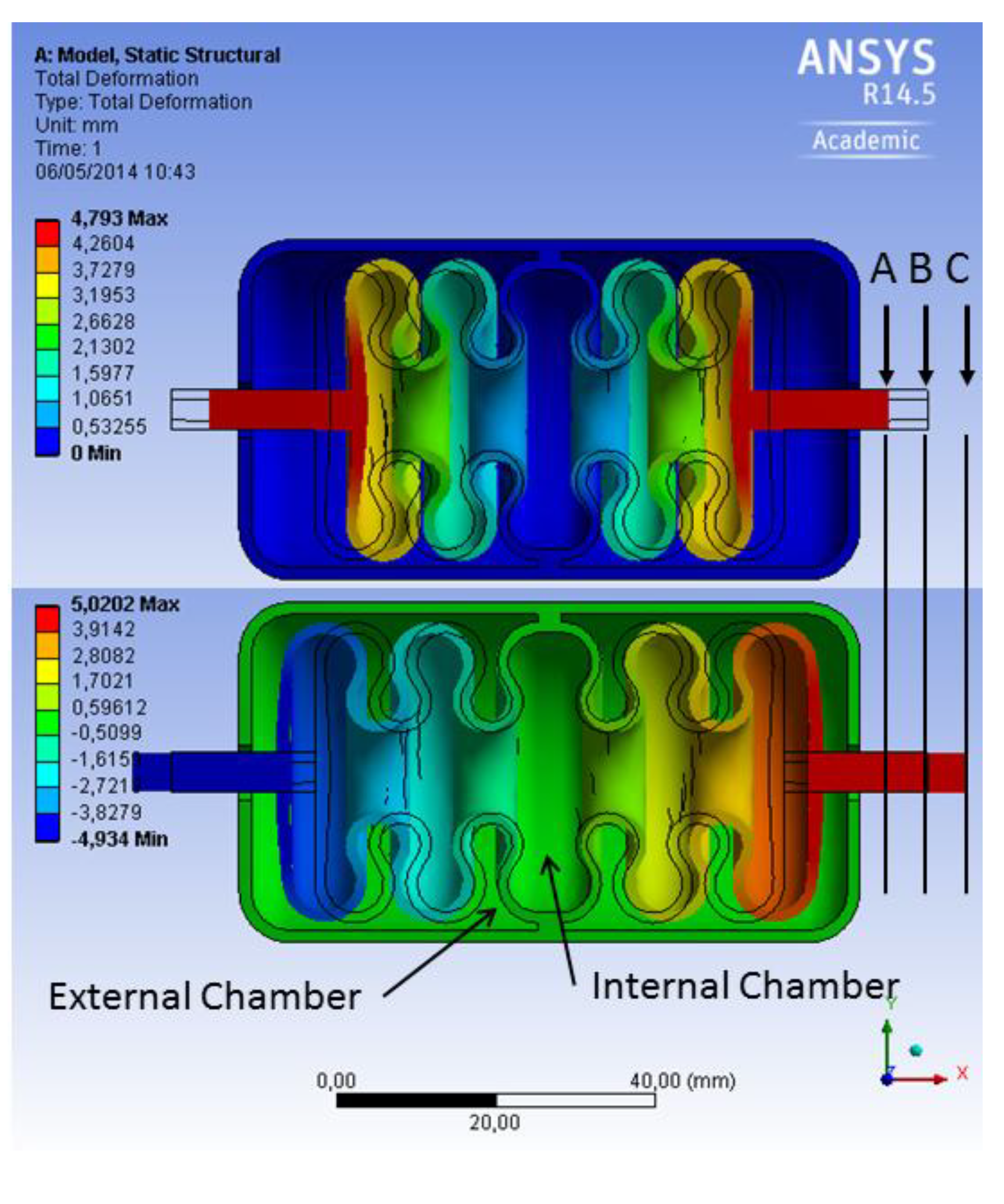
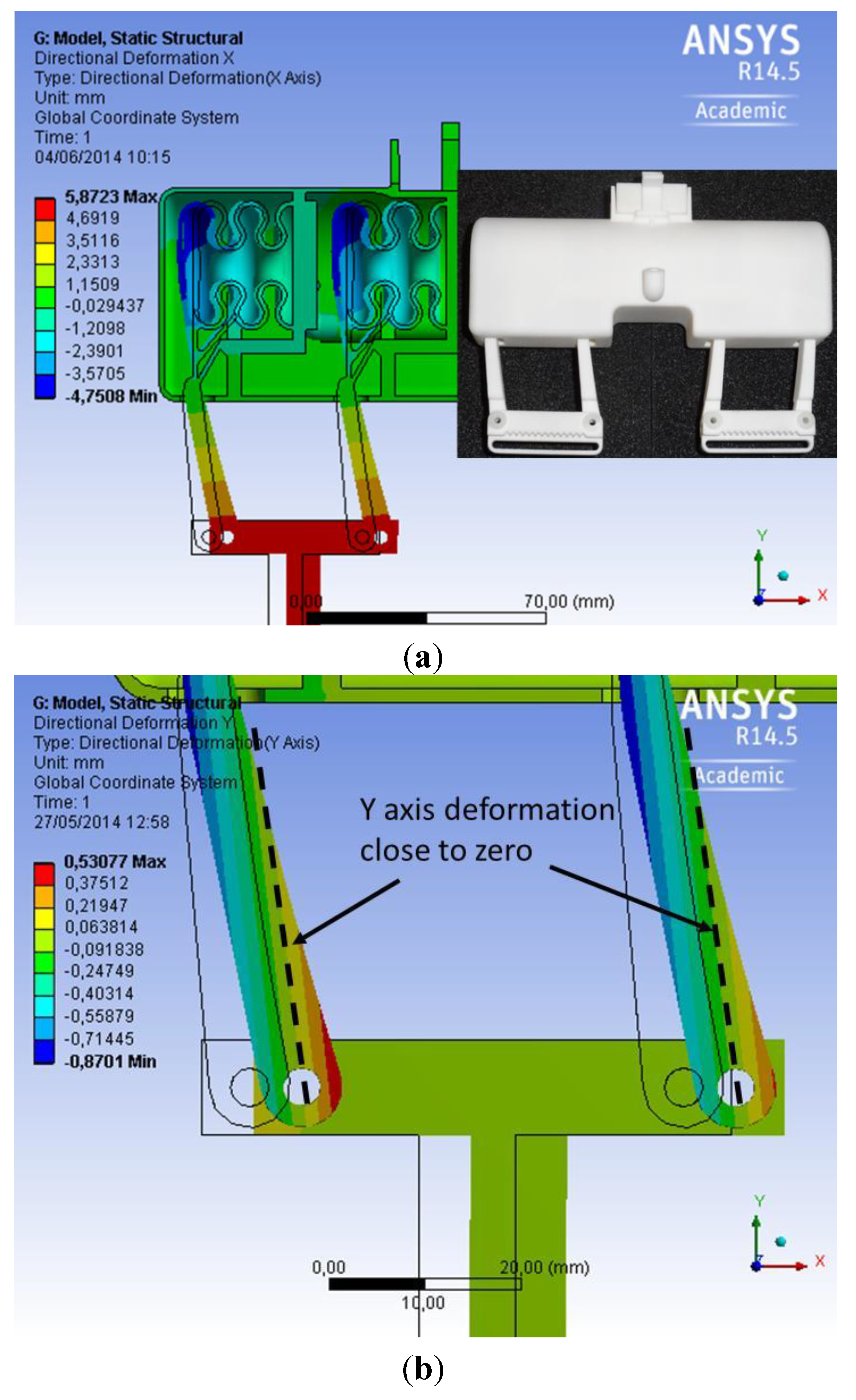
Figure 7a, it is noted that there are areas where vertical motion is close to zero. Tacking advantage of this feature a new gripper is developed with two internal chambers per finger (
Figure 8a). The
Figure 8b is the directional deformation of the Y axis of this gripper. The dotted line is formed by points with close to zero deformations in the Y axis direction. No point in this line will move vertically. This feature can be used to introduce shafts with centers located in this line so that these shafts move parallel to X axis. The positions of the shafts are experimentally defined by the analysis of a FEM model.
Figure 8b shows the parallel motion of one finger of this gripper. This gripper needs at least three plastic parts and four shafts. Therefore, this design increases the size of the gripper and the number of components.
Figure 8.
(a) The gripper, with two internal chambers per finger and analysis of the horizontal displacement of one finger at 0.4 MPa. (b) Analysis of the vertical displacement. The dotted line represents points where shaft centers can be located to get only horizontal motion in finger.
Figure 8.
(a) The gripper, with two internal chambers per finger and analysis of the horizontal displacement of one finger at 0.4 MPa. (b) Analysis of the vertical displacement. The dotted line represents points where shaft centers can be located to get only horizontal motion in finger.
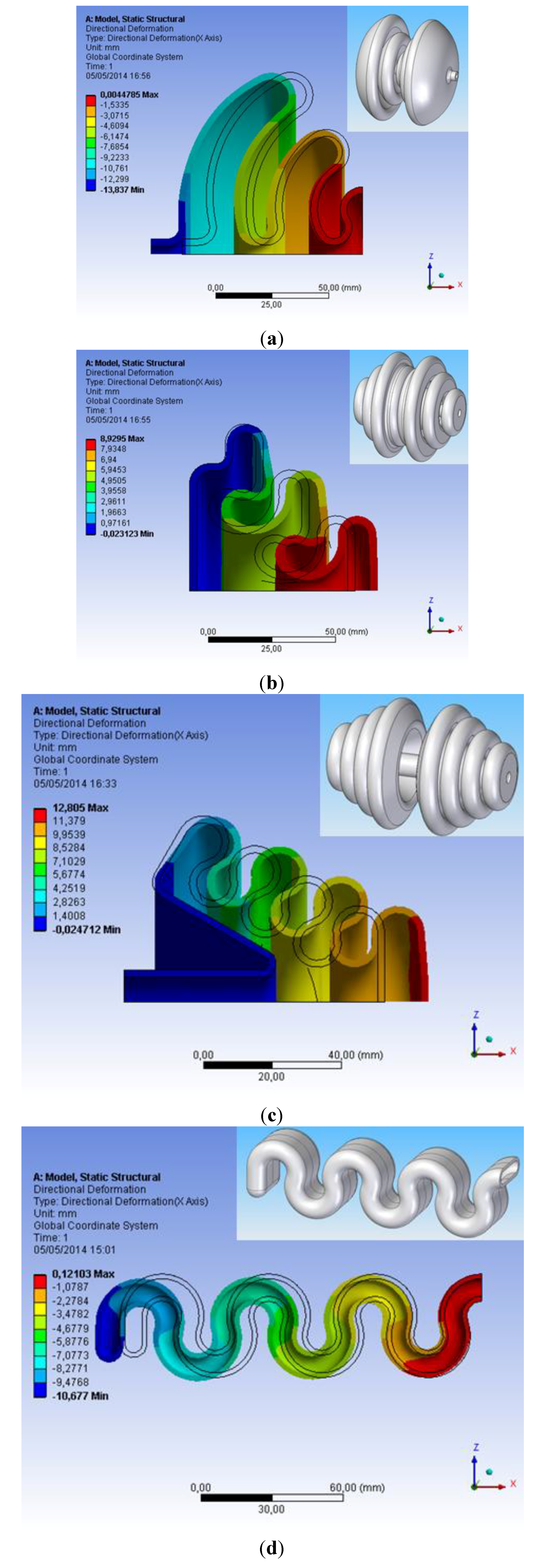
To achieve a fast pneumatic AM, the actuator is necessary to reduce the volume of the chamber. Small chambers have small motion and to use them as actuators for grippers is necessary a mechanism to achieve enough motion of the fingers.
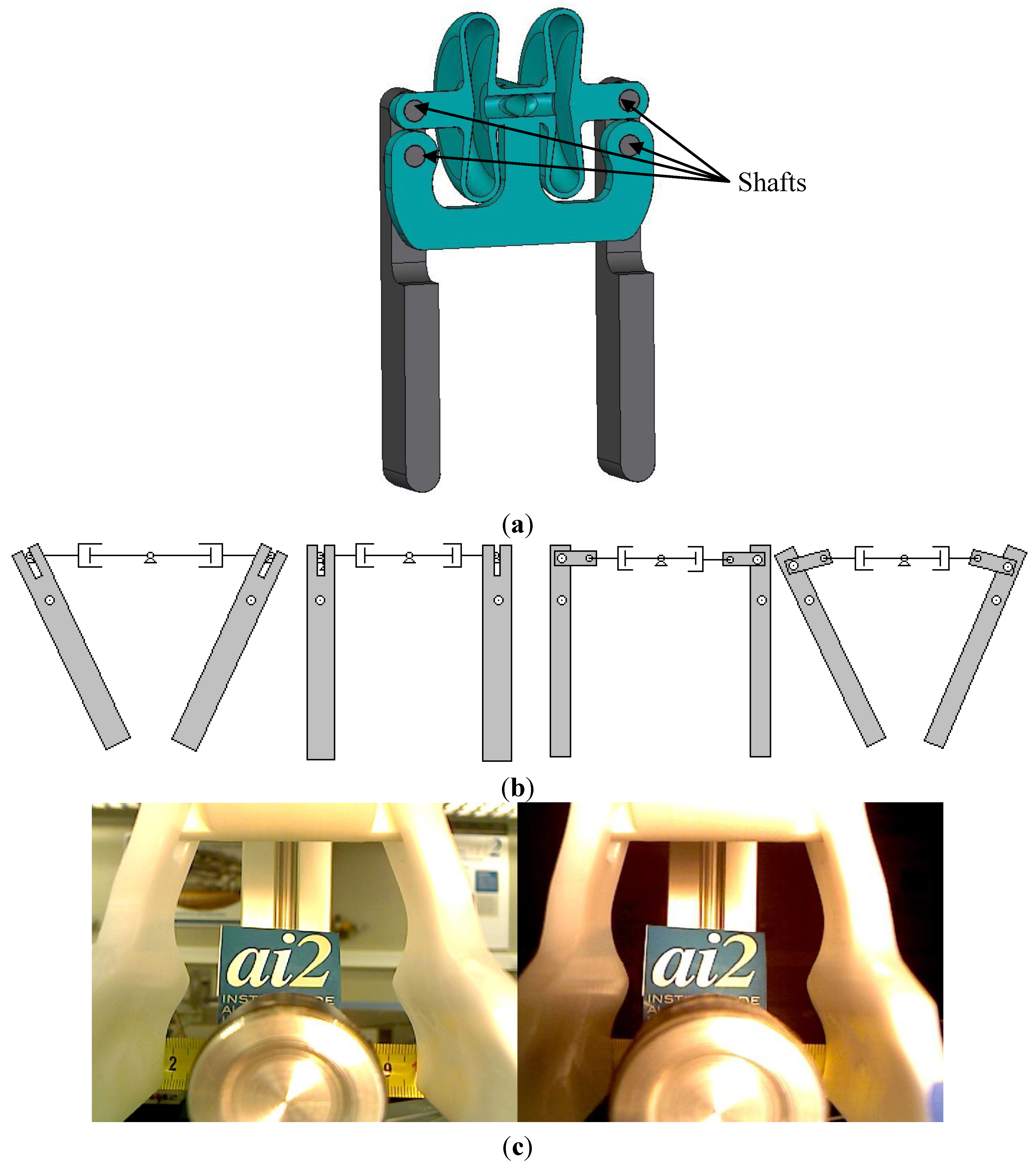
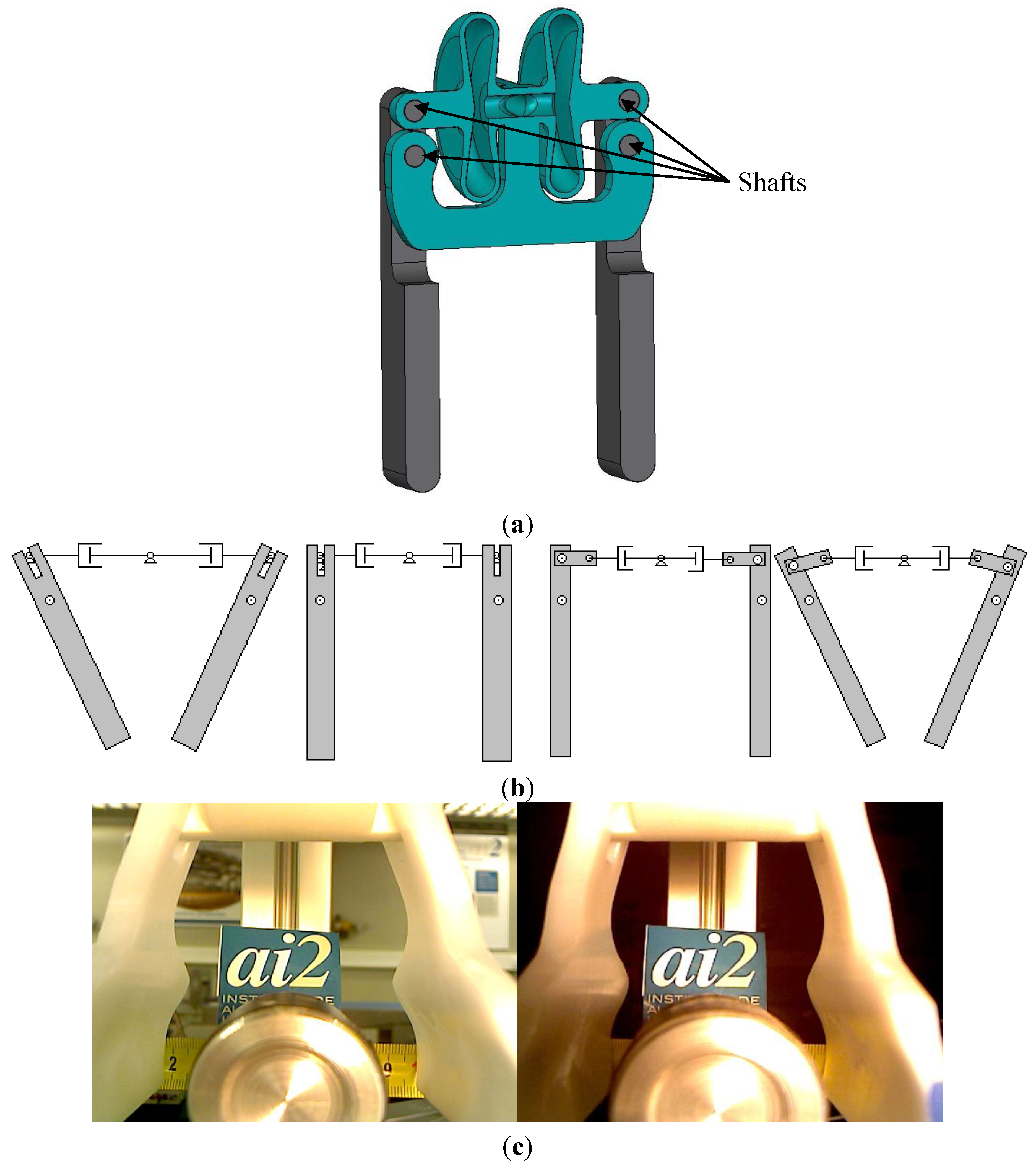
Figure 9 has two small AM pneumatic actuators with only one lobe. Every finger is moved by one pneumatic AM actuator. The fingers are rigid and they are joined to the gripper and chassis with two shafts per finger (shafts in
Figure 9a). An equivalent gripper mechanism can be solved with multi-body rigid mechanism (
Figure 9b) with two simple effect pneumatic standard cylinders, joined to the fingers with sliders or intermediate bars (these elements are necessary because fingers rotate around Shafts and a small vertical displacement happened). With AM actuators the length of the gripper decreases and grippers can be designed for the requested force by modifying the dimensions of the pneumatic chambers.
Figure 9c shows the result of a fatigue test of the gripper represented in the
Figure 9a. With 0 cycles gripper opens 81 mm and after 20,000 cycles it only opens 69 mm.
Figure 9.
(a) A gripper mechanism with AM pneumatic actuators. (b) 2 different possibilities of equivalent designs with standard simple effect pneumatic cylinders. (c) Fatigue test with 0 cycles and after 20,000 cycles.
Figure 9.
(a) A gripper mechanism with AM pneumatic actuators. (b) 2 different possibilities of equivalent designs with standard simple effect pneumatic cylinders. (c) Fatigue test with 0 cycles and after 20,000 cycles.
To design a multi-finger gripper with a multi-body rigid mechanism, it is necessary to reproduce the transmission mechanism for every finger. With multi-body rigid components, grippers increase significantly their complexity, weight, cost, number of components and weight. The design of the gripper should consider assembly difficulties and whether volume increases significantly. AM process has no geometrical restrictions to develop complex parts as far as thickness is higher than 0.6 mm for the current available AM machines. When a finger with its actuator is designed, it can be easily duplicated with CAD functions to design a multi-finger gripper in a single part. The production cost of the gripper with three fingers in
Figure 10 and the gripper with two fingers in
Figure 8 are both around 100 euros. Multi-finger grippers are easier to design and produce with AM process.
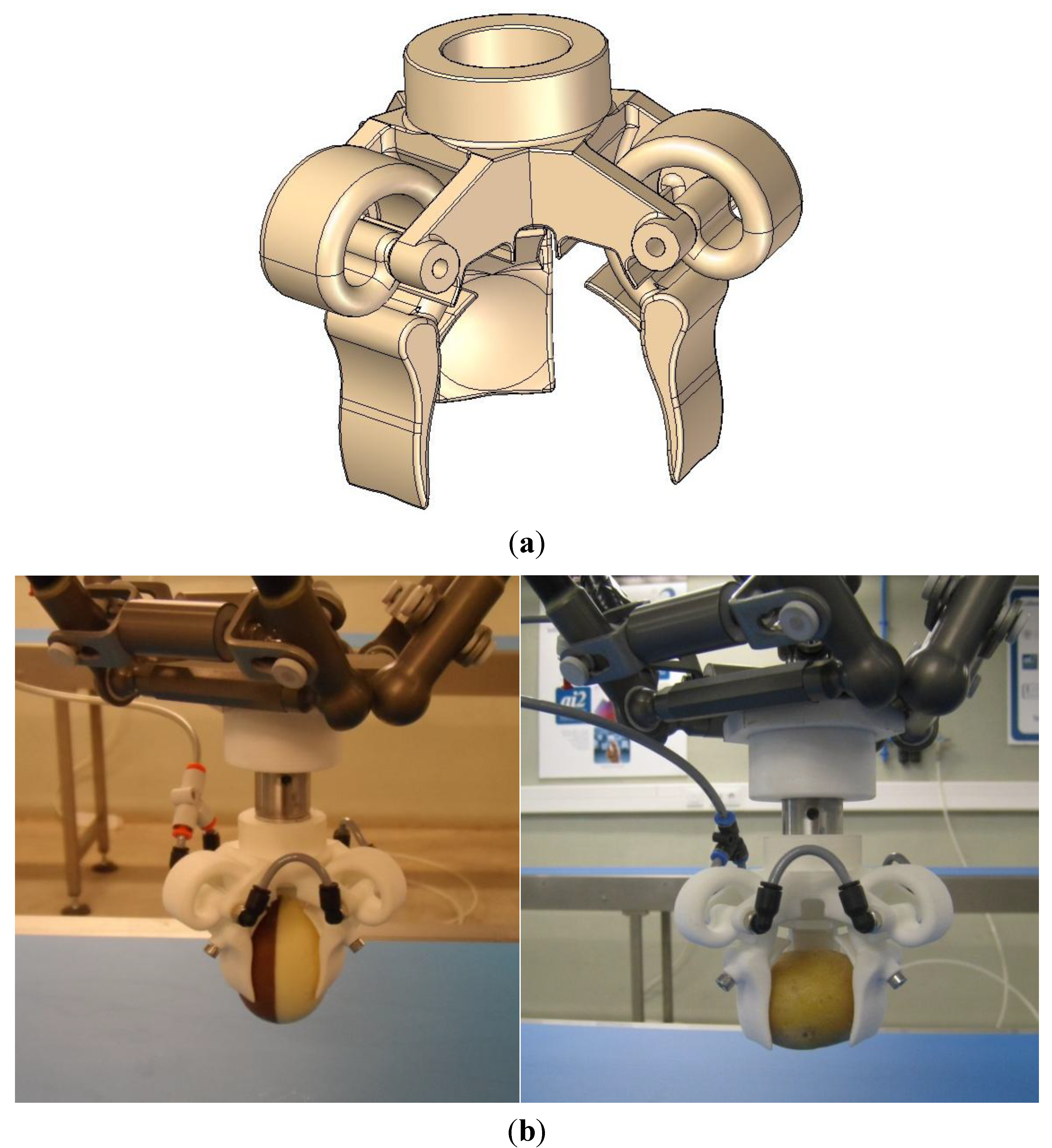
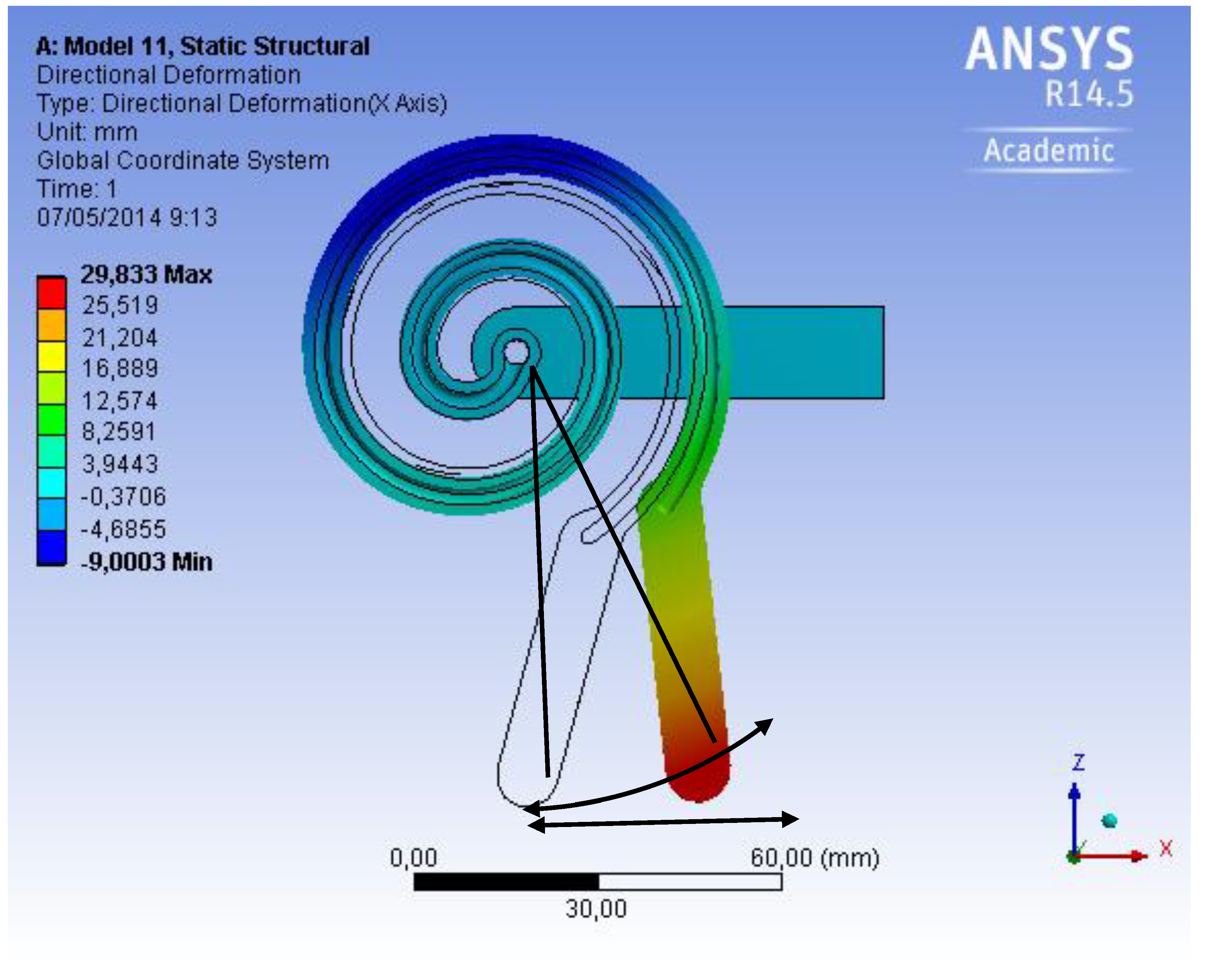
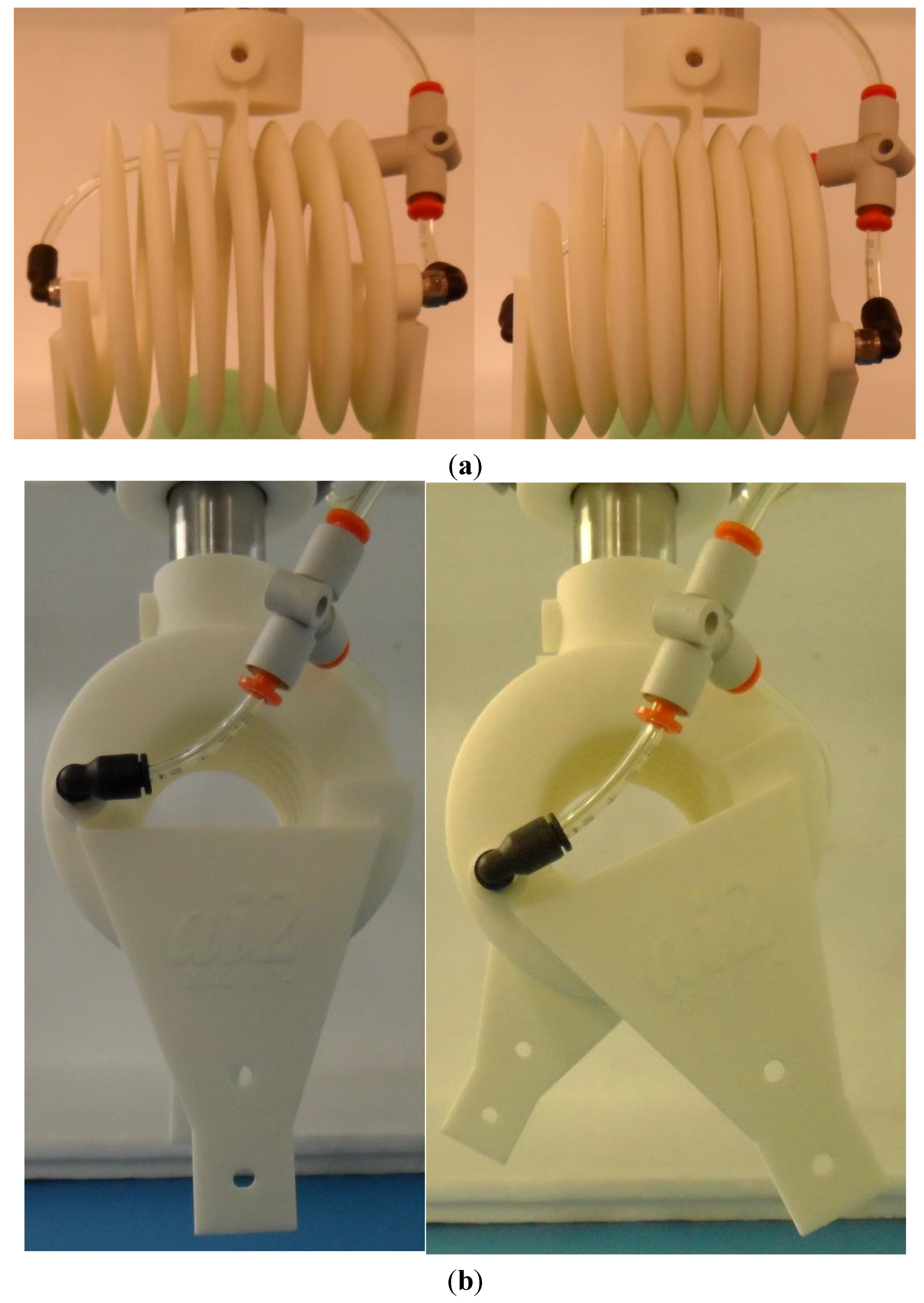
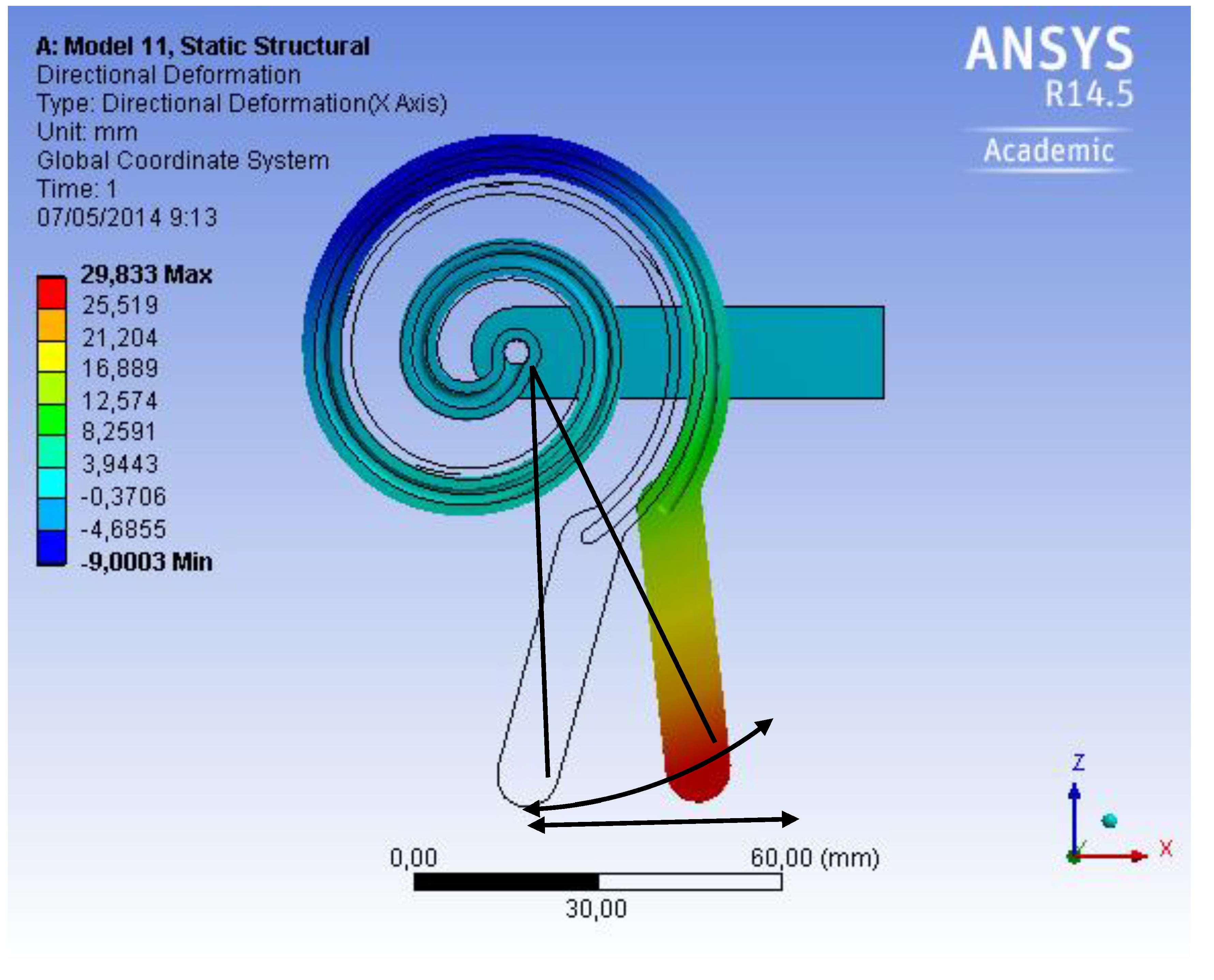
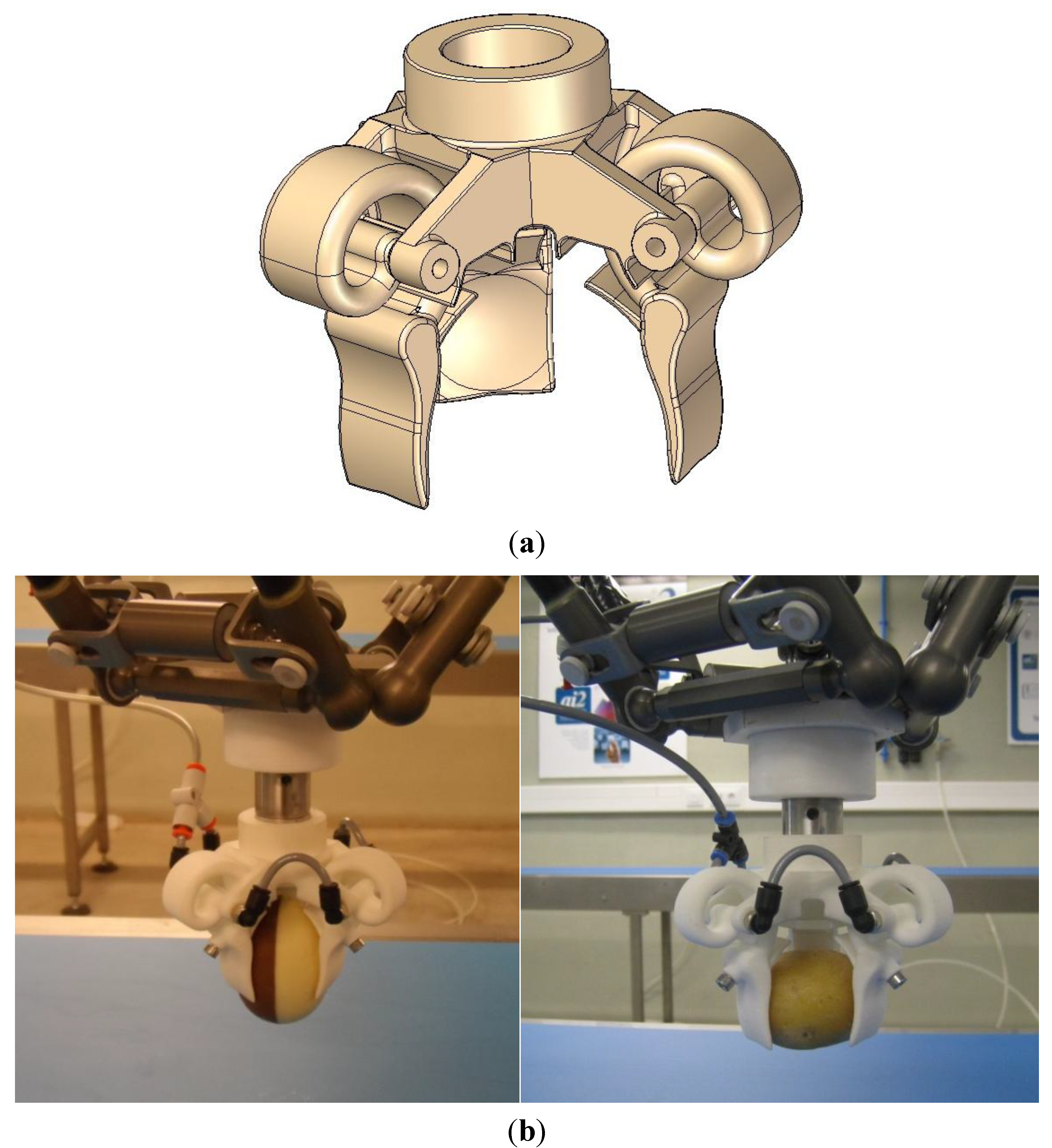
Figure 10 is a concentric gripper with three fingers. A hollow chamber with spiral shape achieves the necessary finger motion. This gripper can be used for handling spherical products like chocolate eggs and has also been tested with horticulture products like mandarin oranges or potatoes (
Figure 10b).
Figure 10.
(a) Concentric gripper with three fingers designed and manufactured with AM process. (b) The gripper grasping a chocolate egg and a small potato.
Figure 10.
(a) Concentric gripper with three fingers designed and manufactured with AM process. (b) The gripper grasping a chocolate egg and a small potato.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}