Use of Bathymetric and LiDAR Data in Generating Digital Elevation Model over the Lower Athabasca River Watershed in Alberta, Canada



Abstract
:1. Introduction
- Schwendel et al. [8] investigated different interpolation methods for generating the digital elevation model (DEM) in four upland rivers in the Ruahine and Tararua Ranges over the southern part of New Zealand’s north island. The study used triangulation with linear interpolation, natural neighbours, point and universal kriging, multi-quadratic radial basis function, modified Shepard’s method, and inverse distance weighting (IDW) for four rivers reaches. The generated DEM using triangulation with linear interpolation ranked the best among all the methods used in the study (i.e., mean absolute error in the range of −0.01 to +0.003 m) while compared with the measured data.
- The single-beam echo sounder and GPS-based river bathymetry data were used by Merwade [15] at six rivers reaches (i.e., Brazos, King Ranch, Rainwater, Sulphur located in Texas, and Kentucky and Ohio located in Kentucky) in the USA. Seven interpolation techniques were investigated (i.e., IDW, regularized spline, spline with tension, topo grid, natural neighbour, ordinary kriging (OK), and OK with anisotropy) using both with- and without-moving the trends. Four bathymetric surfaces were created using all seven methods (i.e., in total of 28 × 6 reaches). OK with anisotropy was found as the best, i.e., root mean square error (RMSE) values in the range of 0.2–1.0 m in all six reaches, compared with the validation datasets.
- Kardos [16] used river cross sectional survey data (i.e., acoustic Doppler current profiler (ADCP)) to generate the bathymetric surfaces over the Paks-Mohács reach of Danube River in Hungary. The proposed method was comprised of the following steps: (a) cross-sectional data were orthogonally projected to a straight line keeping original z-value; (b) the straight line was divided into equal segments and z-value was computed using neighbourhood points; (c) an equidistance mesh was created between two cross-sections, and z-value was computed from surrounding four points; and (d) finally compared with the “topo to raster” and “natural neighbour” methods using full and partial datasets (i.e., considering every fifth cross-section data). The deviation between two surfaces (i.e., full and partial datasets) were found to be within ±1.0 m in case of low flow conditions, whereas it was found to have very limited usage in case of high-flow condition riverbeds.
- Fonstad and Marcus [17] utilized local river gauge data (i.e., discharge), image brightness value (i.e., digital aerial photograph), and manning’s roughness to calculate the river bathymetric information (i.e., water depth) over the Brazos River, Texas and Lamar River, Wyoming. Two models were developed based on channel shape approximation and Beer-Lambert approximation. The average water depth was calculated as a function of discharge, river width, and slope values; and correlated with the image brightness [i.e., blue digital number (DN) values correlated well (r2 value of 0.76)]. The estimated water depth and measured depth were well correlated (i.e., r2 value 0.51 and 0.77, respectively, for the Brazos River; and r2 value 0.46 and 0.26, respectively, for the Lamar River).
- The bathymetric information of Lake Vrana in Crotia was steered using an integrated measuring system, i.e., single beam SONAR data equipped with GPS, rover GPS, and dual frequency probe [18]. The coordinates and depth information were processed and further used to develop the continuous surfaces using 15 different interpolation methods (i.e., IDW, local polynomial, radial basis function, completely regularized spline, spline with tension, multi-quadric function, inverse multi-quadratic, OK, simple kriging, universal kriging, disjunctive kriging, ordinary cokriging, simple cokriging, universal cokriging, and disjunctive cokriging). Among them, the ordinary cokriging method was found as the best (i.e., standard deviation was less than 0.24 m).
- Glenn et al. [19] investigated the effect of transect location, spacing, and interpolation methods in generating the river bathymetric surfaces in the Snake River and Bear Valley Creak in Idaho. High resolution aerial photographs and multi-beam SONAR survey data were used for the Snake River, and experimental advance airborne research LiDAR (EAARL) data were used for Bear Valley Creek. Four interpolation methods (i.e., Delaunay triangulation, simple linear and OK using curvilinear coordinates, and Delaunay triangulation and NN using Cartesian coordinates) were investigated using different sets of transect locations (i.e., morphologically and equally spaced). The authors found that the accuracy of the DEM was not a function of transect location or interpolation method, rather the coordinate system of the interpolation and spacing between transects.
- Panhalkar and Jarag [20] used the surveyed cross-section data gathered by total station and differential GPS (DGPS) along a reach of 50 km over the Panchganga River in India. The IDW, Kriging and topo to raster methods were investigated to generate the river bathymetric surfaces. The authors observed that the IDW method performed better with a minimum standard RMS error of 0.776 m.
- Conner and Tonina [21] investigated the effect of cross section-based interpolated bathymetry on 2D hydrodynamic-model results over the simple and complex reaches of the Snake River and the Hells Canyon in Idaho, USA. The authors used high resolution multi-beam SONAR data in conjunction with remotely sensed data. Several grid surfaces were generated based on complete data sets, and equally spaced cross-sections (i.e., 0.5, 1, 2, 3, 4 and 6 times of average channel width). The surfaces were generated using the IDW method in a curvilinear gridding system. They suggested that using cross section spacing in between 0.5 and 1.0 times of average width captured channel-geometry and other river flow properties are similar to complete bathymetry.
- Hilldale and Raff [22] studied the river bathymetry in seven reaches of the Yakima and Naches Rivers (Yakima basin) in Washington, and one reach of the Trinity River in California, USA using airborne bathymetry LiDAR data. Universal kriging was used to generate the bathymetry surfaces and compared with the ground-based bathymetry data (i.e., collected using SONAR and bed elevations surveyed by wading). The authors used both point-based and grid-based comparison. The grid-based comparison showed a residual error (i.e., mean error) in the range of 0.15 to 0.29 m for the Yakima basin and 0.08 to 0.12 m for the Trinity River. The point-based comparison of the residuals also demonstrated similar results (i.e., 0.10 to 0.27 m and 0.12 to 0.18 m for the Yakima basin and Trinity River, respectively).
2. Materials
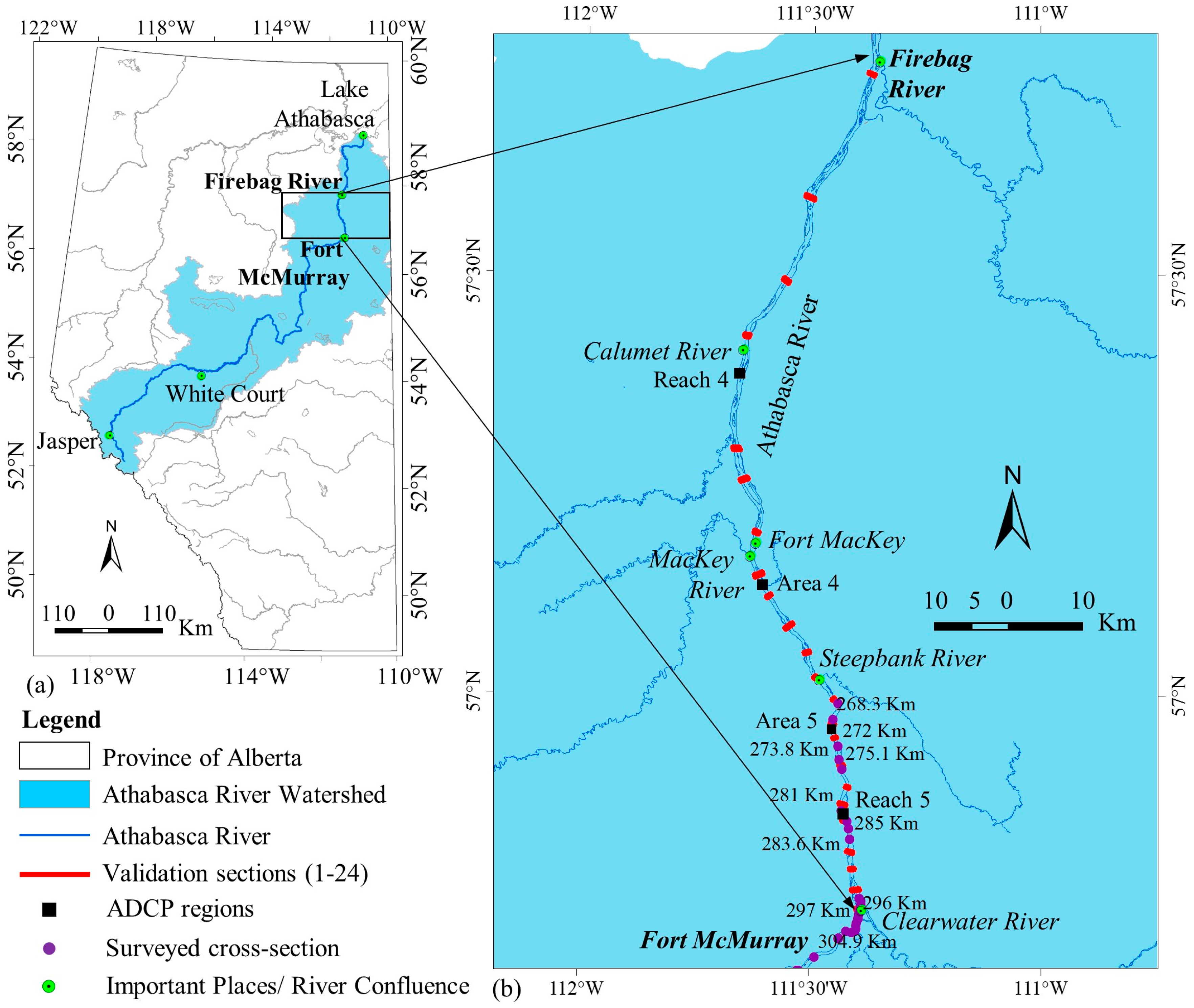
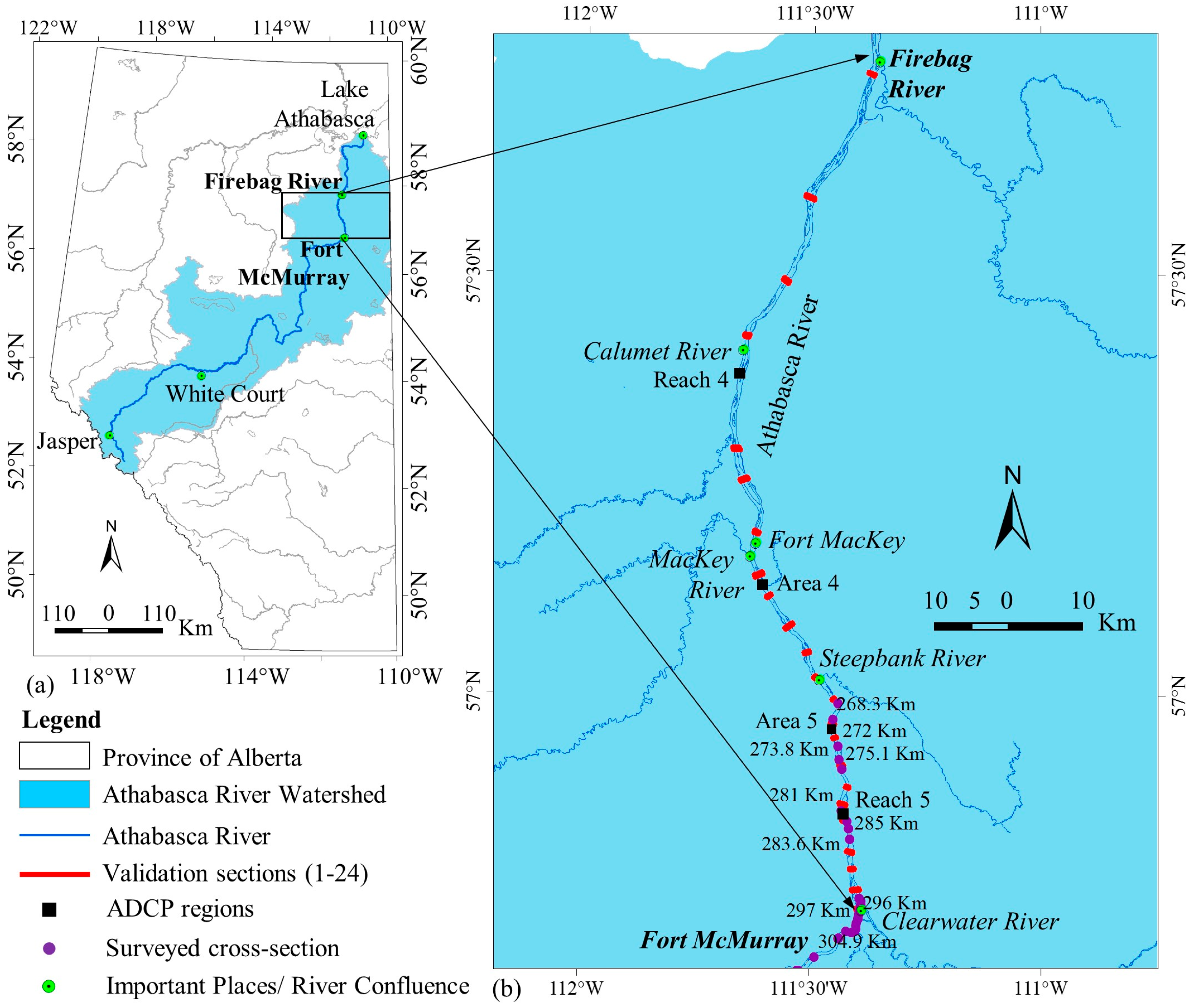
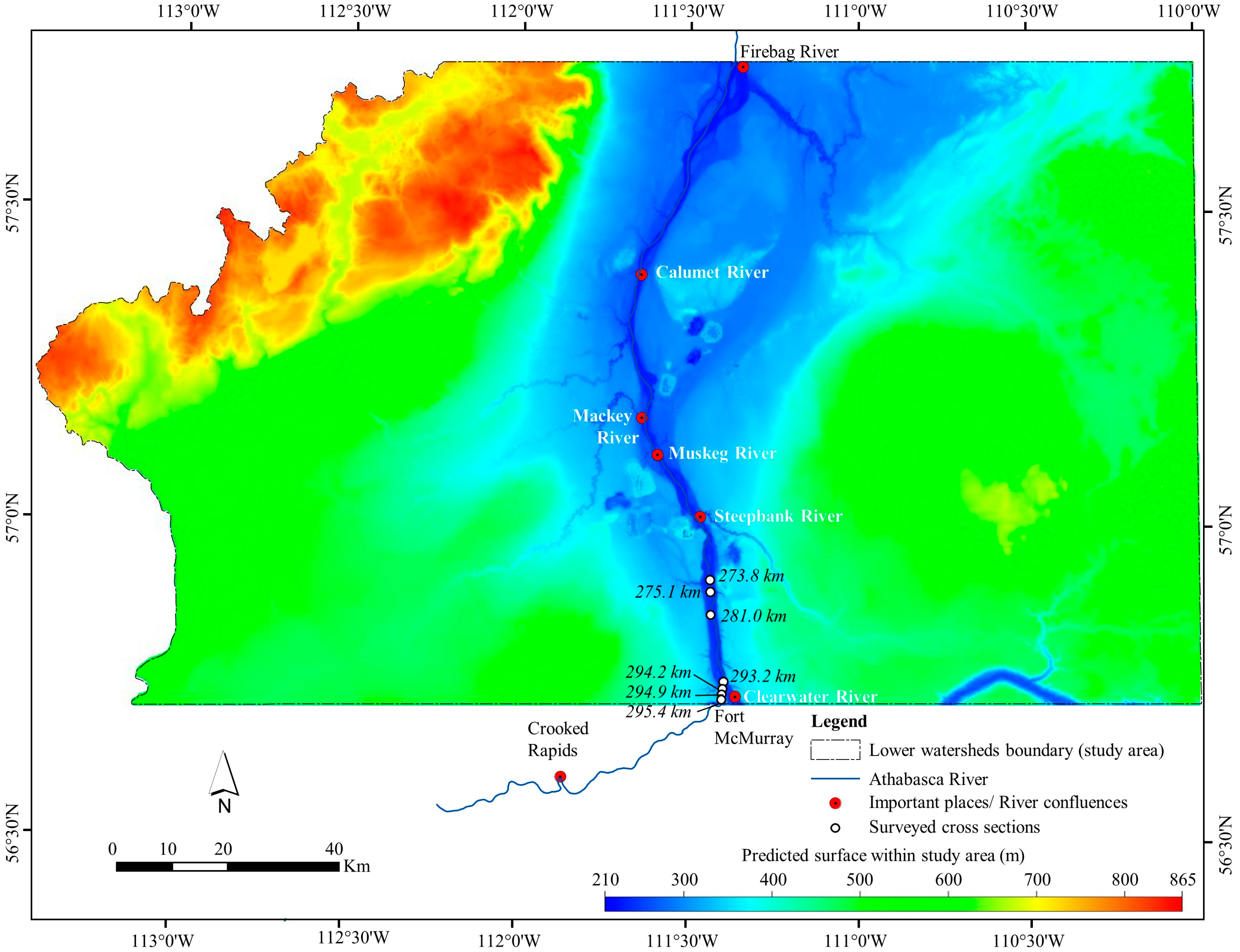
2.1. Description of the Study Area
2.2. Data Availability and Its Pre-Processing
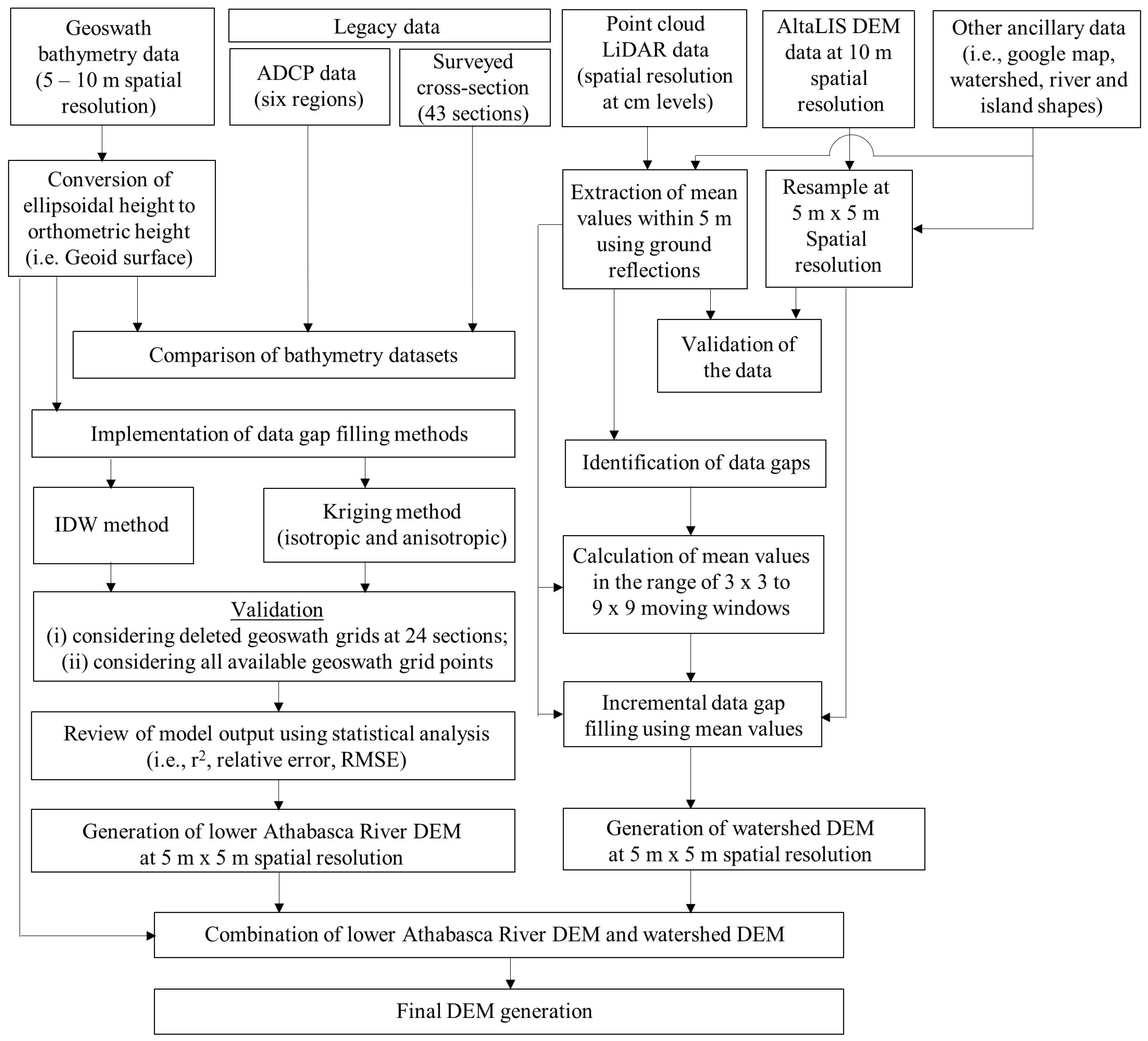
3. Methods
3.1. Data Quality
3.2. Gap Filling
3.3. DEM Generation
4. Results and Discussion
4.1. Data Quality
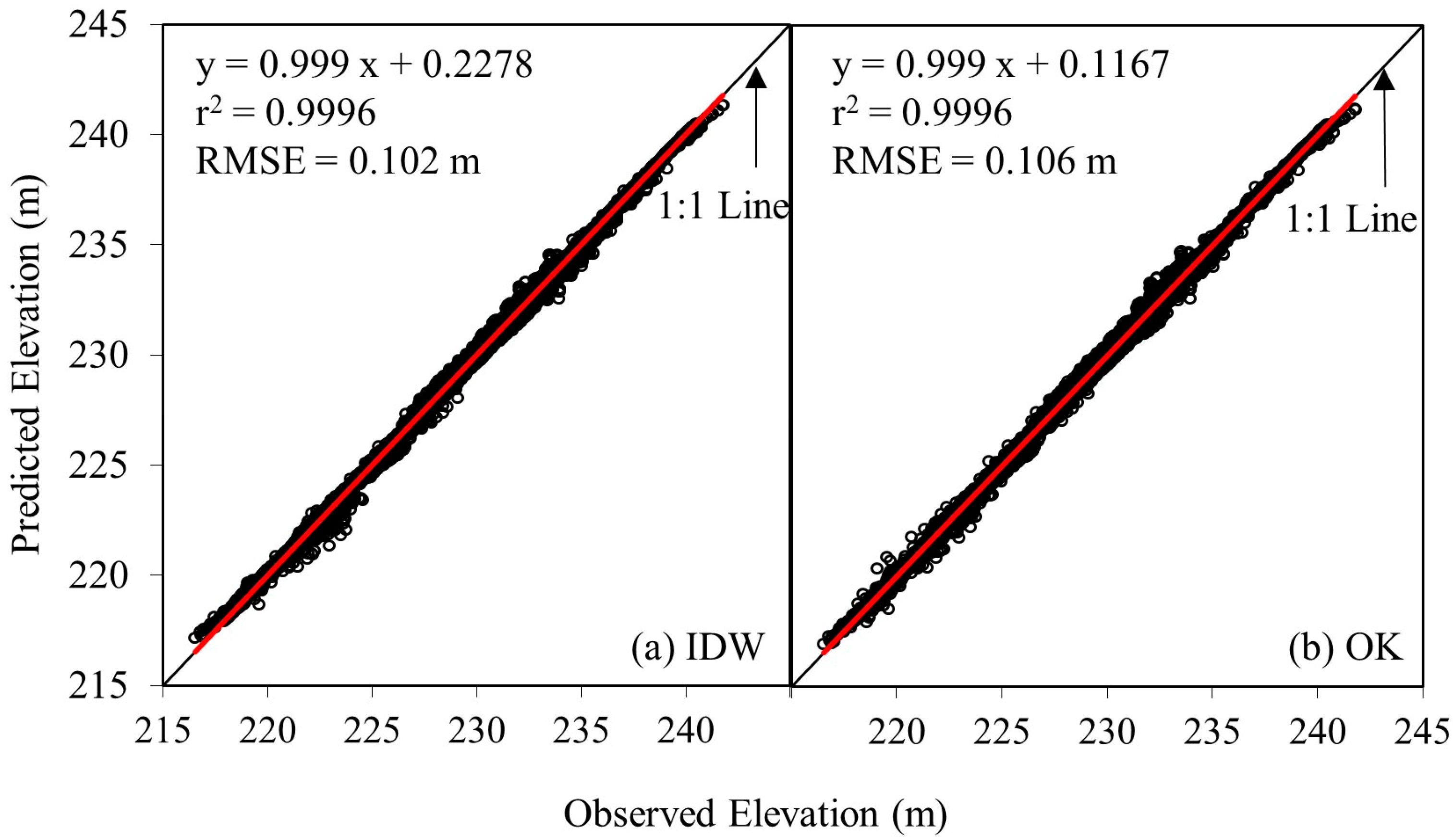
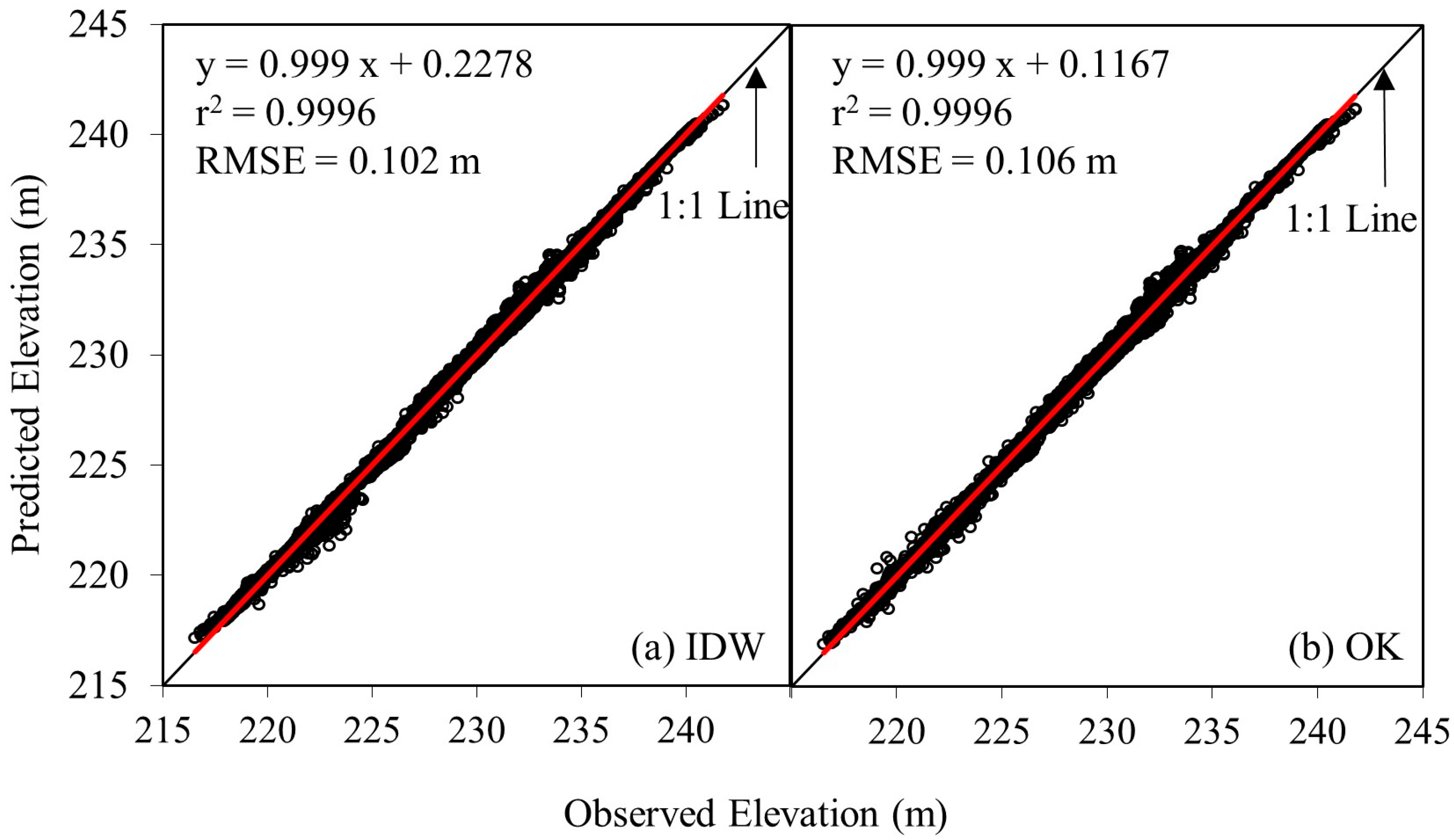
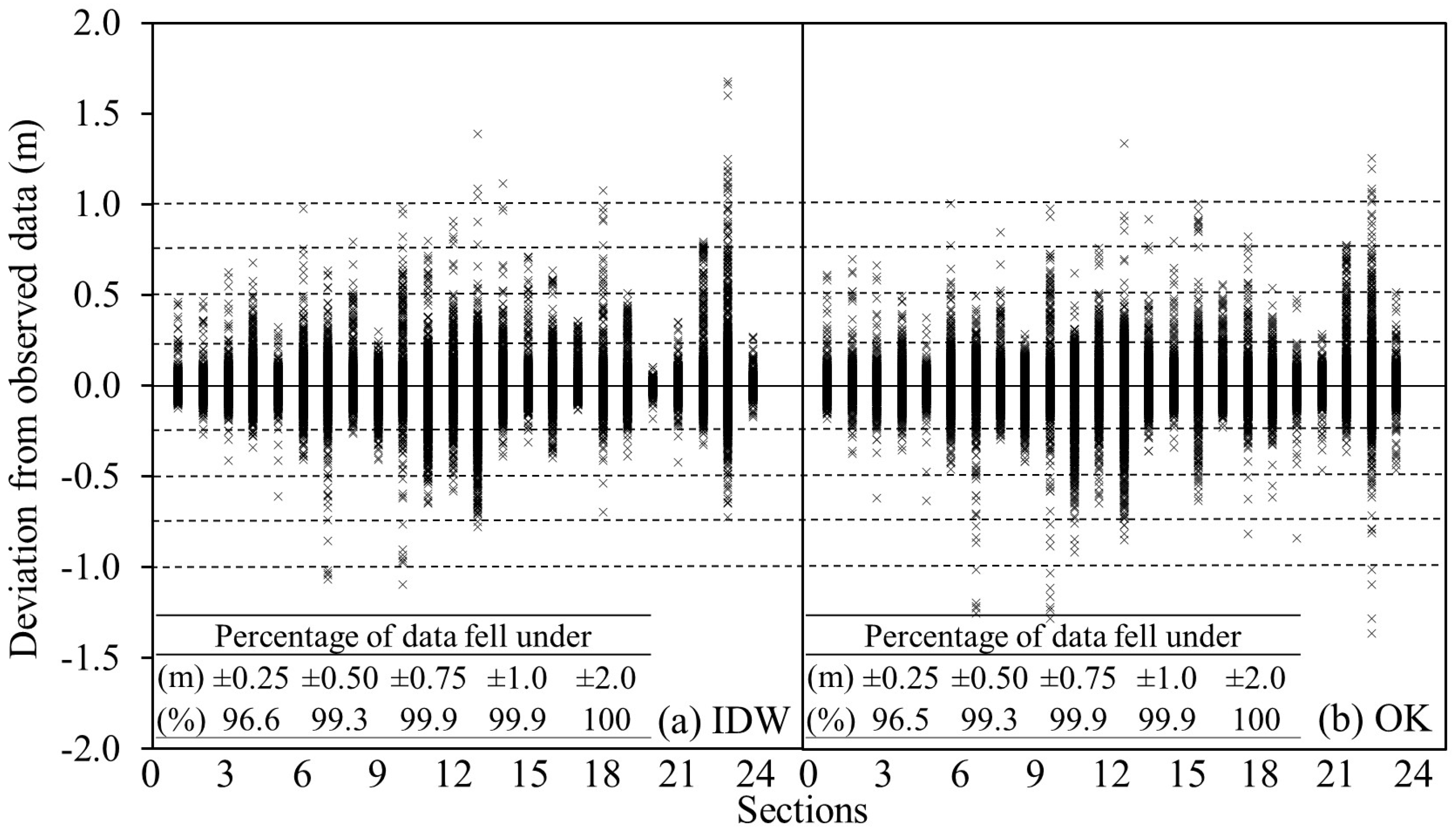
4.2. Comparison of Spatial Interpolation Methods
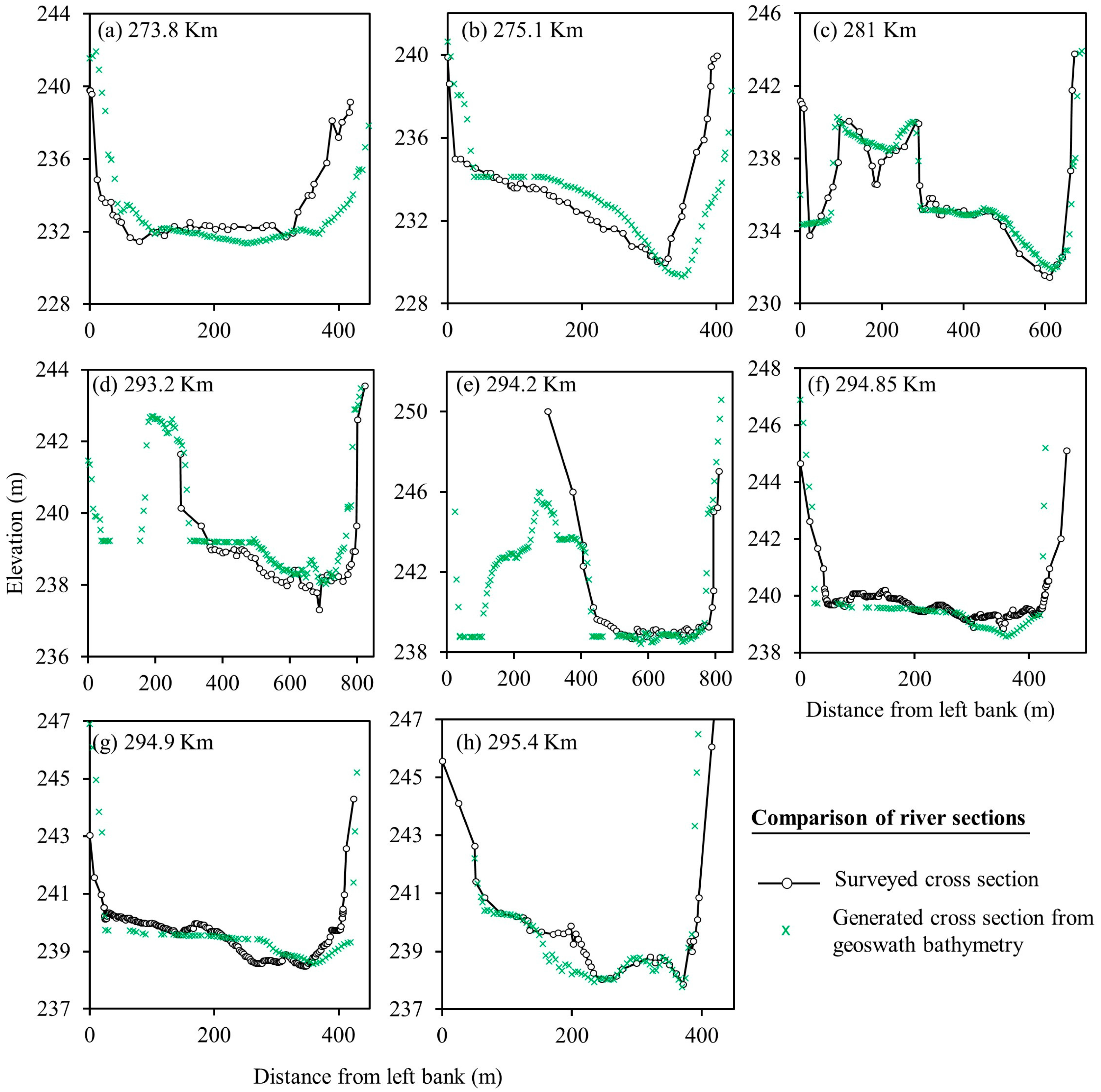
4.3. Final DEM Generation
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Natural Resources Canada (NRCAN). Oil Resources. Available online: http://www.nrcan.gc.ca/energy/oil-sands/18085 (accessed on 15 October 2016).
- Brasington, J.; Rumsby, B.; McVey, R. Monitoring and modelling morphological change in a braided gravel-bed river using high resolution GPS-based survey. Earth Surf. Proc. Landf. 2000, 25, 973–990. [Google Scholar] [CrossRef]
- Large, A.R.G.; Heritage, G.L. Laser scanning—Evolution of the discipline. In Laser Scanning for the Environmental Sciences; Heritage, G., Large, A.R.G., Eds.; Wiley Blackwell: West Sussex, UK, 2009; pp. 1–20. [Google Scholar]
- Milan, D.; Heritage, G.; Large, A.; Fuller, I. Filtering spatial error from DEMs: Implications for morphological change estimation. Geomorphology 2011, 125, 160–171. [Google Scholar] [CrossRef]
- Lyu, H.-M.; Wang, G.-F.; Shen, J.S.; Lu, L.-H.; Wang, G.-Q. Analysis and GIS mapping of flooding hazards on 10 May 2016, Guanzhou, China. Water 2016, 8, 447. [Google Scholar] [CrossRef]
- Rydlund, P.H., Jr.; Densmore, B.K. Methods of Practice and Guidelines for Using Survey-Grade Global Navigation Satellite Systems (GNSS) to Establish Vertical Datum in the United States Geological Survey; U.S. Geological Survey Techniques and Methods, Book 11, Chapter D1; U.S. Geological Survey: Reston, VA, USA, 2012; p. 102. Available online: http://pubs.usgs.gov/tm/11d1/ (accessed on 15 September 2016).
- Webster, T.; McGuigan, K.; Collins, K.; MacDonald, C. Integrated river and coastal hydrodynamic flood risk mapping of the LaHave River Estuary and town of Bridgewater, Nova Scotia, Canada. Water 2014, 6, 517–546. [Google Scholar] [CrossRef]
- Schwendel, A.C.; Fuller, I.C.; Death, R.G. Assessing DEM interpolation methods for effective representation of upland stream morphology for rapid appraisal of bed stability. River Res. Appl. 2012, 28, 567–584. [Google Scholar] [CrossRef]
- Allouis, T.; Bailly, J.; Pastol, Y.; Le Roux, C. Comparison of LiDAR waveform processing methods for very shallow water bathymetry using Raman, near-infrared and green signals. Earth Surf. Proc. Landf. 2010, 35, 640–650. [Google Scholar] [CrossRef]
- Heritage, G.L.; Milan, D.J.; Large, A.R.G.; Fuller, I.C. Influence of survey strategy and interpolation model on DEM quality. Geomorphology 2009, 112, 334–344. [Google Scholar] [CrossRef]
- Chilès, J.-P.; Delfiner, P. Geostatistics: Modeling Spatial Uncertainty, 2nd ed.; John Wiley & Sons Inc.: Hoboken, NJ, USA, 2012; p. 734. [Google Scholar]
- Charlton, M.E.; Large, A.R.G.; Fuller, I.C. Application of airborne LiDAR in river environments: The River Coquet, Northumberland, UK. Earth Surf. Proc. Landf. 2003, 28, 299–306. [Google Scholar] [CrossRef]
- Li, J.; Heap, A.D. Spatial interpolation methods applied in the environmental sciences: A review. Environ. Model. Softw. 2014, 53, 173–189. [Google Scholar] [CrossRef]
- Cho, H.; Hong, S.; Kim, S.; Park, H.; Park, I.; Sohn, H.-G. Application of a Terrestrial LIDAR System for Elevation Mapping in Terra Nova Bay, Antarctica. Sensors 2015, 15, 23514–23535. [Google Scholar] [CrossRef] [PubMed]
- Merwade, V. Effect of spatial trends on interpolation of river bathymetry. J. Hydrol. 2009, 371, 169–181. [Google Scholar] [CrossRef]
- Kardos, M. Interpolating river’s morphological model from cross sectional survey. In Second Conference of Junior Researchers in Civil Engineering; Budapest University of Technology and Economics (BME): Budapest, Hungary, 2013; pp. 243–248. Available online: https://www.me.bme.hu/doktisk/konf2013/papers/243-248.pdf (accessed on 15 February 2016).
- Fonstad, M.A.; Marcus, W.A. Remote sensing of stream depths with hydraulically assisted bathymetry (HAB) models. Geomorphology 2005, 72, 320–339. [Google Scholar] [CrossRef]
- Šiljeg, A.; Lozíc, S.; Šiljeg, S. A comparison of interpolation methods on the basis of data obtained from a bathymetric survey of Lake Vrana, Croatia. Hydrol. Earth Syst. Sci. 2015, 19, 3653–3666. [Google Scholar] [CrossRef]
- Glenn, J.; Tonina, D.; Morehead, M.D.; Fiedler, F.; Benjankar, R. Effect of transect location, transect spacing and interpolation methods on river bathymetry accuracy. Earth Surf. Proc. Landf. 2016, 41, 1185–1198. [Google Scholar] [CrossRef]
- Panhalkar, S.S.; Jarag, A.P. Assessment of spatial interpolation techniques for river bathymetry generation of Panchganga River basin using geoinformatic techniques. Asian J. Geoinform. 2015, 15, 9–15. [Google Scholar]
- Conner, J.T.; Tonina, D. Effect of cross-section interpolated bathymetry on 2D hydrodynamic model results in a large river. Earth Surf. Proc. Landf. 2013, 39, 463–475. [Google Scholar]
- Hilldale, R.C.; Raff, D. Assessing the ability of airborne LiDAR to map river bathymetry. Earth Surf. Proc. Landf. 2008, 33, 773–783. [Google Scholar] [CrossRef]
- Regional Aquatics Monitoring Program (RAMP). Athabasca River Basin. Available online: http://www.ramp-alberta.org/river.aspx (accessed on 20 November 2015).
- Canadian Council of Ministers of the Environment (CEMA). Lower Athabasca Data. Available online: http://ftp.cciw.ca/incoming/LowerAthabasca_data_March05.12/ (accessed on 5 December 2015).
- Natural Resources Canada (NRCAN). Height Reference System Modernization. Available online: http://www.nrcan.gc.ca/earth-sciences/geomatics/geodetic-reference-systems/9054 (accessed on 10 January 2016).
- El-Hattab, A.I. Single beam bathymetry data modelling techniques for accurate maintenance dredging. Egypt. J. Remote Sens. Space Sci. 2014, 17, 189–195. [Google Scholar]
- Hell, B.; Jakobsson, M. Gridding heterogeneous bathymetric data sets with stacked continuous curvature splines in tension. Mar. Geophys. Res. 2011, 32, 493–501. [Google Scholar] [CrossRef]
- Gao, J. Bathymetric mapping by means of remote sensing: Methods, accuracy and limitations. Prog. Phys. Geogr. 2009, 33, 103–116. [Google Scholar] [CrossRef]
- Jawak, S.D.; Vadlamani, S.S.; Luis, A.J. A synoptic review on deriving bathymetry information using remote sensing technologies: Models, Methods and Comparisons. Adv. Remote Sens. 2015, 4, 147–162. [Google Scholar] [CrossRef]
- Ler, L.G.; Holz, K.-P.; Choi, G.W.; Byeon, S.J. Tidal Data Generation for Sparse Data Regions in Han River Estuary Located in the Trans-Boundary of North and South Korea. Int. J. Control Autom. 2015, 8, 203–214. [Google Scholar] [CrossRef]
- Uddin, M.; Alam, J.B.; Khan, Z.H.; Hasan, G.M.J.; Rahman, T. Two dimensional hydrodynamic modelling of Northern Bay of Bengal coastal waters. Comput. Water Energy Environ. Eng. 2014, 3, 140–151. [Google Scholar] [CrossRef]
- Watson, D.F.; Philip, G.M. A refinement of inverse distance weighted interpolation. Geo-Processing 1985, 2, 315–327. [Google Scholar]
- Oliver, M.A.; Webster, R. Kriging: A method of interpolation for geographical information systems. Int. J. Geogr. Inf. Syst. 1990, 4, 313–332. [Google Scholar] [CrossRef]
- Longley, P.A.; Goodchild, M.F.; Maguire, D.J.; Rhind, D.W. Geographic Information Systems and Science, 3rd ed.; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2010; p. 560. [Google Scholar]
- Curtarelli, M.; Leão, J.; Ogashawara, I.; Lorenzzetti, J.; Stech, J. Assessment of spatial interpolation methods to map the bathymetry of an Amazonian hydroelectric reservoir to aid in decision making for water management. ISPRS Int. J. Geo-Inf. 2015, 4, 220–235. [Google Scholar] [CrossRef]
- Moskalik, M.; Grabowiecki, P.; Tegowski, J.; Żulichowska, M. Bathymetry and geographical regionalization of Brepollen (Hornsund, Spitsbergen) based on bathymetric profiles interpolations. Pol. Polar Res. 2013, 34, 1–22. [Google Scholar] [CrossRef]
- Neill, C.R. Hydraulic and Morphologic Characteristics of Athabasca River near fort Assiniboine—The Anatomy of a Wandering Gravel River; Report REH/73/3; Alberta Cooperative Research Program, Highway and Engineering Division: Edmonton, AB, Canada, 1973; p. 23. [Google Scholar]
- Hooke, J.M. River channel adjustment to meander cutoffs on the River Bollin and River Dane, Northwest England. Geomorphology 1995, 14, 235–253. [Google Scholar] [CrossRef]
- Carson, M.A. Sediment Budget for the Athabasca River Basin, Alberta, between Fort McMurray and Embarras, 1876–1986; Report for the Inland Waters Directorate; Environment Canada: Calgary, AB, Canada, 1990; p. 42.
- Hebben, T. Analysis of Water Quality Conditions and Trends for the Long-Term River Network: Athabasca River, 1960–2007; Alberta Environment, Water Policy Branch, Environmental Assurance: Edmonton, AB, Canada, 2009; p. 341. Avaiable online: http://aep.alberta.ca/water/programs-and-services/surface-water-quality-program/documents/WaterQualityTrendsAthabascaRiver-Mar2009.pdf (accessed on 15 September 2016).
- Merwade, V.M.; Maidment, D.R.; Goff, J.A. Anisotropic considerations while interpolating river channel bathymetry. J. Hydrol. 2006, 331, 731–741. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data Type | Description | Source |
|---|---|---|
| Geoswath bathymetry | This data has a horizontal spatial resolution of 5–10 m from Fort McMurray to Firebag river confluence (2012–2014). | Environment Canada |
| Point cloud LiDAR data | This data includes floodplain and island topography of Upper and Lower Athabasca River Watershed (2005–2012). | Government of Alberta |
| Legacy data | Surveyed cross-section (1977–2002): 43 detailed survey cross-sections between Crooked Rapids and Steepbank River. | University of Alberta (from Dr. Faye Hicks) |
| Acoustic Doppler Current Profiler (ADPC) regions (2001–2008): high resolution elevation data at six selected regions from Fort McMurray to Old Fort. | Canadian Council of Ministers of the Environment, 2012 [24] |
| Regions | Number of Points | r2 | Slope | Intercept | RMSE (m) | RE (%) |
|---|---|---|---|---|---|---|
| Area 4 | 3260 | 0.000 | −0.011 | 231.023 | 3.243 | 0.789 |
| Area 5 | 4848 | 0.152 | 0.427 | 130.829 | 1.685 | 1.685 |
| Reach 4 | 4110 | 0.138 | 0.294 | 158.162 | 1.117 | 1.117 |
| Reach 5 | 3963 | 0.134 | 0.267 | 171.071 | 0.332 | 0.332 |
| Methods | Parameters |
|---|---|
| (a) Considering deleted Geoswath grid points in 24 sections: | |
| IDW | Neighbours = 25; length of semi-axis = 28,950; power = 2 |
| OK (1) | Neighbours = 25; length of semi-axis = 3450; lags = 12; lag size = 473; semivariogram = stable |
| OK (2) | Neighbours = 25; major semi-axis =5672; minor semi-axis =1899; lags = 12; lag size = 473; semivariogram = stable |
| (b) Considering all available Geoswath grid points: | |
| IDW | Neighbours = 25; length of semi-axis = 28,950; power = 2 |
| OK (1) | Neighbours = 25; length of semi-axis = 3450; lags = 12; lag size = 452; semivariogram = stable |
| Methods | Bias (m) | r2 | RMSE (m) | RE (%) |
|---|---|---|---|---|
| (a) Considering deleted Geoswath grid points in 24 sections: | ||||
| IDW | 0.024 | 0.991 | 0.478 | 0.010 |
| OK (1) | −0.072 | 0.987 | 0.579 | −0.032 |
| OK (2) | −0.071 | 0.983 | 0.668 | −0.032 |
| (b) Considering all available Geoswath grid points: | ||||
| IDW | 0.003 | 0.999 | 0.102 | 0.001 |
| OK (1) | 0.006 | 0.999 | 0.106 | 0.003 |
© 2017 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chowdhury, E.H.; Hassan, Q.K.; Achari, G.; Gupta, A. Use of Bathymetric and LiDAR Data in Generating Digital Elevation Model over the Lower Athabasca River Watershed in Alberta, Canada. Water 2017, 9, 19. https://doi.org/10.3390/w9010019
Chowdhury EH, Hassan QK, Achari G, Gupta A. Use of Bathymetric and LiDAR Data in Generating Digital Elevation Model over the Lower Athabasca River Watershed in Alberta, Canada. Water. 2017; 9(1):19. https://doi.org/10.3390/w9010019
Chicago/Turabian StyleChowdhury, Ehsan H., Quazi K. Hassan, Gopal Achari, and Anil Gupta. 2017. "Use of Bathymetric and LiDAR Data in Generating Digital Elevation Model over the Lower Athabasca River Watershed in Alberta, Canada" Water 9, no. 1: 19. https://doi.org/10.3390/w9010019
APA StyleChowdhury, E. H., Hassan, Q. K., Achari, G., & Gupta, A. (2017). Use of Bathymetric and LiDAR Data in Generating Digital Elevation Model over the Lower Athabasca River Watershed in Alberta, Canada. Water, 9(1), 19. https://doi.org/10.3390/w9010019