
Design and Analysis of a New High Precision Decoupled XY Compact Parallel Micromanipulator


Abstract
:1. Introduction
2. Mechanical Design of the DCPM
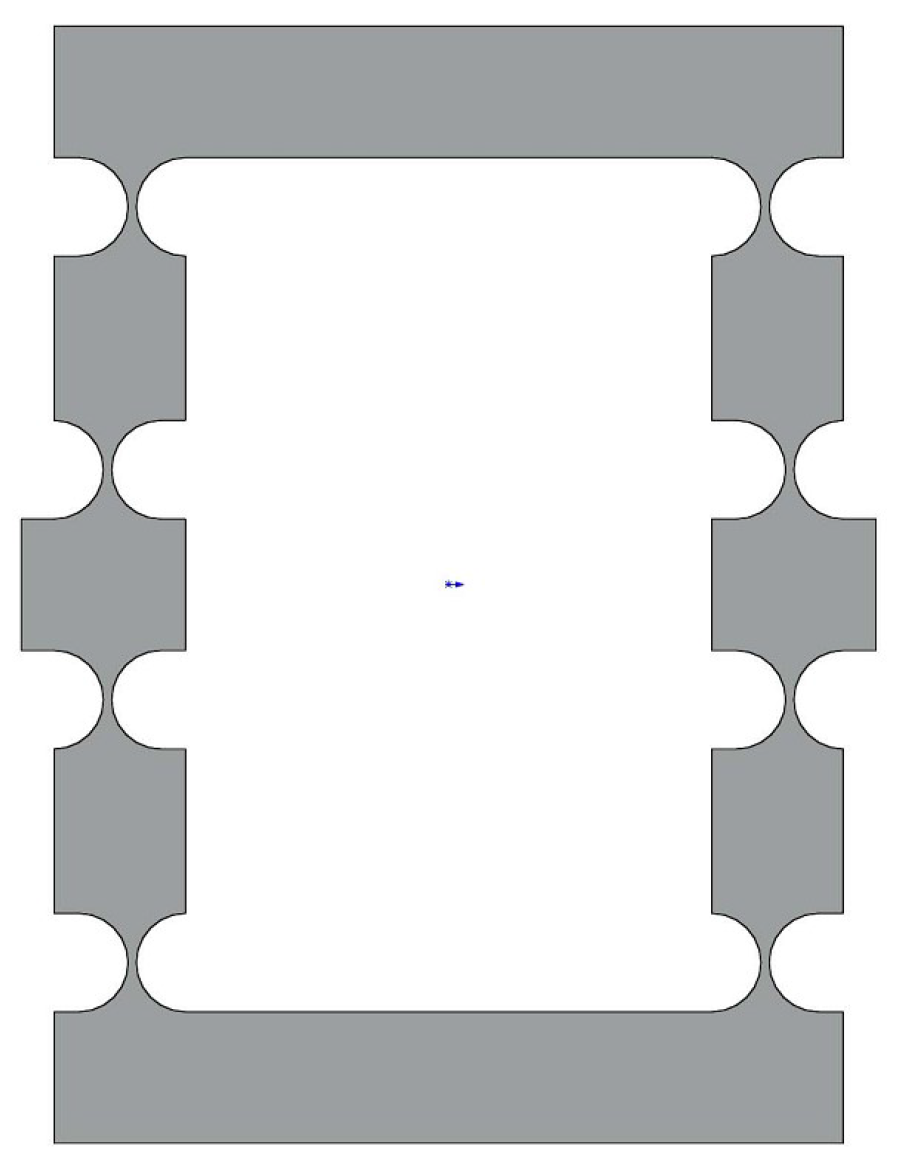
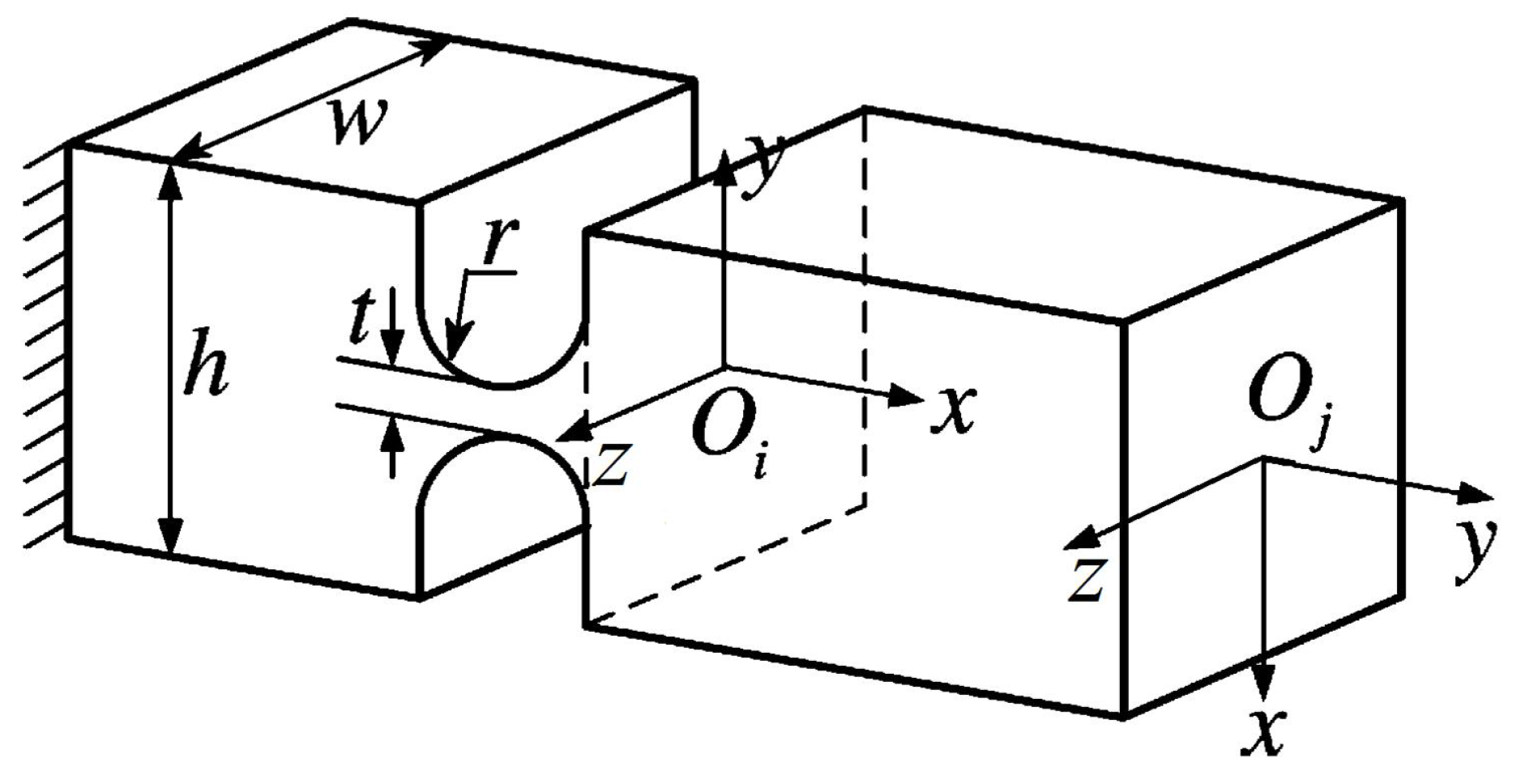
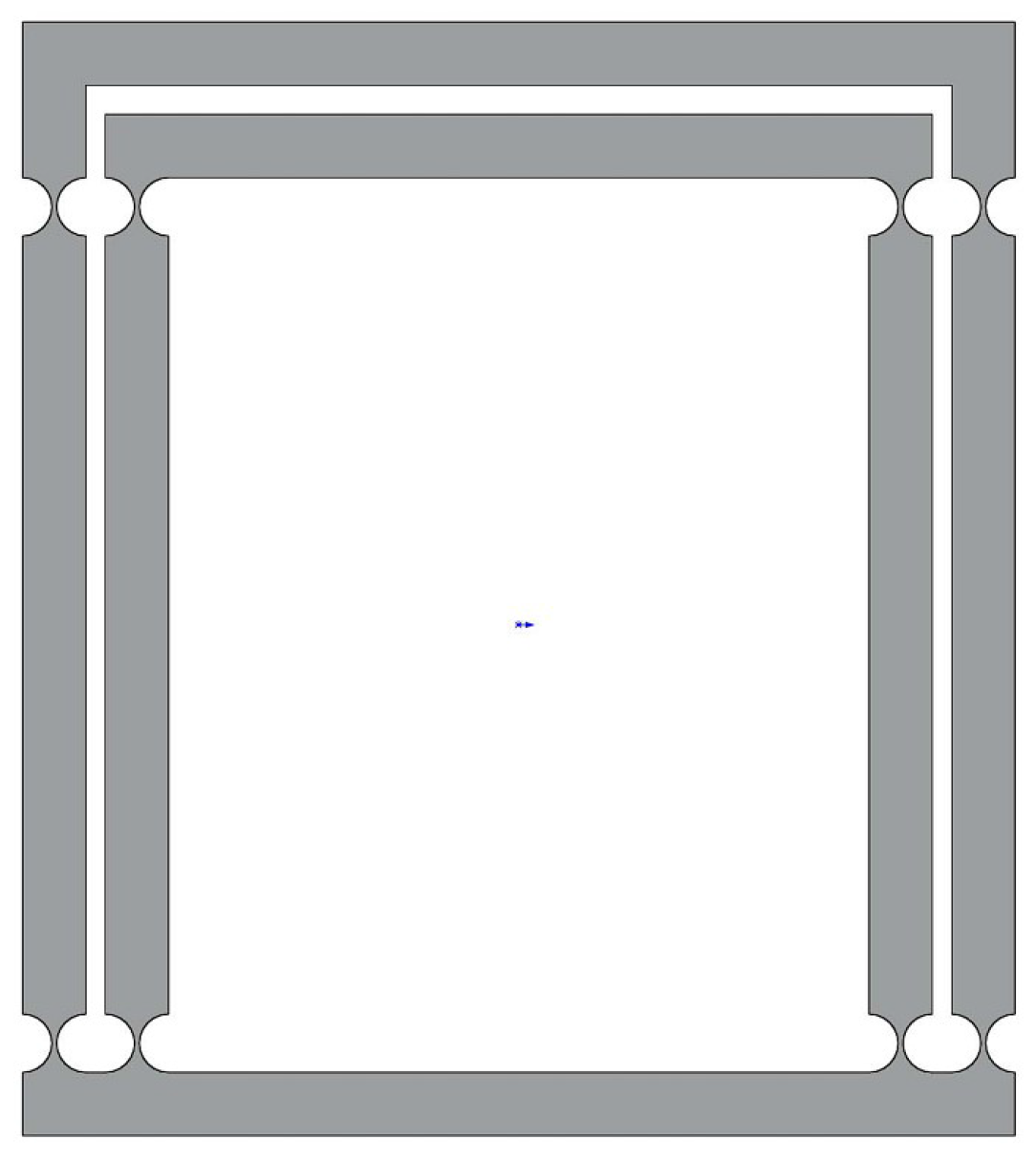
2.1. Design and Analysis of a Amplifier
2.2. The Series Connection of the Basic Mechanism
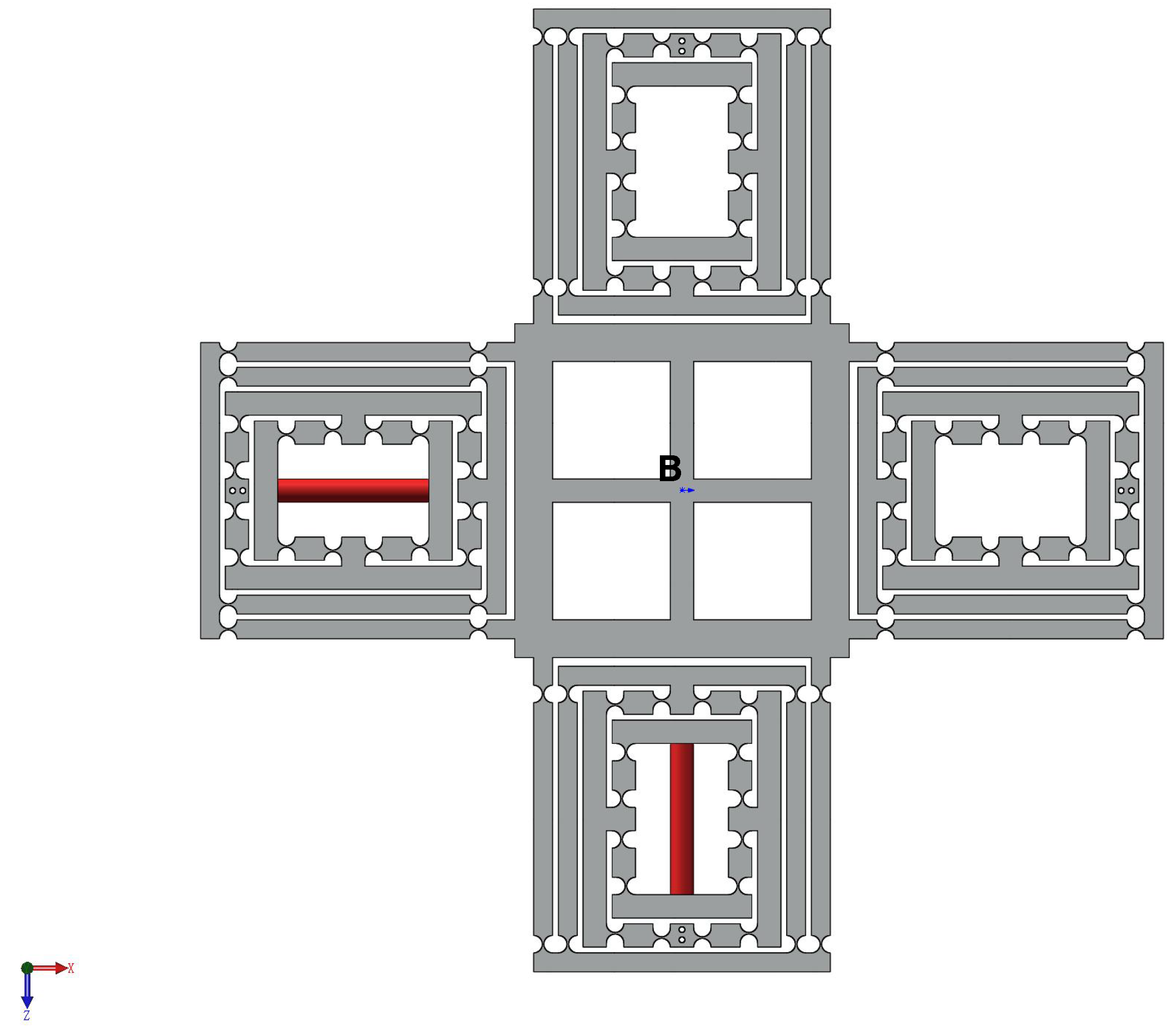
2.3. Design of the Decoupled Flexure Mechanism
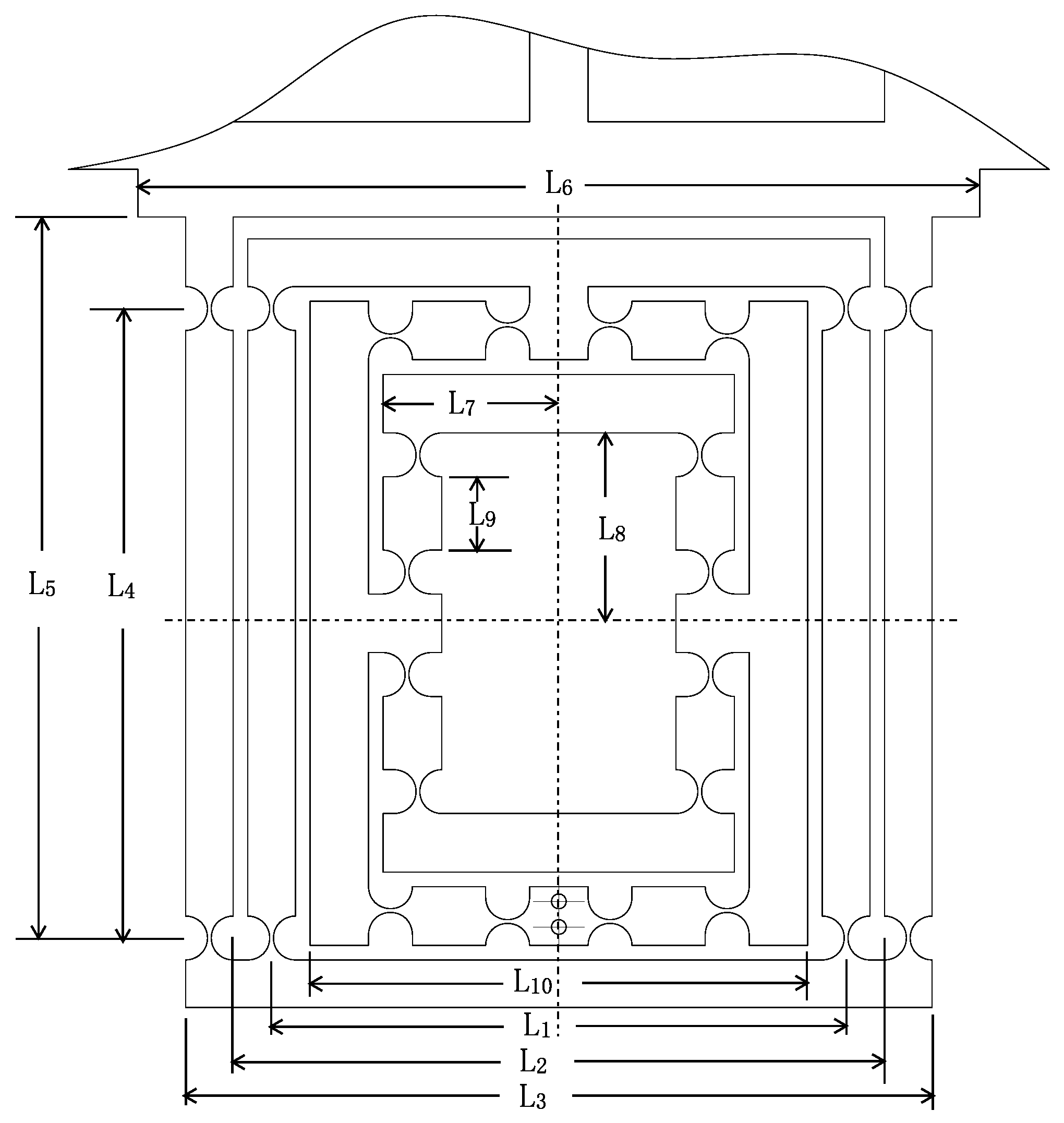
2.4. A New High Precision Decoupled XY Compact Parallel Micromanipulator
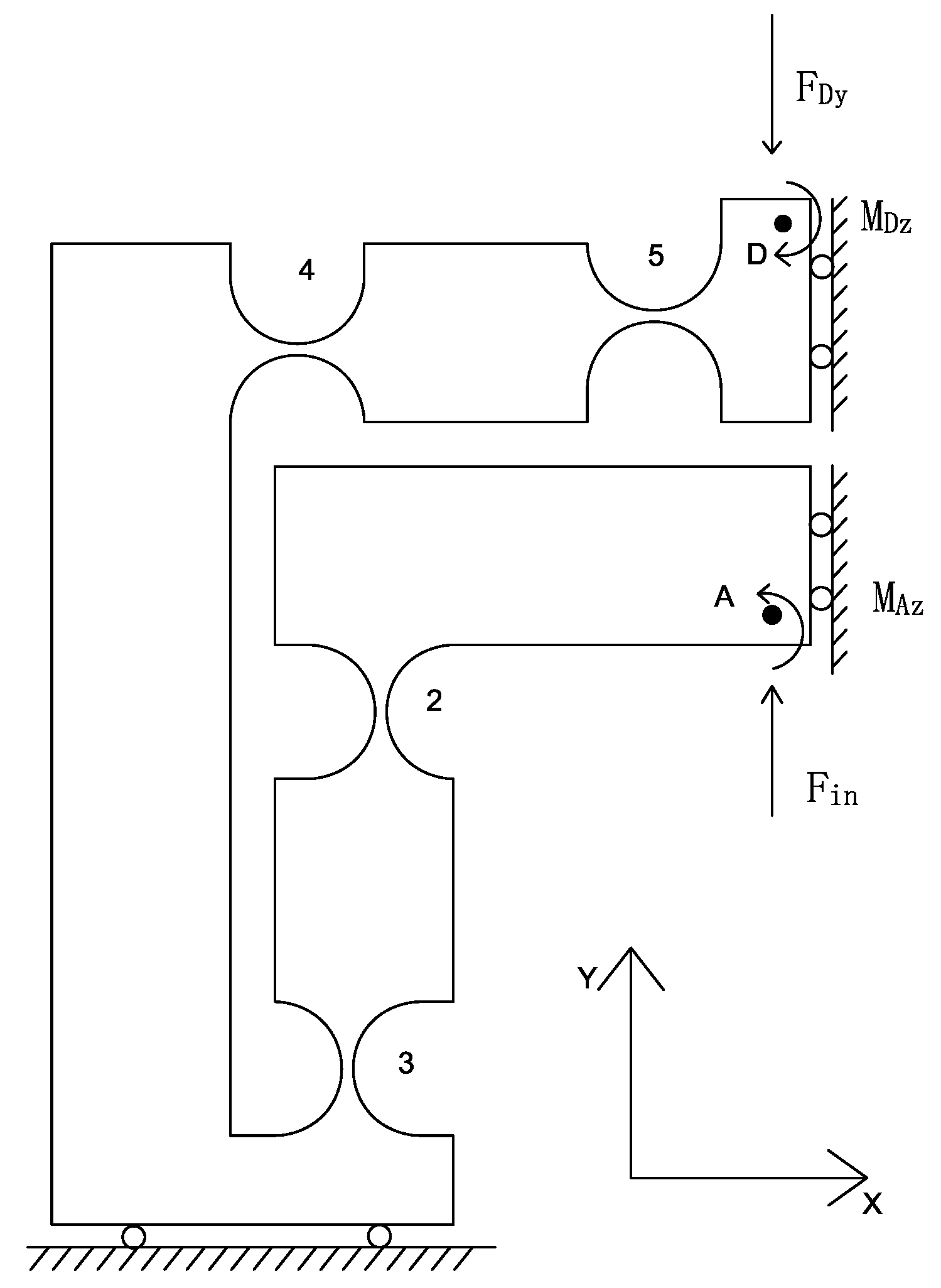
3. Compliance and Stiffness Modeling of the Flexure Mechanism Based on the Matrix Method
3.1. Output Compliance Analysis
3.1.1. Output Compliance of the Amplifier
3.1.2. Output Compliance of the XY Stage
3.2. Input Stiffness Analysis
3.3. The Amplification Ratio of the XY Stage
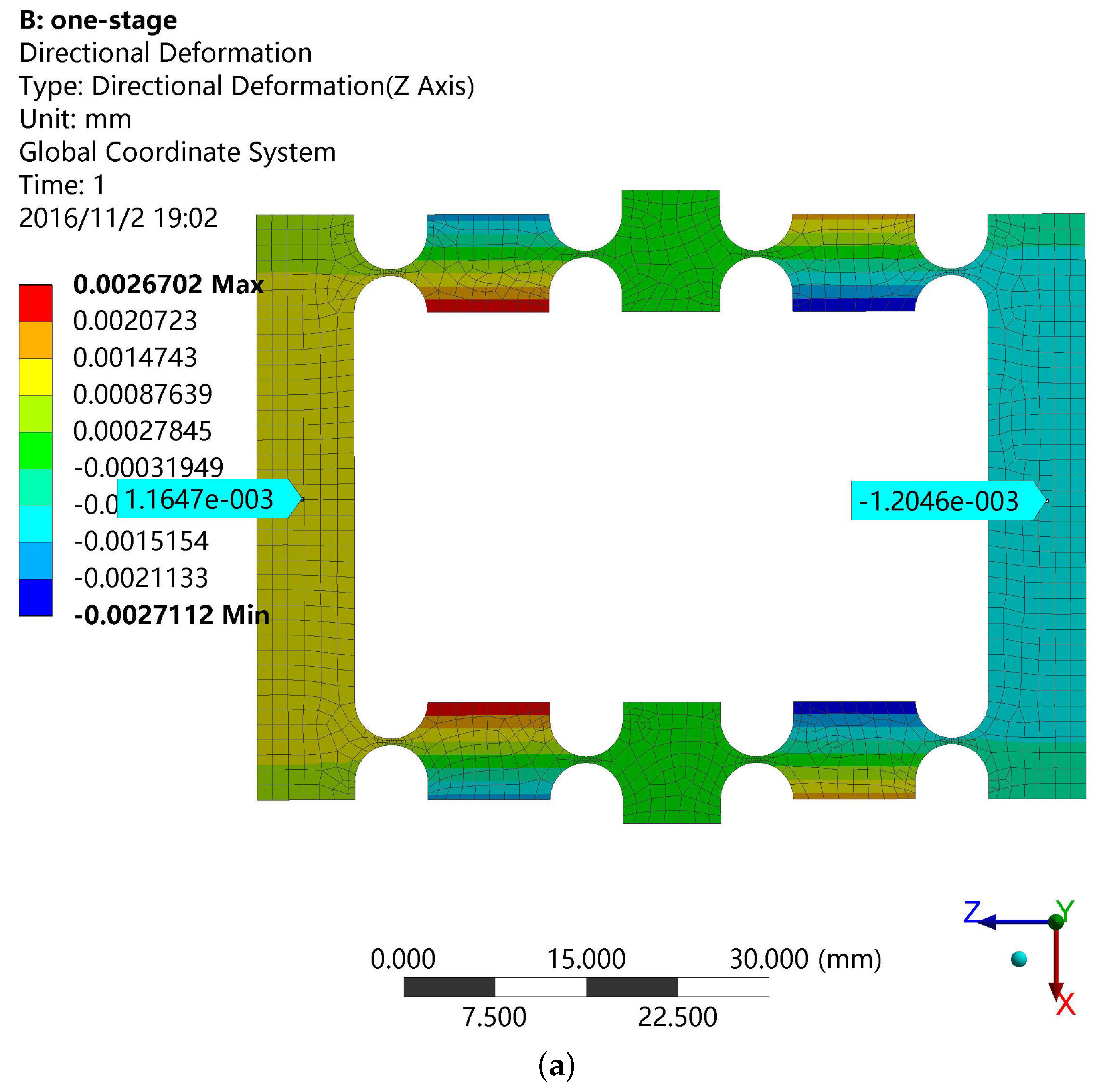
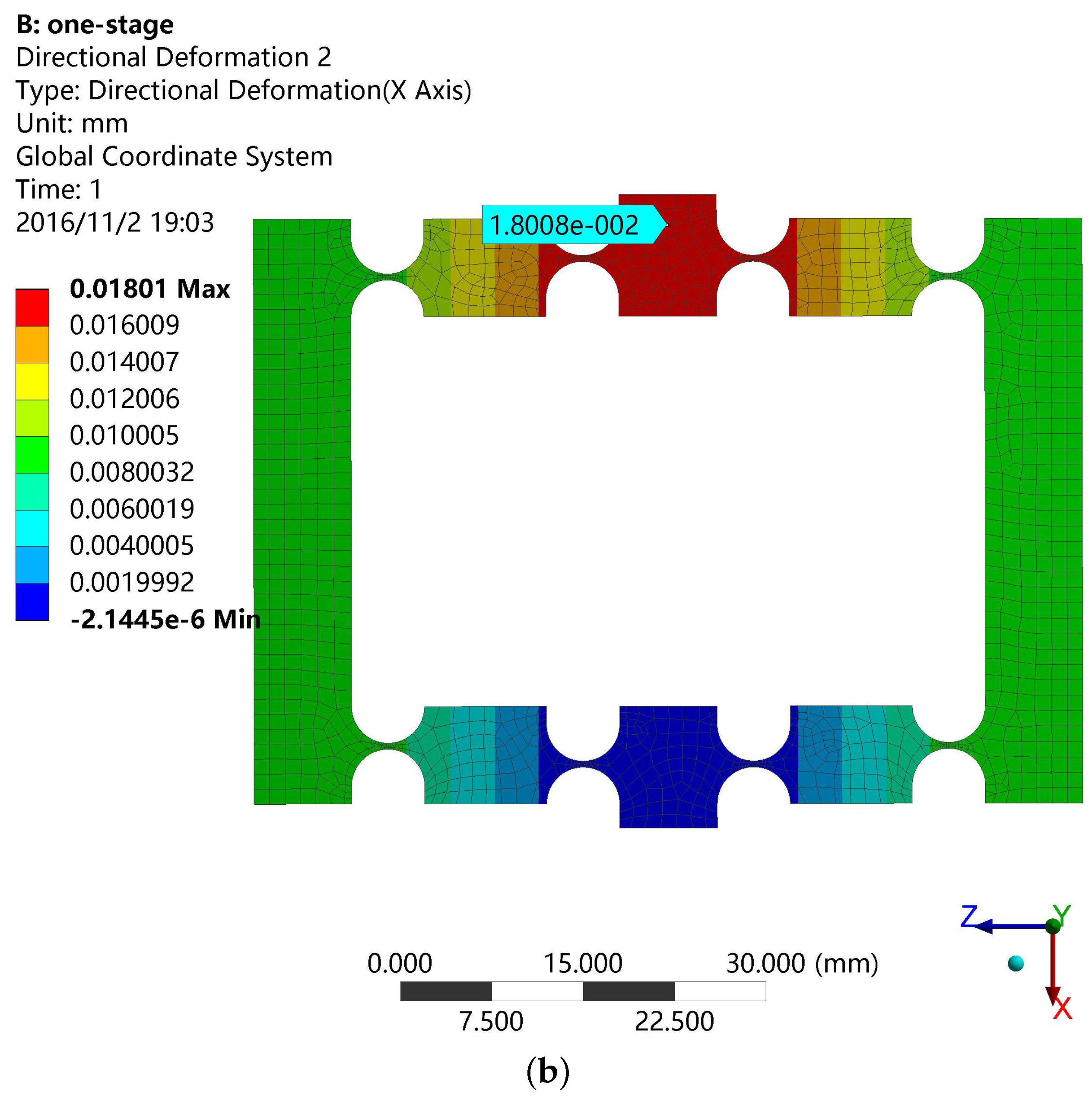
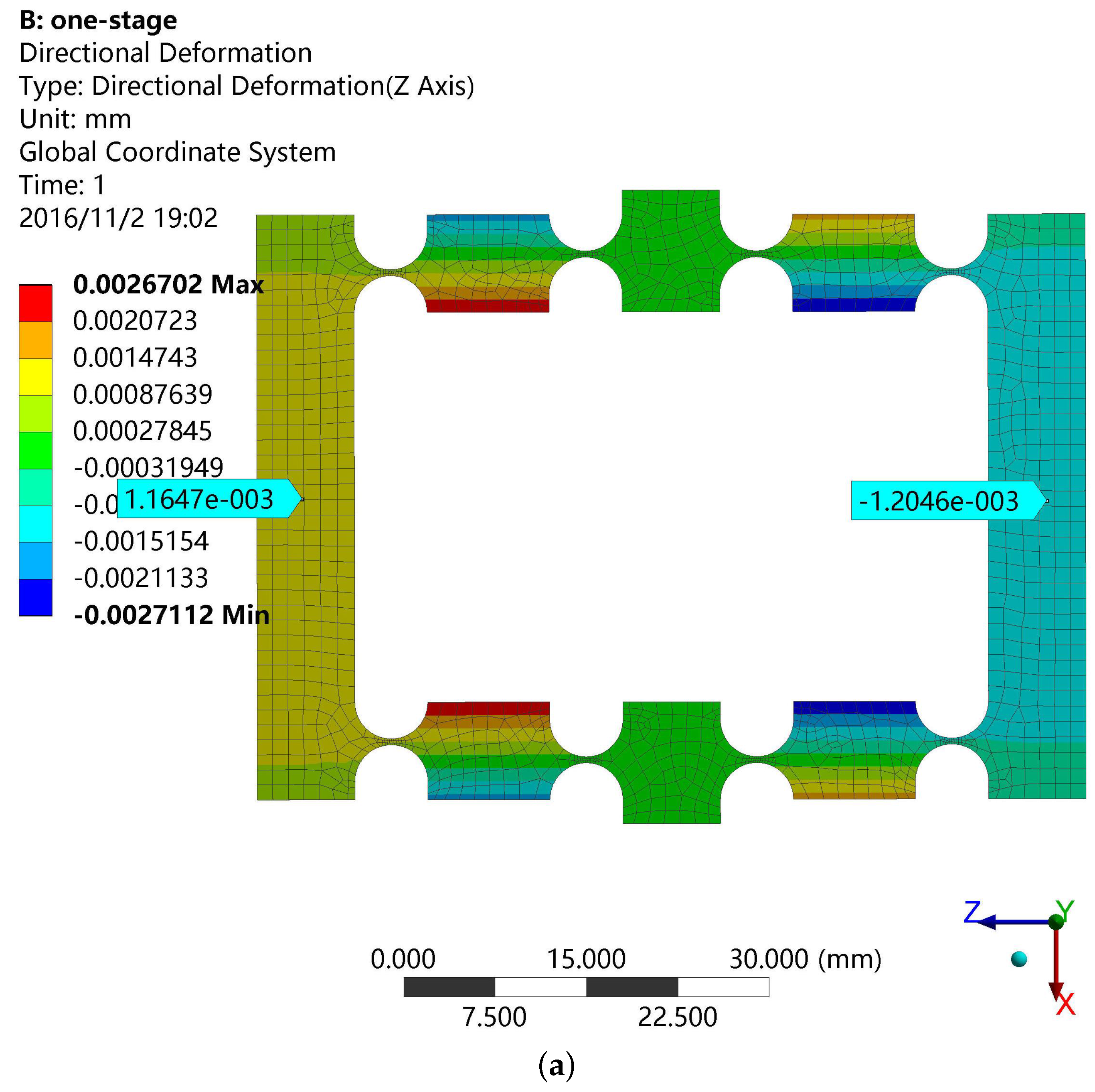
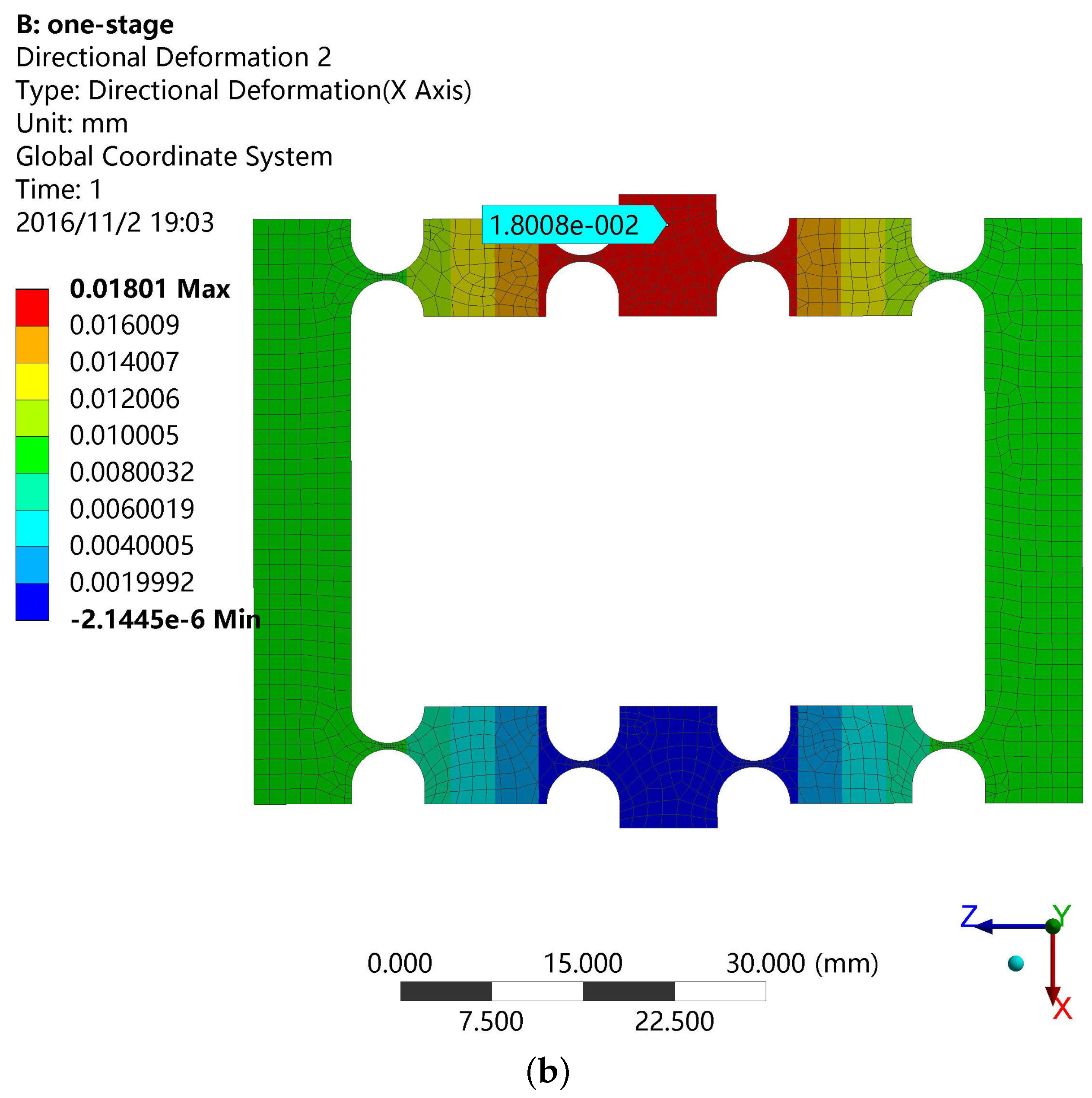
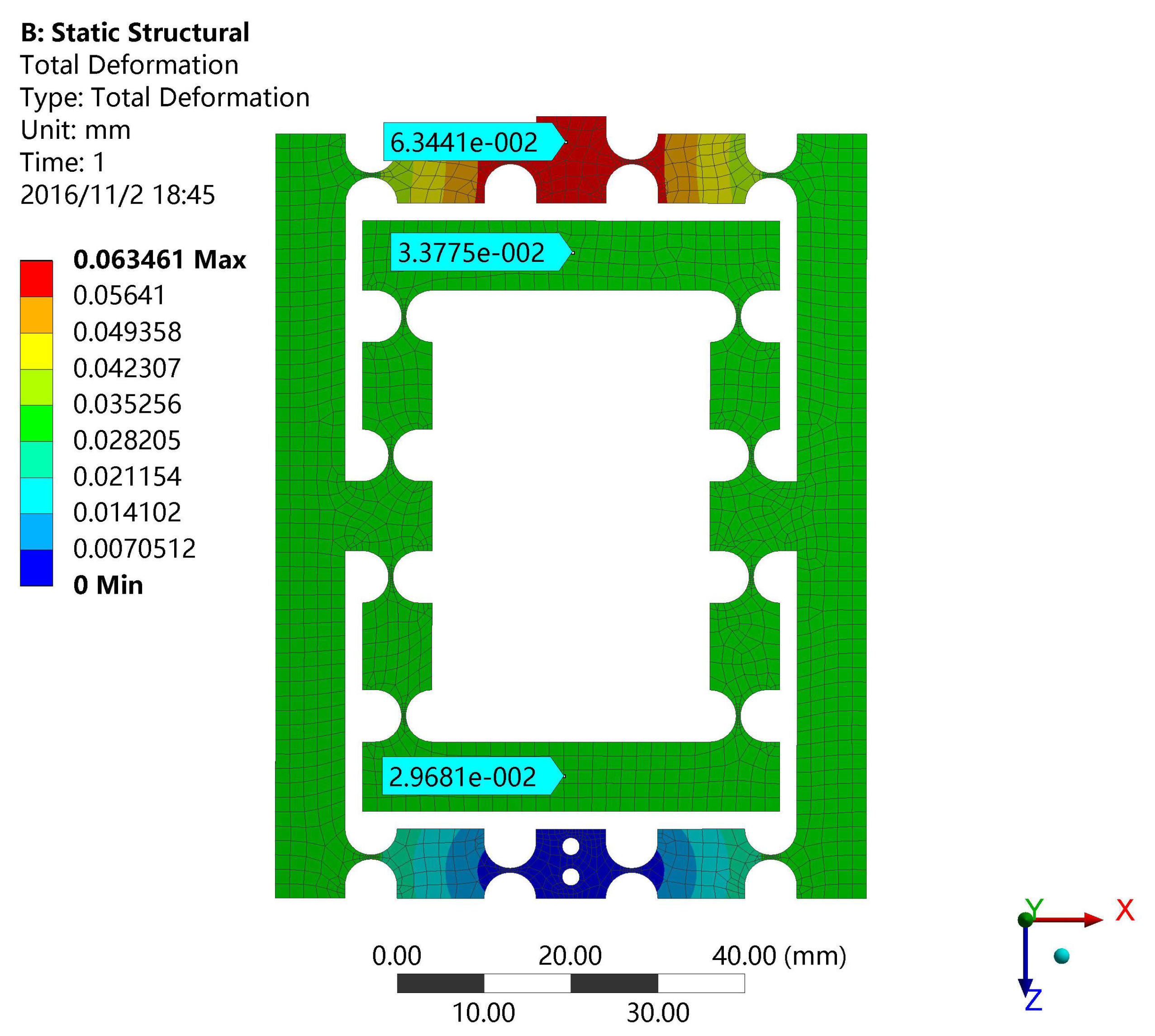
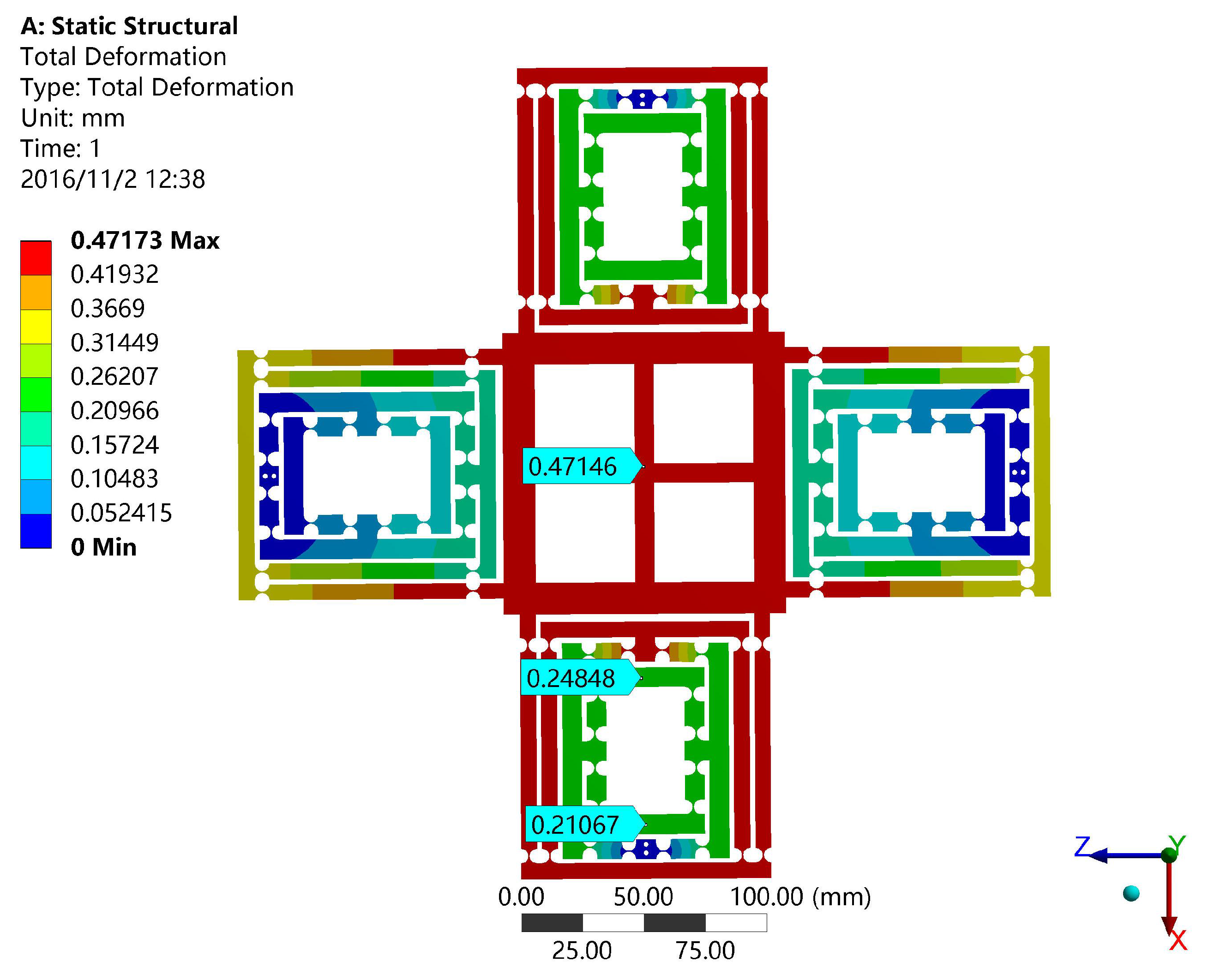
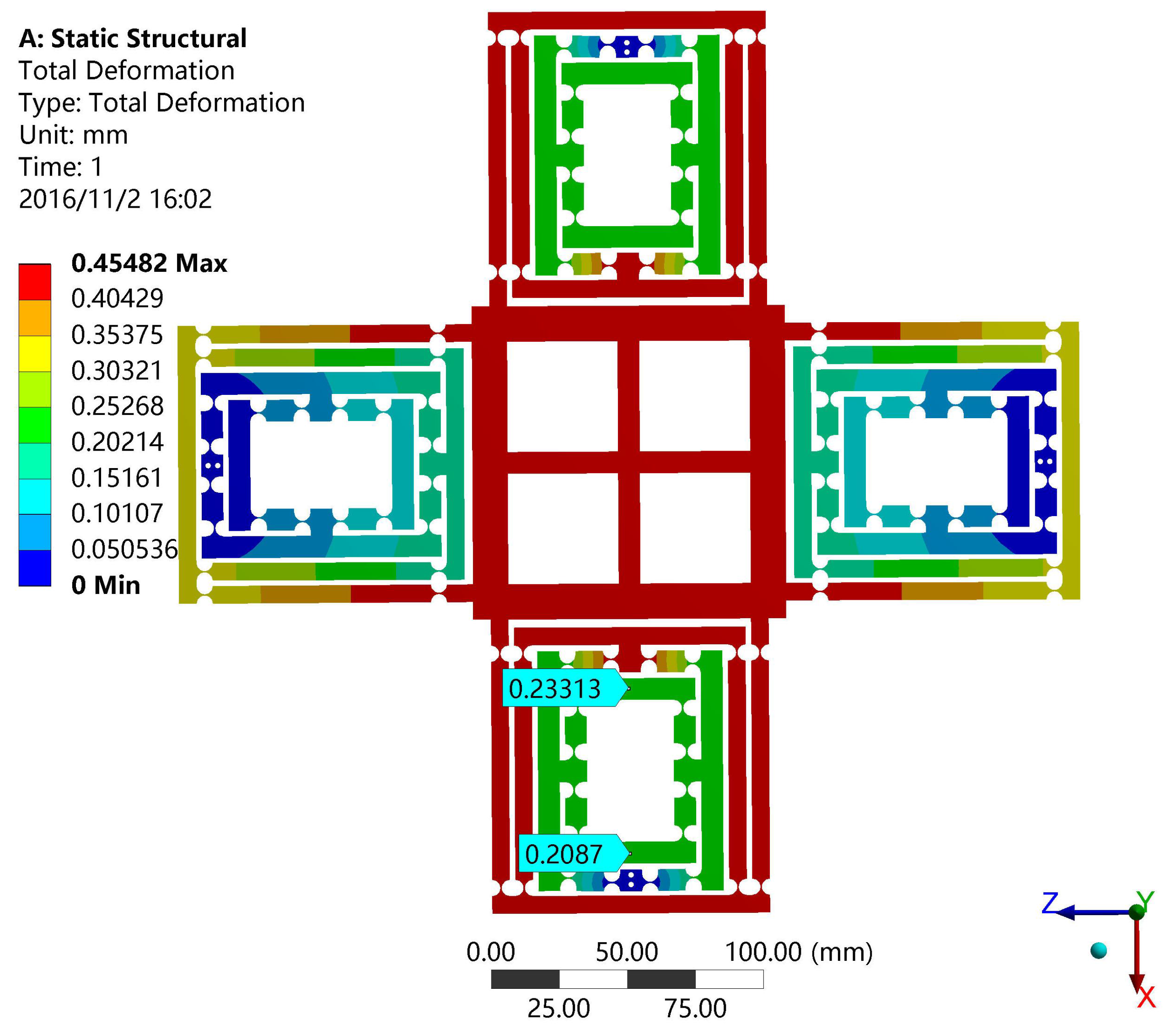
4. Finite Element Analysis (FEA) Validation
5. Discussion
6. Conclusions
- (1)
- Optimizing the parameters of the XY stage to obtain better performance;
- (2)
- Conducting analytical methodology for dynamics analysis;
- (3)
- Experiments will be carried out for a prototype fabrication;
- (4)
- A control system will be designed and conducted by applying different control methods.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Polit, S.; Dong, J. Development of a high-bandwidth XY nanopositioning stage for high-rate micro-/nanomanufacturing. IEEE/ASME Trans. Mechatron. 2011, 16, 724–733. [Google Scholar] [CrossRef]
- Choi, K.B.; Lim, H.J.; Kim, G.H.; Lee, J.J. A flexure-based scanner for a fully bidirectional operation driven by a differential piezo force. J. Mech. Eng. Sci. 2014, 228, 3186–3199. [Google Scholar] [CrossRef]
- Pernette, E.; Henein, S.; Magnani, I.; Clavel, R. Design of parallel robots in microrobotics. Robotica 1997, 15, 417–420. [Google Scholar] [CrossRef]
- Moon, Y.M.; Kota, S. Design of compliant parallel kinematic machines. In Proceedings of the ASME International Design Engineering Technical Conferences and Computers and Information in Engineering Conference. American Society of Mechanical Engineers, Montreal, QB, Canada, 29 September–2 October 2002; pp. 35–41.
- Culpepper, M.L.; Anderson, G. Design of a low-cost nano-manipulator which utilizes a monolithic, spatial compliant mechanism. Precis. Eng. 2004, 28, 469–482. [Google Scholar] [CrossRef]
- Kang, B.H.; Wen, J.Y.; Dagalakis, N.G.; Gorman, J.J. Analysis and design of parallel mechanisms with flexure joints. IEEE Trans. Robot. 2005, 21, 1179–1185. [Google Scholar] [CrossRef]
- Chen, W.J.; Lin, W.; Low, K.; Yang, G. A 3-DOF flexure-based fixture for passive assembly of optical switches. In Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Monterey, CA, USA, 24–28 July 2005; pp. 618–623.
- Tang, X.; Chen, I.M. A large-displacement and decoupled XYZ flexure parallel mechanism for micromanipulation. In Proceedings of the IEEE International Conference on Automation Science and Engineering, Shanghai, China, 8–10 October 2006; pp. 75–80.
- Lobontiu, N. Compliant Mechanisms: Design of Flexure Hinges; CRC Press: Boca Raton, FL, USA, 2002. [Google Scholar]
- Ouyang, P.; Tjiptoprodjo, R.; Zhang, W.; Yang, G. Micro-motion devices technology: The state of arts review. Int. J. Adv. Manuf. Technol. 2008, 38, 463–478. [Google Scholar] [CrossRef]
- Yong, Y.K.; Aphale, S.S.; Moheimani, S.R. Design, identification, and control of a flexure-based XY stage for fast nanoscale positioning. IEEE Trans. Nanotechnol. 2009, 8, 46–54. [Google Scholar] [CrossRef]
- Yao, Q.; Dong, J.; Ferreira, P.M. Design, analysis, fabrication and testing of a parallel-kinematic micropositioning XY stage. Int. J. Mach. Tools Manuf. 2007, 47, 946–961. [Google Scholar] [CrossRef]
- Li, Y.M.; Xu, Q. A novel design and analysis of a 2-DOF compliant parallel micromanipulator for nanomanipulation. IEEE Trans. Autom. Sci. Eng. 2006, 3, 247–254. [Google Scholar]
- Li, Y.M.; Huang, J.M.; Tang, H. A compliant parallel XY micromotion stage with complete kinematic decoupling. IEEE Trans. Autom. Sci. Eng. 2012, 9, 538–553. [Google Scholar] [CrossRef]
- Bhagat, U.; Shirinzadeh, B.; Clark, L.; Qin, Y.; Tian, Y.; Zhang, D. Experimental investigation of robust motion tracking control for a 2-DOF flexure-based mechanism. IEEE/ASME Trans. Mechatron. 2014, 19, 1737–1745. [Google Scholar] [CrossRef]
- Bhagat, U.; Shirinzadeh, B.; Clark, L.; Chea, P.; Qin, Y.; Tian, Y.; Zhang, D. Design and analysis of a novel flexure-based 3-DOF mechanism. Mech. Mach. Theory 2014, 74, 173–187. [Google Scholar] [CrossRef]
- Li, Y.M.; Xu, Q. Design and analysis of a totally decoupled flexure-based XY parallel micromanipulator. IEEE Trans. Robot. 2009, 25, 645–657. [Google Scholar]
- Hao, G.; Kong, X. A novel large-range XY compliant parallel manipulator with enhanced out-of-plane stiffness. J. Mech. Des. 2012, 134, 061009. [Google Scholar] [CrossRef]
- Hao, G. A 2-legged XY parallel flexure motion stage with minimised parasitic rotation. J. Mech. Eng. Sci. 2014, 203, 1989–1996. [Google Scholar] [CrossRef]
- Awtar, S.; Slocum, A.H. Constraint-based design of parallel kinematic XY flexure mechanisms. J. Mech. Des. 2007, 129, 816–830. [Google Scholar] [CrossRef]
- Zhang, X.; Xu, Q. Mechanism design of a compact XYZ parallel flexure stage. In Proceedings of the IEEE International Conference on Information and Automation, Lijiang, China, 8–10 August 2015; pp. 953–957.
- Lobontiu, N.; Garcia, E. Analytical model of displacement amplification and stiffness optimization for a class of flexure-based compliant mechanisms. Comput. Struct. 2003, 81, 2797–2810. [Google Scholar] [CrossRef]
- Kim, J.H.; Kim, S.H.; Kwak, Y.K. Development and optimization of 3-D bridge-type hinge mechanisms. Sens. Actuators A Phys. 2004, 116, 530–538. [Google Scholar] [CrossRef]
- Yi, B.J.; Chung, G.B.; Na, H.Y.; Kim, W.K.; Suh, I.H. Design and experiment of a 3-DOF parallel micromechanism utilizing flexure hinges. IEEE Trans. Robot. Autom. 2003, 19, 604–612. [Google Scholar]
- Yong, Y.K.; Lu, T.F.; Handley, D.C. Review of circular flexure hinge design equations and derivation of empirical formulations. Precis. Eng. 2008, 32, 63–70. [Google Scholar] [CrossRef]
- Hale, L.C. Principles and Techniques for Designing Precision Machines. Ph.D. Thesis, Department of Mechanical Engineering, Massachusetts Institute of Technology, Cambridge, MA, USA, 1999. [Google Scholar]
- Ding, B.; Li, Y.M. Design and analysis of a decoupled XY micro compliant parallel manipulator. In Proceedings of the IEEE International Conference on Robotics and Biomimetics (ROBIO), Bali, Indonesia, 5–10 December 2014; pp. 1898–1903.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| r | t | h | w |
|---|---|---|---|
| 3 | 0.5 | 8 | 12.7 |
| Performance | Input Stiffness (N/m) | Amplification Ratio |
|---|---|---|
| Finite-Element Analysis (FEA) | 4.22 | 7.5 |
| Performance | Input Stiffness (N/m) | Amplification Ratio |
|---|---|---|
| one-stage amplifier | 4.22 | 7.5 |
| two-stage amplifier | 9.77 | 15.5 |
| Structure Parameters (mm) | ||||
|---|---|---|---|---|
| 78.5 | 89 | 102 | 86 | 98.5 |
| 115 | 24 | 26 | 10 | 68 |
| Material Parameters | ||||
| Young’s Modulus | Yield Strength | Poisson’s Ratio | Density | |
| 71.7 GPa | 503 MPa | 0.33 | 2810 Kg/m | |
| Items | Output Compliance (/N) | Input Stiffness (N/m) | Amplification Ratio |
|---|---|---|---|
| Matrix model | 1.02 | 12.7 | 13.5 |
| FEA | 0.94 | 13.22 | 12.5 |
| Deviation | 7.8 | 4.1 | 7.4 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, X.; Li, Y. Design and Analysis of a New High Precision Decoupled XY Compact Parallel Micromanipulator. Micromachines 2017, 8, 82. https://doi.org/10.3390/mi8030082
Chen X, Li Y. Design and Analysis of a New High Precision Decoupled XY Compact Parallel Micromanipulator. Micromachines. 2017; 8(3):82. https://doi.org/10.3390/mi8030082
Chicago/Turabian StyleChen, Xigang, and Yangmin Li. 2017. "Design and Analysis of a New High Precision Decoupled XY Compact Parallel Micromanipulator" Micromachines 8, no. 3: 82. https://doi.org/10.3390/mi8030082
APA StyleChen, X., & Li, Y. (2017). Design and Analysis of a New High Precision Decoupled XY Compact Parallel Micromanipulator. Micromachines, 8(3), 82. https://doi.org/10.3390/mi8030082