1. Introduction
In the past several years, mobile target localization in an enclosed environment has received a lot of attention in many fields, such as indoor pedestrian navigation [
1], coal mine automation [
2], mobile robot navigation, and other fields. Moreover, wireless sensor network (WSN) has enormous potential for short-range positioning in an enclosed environment based on intelligence, networking, and distribution. WSN is comprised of a mobile node and multiple anchor nodes through a self-organized multi-hop. Anchor nodes detect the wireless signal, which is transmitted by mobile node; however, the wireless signal is liable to be influenced by the barrier, floor, and ceiling through multipath wireless channels and non-line-of-sight (NLOS) [
3]. Among them, the barrier causes the most serious influence. It can block the wireless signal and cause gross error or non-measurement for some anchor nodes. Gharghan et al. [
4] proposed a measured distance model between the mobile node and anchor node and improved the distance estimation accuracy with log-normal shadowing algorithm. Typically, the WSN cannot calculate the accurate position based on the low-accuracy distance estimation. If the number of anchor nodes that have received the wireless signal from the mobile node is less than four on a two-dimensional plane, the WSN cannot solve a final position result using the time of arrival (TOA) model.
In contrast to WSN, the strapdown inertial navigation system (SINS) can provide continuous positioning information by processing inertial measurement unit (IMU) measurements without any external aids after the required initialization and alignment [
5]. The SINS can express the ability of independent positioning and is used in many fields such as military arms, aerospace, indoor mobile tracking [
6], and so on. However, the positioning accuracy of SINS degrades rapidly over time due to integration with IMU measured errors, especially for low-cost IMUs [
7]. Sensor errors of IMU can be easily parameterized, but can only be precisely estimated and compensated using external information, such as GPS observations for outdoors or WSN measurements for indoors [
8]. Therefore, considerable research effort has been focused on the SINS/WSN integrated positioning system recently. Hur [
9] has built the IMU/WSN localization model with discrete-time for a mobile robot. Correa [
10] have developed an enhanced extended Kalman filter (EKF) method for indoor positioning H
∞ filter applications using WSN and IMU. Yang [
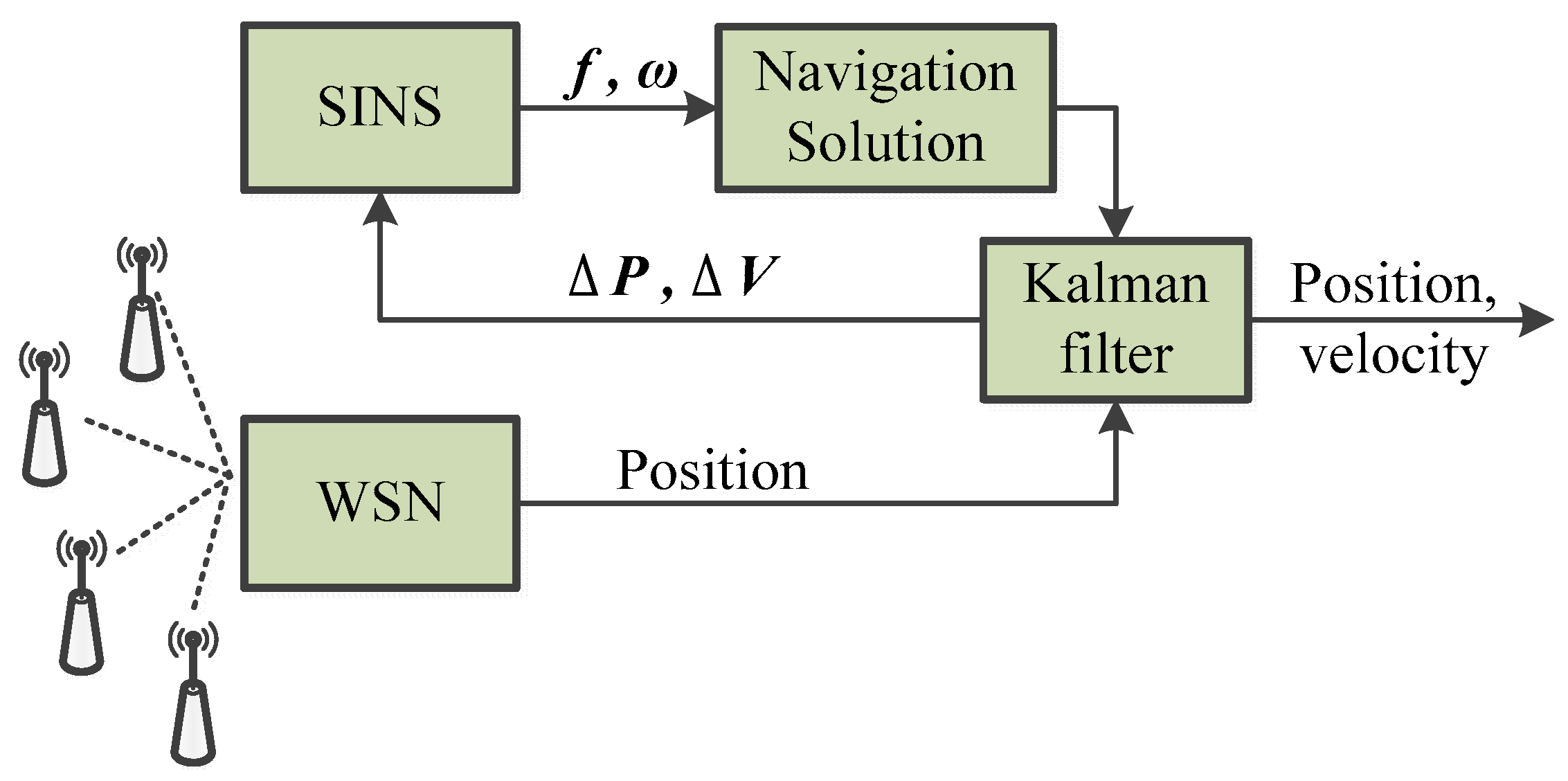
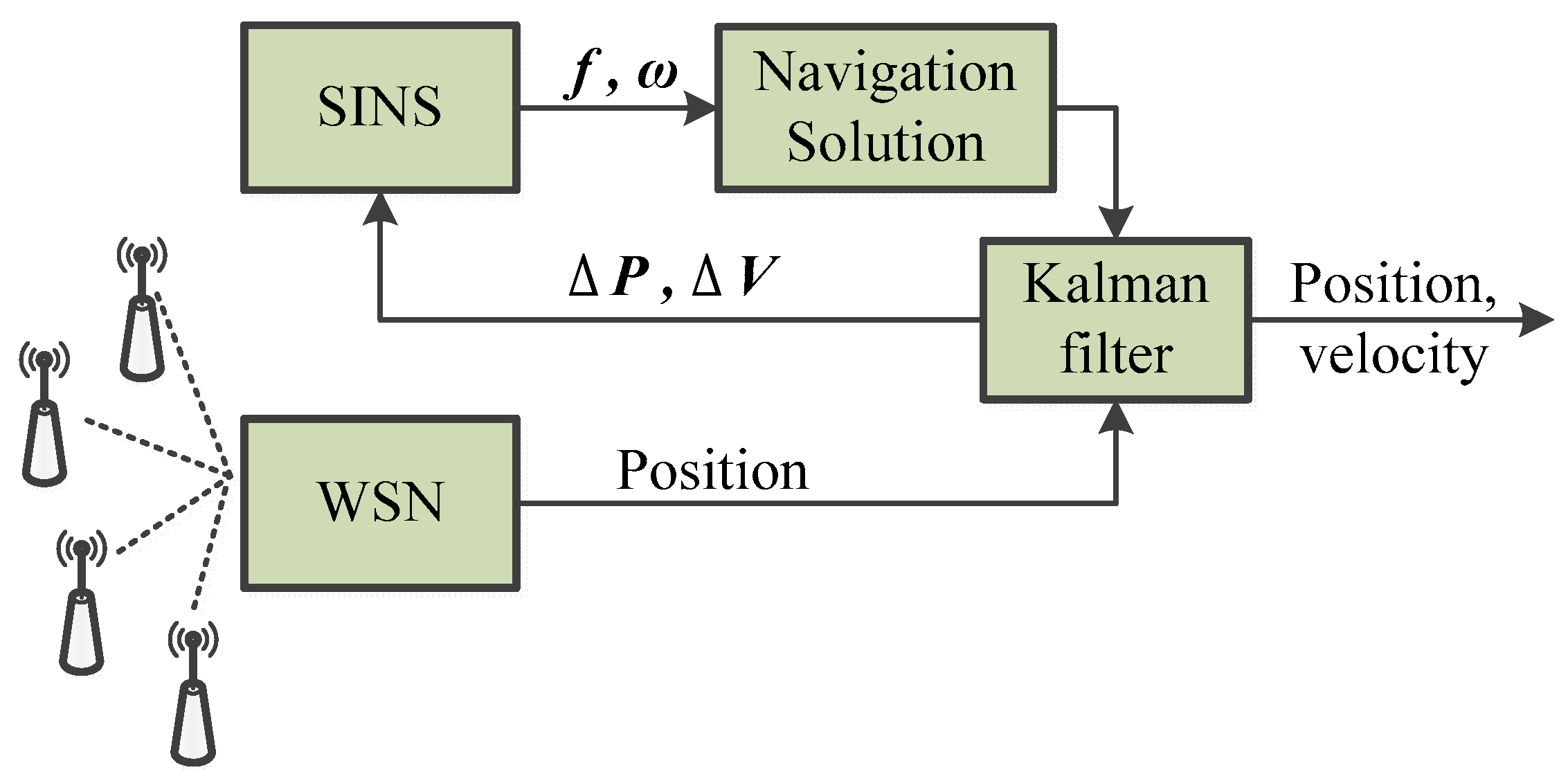
11] proposed a fuzzy adaptive Kalman filter positioning system based on INS and WSN integration to estimate the position of a mobile target indoors. However, for the above methods, the WSN and SINS work independently and the fusion model combines their positions and velocities, if the WSN finishes calculating the effective position. Otherwise, the integrated positioning system will result in failure by means of the positions of WSN and SINS, when the WSN does not calculate the accurate position. That integrated method has been defined as a loosely-coupled integrated method according to [
12].
In order to overcome the poor observability of measurement information for loosely-coupled integration, Ascher [
13] proposed a tightly-coupled UWB/INS system for pedestrian indoor applications. Xu [
14] has built a tightly-coupled integrated model with a Kalman filter (KF) for the INS/WSN system. The above integrated positioning systems based on a tightly-coupled integration scheme utilize the differences between the distances from the mobile node to the anchor nodes measured by SINS and those measured by WSN. However, their positioning accuracies are highly dependent on the accuracy of the distances measured, and differences are used as the measurement information for KF. Note that the measurement errors of WSN can deteriorate the overall positioning accuracy. Additionally, the tightly-coupled integrated system can be improved by the provision of more accurate measured distances through correcting the residual correlated errors. Dwivedi [
15] estimated clock errors and range between two nodes simultaneously. Miloccol [
16] proposed an efficient pseudo-optimal low-power based distance estimation method for the measured distance error of WSN. Go [
17] and Li [
18] discussed the accuracy of wireless localization, which is influenced by NLOS errors in WSN. However, the above proposed methods involve very complicated calculations and cannot be used directly for the integrated positioning system.
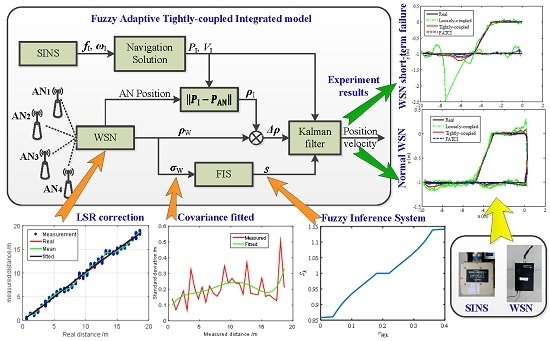
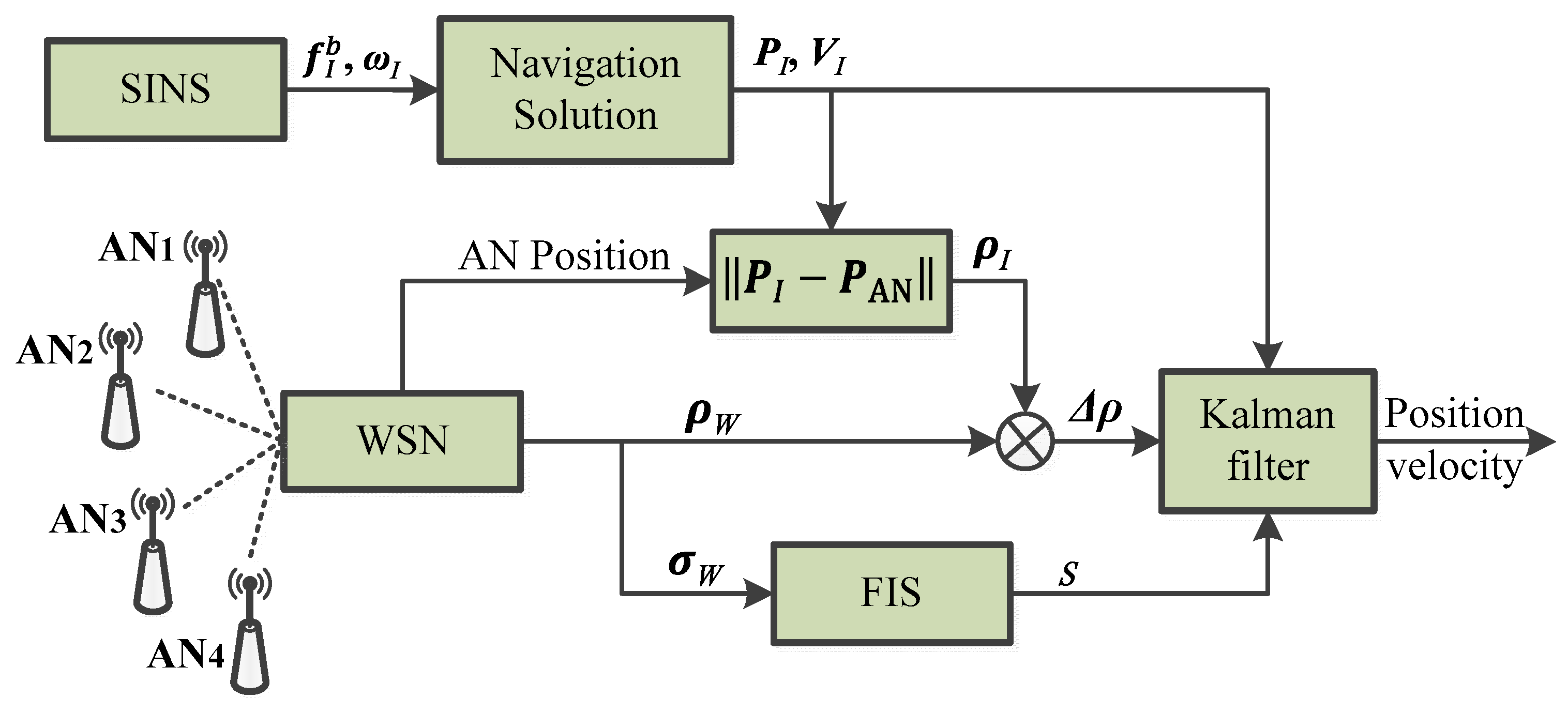
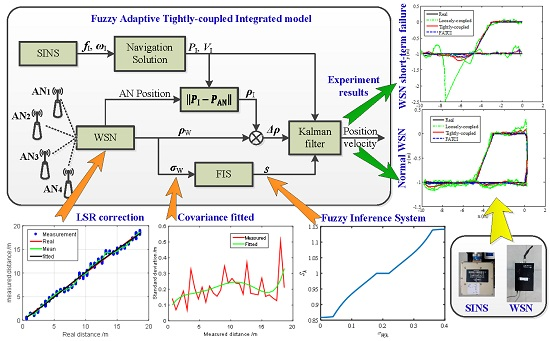
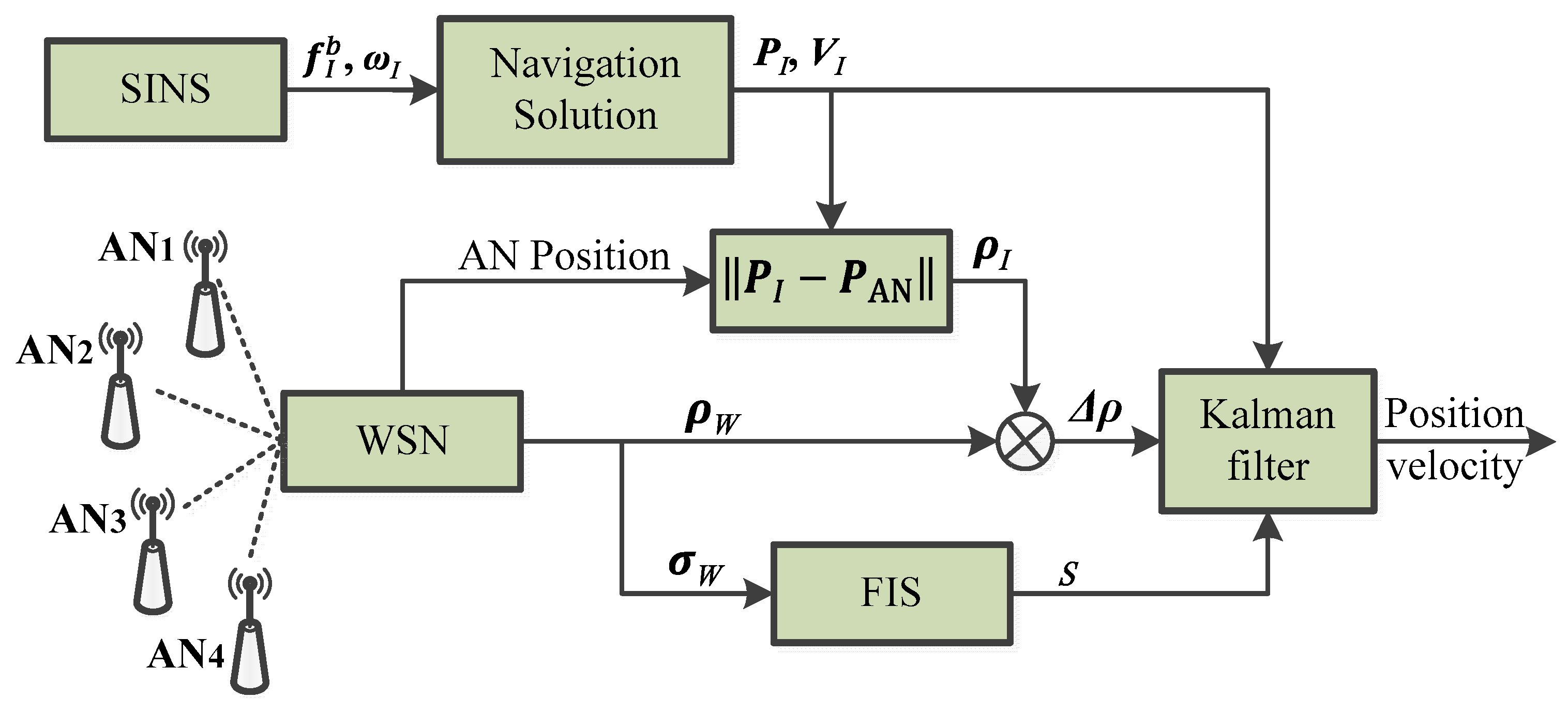
As for the tightly-coupled integrated positioning model, the statistical covariance of observation noise can reflect the measured accuracy for the distance between anchor node and mobile node. Meanwhile, the accuracy of the measured distance is certainly one deciding factor for the performance of a tightly-coupled integration model. However, the estimated accuracy for the distance between the mobile node and anchor node will be changed based on the varied real distance. Every anchor node reads the distances with different estimated accuracies according to the varied actual distances from the mobile node to every anchor node. Aiming at different measured accuracies for WSN, this paper proposed a fuzzy adaptive tightly-coupled integration (FATCI) positioning system based on the distance statistical covariance matrix with a fuzzy adaptive Kalman filter (FAKF). The tightly-coupled integrated positioning model is built through analyzing the loosely-coupled integrated model with SINS/WSN. Moreover, the error-corrected model for measured distance is built according to the basic operating principles of WSN. The fuzzy adaptive control strategy is configured to take advantage of the statistical information of the measured distance. As a consequence, the measurement covariance matrix of Kalman filter is tuned with the accuracy of measured distance. In this case, the confidence coefficient for every measurement is adjusted based on the fuzzy inference system. Then the FATCI model with SINS/WSN systems would be achieved.
The rest of the paper is organized as follows. The problem statement for loosely-coupled integrated model is presented in
Section 2.
Section 3 describes a model-updated algorithm for measured distance error based on the least squares regression, while
Section 4 represents a FATCI model using the SINS/WSN system. In
Section 5, we examine the performance of the proposed method and compare it to loosely-coupled and traditional tightly-coupled models. Finally,
Section 6 concludes the paper.
5. Experiments
In this section, the performance of proposed tightly-coupled integrated positioning system was evaluated. Firstly, the experimental platform for the SINS/WSN integrated positioning system was built using MEMS-based IMU and WSN with chirp spread spectrum (CSS) technology. The MEMS-based IMU have the advantages of small size, data stabilization, and low cost compared with other IMUs for mobile target localization in the enclosed environment. CSS signal of WSN can be used for the localization in indoor facilities and coal mine with some advantages, such as high temporal resolution, anti-multipath capability, high data rate, low power, and so on. Furthermore, some tests for the SINS/WSN experimental platform can be implemented based on the loosely-coupled integration and tightly-coupled integration, as well as the FATCI models.
5.1. Experimental Setup
In order to implement the experiments, an electric vehicle has been used as the mobile target. The initial parameters of the positioning system were given as:
- (1)
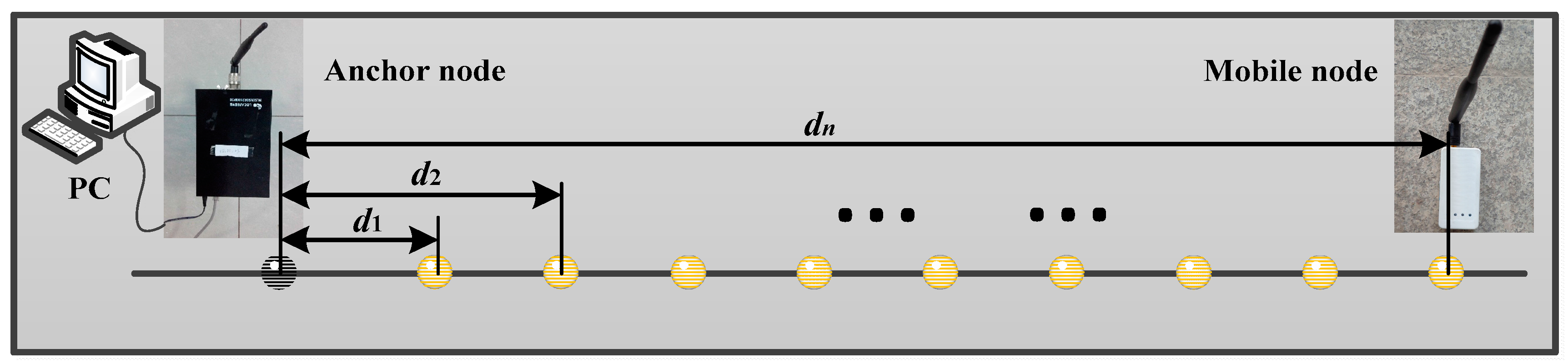
The WSN consisted of four anchor nodes and a mobile node. The mobile node was placed on the mobile vehicle and the anchor nodes were deployed along the corridor. A long and narrow location area held four anchor nodes. Time synchronization for TOA approach among the anchor nodes can be accomplished through the Ethernet cable connection. The power was supplied for the anchor nodes through the twisted pair and the mobile node was operated from batteries. The sampling period of WSN was 0.1 s.
- (2)
The chosen SINS is a six-degrees-of-freedom (6DoF) Inertial Measurement Unit providing accurate monitoring of angular rate and linear acceleration in any orientation. The IMU incorporates advanced MEMS rate gyro technology resulting in exceptional reliability and performance, with in-run bias stability of <3°/h. Typical applications include platform stabilization, dynamic testing, and avionics. The acceleration resolution is less than 1/2000 of the absolute value of the gravitational acceleration. The RS232 serial communication was used only for data transmission between IMU and computer. The baud rate was 115,200 bit/s, and the sampling period was 0.01 s. The power was supplied for the SINS through a storage battery in the electric vehicle.
- (3)
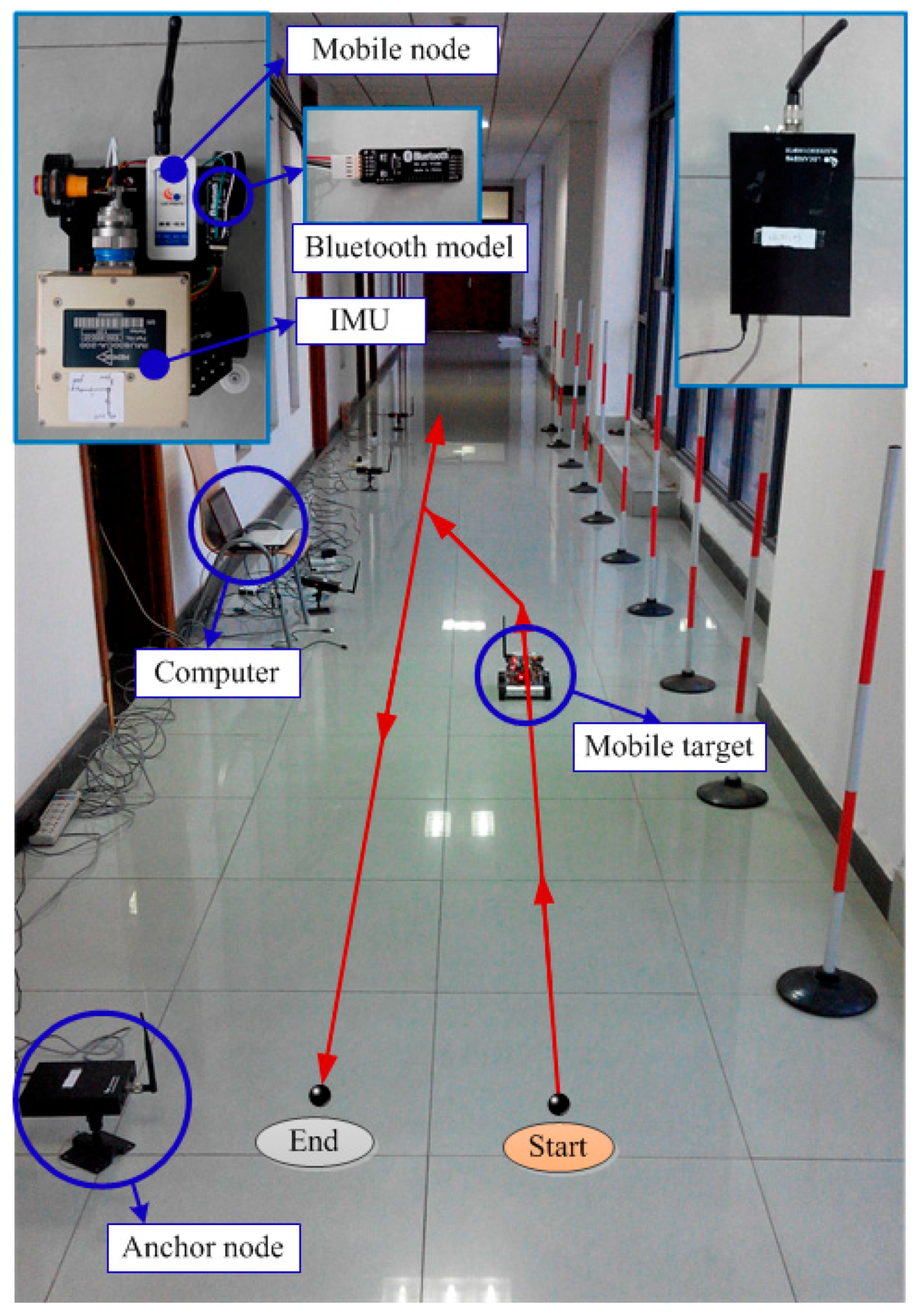
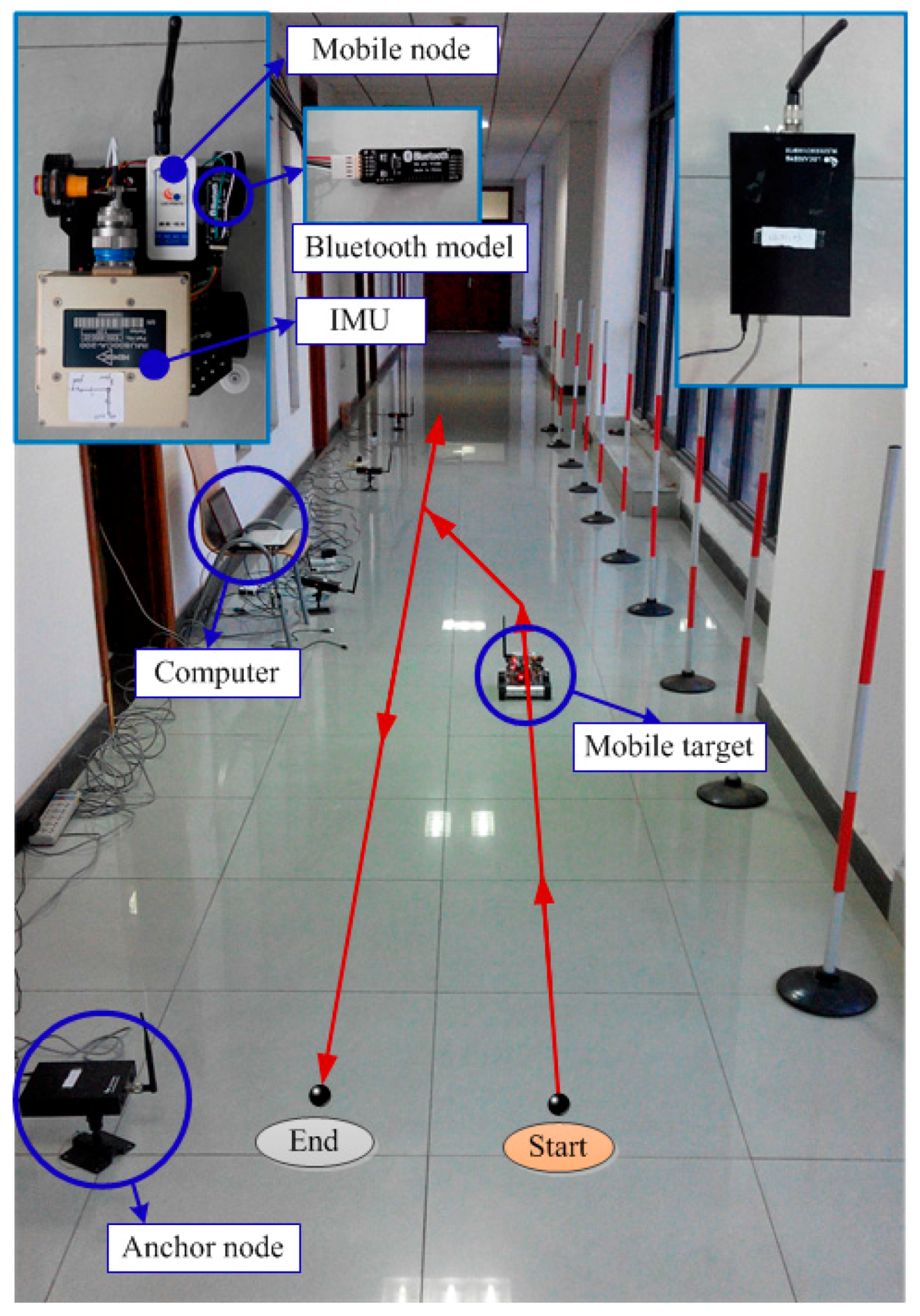
The IMU was installed on the mobile vehicle and the inertial data was transported with two Bluetooth models. One Bluetooth model was connected to the IMU with RS232 ribbon cable, the other was connected to the computer by a wired USB–serial connection (Bluetooth 1.1 and USB 2.0). The maximum received distance between two Bluetooth models is up to 60 m in ideal conditions (free space). The wireless signal was broadcasted by the mobile node in real time and received by the anchor nodes. The distance values between the mobile node and anchor nodes were firstly collected by anchor nodes and then forwarded to the switch, which was connected to a computer via an Ethernet cable. Additionally, the inertial data of IMU and the distance value of WSN were used to calculate the fusion center, which was a computer. As a consequence, the position and attitude of the mobile vehicle were obtained by means of the integration algorithm.
Figure 9 shows an experimental diagram of an integrated positioning system with SINS/WSN.
The starting point of a mobile vehicle was set as (0, 0) m. The trajectory of the mobile vehicle is shown as the red line in
Figure 9. The experiment lasted 60 s.
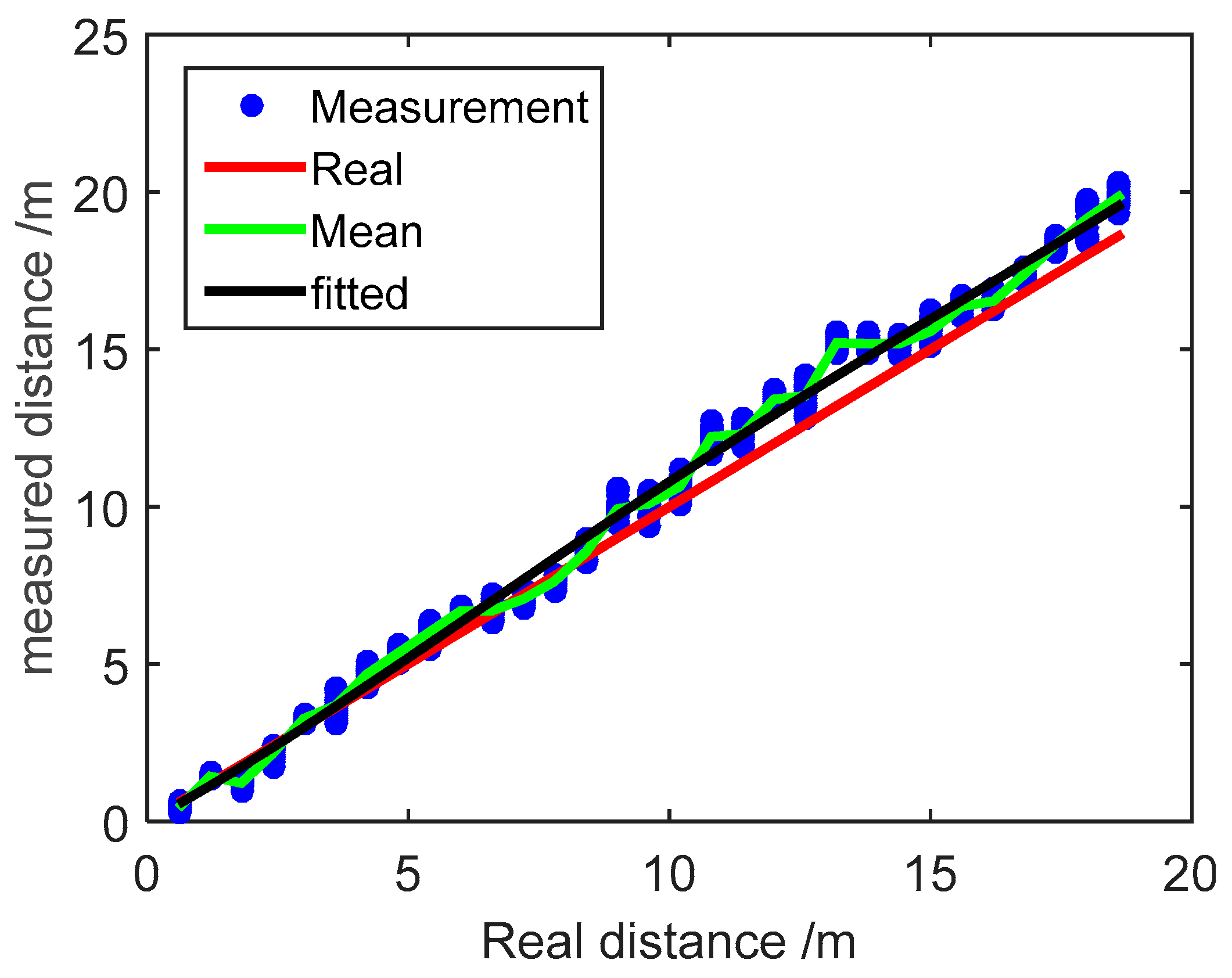
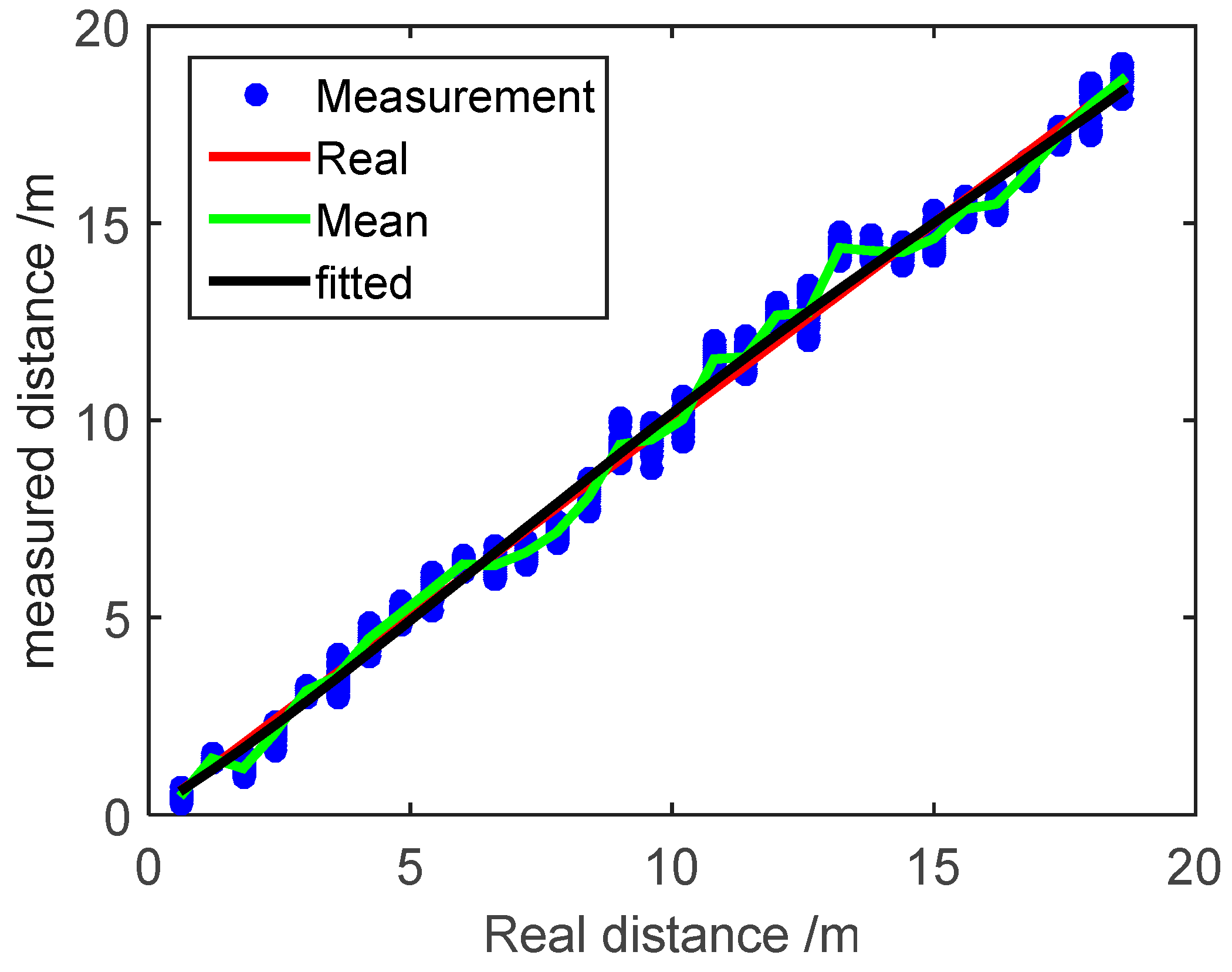
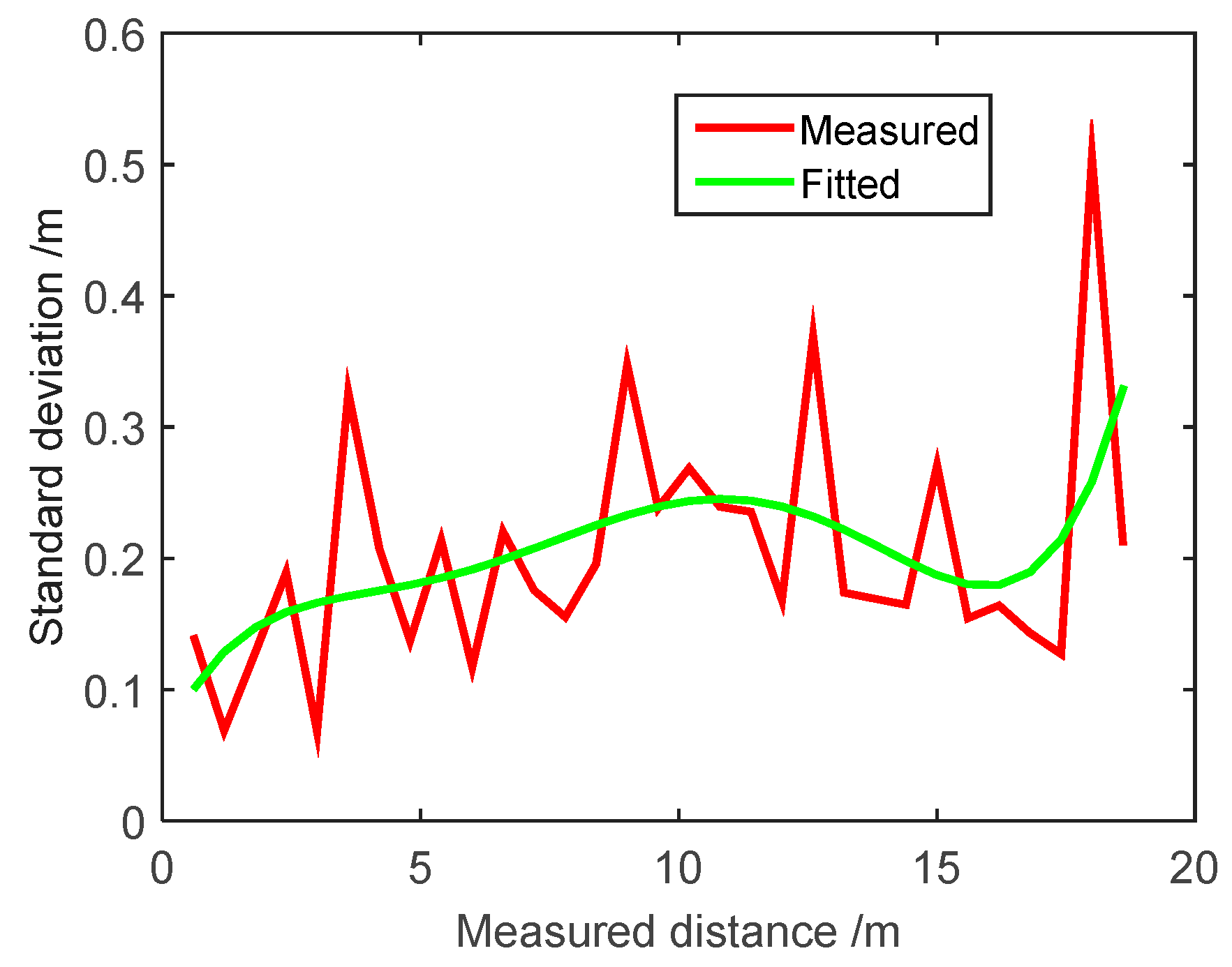
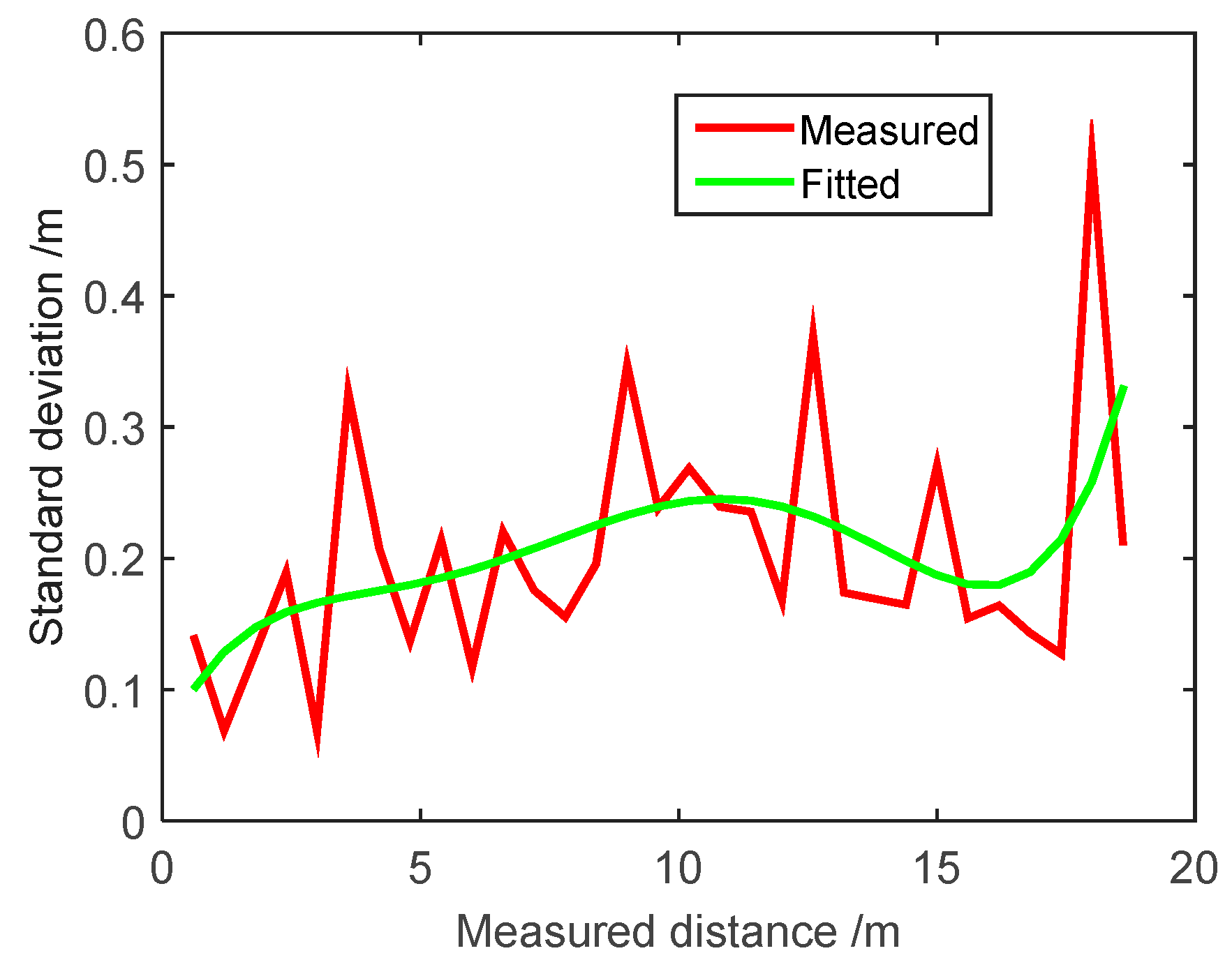
5.2. LSR Correction Model for WSN Measured Distance
Note that the distance measurement accuracy of WSN was able to influence the positioning accuracy for the SINS/WSN integrated system. According to the error correction model for measured distance that is proposed in
Section 3.2, the LSR correction model for WSN can be used to evaluate positioning performance based on the WSN-only experimental platform.
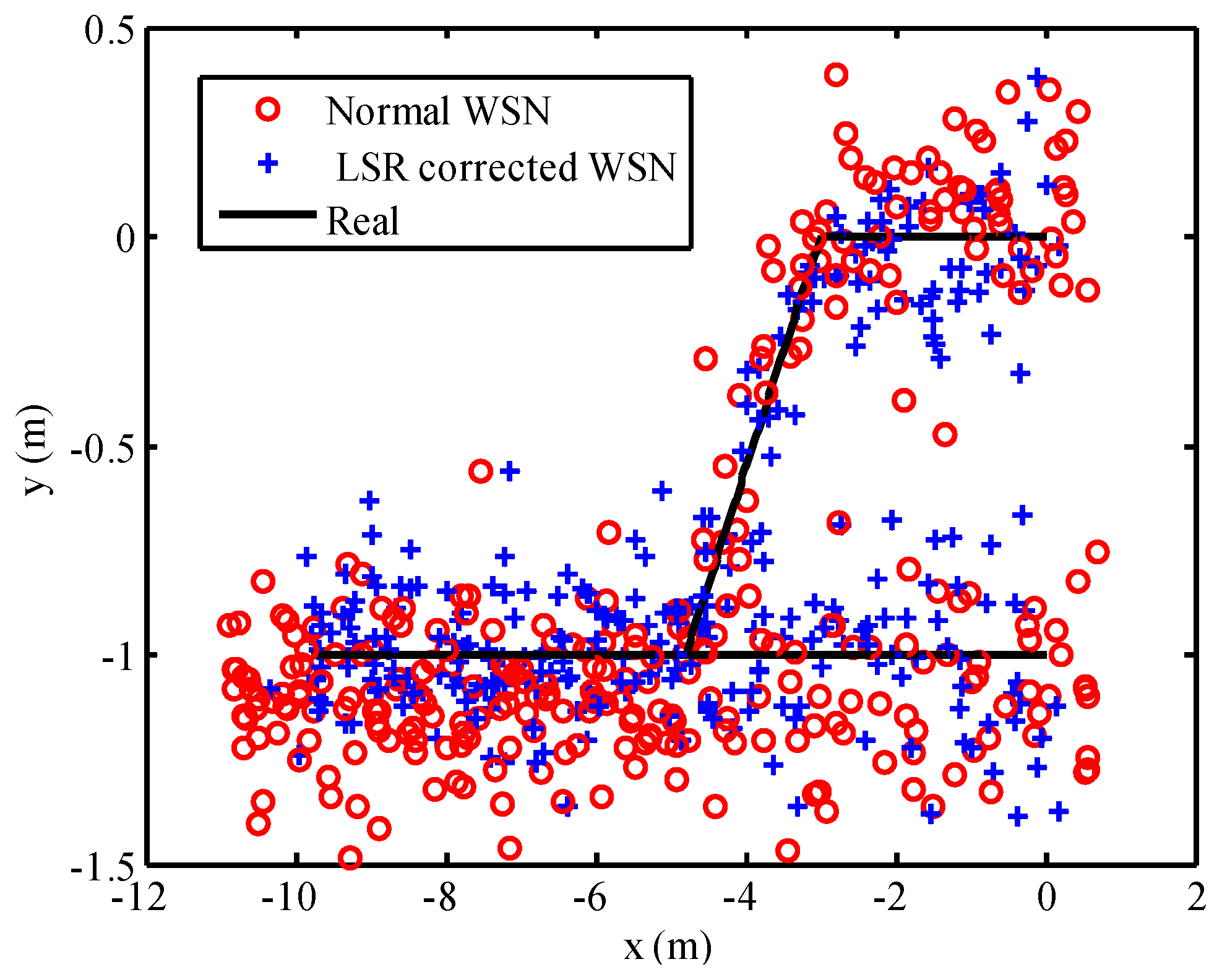
Anchor nodes received the wireless signal from the mobile node that was installed on the mobile vehicle. The TOA-based measured distance value can be calculated by a programmable control unit in the anchor node. Using the LSR correction model for the measured distance, the measurement error of anchor nodes was corrected and the positioning results of WSN are presented in
Figure 10. Red circles represented the positioning result of uncorrected WSN, which applied to the original measured distance readings. Meanwhile, the positioning result corrected by the LSR correction model was represented as blue crosses. There are a large number of red circles defecting from the general trajectory in
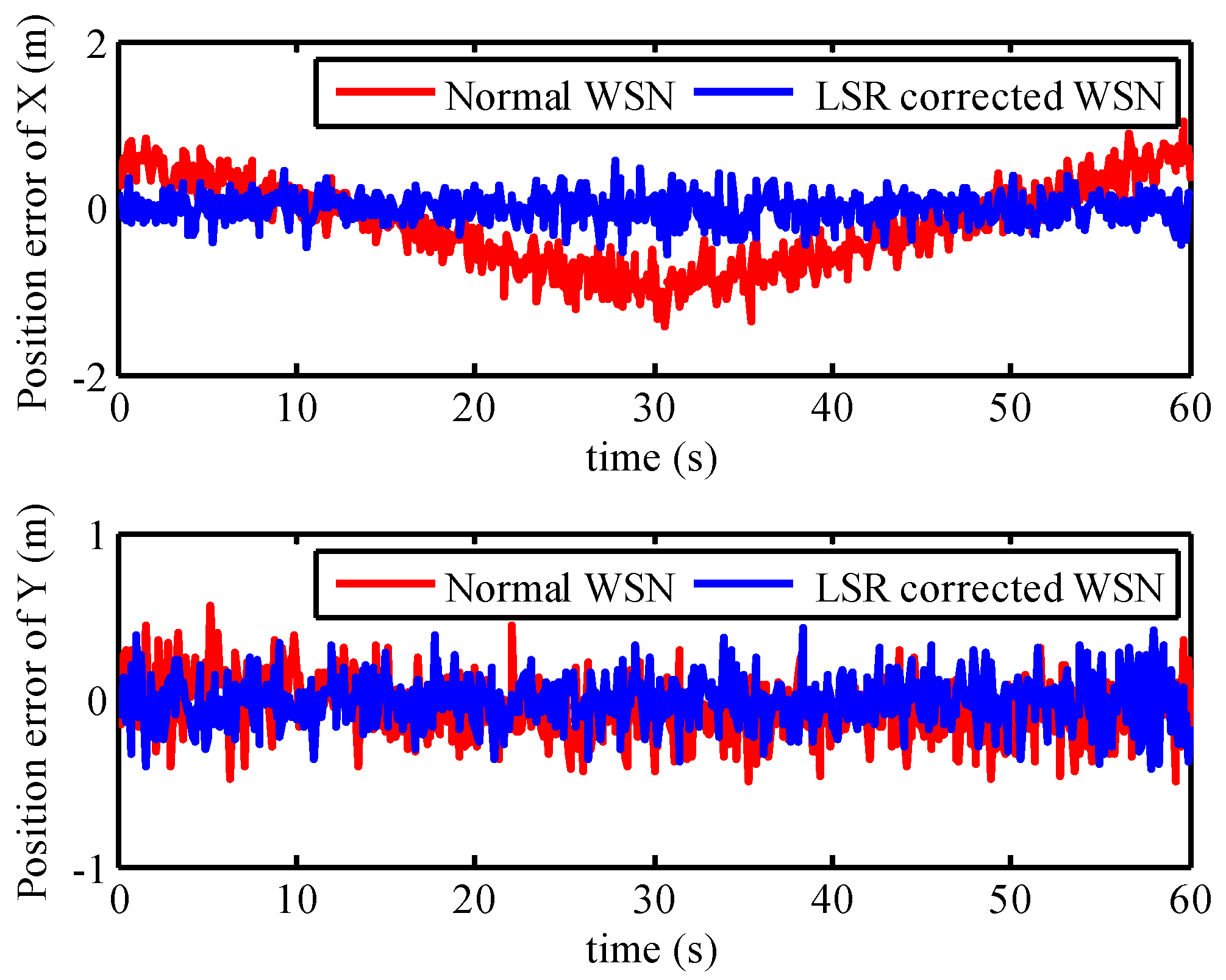
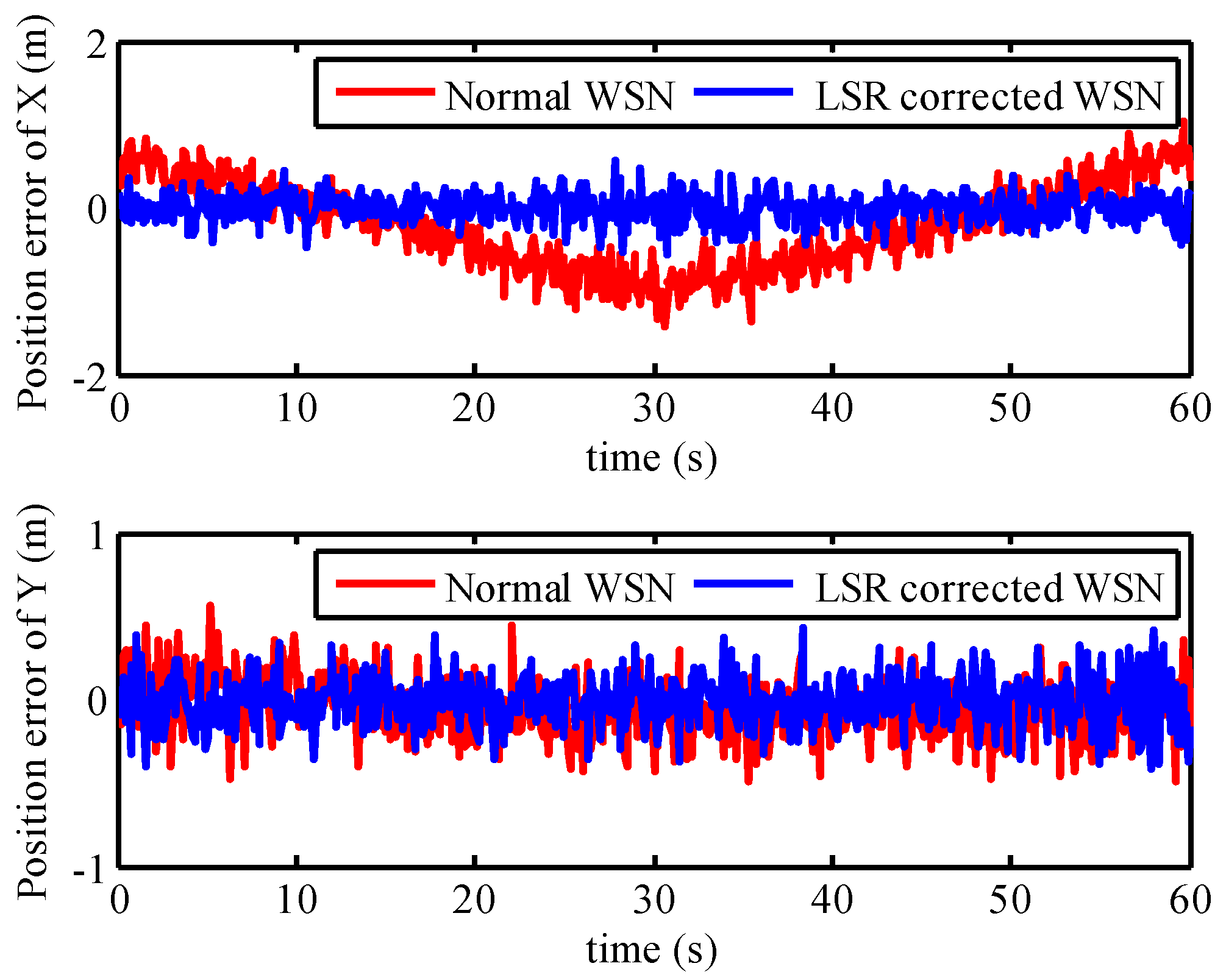
Figure 10. Furthermore, the red circles deviated from the black line more seriously than the blue crosses near the point (−10, −1) m. The position errors of WSN with the uncorrected model and LSR correction model are plotted in
Figure 11. From this figure, it is obvious that the position errors with uncorrected WSN were composed of the systematic error and stochastic error, where the systematic error changed over time. However, the position error of WSN updated by the LSR has little systematic error. The maximum position error and its variance with uncorrected WSN were 1.26 m and 0.2618, respectively. On the contrary, the maximum position error and its variance with LSR correction algorithm were 0.55 m and 0.0261, respectively. Note that, in this case, the positioning accuracy of WSN with LSR correction model is much higher than that with uncorrected WSN, after we took into account the position error and its variance. This explains why the LSR correction model can decrease the positioning error of WSN.
5.3. Loosely-Coupled Integration Result
Combined with the positioning result of WSN with LSR correction model, the loosely-coupled integrated model was built based on the position and attitude of SINS. The loosely-coupled integrated model has been described in
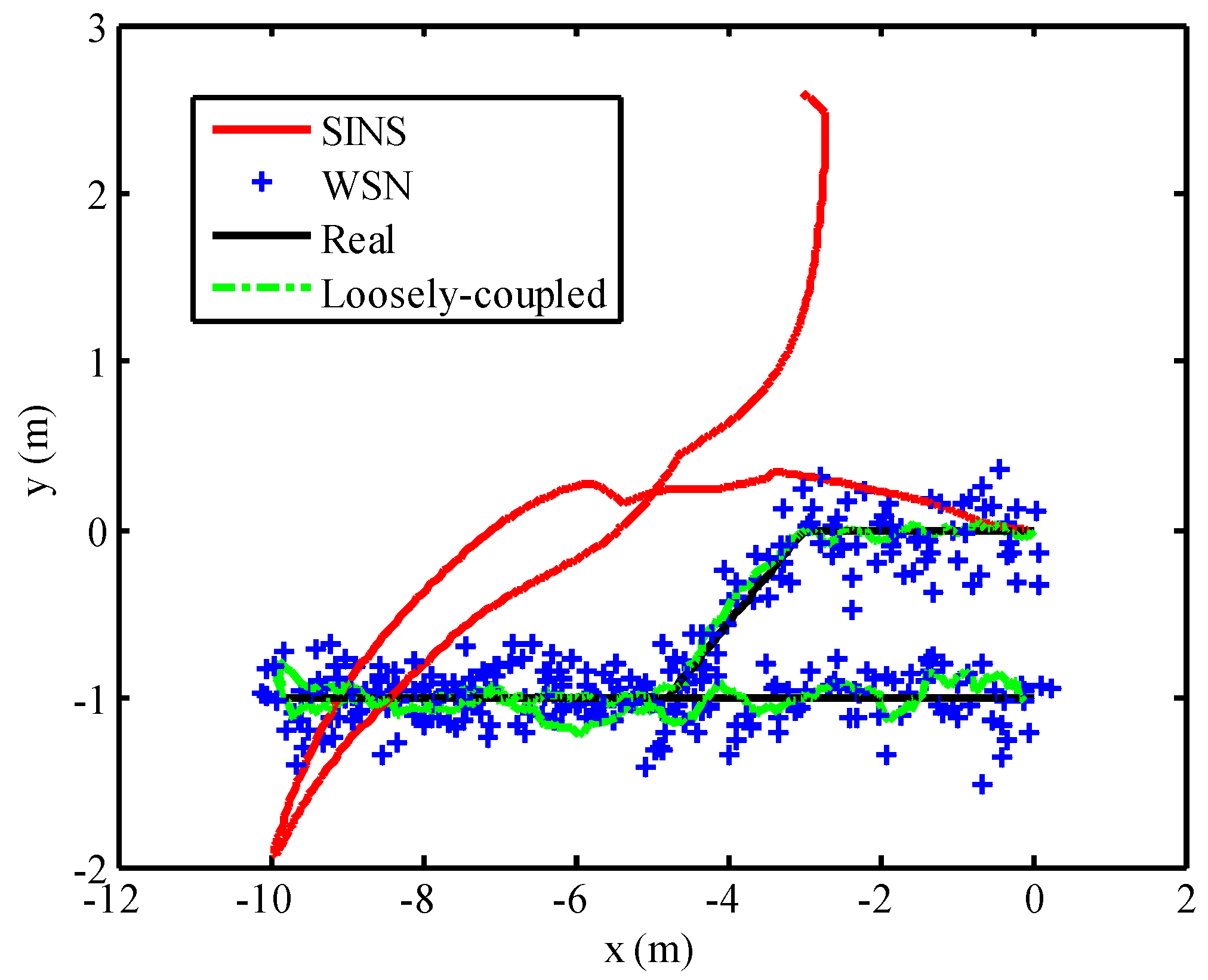
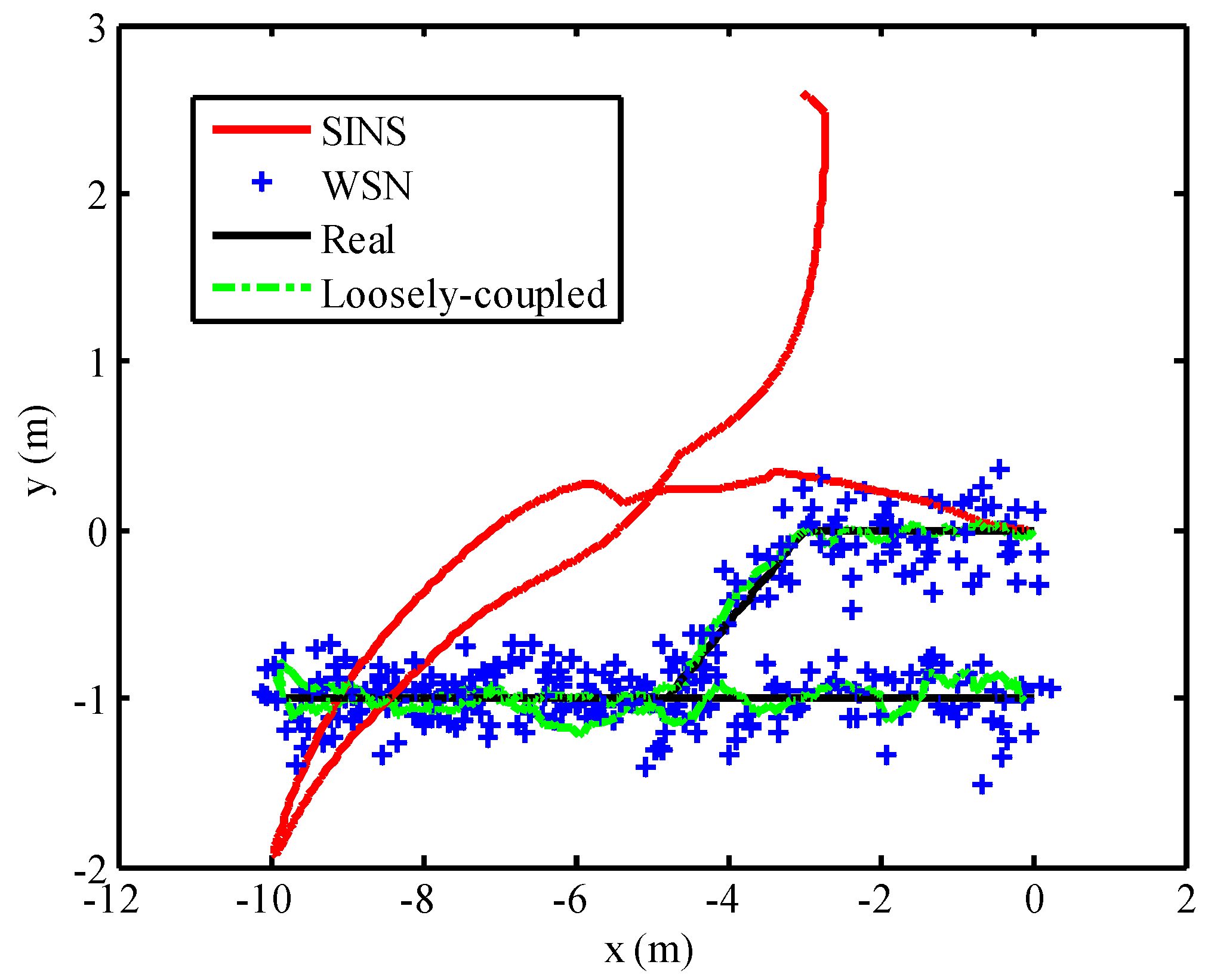
Section 2. In order to analyze the positioning performance of the loosely-coupled integrated model with SINS/WSN system, the fusion result of loosely-coupled integrated model is depicted in
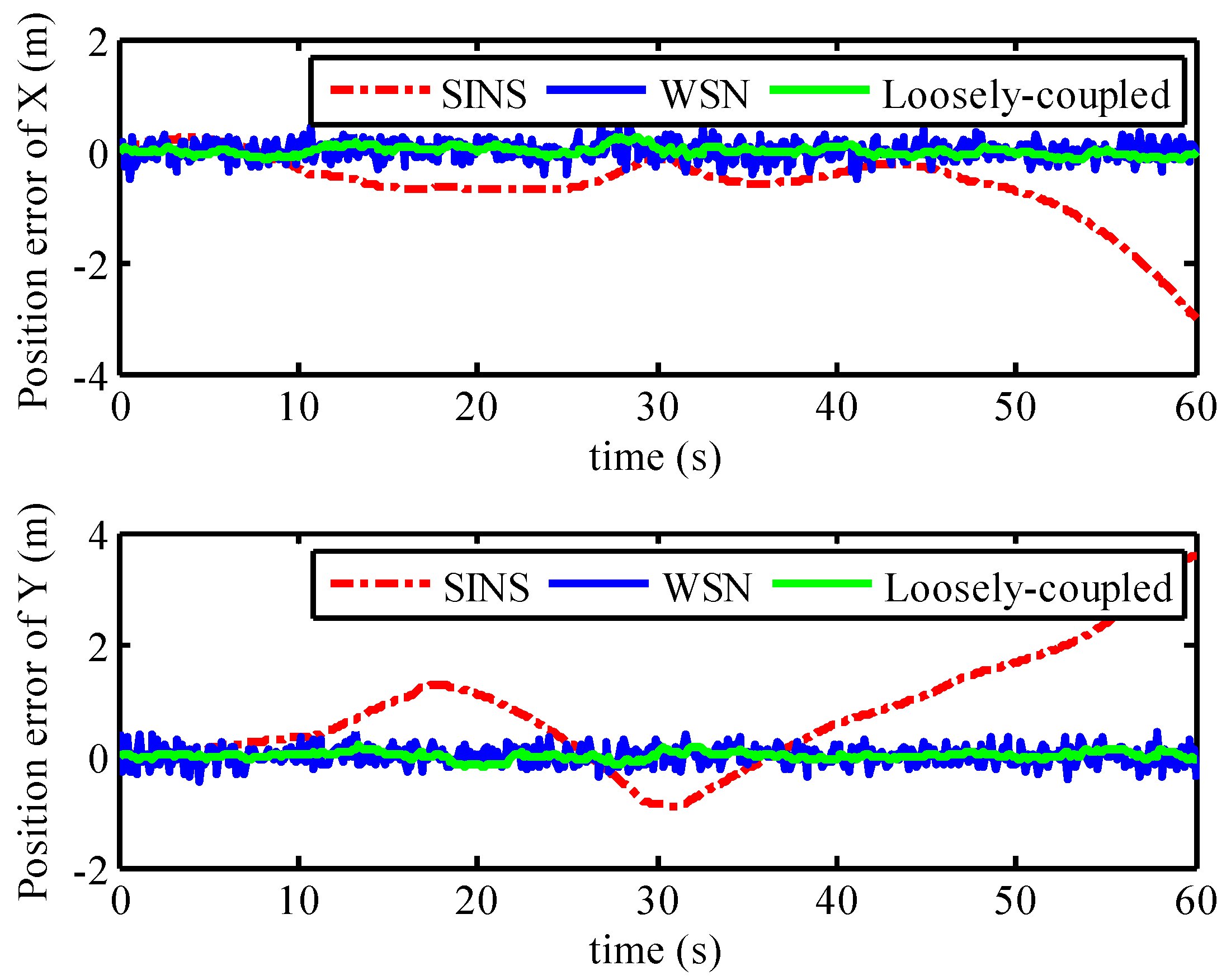
Figure 12, combined with the positions using SINS-only and WSN-only. The positioning result of WSN with the LSR correction model was represented as a series of blue crosses. The result of pure SINS, expressed as a red line, already experienced drifted position error after the mobile target started to move. The position error of SINS became seriously divergent as time went by; however, the position result of WSN experienced stochastic error but not drifted error. The positioning result of the loosely-coupled integration model is expressed as a green line and can track the real trajectory effectively with small position error. The position error of the SINS/WSN loosely-coupled integrated model is shown in
Figure 13. Obviously, the positioning accuracy of the loosely-coupled integrated positioning system was better than that of the SINS and WSN.
5.4. FATCI Model with WSN Short-Term Failure
Note that the SINS/WSN loosely-coupled integrated positioning system has the better tracking accuracy, compared with the single operation of SINS and WSN. However, the loosely-coupled integrated model that observed the final position of WSN will lead to the failure of the integrated model when the WSN cannot calculate the position of a mobile target. Because of the failure or sheltered barrier for the anchor node, the number of anchor nodes that can receive the wireless signal was less than four on a two-dimensional plane. In order to evaluate the positioning performance with loosely-coupled integration and tightly-coupled integration, as well as the FATCI algorithms for WSN short-term failure, we interrupted the measured distance value of second anchor node in the process of motion. The failure time of the second anchor node was set from 18 s to 23 s, as well as from 40 s to 45 s. Then the final position of WSN cannot be obtained during these two time segments except for the measured distance values from other anchor nodes. The traditional tightly-coupled positioning model cannot adjust the measurement covariance error matrix based on the measuring accuracy of every anchor node.
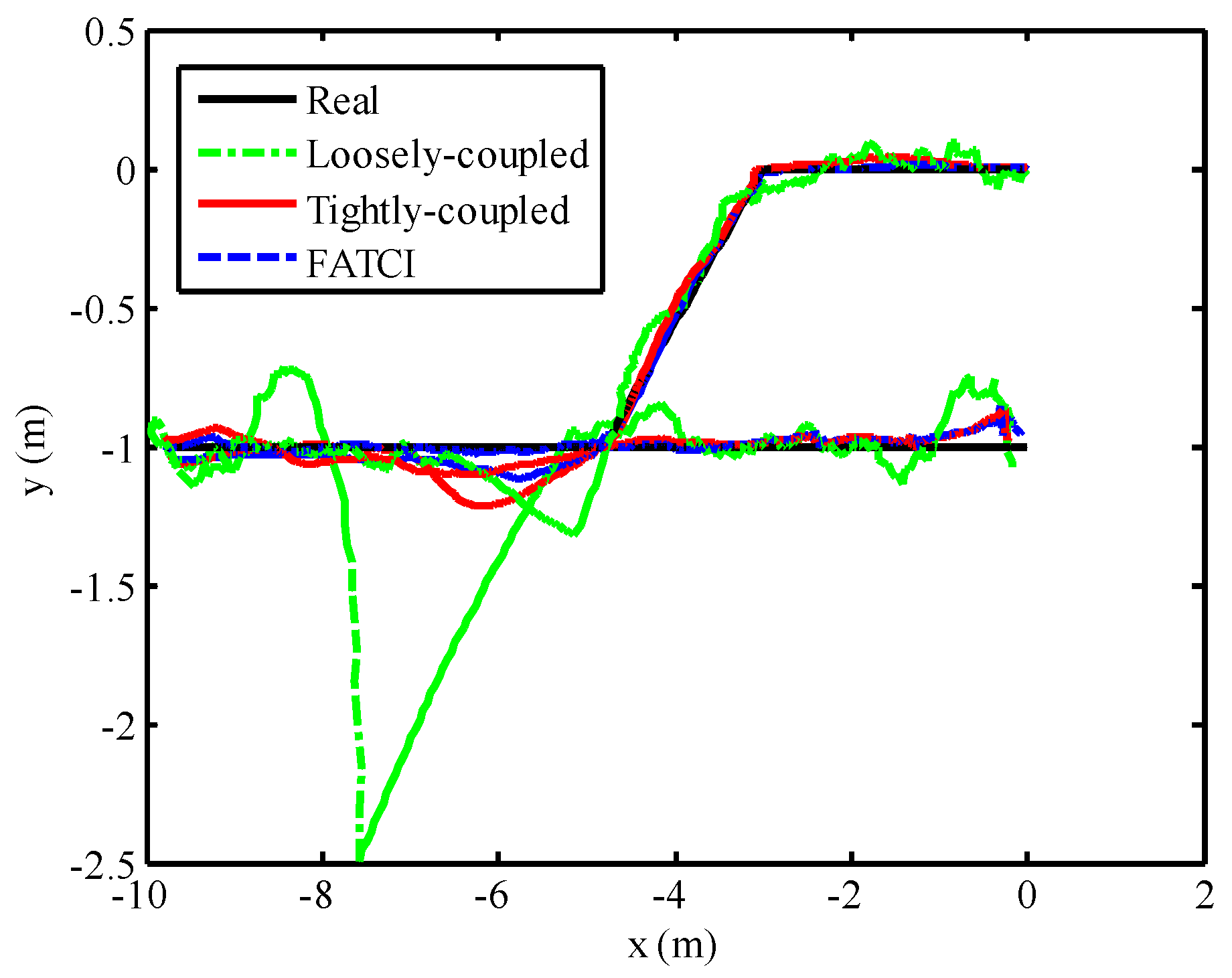
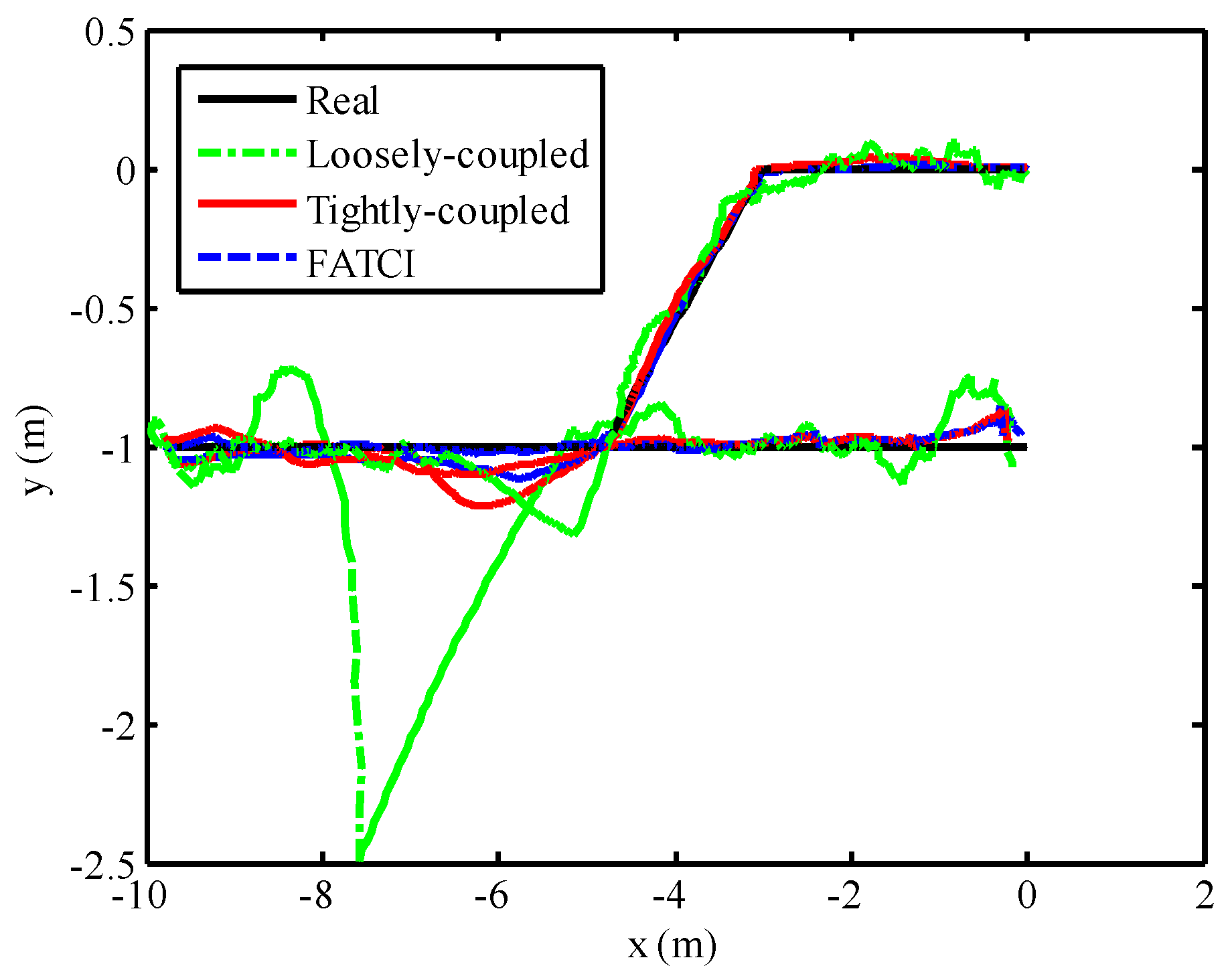
The positioning performance of the SINS/WSN integrated system with different integrated methods including loosely-coupled, tightly-coupled, and FATCI is shown in
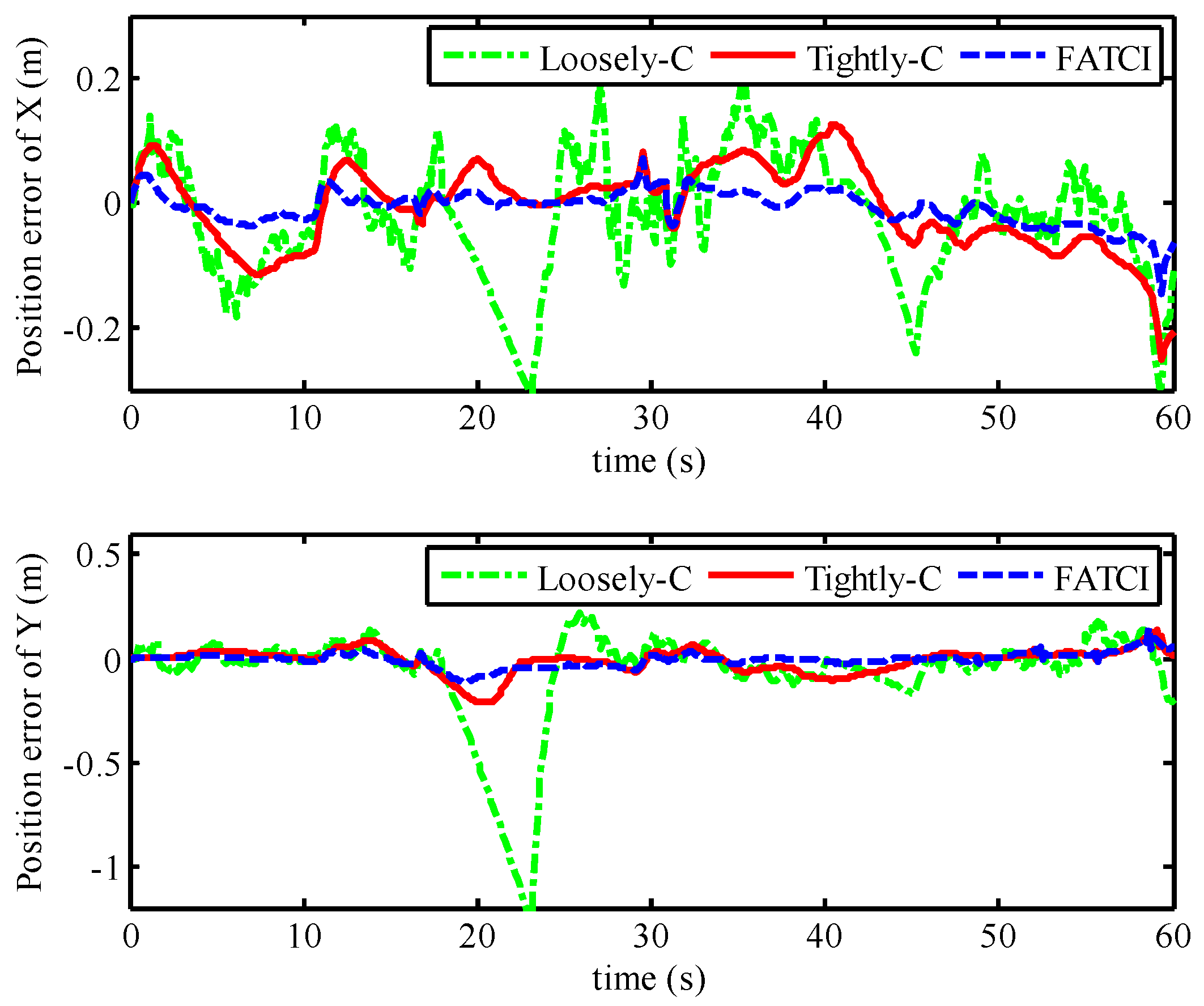
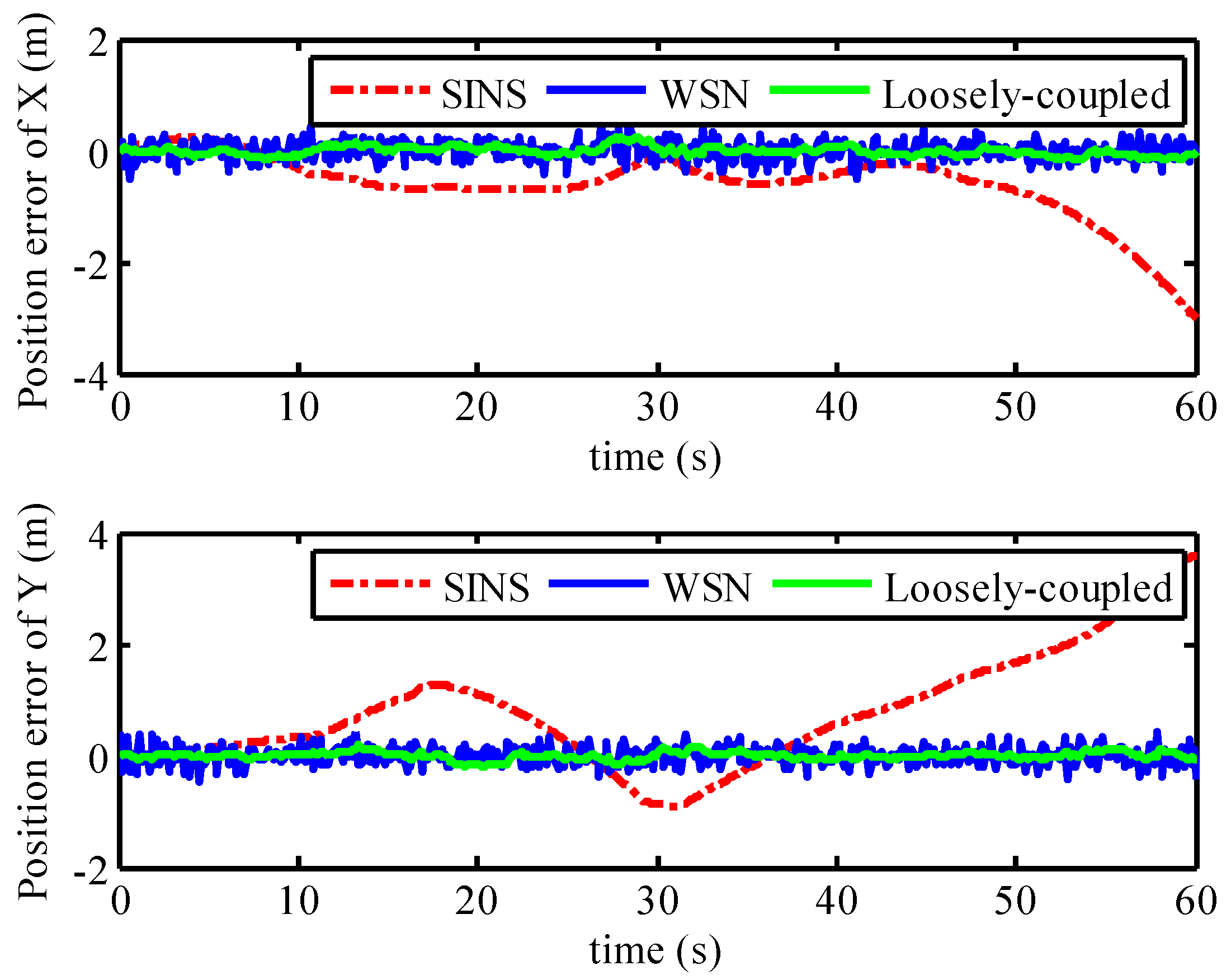
Figure 14. From this figure, we can see that the positioning result with the loosely-coupled method has expressed the large divergence at the failure time of WSN, shown as a green line. Nevertheless, that of the loosely-coupled method can track the real trajectory besides the failure time. The positioning results of tightly-coupled and FATCI methods can follow the real trajectory effectively without the drifted error. The position errors of SINS/WSN integrated system with different integrated methods are shown in
Figure 15. The maximum position error with loosely-coupled integration model was situated at 1.49 m, because of the drifted position error. The maximum position errors with tightly-coupled integration and FATCI model were 0.25 m and 0.15 m, respectively. Due to the fact that the FATIC model applied both FIS and statistic covariance of measured distance value to adjust the measurement covariance error matrix
Rk of the Kalman filter, the influence from different noises of measured distance would be weakened and the confidence level for every measurement would be changed based on the measured accuracy. The FATCI method reduces the position error by about 40% compared with the traditional tightly-coupled integration method.
5.5. FATCI Model with WSN Normal Condition
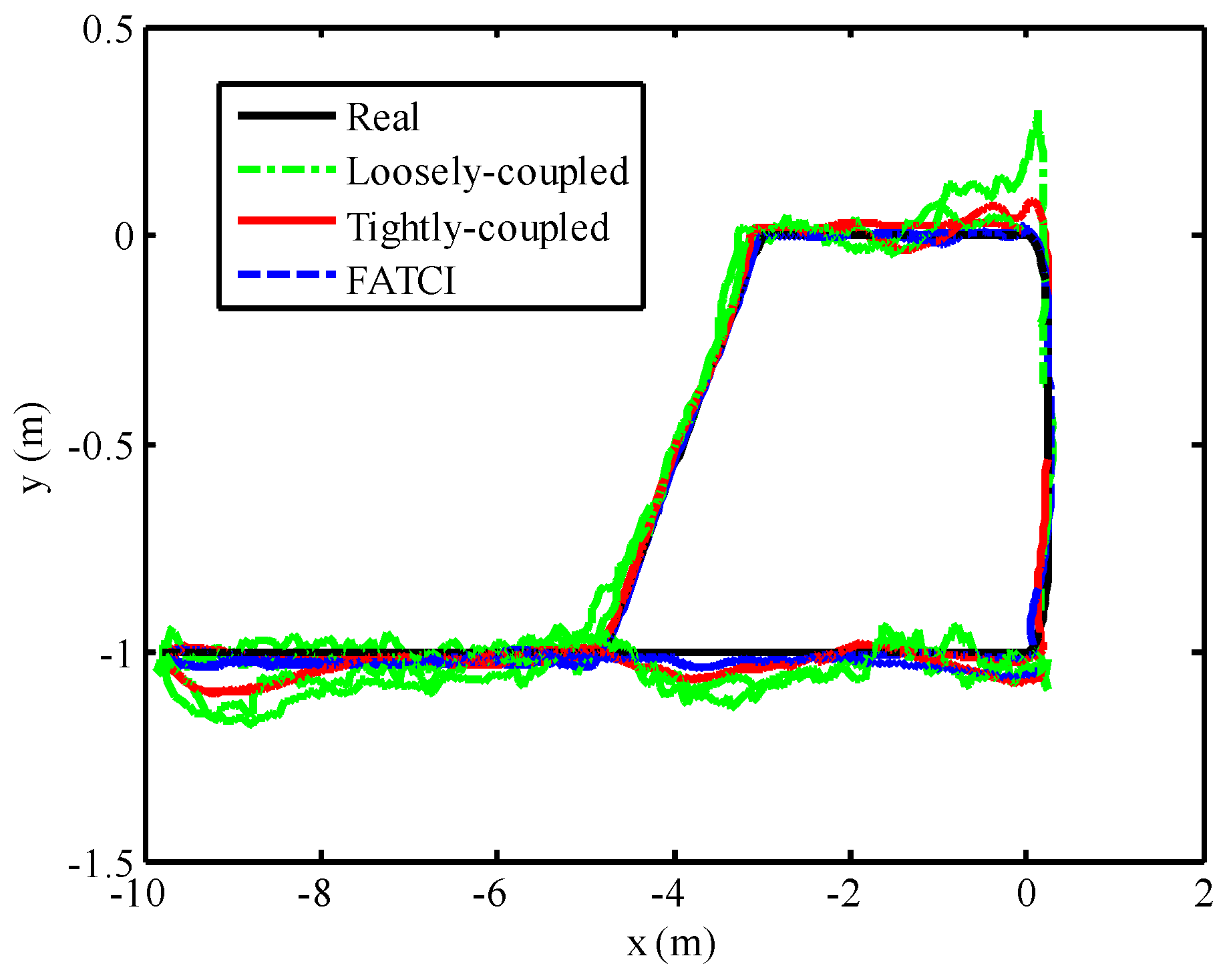
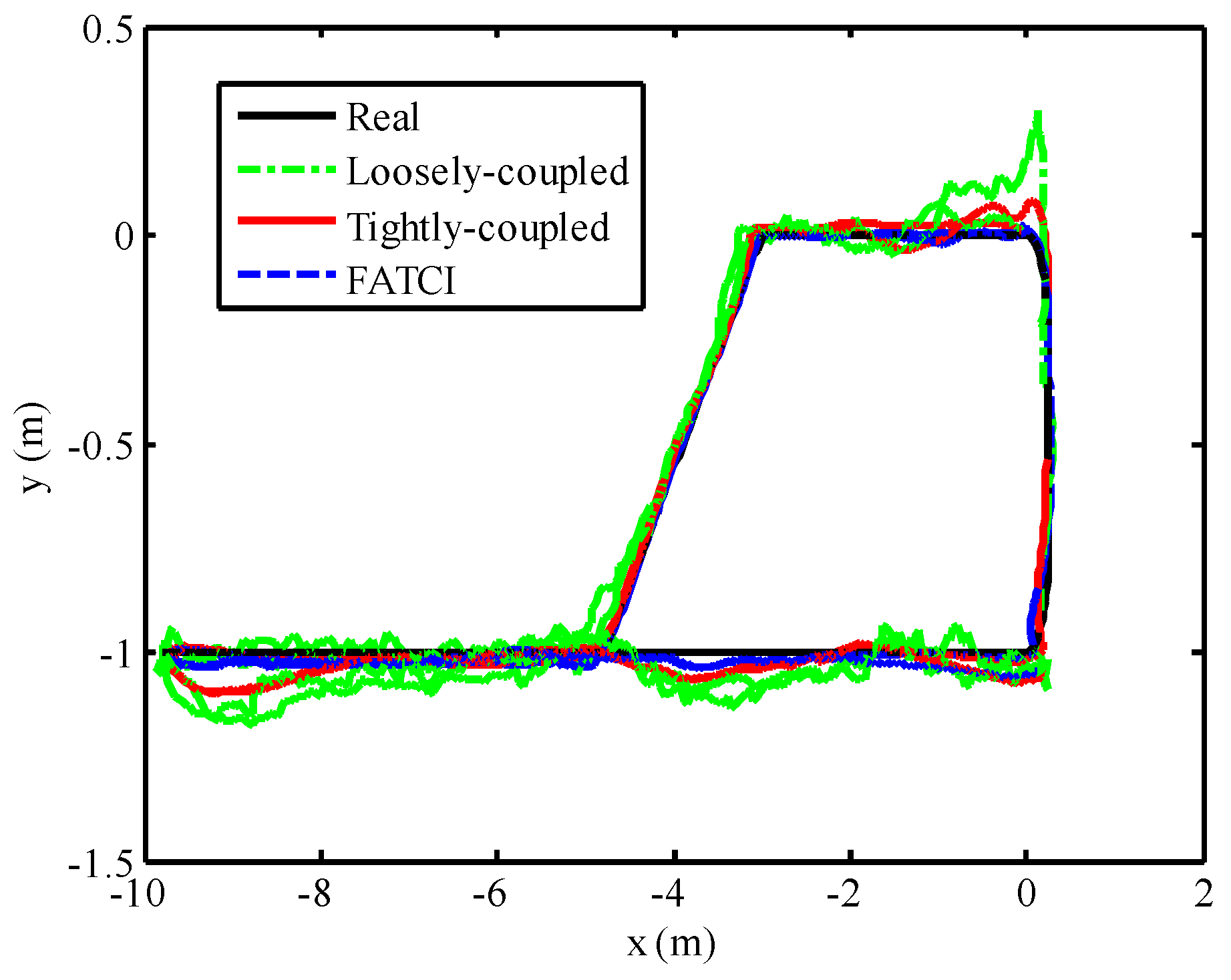
With the aim of analyzing the positioning performance of the FATCI model more effectively, we have operated the SINS/WSN experimental platform with WSN normal condition. In order to illustrate the experimental performance of integrated positioning system more effectively, the duration time of the experiment has been increased to 127 s. The mobile target moved along with the pre-set trajectory for two loops. In the course of the experiment, the influence of WSN from reflection and the multipath of the wireless signal were considered adequate. Meanwhile, every anchor node can receive the wireless signal broadcasted by the mobile node in the whole process of motion. So the loosely-coupled integration model can be achieved all the time. The performance of SINS/WSN integrated positioning system with loosely-coupled, tightly-coupled, and FATCI models is shown in
Figure 16. The positioning results with loosely-coupled, tightly-coupled, and FATCI models are represented by a green dashed line, a red line, and a broken blue line, respectively. It is obvious that all the positioning results with different integration methods can track the real trajectory, which is represented by a black line. Note that the positioning trajectory of loosely-coupled and tightly-coupled methods produced larger position error at some corners away from the real trajectory.
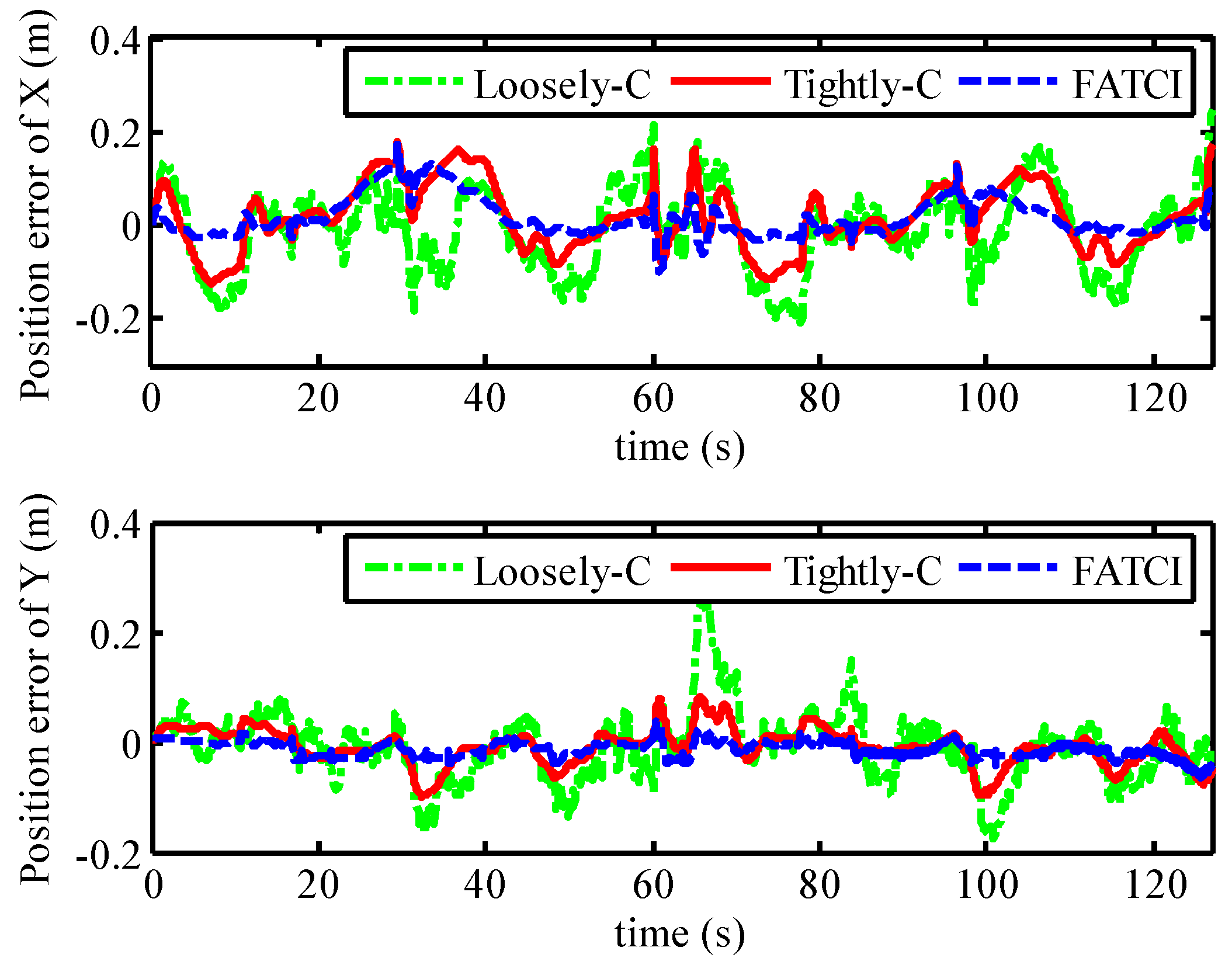
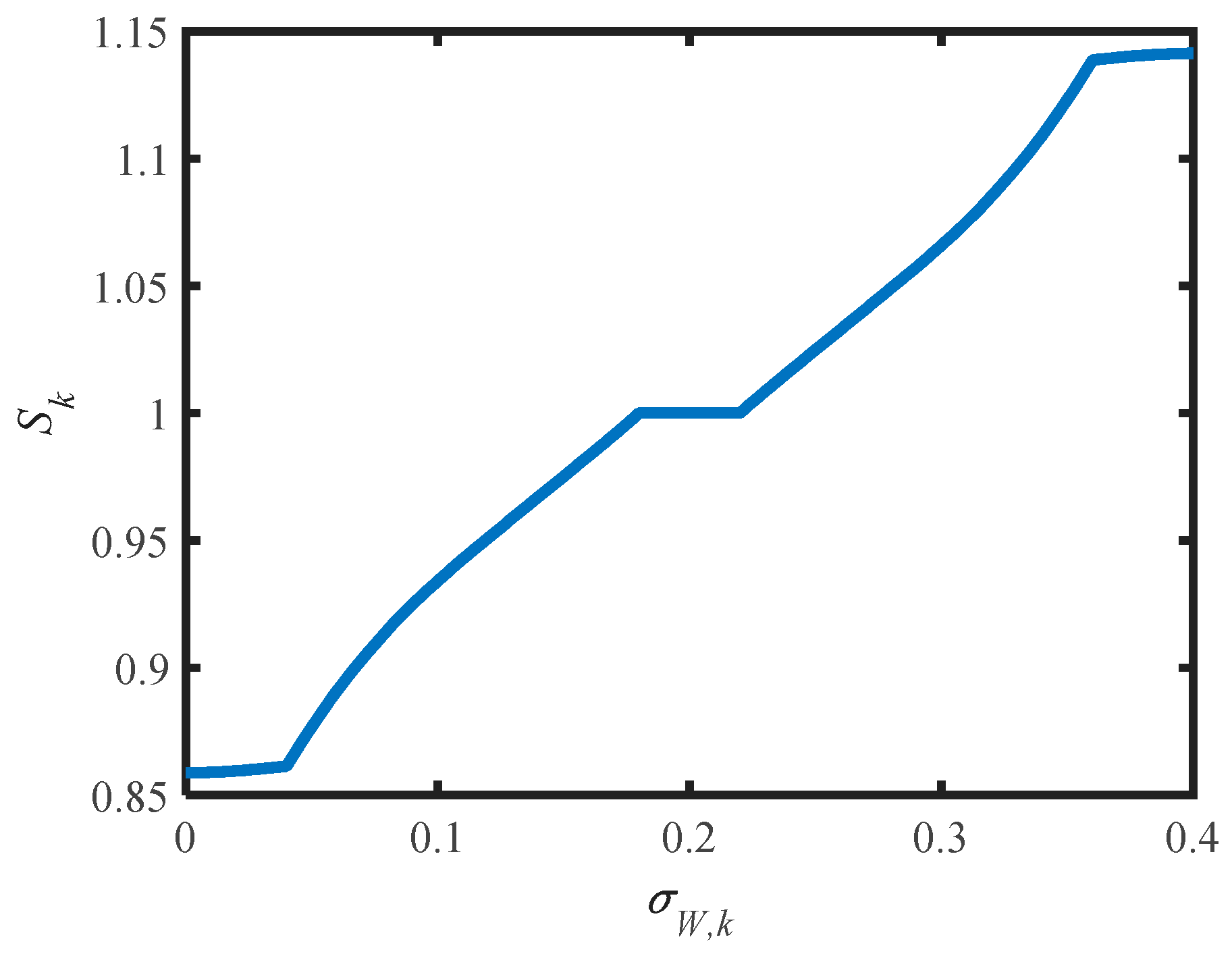
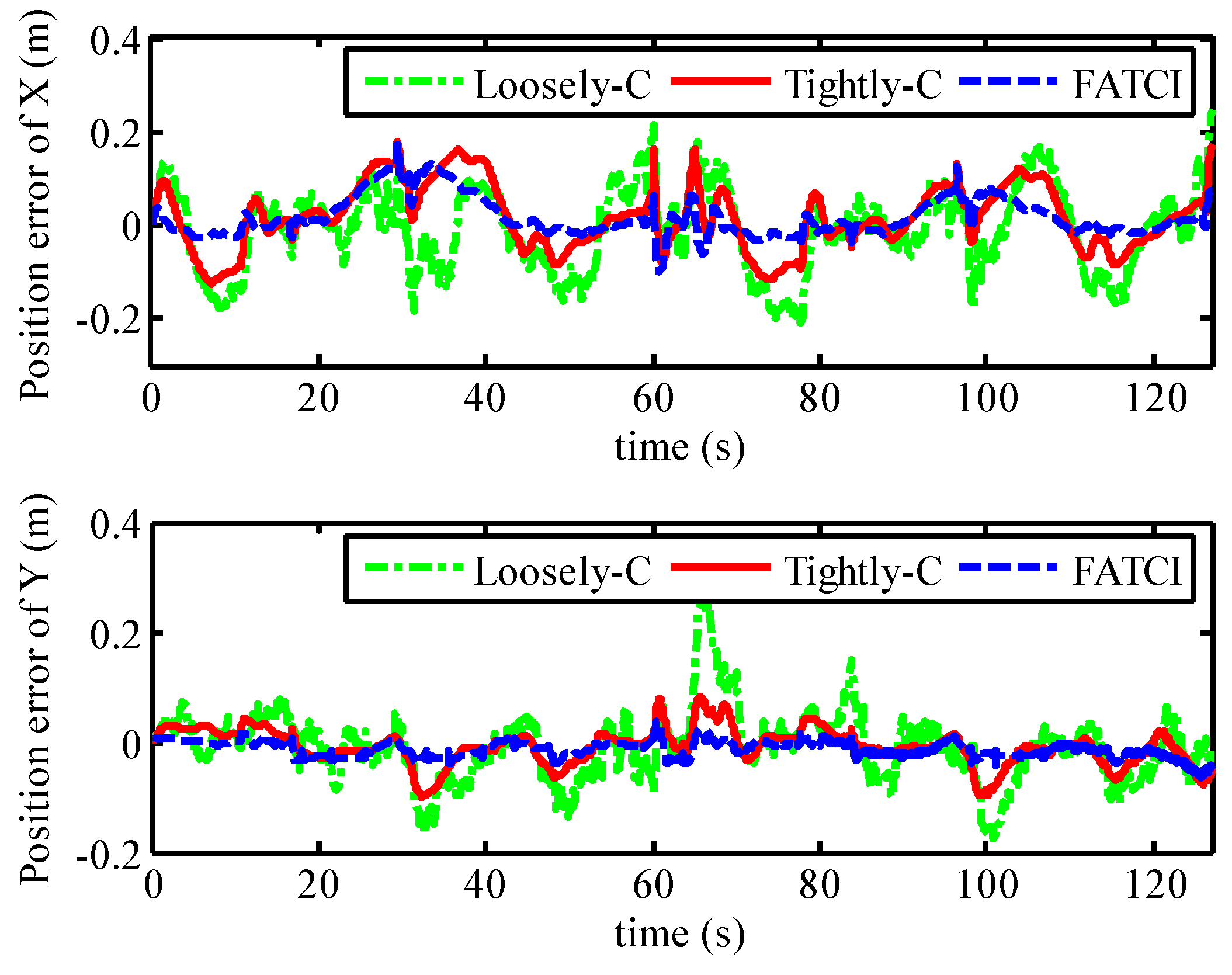
The position errors for the SINS/WSN integrated system were calculated with different methods and plotted in
Figure 17. From this figure, the positioning system based on the FATCI model can track the real trajectory with smaller position error. On the contrary, the loosely-coupled and tightly-coupled models have produced some serious errors in the process of motion. We can observe that the position error with the FATCI model was less than that with loosely-coupled and tightly-coupled models because the FATCI model can adjust the measurement covariance error matrix
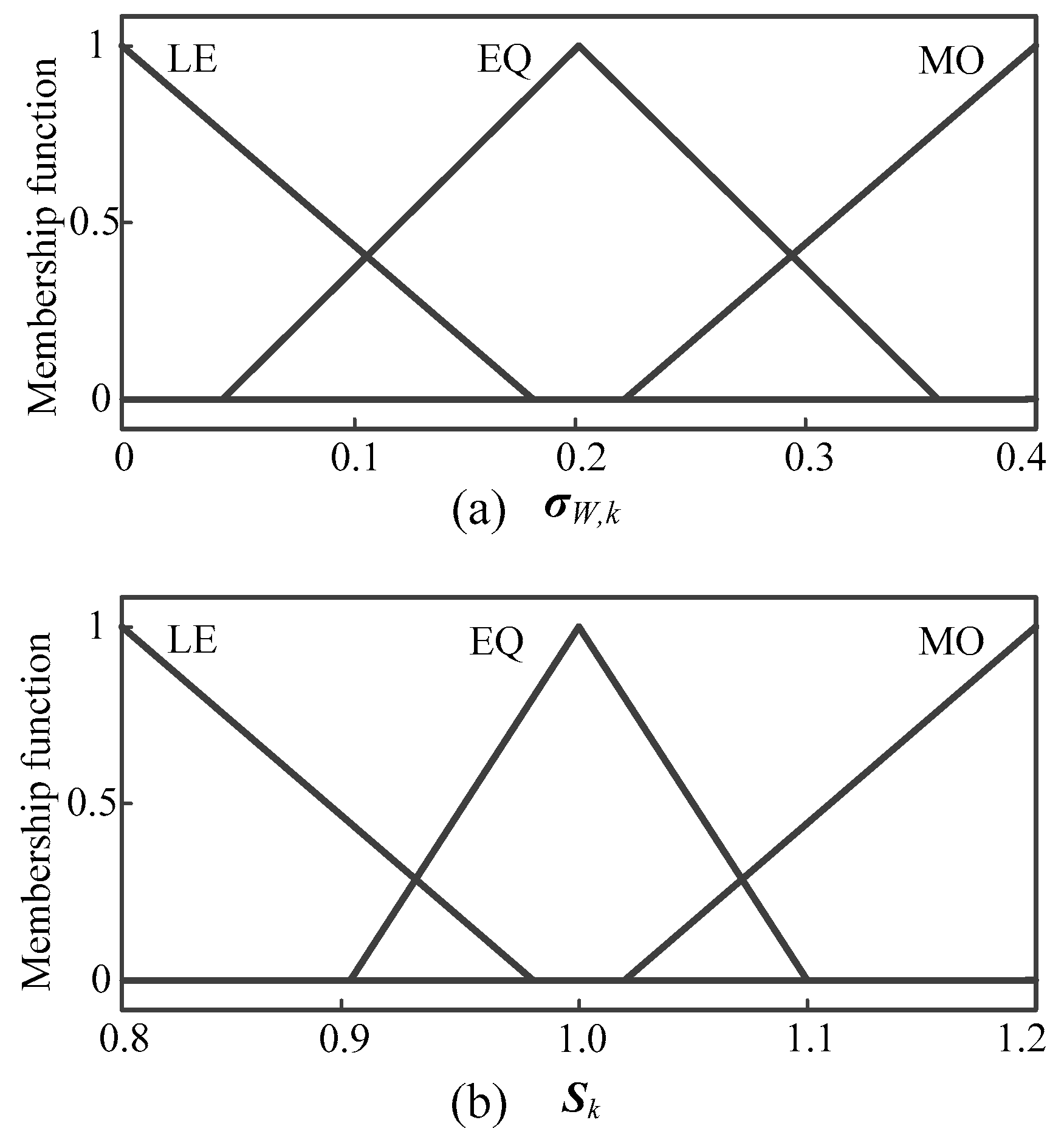
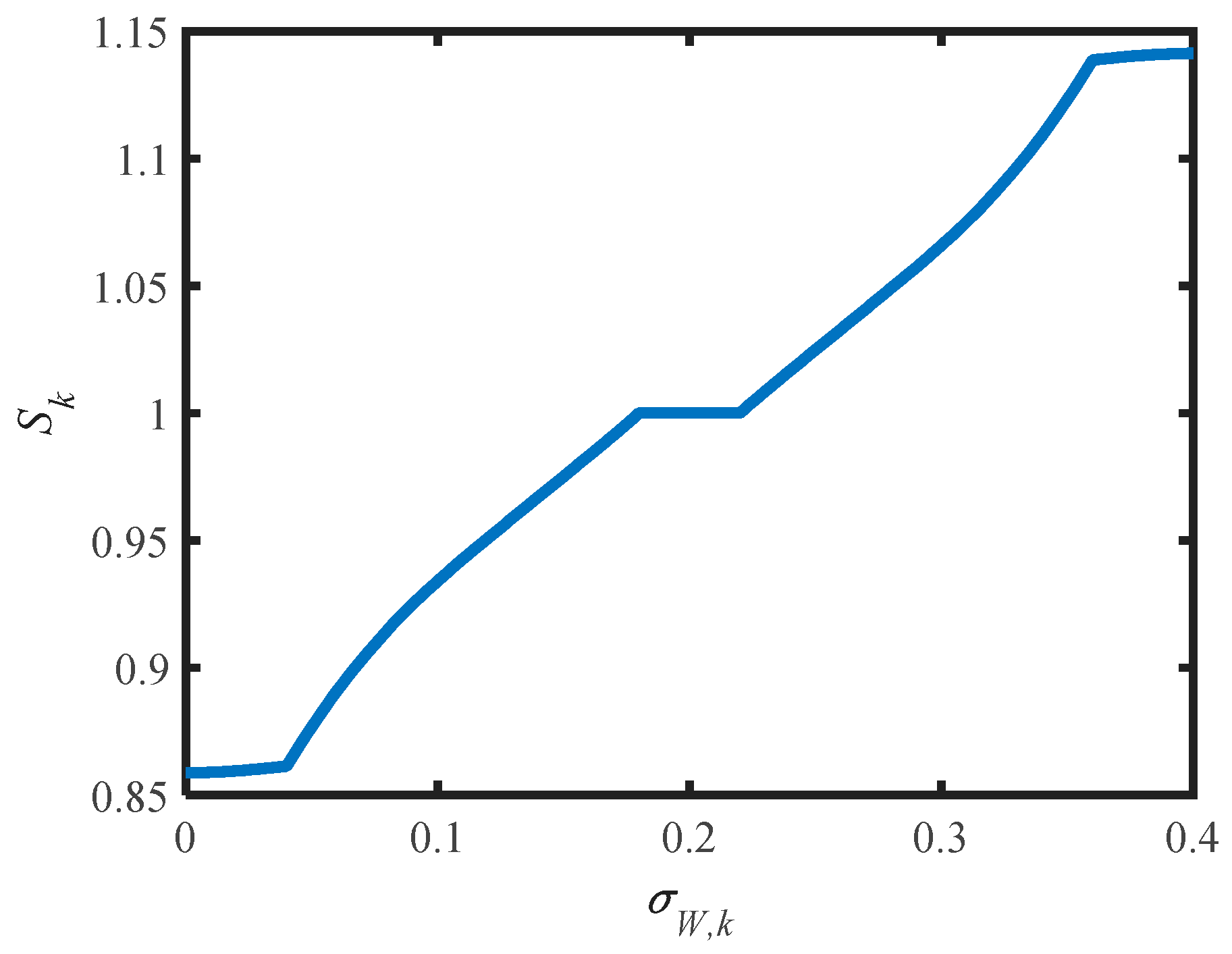
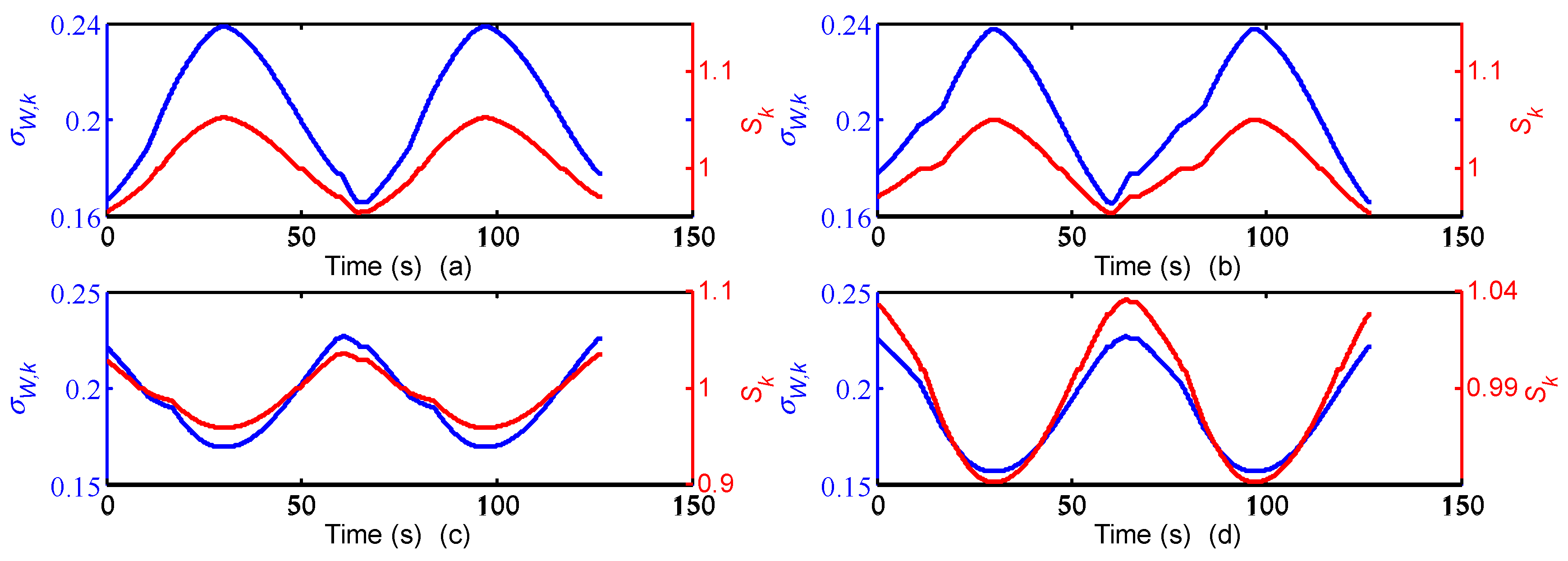
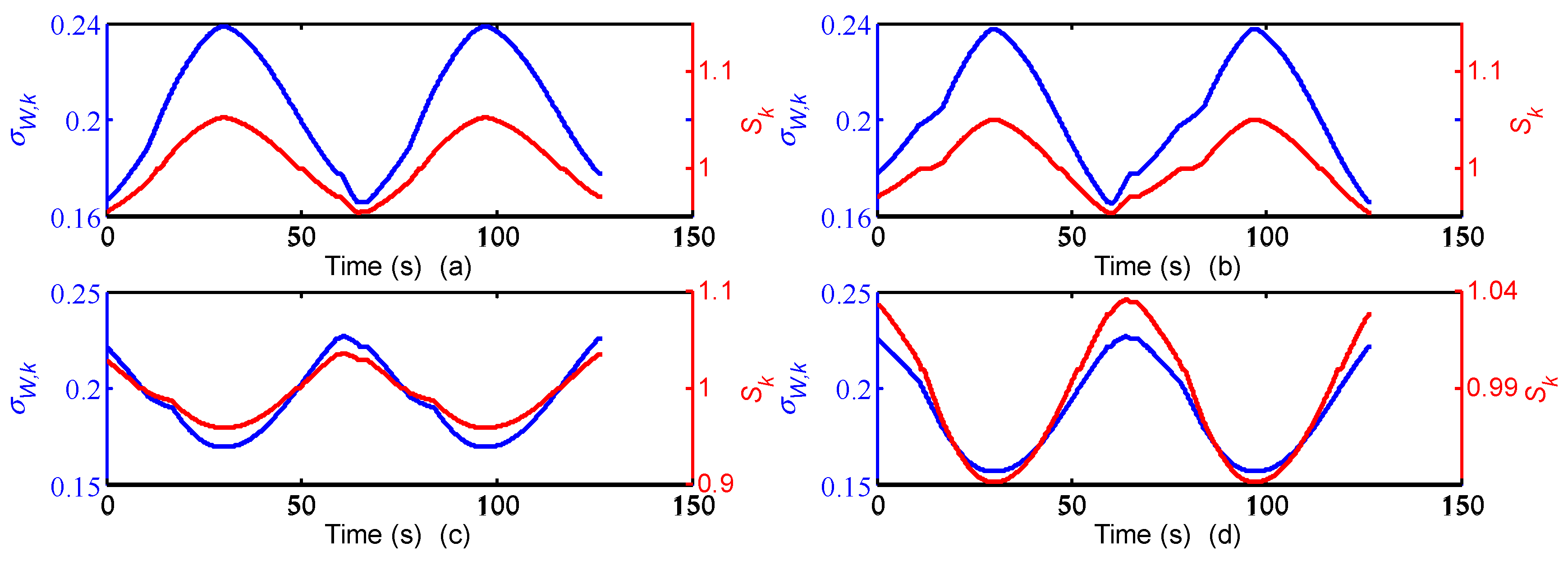
Rk of the Kalman filter based on the accuracy of distance measured in WSN. The results for input
σW,k and output
Sk of the FIS are shown in
Figure 18. The parameter
Sk of every anchor node changed along with the covariance
σW,k of measured distances, according to the control algorithm of FIS. Meanwhile, the change rules for the parameter
Sk of every anchor node were not the same but depended on the measured distance from the mobile node to every anchor node. The measurement covariance error matrix
Rk of the Kalman filter and a confidence level of measurements can be adjusted adaptively. As a result, the positioning accuracy of the FATCI model increased.
The maximum position errors with the loosely-coupled, tightly-coupled, and FATCI models were 0.3748 m, 0.2344 m, and 0.1488 m, respectively. Note that, in this case, the accuracy of the positioning system with the FATCI model obviously surpassed that with loosely-coupled and tightly-coupled integration models, with 60.3% and 36.5% improvements, respectively.
Table 1 shows a performance comparison for different integration models based on the SINS/WSN integrated positioning system.
6. Conclusions
This paper has proposed a FATCI positioning system using SINS/WSN, aimed at rectifying the low stability of a loosely-coupled model and the low accuracy of the traditional tightly-coupled model. The main contribution of the paper is summarized as follows: Firstly, the measured distance correction model of LSR was built based on a series of WSN tests for range measurement. The systematic error of measured distance has been corrected and the positioning accuracy of pure WSN increased. Secondly, the tightly-coupled integration model of SINS/WSN was established with the corrected measured distance between every anchor node and the mobile node. Then the stability of the integrated positioning system was enhanced for the WSN short-term failure. Finally, the FIS was utilized to adjust the confidence level of the Kalman filter for WSN range measurement. As a consequence, the FATCI model for SINS/WSN was finished.
We have evaluated the performance of the proposed FATCI model using a mobile target in an indoor environment. The experimental results have shown that the loosely-coupled integrated positioning system can track the real trajectory and overcome the disadvantages of SINS-only and WSN-only. However, the loosely-coupled integration model produced drifted error for WSN short-term failure compared with the traditional tightly-coupled and proposed FATCI models. For the normal WSN, the maximum position errors with the loosely-coupled, traditional tightly-coupled, and FATCI models were 0.3748 m, 0.2344 m, and 0.1488 m, respectively. The accuracy of the positioning system with the FATCI model obviously surpasses that of the loosely-coupled and traditional tightly-coupled integration models, with 60.3% and 36.5% improvements, respectively.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}