
Characteristic Evaluation of a Shrouded Propeller Mechanism for a Magnetic Actuated Microrobot


Abstract
:1. Introduction
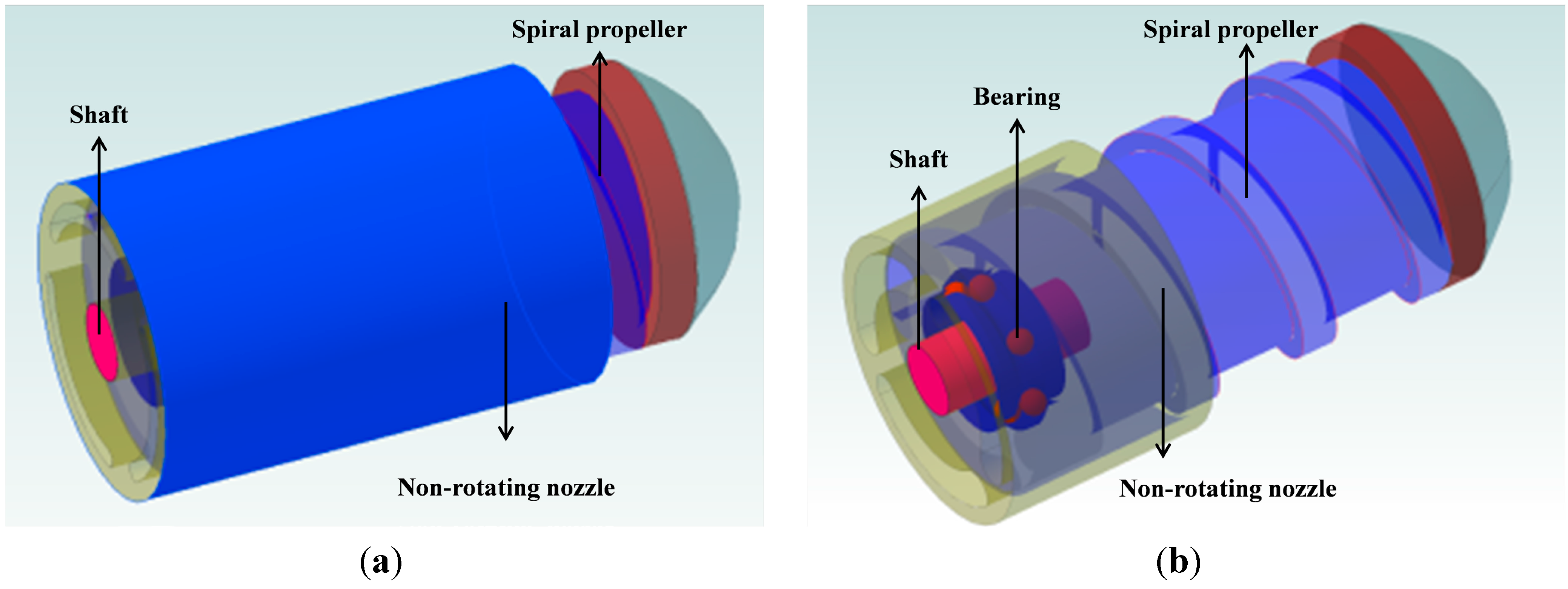
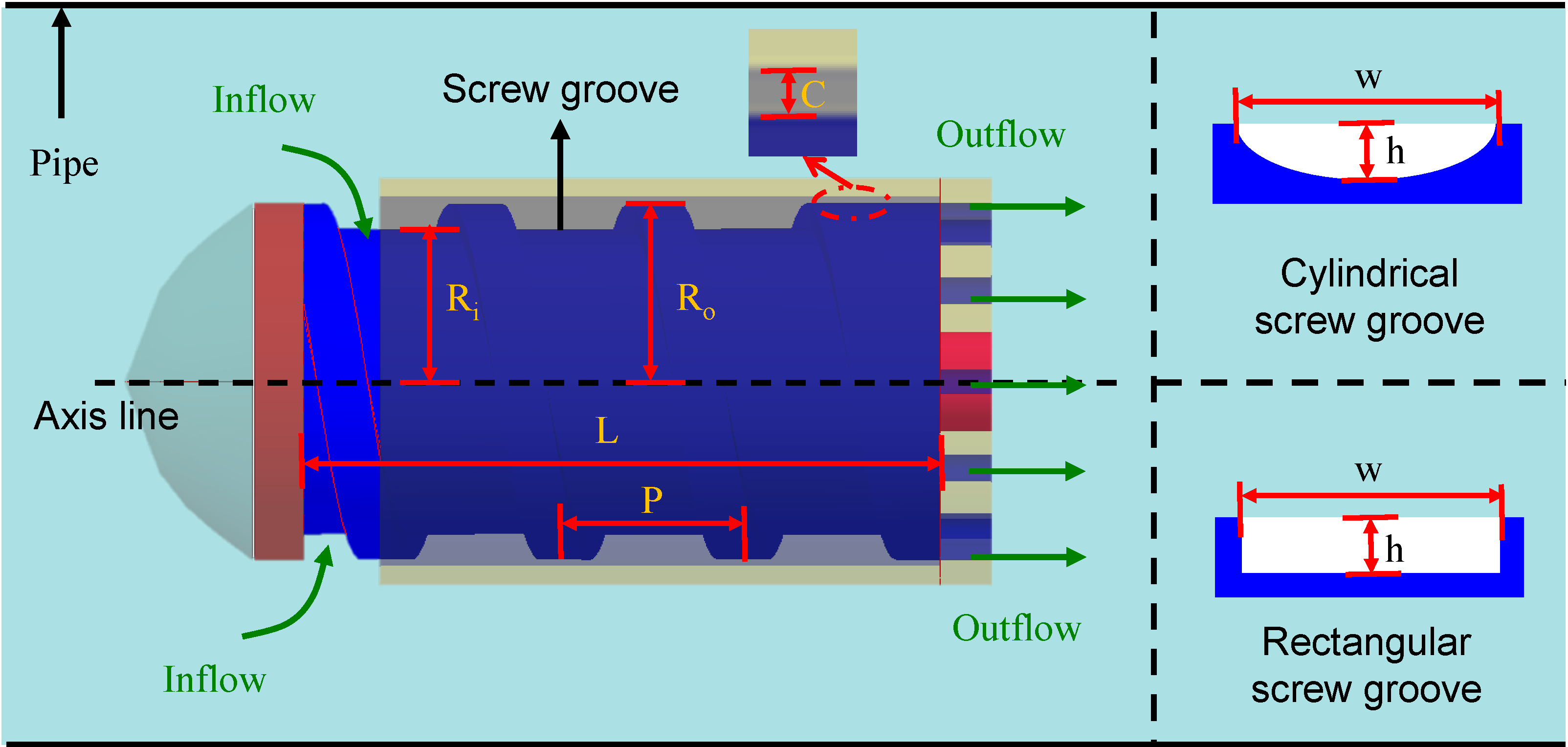
2. Modeling of the Magnetic Actuated Microrobot with Spiral Jet Motion
3. Magnetic Actuated Microrobot with Spiral Jet Motion
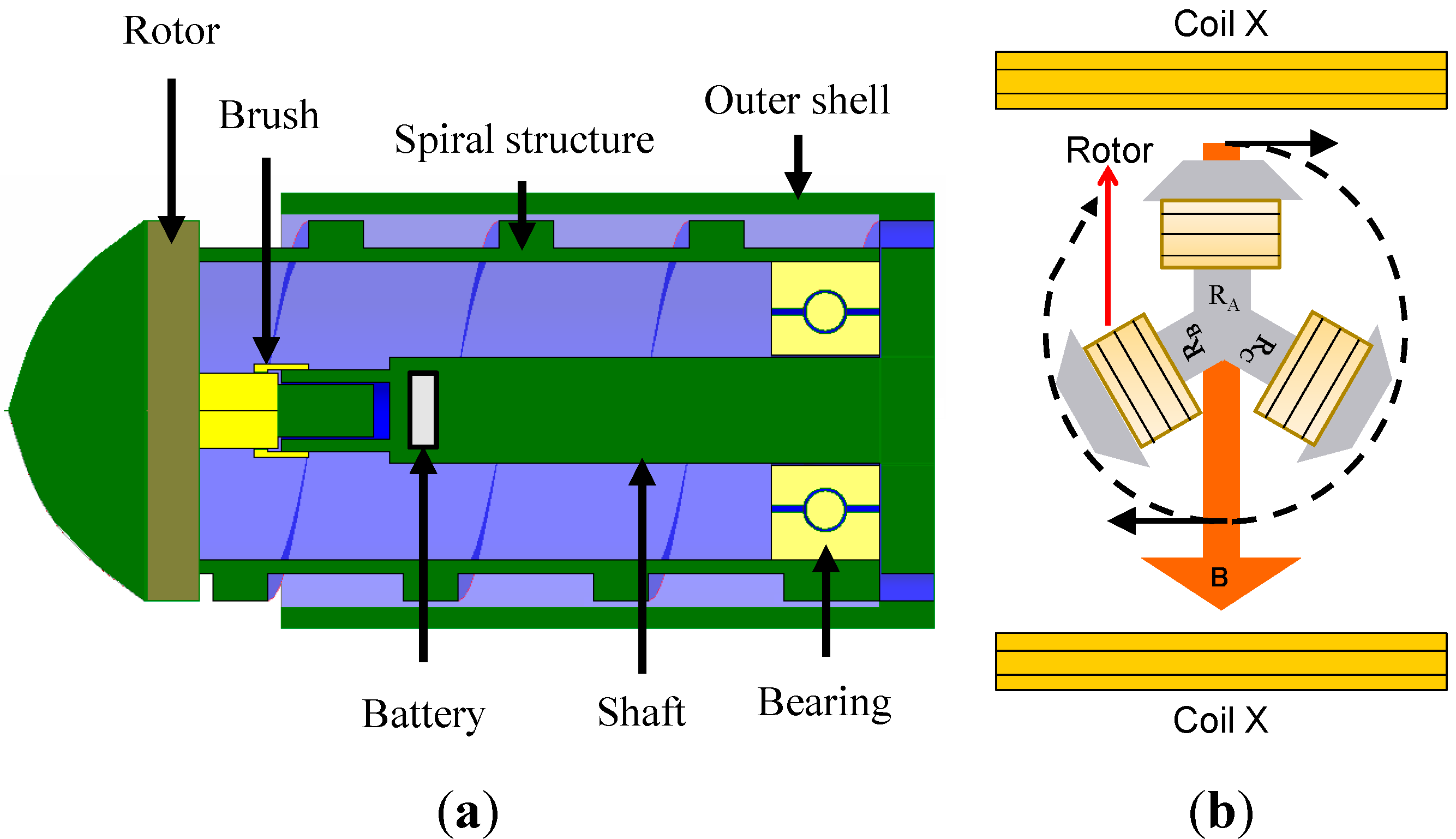
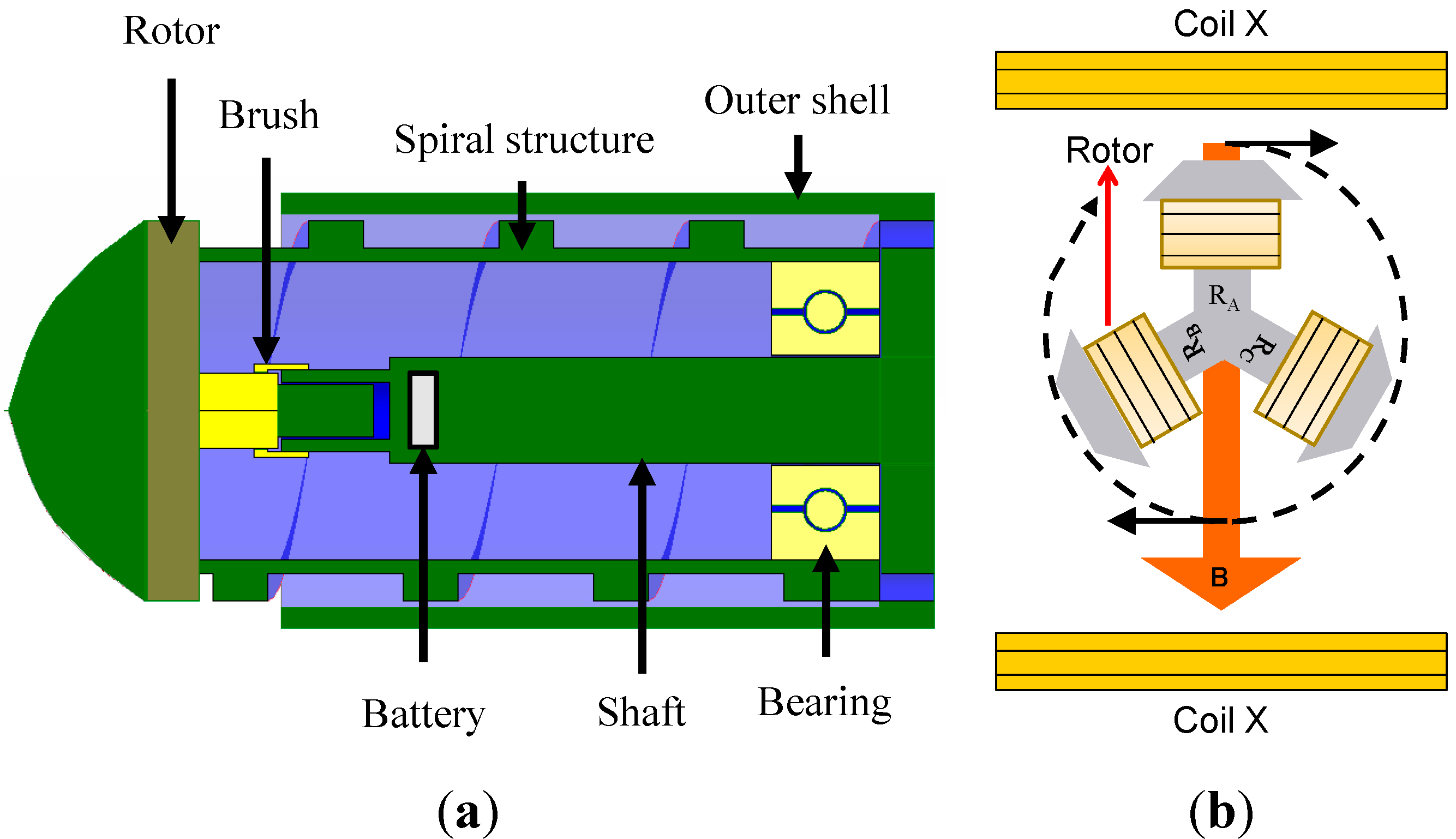
3.1. Electromagnet Actuated Microrobot
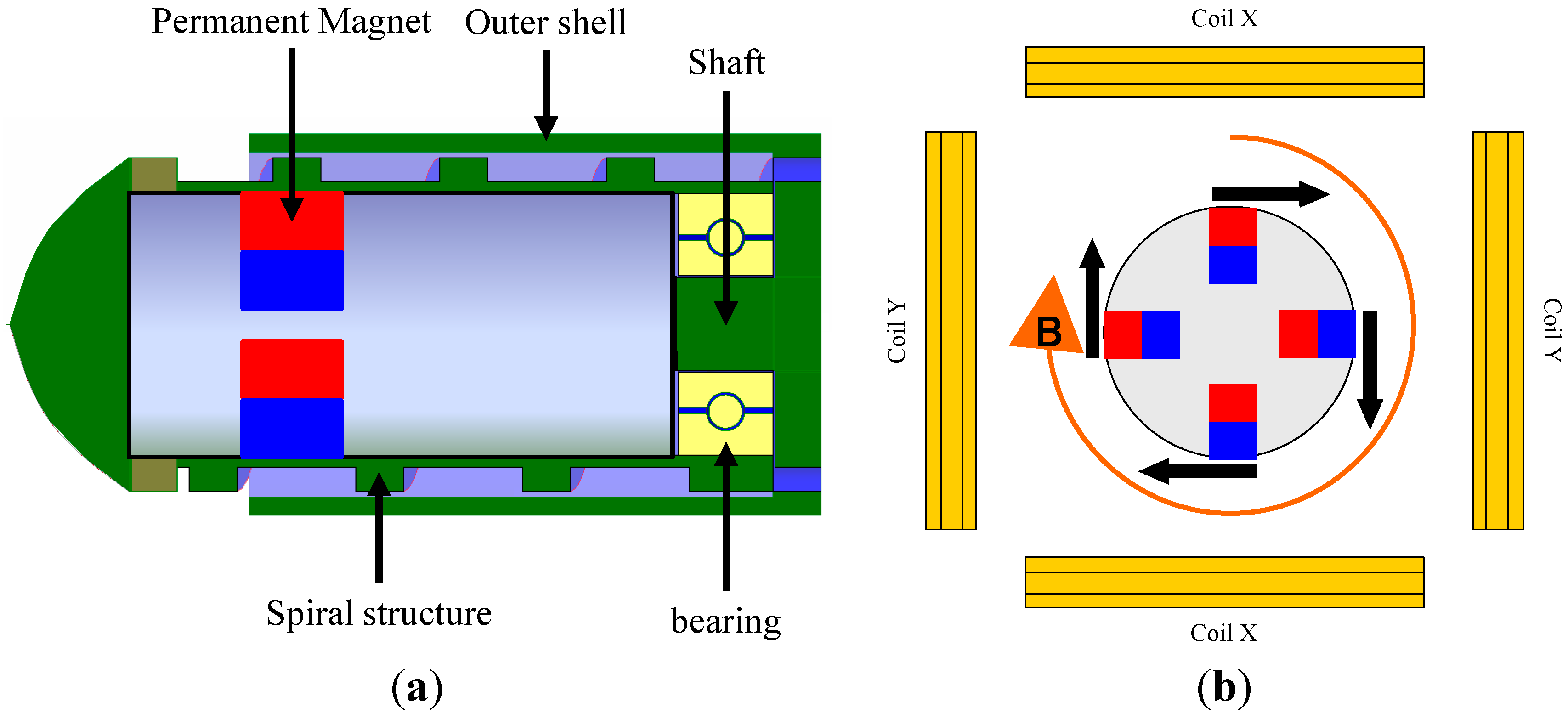
3.2. Permanent Magnet Actuated Microrobot
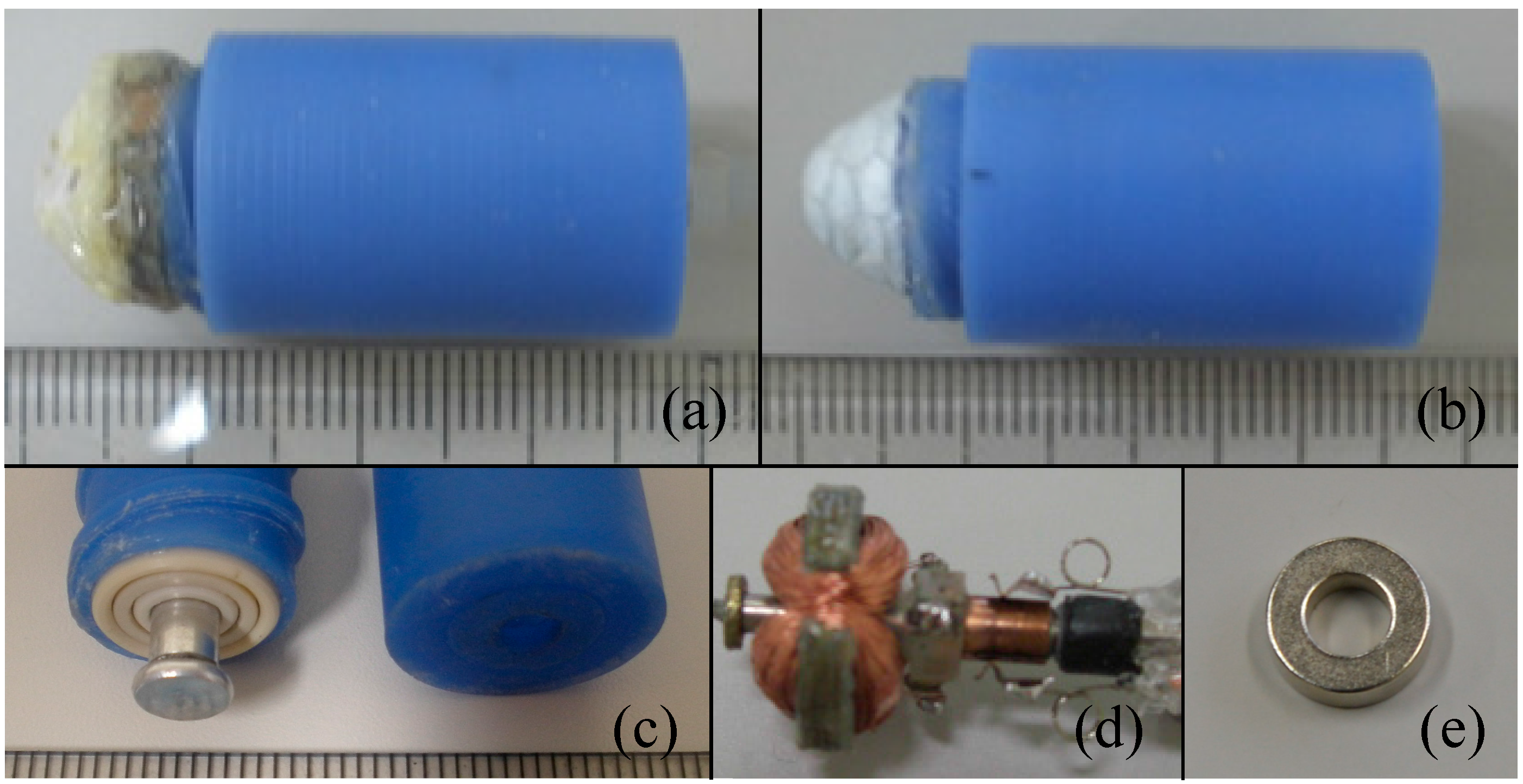
3.3. Fabrication of the Microrobot

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Microrobot | Electromagnet Actuated Microrobot | Permanent Magnetic Actuated Microrobot |
|---|---|---|
| Size | Φ14 mm × 37 mm | Φ14 mm × 37 mm |
| Actuator | Three-pole rotor | O-ring type magnet |
| Current | 0.25A | - |
| Magnet | - | Φ5 mm × Φ9.5 mm × 4 mm with 1250 mT |
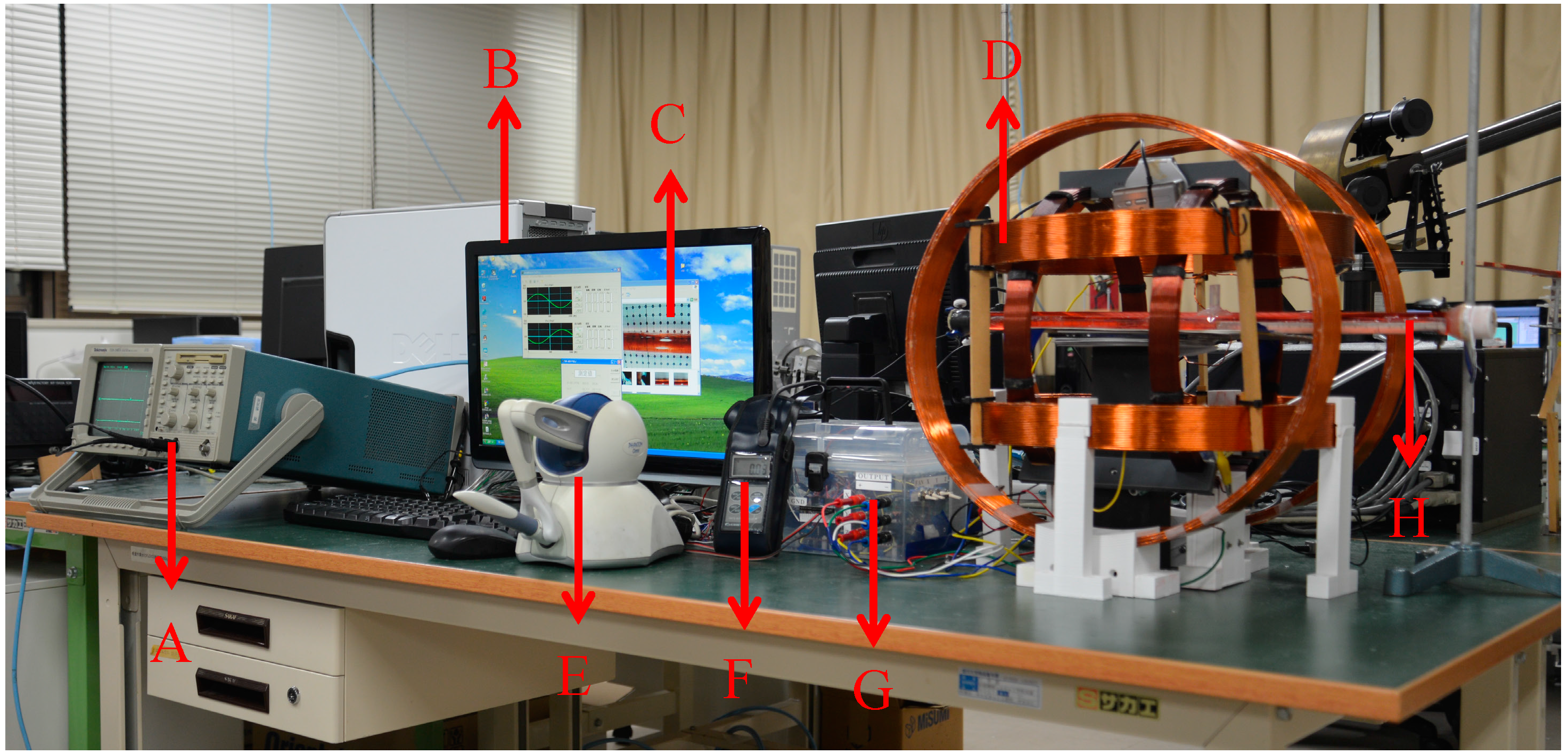
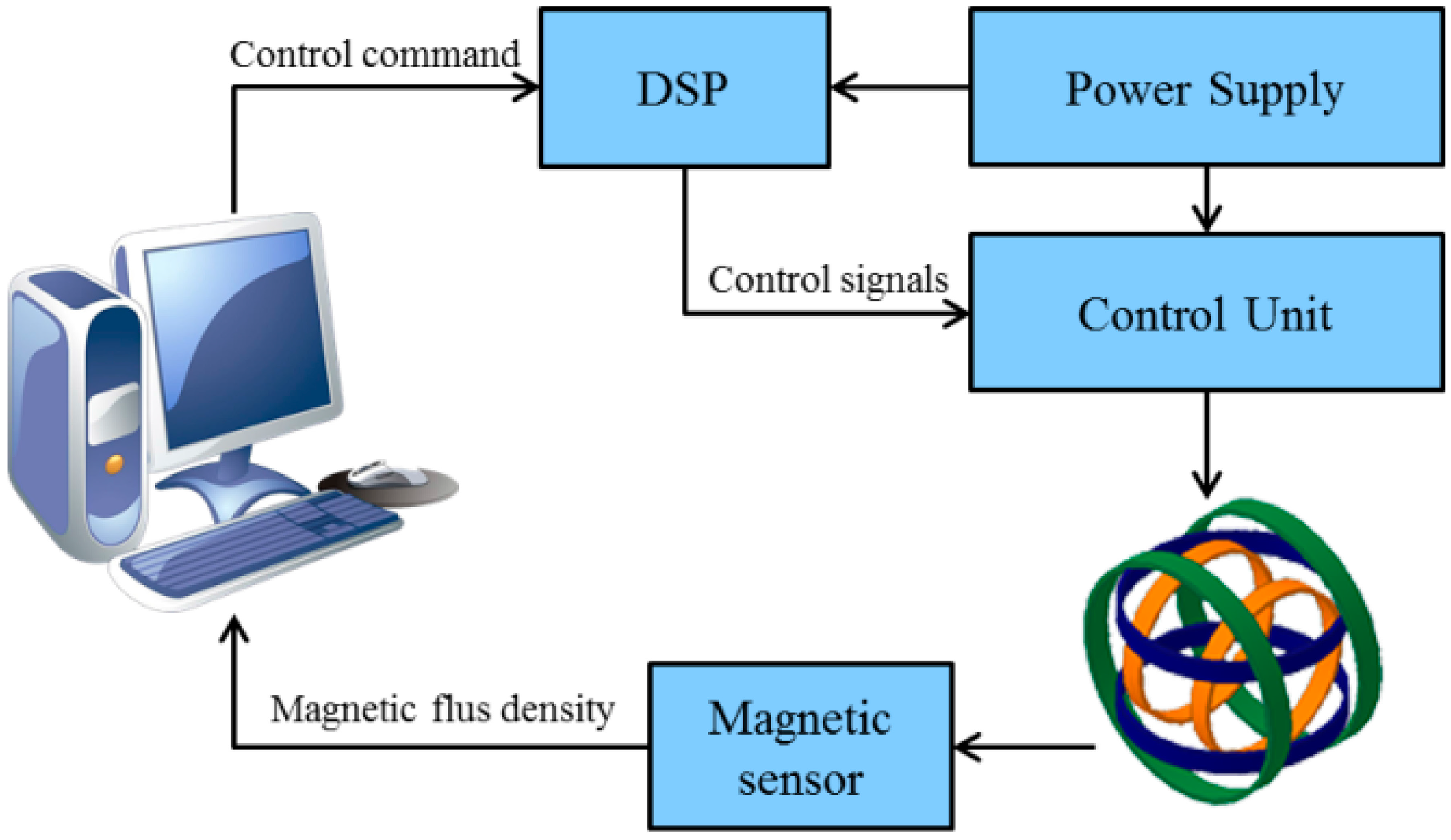
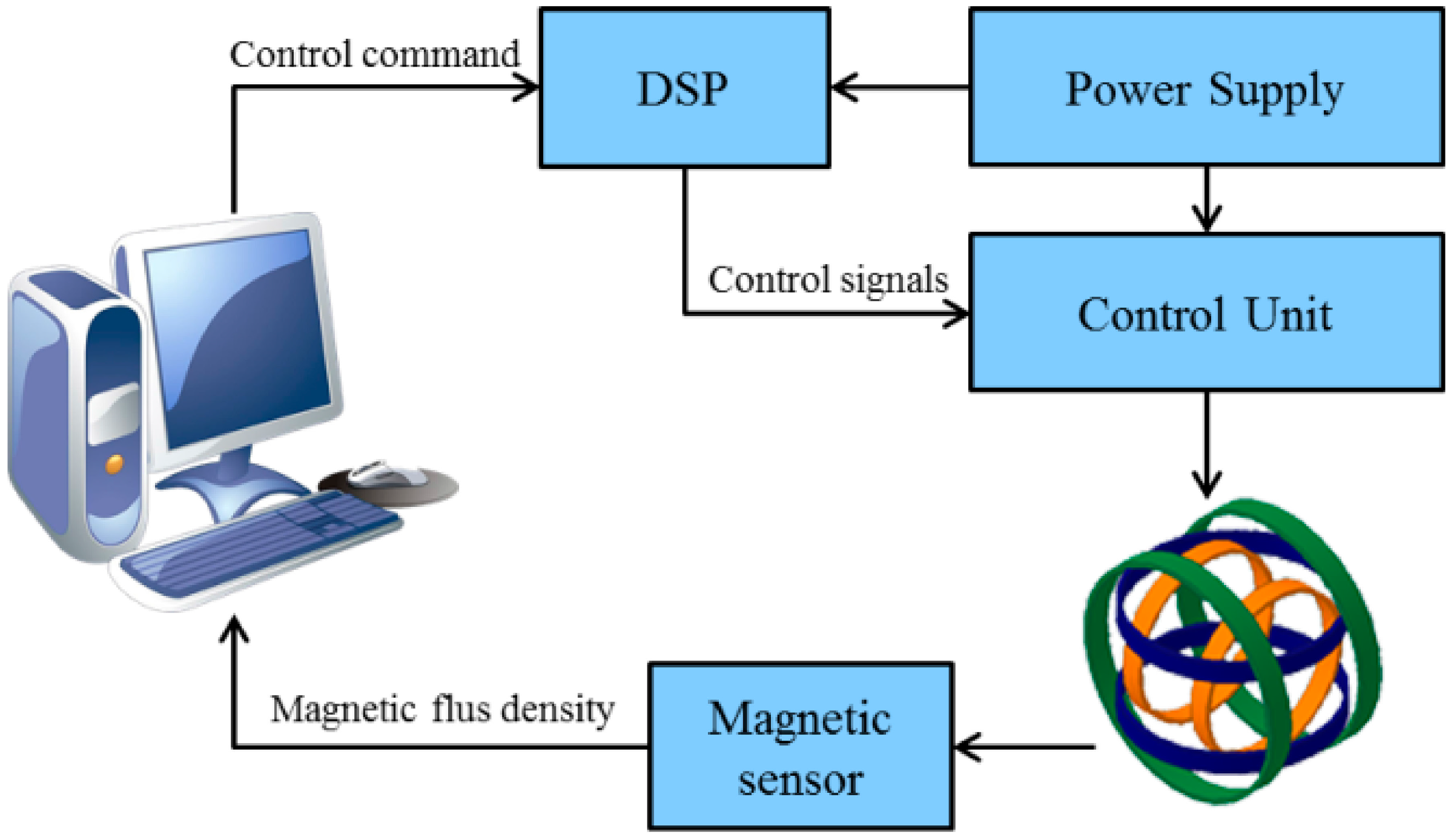
4. Electromagnetic Actuation System
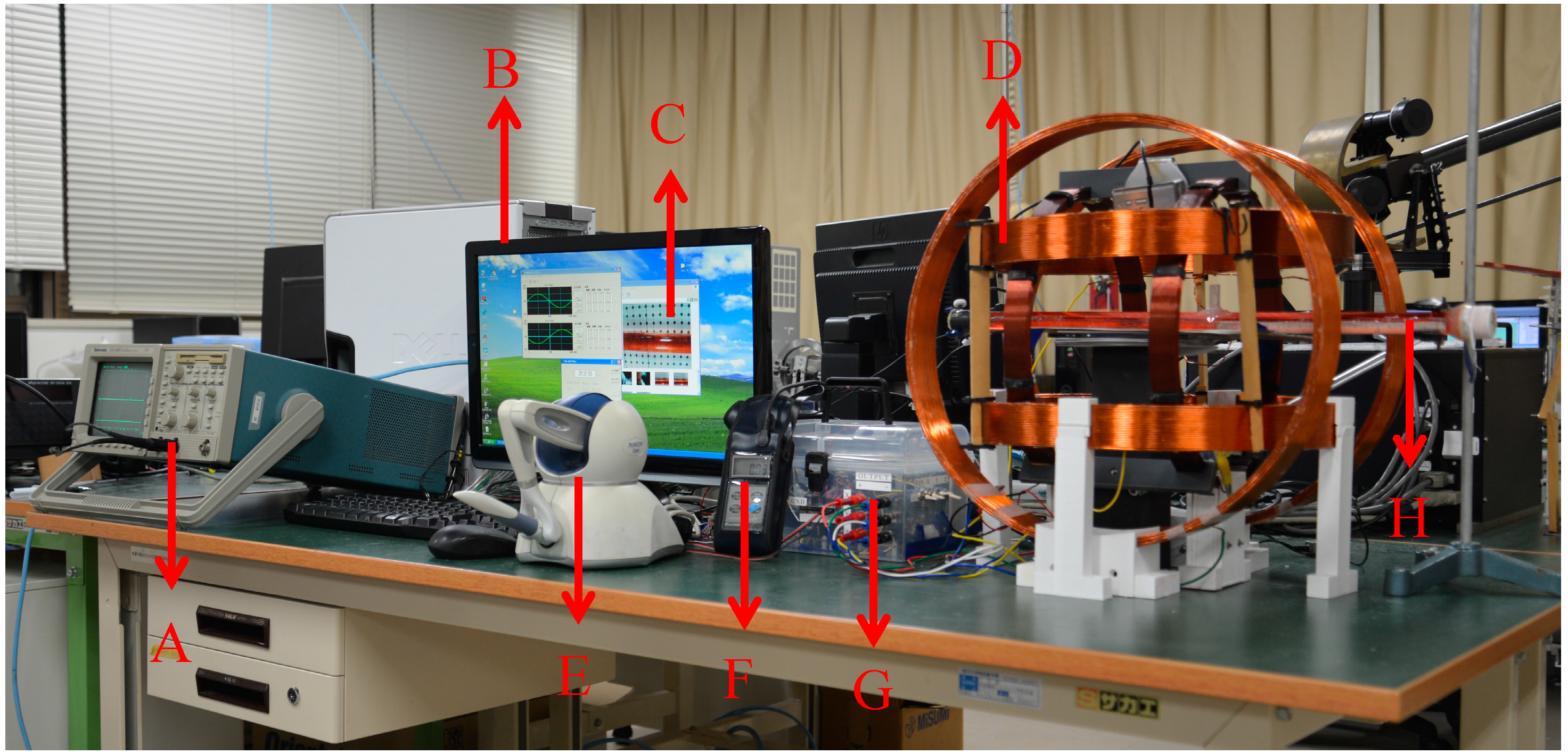
4.1. Helmholtz Coil without Iron Core
4.2. Helmholtz Coil with Iron Core
5. Experiments and Results
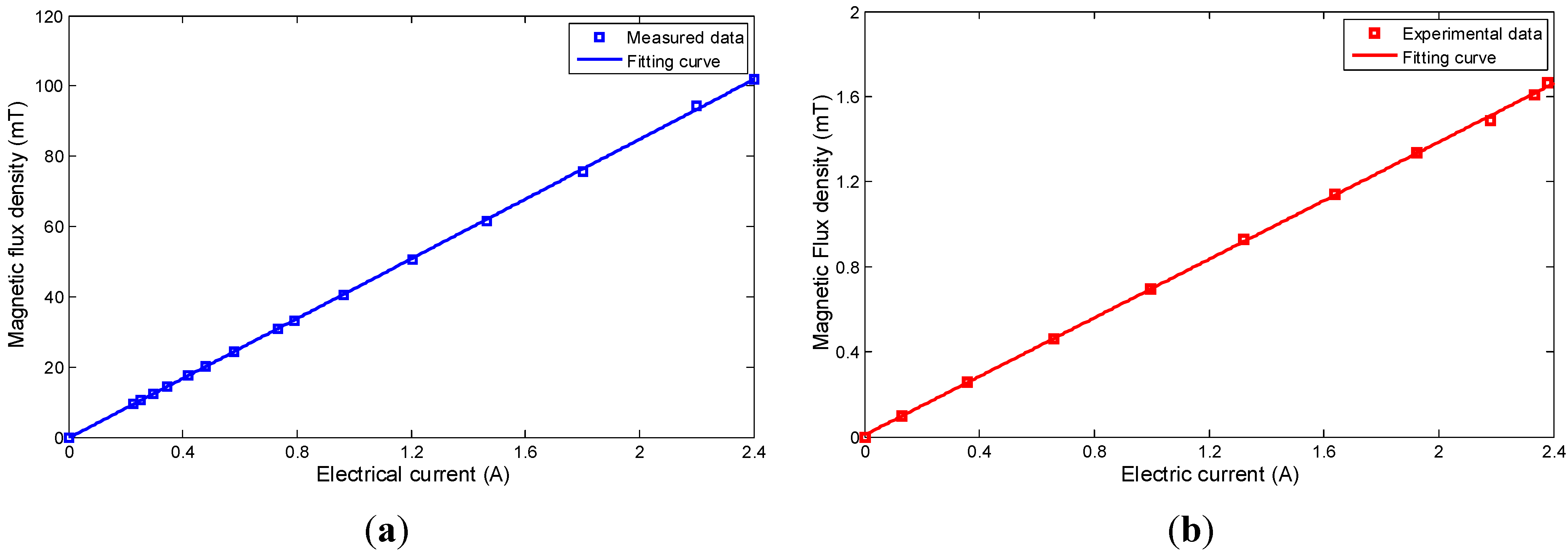
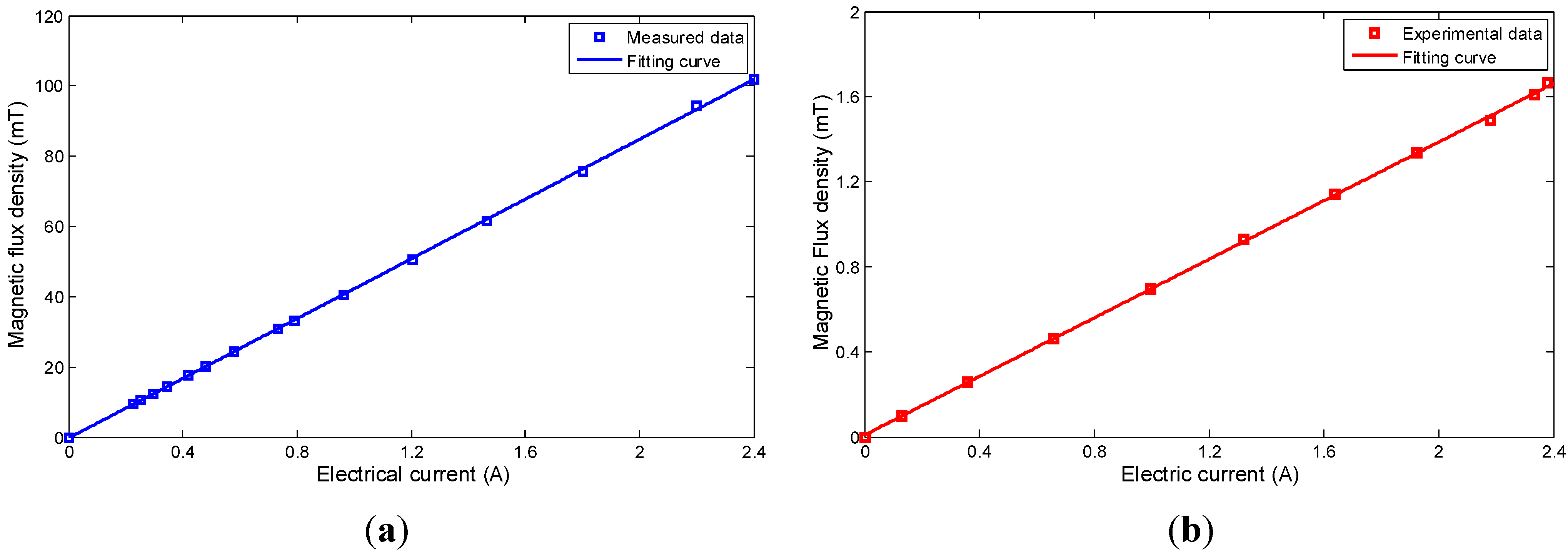
5.1. Measurement of the Magnetic Flux Density
5.2. Measurement of the Rotational Speed of the Magnetic Actuated Microrobot
| Microrobot | Electromagnet Actuated Microrobot | Permanent Magnetic Actuated Microrobot |
|---|---|---|
| Actuator | Three-pole rotor | O-ring type magnet |
| Driving mode | Static magnetic field | Rotating magnetic field |
| Helmholtz coils | Helmholtz coil with iron core | Helmholtz coil without iron core |
| Speed control | Adjusting the strength of magnetic field | Adjusting the changing frequency of magnetic field |
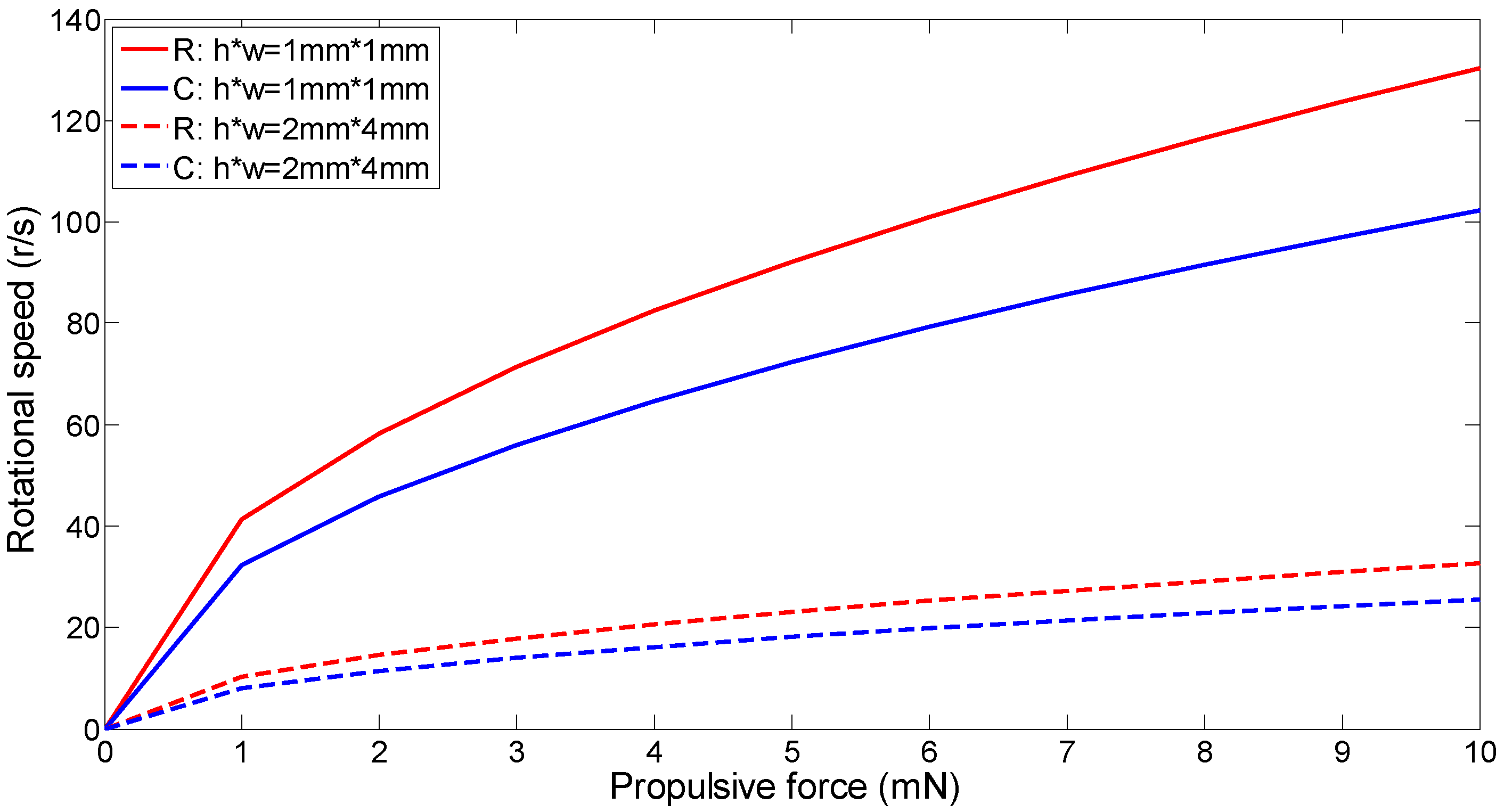
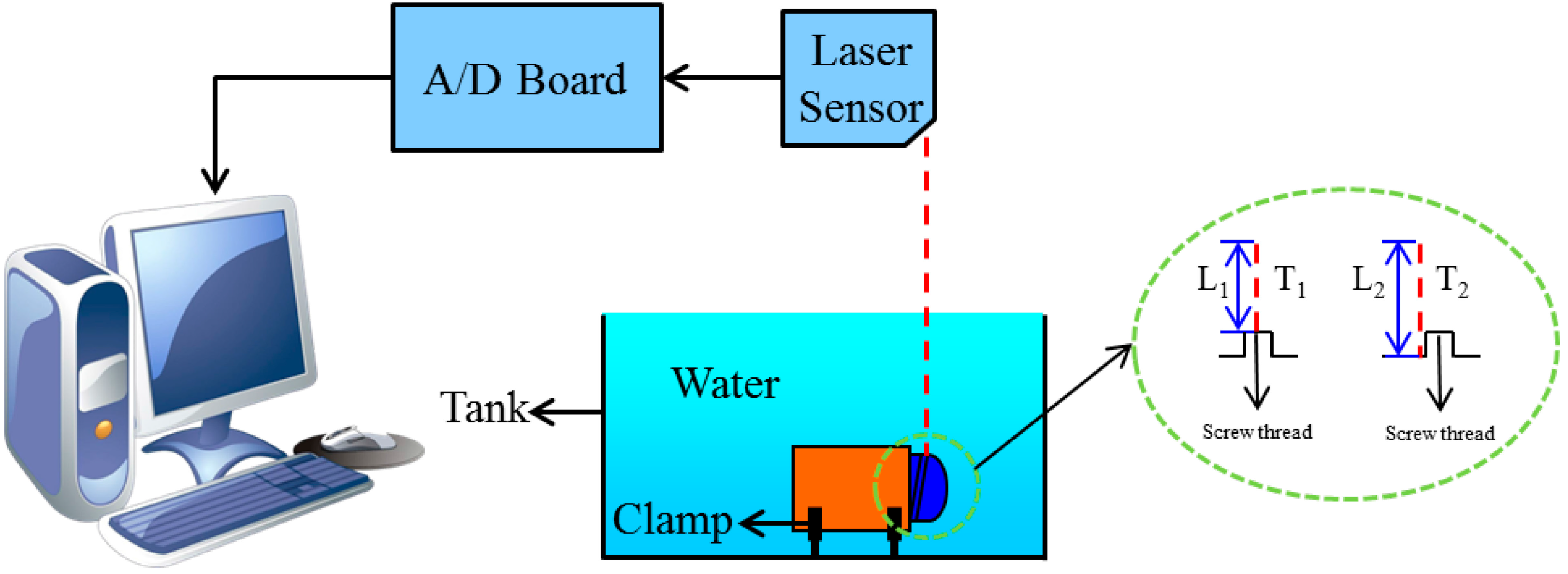
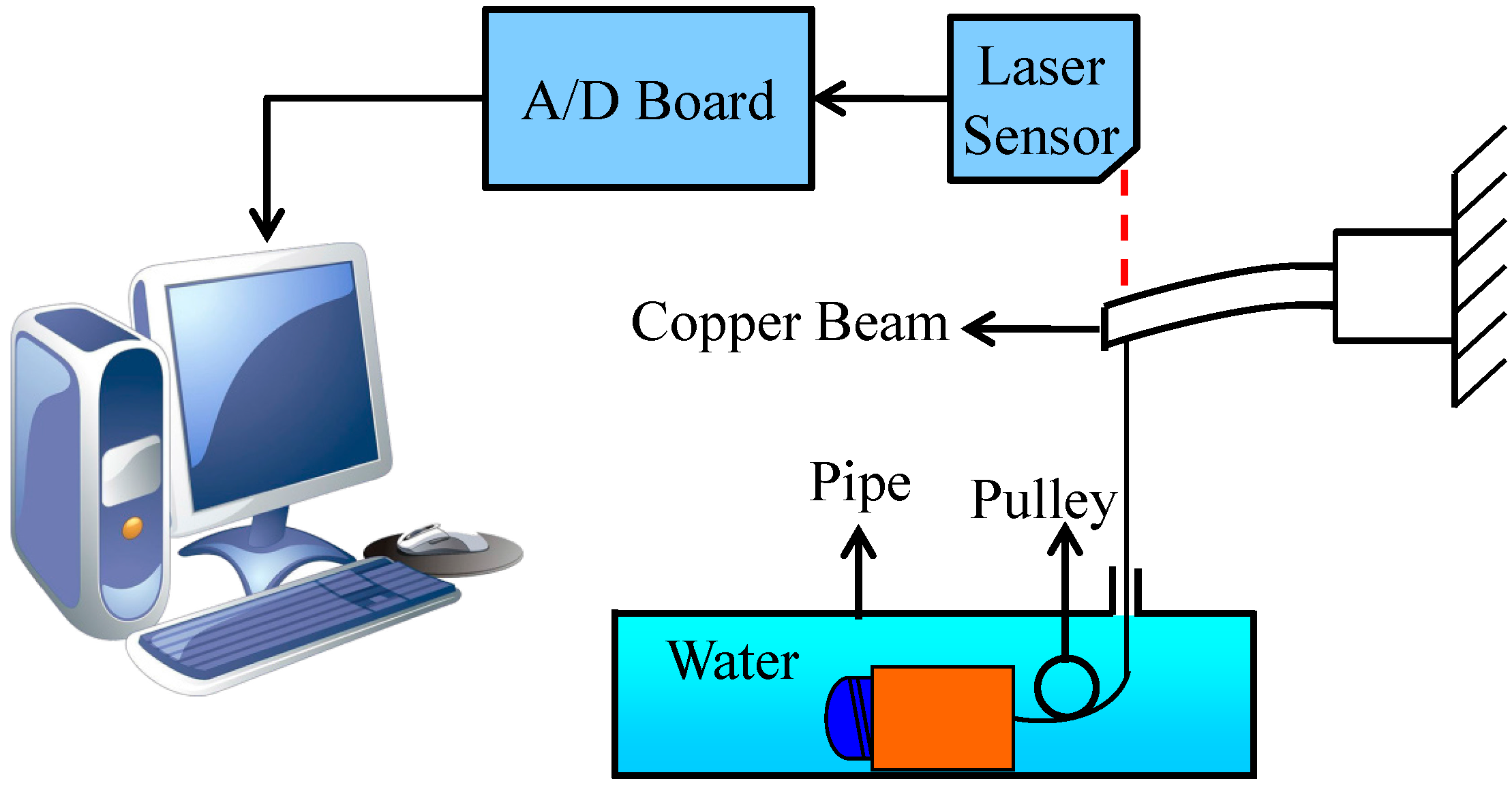
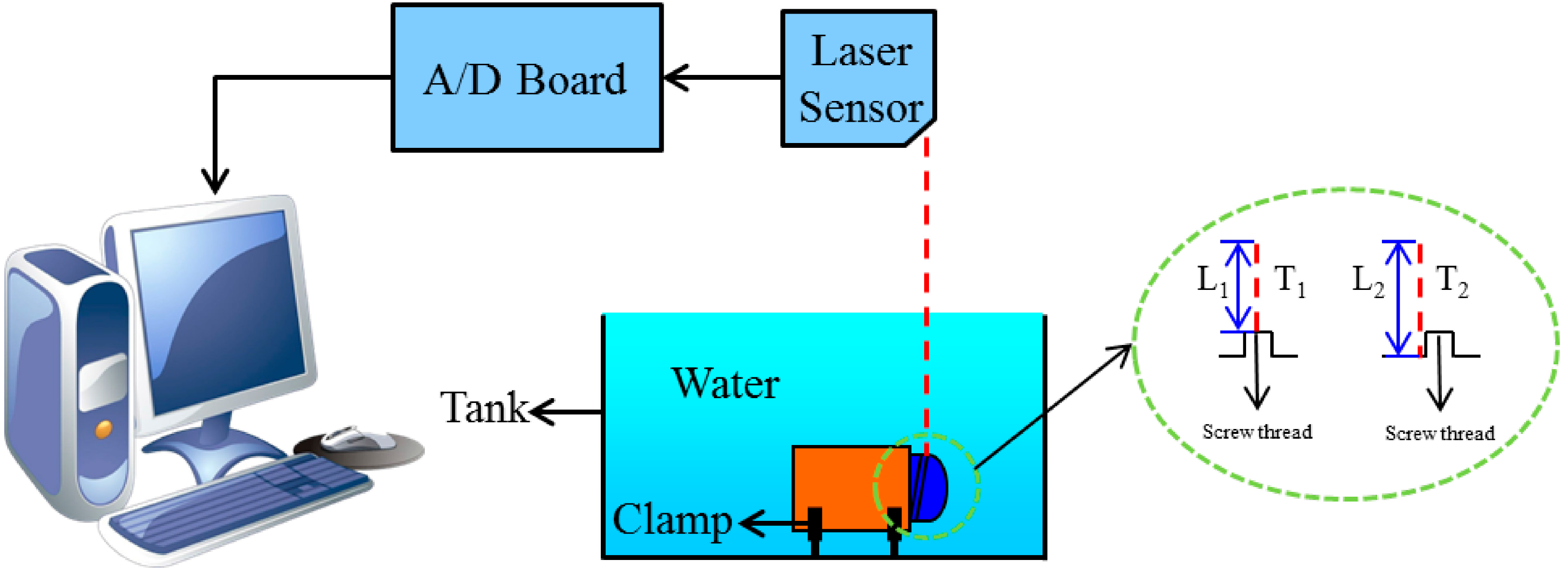
5.3. Measurement of Propulsive Force of the Magnetic Actuated Microrobot
5.4. Results and Discussions
6. Conclusions
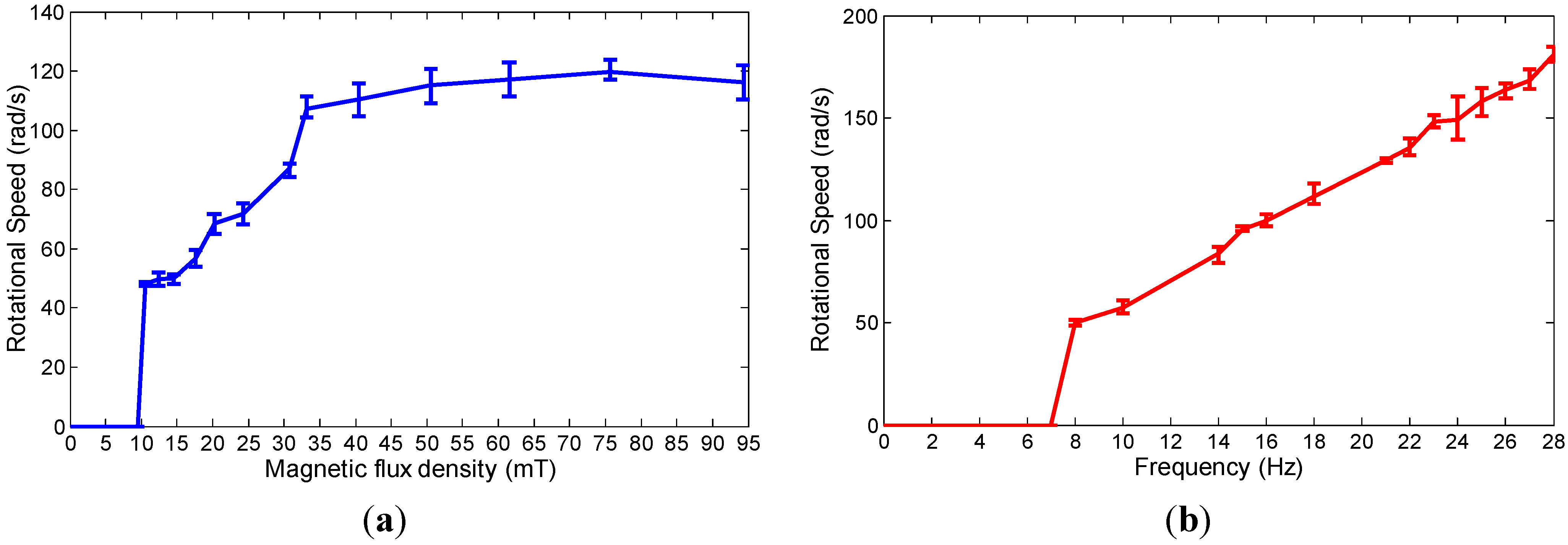
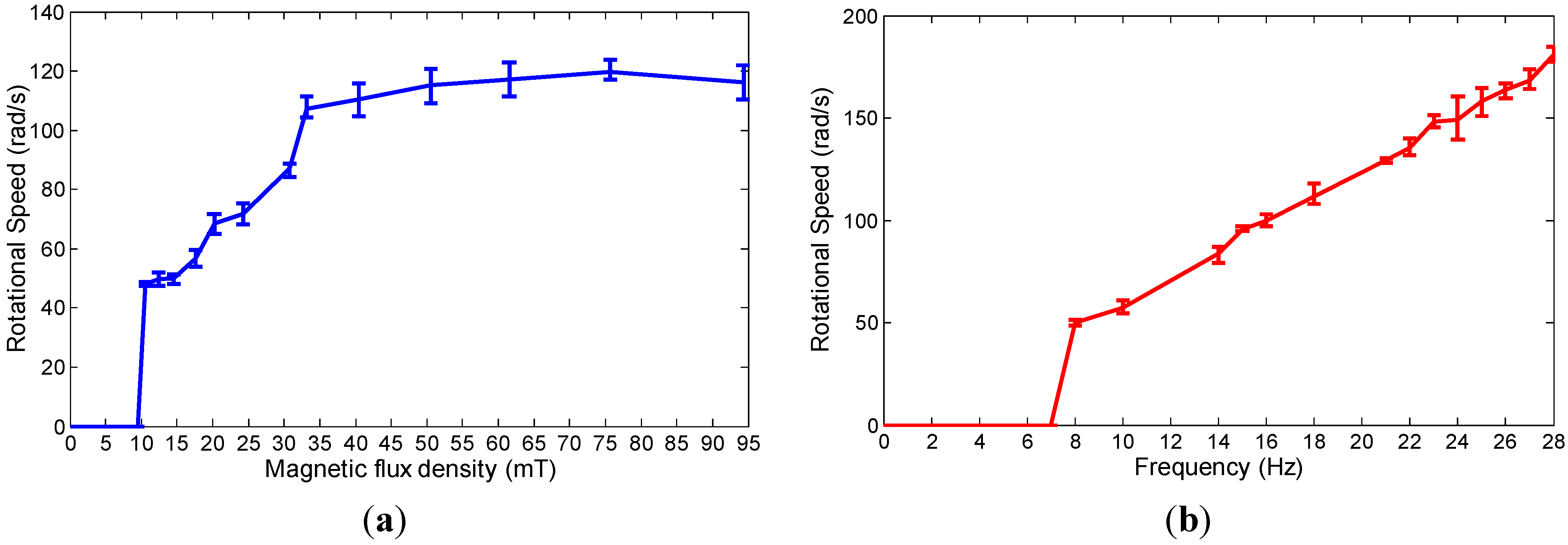
- The electromagnetic actuated microrobot is driven by a static magnetic field generated by a Helmholtz coil with an iron core. By adjusting the strength of the magnetic field from 0 to 95 mT, the microrobot can obtain a rotational speed of 0 to 120 rad/s.
- The permanent magnetic actuated microrobot is driven by a rotating magnetic field generated by Helmholtz coils without an iron core. By adjusting the frequency of the magnetic field from 0 to 28 Hz, the microrobot can obtain a rotational speed of 0 to 180 rad/s.
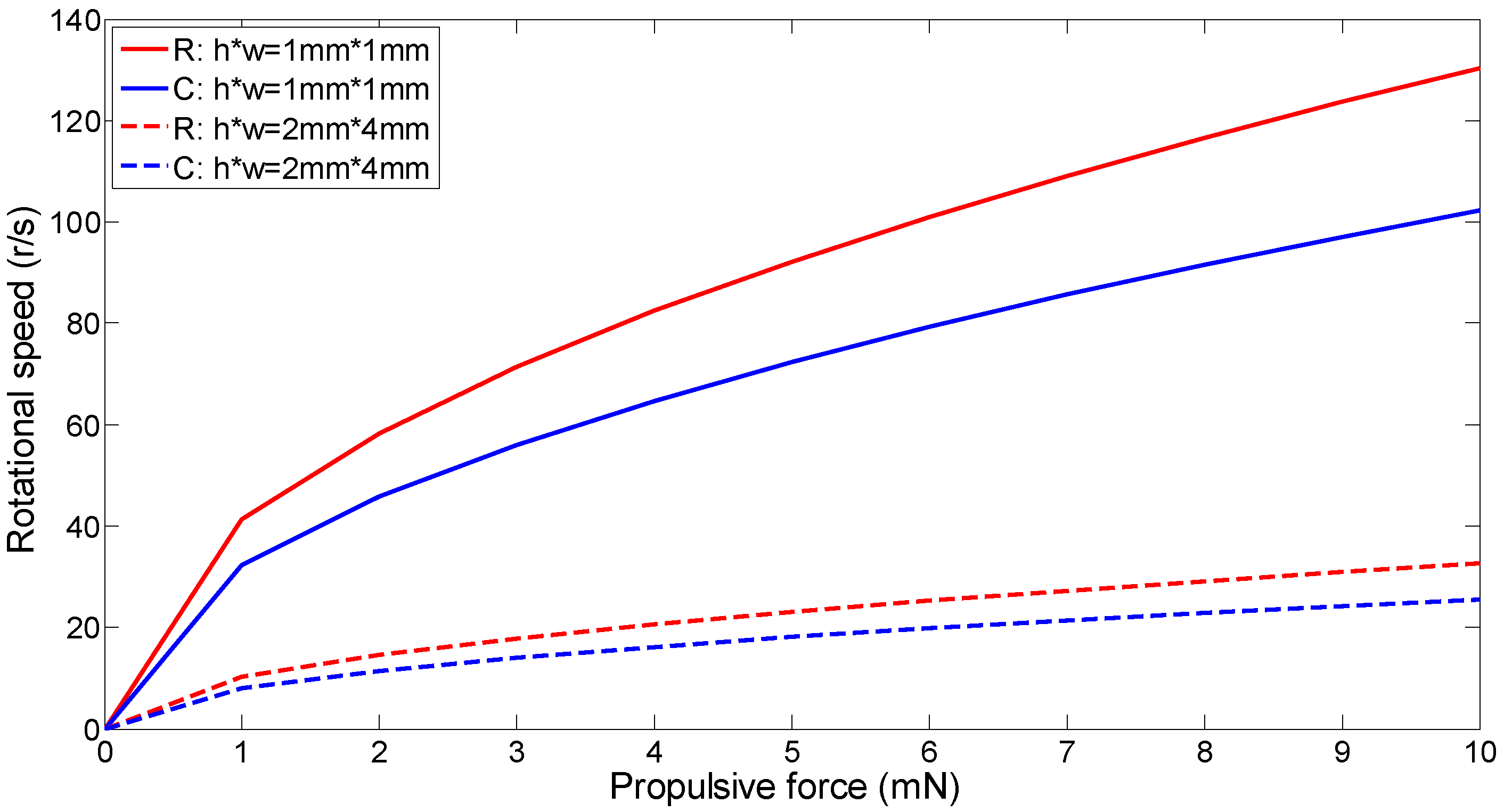
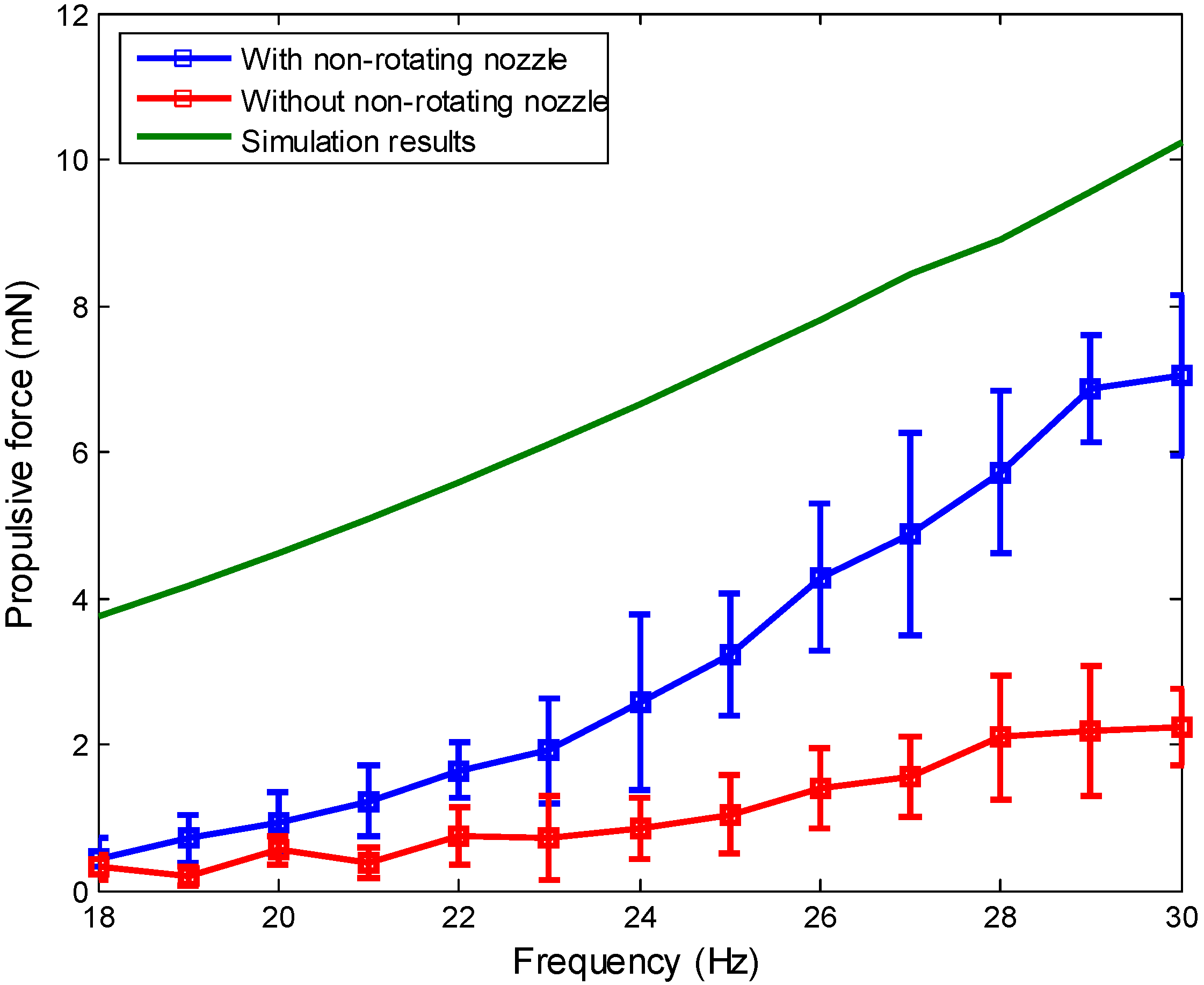
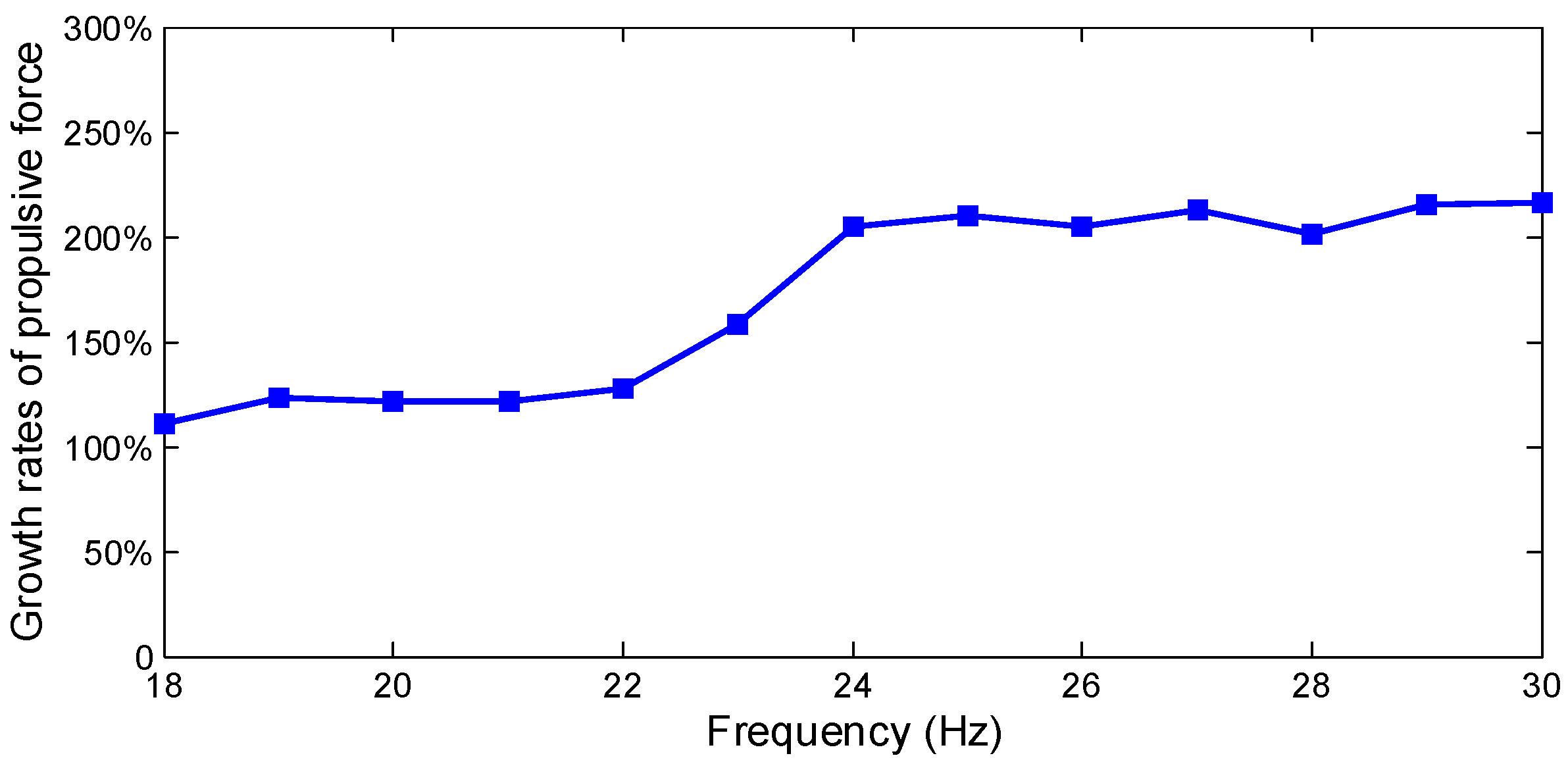
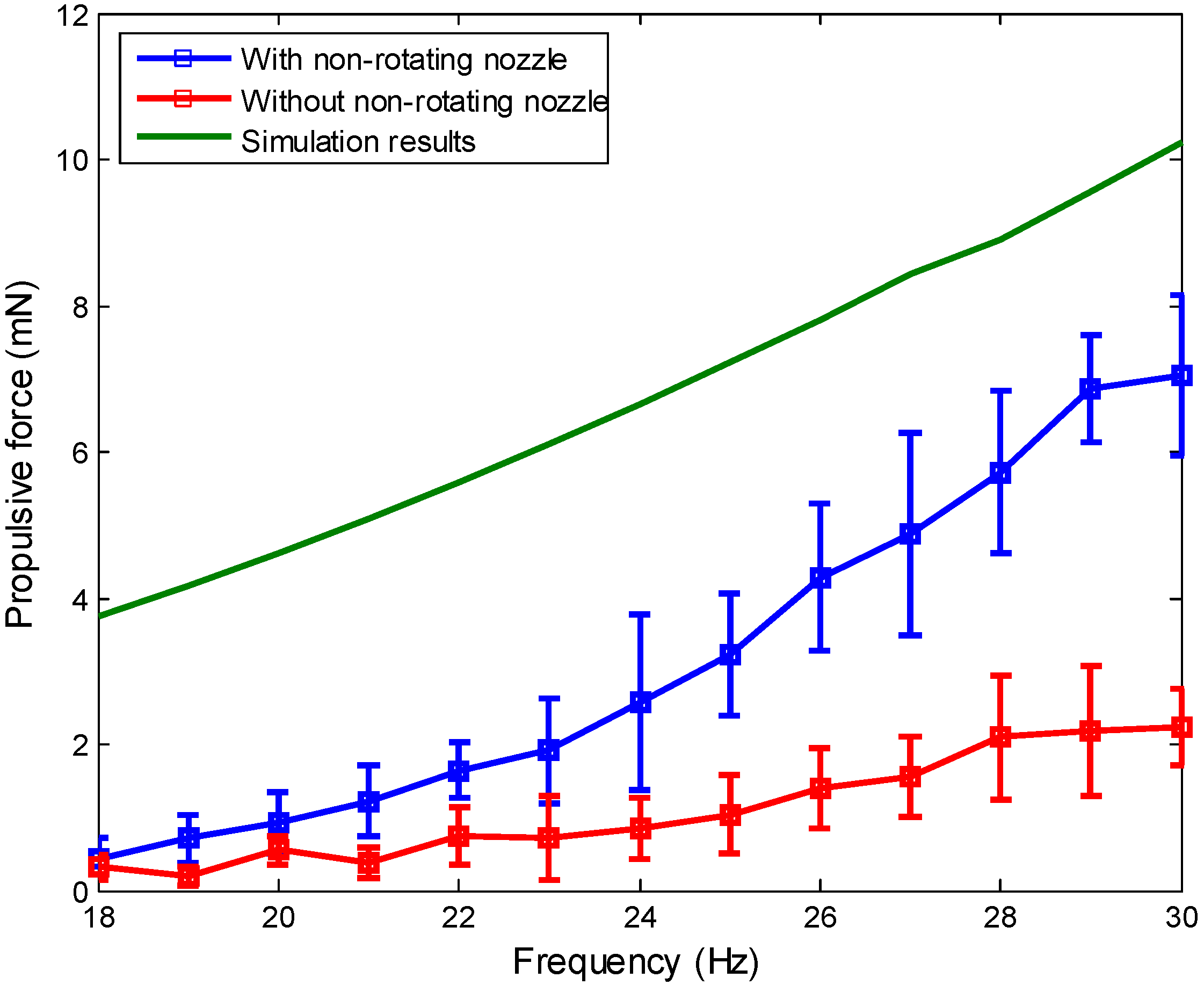
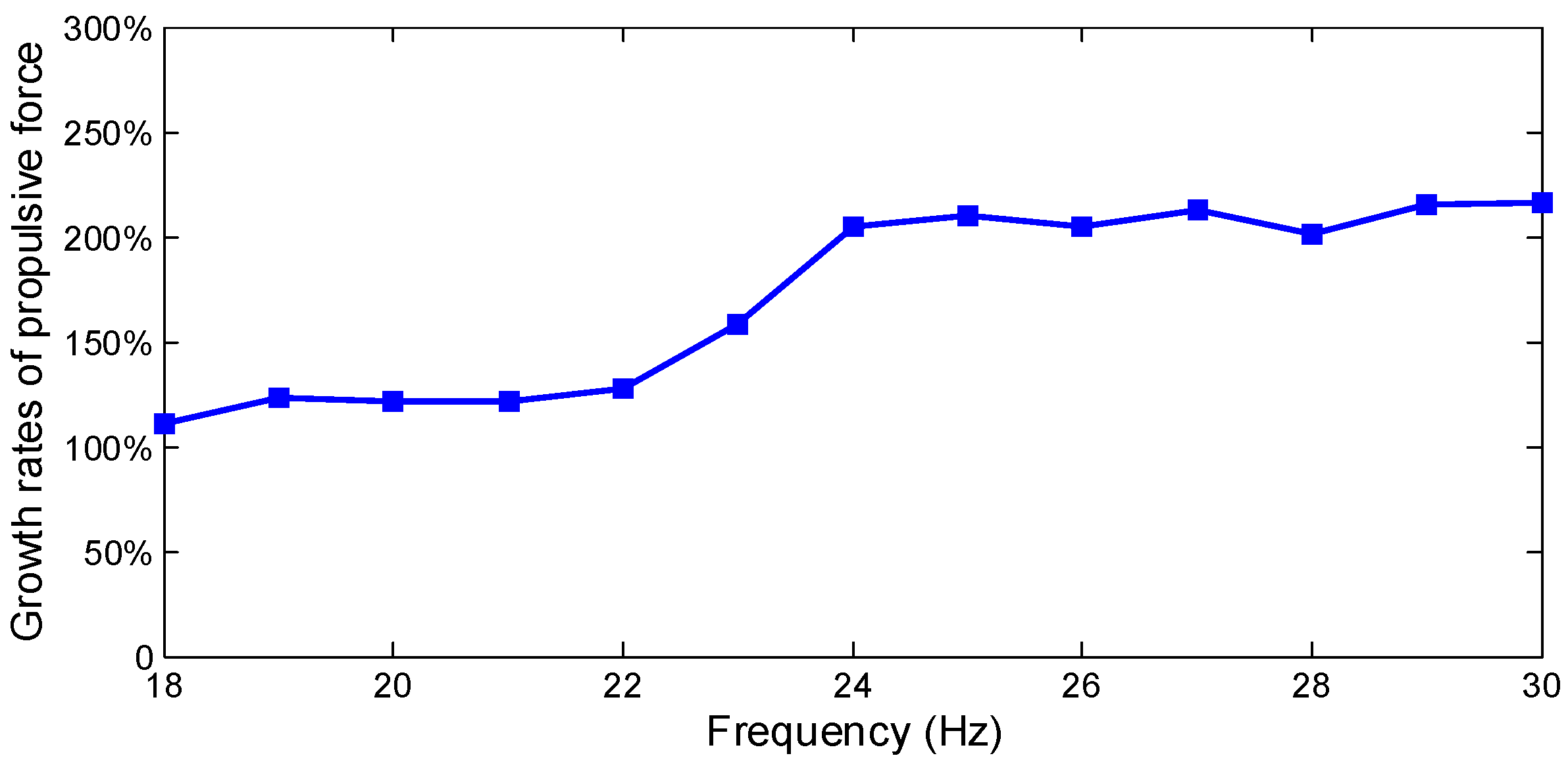
- The microrobot with a non-rotating nozzle generated a propulsive force greater than the microrobot without a non-rotating nozzle under the same conditions.
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Honda, T.; Sakashita, T.; Narahashi, K.; Yamasaki, J. Swimming properties of a bending-type magnetic micro-machine. J. Magn. Soc. Japan 2001, 25, 1175–1178. [Google Scholar] [CrossRef]
- Ishiyama, K.; Sendoh, M.; Yamazaki, A.; Arai, K.I. Swimming micromachine driven by magnetic torque. Sens. Actuators A Phys. 2001, 19, 141–144. [Google Scholar] [CrossRef]
- Guo, S.; Fukuda, T.; Asaka, K. Fish-like underwater microrobot with 3 DOF. IEEE Int. Conf. Robot. Autom. 2002, 1, 738–743. [Google Scholar]
- Guo, S.; Fukuda, T.; Asaka, K. A new type of fish-like underwater microrobot. IEEE ASME Trans. Mechatron. 2003, 8, 136–141. [Google Scholar]
- Ciuti, G.; Salerno, M.; Lucarini, G.; Valdastri, P.; Arezzo, A.; Menciassi, A.; Morino, M.; Dario, P. A comparative evaluation of control interfaces for a robotic-aided endoscopic capsule platform. IEEE Trans. Robot. 2012, 28, 534–538. [Google Scholar]
- Gao, B.; Guo, S.; Ye, X. Motion-control analysis of ICPF-actuated underwater biomimetic microrobots. Int. J. Mechatron. Autom. 2011, 1, 79–89. [Google Scholar] [CrossRef]
- Valdastri, P.; Sinibaldi, E.; Caccavaro, S.; Tortora, G.; Menciassi, A.; Dario, P. A novel magnetic actuation system for miniature swimming robots. IEEE Trans. Robot. 2011, 27, 769–779. [Google Scholar] [CrossRef]
- Nelson, B.J.; Kaliakatsos, I.K.; Abbott, J.J. Microrobots for minimally invasive medicine. Annu. Rev. Biomed. Eng. 2010, 12, 55–85. [Google Scholar] [CrossRef] [PubMed]
- Yu, C.; Kim, J.; Choi, H.; Choi, J.; Jeong, S.; Cha, K.; Park, J.; Park, S. Novel electromagnetic actuation system for three-dimensional locomotion and drilling of intravascular microrobot. Sens. Actuators Phys. 2010, 161, 297–304. [Google Scholar] [CrossRef]
- Fountain, T.W.R.; Kailat, P.V.; Abbott, J.J. Wireless Control of Magnetic Helical Microrobots using a Rotating-Permanent-Magnet Manipulator. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 576–581.
- Yim, S.; Sitti, M. Design and Rolling Locomotion of a Magnetically Actuated Soft Capsule Endoscope. Trans. Robot. 2012, 28, 183–193. [Google Scholar] [CrossRef]
- Khamesee, M.B.; Kato, N.; Nomura, Y.; Nakamura, T. Design and control of a microrobotic system using magnetic levitation. IEEE ASME Trans. Mechatron. 2002, 7, 1–14. [Google Scholar] [CrossRef]
- Lewis, B.S. Small intestinal bleeding. Gastroenterol. Clin. North Am. 2000, 29, 67–95. [Google Scholar] [CrossRef]
- Meron, G.D. The development of the swallowable video capsule (M2A). Gastrointest. Endosc. 2000, 52, 817–819. [Google Scholar] [CrossRef] [PubMed]
- Glozman, D.; Shoham, M.; Fischer, A. A Surface-Matching Technique for Robot-Assisted Registration. J. Comput. Aided Surg. 2001, 6, 259–269. [Google Scholar] [CrossRef]
- Fu, Q.; Guo, S.; Yamauchi, Y. A control system of the wireless microrobots in Pipe. In Proceedings of the 2014 IEEE International Conference on Mechatronics and Automation, Tianjin, China, 3–6 August 2014; pp. 1995–2000.
- Okada, T.; Guo, S.; Nan, X.; Fu, Q.; Yamauchi, Y. Control of the wireless microrobot with multi-DOFs locomotion for medical applications. In Proceedings of the 2012 IEEE International Conference on Mechatronics and Automation, Chengdu, China, 5–8 August 2012; pp. 2405–2410.
- Shin, B.H.; Lee, K.; Kim, Y. Miniaturized Dual Electromagnetic Oscillatory Actuator for Legged Locomotion of Micro Mobile Robots. Int. J. Control Autom. 2014, 7, 245–256. [Google Scholar] [CrossRef]
- Fatikow, S.; Seyfried, J.; Buerkle, A.; Schmoeckel, F. A flexible microrobot-based microassembly station. J. Int. Robot. Syst. 2000, 27, 135–169. [Google Scholar] [CrossRef]
- Horodinca, M.; Doroftei, I.; Mignon, E.; Preumont, A. A simple architecture for in-pipe inspection robots. In Proceedings of the International Colloquium on Autonomous and Mobile Systems, Magdeburg, Germany, 24–27 June 2002; pp. 61–64.
- Choi, H.R.; Ryew, S.M. Robotic system with active steering capability for internal inspection of urban gas pipelines. Mechatronic 2002, 12, 713–736. [Google Scholar] [CrossRef]
- Neubauer, W. A spider-like robot that climbs vertically in ducts or pipes. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Munich, German, 12–16 September 1994; pp. 1178–1185.
- Fischer, P.; Ghosh, A. Magnetically actuated propulsion at low Reynolds numbers: Towards nanoscale control. Nanoscale 2011, 3, 557–563. [Google Scholar] [CrossRef] [PubMed]
- Dogangil, G.; Davies, B.L.; Y Baena, F.R. A review of medical robotics for minimally invasive soft tissue surgery. J. Eng. Med. 2010, 224, 653–679. [Google Scholar] [CrossRef]
- Capsule Endoscope Norika. Available online: http://rfsystemlab.com/sayaka/norika/system/001.html (accessed on 9 October 2013).
- Pan, Q.; Guo, S.; Okada, T. A Novel Hybrid Wireles Microrobot. Int. J. Mechatron. Autom. 2011, 1, 60–69. [Google Scholar] [CrossRef]
- Desai, J.P.; Pillarisetti, A.; Brooks, A.D. Engineering approaches to biomanipulation. Annu. Rev. Biomed. Eng. 2007, 9, 35–53. [Google Scholar] [CrossRef] [PubMed]
- Zarrouk, D.; Shoham, M. Analysis and Design of One Degree of Freedom Worm Robots for Locomotion on Rigid and Compliant Terrain. J. Mech. Des. 2012, 134, 1–9. [Google Scholar] [CrossRef]
- Deiva, G.A. Design of Micro Robot for Minimally Invasive Surgery. Int. J. Robot. Autom. 2013, 2, 35–44. [Google Scholar]
- Kummer, M.P.; Abbott, J.J.; Kratochvil, B.E.; Borer, R.; Sengul, A.; Nelson, B.J. OctoMag: An electromagnetic system for 5-DOF wireless micromanipulation. IEEE Trans. Robot. 2010, 26, 1006–1017. [Google Scholar] [CrossRef]
- Pan, Q.; Guo, S. A Paddling Type of Microrobot in Pipe. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 2995–3000.
- Fu, Q.; Guo, S.; Yamauchi, Y.; Hirata, H.; Ishihara, H. A Novel Hybrid Microrobot using Rotational Magnetic Field for Medical Applications. Biomed. Microdevices 2015, 17, 1–12. [Google Scholar] [CrossRef] [PubMed]
- Zhang, L.; Abbott, J.J.; Dong, L.X.; Peyer, K.E.; Kratochvil, B.E.; Zhang, H.X.; Bergeles, C.; Nelson, B.J. Characterizing the Swimming Properties of Artificial Bacterial Flagella. Nano Lett. 2009, 9, 3663–3667. [Google Scholar] [CrossRef] [PubMed]
- Pan, Q.; Guo, S.; Li, D. Mechanism and Control of a Spiral Type of Microrobot in Pipe. In Proceedings of the 2008 IEEE International Conference on Robotics and Biomimetics, Bangkok, Thailand, 22–25 February 2009; pp. 43–48.
- Zhang, Y.; Jiang, S.; Zhang, X.; Ruan, X.; Guo, D. A variable-diameter capsule robot based on multiple wedge effects. IEEE ASME Trans. Mechatron. 2011, 16, 241–254. [Google Scholar] [CrossRef]
- Rorres, C. The turn of the screw: Optimal design of an Archimedes screw. J. Hydraul. Eng. 2000, 126, 72–80. [Google Scholar] [CrossRef]
- Yin, X.; Guo, S.; Hirata, H.; Ishihara, H. Design and Experimental Evaluation of a Teleoperated Haptic Robot Assisted Catheter Operating System. J. Int. Mater. Syst. Struct. 2014. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fu, Q.; Guo, S.; Zhang, S.; Hirata, H.; Ishihara, H. Characteristic Evaluation of a Shrouded Propeller Mechanism for a Magnetic Actuated Microrobot. Micromachines 2015, 6, 1272-1288. https://doi.org/10.3390/mi6091272
Fu Q, Guo S, Zhang S, Hirata H, Ishihara H. Characteristic Evaluation of a Shrouded Propeller Mechanism for a Magnetic Actuated Microrobot. Micromachines. 2015; 6(9):1272-1288. https://doi.org/10.3390/mi6091272
Chicago/Turabian StyleFu, Qiang, Shuxiang Guo, Songyuan Zhang, Hideyuki Hirata, and Hidenori Ishihara. 2015. "Characteristic Evaluation of a Shrouded Propeller Mechanism for a Magnetic Actuated Microrobot" Micromachines 6, no. 9: 1272-1288. https://doi.org/10.3390/mi6091272