In-Pixel Temperature Sensors with an Accuracy of ±0.25 °C, a 3σ Variation of ±0.7 °C in the Spatial Domain and a 3σ Variation of ±1 °C in the Temporal Domain

Abstract
:1. Introduction
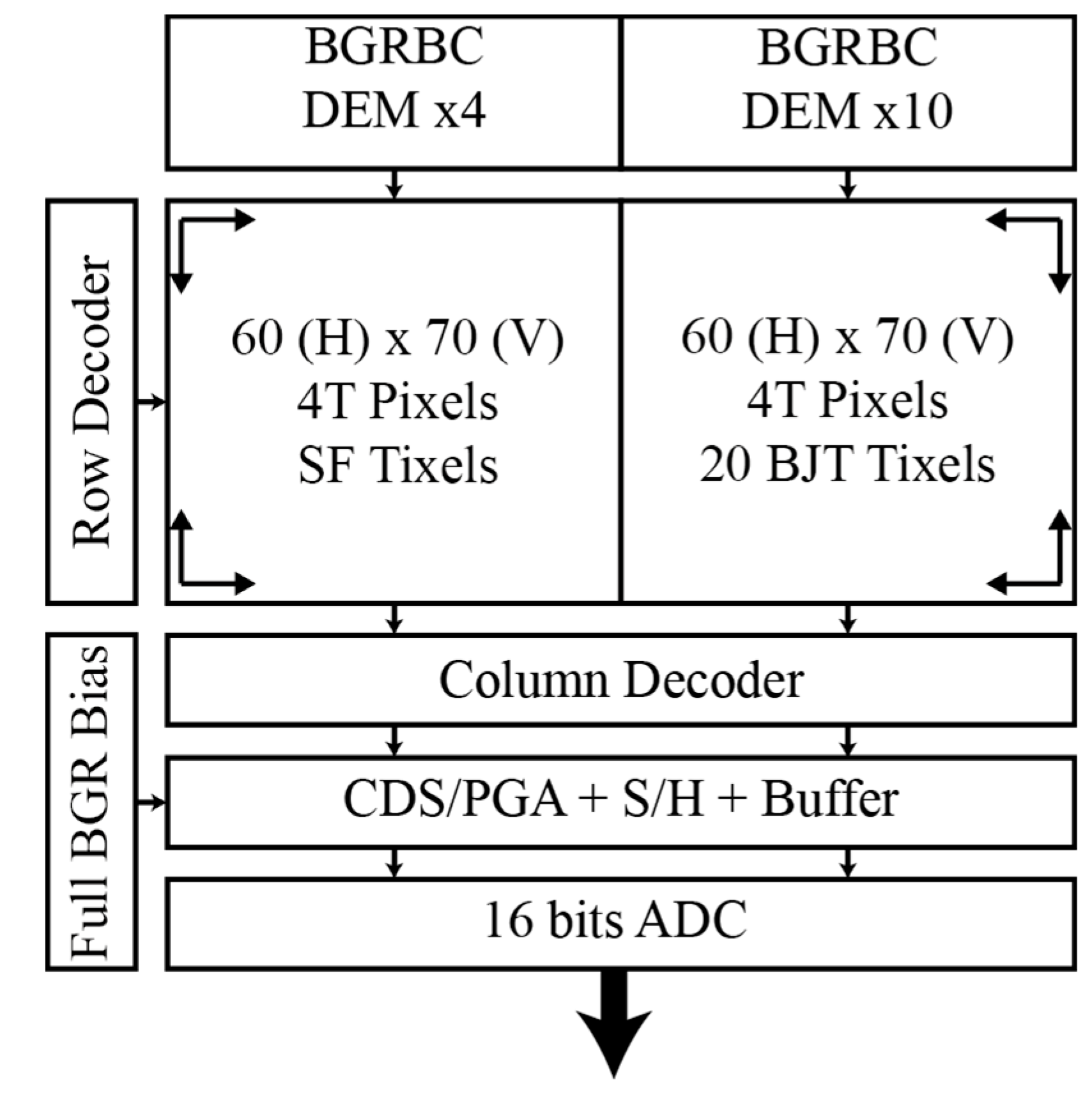
2. CMOS Image Sensor with In-Pixel Temperature Sensors
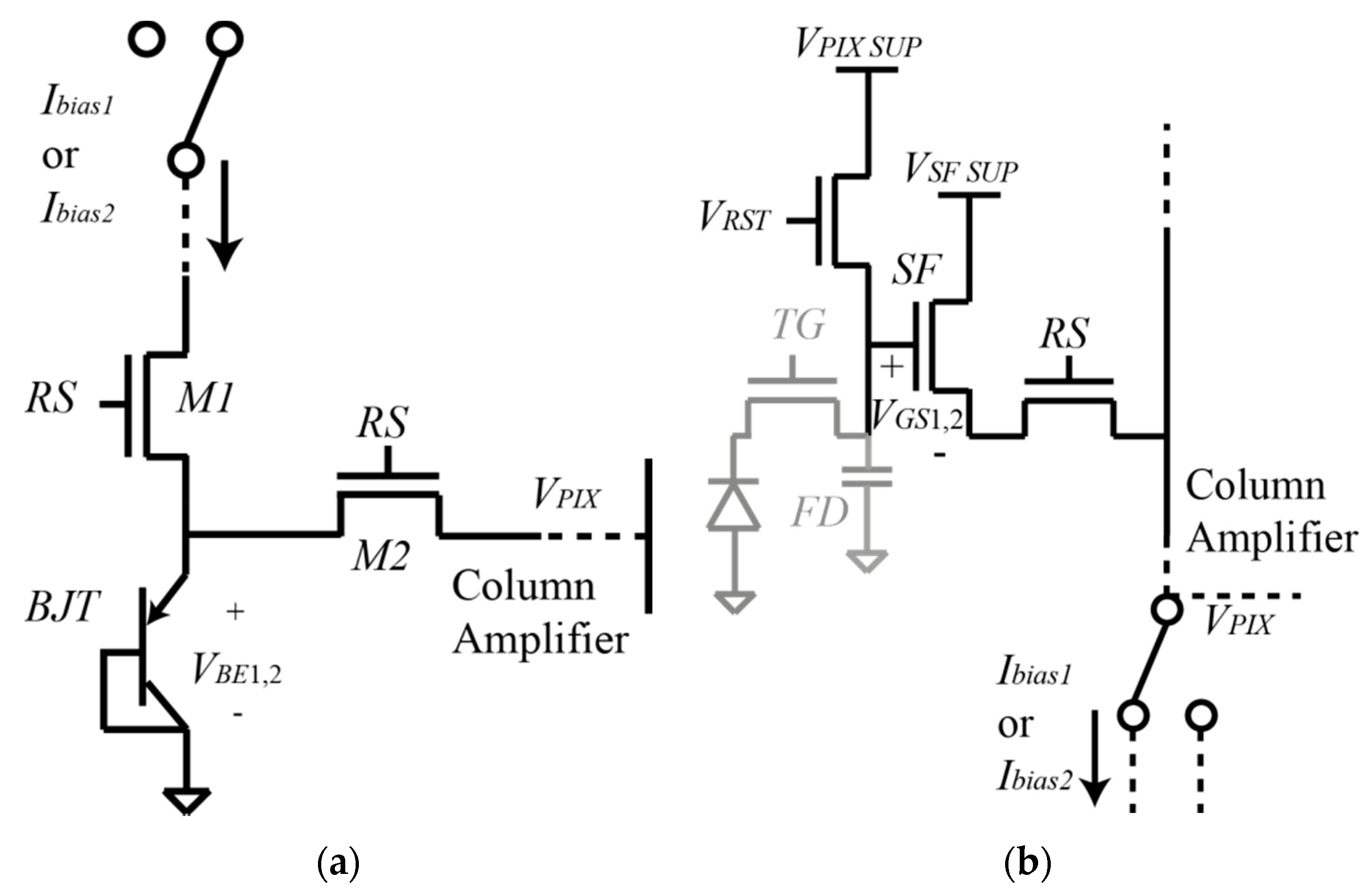
2.1. Parasitic Bipolar Temperature Sensor
2.2. nMOS Source Follower Temperature Sensor
3. Non-Linearities Affecting the Temperature Sensors
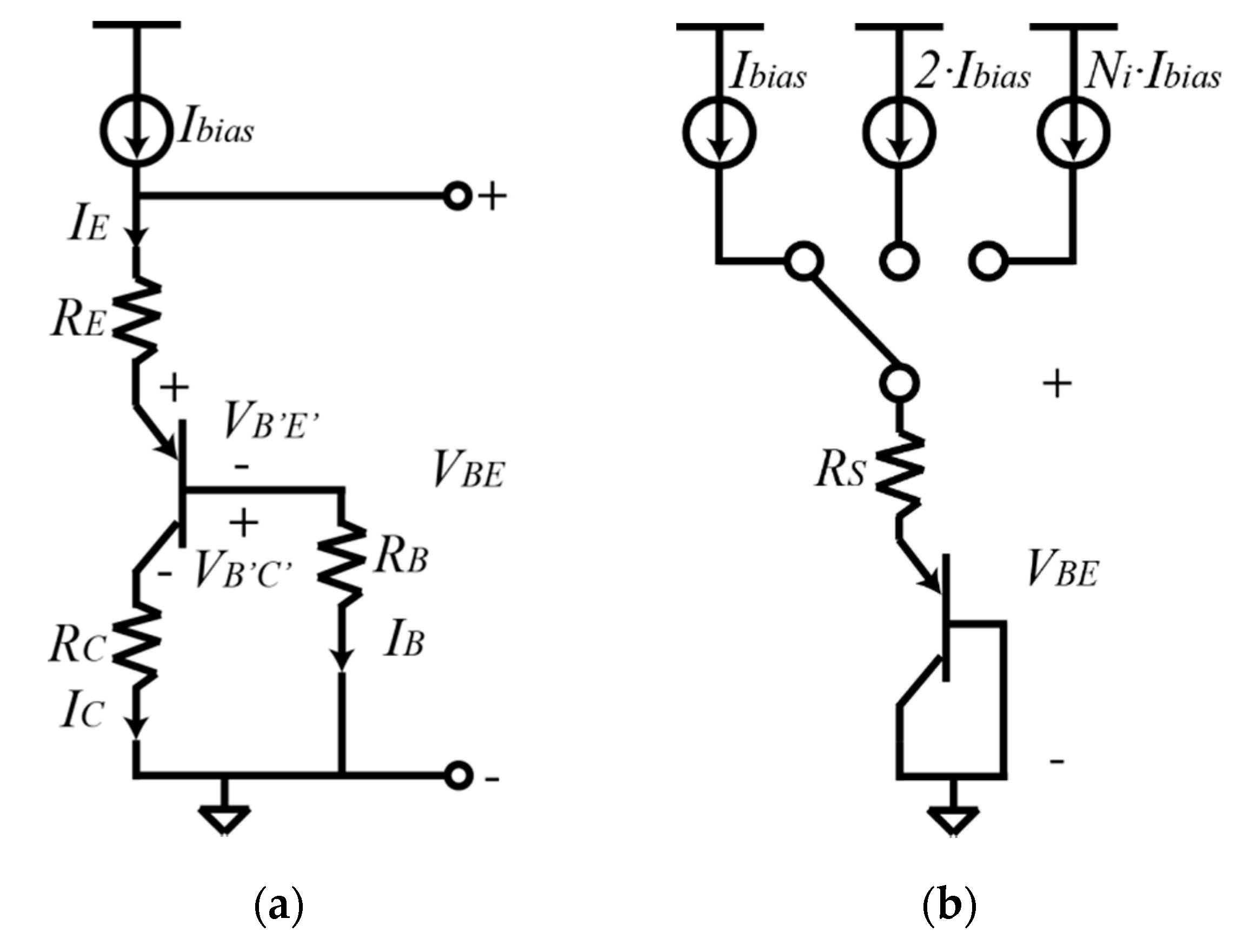
3.1. Sources of Inaccuracies in BJT
3.2. Sources of Inaccuracies in nMOS SF
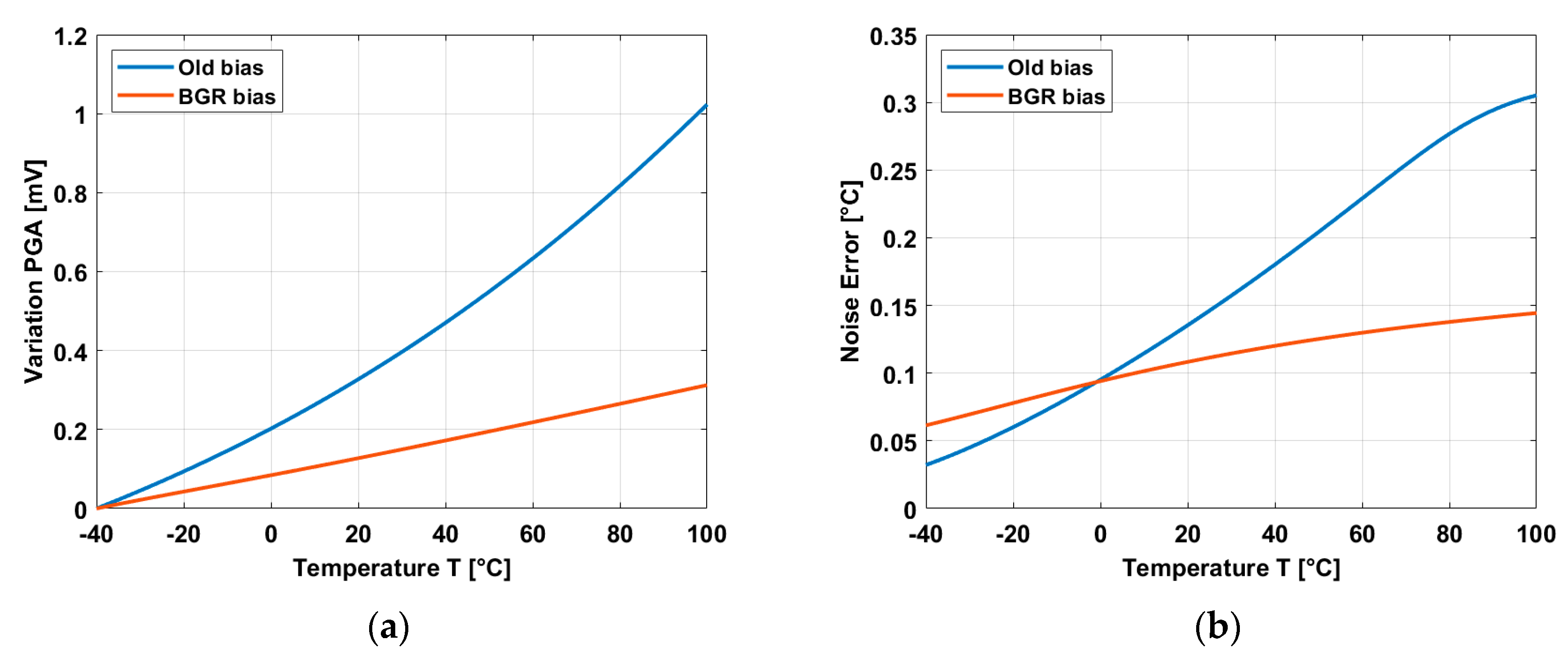
3.3. Sources of Inaccuracies of the Readout System
4. System Design
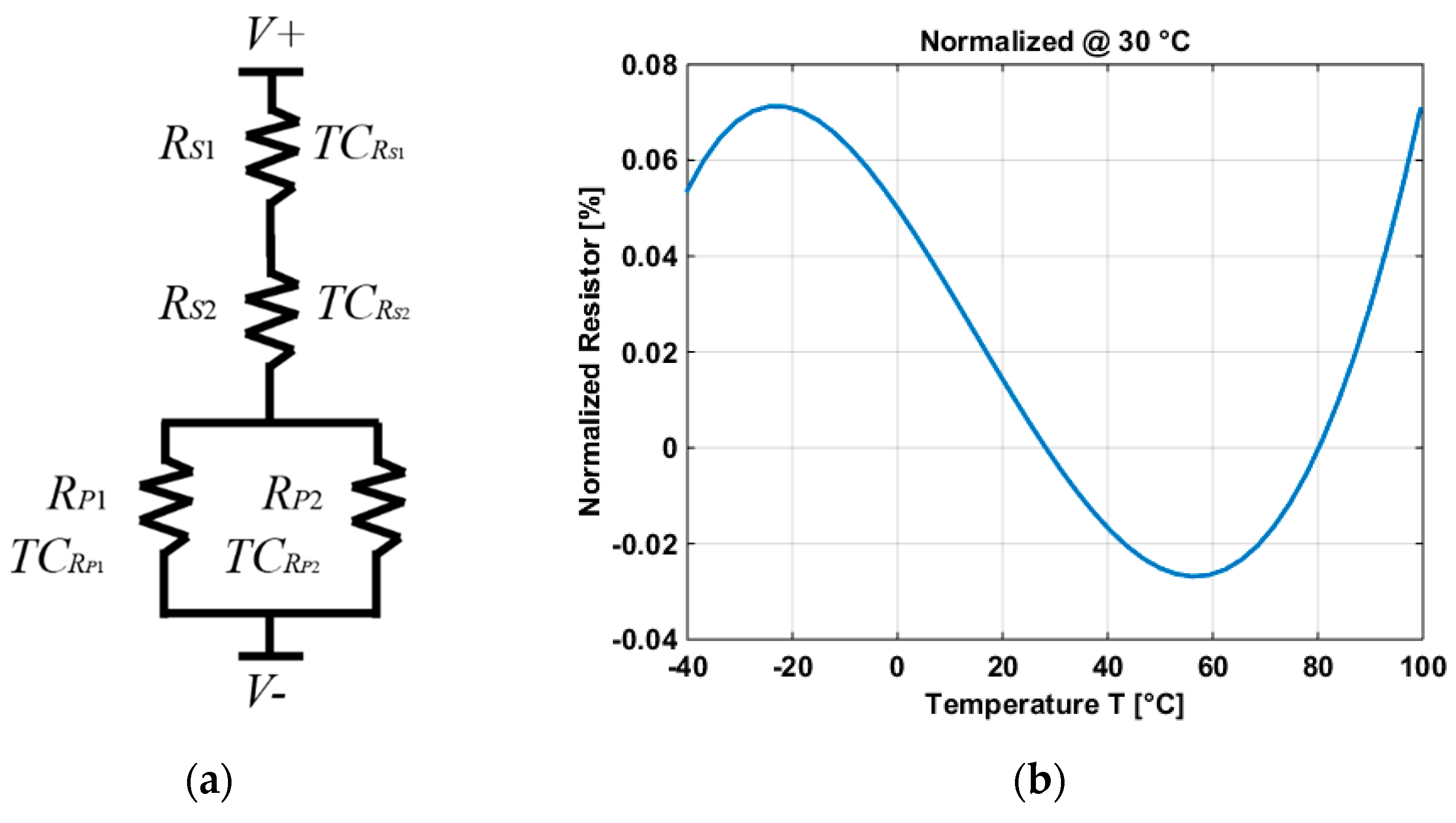
4.1. Temperature compensated Resistor
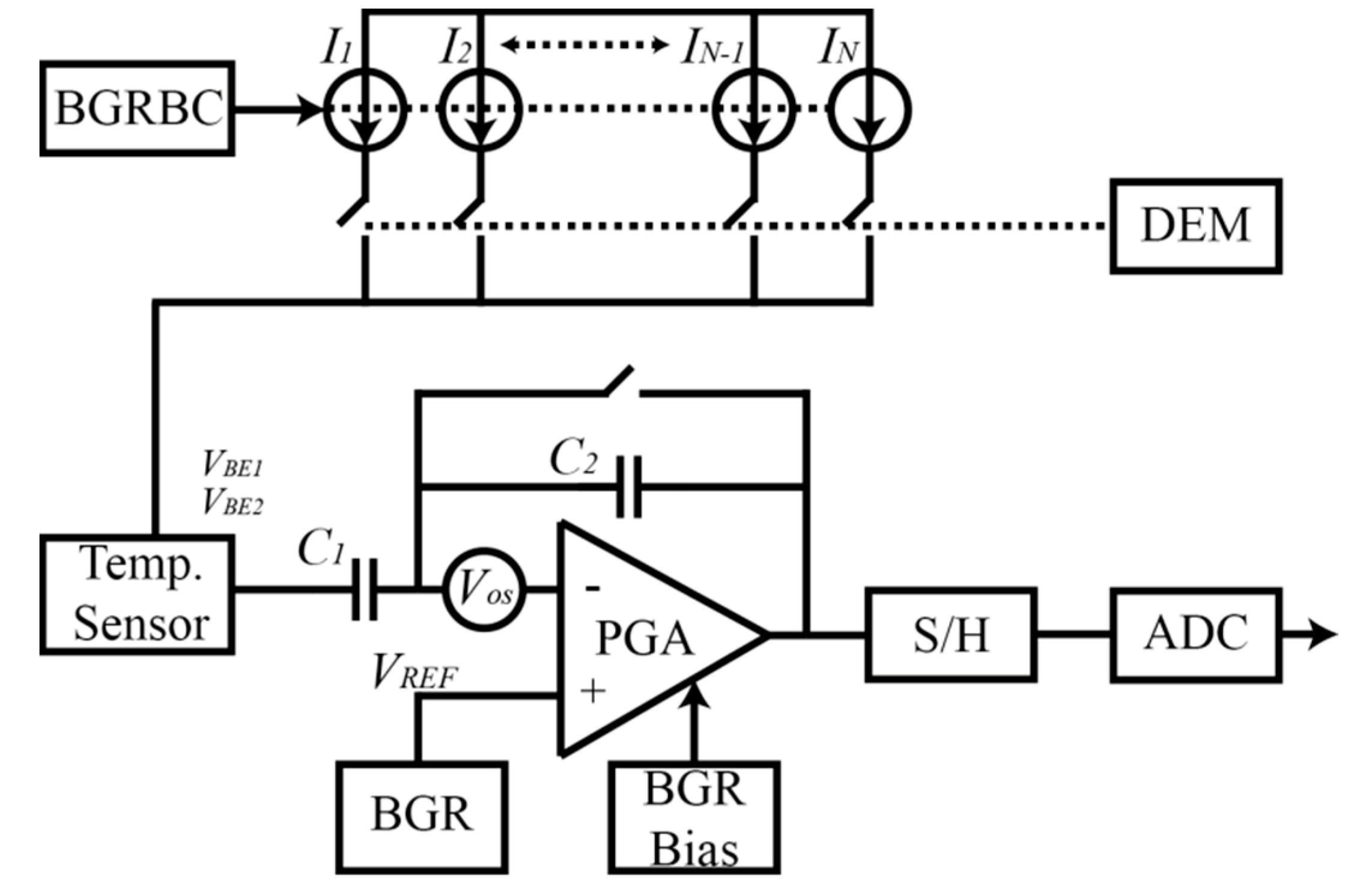
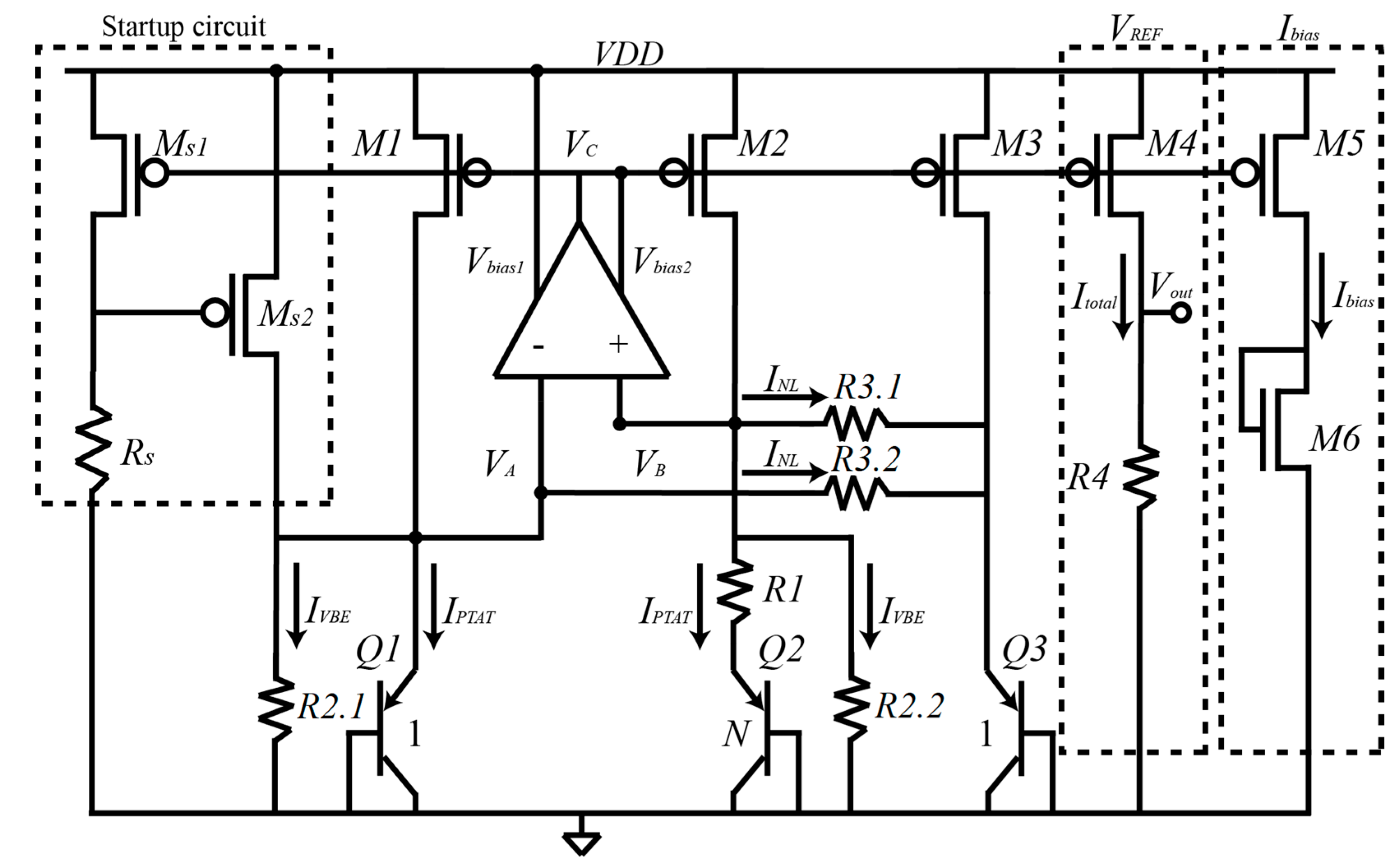
4.2. Bandgap Reference with Temperature Compensated Resistors
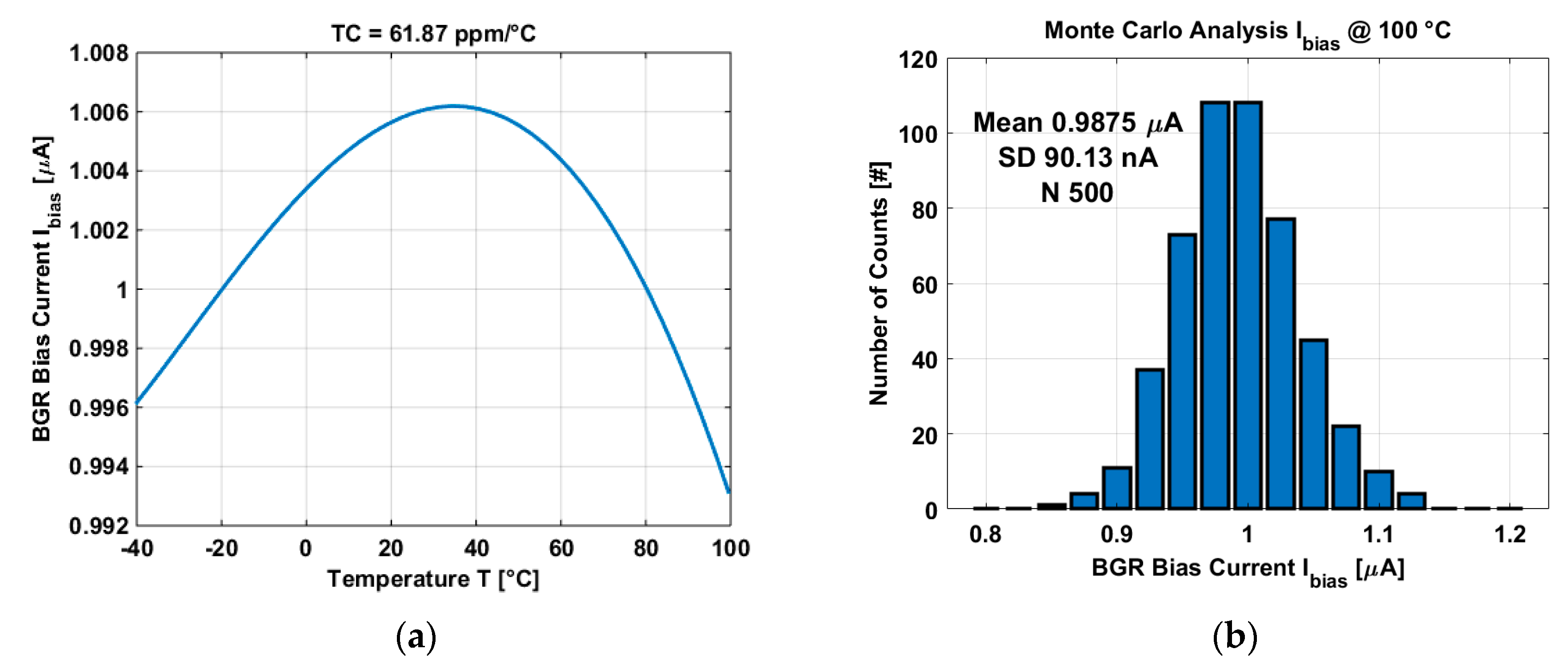
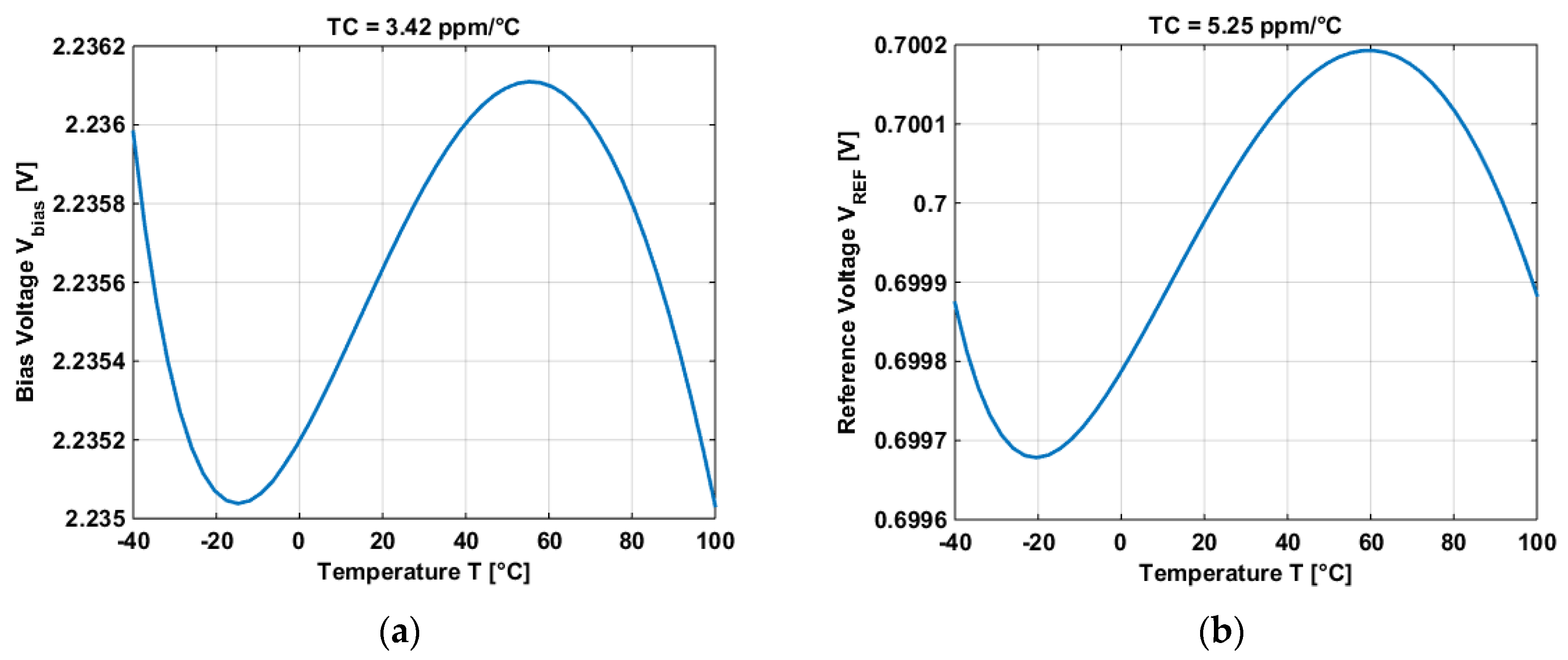
4.3. Post-Layout Simulations of the BGR Current and Voltages
5. Measurement Results and Discussion
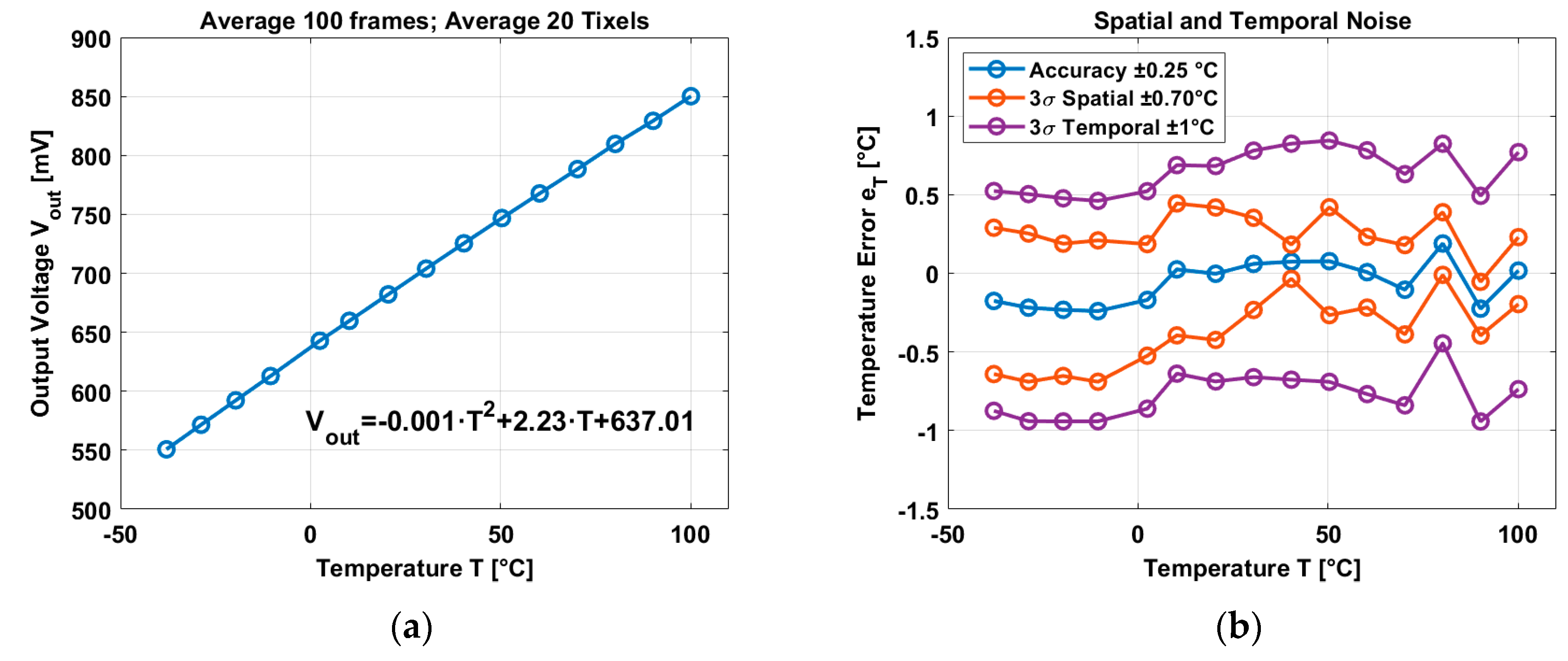
5.1. BJT Measurement Results
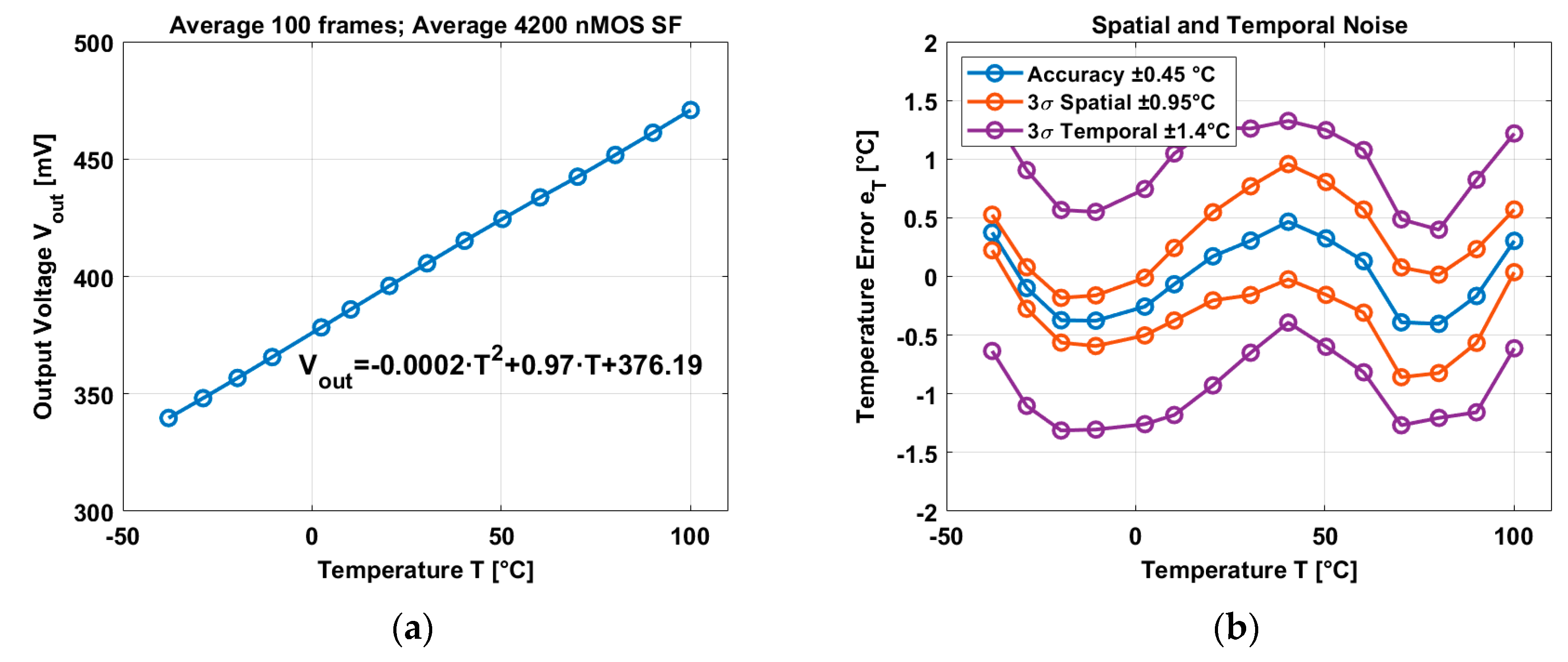
5.2. nMOS SF Measurement Results
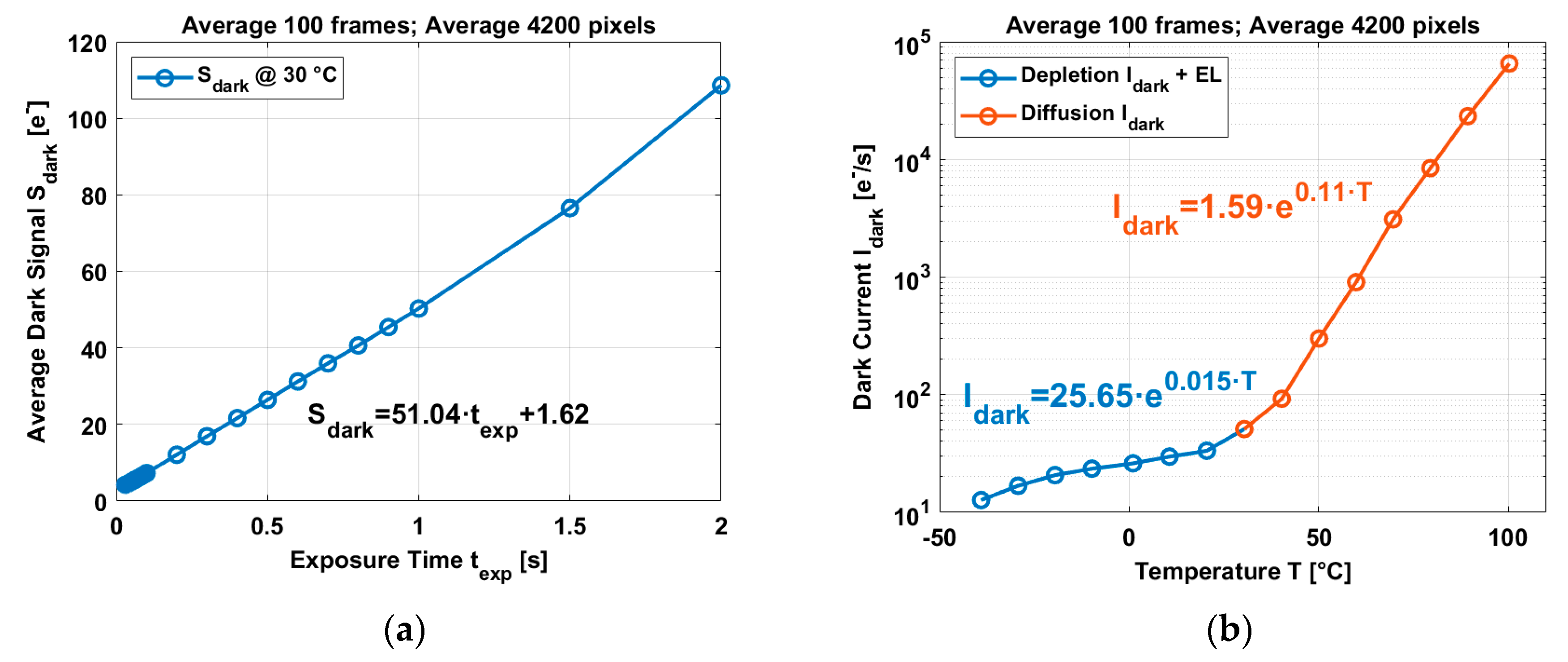
5.3. Dark Current Measurements
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Ay, S.U.; Lesser, M.P.; Fossum, E.R. CMOS active pixel sensor (APS) imager for scientific applications. In Survey and Other Telescope Technologies and Discoveries; SPIE the International Society for Optical Engineering: Waikoloa, HI, USA, 24 December 2002; Volume 4836, pp. 271–278. [Google Scholar] [CrossRef] [Green Version]
- Schanz, M.; Nitta, C.; Bubmann, A.; Hosticka, B.J.; Wertheimer, R.K. A high-dynamic-range CMOS image sensor for automotive applications. IEEE J. Solid-State Circuits 2000, 35, 932–938. [Google Scholar] [CrossRef]
- El Gamal, A.; Eltoukhy, H. CMOS image sensors. IEEE Circuits Syst. Mag. 2005, 21, 6–20. [Google Scholar] [CrossRef]
- Fossum, E.R. Active pixel sensors: Are CCDs dinosaurs. In Charge-Coupled Devices and Solid-State Optical Sensors III; International Society for Optics and Photonics: San Jose, CA, USA, 2 July 1993; Volume 1900, pp. 2–14. [Google Scholar] [CrossRef]
- Fossum, E.R. CMOS image sensors: Electronic camera on a chip. IEEE Trans. Electron. Devices 1997, 44, 1689–1698. [Google Scholar] [CrossRef]
- Ackland, B.; Dickinson, A. Camera-on-a-chip. In Proceedings of the ISSCC Digest of Technical Papers, San Francisco, CA, USA, 10 February 1996; pp. 22–25. [Google Scholar] [CrossRef]
- Wuu, S.-G.; Chien, H.-C.; Yaung, D.-N.; Tseng, C.-H.; Wang, C.S.; Chang, C.-K.; Hsaio, Y.-K. A high performance active pixel sensor with 0.18 µm CMOS color imager technology. In Proceedings of the IEDM Digest of Technical Papers, Washington, DC, USA, 2–5 December 2001; pp. 555–558. [Google Scholar] [CrossRef]
- Law, M.; Bermark, A.; Luong, H.C. A sub-μW embedded temperature sensor for RFID food monitoring application. IEEE J. Solid-State Circuits 2010, 45, 1246–1255. [Google Scholar] [CrossRef]
- Lin, Y.; Sylvester, D.; Blaauw, D. An ultra low power 1 V, 220 nW temperature sensor for passive wireless applications. In Proceedings of the IEEE Custom Custom Integrated Circuits Conference, San Jose, CA, USA, 21–24 September 2008; pp. 507–510. [Google Scholar] [CrossRef]
- Vaz, A.; Ubarretxena, A.; Zalbide, I.; Pardo, D.; Solar, H.; Garcia-Alonso, A.; Berenguer, R. Full Passive UHF Tag With a Temperature Sensor Suitable for Human Body Temperature Monitoring. IEEE Trans. Circuits Syst. II Express Briefs 2010, 57, 95–99. [Google Scholar] [CrossRef]
- Kwon, H.I.; Kang, I.M.; Park, B.-G.; Lee, J.D.; Park, S.S. The analysis of dark signals in the CMOS APS imagers from the characterization of test structures. IEEE Trans. Electron. Devices 2004, 51, 178–184. [Google Scholar] [CrossRef]
- Wang, X. Noise in Sub-Micron CMOS Image Sensors. Ph.D. Thesis, Delft University of Technology, Delft, The Netherlands, 3 November 2008; pp. 46–68. [Google Scholar]
- Baranov, P.S.; Litvin, V.T.; Belous, D.A.; Mantsvetov, A.A. Dark Current of the Solid-State Imagers at High Temperature. In Proceedings of the IEEE Conference of Russian Young Researchers in Electrical and Electronic Engineering (EIConRus), St Petersburg, Russia, 1–3 February 2017; pp. 635–638. [Google Scholar] [CrossRef]
- Widenhorn, R.; Blouke, M.M.; Weber, A.; Rest, A.; Bodegom, E. Temperature dependence of dark current in a CCD. In Sensors and Camera Systems for Scientific, Industrial, and Digital Photography Applications III; International Society for Optics and Photonics: San Jose, CA, USA, 24 April 2002; Volume 4669, pp. 193–201. [Google Scholar] [CrossRef] [Green Version]
- Han, S.-W.; Yoon, E. Low dark current CMOS image sensor pixel with photodiode structure enclosed by p-well. Electron. Lett. 2006, 42, 1145–1146. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Snoeij, M.F.; Rao, P.R.; Mierop, A.; Theuwissen, A.J. A CMOS image sensor with a buried-channel source follower. In Proceedings of the ISSCC Digest of Technical Papers, San Francisco, CA, USA, 3–7 February 2008; pp. 62–63. [Google Scholar] [CrossRef]
- Abarca, A.; Xie, S.; Markenhof, J.; Theuwissen, A. Integration of 555 temperature sensors into a 64 × 192 CMOS image sensor. Sens. Actuators A Phys. 2018, 282, 243–250. [Google Scholar] [CrossRef]
- Xie, S.; Abarca Prouza, A.; Theuwissen, A. A CMOS-Imager-Pixel-Based Temperature Sensor for Dark Current Compensation. IEEE Trans. Circuits Syst. II Express Briefs 2020, 67, 255–259. [Google Scholar] [CrossRef]
- Pertijs, M.A.P.; Makinwa, K.A.A.; Huijsing, J.H. A CMOS smart temperature sensor with a 3σ inaccuracy of ±0.1 °C from −55 °C to 125 °C. IEEE J. Solid-State Circuits 2005, 40, 2805–2815. [Google Scholar] [CrossRef]
- Coath, R.; Crooks, J.; Godbeer, A.; Wilson, M.; Turchetta, R. Advanced pixel architectures for scientific image sensor. In Proceedings of the Topical Workshop on Electronics for Particle Physics, Paris, France, 21–25 September 2009; pp. 57–61. [Google Scholar]
- Fossum, E.R.; Hondongwa, D.B. A review of the pinned photodiode for CCD and CMOS image sensors. IEEE J. Electron. Dev. Soc. 2014, 2, 33–43. [Google Scholar] [CrossRef]
- Neamen, D.A. Semiconductor Physics and Devices: Basic Principles, 3rd ed.; McGraw-Hill: New York, NY, USA, 2003; pp. 268–318. [Google Scholar]
- Pertijs, M.A.P.; Huijsing, J.H. Precision Temperature Sensors in CMOS Technology, 1st ed.; Springer: Dordrecht, The Netherlands, 2006; pp. 11–46. [Google Scholar] [CrossRef]
- Audy, J.M.; Gilbert, B. Multiple Sequential Temperature Sensing Method and Apparatus. U.S. Patent 5,195,827, 4 March 1993. [Google Scholar]
- Xie, S.; Theuwissen, A. Suppression of spatial noise and temporal noise in a CMOS image sensor. IEEE Sens. J. 2020, 20, 162–170. [Google Scholar] [CrossRef]
- Malcovati, P.; Maloberti, F.; Fiocchi, C.; Pruzzi, M. Curvature-compensated BiCMOS bandgap with 1-V supply voltage. IEEE J. Solid-State Circuits 2001, 36, 1076–1081. [Google Scholar] [CrossRef] [Green Version]
- Guan, X.; Wang, X.; Wang, A.; Zhao, B. A 3 V 110 μW 3.1 ppm/°C curvature-compensated CMOS bandgap reference. Analog Integr. Circuit Signal Process. 2010, 62, 113–119. [Google Scholar] [CrossRef] [Green Version]
- Tsividis, Y. Accurate analyzes of temperature effects in IC-VBE characteristics with application to bandgap reference sources. IEEE J. Solid-State Circuits 1980, 15, 1076–1084. [Google Scholar] [CrossRef]
- Xie, S.; Theuwissen, A. Compensation for Process and Temperature Dependency in a CMOS Image Sensor. Sensors 2019, 19, 870. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yasutomi, K.; Sadanaga, Y.; Takasawa, T.; Itoh, S.; Kawahito, S. Dark Current Characterization of CMOS Global Shutter Pixels Using Pinned Storage Diodes. In Proceedings of the International Image Sensor Workshop, Hokaido, Japan, 8–11 June 2011. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Voltage [V] | TC [ppm/°C] | Power Consumption @ 25 °C [μW] |
|---|---|---|
| 2.2 (VBias) | 3.4239 | 56 |
| 1.1 (VBias) | 3.6959 | 54 |
| 0.9 (VBias) | 4.3051 | 52 |
| 1.1 (VREF) | 3.4406 | 54 |
| 0.7 (VREF) | 5.2471 | 54 |
| Item | [17] | [18] | [29] | This Work | This Work |
|---|---|---|---|---|---|
| Year | 2018 | 2020 | 2018 | 2020 | 2020 |
| Process (μm) | 0.18 | 0.18 | 0.18 | 0.18 | 0.18 |
| Type | BJT | nMOS | BJT | BJT | nMOS |
| Area (µm2) | 8712 1 | 121 | 121 | 8591 1 | 8591 1 |
| Power (μW) | 15 | 36 | 36 | 33 | 20 |
| Range (°C) | −40 to 90 | −20 to 80 | −20 to 80 | −40 to 100 | −40 to 100 |
| Accuracy (°C) | ±0.6 | ±0.3 | ±0.5 | ±0.25 | ±0.45 |
| Spatial 3σ (°C) | ±4 | ±1.3 | ±1.1 | ±0.7 | ±0.95 |
| Time 3σ (°C) | - | - | - | ±1 | ±1.4 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abarca, A.; Theuwissen, A. In-Pixel Temperature Sensors with an Accuracy of ±0.25 °C, a 3σ Variation of ±0.7 °C in the Spatial Domain and a 3σ Variation of ±1 °C in the Temporal Domain. Micromachines 2020, 11, 665. https://doi.org/10.3390/mi11070665
Abarca A, Theuwissen A. In-Pixel Temperature Sensors with an Accuracy of ±0.25 °C, a 3σ Variation of ±0.7 °C in the Spatial Domain and a 3σ Variation of ±1 °C in the Temporal Domain. Micromachines. 2020; 11(7):665. https://doi.org/10.3390/mi11070665
Chicago/Turabian StyleAbarca, Accel, and Albert Theuwissen. 2020. "In-Pixel Temperature Sensors with an Accuracy of ±0.25 °C, a 3σ Variation of ±0.7 °C in the Spatial Domain and a 3σ Variation of ±1 °C in the Temporal Domain" Micromachines 11, no. 7: 665. https://doi.org/10.3390/mi11070665