Airborne Laser Scanning for the Site Type Identification of Mature Boreal Forest Stands

Abstract
:1. Introduction
2. Material and Methods
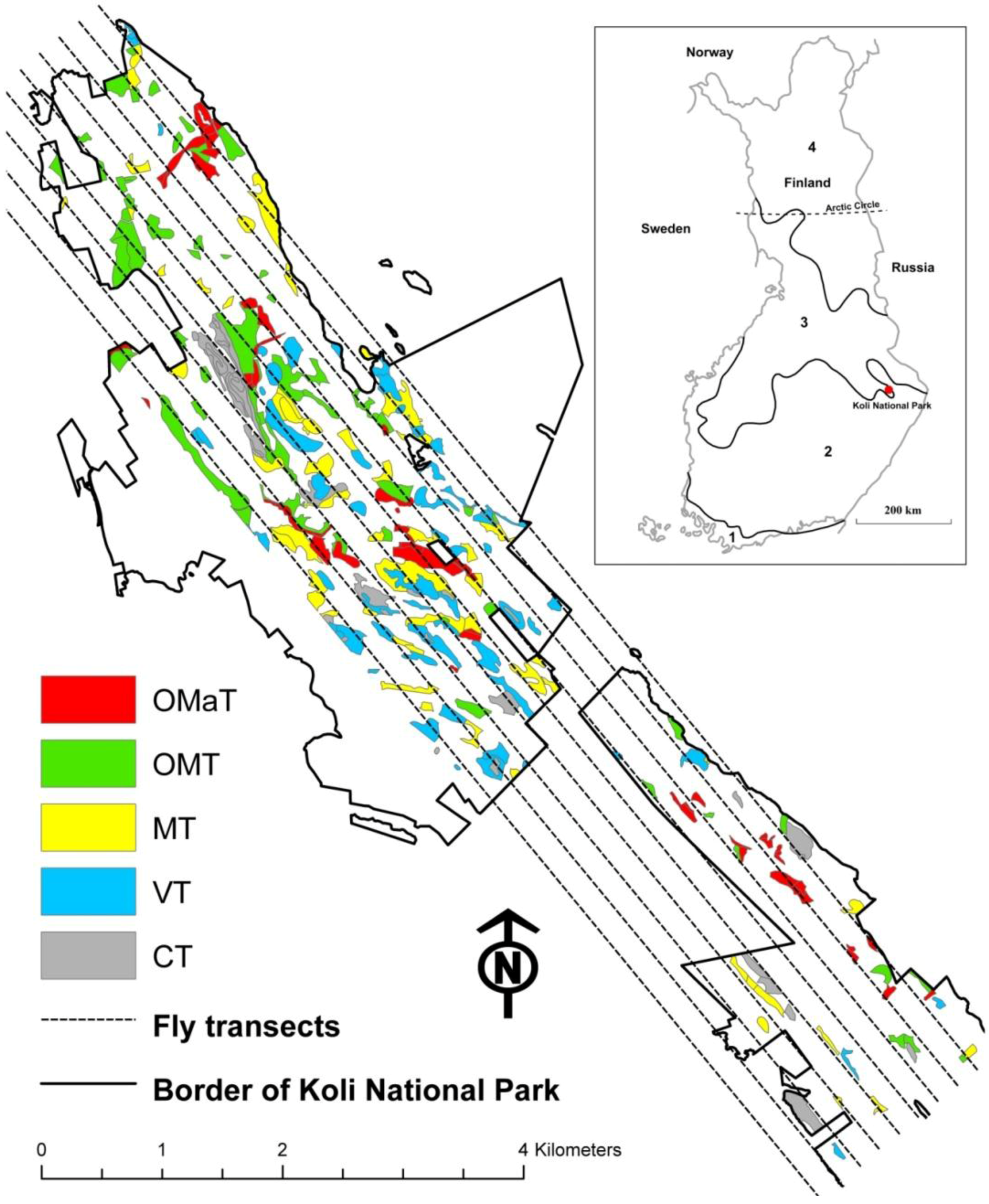
2.1. Study Area and Forest Inventory Data


{kind=link}
{kind=link}
{kind=link}
| Forest site type | Whole data 336.7 ha (n = 274) | ||||
|---|---|---|---|---|---|
| n | Min | Max | Mean | S.D. | |
| Very-rich (1) | 61 | 0.03 | 5.80 | 0.73 | 0.91 |
| Rich (2) | 60 | 0.13 | 12.13 | 1.48 | 2.12 |
| Medium (3) | 60 | 0.16 | 7.77 | 1.38 | 1.37 |
| Rather poor (4) | 60 | 0.12 | 6.46 | 1.29 | 1.14 |
| Poor (5) | 33 | 0.04 | 7.02 | 1.30 | 1.58 |
2.2. Airborne Laser Scanner Data
| Forest site type | all | fo | f/fo, % | o/fo, % | l/fo, % | i/fo, % | all/fo, % |
|---|---|---|---|---|---|---|---|
| Very-rich (1) | 7.3 | 5.0 | 37.3 | 62.7 | 38.0 | 6.2 | 144.2 |
| Rich (2) | 7.0 | 5.0 | 35.7 | 64.3 | 36.3 | 5.6 | 141.9 |
| Medium (3) | 6.8 | 4.8 | 34.9 | 65.1 | 35.7 | 5.1 | 140.8 |
| Rather poor (4) | 6.4 | 4.7 | 32.1 | 67.9 | 32.8 | 4.0 | 136.8 |
| Poor (5) | 6.2 | 5.0 | 22.5 | 77.5 | 22.9 | 1.7 | 124.6 |
- k = 1: the value of the predicted variable is the value of the nearest neighbor
- k > 1: the weights of the neighbors are summed by forest site type class and the estimated forest site type class for the target unit is the one with the highest sum of weights.
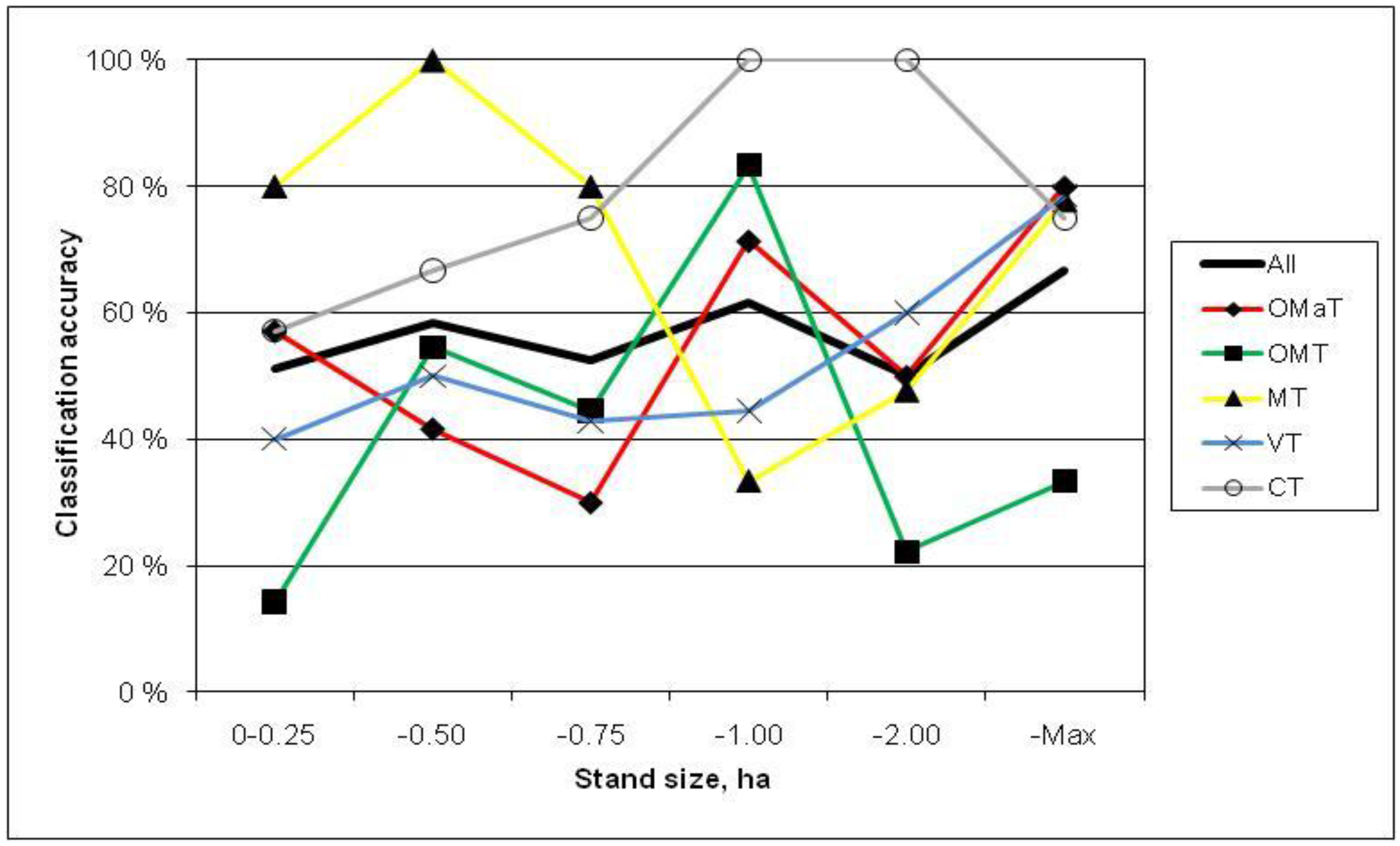
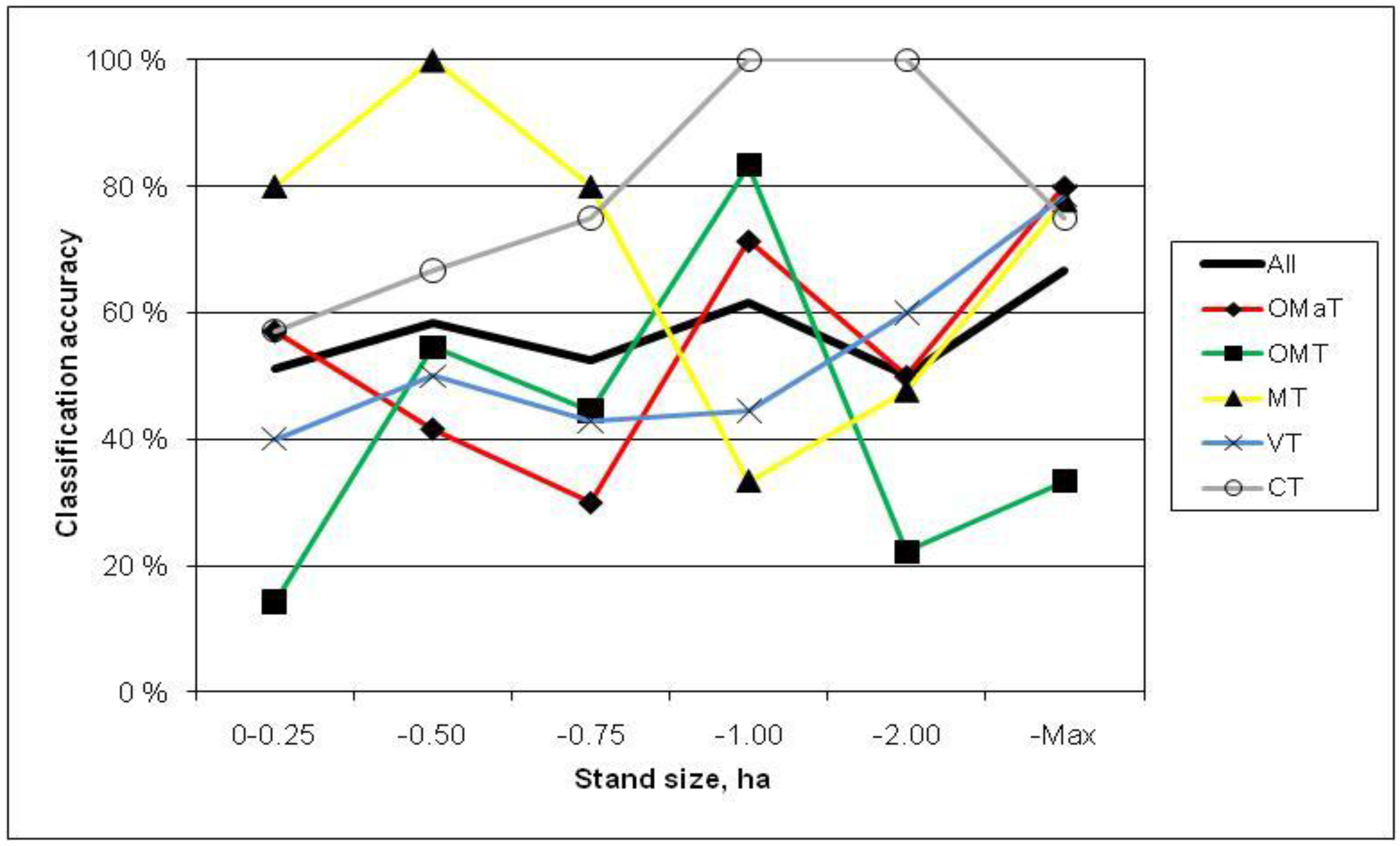
3. Results
| Classification | Height | Intensity values (i) | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| method | sum | f | l | i | fo | lo | sum i | f | l | i | fo | lo |
| 1-NN–(1) | 0.8 | 0.2 | 0.1 | 0.5 | 0.2 | 0.1 | 0.1 | |||||
| 1-NN–(2) | 0.9 | 0.1 | 0.2 | 0.3 | 0.3 | 0.1 | 0.1 | |||||
| 3-NN–(1) | 0.4 | 0.1 | 0.1 | 0.2 | 0.6 | 0.1 | 0.1 | 0.4 | ||||
| 3-NN–(2) | 0.2 | 0.2 | 0.8 | 0.1 | 0.1 | 0.4 | 0.2 | |||||
| 5-NN–(1) | 0.5 | 0.2 | 0.1 | 0.2 | 0.5 | 0.3 | 0.1 | 0.1 | ||||
| 5-NN–(2) | 0.4 | 0.1 | 0.3 | 0.6 | 0.2 | 0.2 | 0.1 | 0.1 | ||||
| 1-NN–(1) 56.6; 89.4 | 3-NN–(1) 56.9; 88.7 | 5-NN–(1) 58.0; 89.8 | |||||||||||||||||
| *1 | 2 | 3 | 4 | 5 | 1 | 2 | 3 | 4 | 5 | 1 | 2 | 3 | 4 | 5 | |||||
| *1 | 52 | 23 | 18 | 2 | 5 | 1 | 59 | 21 | 15 | 2 | 3 | 1 | 62 | 20 | 13 | 0 | 5 | ||
| 2 | 15 | 45 | 32 | 8 | 0 | 2 | 18 | 47 | 27 | 8 | 0 | 2 | 20 | 43 | 28 | 8 | 0 | ||
| 3 | 7 | 15 | 63 | 13 | 2 | 3 | 10 | 18 | 60 | 10 | 2 | 3 | 10 | 20 | 58 | 10 | 2 | ||
| 4 | 2 | 3 | 23 | 57 | 15 | 4 | 0 | 8 | 17 | 65 | 10 | 4 | 0 | 8 | 12 | 68 | 12 | ||
| 5 | 0 | 0 | 3 | 24 | 73 | 5 | 0 | 0 | 6 | 42 | 52 | 5 | 0 | 0 | 0 | 42 | 58 | ||
| 17 | 19 | 30 | 20 | 14 | 19 | 21 | 27 | 24 | 9 | 20 | 20 | 24 | 24 | 11 | |||||
| 1-NN–(2) 55.6; 92.2 | 3-NN–(2) 55.6; 83.3 | 5-NN–(2) 54.4; 90.0 | |||||||||||||||||
| 1 | 2 | 3 | 4 | 5 | 1 | 2 | 3 | 4 | 5 | 1 | 2 | 3 | 4 | 5 | |||||
| 1 | 60 | 20 | 20 | 0 | 0 | 1 | 60 | 10 | 30 | 0 | 0 | 1 | 65 | 25 | 10 | 0 | 0 | ||
| 2 | 10 | 50 | 40 | 0 | 0 | 2 | 25 | 45 | 20 | 5 | 5 | 2 | 20 | 40 | 35 | 5 | 0 | ||
| 3 | 10 | 15 | 60 | 15 | 0 | 3 | 15 | 15 | 65 | 5 | 0 | 3 | 5 | 30 | 55 | 10 | 0 | ||
| 4 | 0 | 5 | 35 | 45 | 15 | 4 | 10 | 10 | 20 | 50 | 10 | 4 | 10 | 15 | 15 | 50 | 10 | ||
| 5 | 0 | 0 | 0 | 30 | 70 | 5 | 0 | 0 | 0 | 40 | 60 | 5 | 0 | 0 | 0 | 30 | 70 | ||
| 18 | 20 | 34 | 17 | 11 | 24 | 18 | 30 | 18 | 10 | 22 | 24 | 26 | 18 | 10 | |||||
| Whole data | Test data | |
|---|---|---|
| 1-NN/3-NN | 0.353 | 0.370 |
| 1-NN/5-NN | 0.448 | 0.484 |
| 3-NN/5-NN | 0.560 | 0.663 |
4. Discussion
5. Conclusions
Acknowledgements
References and Notes
- Cajander, A.K. The Theory of Forests Types. Acta Forestalia Fennica 1926, 29, 1–108. [Google Scholar]
- Clutter, J.L.; Fortson, J.C.; Pienaar, L.V.; Brister, G.H.; Bailey, R.L. Timber Management: A Quantitative Approach; John Wiley & Sons: New York, NY, USA, 1983. [Google Scholar]
- Kuusipalo, J. An ecological study of upland forest site classification in Southern Finland. Acta Forestalia Fennica 1985, 192, 1–77. [Google Scholar]
- Poso, S. Kuvioittaisen arviomismenetelmien perusteita. Basic features of forest inventory by compartments. Silva Fennica 1983, 17, 313–349, (In Finnish, with English summary). [Google Scholar] [CrossRef]
- Hyppänen, H.; Pasanen, K.; Saramäki, J. Päätehakkuiden kuviorajojen päivitystarkkuus. Metsätieteen aikakauskirja 1996, 4, 321–335. (In Finnish) [Google Scholar]
- Uuttera, J.; Hyppänen, H. Determination of potential key-biotope areas in managed forests of Finland using existing inventory data and digital aerial photographs. Forest Landscape Res. 1998, 1, 415–429. [Google Scholar]
- Næsset, E. Practical large-scale forest stand inventory using small-footprint airborne scanning laser. Scand. J. Forest Res. 2004, 19, 164–179. [Google Scholar] [CrossRef]
- Maltamo, M.; Malinen, J.; Packalén, P.; Suvanto, A.; Kangas, J. Nonparametric estimation of stem volume using airborne laser scanning, aerial photography, and stand-register data. Can. J. Forest Res. 2006, 36, 426–436. [Google Scholar] [CrossRef]
- Ritchie, J.C.; Jackson, T.J.; Everitt, J.H.; Escobar, D.E.; Murphey, J.B. Airborne laser: A tool to study landscape surface features. J. Soil Water Conserv. 1992, 47, 104–107. [Google Scholar]
- Lim, K.; Treitz, P.; Wulder, M.; St-Onge, B.; Flood, M. ALS remote sensing of forest structure. Prog. Phys. Geog. 2003, 27, 88–106. [Google Scholar] [CrossRef]
- Næsset, E. Determination of mean tree height of forest stands using airborne laser scanner data. ISPRS J. Photogramm. Remote Sens. 1997, 52, 49–56. [Google Scholar] [CrossRef]
- Magnussen, S.; Boudewyn, P. Derivations of stand heights from airborne laser scanner data with canopy-based quantile estimators. Can. J. Forest Res. 1998, 28, 1016–1031. [Google Scholar] [CrossRef]
- Hyyppä, J.; Kelle, O.; Lehikoinen, M.; Inkinen, M. A segmentation-based method to retrieve stem volume estimates from 3-dimensional tree height models produced by laser scanner. IEEE Trans. Geosci. Remote Sens. 2001, 39, 969–975. [Google Scholar] [CrossRef]
- Hopkinson, C.; Chasmer, L.; Lim, K.; Treitz, P.; Creed, I. Towards a universal Lidar canopy height indicator. Can. J. Remote Sens. 2006, 32, 139–152. [Google Scholar] [CrossRef]
- Riaño, D.; Meier, E.; Allgöwer, B.; Chuvieco, E.; Ustin, S.L. Modeling airborne laser scanning data for the spatial generation of critical forest parameters in fire behaviour modelling. Remote Sens. Environ. 2003, 86, 177–186. [Google Scholar] [CrossRef]
- Andersen, H-E.; McGaughey, R.J.; Reutebuch, S.E. Estimating forest canopy fuel parameters using LIDAR data. Remote Sens. Environ. 2005, 94, 441–449. [Google Scholar]
- Maltamo, M.; Packalén, P.; Yu, X.; Eerikäinen, K.; Hyyppä, J.; Pitkänen, J. Identifying and quantifying structural characteristics of heterogenous boreal forests using laser scanner data. Forest Ecol. Manage. 2005, 216, 41–50. [Google Scholar] [CrossRef]
- Goodwin, N.R.; Coops, N.C.; Bater, C.; Gergel, S.E. Assessment of Sub-Canopy Structure in a Complex Coniferous Forest. In Proceedings of ISPRS Workshop on Laser Scanning 2007 and SilviLaser 2007, Espoo, Finland, September 12–14, 2007; In The International Archives of the Photogrammetry and Remote Sensing and Spatial Information Sciences. ISPRS: Vienna, Austria, 2007; Vol. XXXVI, Part 3/W52. pp. 169–172. [Google Scholar]
- Hill, R.A. Going Undercover: Mapping Woodland Understorey from Leaf-On and Leaf-Off Lidar Data. In Proceedings of ISPRS Workshop on Laser Scanning 2007 and SilviLaser 2007, Espoo, Finland, September 12–14, 2007; In The International Archives of the Photogrammetry and Remote Sensing and Spatial Information Sciences. ISPRS: Vienna, Austria, 2007; Vol. XXXVI, Part 3/W52. pp. 184–189. [Google Scholar]
- Bollandsås, O.M.; Hanssen, K.H.; Martiniussen, S.; Næsset, E. Measures of spatial forest structure derived from airborne laser data are associated with natural regeneration patterns in an uneven-aged spruce forest. Forest Ecol. Manage. 2008, 255, 953–961. [Google Scholar] [CrossRef]
- Bater, C.W.; Coops, N.C.; Gergel, S.E.; Goodwin, N.R. Towards the Estimation of Tree Structural Class in Northwest Coastal Forests Using Lidar Remote Sensing. In Proceedings of ISPRS Workshop on Laser Scanning 2007 and SilviLaser 2007, Espoo, Finland, September 12–14, 2007; In The International Archives of the Photogrammetry and Remote Sensing and Spatial Information Sciences. ISPRS: Vienna, Austria, 2007; Vol. XXXVI, Part 3/W52. pp. 38–43. [Google Scholar]
- Pesonen, A.; Maltamo, M.; Eerikäinen, K.; Packalén, P. Airborne laser scanning-based prediction of coarse woody debris volumes in a conservation area. Forest Ecol. Manage. 2008, 255, 3288–3296. [Google Scholar] [CrossRef]
- Brennan, R.; Webster, T.L. Object-oriented land cover classification of lidar-derived surfaces. Can. J. Remote Sens. 2006, 32, 162–172. [Google Scholar] [CrossRef]
- Hopkinson, C.; Chasmer, L. Modelling Canopy Gap Fraction from Lidar Intensity. In Proceedings of ISPRS Workshop on Laser Scanning 2007 and SilviLaser 2007, Espoo, Finland, September 12–14, 2007; In The International Archives of the Photogrammetry and Remote Sensing and Spatial Information Sciences. ISPRS: Vienna, Austria, 2007; Vol. XXXVI, Part 3/W52. pp. 190–194. [Google Scholar]
- Ørka, H.O.; Næsset, E.; Bollandsås, O.M. Utilizing Airborne Laser Intensity for Tree Species Classification. In Proceedings of ISPRS Workshop on Laser Scanning 2007 and SilviLaser 2007, Espoo, Finland, September 12–14, 2007; In The International Archives of the Photogrammetry and Remote Sensing and Spatial Information Sciences. ISPRS: Vienna, Austria, 2007; Vol. XXXVI, Part 3/W52. pp. 300–304. [Google Scholar]
- Ahokas, E.; Kaasalainen, S.; Hyyppä, J.; Suomalainen, J. Calibration of the Optech ALTM 3100 Laser Scanner Intensity Data Using Brightness Targets. In Proceedings of ISPRS Commission I Symposium, Paris, France, May 2–6, 2006; In The International Archives of the Photogrammetry and Remote Sensing and Spatial Information Sciences. ISPRS: Vienna, Austria, 2006; Vol. XXXVI. Part A1, T03-11. [Google Scholar]
- Rombouts, J.H. Exploring the Potential of Airborne LiDAR for Site Quality Assessment of Radiate Pine Plantations in South Australia: Initial Results. In Proceedings of Forest Measurement and Information Systems, Biennial Meeting 2006, Research Working Group 2, Woodend, Australia, November 21–24 2006.
- Gatziolis, D. Lidar-Derived Site Index in the US Pacific Northwest—Challenges and Opportunities. In Proceedings of ISPRS Workshop on Laser Scanning 2007 and SilviLaser 2007, Espoo, Finland, September 12–14, 2007; In The International Archives of the Photogrammetry and Remote Sensing and Spatial Information Sciences. ISPRS: Vienna, Austria, 2007; Vol. XXXVI, Part 3/W52. pp. 136–143. [Google Scholar]
- Eerikäinen, K. A site dependent simultaneous growth projection model for Pinus kesiya plantations in Zambia and Zimbabwe. Forest Sci. 2002, 48, 518–529. [Google Scholar]
- Pitkänen, S. Correlation between stand strucure and ground vegetation: An analytical approach. Plant Ecol. 1997, 131, 109–126. [Google Scholar] [CrossRef]
- Korpela, I.; Koskinen, M.; Holopainen, M.; Vasander, H.; Minkkinen, K. Airborne small-footprint discrete-return LiDAR data in the assessment of boreal mire surface patterns, vegetation and habitats. Forest Ecol. Manage. 2009, 258, 1549–1566. [Google Scholar] [CrossRef]
- Vehmas, M.; Eerikäinen, K.; Peuhkurinen, J.; Packalén, P.; Maltamo, M. Identification of boreal forest stands with high herbaceous plant diversity using airborne laser scanning. Forest Ecol. Manage. 2009, 257, 46–53. [Google Scholar] [CrossRef]
- Moeur, M.; Stage, A.R. Most similar neighbor: An improved sampling inference procedure for natural resource planning. Forest Sci. 1995, 41, 337–359. [Google Scholar]
- Holmström, H.; Nilsson, M.; Ståhl, G. Simultaneous estimations of forest parameters using aerial photograph interpreted data and the k nearest neighbour method. Scand. J. Forest Res. 2001, 16, 67–78. [Google Scholar] [CrossRef]
- Thessler, S.; Sesnie, S.; Ramos Bendaña, Z.; Ruokolainen, K.; Tomppo, E.; Finegan, B. Using k-NN and discriminant analyses to classify rain forest types in a Landsat TM image over northern Costa Rica. Remote Sens. Environ. 2008, 112, 2485–2494. [Google Scholar] [CrossRef]
- Peuhkurinen, J.; Maltamo, M.; Malinen, J. Estimating species-specific distributions and saw log recoveries of boreal forests from airborne laser scanning data and aerial photographs: A distribution-based approach. Silva Fennica 2008, 42, 625–641. [Google Scholar] [CrossRef]
- Kalliola, R. Suomen kasvimaantiede. Werner Söderström Osakeyhtiö: Porvoo, Finland, 1973. (In Finnish) [Google Scholar]
- Lyytikäinen, A. Kolin luonto, maisema ja kulttuurihistoria. Kolin luonnonsuojelututkimukset: Vesi- ja ympäristöhallituksen monistesarja, 1991; 308. (In Finnish) [Google Scholar]
- Grönlund, A.; Hakalisto, S. Management of Traditional Rural Landscapes in Koli National Park. Separate Plan of Koli National Park; Regional Environmental Publications 104; North Karelia Regional Environment Centre: Joensuu, Finland, 1998; pp. 1–81, (In Finnish, with English summary). [Google Scholar]
- Hokkanen, P. Vegetation Patterns of Boreal Herb-Rich Forests in the Koli Region, Eastern Finland: Classification, Environmental Factors and Conservation Aspects. Ph.D. Dissertation, Faculty of Forestry, University of Joensuu, Joensuu, Finland, 2006. [Google Scholar]
- Davis, L.S.; Johnson, K.N. Forest Management, 3rd ed.; McGraw-Hill: New York, NY, USA, 1987. [Google Scholar]
- Axelsson, P. DEM Generation from Laser Scanner Data Using TIN Models. In Proceedings of XIXth ISPRS Congress: Technical Commission IV, Amsterdam, The Netherlands, July 16–23, 2000; In The International Archives of the Photogrammetry and Remote Sensing and Spatial Information Sciences. ISPRS: Vienna, Austria, 2000; Vol. XXXIII, Part B4/1. pp. 110–117. [Google Scholar]
- Hyyppä, H.; Yu, X.; Hyyppä, J.; Kaartinen, H.; Kaasalainen, S.; Honkavaara, E.; Rönnholm., P. Factors Affecting the Quality of DTM Generation in Forested Areas. In Proceedings of the ISPRS Workshop Laser scanning 2005, Enschede, The Netherlands, September 12–14, 2005; In International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences. ISPRS: Vienna, Austria, 2005; Vol. XXXVI, Part 3/W19. pp. 85–90. [Google Scholar]
- LeMay, V.; Temesgen, H. Comparison of nearest neighbor methods for estimating basal area and stems per hectare using aerial auxiliary variables. Forest Sci. 2005, 51, 109–119. [Google Scholar]
- Cohen, J. A coefficient of agreement for nominal scales. Educ. Psychol. Meas. 1960, 20, 37–46. [Google Scholar] [CrossRef]
- Hynynen, J.; Ojansuu, R.; Hökkä, H.; Siipilehto, J.; Salminen, H.; Haapala, P. Models for Predicting Stand Development in MELA System; Research Papers 835; Finnish Forest Research Institute: Vantaa, Finland, 2002; p. 116. [Google Scholar]
© 2011 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Vehmas, M.; Eerikäinen, K.; Peuhkurinen, J.; Packalén, P.; Maltamo, M. Airborne Laser Scanning for the Site Type Identification of Mature Boreal Forest Stands. Remote Sens. 2011, 3, 100-116. https://doi.org/10.3390/rs3010100
Vehmas M, Eerikäinen K, Peuhkurinen J, Packalén P, Maltamo M. Airborne Laser Scanning for the Site Type Identification of Mature Boreal Forest Stands. Remote Sensing. 2011; 3(1):100-116. https://doi.org/10.3390/rs3010100
Chicago/Turabian StyleVehmas, Mikko, Kalle Eerikäinen, Jussi Peuhkurinen, Petteri Packalén, and Matti Maltamo. 2011. "Airborne Laser Scanning for the Site Type Identification of Mature Boreal Forest Stands" Remote Sensing 3, no. 1: 100-116. https://doi.org/10.3390/rs3010100