A Review of Protocols for Fiducial Reference Measurements of Water-Leaving Radiance for Validation of Satellite Remote-Sensing Data over Water

 , ,
, ,  , , , , ,
, , , , ,
Abstract
:
1. Introduction
1.1. The Need for Fiducial Reference Measurements for Satellite Validation
- An uncertainty budget for all FRM instruments and derived measurements is available and maintained, traceable where appropriate to the International System of Units/Système International d’unités (SI), ideally through a national metrology institute.
- FRM measurement protocols and community-wide management practices (measurement, processing, archive, documents, etc.) are defined and adhered to
- FRM measurements have documented evidence of SI traceability and are validated by intercomparison of instruments under operational-like conditions.
- FRM measurements are independent from the satellite retrieval process.
1.2. Scope and Definitions
1.3. Previous Protocol Reviews
- greater need for validation measurements in coastal and inland waters rather than the prior focus on oceanic waters;
- reduction in cost and size of radiometers, e.g., facilitating multi-sensor above-water radiometry and reducing self-shading problems for underwater radiometry; and
- increased availability of hyperspectral radiometers.
1.4. Overview of Methods and Overview of This Paper
- Underwater radiometry using fixed-depth measurements (“underwater fixed depths”)
- Underwater radiometry using vertical profiles (“underwater profiling”)
- Above-water radiometry with sky radiance measurement and skyglint removal (“above-water”)
- On-water radiometry with skylight blocked (“skylight-blocked”)
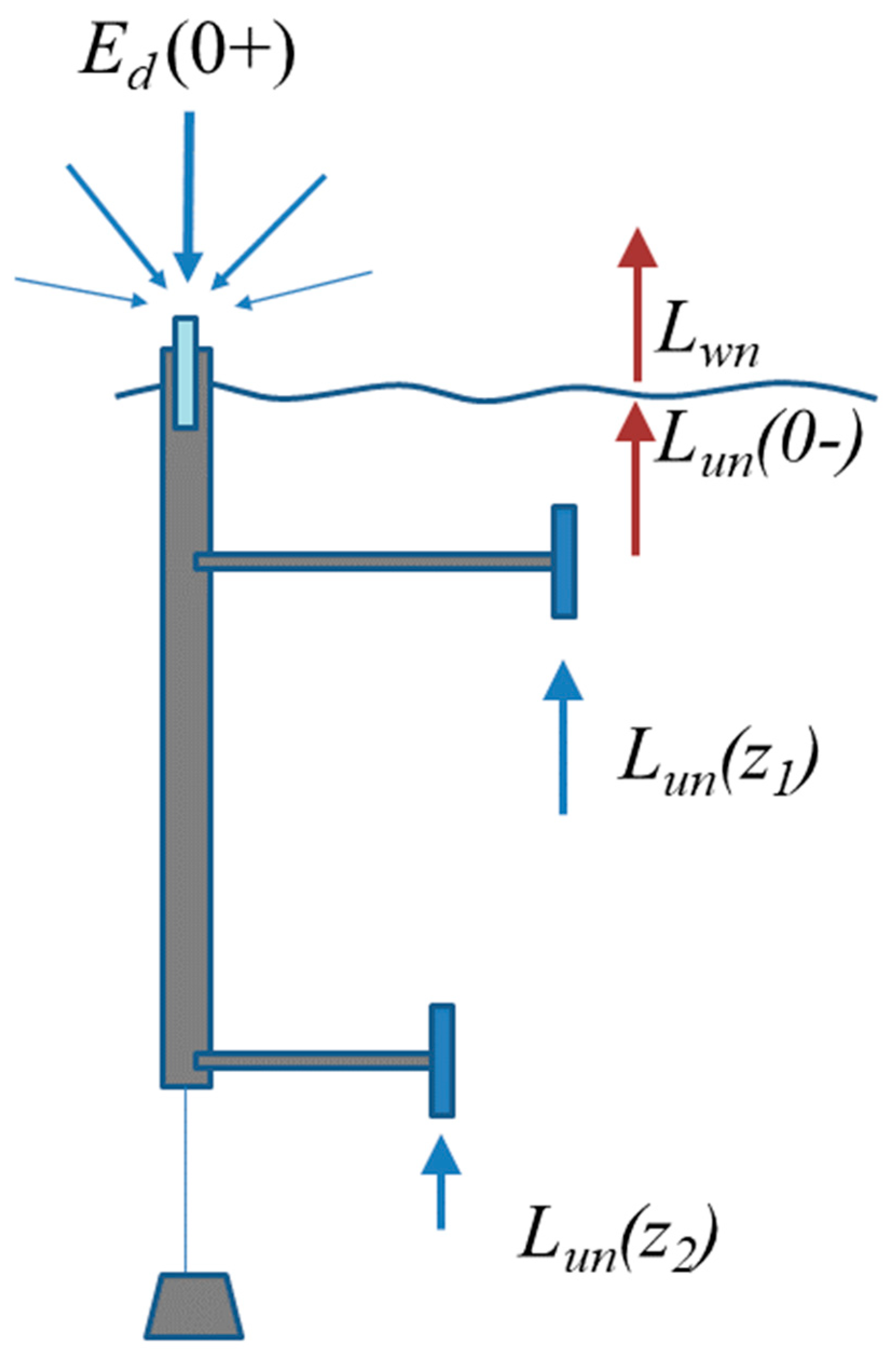
2. Underwater Radiometry—Fixed-Depth Measurements
2.1. Measurement Equation
2.2. Protocol-Dependent Sources of Uncertainty
2.2.1. Non-Exponential Variation of Upwelling Radiance with Depth
2.2.2. Tilt Effects
2.2.3. Self-Shading and/or Reflection from Radiometer and/or Superstructure
2.2.4. Bio-Fouling
2.2.5. Depth Measurement
2.2.6. Fresnel Transmittance
2.2.7. Temporal Fluctuations
2.3. Variants on the Fixed-Depth Underwater Radiometric Method
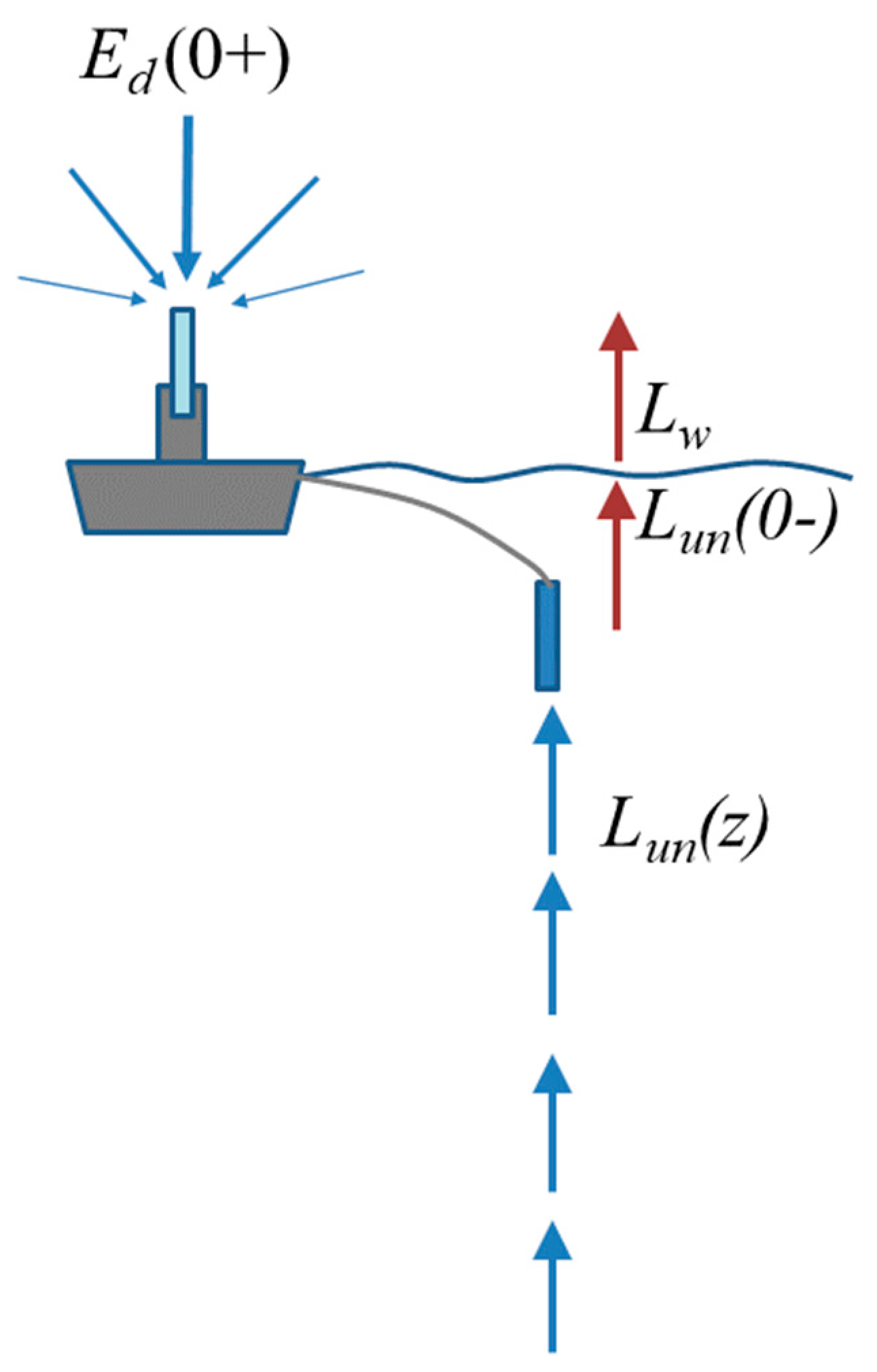
3. Underwater Radiometry—Vertical Profiles
3.1. Measurement Equation
- Measurements should be made as close as possible to the air–water interface to minimise the uncertainties associated with extrapolation from depth, particularly if there are vertical gradients of inherent optical properties or for wavelengths/waters with high vertical attenuation. Very near-surface measurements are complicated by waves, which affect radiometer tilt and vertical positioning as well as the radiance field itself (focusing/defocusing). To deal with this, new profiling platforms have been designed for very slow and stable sampling close to the surface [54].
- Sufficient measurements are needed for each depth (interval) to ensure that wave focusing and defocusing effects can be removed, implying that profiling speed should be sufficiently slow, adding to the time required to make a cast, a practical consideration, and the possibility of temporal variation of illumination conditions, a data quality consideration.
- The vertical profiling speed should be matched to the acquisition rate of the radiometers to ensure that the depth of each measurement can be determined with sufficient accuracy.
- The depth range chosen for data processing is “the key element in extracting accurate subsurface data from in-water profiles” [68]. should be chosen sufficiently large to avoid problems of near-surface tilt, wave focusing/defocusing and bubbles, but sufficiently small to limit uncertainties associated with extrapolation to the surface, particularly for high attenuation waters/wavelengths. Any depth interval with significant ship/superstructure shadowing must also be avoided. In practice, the choice of depth range is generally made subjectively [11] because of the difficulty to automate such thinking.
- The depth range used in data processing can be wavelength-dependent (unlike for the fixed-depth method of Section 2), e.g., using optical depth to set differently at each wavelength.
- For measurements with significant temporal variability of , some time filtering of may be needed before application of Equation (10). For example, may be chosen as the median of over the measurement interval or, for ship-induced periodic variability, may be first linearly fitted as function of .
3.2. Protocol-Dependent Sources of Uncertainty
3.2.1. Non-Exponential Variation of Upwelling Radiance with Depth
3.2.2. Tilt Effects
3.2.3. Self-Shading from Radiometers and/or Superstructure
3.2.4. Bio-Fouling
3.2.5. Depth Measurement
3.2.6. Fresnel Transmittance
3.2.7. Temporal Fluctuations
3.3. Variants on the Vertical Profiling Underwater Radiometric Method
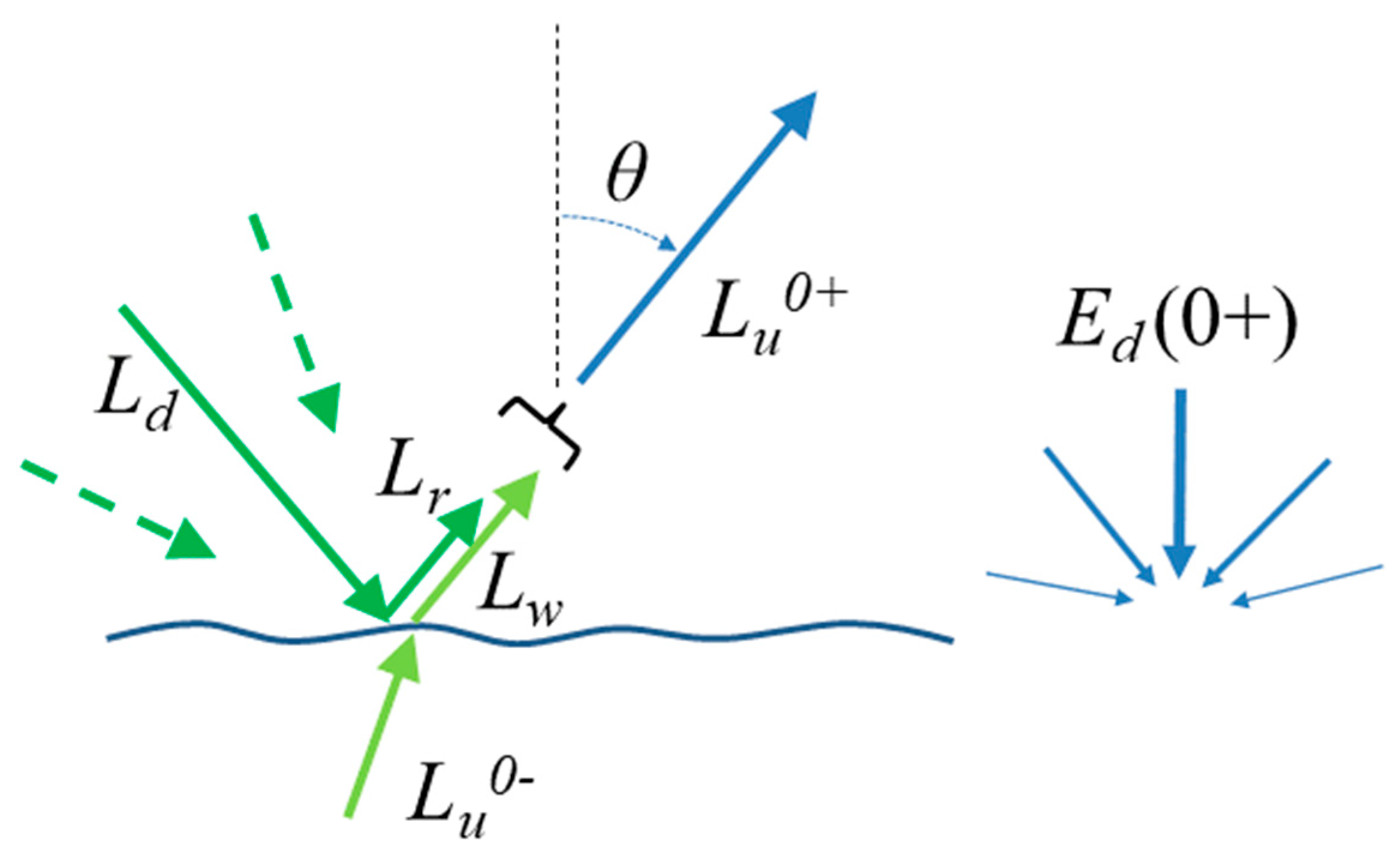
4. Above-Water Radiometry with Sky Radiance Measurement and Skyglint Removal
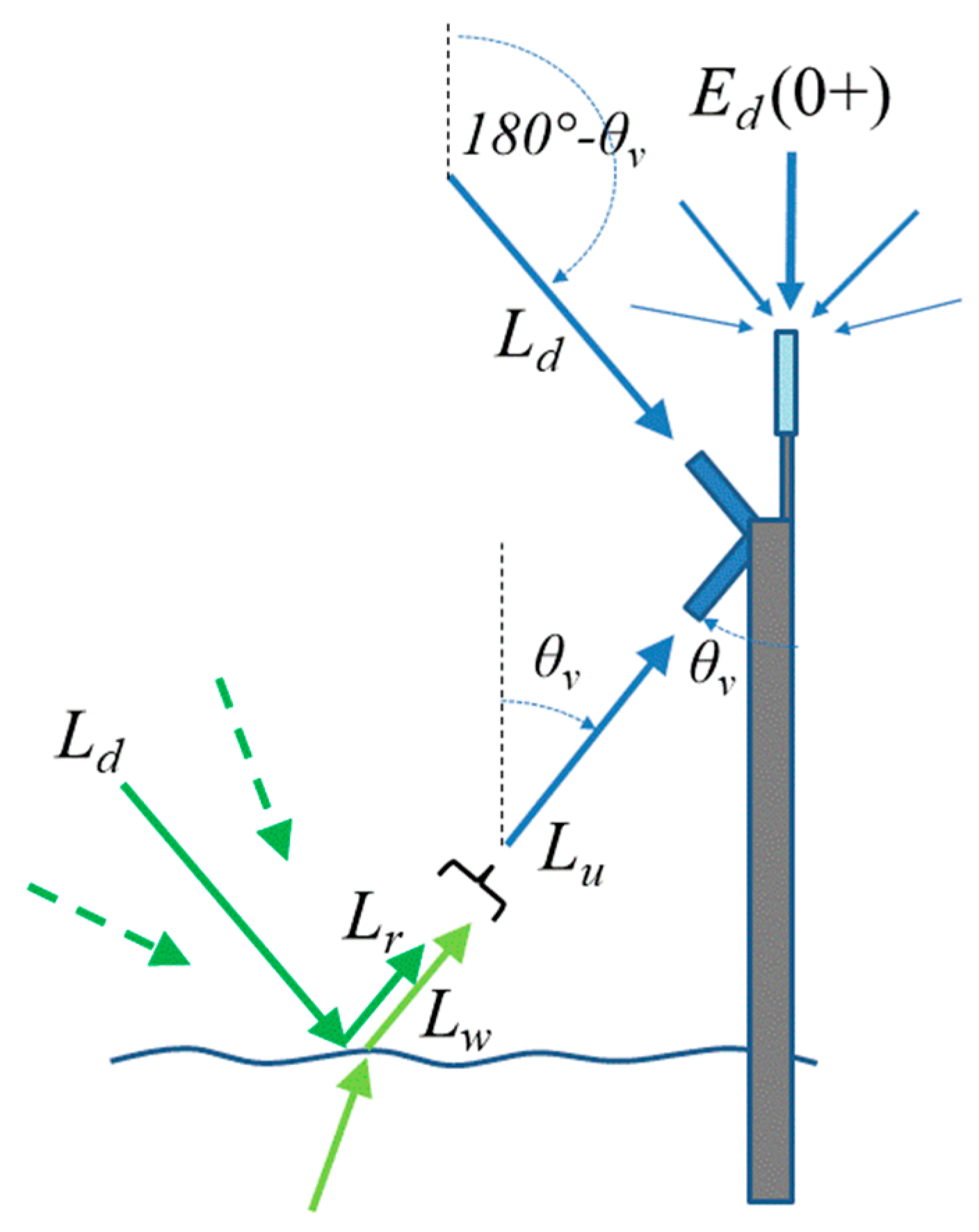
4.1. Measurement Equation
- The water surface is not flat but is a wavy surface [32] implying that (a) the portion of sky reflected into the water-viewing direction may come from directions other than [75], and that (b) the incidence angle required for calculation of the Fresnel coefficient is different from , with spatial variation of the incidence angle within the sensor field of view that increases with wave inclination.
- The downwelling light is not unpolarised, but, particularly for the molecularly scattered “Rayleigh” component at 90° scattering angle from the sun, may be strongly polarised [78].
- Some radiometers have a field of view that can be quite significant, e.g., >10°, meaning that the measurements and are weighted averages over a range of viewing angles and the model for may need to account for different incidence angles even for a flat water surface.
- Viewing nadir angle, e.g., (pointing towards nadir) or or “other”.
- Viewing relative azimuth angle to sun for off-nadir measurements, e.g., or or “other”.
- The method used to estimate skylight reflected at the air–water interface.
Temporal Processing of Radiance Measurements
4.2. Protocol-Dependent Sources of Uncertainty
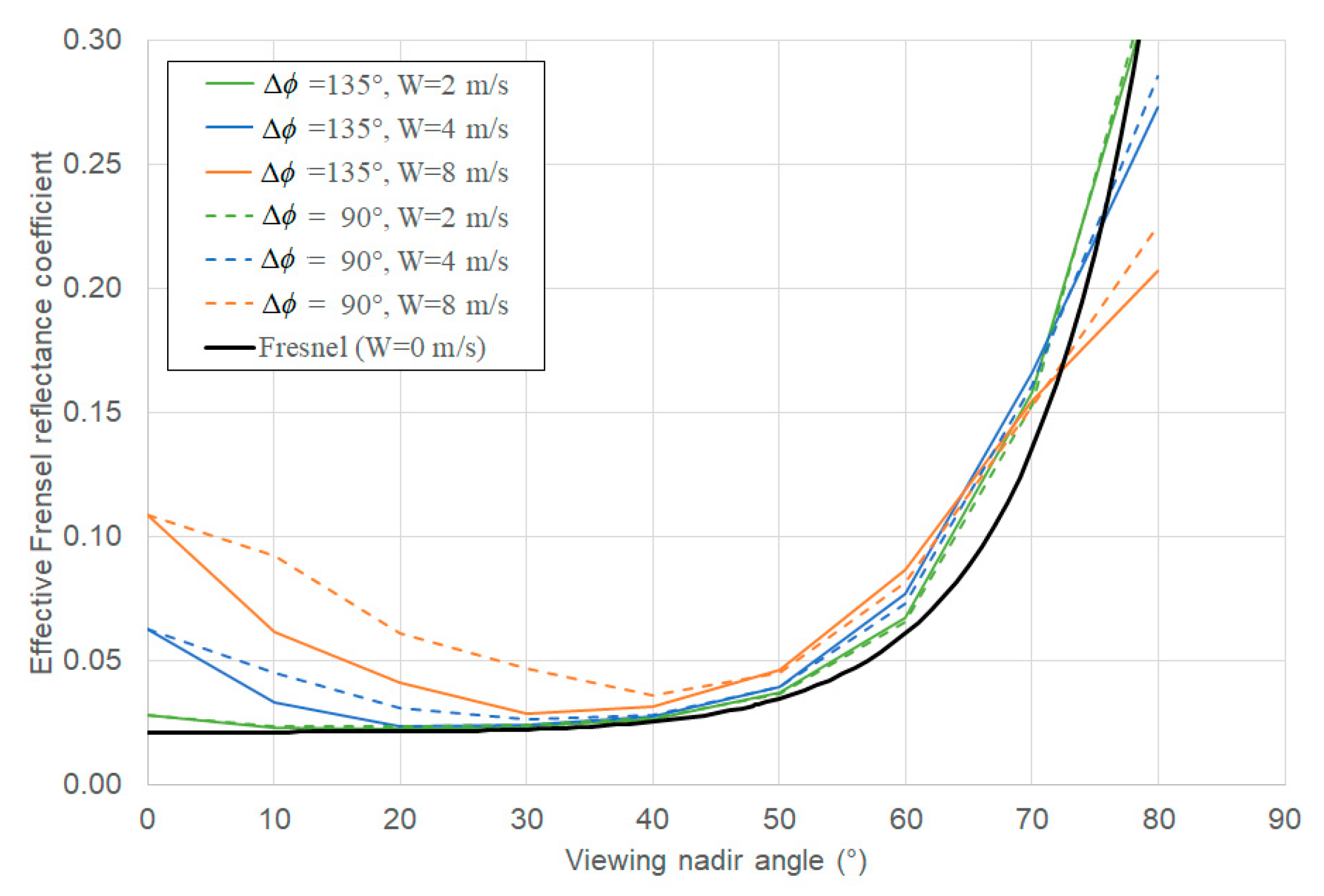
4.2.1. Estimation of Reflected Skylight
4.2.2. Tilt and Heading Effects
4.2.3. Self-Shading from Radiometers and/or Superstructure
- Viewing at a moderate nadir angle, because low nadir angle viewing generally implies that the ship/platform will be closer to the water target and will occupy a larger solid angle of the sky as seen from the water surface (but too large nadir angle will increase uncertainties associated with effective Fresnel reflectance calculation); and
- Considering the viewing azimuth angle as a compromise between avoiding sunglint (need high —see Section 4.2.1) and avoiding direct shadow (need not too high ).
4.2.4. Bio-Fouling and Other Fore-Optics Contamination
4.2.5. Temporal Fluctuations
4.2.6. Bidirectional Effects
4.2.7. Atmospheric Scattering between Water and Sensor
4.3. Variants on the Above-Water Radiometric Method
5. Skylight-Blocked Approach
5.1. Measurement Equation
5.2. Protocol-Dependent Sources of Uncertainty
5.2.1. Self-Shading from Radiometers and/or Superstructure
- Diameter of the cone/shield (preferably small);
- Angular variation of downwelling radiance (preferably high sun zenith angle);
- Inherent optical properties of the water (preferably low absorption);
- Distance of the cone beneath the air–water interface (preferably very small compared to a vertical attenuation length scale).
5.2.2. Tilt Effects
5.2.3. Bio-Fouling and Other Fore-Optics Contamination
5.2.4. Temporal Fluctuations
5.3. Variants on the Skylight-Blocked Approach
6. Conclusions
6.1. Summary of the State of the Art
- Underwater radiometry using fixed-depth measurements (“underwater fixed depths”);
- Underwater radiometry using vertical profiles (“underwater profiling”);
- Above-water radiometry with sky radiance measurement and skyglint removal (“above-water”); and
- On-water radiometry with optical blocking of skylight (“skylight-blocked”).
6.2. Underwater or Above-Water Measurement?
- purchasing radiometers and associated equipment;
- purchasing, renting or arranging access to a deployment platform such as a fixed structure (offshore platform, jetty, pier, buoy, etc.), a ship (research vessel, small boat, passenger ferry “ship of opportunity”, etc.), a drifting underwater platform, or even a low-altitude airborne vehicle (tethered balloon, drone, etc.); and
- training and financially supporting staff to make the measurements (if supervised) or to setup and maintain and monitor the measurement system (if unsupervised), including radiometer checks, calibration and characterisation and data processing, quality control, archiving and distribution.
- Uncertainties associated with vertical extrapolation in underwater methods will be highest for situations (water types, wavelengths) where the diffuse attenuation coefficient length scale, , is small compared to the depth of the highest usable upwelling radiance measurement, . Thus, the requirement for underwater measurements close to the surface becomes more and more demanding for waters/wavelengths with high , including blue wavelengths in waters with high coloured dissolved organic matter (CDOM) or high non-algae particle (NAP) absorption and red and, a fortiori, near infra-red wavelengths in all waters. Self-shading also increases for high attenuation waters.
- Uncertainties associated with skyglint correction in above-water methods will be highest for low reflectance waters/wavelengths and for high sun zenith angle (as well as for cloudy and partially cloudy skies although these are supposed to be removed by quality control in the FRM context) and for blue wavelengths. Thus, the requirement for a highly accurate skyglint correction method becomes more and more demanding for blue wavelengths in waters with high CDOM absorption (and to a lesser extent high non-algae particle absorption) and for red and near infrared wavelength in low particulate backscatter waters.
6.3. Future Perspectives
- Improvements in the design and usage of calibration monitoring devices, which can be used in the field, are likely to improve identification of fore-optics fouling and radiometer sensitivity changes.
- Model simulations (with polarisation) of the 3D light field and dedicated experiments for all four protocols are likely to improve estimation of related uncertainties.
- Improvements in the stability and reduction in the cost of telescopic masts may reduce superstructure shading effects for above-water radiometry.
- Reduction in the cost of pointing systems, thanks to the video camera surveillance industry, should facilitate multi-directional above-water radiometry [110] and improve the protection (“parking”) of radiometers when not in use and thus reduce fouling for long-term deployments.
- Greater use of full sky imaging cameras [111], whether calibrated (expensive) or not (typically inexpensive), potentially coupled with automated image analysis techniques, will allow better identification of suboptimal measurement conditions.
- The tendency to move to highly automated systems with long-term, e.g., one year, essentially maintenance-free deployments is likely to improve significantly the quantity of data available for validation. Networks of such systems further increase the power and efficiency for validation purposes. Networks of automated systems are now already operational or in advanced prototype testing phases for systems based on the above-water, underwater profiling and underwater fixed-depth methods and are conceptually feasible for the skylight-blocked approach.
- The advent of operational satellite missions such as VIIRS and Sentinel-3/OLCI, Sentinel-2/MSI and Landsat-8/OLI with the need for a guaranteed long-term validated data stream will increase the need for FRM.
- The huge increase in optical satellite missions used for aquatic remote-sensing will also increase the need for highly automated measurement systems and the economy of scale for such deployments—one in situ radiometer system can validate many, many satellite instruments.
- Update this review, e.g., on a 10-year time frame, to take account of developments in the protocols, particularly in the estimation of uncertainties and for the above-water family of methods, where evolution and innovations in basic methodology are continuing. Such an update is best preceded by community discussion at an international workshop.
- Organise regular intercomparison exercises, e.g., on a two-year time frame, covering the full diversity of methods, to ensure that measurement protocols and scientists, remain state of the art (as required by the FRM context).
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Disclaimer
References
- International Ocean Colour Coordinating Group (IOCCG). Why Ocean Colour? The Societal Benefits of Ocean-Colour Technology; Technical Report No. 7; IOCCG: Dartmouth, NS, Canada, 2008; p. 141. [Google Scholar]
- Donlon, C.J.; Wimmer, W.; Robinson, I.; Fisher, G.; Ferlet, M.; Nightingale, T.; Bras, B. A second-generation blackbody system for the calibration and verification of seagoing infrared radiometers. J. Atmos. Ocean. Technol. 2014, 31, 1104–1127. [Google Scholar] [CrossRef]
- Mobley, C.D. Light and Water: Radiative Transfer in Natural Waters; Academic Press: London, UK, 1994. [Google Scholar]
- Mobley, C. Overview of Optical Oceanography—Reflectances. Available online: http://www.oceanopticsbook.info/view/overview_of_optical_oceanography/reflectances (accessed on 24 July 2019).
- Ruddick, K.G.; Voss, K.; Banks, A.C.; Boss, E.; Castagna, A.; Frouin, R.; Hieronymi, M.; Jamet, C.; Johnson, B.C.; Kuusk, J.; et al. A review of protocols for fiducial reference measurements of downwelling irradiance for validation of satellite remote sensing data over water. Remote Sens. 2019, 11, 1742. [Google Scholar] [CrossRef]
- Gitelson, A. The peak near 700 nm on radiance spectra of algae and water: Relationships of its magnitude and position with chlorophyll concentration. Int. J. Remote Sens. 1992, 13, 3367–3373. [Google Scholar] [CrossRef]
- Randolph, K.; Wilson, J.; Tedesco, L.; Li, L.; Pascual, D.L.; Soyeux, E. Hyperspectral remote sensing of cyanobacteria in turbid productive water using optically active pigments, chlorophyll a and phycocyanin. Remote Sens. Environ. 2008, 112, 4009–4019. [Google Scholar] [CrossRef]
- International Standards Organisation (ISO). Space Environment (Natural and Artificial)—Process for Determining solar Irradiances; Technical Report No. 21348:2007; International Standards Organisation (ISO): Geneva, Switzerland, 2007. [Google Scholar]
- Knaeps, E.; Dogliotti, A.I.; Raymaekers, D.; Ruddick, K.; Sterckx, S. In situ evidence of non-zero reflectance in the OLCI 1020 nm band for a turbid estuary. Remote Sens. Environ. 2012, 120, 133–144. [Google Scholar] [CrossRef]
- Dogliotti, A.; Gossn, J.; Vanhellemont, Q.; Ruddick, K. Detecting and quantifying a massive invasion of floating aquatic plants in the Río de la Plata turbid waters using high spatial resolution ocean color imagery. Remote Sens. 2018, 10, 1140. [Google Scholar] [CrossRef]
- Hooker, S.B.; Zibordi, G.; Maritorena, S. The Second SeaWiFs Ocean Optics DARR (DARR-00); SeaWiFS Postlaunch; Technical Report No. 5; NASA Technical Memorandum 2001-206892: Greenbelt, MD, USA, 2001; pp. 4–45. [Google Scholar]
- Zibordi, G.; Ruddick, K.; Ansko, I.; Moore, G.; Kratzer, S.; Icely, J.; Reinart, A. In situ determination of the remote sensing reflectance: An inter-comparison. Ocean Sci. 2012, 8, 567–586. [Google Scholar] [CrossRef]
- Ondrusek, M.; Lance, V.P.; Arnone, R.; Ladner, S.; Goode, W.; Vandermeulen, R.; Freeman, S.; Chaves, J.E.; Mannino, A.; Gilerson, A.; et al. Report for Dedicated JPSS VIIRS Ocean Color December 2015 Calibration/Validation Cruise; U.S. Department of Commerce, National Oceanic and Atmospheric Administration, National Environmental Satellite, Data, and Information Service: Washington, DC, USA, 2016; p. 66.
- Mobley, C.D.; Sundman, L.K.; Boss, E. Phase function effects on oceanic light fields. Appl. Opt. 2002, 41, 1035–1050. [Google Scholar] [CrossRef] [Green Version]
- Tzortziou, M.; Herman, J.R.; Gallegos, C.L.; Neale, P.J.; Subramaniam, A.; Harding, L.W.; Ahmad, Z. Bio-optics of the Chesapeake Bay from measurements and radiative transfer closure. Estuar. Coast. Shelf Sci. 2006, 68, 348–362. [Google Scholar] [CrossRef]
- International Standards Organisation (ISO). Evaluation of Measurement Data—Guide to the Expression of Uncertainty in Measurement; Technical Report No. JCGM 100:2008; International Standards Organisation (ISO): Geneva, Switzerland, 2008. [Google Scholar]
- Mueller, J.L.; Fargion, G.S.; McClain, C.R. Ocean Optics Protocols for Satellite Ocean Color Sensor Validation; Technical Report No. TM 2003 21621/Revision 5; NASA: Greenbelt, MD, USA, 2004. [Google Scholar]
- Zibordi, G.; Voss, K.J. In situ optical radiometry in the visible and near infrared. In Optical Radiometry for Ocean Climate Measurements; Zibordi, G., Donlon, C., Parr, A.C., Eds.; Academic Press: Oxford, UK, 2014; pp. 248–305. [Google Scholar]
- Zibordi, G.; Voss, K. Protocols for Satellite Ocean Color Data Validation: In situ Optical Radiometry; IOCCG Protocols Series; IOCCG: Dartmouth, NS, Canada, 2019. [Google Scholar]
- Minnett, P.J. Consequences of sea surface temperature variability on the validation and applications of satellite measurements. J. Geophys. Res. Oceans 1991, 96, 18475–18489. [Google Scholar] [CrossRef]
- Loew, A.; Bell, W.; Brocca, L.; Bulgin, C.E.; Burdanowitz, J.; Calbet, X.; Donner, R.V.; Ghent, D.; Gruber, A.; Kaminski, T.; et al. Validation practices for satellite-based Earth observation data across communities. Rev. Geophys. 2017, 55, 779–817. [Google Scholar] [CrossRef] [Green Version]
- Ruddick, K.; De Cauwer, V.; Park, Y.; Moore, G. Seaborne measurements of near infrared water-leaving reflectance: The similarity spectrum for turbid waters. Limnol. Oceanogr. 2006, 51, 1167–1179. [Google Scholar] [CrossRef] [Green Version]
- Zibordi, G.; Holben, B.; Slutsker, I.; Giles, D.; D’Alimonte, D.; Mélin, F.; Berthon, J.-F.; Vandemark, D.; Feng, H.; Schuster, G.; et al. AERONET-OC: A network for the validation of ocean color primary product. J. Atmos. Ocean. Technol. 2009, 26, 1634–1651. [Google Scholar] [CrossRef]
- Claustre, H.; Bernard, S.; Berthon, J.-F.; Bishop, J.; Boss, E.; Coaranoan, C.; D’Ortenzio, F.; Johnson, K.; Lotliker, A.; Ulloa, O. Bio-Optical Sensors on Argo Floats; Technical Report No. 11; IOCCG: Dartmouth, NS, Canada, 2011. [Google Scholar]
- Antoine, D.; Guevel, P.; Desté, J.-F.; Bécu, G.; Louis, F.; Scott, A.J.; Bardey, P. The BOUSSOLE buoy—A new transparent-to-swell taut mooring dedicated to marine optics: Design, tests, and performance at sea. J. Atmos. Ocean. Technol. 2008, 25, 968–989. [Google Scholar] [CrossRef]
- Antoine, D.; d’Ortenzio, F.; Hooker, S.B.; Bécu, G.; Gentili, B.; Tailliez, D.; Scott, A.J. Assessment of uncertainty in the ocean reflectance determined by three satellite ocean color sensors (MERIS, SeaWiFS and MODIS-A) at an offshore site in the Mediterranean Sea (BOUSSOLE project). J. Geophys. Res. 2008, 113. [Google Scholar] [CrossRef]
- Clark, D.K.; Gordon, H.R.; Voss, K.J.; Ge, Y.; Broenkow, W.; Trees, C. Validation of atmospheric correction over the oceans. J. Geophys. Res. 1997, 102, 17209–17217. [Google Scholar] [CrossRef]
- Clark, D.K.; Yarbrough, M.A.; Feinholz, M.; Flora, S.; Broenkow, W.; Kim, Y.S.; Johnson, B.C.; Brown, S.W.; Yuen, M.; Mueller, J.L. MOBY, a radiometric buoy for performance monitoring and vicarious calibration of satellite ocean color sensors: Measurement and data analysis protocols. Chapter 2. In Ocean Optics Protocols for Satellite Ocean Color Sensor Validation: Special Topics in Ocean Optics Protocols and Appendices; Technical Report No. TM-2003-211621/Rev4; NASA: Greenbelt, MD, USA, 2003; Volume 6, pp. 3–34. [Google Scholar]
- Brown, S.W.; Flora, S.J.; Feinholz, M.E.; Yarbrough, M.A.; Houlihan, T.; Peters, D.; Kim, Y.S.; Mueller, J.L.; Johnson, B.C.; Clark, D.K. The Marine Optical Buoy (MOBY) Radiometric Calibration and Uncertainty Budget for Ocean Color Satellite Sensor Vicarious Calibration.; SPIE Proceedings: Bellingham, WA, USA, 2007; Volume 67441. [Google Scholar]
- Austin, R.W.; Halikas, G. The Index of Refraction of Seawater; Technical Report 76-1; Scripps Institution of Oceanography: San Diego, CA, USA, 1976. [Google Scholar]
- Gordon, H.R. Normalized water-leaving radiance: Revisiting the influence of surface roughness. Appl. Opt. 2005, 44, 241. [Google Scholar] [CrossRef] [PubMed]
- Preisendorfer, R.W.; Mobley, C.D. Albedos and glitter patterns of a wind-roughened sea surface. J. Phys. Oceanogr. 1986, 16, 1293–1316. [Google Scholar] [CrossRef]
- Voss, K.J.; Flora, S.J. Spectral dependence of the seawater-air radiance transmission coefficient. J. Atmos. Ocean. Technol. 2017, 34, 1203–1205. [Google Scholar] [CrossRef]
- Röttgers, R.; Doerffer, R.; McKee, D.; Schönfeld, W. The Water Optical Properties Processor (WOPP): Pure Water Spectral Absorption, Scattering and Real Part of Refractive Index Model; Technical Report No WOPP-ATBD/WRD6; HZG: Geesthaacht, Germany, 2011; p. 20. Available online: http://calvalportal.ceos.org/data_access-tools (accessed on 24 July 2019).
- Li, L.; Stramski, D.; Reynolds, R.A. Effects of inelastic radiative processes on the determination of water-leaving spectral radiance from extrapolation of underwater near-surface measurements. Appl. Opt. 2016, 55, 7050. [Google Scholar] [CrossRef]
- Zaneveld, J.R.; Boss, E.; Hwang, P. The influence of coherent waves on the remotely sensed reflectance. Opt. Express 2001, 9, 260. [Google Scholar] [CrossRef] [PubMed]
- D’Alimonte, D.; Zibordi, G.; Kajiyama, T.; Cunha, J.C. Monte Carlo code for high spatial resolution ocean color simulations. Appl. Opt. 2010, 49, 4936–4950. [Google Scholar] [CrossRef] [PubMed]
- Darecki, M.; Stramski, D.; Sokólski, M. Measurements of high-frequency light fluctuations induced by sea surface waves with an underwater porcupine radiometer system. J. Geophys. Res. Oceans 2011, 116. [Google Scholar] [CrossRef]
- Hieronymi, M.; Macke, A. On the influence of wind and waves on underwater irradiance fluctuations. Ocean Sci. 2012, 8, 455–471. [Google Scholar] [CrossRef] [Green Version]
- Hieronymi, M. Polarized reflectance and transmittance distribution functions of the ocean surface. Opt. Express 2016, 24, A1045. [Google Scholar] [CrossRef] [PubMed]
- Gernez, P.; Stramski, D.; Darecki, M. Vertical changes in the probability distribution of downward irradiance within the near-surface ocean under sunny conditions. J. Geophys. Res. 2011, 116. [Google Scholar] [CrossRef]
- Monahan, E.C.; Muircheartaigh, I. Optimal power-law description of oceanic whitecap coverage dependence on wind speed. J. Phys. Oceanogr. 1980, 10, 2094–2099. [Google Scholar] [CrossRef]
- Zibordi, G.; Berthon, J.-F.; D’Alimonte, D. An evaluation of radiometric products from fixed-depth and continuous in-water profile data from moderately complex waters. J. Atmos. Ocean. Technol. 2009, 26, 91–106. [Google Scholar] [CrossRef]
- Voss, K.J. Radiance distribution measurements in coastal water; SPIE Proceedings: Bellingham, WA, USA, 1988; Volume 0925, pp. 56–66. [Google Scholar]
- D’Alimonte, D.; Shybanov, E.B.; Zibordi, G.; Kajiyama, T. Regression of in-water radiometric profile data. Opt. Express 2013, 21, 27707–27733. [Google Scholar] [CrossRef]
- Voss, K.J.; Gordon, H.R.; Flora, S.; Johnson, B.C.; Yarbrough, M.A.; Feinholz, M.; Houlihan, T. A method to extrapolate the diffuse upwelling radiance attenuation coefficient to the surface as applied to the Marine Optical Buoy (MOBY). J. Atmospheric Ocean. Technol. 2017, 34, 1423–1432. [Google Scholar] [CrossRef]
- Gordon, H.R.; Ding, K. Self-shading of in-water optical instruments. Limnol. Oceanogr. 1992, 37, 491–500. [Google Scholar] [CrossRef]
- Zibordi, G.; Ferrari, G.M. Instrument self-shading in underwater optical measurements: Experimental data. Appl. Opt. 1995, 34, 2750–2754. [Google Scholar] [CrossRef] [PubMed]
- Leathers, R.A.; Downes, T.V.; Mobley, C.D. Self-shading correction for oceanographic upwelling radiometers. Opt. Express 2004, 12, 4709–4718. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mueller, J.L. Shadow corrections to in-water upwelled radiance measurments: A status review. In Ocean Optics Protocols for Satellite Ocean Color Sensor Validation, Revision 5: Special Topics in Ocean Optics Protocols, Part 2; NASA Technical Memorandum NASA: Greenbelt, MD, USA, 2004; Volume 6, pp. 1–7. [Google Scholar]
- Patil, J.S.; Kimoto, H.; Kimoto, T.; Saino, T. Ultraviolet radiation (UV-C): A potential tool for the control of biofouling on marine optical instruments. Biofouling 2007, 23, 215–230. [Google Scholar] [CrossRef] [PubMed]
- Antoine, D.; Curtin University, Perth, Australia. Personal Communication, 2017.
- Vellucci, V.; Laboratoire Océanographique de Villefranche, Université de Sorbonne, Villefranche-sur-mer, France. Personal communication, 2018.
- Hooker, S.B.; Morrow, J.H.; Matsuoka, A. Apparent optical properties of the Canadian Beaufort Sea; Part 2: The 1% and 1 cm perspective in deriving and validating AOP data products. Biogeosciences 2013, 10, 4511. [Google Scholar] [CrossRef]
- Beltrán-Abaunza, J.M.; Kratzer, S.; Brockmann, C. Evaluation of MERIS products from Baltic Sea coastal waters rich in CDOM. Ocean Sci. 2014, 10, 377–396. [Google Scholar] [CrossRef] [Green Version]
- Froidefond, J.M.; Ouillon, S. Introducing a mini-catamaran to perform reflectance measurements above and below the water surface. Opt. Express 2005, 13, 926–936. [Google Scholar] [CrossRef]
- Talone, M.; Zibordi, G.; Lee, Z.P. Correction for the non-nadir viewing geometry of AERONET-OC above water radiometry data: An estimate of uncertainties. Opt. Express 2018, 26, 541–561. [Google Scholar] [CrossRef]
- Hooker, S.B.; Maritorena, S. An evaluation of oceanographic radiometers and deployment methodologies. J. Atmos. Ocean. Technol. 2000, 17, 811–830. [Google Scholar] [CrossRef]
- Gerbi, G.P.; Boss, E.; Werdell, P.J.; Proctor, C.W.; Haëntjens, N.; Lewis, M.R.; Brown, K.; Sorrentino, D.; Zaneveld, J.R.V.; Barnard, A.H.; et al. Validation of ocean color remote sensing reflectance using autonomous floats. J. Atmos. Ocean. Technol. 2016, 33, 2331–2352. [Google Scholar] [CrossRef]
- Leymarie, E.; Penkerc’h, C.; Vellucci, V.; Lerebourg, C.; Antoine, D.; Boss, E.; Lewis, M.R.; D’Ortenzio, F.; Claustre, H. ProVal: A new autonomous profiling float for high quality radiometric measurements. Front. Mar. Sci. 2018, 5, 437. [Google Scholar] [CrossRef]
- Smith, R.C.; Booth, C.R.; Star, J.L. Oceanographic biooptical profiling system. Appl. Opt. 1984, 23, 2791–2797. [Google Scholar] [CrossRef] [PubMed]
- Voss, K.J.; Nolten, J.W.; Edwards, G.D. Ship shadow effects on apparent optical properties. In Ocean Optics VIII; SPIE Proceedings 0637; SPIE: Bellingham, WA, USA, 1986; pp. 186–190. [Google Scholar]
- Mueller, J.L. In-water radiometric profile measurements and data analysis protocols. In Ocean Optics Protocols for Satellite Ocean Color Sensor Validation, Revision 4, Volume III: Radiometric Measurements and Data Analysis Protocols; NASA Technical Memorandum 2003-21621: Greenbelt, MD, USA, 2003; Chapter 2; pp. 7–20. [Google Scholar]
- Waters, K.J.; Smith, R.C.; Lewis, M.R. Avoiding ship-induced light-field perturbation in the determination of oceanic optical properties. Oceanography 1990, 3, 18–21. [Google Scholar] [CrossRef]
- Yarbrough, M.; Feinholz, M.; Flora, S.; Houlihan, T.; Johnson, B.C.; Kim, Y.S.; Murphy, M.Y.; Ondrusek, M.; Clark, D. Results in Coastal Waters with High Resolution in Situ Spectral Radiometry: The Marine Optical System ROV; SPIE: Bellingham, WA, USA, 2007; Volume 6680. [Google Scholar]
- Zibordi, G.; Doyle, J.-P.; Hooker, S.B. Offshore tower shading effects on in-water optical measurements. J. Atmos. Ocean. Technol. 1999, 16, 1767–1779. [Google Scholar] [CrossRef]
- Doyle, J.P.; Zibordi, G. Optical propagation within a three-dimensional shadowed atmosphere–ocean field: Application to large deployment structures. Appl. Opt. 2002, 41, 4283–4306. [Google Scholar] [CrossRef]
- D’Alimonte, D.; Zibordi, G.; Berthon, J.-F. The JRC data processing system. In Results of the Second SeaWiFS Data Analysis Round Robin, March 2000 (DARR-00); SeaWiFS Postlaunch Technical Report No. DARR-00; NASA: Greenbelt, MD, USA, 2001; Volume 15, pp. 52–56. [Google Scholar]
- Maritorena, S.; Hooker, S.B. The GSFC data processing system. In Results of the Second SeaWiFS Data Analysis Round Robin, March 2000 (DARR-00); SeaWiFS Postlaunch Technical Report No. DARR-00; NASA: Greenbelt, MD, USA, 2001; Volume 15, pp. 46–51. [Google Scholar]
- Morrow, J.H.; Hooker, S.B.; Booth, C.R.; Bernhard, G.; Lind, R.N.; Brown, J.W. Advances in measuring the apparent optical properties (AOPs) of optically complex waters. NASA Tech. Memo 215856 2010, 42–50. [Google Scholar]
- Gordon, H.R. Ship perturbation of irradiance measurements at sea 1: Monte Carlo simulations. Appl. Opt. 1985, 24, 4172. [Google Scholar] [CrossRef]
- Zaneveld, J.R.V.; Boss, E.; Barnard, A. Influence of surface waves on measured and modeled irradiance profiles. Appl. Opt. 2001, 40, 1442. [Google Scholar] [CrossRef]
- Zibordi, G.; D’Alimonte, D.; Berthon, J.-F. An evaluation of depth resolution requirements for optical profiling in coastal waters. J. Atmos. Ocean. Technol. 2004, 21, 1059–1073. [Google Scholar] [CrossRef]
- Organelli, E.; Claustre, H.; Bricaud, A.; Schmechtig, C.; Poteau, A.; Xing, X.; Prieur, L.; D’Ortenzio, F.; Dall’Olmo, G.; Vellucci, V. A novel near-real-time quality-control procedure for radiometric profiles measured by bio-argo floats: Protocols and performances. J. Atmos. Ocean. Technol. 2016, 33, 937–951. [Google Scholar] [CrossRef]
- Mobley, C.D. Estimation of the remote-sensing reflectance from above-surface measurements. Appl. Opt. 1999, 38, 7442–7455. [Google Scholar] [CrossRef] [PubMed]
- Lee, Z.; Ahn, Y.-H.; Mobley, C.; Arnone, R. Removal of surface-reflected light for the measurement of remote-sensing reflectance from an above-surface platform. Opt. Express 2010, 18, 26313. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.; He, S.; Shabani, A.; Zhai, P.-W.; Du, K. Spectral sea surface reflectance of skylight. Opt. Express 2017, 25, A1. [Google Scholar] [CrossRef] [PubMed]
- Santer, R.; Zagolski, F.; Barker, K.; Huot, J.-P. Correction of the above water radiometric measurements for the sky dome reflection, accounting for polarization. In Proceedings of the MERIS/(A) ATSR & OLCI/SLSTR Preparatory Workshop, ESA Special Publication 711, European Space Agency, Noordwijk, The Netherlands, 15–19 October 2012. [Google Scholar]
- Mueller, J.L.; Davis, C.; Arnone, R.; Frouin, R.; Carder, K.; Lee, Z.P.; Steward, R.G.; Hooker, S.; Mobley, C.D.; McLean, S. Above-water radiance and remote sensing reflectance measurements and analysis protocols. In Ocean Optics Protocols for Satellite Ocean Color Sensor Validation Revision 4, Volume III; NASA: Greenbelt, MD, USA, 2003; Chapter 3; pp. 21–31. [Google Scholar]
- Fougnie, B.; Frouin, R.; Lecomte, P.; Deschamps, P.-Y. Reduction of skylight reflection effects in the above-water measurement of diffuse marine reflectance. Appl. Opt. 1999, 38, 3844–3856. [Google Scholar] [CrossRef] [PubMed]
- Deschamps, P.-Y.; Fougnie, B.; Frouin, R.; Lecomte, P.; Verwaerde, C. SIMBAD: A field radiometer for satellite ocean color validation. Appl. Opt. 2004, 43, 4055–4069. [Google Scholar] [CrossRef] [PubMed]
- Lee, Z.; Pahlevan, N.; Ahn, Y.-H.; Greb, S.; O’Donnell, D. Robust approach to directly measuring water-leaving radiance in the field. Appl. Opt. 2013, 52, 1693. [Google Scholar] [CrossRef]
- Hooker, S.B.; Lazin, G.; Zibordi, G.; McLean, S. An evaluation of above-and in-water methods for determining water-leaving radiances. J. Atmos. Ocean. Technol. 2002, 19, 486–515. [Google Scholar] [CrossRef]
- Gilerson, A.; Carrizo, C.; Foster, R.; Harmel, T. Variability of the reflectance coefficient of skylight from the ocean surface and its implications to ocean color. Opt. Express 2018, 26, 9615–9633. [Google Scholar] [CrossRef]
- Morel, A. In-water and remote measurements of ocean colour. Bound. Layer Meteorol. 1980, 18, 177–201. [Google Scholar] [CrossRef]
- Kutser, T.; Vahtmäe, E.; Paavel, B.; Kauer, T. Removing glint effects from field radiometry data measured in optically complex coastal and inland waters. Remote Sens. Environ. 2013, 133, 85–89. [Google Scholar] [CrossRef]
- Gould, R.W.; Arnone, R.A.; Sydor, M. Absorption, scattering and remote-sensing reflectance relationships in coastal waters: Testing a new inversion algorithm. J. Coast. Res. 2001, 17, 328–341. [Google Scholar]
- Ruddick, K.; Cauwer, V.D.; Van Mol, B. Use of the Near Infrared Similarity Spectrum for the Quality Control of Remote Sensing Data; Frouin, R.J., Babin, M., Sathyendranath, S., Eds.; SPIE Proceedings: Bellingham, WA, USA, 2005; Volume 5885. [Google Scholar]
- Cox, C.; Munk, W. Measurements of the roughness of the sea surface from photographs of the Sun’s glitter. J. Opt. Soc. Am. 1954, 44, 834–850. [Google Scholar] [CrossRef]
- Ocean Optics Web Book—Surface Reflectance Factors. Available online: http://www.oceanopticsbook.info/view/remote_sensing/level_3/surface_reflectance_factors (accessed on 24 July 2019).
- Mobley, C.D. Polarized reflectance and transmittance properties of windblown sea surfaces. Appl. Opt. 2015, 54, 4828. [Google Scholar] [CrossRef] [PubMed]
- Groetsch, P.M.M.; Gege, P.; Simis, S.G.H.; Eleveld, M.A.; Peters, S.W.M. Variability of adjacency effects in sky reflectance measurements. Opt. Lett. 2017, 42, 3359–3362. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Harmel, T.; Gilerson, A.; Tonizzo, A.; Chowdhary, J.; Weidemann, A.; Arnone, R.; Ahmed, S. Polarization impacts on the water-leaving radiance retrieval from above-water radiometric measurements. Appl. Opt. 2012, 51, 8324. [Google Scholar] [CrossRef]
- D’Alimonte, D.; Kajiyama, T. Effects of light polarization and waves slope statistics on the reflectance factor of the sea surface. Opt. Express 2016, 24, 7922. [Google Scholar] [CrossRef] [PubMed]
- Foster, R.; Gilerson, A. Polarized transfer functions of the ocean surface for above-surface determination of the vector submarine light field. Appl. Opt. 2016, 55, 9476. [Google Scholar] [CrossRef]
- Groetsch, P.M.M.; Gege, P.; Simis, S.G.H.; Eleveld, M.A.; Peters, S.W.M. Validation of a spectral correction procedure for sun and sky reflections in above-water reflectance measurements. Opt. Express 2017, 25, A742. [Google Scholar] [CrossRef]
- Simis, S.G.H.; Olsson, J. Unattended processing of shipborne hyperspectral reflectance measurements. Remote Sens. Environ. 2013, 135, 202–212. [Google Scholar] [CrossRef] [Green Version]
- Zibordi, G. Experimental evaluation of theoretical sea surface reflectance factors relevant to above-water radiometry. Opt. Express 2016, 24, A446–A459. [Google Scholar] [CrossRef]
- Hooker, S.B.; Morel, A. Platform and environmental effects on above-water determinations of water-leaving radiances. J. Atmos. Ocean. Technol. 2003, 20, 187–205. [Google Scholar] [CrossRef]
- Hlaing, S.; Harmel, T.; Ibrahim, A.; Ioannou, I.; Tonizzo, A.; Gilerson, A.; Ahmed, S. Validation of Ocean Color Satellite Sensors Using Coastal Observational Platform in Long Island Sound; SPIE Proceedings: Bellingham, WA, USA, 2010; Volume 7825, p. 782504-1-8. [Google Scholar]
- Hooker, S.B. The telescopic mount for advanced solar technologies (T-MAST). In Advances in Measuring the Apparent Optical Properties (AOPs) of Optically Complex Waters; Technical Report No. 215856; NASA: Greenbelt, MD, USA, 2010. [Google Scholar]
- Hooker, S.B.; Lazin, G. The SeaBOARR-99 Field Campaign; Technical Report No. 2000-206892; NASA: Greenbelt, MD, USA, 2000; Volume 8, p. 46.
- Zibordi, G.; Hooker, S.B.; Berthon, J.F.; D’Alimonte, D. Autonomous above-water radiance measurements from an offshore platform: A field assessment experiment. J. Atmos. Ocean. Technol 2002, 19, 808–819. [Google Scholar] [CrossRef]
- Carrizo, C.; Gilerson, A.; Foster, R.; Golovin, A.; El-Habashi, A. Characterization of radiance from the ocean surface by hyperspectral imaging. Opt. Express 2019, 27, 1750–1768. [Google Scholar] [CrossRef] [PubMed]
- Hooker, S.B.; Bernhard, G.; Morrow, J.H.; Booth, C.R.; Comer, T.; Lind, R.N.; Quang, V. Optical Sensors for Planetary Radiant Energy (OSPREy): Calibration and Validation of Current and Next-Generation NASA Missions; Technical Report No. 2012-215872; NASA: Greenbelt, MD, USA, 2012.
- Gilerson, A.; Carrizo, C.; Foster, R.; Harmel, T.; Golovin, A.; El-Habashi, A.; Herrera, E.; Wright, T. Total and Polarized Radiance from the Ocean Surface from Hyperspectral Polarimetric Imaging.; SPIE: Bellingham, WA, USA, 2019; Volume 11014. [Google Scholar]
- Olszewski, J.; Sokolski, M. Elimination of the surface background in contactless sea investigations. Oceanologia 1990, 29, 213–221. [Google Scholar]
- Tanaka, A.; Sasaki, H.; Ishizaka, J. Alternative measuring method for water-leaving radiance using a radiance sensor with a domed cover. Opt. Express 2006, 14, 3099. [Google Scholar] [CrossRef] [PubMed]
- Shang, Z.; Lee, Z.; Dong, Q.; Wei, J. Self-shading associated with a skylight-blocked approach system for the measurement of water-leaving radiance and its correction. Appl. Opt. 2017, 56, 7033. [Google Scholar] [CrossRef] [PubMed]
- Vansteenwegen, D.; Ruddick, K.; Cattrijsse, A.; Vanhellemont, Q.; Beck, M. The pan-and-tilt hyperspectral radiometer system (PANTHYR) for autonomous satellite validation measurements—Prototype design and testing. Remote Sens. 2019, 11, 1360. [Google Scholar] [CrossRef]
- Garaba, S.P.; Schulz, J.; Wernand, M.R.; Zielinski, O. Sunglint detection for unmanned and automated platforms. Sensors 2012, 12, 12545–12561. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Underwater Fixed Depths | Underwater Profiling | Above-Water | Skylight-Blocked | |
|---|---|---|---|---|
| Equipment (in addition to ship/platform/buoy) | 2 radiance sensors Inclinometer Pressure/depth sensor | Radiance sensor and profiling platform Inclinometer Pressure/depth sensor | Radiance sensor and robotic/human pointing or 2 radiance sensors Inclinometer, Compass/protractor | Radiance sensor Sky-blocking cone/shield Inclinometer |
| Standard (S) and Variants (V) | S: tethered buoy, at least two fixed depths V: Single very near-surface radiometer; single radiometer successively at different depths | S: free-fall away from ship V: platform/mooring-tethered vertical wire; Horizontally drifting platforms | S: unpolarised radiometer V: vertical polarizer option | S: tethered buoy V: boats and other platforms |
| Viewing geometry | Nadir | Nadir | Off-nadir, usually and or | Nadir (or off-nadir) |
| Protocol maturity/diversity | Mature | Mature | Mature basis but also diverse and evolving skyglint corrections | Mature |
| Automation maturity | Operational | Prototype | Operational | Feasible |
| Automation challenges | Fore-optics contamination | Fore-optics contamination Mechanical reliability of profiling (fixed location systems) | Fore-optics contamination | Fore-optics contamination |
| Challenging water types/wavelengths/conditions | High (high CDOM/NAP blue, red, near infrared) High waves Very shallow or stratified waters | High (high CDOM/NAP blue, red, near infrared) High waves Very shallow or stratified waters | Low reflectance (high CDOM blue, low backscatter red/near infrared) High waves Scattered clouds in sky-viewing direction | High waves |
| Underwater Fixed Depths | Underwater Profiling | Above-Water | Skylight-Blocked | |
|---|---|---|---|---|
| Non-exponential vertical variation | I: Known (e.g., exponential) variation R: Extra depths, profiles and modelling U: as R. | I: Known (e.g., exponential) variation R: Measure close to surface U: Goodness-of-fit tests, modelling | N/A | N/A |
| Tilt | I: Deploy vertical R: Monitor inclination and pressure U: Modelling, time series analysis | I: Deploy vertical R: Stable free-fall or wire-guided, Monitor inclination and pressure U: Modelling, time series analysis | I: Accurate pointing, stable platform R: Monitor inclination U: Modelling | I: Stable platform R: Monitor inclination U: Modelling, time series analysis |
| Self-shading from radiometer | I: Negligible size radiometer R: Small diameter radiometer U: Modelling | I: Negligible size radiometer R: Small diameter radiometer U: Modelling | N/A (in general) | I: Negligible size cone/shield R: Small diameter cone/shield U: Modelling |
| Self-shading from structure/platform | I: Negligible size superstructure R: Limit cross-section, horizontal arms, redundant radiometers U: Modelling, comparison of redundant radiometers | I: Negligible size superstructure R: Limit cross-section, deploy away from ship, redundant radiometers U: Modelling, comparison of redundant radiometers | I: Negligible size superstructure R: Target away from platform (masts) or ship (forward from prow), azimuth filtering to avoid shadow U: Modelling, experiments (different heights/positions/azimuths) | I: Negligible size platform R: Limit cross-section, horizontal arms, redundant radiometers U: Modelling, comparison of redundant radiometers |
| Fore-optics contamination | I: Keep fore-optics clean (in water) R: Inspect/clean/protect, monitor with portable cal devices U: Pre-/post-cleaning cal of radiometer | I: Keep fore-optics clean (in water) R: Inspect/clean/protect, monitor with portable cal devices U: Pre-/post-cleaning cal of radiometer | I: Keep fore-optics clean (in air) R: Inspect/clean/protect, monitor with portable cal devices U: Pre-/post-cleaning cal of radiometer | I: Keep fore-optics clean (in air, close to water) R: Inspect/clean/protect, monitor with portable cal devices U: Pre-/post-cleaning cal of radiometer |
| Temporal fluctuations | I: Clear sky, flat water R: Time series analysis U: Modelling, time series analysis | I: Clear sky, flat water R: Time series analysis, multi-casting U: Modelling, time series and multi-cast analysis | (here for sky, see below for waves) I: Clear, stable sky R: Replicates U: Standard deviation of replicates | I: Clear sky, flat water R: Time series analysis U: Modelling, time series analysis |
| Skylight reflection correction | N/A | N/A | I: Flat sea R: Very diverse, see text U: Very diverse, see text | N/A |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ruddick, K.G.; Voss, K.; Boss, E.; Castagna, A.; Frouin, R.; Gilerson, A.; Hieronymi, M.; Johnson, B.C.; Kuusk, J.; Lee, Z.; et al. A Review of Protocols for Fiducial Reference Measurements of Water-Leaving Radiance for Validation of Satellite Remote-Sensing Data over Water. Remote Sens. 2019, 11, 2198. https://doi.org/10.3390/rs11192198
Ruddick KG, Voss K, Boss E, Castagna A, Frouin R, Gilerson A, Hieronymi M, Johnson BC, Kuusk J, Lee Z, et al. A Review of Protocols for Fiducial Reference Measurements of Water-Leaving Radiance for Validation of Satellite Remote-Sensing Data over Water. Remote Sensing. 2019; 11(19):2198. https://doi.org/10.3390/rs11192198
Chicago/Turabian StyleRuddick, Kevin G., Kenneth Voss, Emmanuel Boss, Alexandre Castagna, Robert Frouin, Alex Gilerson, Martin Hieronymi, B. Carol Johnson, Joel Kuusk, Zhongping Lee, and et al. 2019. "A Review of Protocols for Fiducial Reference Measurements of Water-Leaving Radiance for Validation of Satellite Remote-Sensing Data over Water" Remote Sensing 11, no. 19: 2198. https://doi.org/10.3390/rs11192198