1. Introduction
The Future Sustainability Computing (FSC) framework provides abundant possibilities for pervasive computing environments. The framework is an integration of diverse types of internet technology-based policies, procedures, and programs. To ensure user-friendly services in the framework, it is essential to obtain and analyze user information, based on which the location of a user can be accurately determined. Actually, the location of a user constitutes the core of such information. A wearable location system [
1] that can be used to determine the location of a particular user is introduced for a lecture theater. A radio map is generated in the area where the various users are present, based on which the location of the user of interest is estimated. By establishing this location, diverse services can be provided.
Considering the inapplicability of a Global Positioning System (GPS) in an indoor environment, the estimation of a user location in an indoor FSC environment is much more difficult than in an outdoor one. A representative approach to estimating the user location is fingerprinting [
2], which involves comparing the signals of the users with those of a radio map. However, this requires the generation of multiple radio signals, each of which should be unique. Nevertheless, if multiple user signals have the same value, it would be difficult to use such an approach to determine the location of a particular user. Another approach is Received Signal Strength Indication (RSSI)-based trilateration, which involves the measurement of three RSSIs and estimation of the locations from which they are radiated. This approach, however, requires accurate RSSI-based distance estimation for good results.
This paper proposes a novel RSSI-based method for estimating the distance between a beacon and an Access Point (AP) in a sustainable indoor computing environment. The accuracy of the estimated distance can be improved through multiple processing of the beacon RSSIs.
The rest of this paper is organized as follows.
Section 2 discusses various processes for measuring RSSIs and estimating indoor distances.
Section 3 introduces and describes the proposed method.
Section 4 analyzes the results of the experimental implementation of the proposed method. Finally, the conclusions of the study are presented in
Section 5.
2. Overview of Distance Estimation
Different types of distance estimation methods are usually integrated to increase the accuracy of the results. This section introduces some generic processes for using RSSIs to estimate the distance between a beacon and an AP. Each process of the methods is also described in more detail.
2.1. Requirements for RSSI-Based Indoor Distance Estimation
RSSIs are very inaccurate and unstable in indoor FSC environments, and there is thus the need for revision of measured RSSIs before using them. First, noise filtering is required. In addition, when measuring or estimating RSSIs, any value that represents a sudden increase should be eliminated. Further, given that RSSIs do not increase linearly with distance, the error in a distance estimated based on RSSIs increases with increasing the measured distance.
However, RSSIs still remain unstable after noise filtering and there is a limit to improving the accuracy and robustness of RSSIs based on only the measured RSSIs. Diverse types of information such as environmental information are thus used to improve the accuracy and robustness of RSSIs. Environmental information is divided into two types, namely static information and dynamic information. Static information includes environmental configuration information such as the locations of APs, while dynamic information includes the locations of moving objects.
2.2. RSSI-Related Work
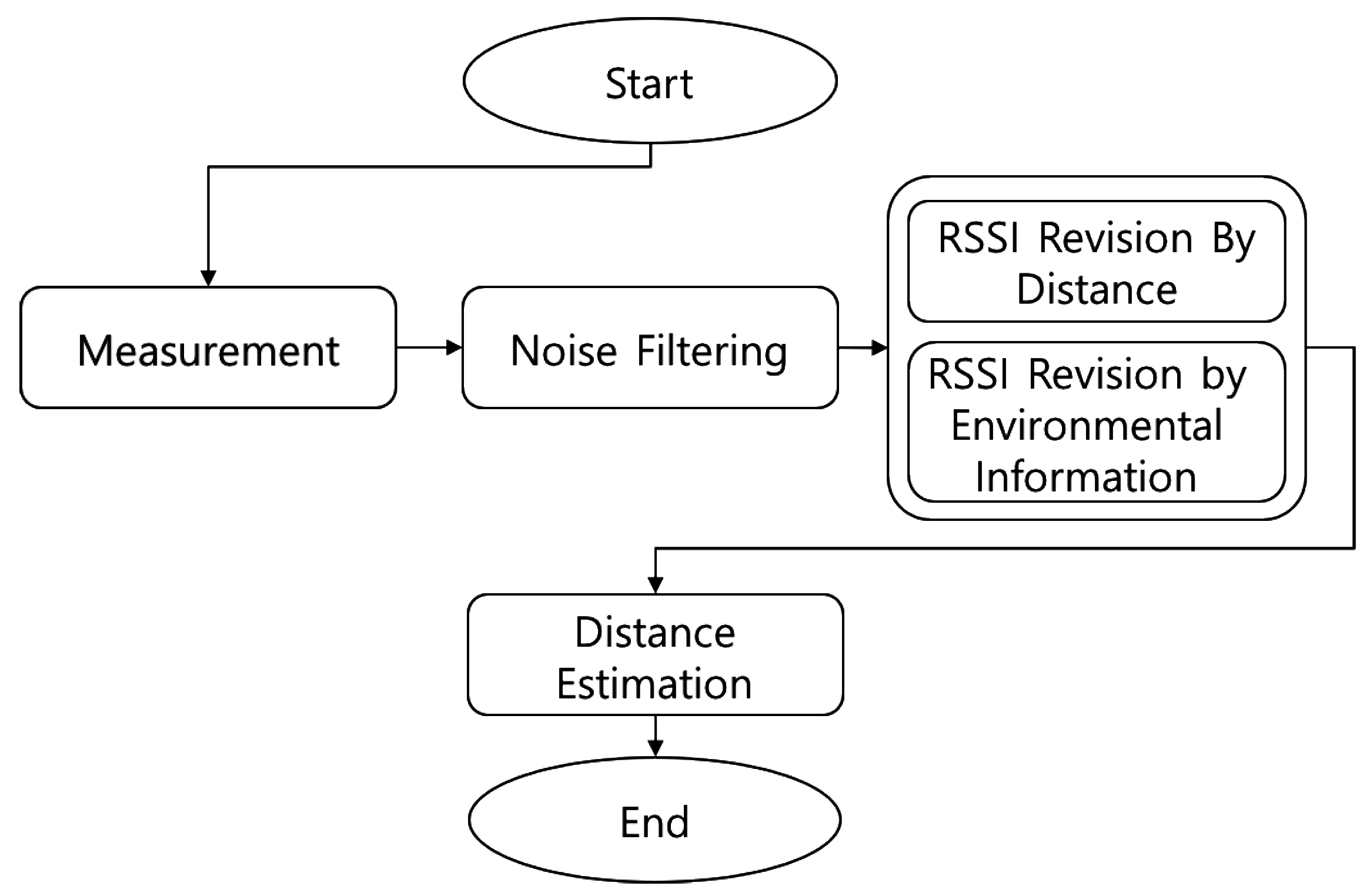
Indoor distance estimation requires minimal noise filtering, RSSI revision, and distance conversion.
Figure 1 shows generic processes for handling RSSIs for distance estimation. For RSSI noise filtering, the use of an impulse noise filter has been proposed [
3]. The noise filter is specifically used for real-time processing of a beacon-AP signal. The noises are filtered by revising all the ranges of the RSSIs, which are decreased or increased based on the distance from the AP. Another method for eliminating noise from RSSIs involves the detection and cutting of the peak values [
4]. The revised RSSIs are then used to estimate the distance to a given location [
5]. However, given that RSSIs do not vary linearly with distance, a technique for revising the measured RSSIs is required so that the measurements would vary linearly with the distance from the AP.
For RSSI revision, filtered RSSIs could be revised considering distance and environmental information. In the case of RSSI revision by distance, a previous study utilized a log-distance path loss model for this purpose [
6]. The model was used to predict the signal path in such a way that the RSSIs varied linearly with the distance. The log-distance path loss model has been applied to RSSIs in another study [
7], and also to the measurement of the distance from an AP [
8]. There is a limit to improving the accuracy of the revised RSSIs based on the information of measured RSSIs. Therefore, utilizing additional information is required. For example, environmental information such as locations, configurations, and so on can be utilized.
For distance estimation, the beacon signal–based distance is estimated based on the minimum and maximum signals [
7]. Given the irregularity of RSSIs measured in indoor environments, any observed changes in the RSSIs should be taken into consideration. Accordingly, the measured RSSIs are lengthened or shortened based on the minimum and maximum signals. Estimated locations are utilized in user interfaces [
9] in a pervasive computing environment for the control of diverse types of devices.
Given that the global positioning system (GPS) cannot be utilized to find locations in indoor environments, a variety of indoor-based location estimation approaches are proposed. For examples, a dynamic Bayesian network (DBN)-based approach is proposed to estimate locations in indoor environments [
10]. The approach generates and utilizes a probability graph. Gaussian interpolation is utilized to improve the quality of measured WiFi [
11]. According to the Gaussian interpolation, measured WiFi is converted into qualified signals. Crowd-sourced mapping and localization (CMAL) based on a wireless-fidelity (WiFi) localization system is proposed, which is one of the simultaneous localization and mapping (SLAM) approaches [
12]. CMAL consists of two sub-modules: the CAML client and the CAML server. The CMAL server utilizes the fingerprint map, which is generated by the CML client. The CMAL client generates the fingerprint map from the WiFi of multiple smart phones.
3. Beacon-Based Distance Estimation
This section describes the proposed distance estimation framework, which is based on the RSSIs of a beacon. The framework comprises multiple processes for using the measured RSSIs to estimate the distance from the beacon to an AP. Each of the processes is described below.
3.1. Distance Estimation Framework
The proposed distance estimation framework consists of two phases, namely the offline and online phases. The offline phase is used to determine the maximum (
dMax) and minimum (
dMin) measured RSSIs for use for distance estimation in the online phase. The distance revision is done using a log-distance path model, and also involves noise filtering using a Kalman filter and calculation of relative distances based on the determined
dMax and
dMin.
Figure 2 shows the flowchart of the proposed distance estimation framework.
The offline phase consists of RSSI measurement, log-distance revision, Kalman filtering, and the min-max detection stages. During RSSI measurement, the RSSIs are measured τ times to determine the maximum and minimum signals, which are used for relative distance conversion in the online phase. RSSI rt is the measured RSSI at time t. The log-distance revision and Kalman filtering processes are used to revise the measured RSSIs and to filter the noise of the measured RSSIs. The maximum signal d′Max and the minimum signal d′Min are determined from among the signals in a set D′, the set of the results of the Kalman filtering stage, during min-max detection. Given that the distance from an AP to the beacon is estimated based on the maximum and minimum signals, it is necessary to collect a sufficient number of RSSIs. If there are RSSIs in the online phase that are higher or lower than the maximum or minimum value measured in the offline phase, respectively, the distance estimation would be inaccurate. If the maximum RSSI is set to a value lower than the maximum RSSI measured in the online phase, the estimated distance would be too long. Conversely, if the minimum RSSI is set to a value higher than the value measured in the online phase, the estimated distance would be too short.
The online phase consists of RSSI measurement, log-distance revision, Kalman filtering, and relative distance estimation. All the measured RSSIs are transferred to the log-distance revision stage in the online phase. The procedures for using the above processes until distance estimation are described in more detail in the following sub-sections.
3.2. Log-Distance Revision Stage
Given that a RSSI does not vary linearly with distance, there is a need for a method for revising it to ensure linear variation based on its features. The log-distance revision stage in the offline and online phases is used for this purpose to enable the revision of RSSIs into distance. In this paper, the log-distance path loss model [
2] is used to calculate the equivalent distance
dt of an RSSI. This is done by multiplying
d0 by
, where
d0 is the reference distance,
r0 is the path loss of the reference RSSIs, and
λ is the path loss exponent. The distance
dt increases exponentially with
d0 because of the difference between
r0 and
rt.
3.3. Kalman Filtering Stage
Distances calculated in indoor environments are affected by noise. A Kalman filter is capable of filtering sudden changes in a signal during signal estimation based on preceding signals. In the proposed distance estimation framework, Kalman filtering is performed in both the offline and online phases. The Kalman filter is used to eliminate the effect of noise from the distance calculated in the log-distance revision stage. By this means, the distance dt is converted into distance d′t. In the offline phase, the Kalman filtering is performed between the log-distance revision stage and the min-max detection stage. The maximum and minimum RSSIs are compared with the Kalman-filtered distance in the relative distance estimation stage of the online phase. In this phase, the Kalman filtering is performed between the log-distance revision stage and the relative distance estimation stage.
3.4. Relative Distance Estimation Stage
The distance determined in an indoor environment after Kalman filtering is still inaccurate. There is thus the need for further revision of the distance to increase the accuracy. In this paper, the Kalman-filtered distances were normalized using the relative distance estimation method [
7]. Using the maximum and minimum distances determined in the offline phase, the relative distance
r″
t is estimated based on the RSSI
r′
t in the online phase. This relative distance estimation process is performed in only the online phase.
4. Experiments
This section describes how the RSSIs between a beacon and an AP are measured in the proposed distance estimation framework. The performance of the framework is also analyzed by comparing its results with those of other methods.
4.1. Experimental Configuration
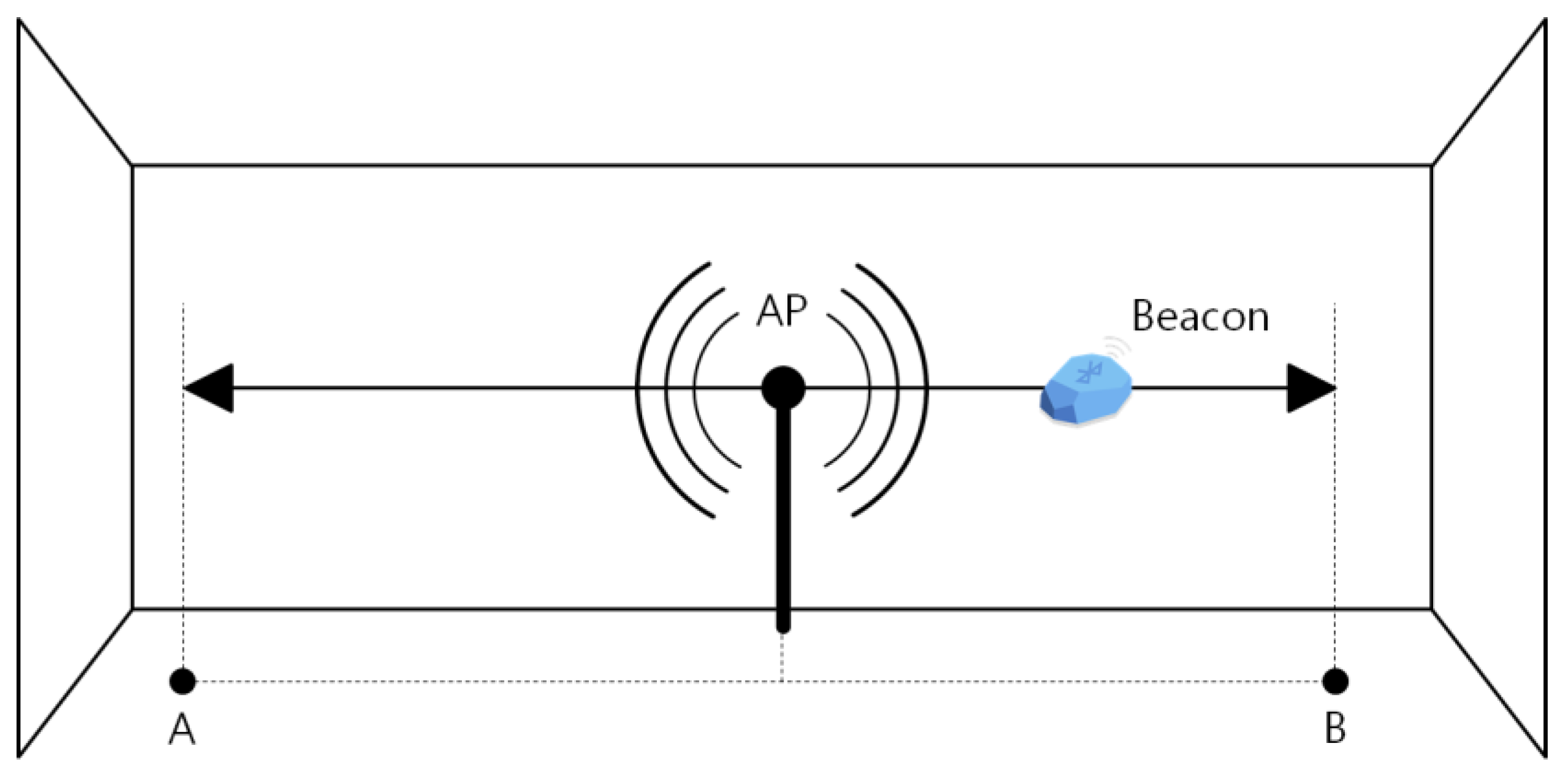
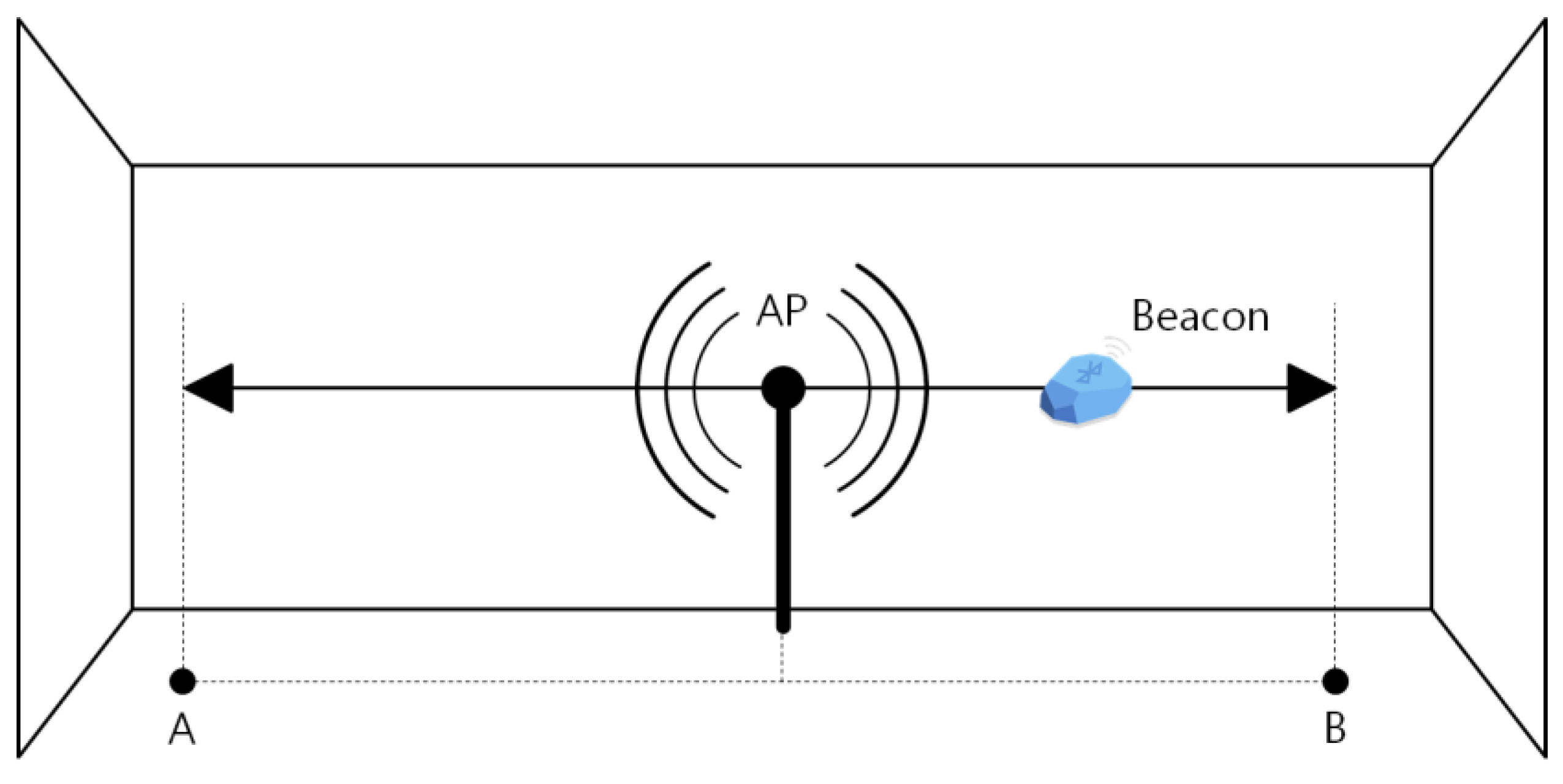
To validate the proposed framework, experiments were performed using the configuration in
Figure 3. The location of the AP was fixed while that of the beacon was repeatedly alternated between two specific points, A and B, at intervals of 1 s. The distance between A and B was 2 m, while the AP was located 1 m perpendicular from the line between A and B. The maximum distance
ζMax was thus
m, while the minimum distance
ζMin was 1 m.
4.2. Experimental Results
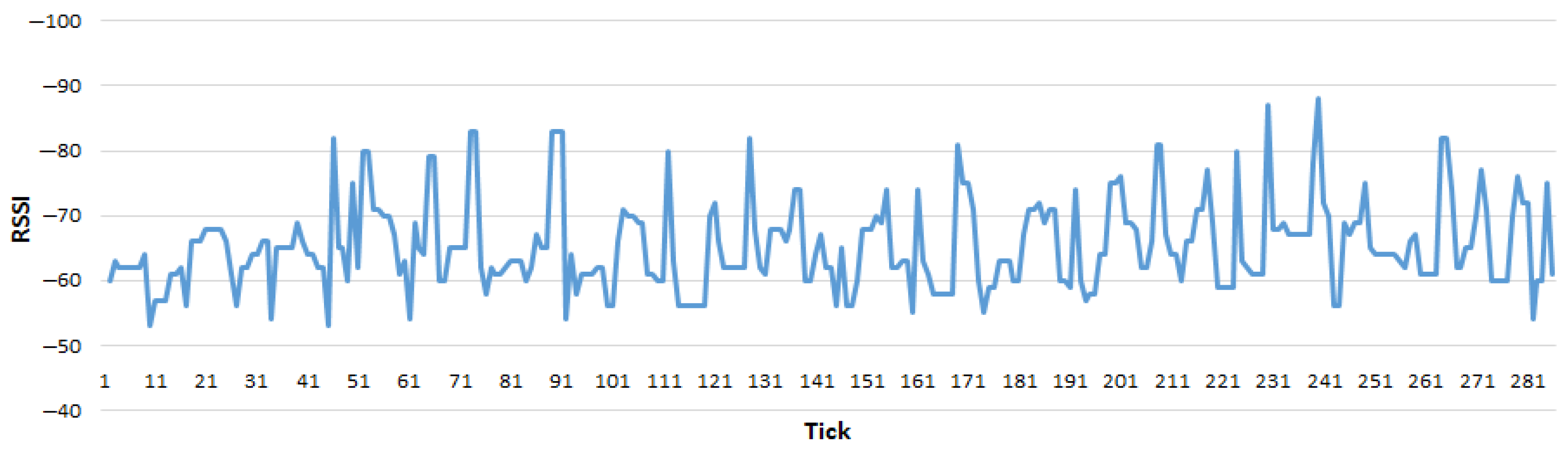
During the experiments, the RSSIs were measured as shown in
Figure 4. Almost all the RSSIs were found to be between −54 and −80. When the distance between an AP and the beacon was increased, the RSSIs decreased. In addition, the RSSIs gradually increased with the increasing number of measurements, resulting in decreased measurement accuracy. The measurement of the RSSIs of a moving beacon in the indoor environment was particularly observed to be inaccurate.
The measured RSSIs were filtered using a log-distance path loss model. The results are shown in
Figure 5.
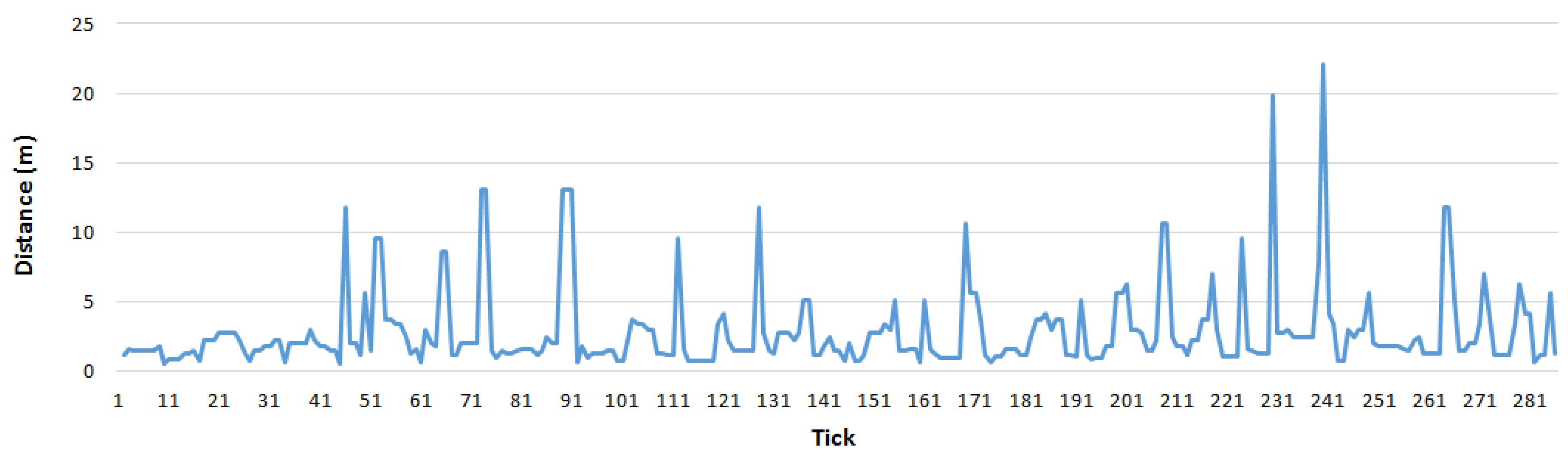
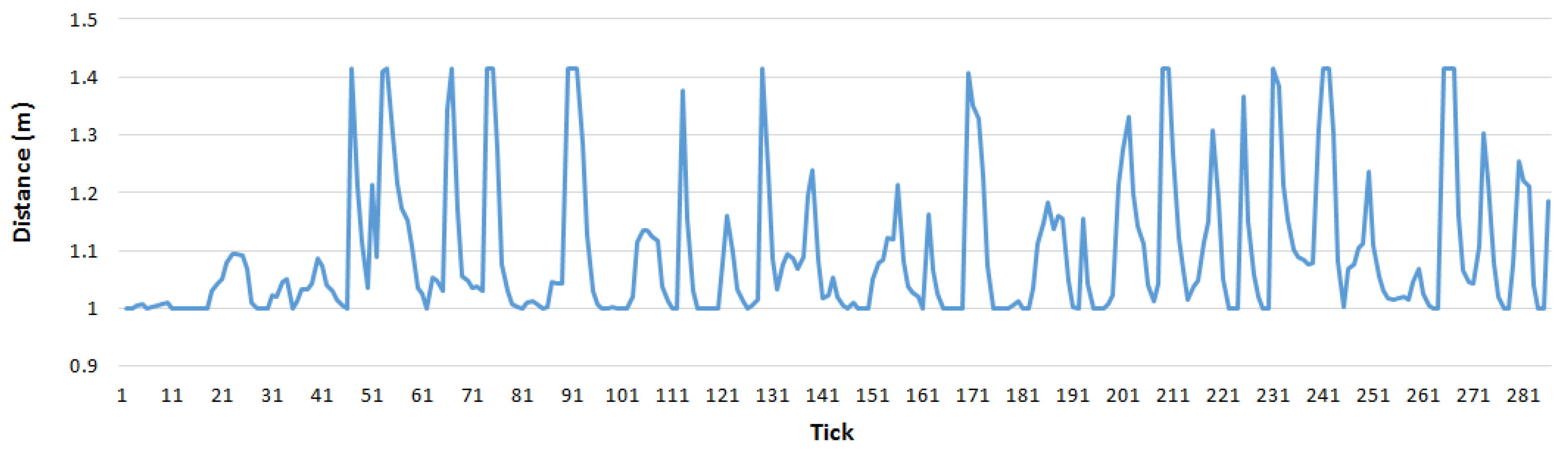
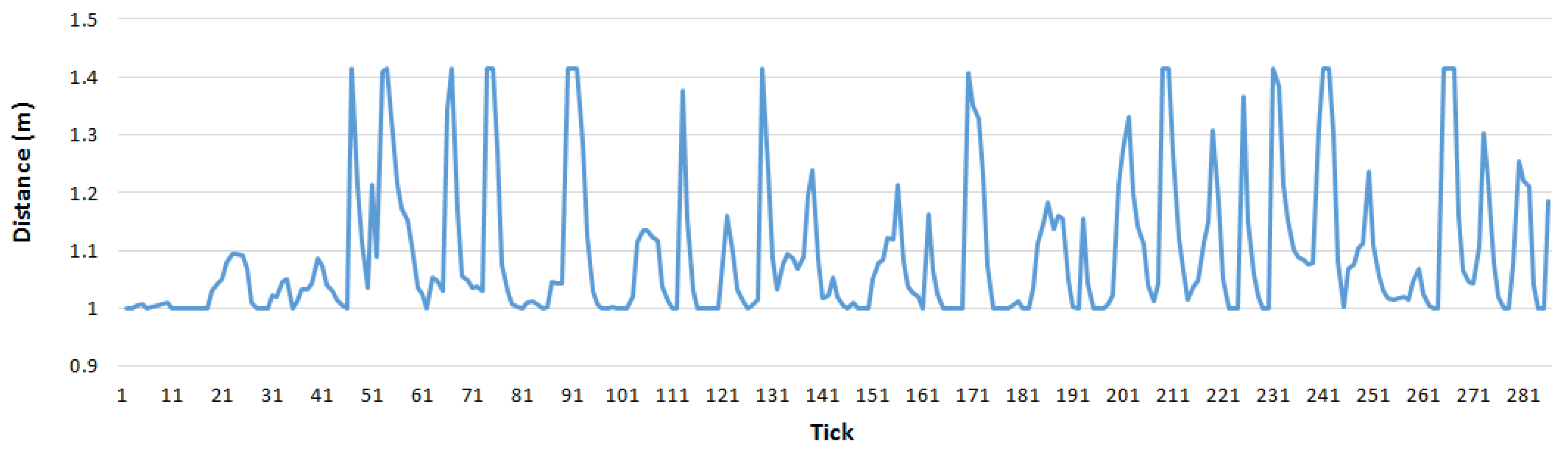
Figure 6 shows the distances estimated by the proposed method. The lowest and highest RSSIs were found to correspond to distances of 1 and
m, respectively, using the relative distance estimation method [
7]. The sudden increases in the signals were also reduced accordingly.
4.3. Performance Comparison
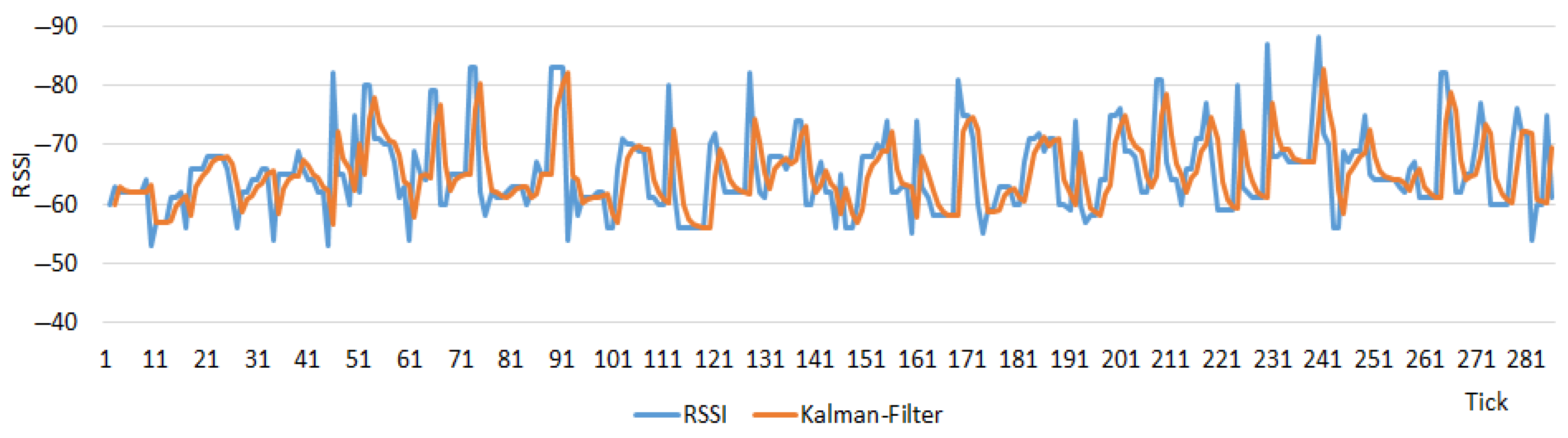
Kalman filtering is used to eliminate noise from the signals in the proposed distance estimation framework, as was implemented in the present study. The measured RSSIs were compared with the filtered RSSIs by the Kalman filter.
Figure 7 shows the performance of the Kalman filter applied to RSSIs. The graph of the Kalman filter shows smoother curves compared to those of the measured RSSIs.
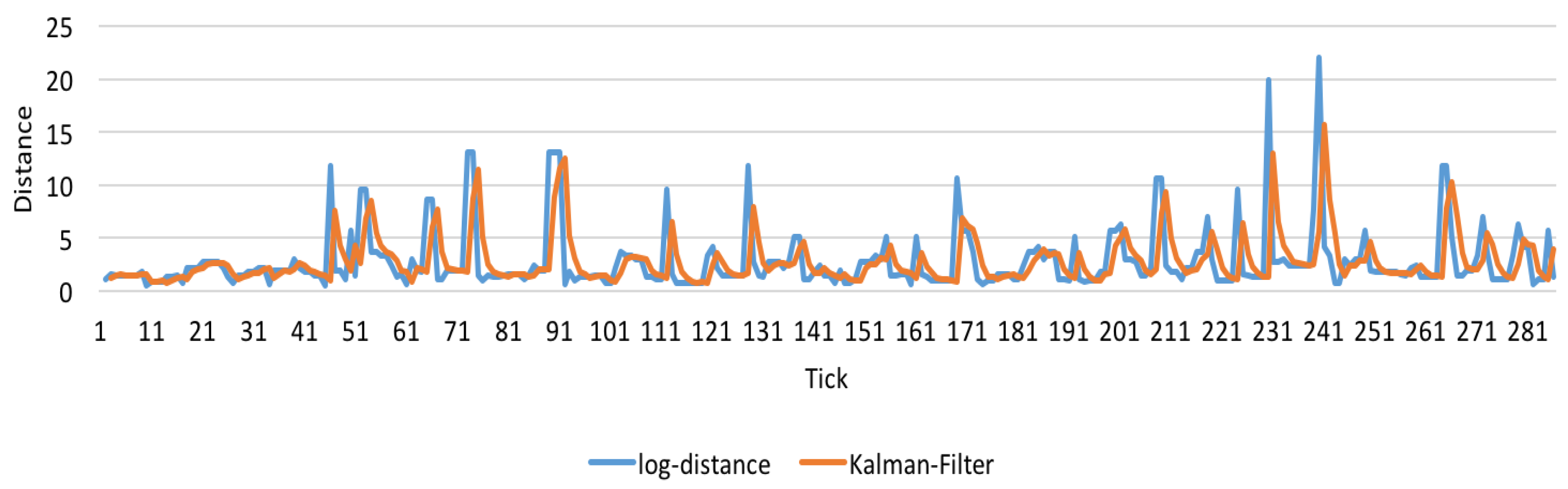
Figure 8 shows the performance of the Kalman filter applied to the log-distance path loss model. The graph of the Kalman filter applied to the log-distance path loss model also shows smoother curves compared to those of the log-distance path loss model.
To evaluate the performance of the Kalman filter in the proposed distance estimation framework, RSSI Filter (RF-III) [
3] was also used for this purpose. RF-III refines the impulse noises within RSSIs measured from a beacon to an AP. By applying RF-III to the two-directional signals of impulse noises, the impulse noises can be eliminated.
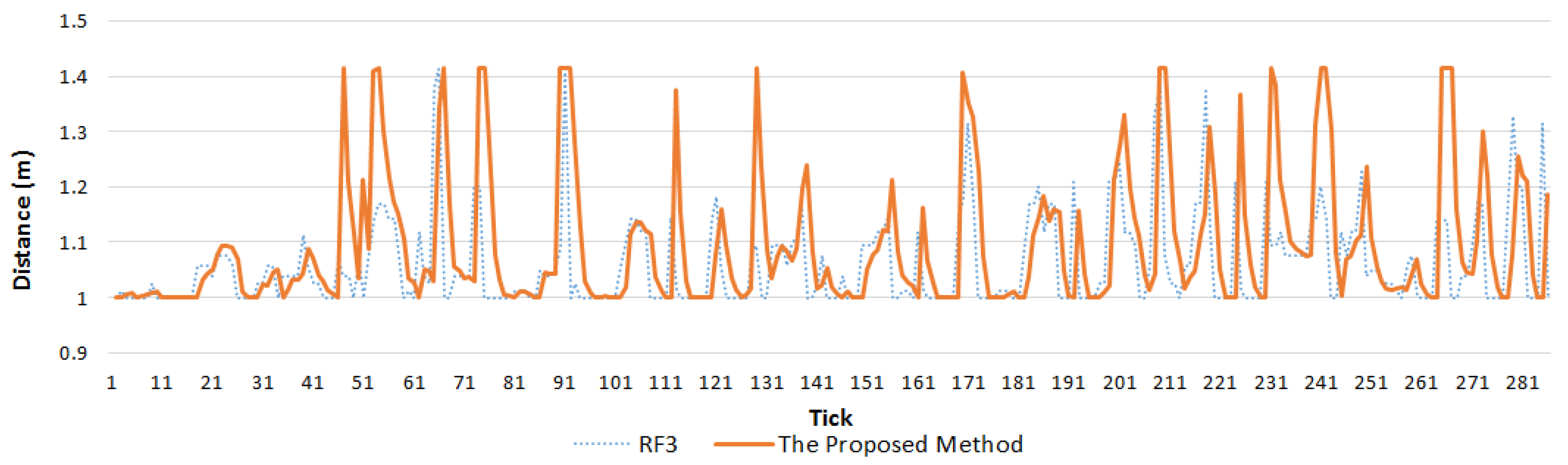
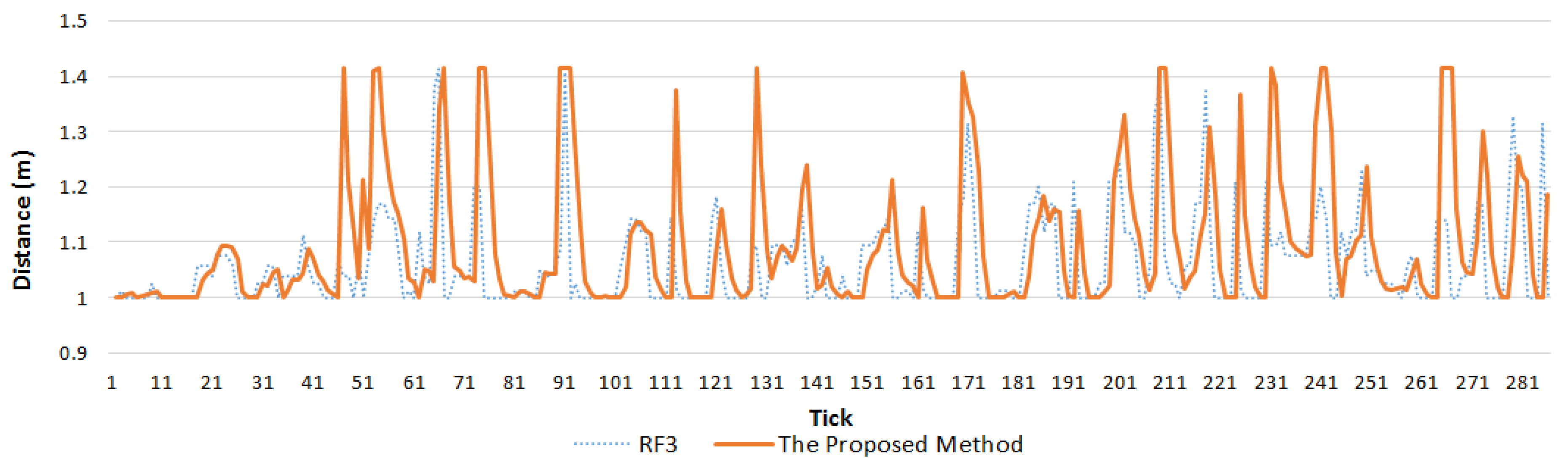
Figure 9 compares the two obtained results. Given that the Kalman filter estimated a signal based on previously measured signals, there is a right shift in the measured signals compared to the use of RF-III. The accumulated errors when using the two filters with respect to the real distances were also compared, and the Kalman filter was found to produce 8% fewer errors. The Kalman filter was thus confirmed to be more robust in the proposed method.
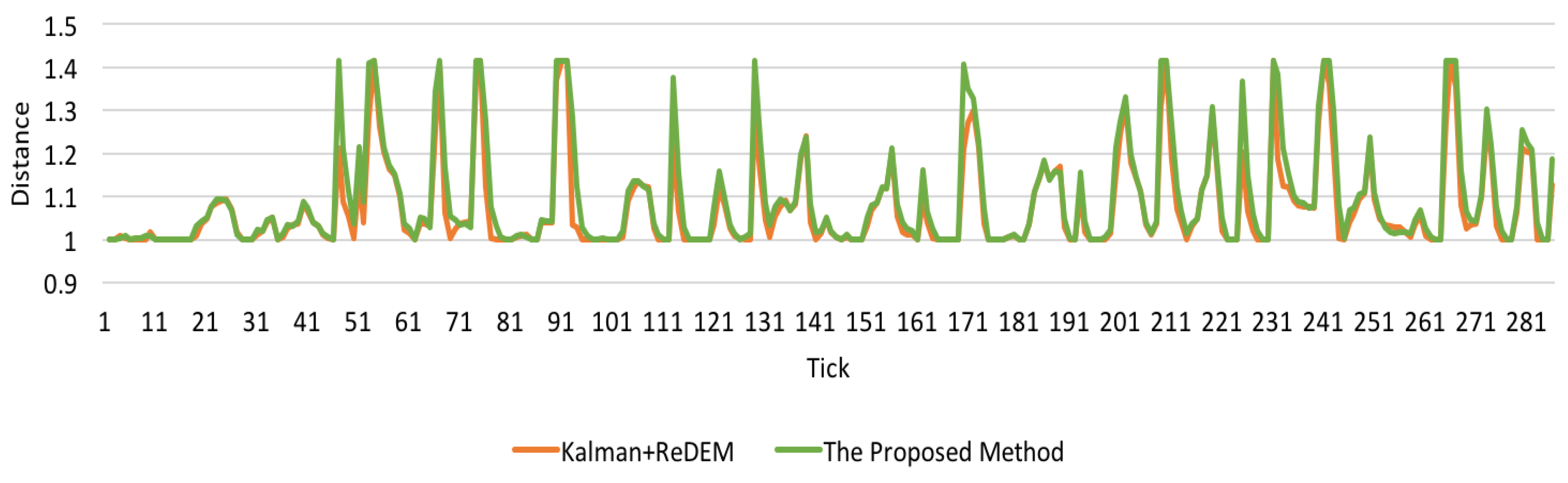
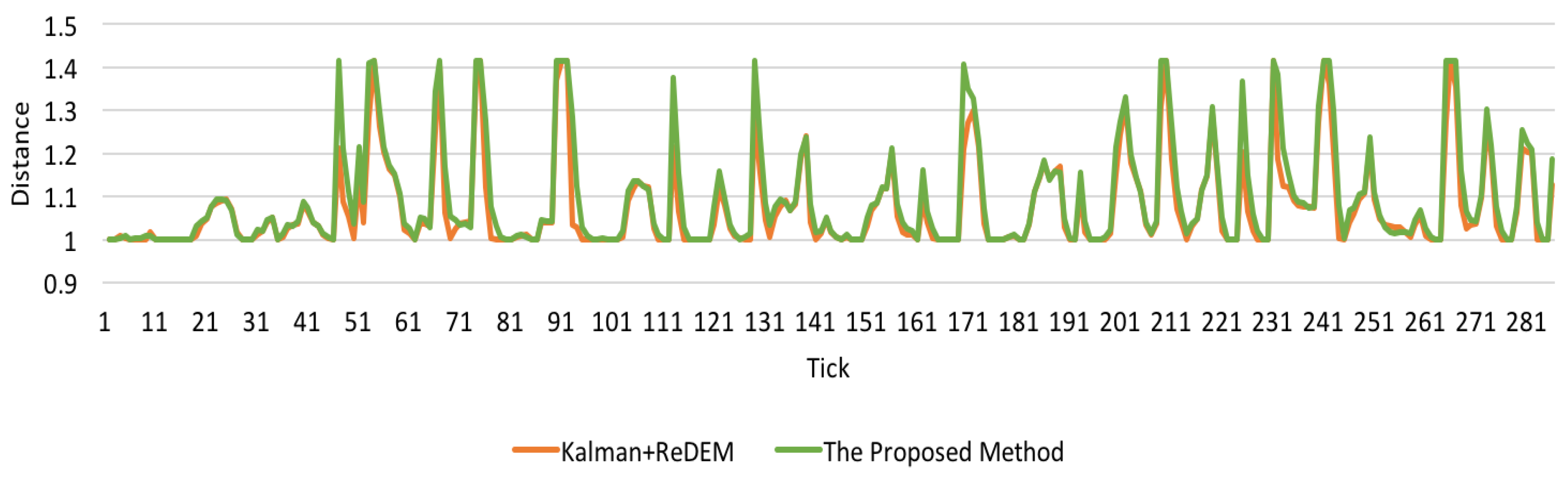
To validate the performance of the log-distance path loss model in the proposed framework, the performance of the proposed framework was compared to that of the integration of the Kalman filter and the traditional relative distance estimation method (ReDEM). As shown in
Figure 10, the RSSIs applied to the log-distance path loss model were converted smoothly compared to the RSSIs without the log-distance path loss model. The changes of the RSSIs were also reduced.
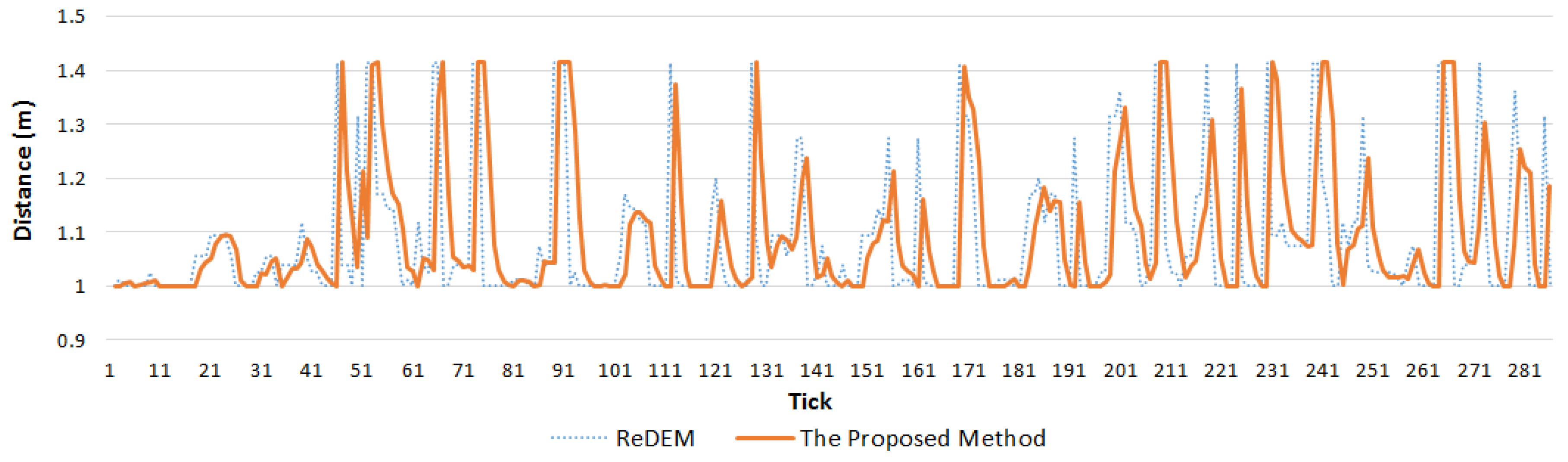
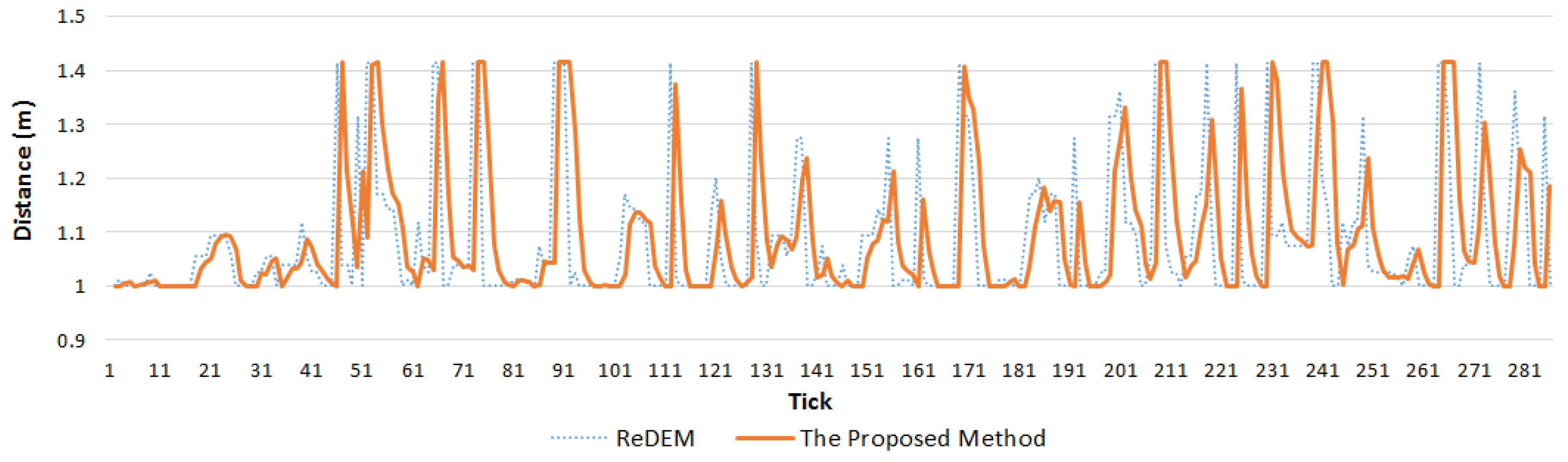
To analyze the accuracy of the proposed method, its results were compared with those of a traditional ReDEM. As shown in
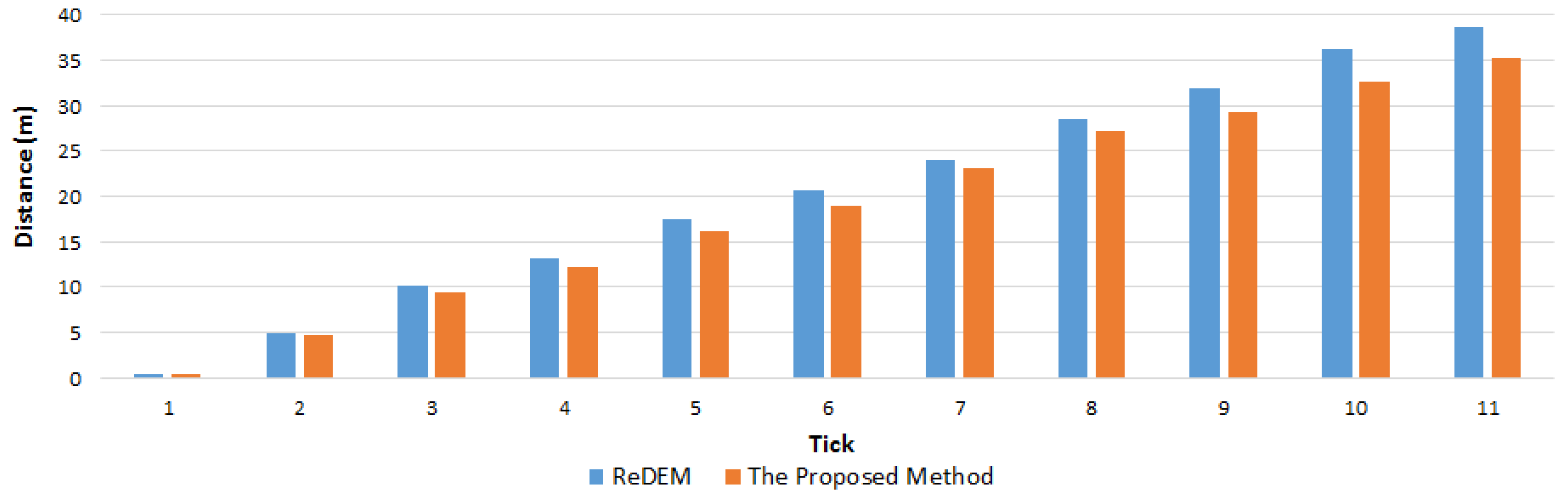
Figure 11, the RSSIs measured by the traditional method were generally higher, although their peaks were lower compared to those measured by the proposed method. In addition, the proposed method was found to produce 9% fewer accumulated errors, as shown in
Figure 12. The proposed method was thus confirmed to be more accurate for distance estimation.
5. Conclusions
Multiple processes are involved in the estimation of distances in an FSC environment, such as noise filtering, RSSI revision, and distance estimation. To increase the accuracy of the estimations, it is necessary to improve the performance of each process. Because the maximum and minimum RSSIs are required in advance to revise the distances, the distance estimation framework proposed in this paper consists of two phases. The offline phase comprises RSSI measurement, log-distance revision, and Kalman filtering, which are used to detect the maximum and minimum signals. The online phase comprises RSSI measurement, log-distance revision, Kalman filtering, and relative distance estimation, which are used to estimate the distances based on the maximum and minimum signals. The proposed distance estimation framework can be used for the identification of indoor locations. The measured RSSIs are converted into signals that are proportional to their real transmission distances using a log-distance path loss model, and Kalman filtering is used to eliminate the effect of signal noise. The relative distances are then calculated by the relative distance estimation method using the maximum and minimum distances. The performance of the Kalman filter in the proposed distance estimation framework was evaluated by comparison with the use of RF-III, and the former was found to produce 8% fewer accumulated errors.
Acknowledgments
This research was supported by the MSIP (Ministry of Science, ICT and Future Planning), Korea, under the ITRC (Information Technology Research Center) support program (IITP-2016-H8501-16-1014) supervised by the IITP (Institute for Information & communications Technology Promotion).
Conflicts of Interest
The author declares no conflict of interest.
References
- Tokuda, H.; Beigl, M; Friday, A.; Brush, A.J.B.; Tobe, Y. RF-based initialisation for inertial pedestrian tracking. Lect. Notes Comput. Sci. 2009, 5538, 238–255. [Google Scholar]
- Zou, H.; Lu, X.; Jiang, H.; Xie, L. A fast and precise indoor localization algorithm based on an online sequential extreme learning machine. Sensors 2015, 15, 1804–1824. [Google Scholar] [CrossRef] [PubMed]
- Lee, S.-G.; Cha, E.-Y.; Sung, Y. Impulse noise filter for beacon-AP signal processing in real time. J. Converg. 2015, 6, 1–7. [Google Scholar] [CrossRef]
- Sung, Y.; Kwak, J. Real-time beacon distance revision method in indoor. Adv. Sci. Technol. Lett. 2015, 106, 69–72. [Google Scholar]
- Kwak, J.; Jang, H.; Sung, Y.; Jeong, Y.-S. Improved location estimation method of trilateration in ubiquitous computing indoor environment. In Advances in Computer Science and Ubiquitous Computing; Springer: Singapore, 2015; Volume 373, pp. 165–169. [Google Scholar]
- Rappaport, T. Wireless Communications Principles and Practices; Prentice-Hall: Upper Saddle River, NJ, USA, 2002. [Google Scholar]
- Sung, Y.; Kwak, J.; Jeong, Y.-S.; Park, J.H. Beacon distance measurement method in indoor ubiquitous computing environment. In Advances in Parallel and Distributed Computing and Ubiquitous Services; Springer: Singapore, 2016; Volume 368, pp. 125–130. [Google Scholar]
- Lee, S.-G.; Sung, Y. Log-distance path loss model-based relative distance estimation method. In Proceedings of the 10th International Conference on Multimedia and Ubiquitous Engineering (MUE2016), Beijing, China, 20–22 April 2016.
- Kwak, J.; Sung, Y. Indoor location-based natural user interface for ubiquitous computing environment. In Advances in Parallel and Distributed Computing and Ubiquitous Services; Springer: Singapore, 2016; Volume 368, pp. 131–136. [Google Scholar]
- Choi, E.; Kim, I. Design of a crowd-sourced fingerprint mapping and localization system. Korea Inf. Proc. Soc. Trans. Softw. Data Eng. 2013, 2, 595–602. [Google Scholar] [CrossRef]
- Choi, E.; Oh, H.; Kim, I. Non-parametric estimation for filtering erroneous crowd-sourced WiFi fingerprints. In Proceedings of the Korea Computer Congress 2013, Jeju, Korea, 15–16 November 2013; pp. 1414–1416.
- Choi, E.; Oh, H.; Kim, I. Simultaneous localization and WiFi fingerprint mapping based on particle filters. J. Korea Inf. Sci. Soc. Softw. Appl. 2013, 40, 211–219. [Google Scholar]
© 2016 by the author; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}