Design for Children’s Playful Learning with Robots


Abstract
:1. Introduction
2. Related Works
3. Methodology
4. Preliminary Research and Requirements
5. Robot Design
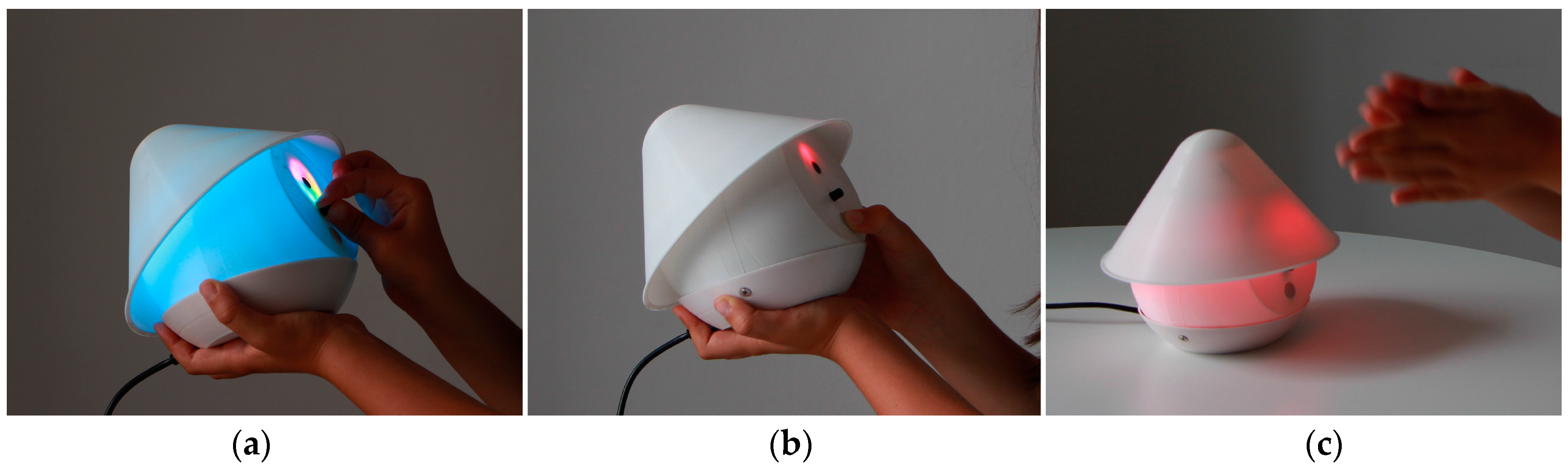
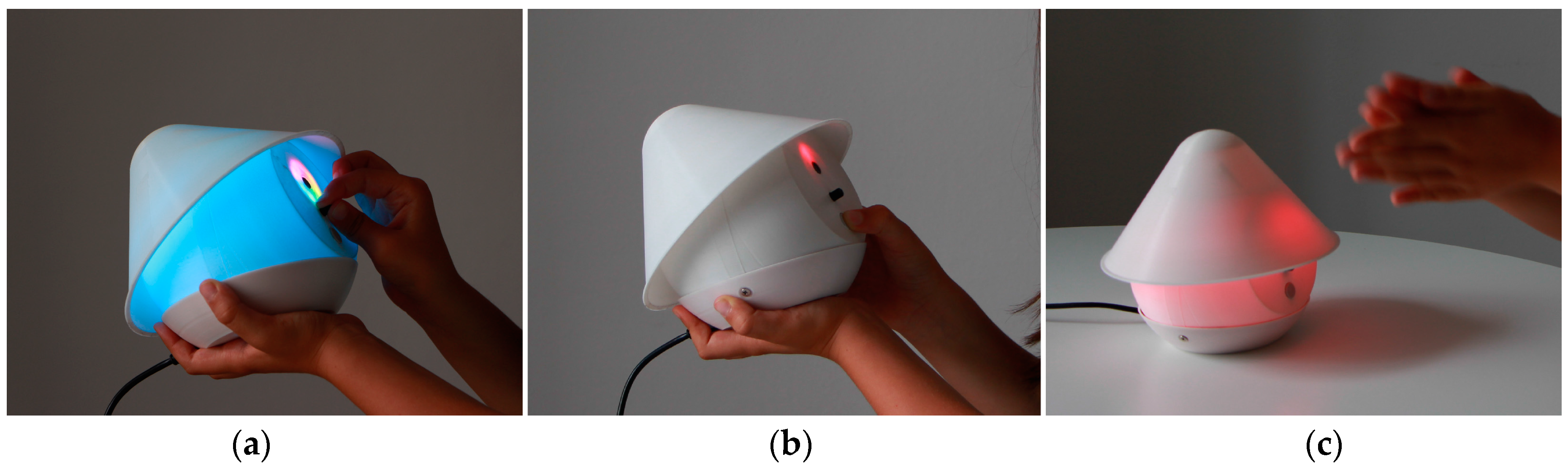
5.1. Shybo
5.2. Supplementary Materials
- Divide the players into groups of 3, so to have 4 groups.
- Each group plays in turns. One turn last 1 min, showed by the hourglass.
- During every turn, each member of the group has to do a different thing. One child reads the card, one takes the object, and the last child moves the pawn on the board. Every turn the children can exchange the role.
- Every card has a coloured circle or a description of colour. The teams have to obtain those colours on the robot by making sounds. The sounds were previously associated with colours by children.
- In one turn each group can do as many cards as it can. Every card done allows moving one step forward on the board.
- If the robot gets scared by the sounds, the team lose the turn, unless the card requires the red colour.
- The team that arrives first at the end of the board wins.
6. Evaluation
6.1. Participants
6.2. Questionnaire
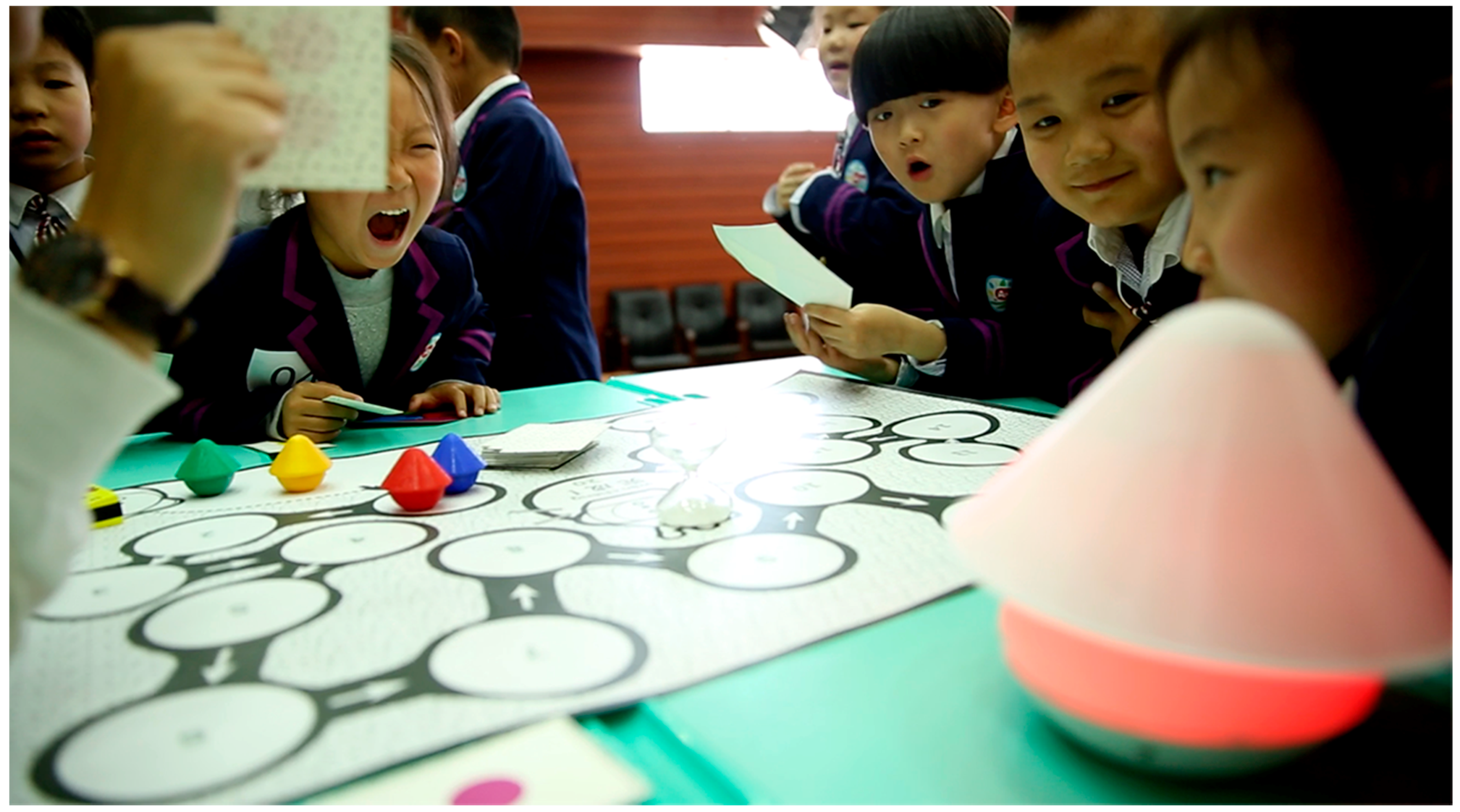
6.3. Playtest
Setting and Materials
7. Results
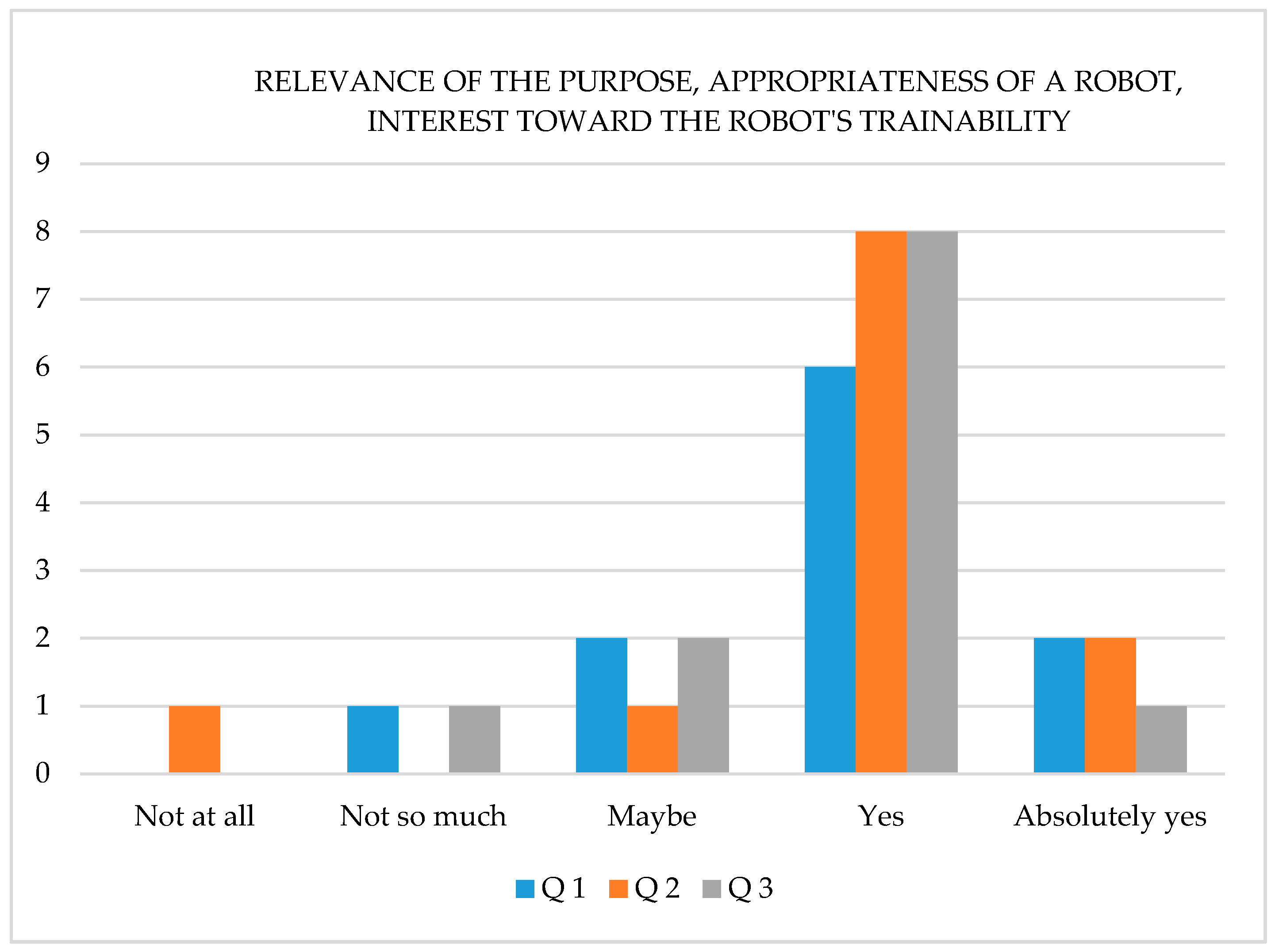
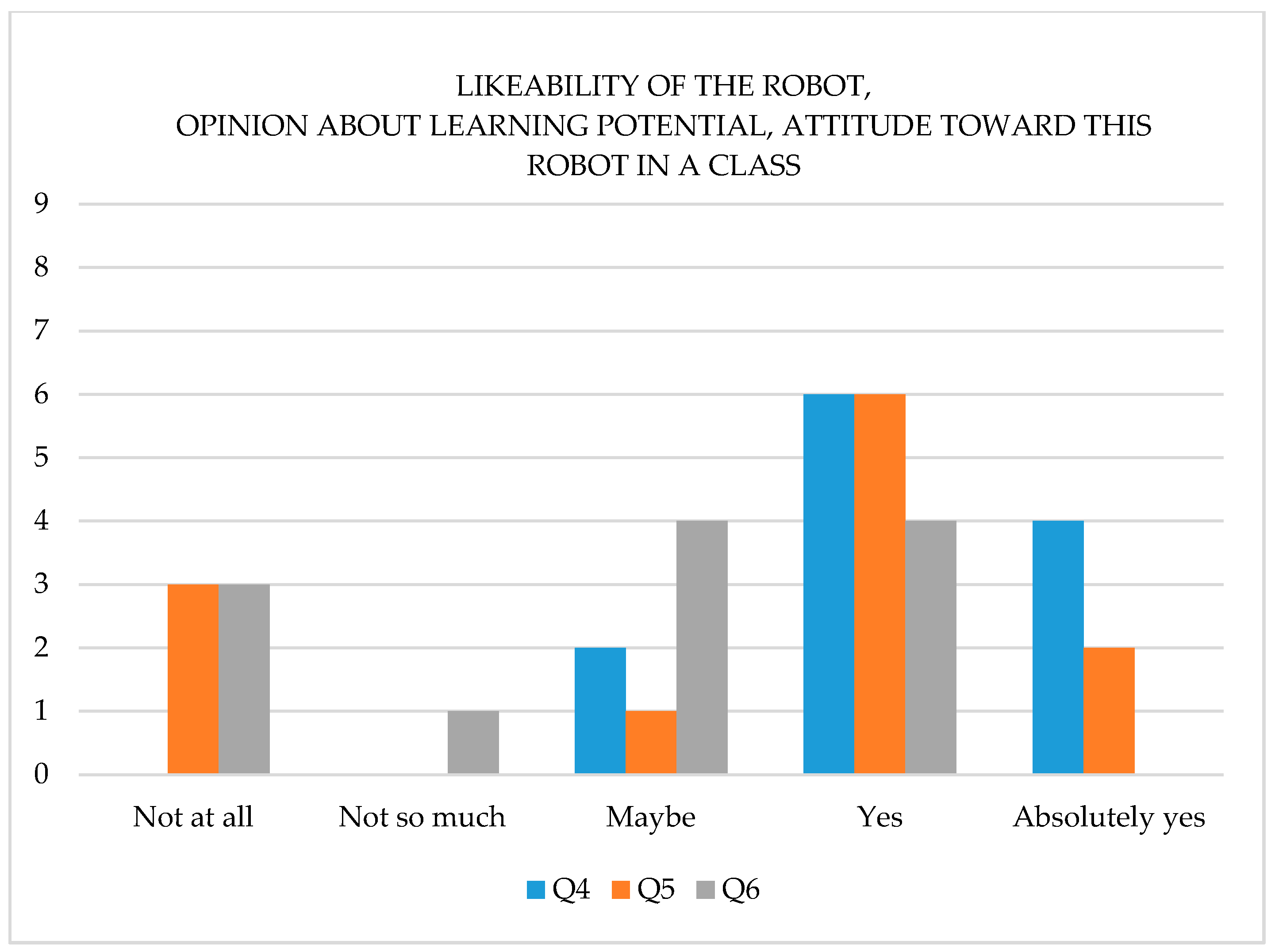
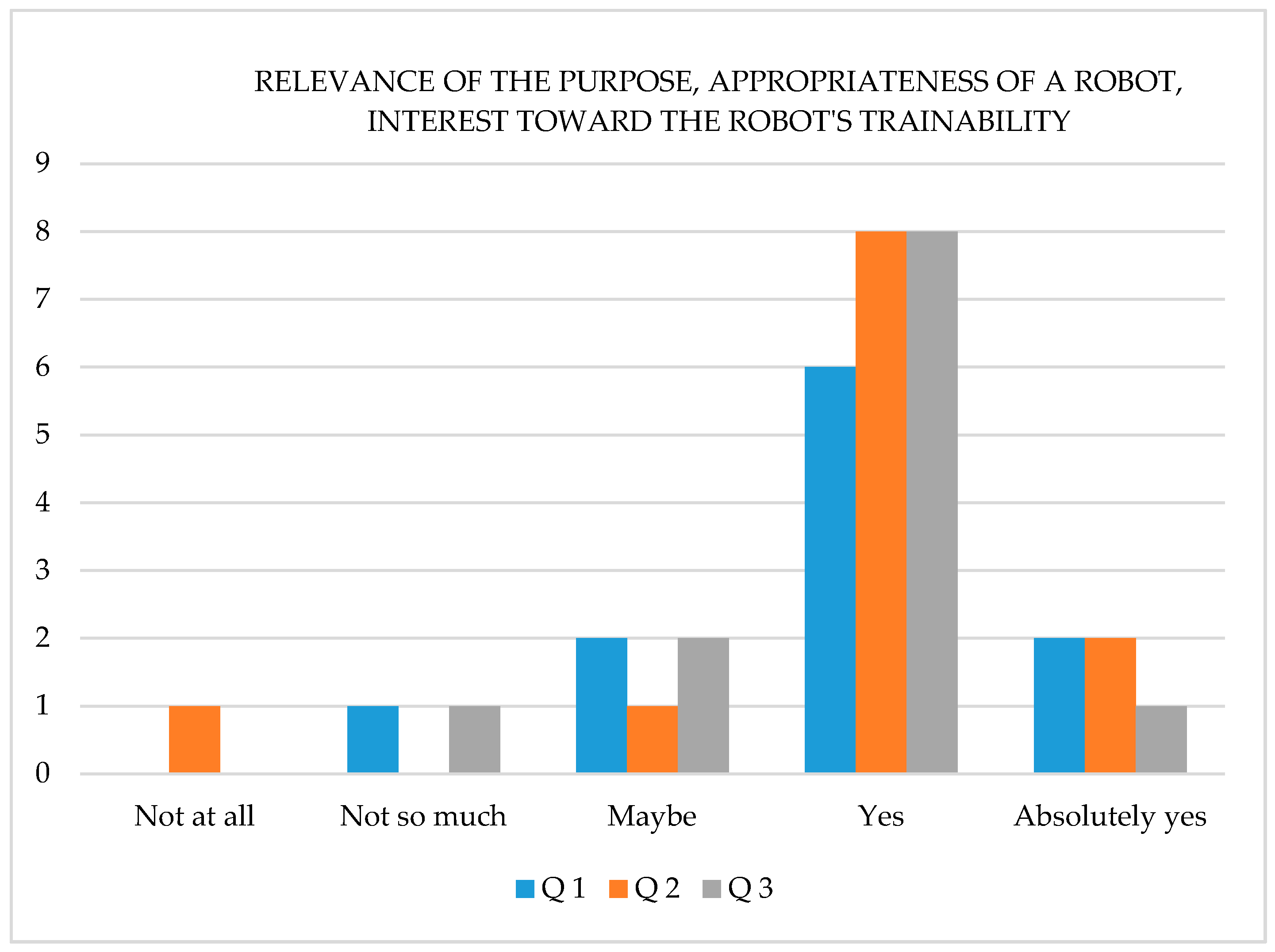
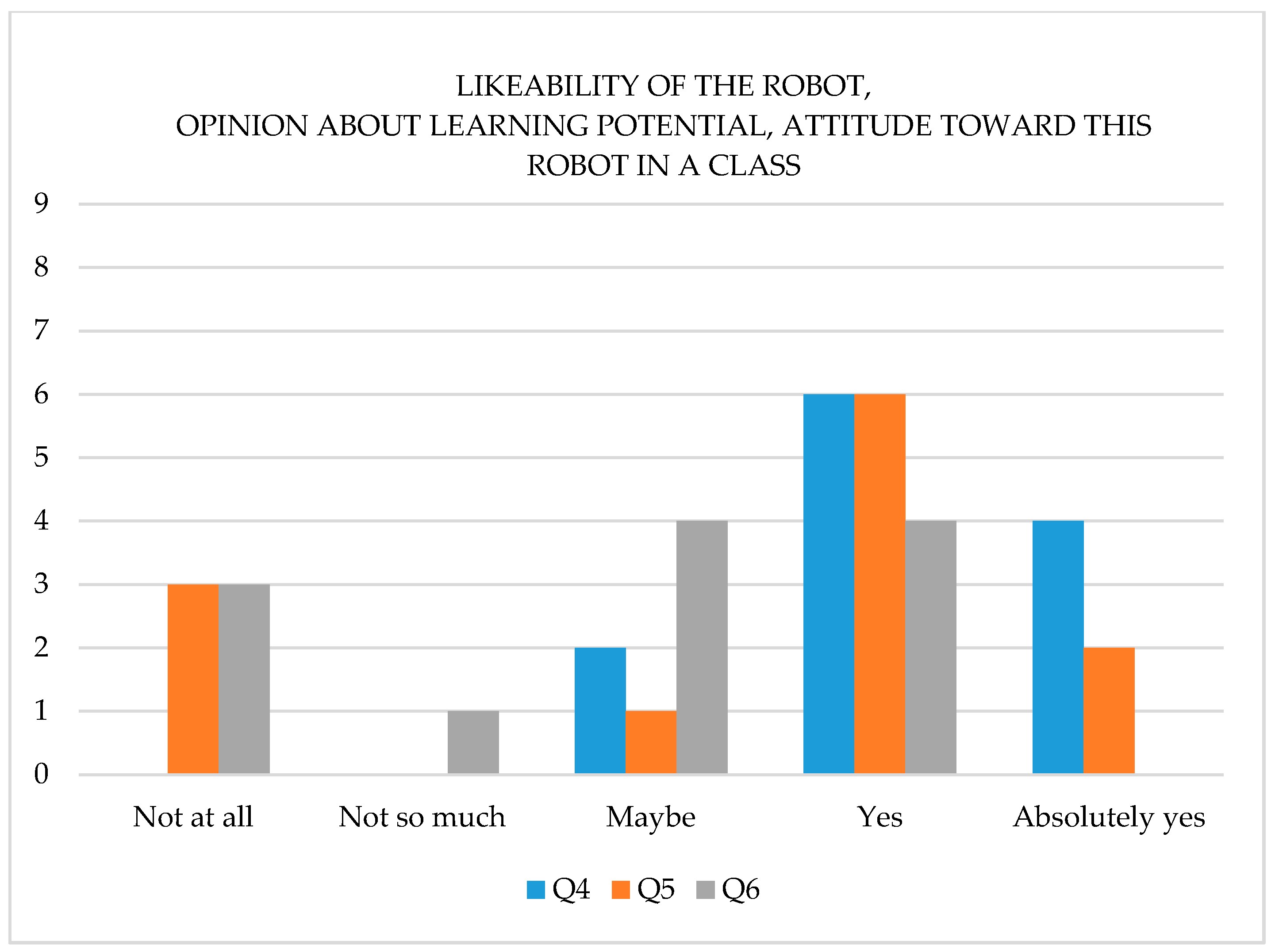
7.1. Questionnaire
7.2. Children’s Activity
7.2.1. Again and Again Table and Difficultometer
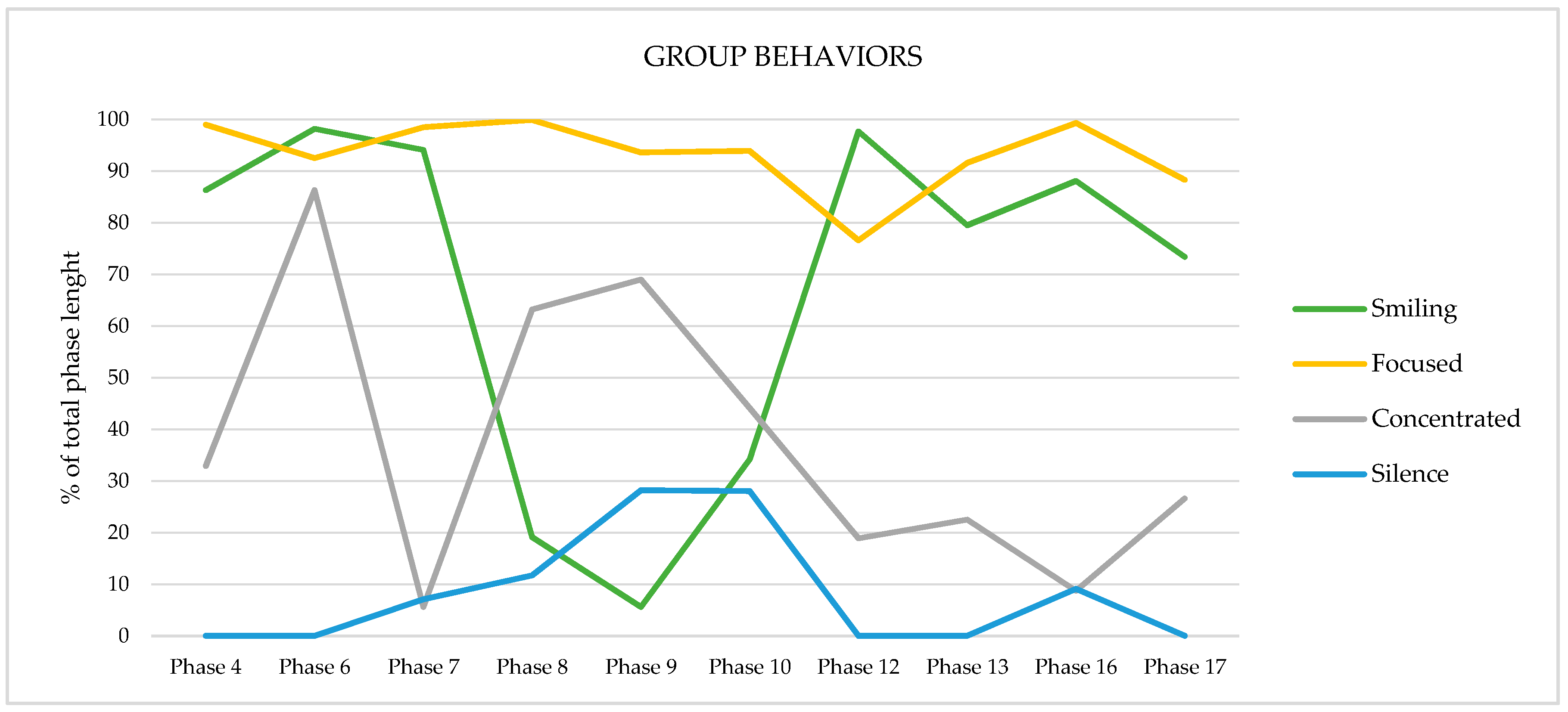
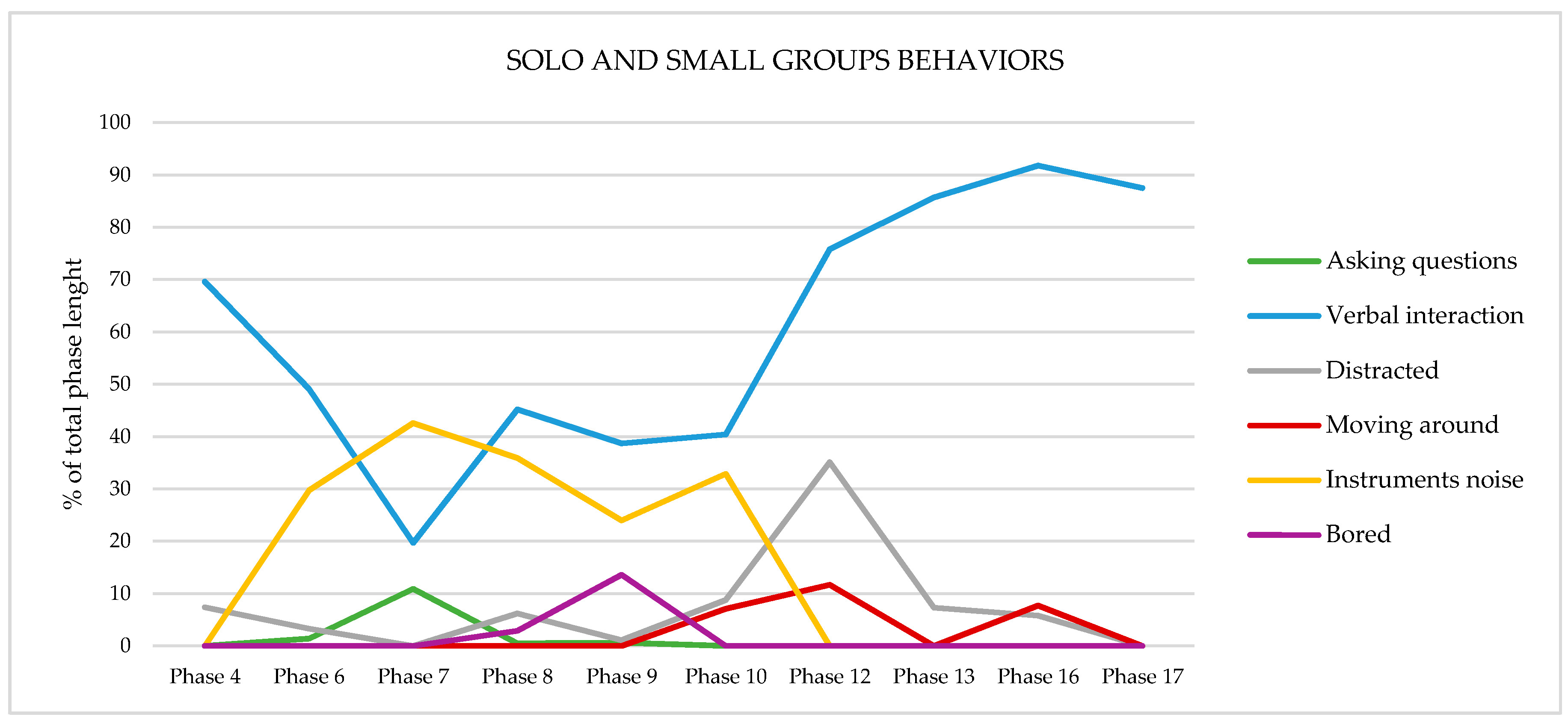
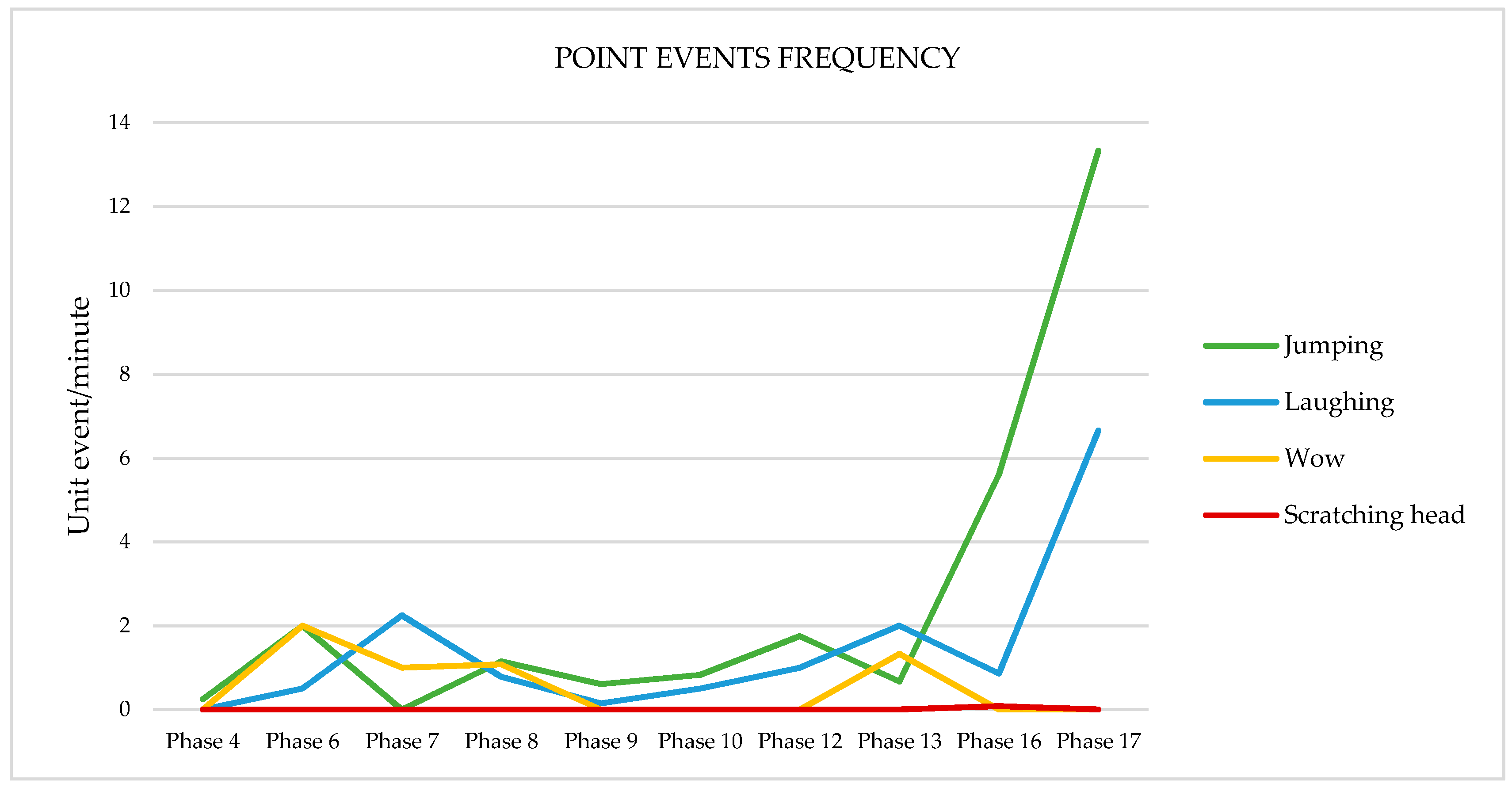
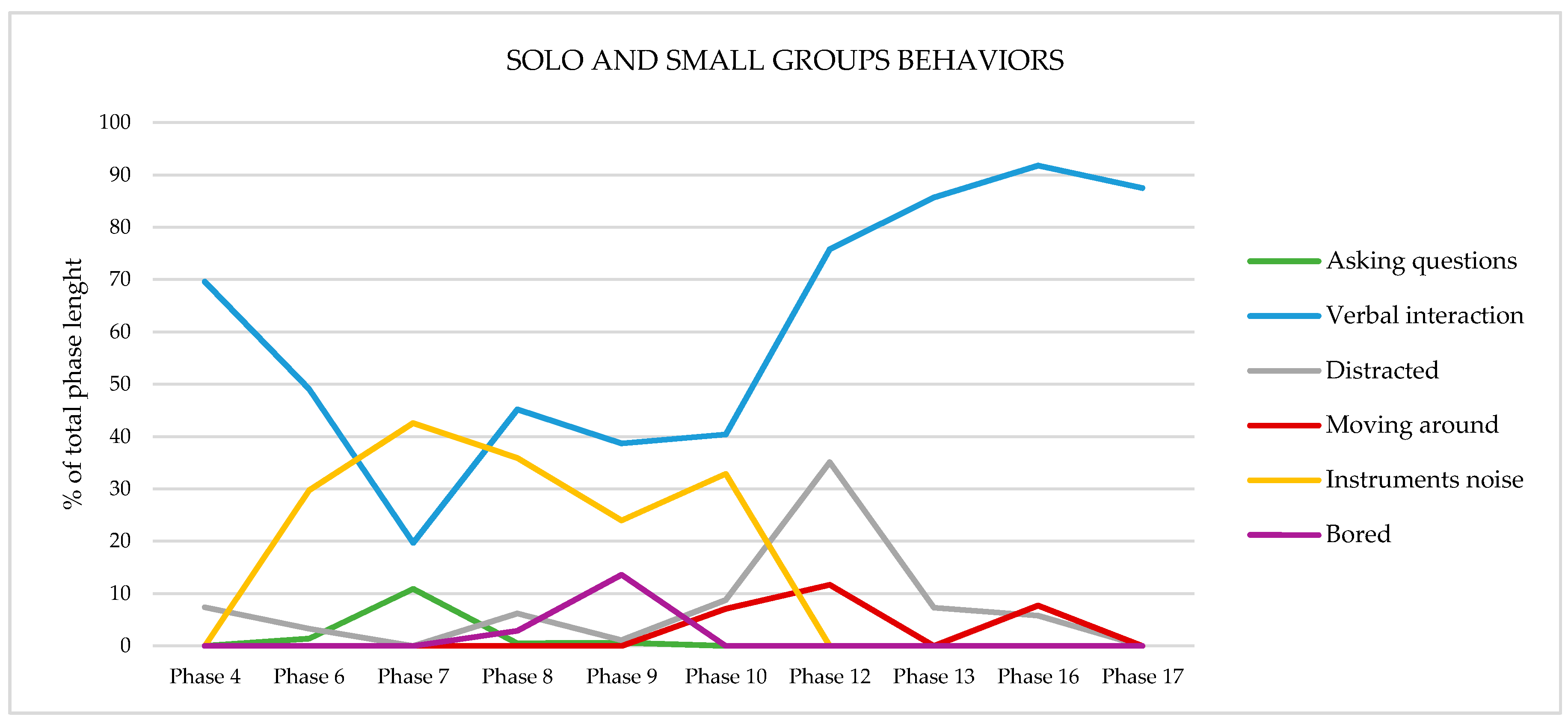
7.2.2. Video-Recording Observation
8. Discussion and Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Mubin, O.; Stevens, C.J.; Shahid, S.; Al Mahmud, A.; Dong, J.J. A review of the applicability of robots in education. J. Technol. Educ. Learn. 2013, 1, 1–7. [Google Scholar] [CrossRef]
- Benitti, F.B.V. Exploring the educational potential of robotics in schools: A systematic review. Comput. Educ. 2012, 58, 978–988. [Google Scholar] [CrossRef]
- Kory, J.; Breazeal, C. Storytelling with robots: Learning companions for preschool children’s language development. In Proceedings of the RO-MAN 23rd IEEE International Symposium Robot and Human Interactive Communication, Edinburgh, UK, 25–29 August 2014; pp. 643–648. [Google Scholar]
- Ackermann, E. Perspective-taking and object construction: Two keys to learning. In Constructionism in Practice: Designing, Thinking, and Learning in a Digital World; Lawrence Erlbaum: Mahwah, NJ, USA, 1996; pp. 25–35. [Google Scholar]
- Piaget, J. Play, Dreams and Imitation in Childhood; Routledge: Abingdon, UK, 2013; Volume 25. [Google Scholar]
- Papert, S. Mindstorms: Children, Computers, and Powerful Ideas; Basic Books, Inc.: New York, NY, USA, 1980. [Google Scholar]
- Ackermann, E.K. Constructing knowledge and transforming the world. In A Learning Zone of One’s Own: Sharing Representations and Flow in Collaborative Learning Environments; IOS Press: Clifton, NJ, USA, 2004; Volume 1, pp. 15–37. [Google Scholar]
- Bettelheim, B. The importance of play. Atlantic 1987, 259, 35–46. [Google Scholar]
- Papert, S. Computer Criticism vs. Technocentric Thinking; Epistemology and Learning Group, MIT Media Laboratory: Boston, MA, USA, 1990. [Google Scholar]
- Malone, T.W.; Lepper, M.R. Making learning fun: A taxonomy of intrinsic motivations for learning. In Aptitude, Learning, and Instruction; Lawrence Erlbaum Associates Publishers: Hillsdale, NJ, USA, 1987; Volume 3, pp. 223–253. [Google Scholar]
- Fisher, K.; Hirsh-Pasek, K.; Golinkoff, R.M.; Singer, D.G.; Berk, L. Playing around in school: Implications for learning and educational policy. In The Oxford Handbook of the Development of Play; Oxford University Press: Oxford, London, UK, 2011. [Google Scholar]
- Resnick, M. Edutainment? No Thanks. I Prefer Playful Learning; Associazione Civita Report on Edutainment; Parents Choice, 2004; Volume 14, pp. 1–4. Available online: http://www.parents-choice.org/article.cfm?art_id=172& (accessed on 17 July 2017).
- Resnick, M. Technologies for lifelong kindergarten. In Educational Technology Research and Development; Springer: New York, NY, USA, 1998; Volume 46, pp. 43–55. [Google Scholar]
- Resnick, M. Computer as paint brush: Technology, play, and the creative society. In Play = Learning: How Play Motivates and Enhances Children’s Cognitive and Social-Emotional Growth; Oxford University Press: Oxford, London, UK, 2006; pp. 192–208. [Google Scholar]
- Martin, F.G. A toolkit for learning: Technology of the MIT LEGO Robot Design Competition. In Proceedings of the Workshop on Mechatronics Education, Stanford University, Stanford, CA, USA, 21–22 July 1994; pp. 57–67. [Google Scholar]
- Resnick, M.; Martin, F.; Sargent, R.; Silverman, B. Programmable bricks: Toys to think with. IBM Syst. J. 1996, 35, 443–452. [Google Scholar] [CrossRef]
- Riedo, F.; Chevalier, M.; Magnenat, S.; Mondada, F. Thymio II, a robot that grows wiser with children. In Proceedings of the 2013 IEEE Workshop on Advanced Robotics and its Social Impacts (ARSO), Tokyo, Japan, 7–9 November 2013; pp. 187–193. [Google Scholar]
- Firth, N. Code generation. New Sci. 2014, 223, 38–41. [Google Scholar] [CrossRef]
- Tanaka, F.; Matsuzoe, S. Children teach a care-receiving robot to promote their learning: Field experiments in a classroom for vocabulary learning. J. Hum.-Robot Interact. 2012, 1. [Google Scholar] [CrossRef]
- Gordon, M.; Rivera, E.; Ackermann, E.; Breazeal, C. Designing a relational social robot toolkit for preschool children to explore computational concepts. In Proceedings of the 14th International Conference on Interaction Design and Children, Medford, MA, USA, 21–25 June 2015; pp. 355–358. [Google Scholar]
- Marti, P.; Iacono, I. Learning through play with a robot companion. In Proceedings of the 11th European Conference for the Advancement of Assistive Technology (AAATE), Maastricht, The Netherlands, 31 August–2 September 2011. [Google Scholar]
- Kronreif, G.; Prazak, B.; Mina, S.; Kornfeld, M.; Meindl, M.; Furst, M. Playrob-robot-assisted playing for children with severe physical disabilities. In Proceedings of the 9th International Conference on Rehabilitation Robotics (ICORR 2005), Chicago, IL, USA, 28 June–1 July 2005; pp. 193–196. [Google Scholar]
- Ackermann, E.K. Playthings that do things: A young kid’s incredibles! In Proceedings of the 2005 Conference on Interaction Design and Children, Boulder, CO, USA, 8–10 June 2005; pp. 1–8. [Google Scholar]
- Frayling, C. Research in Art and Design; Royal College of Art: London, UK, 1993. [Google Scholar]
- Lupetti, M.L.; Germak, C.; Yao, Y.; Gao, J.; Mi, H. Design for Learning Through Play. An Exploratory Study on Chinese Perspective. In Proceedings of the 9th International Conference Held as Part of HCI International 2017 (CCD 2017), Vancouver, BC, Canada, 9–14 July 2017; pp. 565–581. [Google Scholar]
- Gaver, B.; Dunne, T.; Pacenti, E. Design: Cultural probes. Interactions 1999, 6, 21–29. [Google Scholar] [CrossRef]
- Luria, M.; Hoffman, G.; Megidish, B.; Zuckerman, O.; Park, S. Designing Vyo, a robotic Smart Home assistant: Bridging the gap between device and social agent. In Proceedings of the 2016 25th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), New York, NY, USA, 26–31 August 2016; pp. 1019–1025. [Google Scholar]
- Hoffman, G.; Ju, W. Designing robots with movement in mind. J. Hum.-Robot Interact. 2014, 3, 89–122. [Google Scholar] [CrossRef]
- Blow, M.; Dautenhahn, K.; Appleby, A.; Nehaniv, C.L.; Lee, D. The art of designing robot faces: Dimensions for human-robot interaction. In Proceedings of the 1st ACM SIGCHI/SIGART Conference on Human-Robot Interaction, Salt Lake City, UT, USA, 2–3 March 2006; pp. 331–332. [Google Scholar]
- Marti, P. The Temptation of Mimicry. Interaction Studies; 15:2; John Benjamin Publishing Company: Amsterdam, The Netherlands, 2014; pp. 184–189. [Google Scholar]
- Mori, M. The uncanny valley. Energy 1970, 7, 33–35. [Google Scholar]
- Hartson, R. Cognitive, physical, sensory, and functional affordances in interaction design. Behav. Inf. Technol. 2003, 22, 315–338. [Google Scholar] [CrossRef]
- Bartneck, C.; Kulić, D.; Croft, E.; Zoghbi, S. Measurement instruments for the anthropomorphism, animacy, likeability, perceived intelligence, and perceived safety of robots. Int. J. Soc. Robot. 2009, 1, 71–81. [Google Scholar] [CrossRef]
- Read, J.C.; MacFarlane, S. Using the fun toolkit and other survey methods to gather opinions in child computer interaction. In Proceedings of the 2006 Conference on Interaction Design and Children, Tampere, Finland, 7–9 June 2006; pp. 81–88. [Google Scholar]
- Mandryk, R.L.; Atkins, M.S.; Inkpen, K.M. A continuous and objective evaluation of emotional experience with interactive play environments. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems, Montreal, QC, Canada, 22–27 April 2006; pp. 1027–1036. [Google Scholar]
- Kiesler, S.; Hinds, P. Introduction to this special issue on human-robot interaction. Hum.-Comput. Interact. 2004, 19, 1–8. [Google Scholar] [CrossRef]
- Weiss, A.; Bernhaupt, R.; Lankes, M.; Tscheligi, M. The USUS evaluation framework for human-robot interaction. In Proceedings of the AISB2009, Symposium on New Frontiers in Human-Robot Interaction, Edinburgh, UK, 6–9 April 2009; Volume 4, pp. 11–26. [Google Scholar]
- Davis, F.D. Perceived usefulness, perceived ease of use, and user acceptance of information technology. MIS Q. 1989, 13, 319–340. [Google Scholar] [CrossRef]
- Rogers, E.M. Diffusion of Innovation Theory; The Free Press: New York, NY, USA, 1995. [Google Scholar]
- Mumm, J.; Mutlu, B. Human-robot proxemics: Physical and psychological distancing in human-robot interaction. In Proceedings of the 6th International Conference on Human-Robot Interaction, Lausanne, Switzerland, 6–9 March 2011; pp. 331–338. [Google Scholar]
- Castro-González, Á.; Admoni, H.; Scassellati, B. Effects of form and motion on judgments of social robots׳ animacy, likability, trustworthiness and unpleasantness. Int. J. Hum.-Comput. Stud. 2016, 90, 27–38. [Google Scholar] [CrossRef]
- Xie, L.; Antle, A.N.; Motamedi, N. Are tangibles more fun? Comparing children’s enjoyment and engagement using physical, graphical and tangible user interfaces. In Proceedings of the 2nd International Conference on Tangible and Embedded Interaction, Bonn, Germany, 18–21 February 2008; pp. 191–198. [Google Scholar]
- Salomon, G.; Globerson, T. When teams do not function the way they ought to. Int. J. Educ. Res. 1989, 13, 89–99. [Google Scholar] [CrossRef]
- Baxter, P.; Kennedy, J.; Senft, E.; Lemaignan, S.; Belpaeme, T. From characterising three years of HRI to methodology and reporting recommendations. In Proceedings of the Eleventh ACM/IEEE International Conference on Human Robot Interaction, Christchurch, New Zealand, 7–10 March 2016; pp. 391–398. [Google Scholar]
- Ros, R.; Nalin, M.; Wood, R.; Baxter, P.; Looije, R.; Demiris, Y.; Pozzi, C. Child-robot interaction in the wild: Advice to the aspiring experimenter. In Proceedings of the 13th International Conference on Multimodal Interfaces, Alicante, Spain, 14–18 November 2011; pp. 335–342. [Google Scholar]
- Zaga, C.; de Vries, R.A.; Li, J.; Truong, K.P.; Evers, V. A Simple Nod of the Head: The Effect of Minimal Robot Movements on Children’s Perception of a Low-Anthropomorphic Robot. In Proceedings of the 2017 CHI Conference on Human Factors in Computing Systems, Denver, CO, USA, 6–11 May 2017; pp. 336–341. [Google Scholar]
- Friard, O.; Gamba, M. BORIS: A free, versatile open-source event-logging software for video/audio coding and live observations. Methods Ecol. Evol. 2016, 7, 1325–1330. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Negative Descriptors | Positive Descriptors | Descriptor’s Category | Attribute |
|---|---|---|---|
| Dislike | Like | Appeal | Likeability |
| Awful | Nice | Beauty | Likeability |
| Unfriendly | Friendly | Friendliness | Likeability |
| Complex | Simple | Simplicity | Suitability |
| Inappropriate for children | Appropriate for children | Appropriateness | Suitability |
| Unsafe | Safe | Safety | Suitability |
| Step | Video Sequence | Description |
|---|---|---|
| 1 | 00:00/00:01 (video 1) | Children are welcomed in the conference room of the school |
| 2 | 00:01/00:35 (video 1) | Each child is invited to take one musical instrument from the front table |
| 3 | 00:35/01:55 (video 1) | One child at the time is invited to play his/her musical instrument while the other listen |
| 4 | 01:55/06:01 (video 1) | Children are invited to find sounds similar to the one of their instrument and to make groups of two or three children |
| 5 | 06:01/08:18 (video 1) | Each group play the instruments again and select a colour, picking a coloured paper card |
| 6 | 08:18/11:30 (video 1) | The tutor shows a short video that illustrates the functioning of Shybo |
| 7 | 11:30/15:20 (video 1) | The tutor introduces Shybo to children |
| 8 | 15:20/21:55 (video 1) | The tutor demonstrates live how to train Shybo |
| 9 | 00:00/13:00 (video 2) | Each group, one by one, is invited to train Shybo by recording sounds and associating them with colours. During this action one child manage Shybo while another plays an instrument |
| 10 | 13:00/18:58 (video 2) | After each group trained Shybo, the tutor switches Shybo in play mode and ask for children to play the instrument again. If the robot lights up in the colours associated during the training, it is working |
| 11 | 18:58/21:56 (video 2) | Children are invited to leave the instruments on the front table, where they found them |
| 12 | 00:00/04:17 (video 3) | The tutor introduces to children a small paper board of colours and explains briefly what are primary, secondary and complementary colours. She also asks questions to verify that children are understanding |
| 13 | 04:17/05:51 (video 3) | The tutor introduces a board game that can be played with Shybo. She also explains the rules of the game, especially regarding the game cards and how to move ahead on the table |
| 14 | 05:51/13:48 (video 3) | Children are divided randomly into four groups, and each group receive a pawn |
| 15 | 13:48/16:31 (video 3) | The game is set up on the table |
| 16 | 16:31/21:59 (video 3) | The game starts |
| 17 | 00:00/20:10 (video 4) | The game goes on |
| 18 | 20:10/21:57 (video 4) | The game ends when a group arrive at the last box of the board game |
| Attribute | Descriptor’s Category | M | SD |
|---|---|---|---|
| Likeability | Appeal | 4.42 | 0.79 |
| Beauty | 4.42 | 0.99 | |
| Friendliness | 4.67 | 0.65 | |
| Suitability | Simplicity | 4.5 | 0.8 |
| Appropriateness | 5 | 0 | |
| Safety | 4.42 | 0.79 |
| Parent’s Number | Comment |
|---|---|
| 1 | This game can improve children’s observation and reaction ability |
| 2 | I really agree that kids can study something at play and all of kids would like to play with Shybo |
| 4 | Really like those type of games (game with rules) |
| 5 | Its really good for introvert children |
| 7 | I hope there are more chance for kids to attend this activity |
| 9 | Half of the results with the double of effort, and students should study basic classroom knowledge |
| 11 | Good toys and Shybo need to keep on improving and add the anti-interference ability, if not it is just suitable for home play |
| Phase | M | SD |
|---|---|---|
| Play musical instruments, create groups of similar sounds | 1.17 | 0.58 |
| Deciding a colour to associate with the sounds of the group | 1.5 | 1.17 |
| Train the robot by making sounds | 2.17 | 1.46 |
| Playing the game | 2.83 | 1.64 |
| Name | Event Type | Description | Reference Sample | Valence |
|---|---|---|---|---|
| Jumping | Point event | At least one child is jumping in a joyful and excited way. | At least one | Positive |
| Smiling | State event | Children are overall smiling, there is a joyful atmosphere. | Group behaviour | Positive |
| Laughing | Point event | At least one child is audibly laughing. | At least one | Positive |
| Wow | Point event | At least one child express surprise by saying “wooow”. | At least one | Positive |
| Focused | State event | Children are overall focused on the activity, they look at it, stay close to the tutor A and respond promptly. | Group behaviour | Positive |
| Concentrated | State event | Children have a serious and concentrated face while following the activity. | Group behaviour | Positive |
| Asking questions | State event | At least one child ask questions related to the activity. | At least one | Positive |
| Silence | State event | When required by the activity, children keep silence. | Group behaviour | Positive |
| Verbal interaction | State event | Children are overall discussing, answering tutor’s questions and commenting. | Group behaviour | Positive |
| Distracted | State event | At least one child is not focused on the activity, look at something else. | At least one | Negative |
| Moving around | State event | At least one child is not focused on the activity and move away from the tutor’s position. | At least one | Negative |
| Instruments noise | State event | At least one child plays instruments while it is not required by the activity. | At least one | Negative |
| Scratching head | Point event | At least one child is scratching its head because he/she does not know what to do. | At least one | Negative |
| Bored | State event | At least one child is low reactive, the face is serious and the body is relaxed. | At least one | Negative |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lupetti, M.L.; Yao, Y.; Mi, H.; Germak, C. Design for Children’s Playful Learning with Robots. Future Internet 2017, 9, 52. https://doi.org/10.3390/fi9030052
Lupetti ML, Yao Y, Mi H, Germak C. Design for Children’s Playful Learning with Robots. Future Internet. 2017; 9(3):52. https://doi.org/10.3390/fi9030052
Chicago/Turabian StyleLupetti, Maria Luce, Yuan Yao, Haipeng Mi, and Claudio Germak. 2017. "Design for Children’s Playful Learning with Robots" Future Internet 9, no. 3: 52. https://doi.org/10.3390/fi9030052
APA StyleLupetti, M. L., Yao, Y., Mi, H., & Germak, C. (2017). Design for Children’s Playful Learning with Robots. Future Internet, 9(3), 52. https://doi.org/10.3390/fi9030052