
Accelerated Model Predictive Control for Electric Vehicle Integrated Microgrid Energy Management: A Hybrid Robust and Stochastic Approach

Abstract
:1. Introduction
2. Motivation
2.1. Related Works
2.2. Novel Contributions
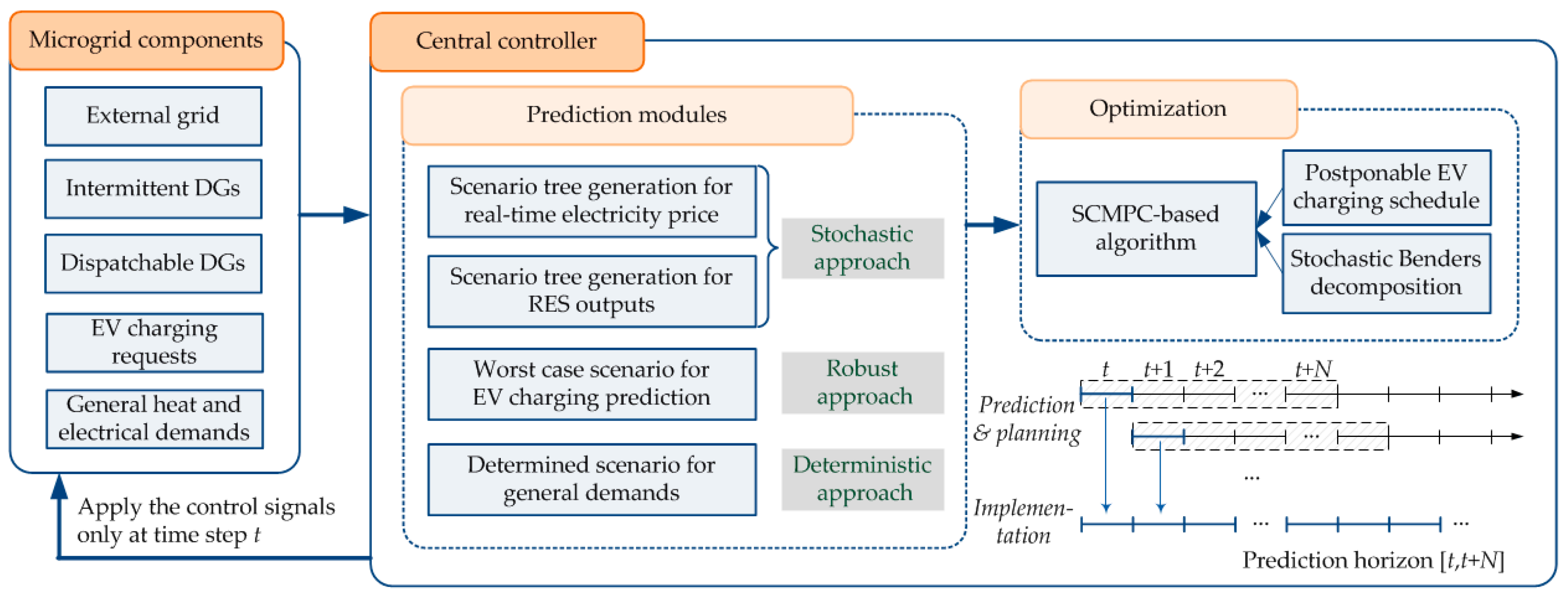
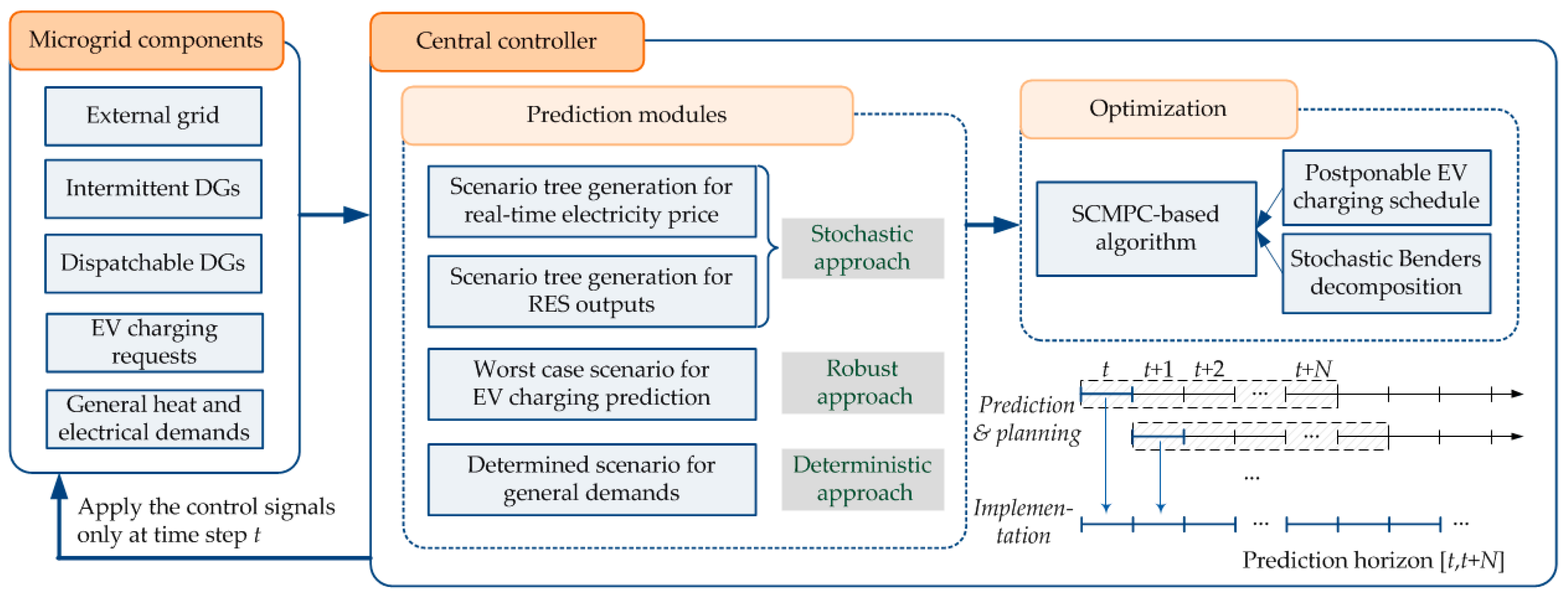
3. A Hybrid Stochastic and Robust MPC Approach for Energy Management
3.1. Structure Model with Operation Constraints
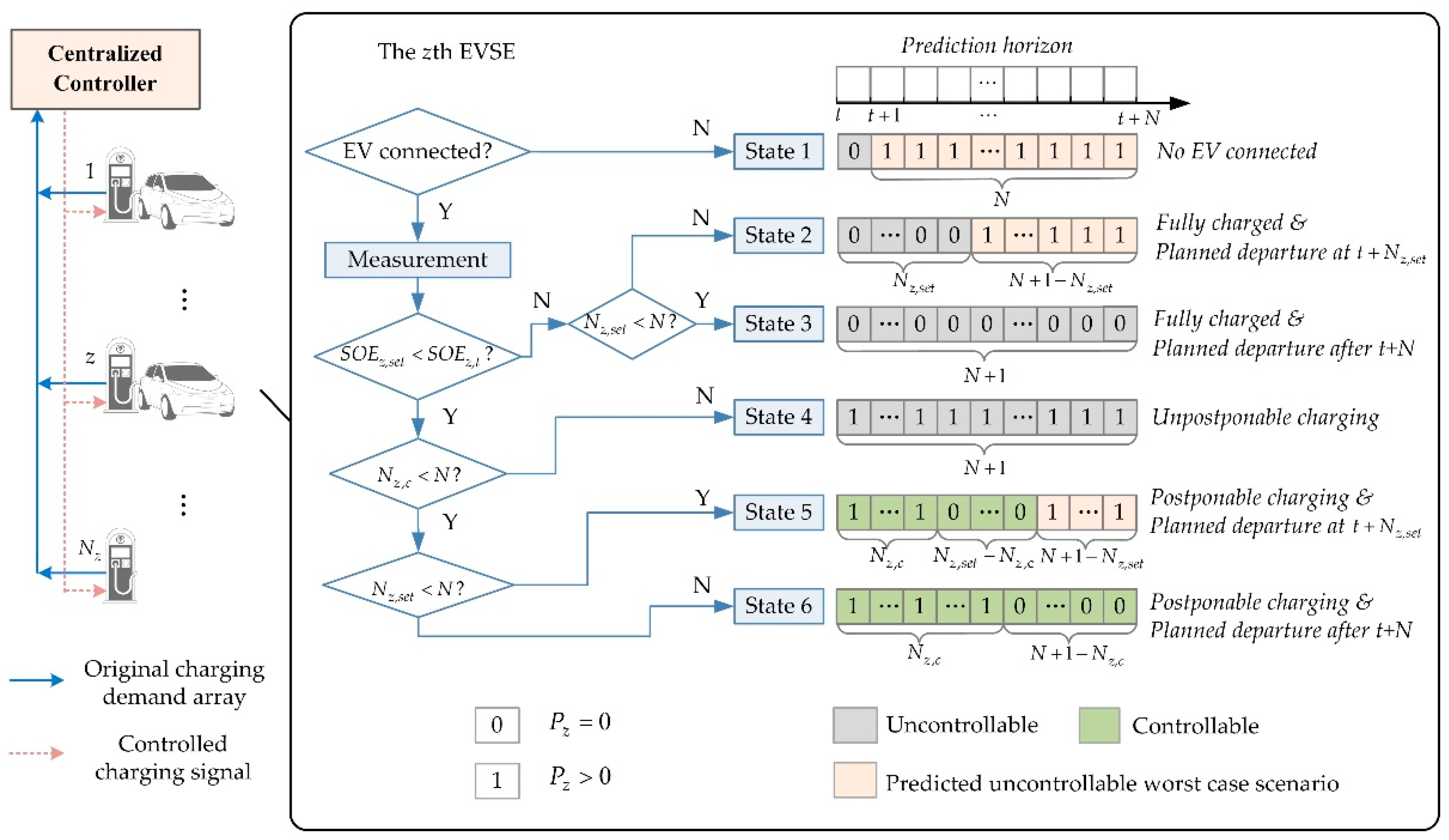
3.2. Robust Approach for EV Charging with Demand-Side Management
3.2.1. Robust Approach for EV Charging Uncertainties
3.2.2. Demand-Side Management for EV Charging
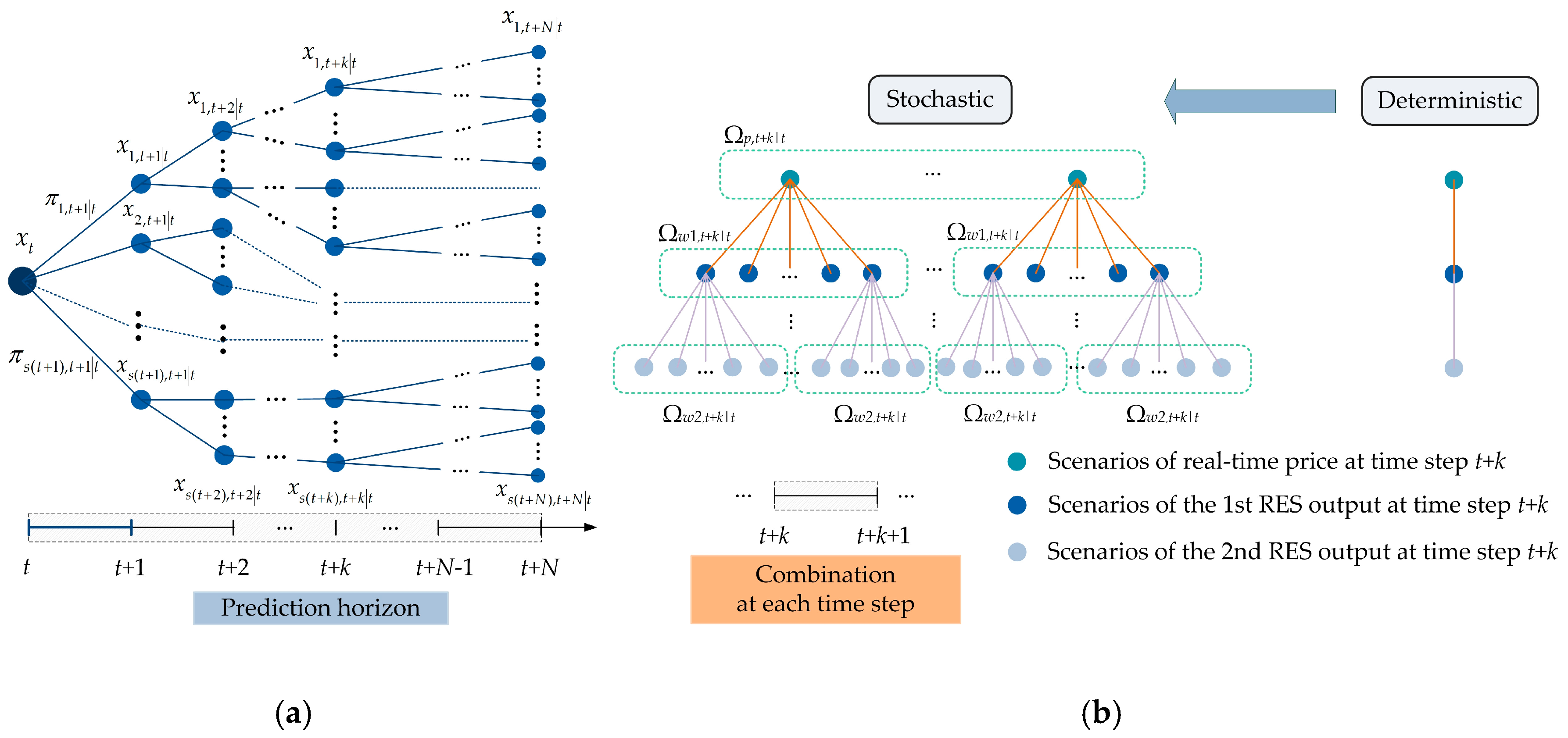
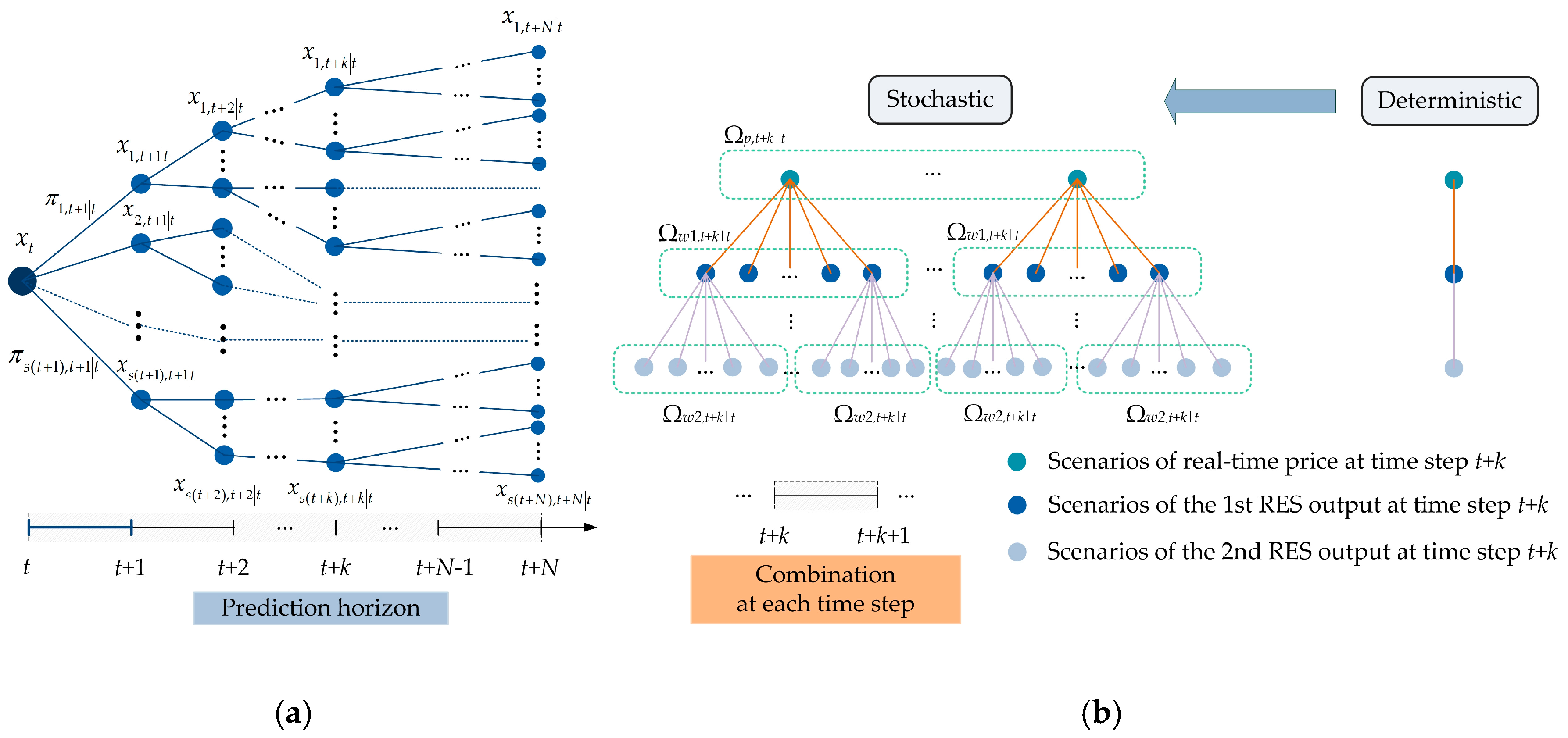
3.3. Stochastic Approach for Uncontrollable Inputs
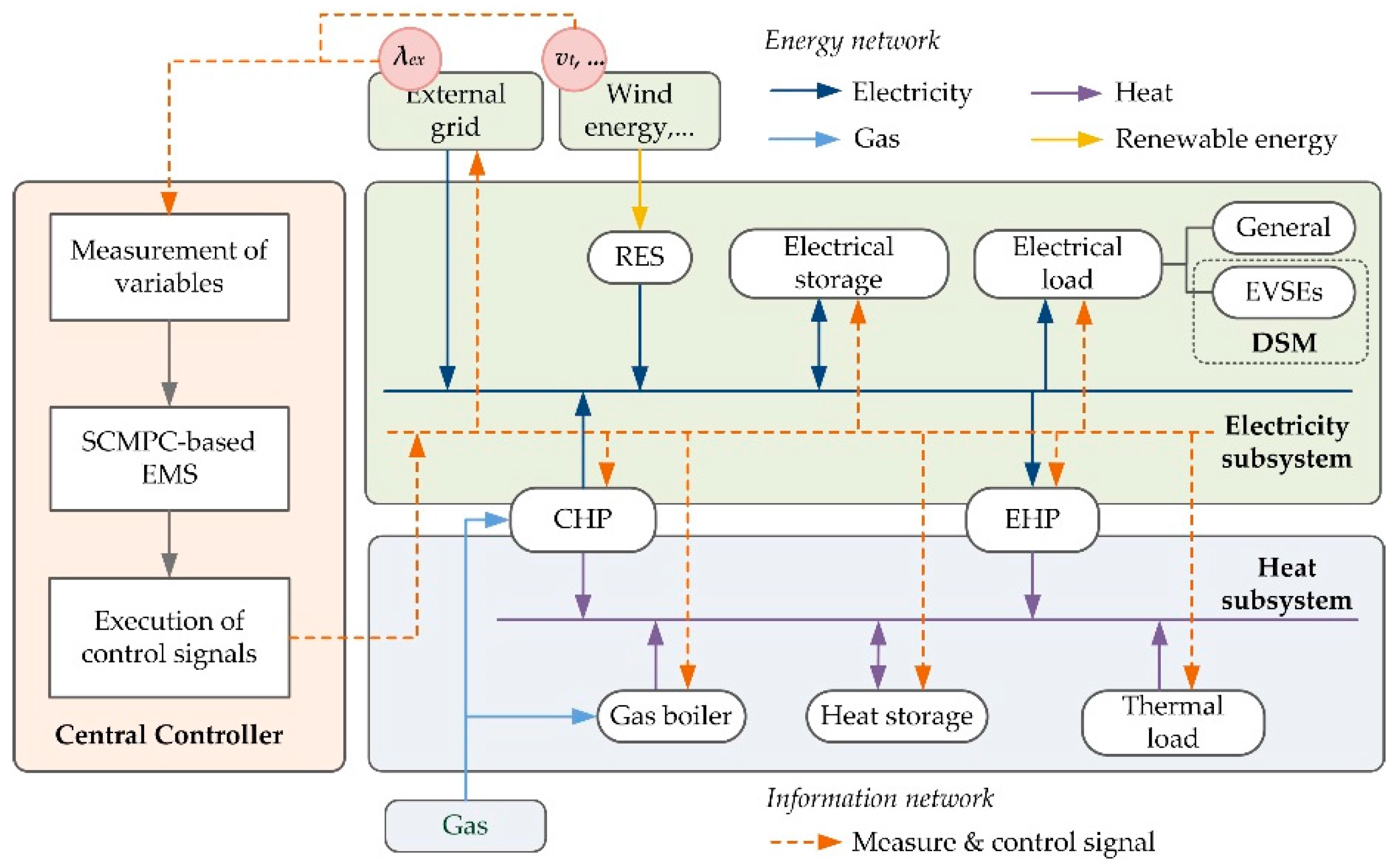
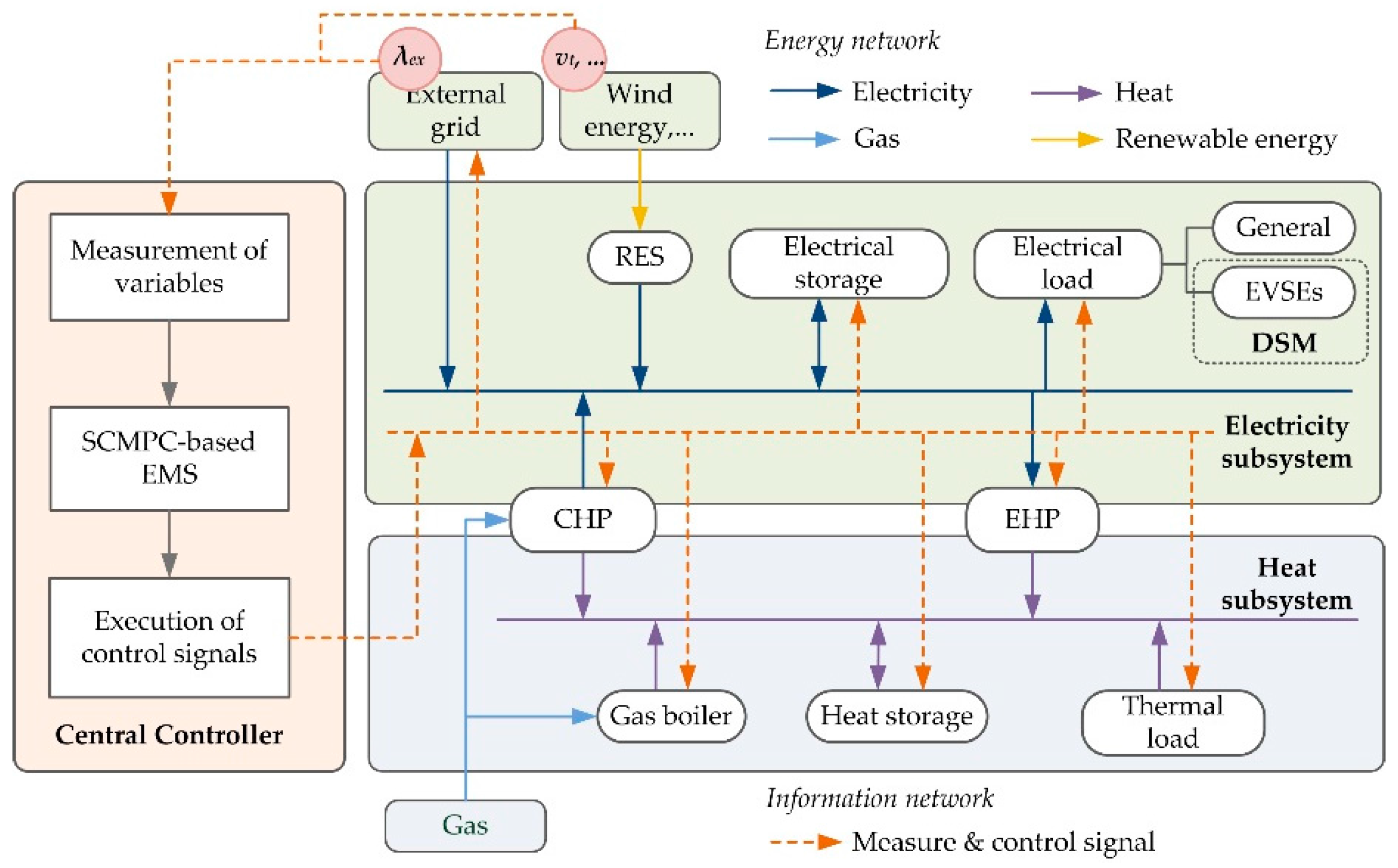
4. Model Formulation for a Combined Heat and Power Microgrid
4.1. Combined Heat and Power Microgrid Model Description
- The microgrid is generally a price-taker in the market since the upper size of a microgrid is generally limited to a few mega volt-amperes (MVAs);
- The optimization is based on economic performance, and the general assumption is that voltage and frequency stability control are not considered on this level;
- The connection between the microgrid and external grid is unconstrained, and thus the output of the installed DGs can be fully absorbed to increase the revenue of the microgrid;
- Signal delays and transmission losses are not considered.
4.2. Implementation of the Energy Management Objective Function
4.3. Benders Decomposition
| Algorithm 1. Stochastic BD |
| At each time step t do Initialize μ = 1, UB = +∞, LB = −∞, θ = 0 For k = 1 to N Set μ = 0, do Solve master problem in Equation (13) and determine a trial solution Xμ,g,t+k|t Update the value for LB Solve all sub-problems in Equation (14) with trial solution Xμ,g,t+k|t Update the value for UB if LB/UB > δ then Add the new optimality cut θ associated with iteration μ to the master problem Set μ = μ + 1, and repeat the solution procedure else an optimal solution is achieved, and execute the control signals at time step t end for |
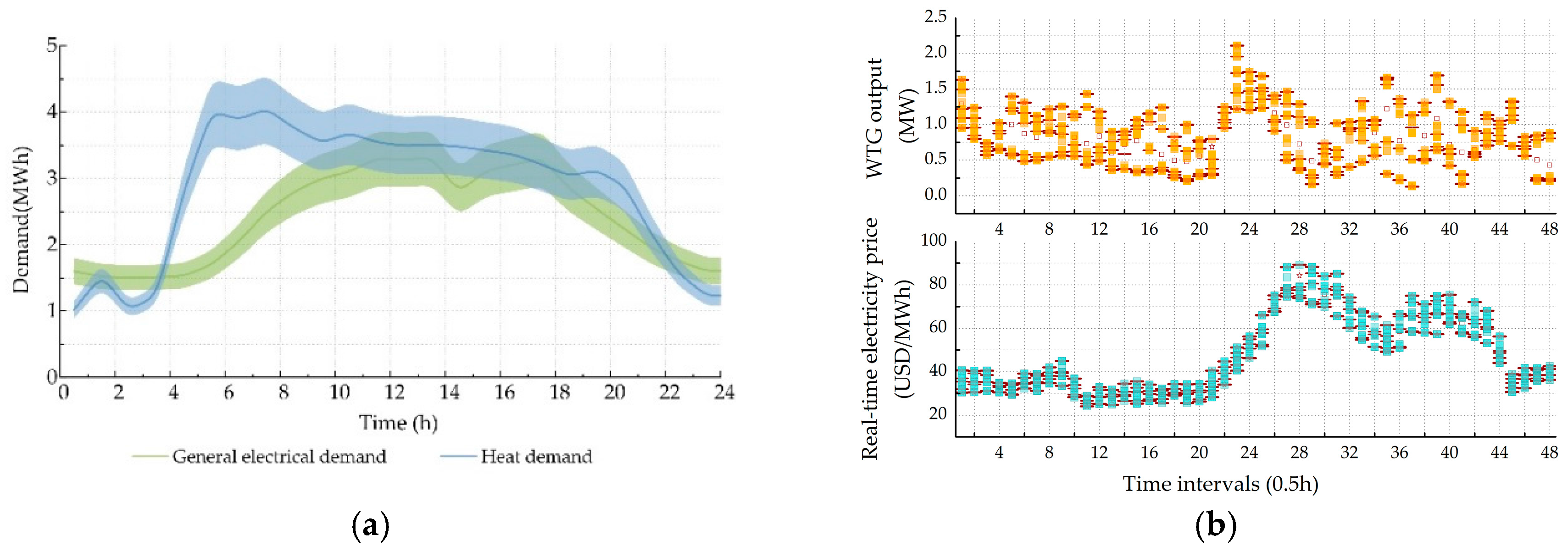
5. Case Study
5.1. Numerical Specifications
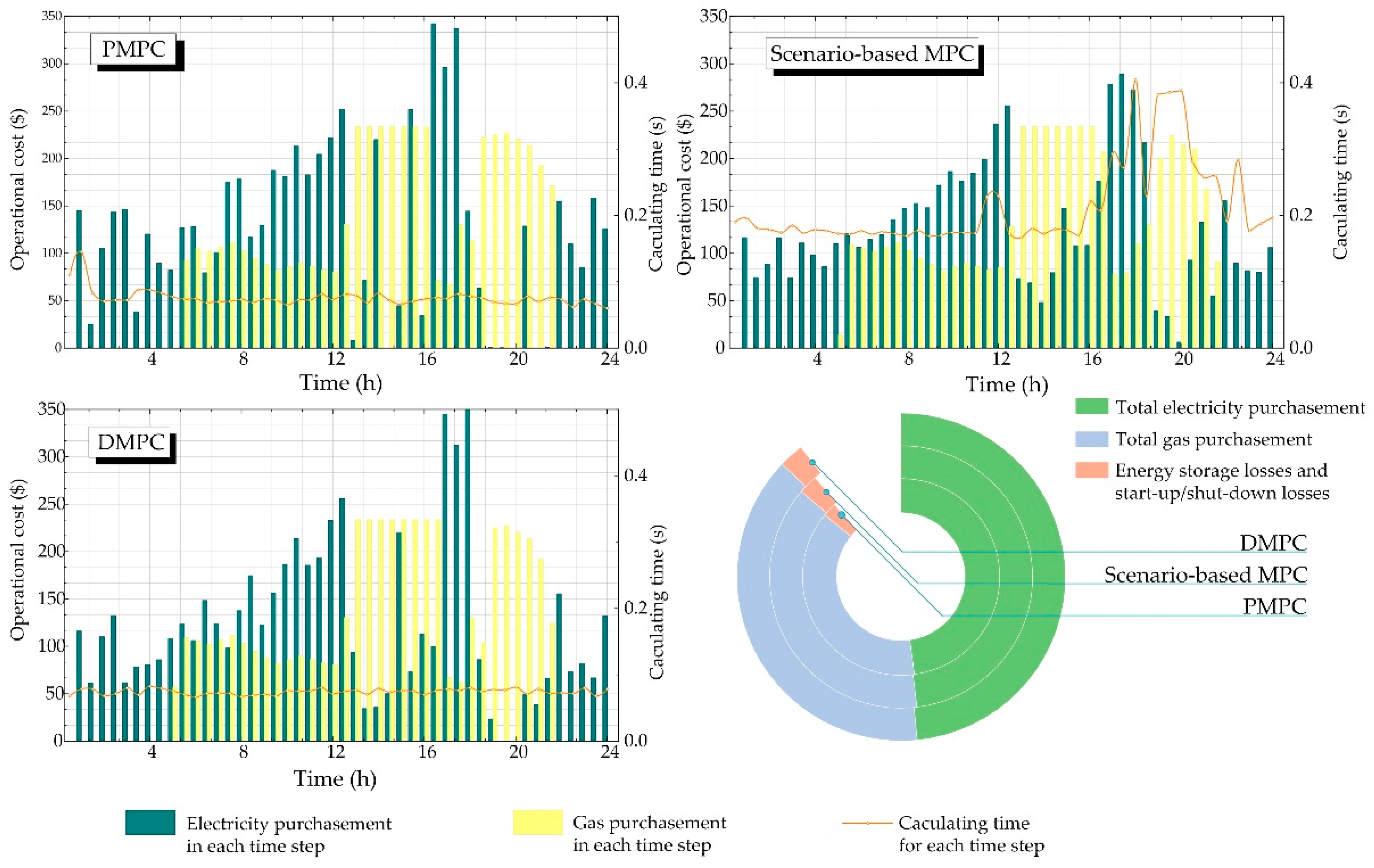
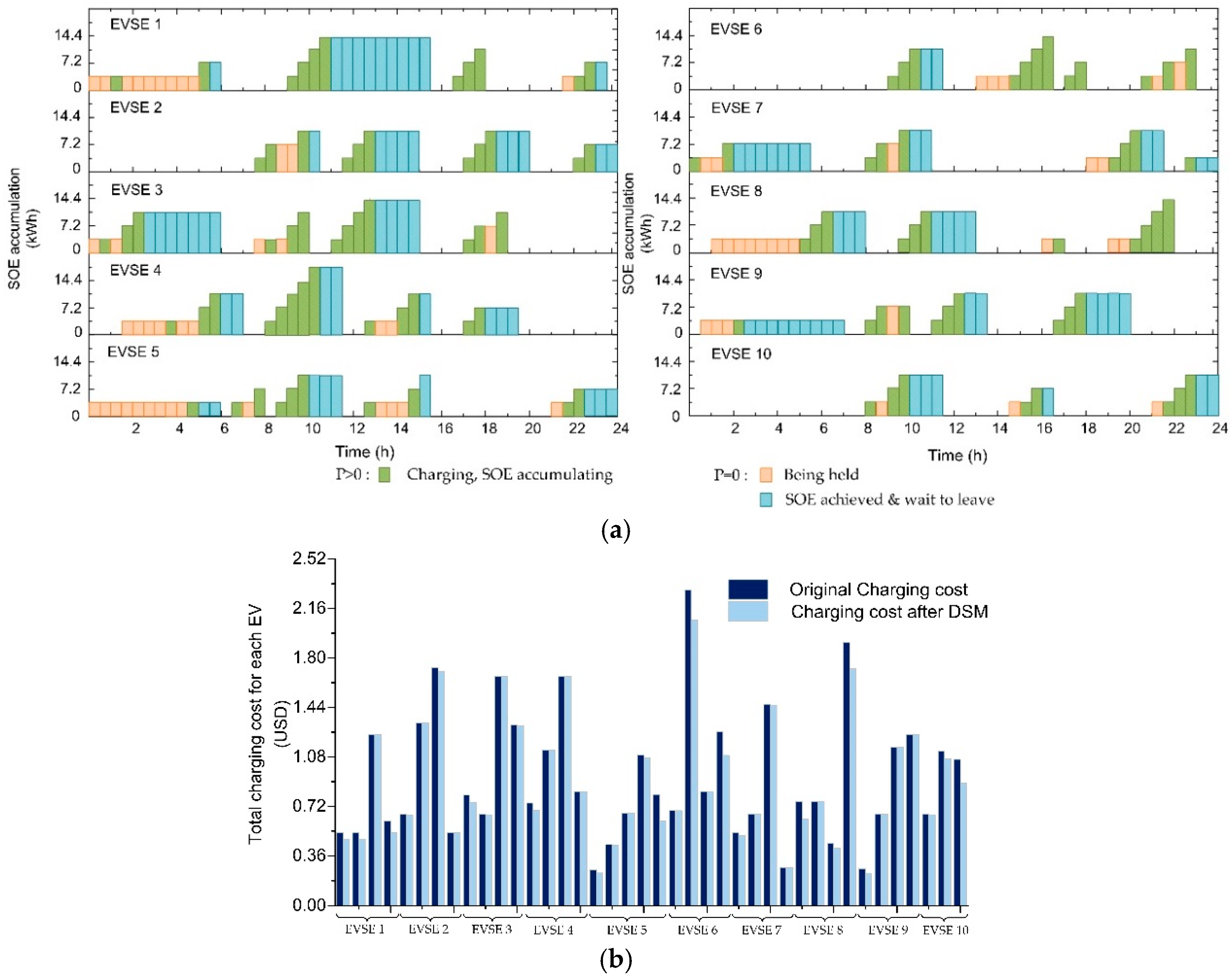
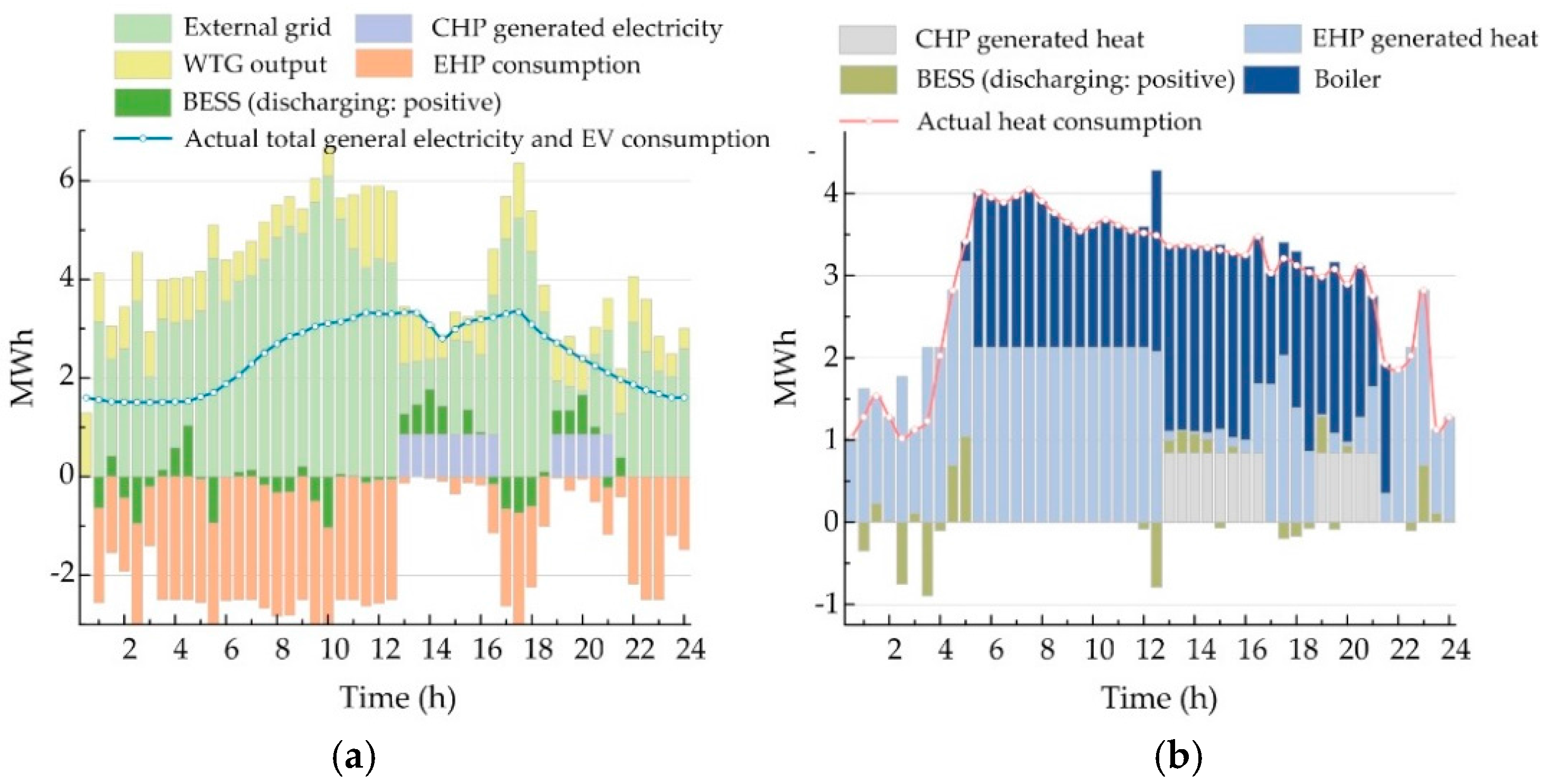
5.2. Simulation and Discussion
5.2.1. Dealing with Robust and Stochastic Uncertainties
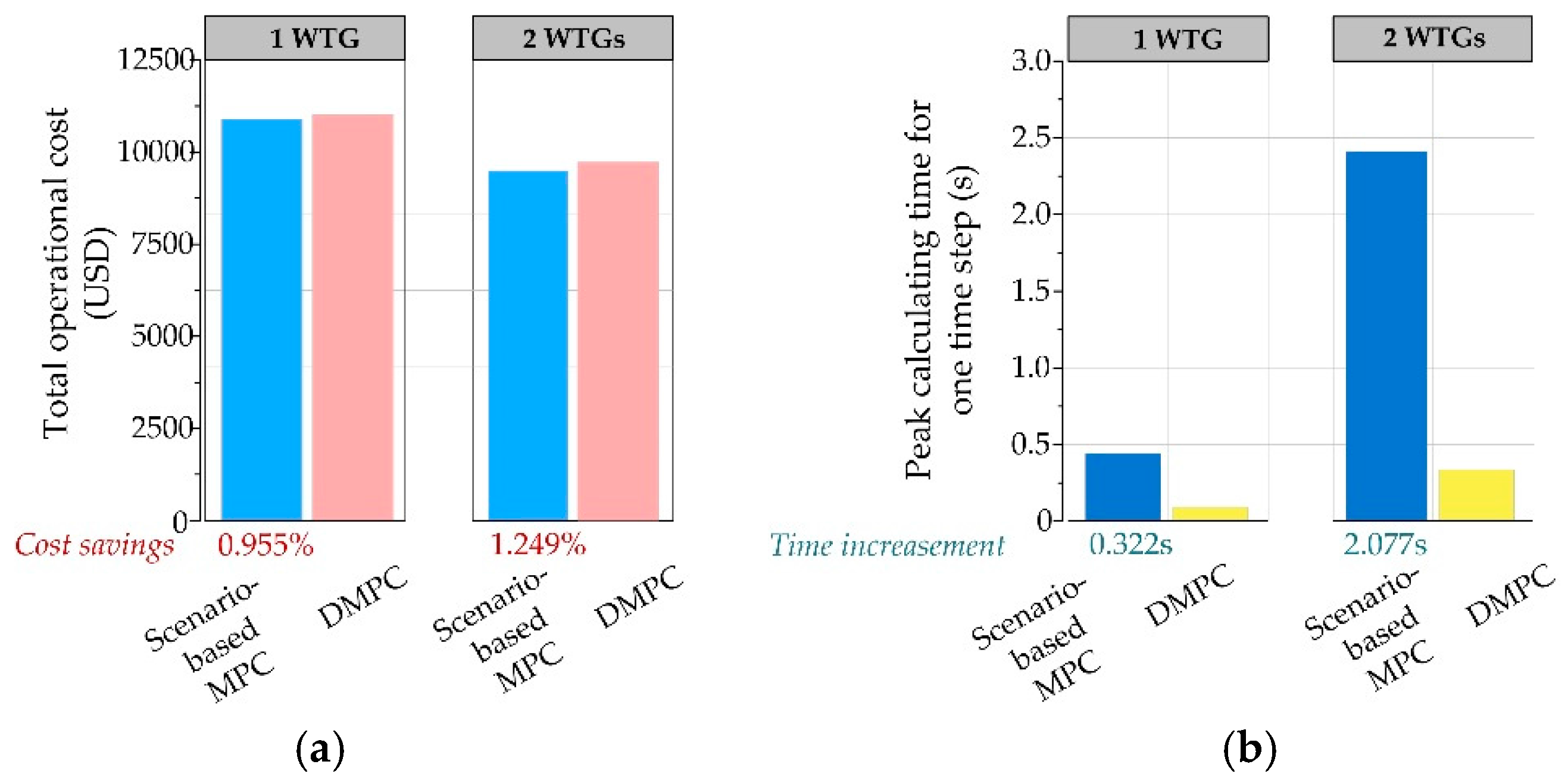
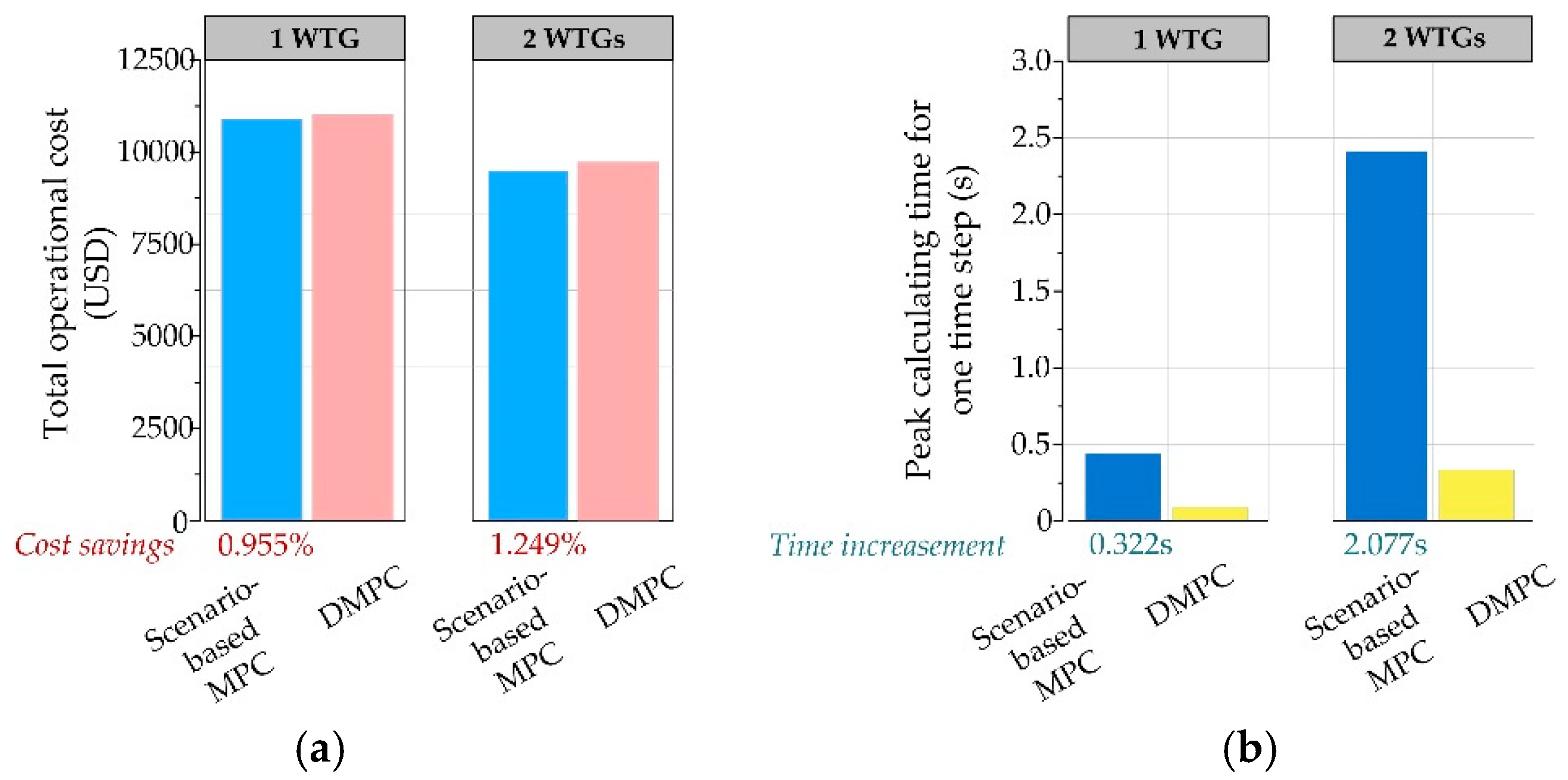
5.2.2. Dealing with Increasing Scenario Sizes
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Khodaei, A.; Shay, B.; Mohammad, S. Microgrid planning under uncertainty. IEEE Trans. Power Syst. 2015, 30, 2417–2425. [Google Scholar] [CrossRef]
- Song, N.; Lee, J.; Kim, H. Optimal electric and heat energy management of multi-microgrids with sequentially-coordinated operations. Energies 2016, 9. [Google Scholar] [CrossRef]
- Ahmad, K.; Naeem, M.; Iqbal, M.; Qaisar, S.; Anpalagan, A. A compendium of optimization objectives, constraints, tools and algorithms for energy management in microgrids. Renew. Sust. Energ. Rev. 2016, 58, 1664–1683. [Google Scholar] [CrossRef]
- Lin, W.; Tu, C.; Tsai, M. Energy Management Strategy for Microgrids by Using Enhanced Bee Colony Optimization. Energies 2015, 9, 5–20. [Google Scholar] [CrossRef]
- Liang, H.; Zhuang, W. Stochastic modeling and optimization in a microgrid: A survey. Energies 2014, 7, 2027–2050. [Google Scholar] [CrossRef]
- Shariatzadeh, F.; Mandal, P.; Srivastava, A. Demand response for sustainable energy systems: A review, application and implementation strategy. Renew. Sust. Energy Rev. 2015, 45, 343–350. [Google Scholar] [CrossRef]
- Hu, J.; Morais, H.; Sousa, T.; Lind, M. Electric vehicle fleet management in smart grids: A review of services, optimization and control aspects. Renew. Sust. Energy Rev. 2016, 56, 1207–1226. [Google Scholar] [CrossRef] [Green Version]
- Parisio, A.; Rikos, E.; Glielmo, L. A model predictive control approach to microgrid operation optimization. IEEE Trans. Syst. Technol. 2014, 22, 1813–1827. [Google Scholar] [CrossRef]
- Hussain, A.; Bui, V.; Kim, H. Robust optimization-based scheduling of multi-microgrids considering uncertainties. Energies 2016, 9. [Google Scholar] [CrossRef]
- Zheng, Q.; Wang, J.; Liu, A. Stochastic optimization for unit commitment—A review. IEEE Trans. Power Syst. 2015, 30, 1913–1924. [Google Scholar] [CrossRef]
- Schildbach, G.; Fagiano, L.; Frei, C.; Morari, M. The scenario approach for stochastic model predictive control with bounds on closed-loop constraint violations. Automatica 2014, 50, 3009–3018. [Google Scholar] [CrossRef]
- Mayne, D. Model predictive control: Recent developments and future promise. Automatica 2014, 50, 2967–2986. [Google Scholar] [CrossRef]
- Wang, Z.; Chen, B.; Wang, J.; Kim, J.; Begovic, M. Robust optimization based optimal DG placement in microgrids. IEEE Trans. Smart Grid 2014, 5, 2173–2182. [Google Scholar] [CrossRef]
- Kim, S.; Giannakis, G. Scalable and robust demand response with mixed-integer constraints. IEEE Trans. Smart Grid 2013, 4, 2089–2099. [Google Scholar]
- Liu, G.; Xu, Y.; Tomsovic, K. Bidding strategy for microgrid in day-ahead market based on hybrid stochastic/robust optimization. IEEE Trans. Smart Grid 2016, 7, 227–237. [Google Scholar] [CrossRef]
- Gerards, M.; Hurink, J. Robust peak-shaving for a neighborhood with electric vehicles. Energies 2016, 9. [Google Scholar] [CrossRef]
- Kou, P.; Liang, D.; Gao, L.; Gao, F. Stochastic coordination of plug-in electric vehicles and wind turbines in microgrid: A model predictive control approach. IEEE Trans. Smart Grid 2016, 7, 1537–1551. [Google Scholar] [CrossRef]
- Aziz, M.; Oda, T.; Mitani, T.; Watanabe, Y.; Kashiwagi, T. Utilization of Electric Vehicles and Their Used Batteries for Peak-Load Shifting. Energies 2015, 8, 3720–3738. [Google Scholar] [CrossRef]
- Soman, S.; Zareipour, H.; Malik, O.; Mandal, P. A review of wind power and wind speed forecasting methods with different time horizons. In Proceedings of North American Power Symposium, Arlington, VA, USA, 26–28 September 2010; pp. 1–8.
- Haque, A.; Nehrir, H.; Mandal, P. A hybrid intelligent model for deterministic and quantile regression approach for probabilistic wind power forecasting. IEEE Trans. Power Syst. 2014, 29, 1663–1672. [Google Scholar] [CrossRef]
- Bello, A.; Reneses, J.; Muñoz, A.; Delgadillo, A. Probabilistic forecasting of hourly electricity prices in the medium-term using spatial interpolation techniques. Int. J. Forecast. 2016, 32, 966–980. [Google Scholar] [CrossRef]
- Li, Z.; Zang, C.; Zeng, P.; Yu, H. Combined two-stage stochastic programming and receding horizon control strategy for microgrid energy management considering uncertainty. Energies 2016, 9. [Google Scholar] [CrossRef]
- Zakariazadeh, A.; Jadid, S.; Siano, P. Economic-environmental energy and reserve scheduling of smart distribution systems: A multi-objective mathematical programming approach. Energy Convers. Manag. 2014, 78, 151–164. [Google Scholar] [CrossRef]
- Gröwe-Kuska, N.; Heitsch, H.; Romisch, W. Scenario reduction and scenario tree construction for power management problems. In Proceedings of the Power Tech Conference, Bologna, Italy, 23–26 June 2003.
- Feng, Y.; Ryan, S. Scenario construction and reduction applied to stochastic power generation expansion planning. Comput. Oper. Res. 2013, 40, 9–23. [Google Scholar] [CrossRef]
- Pereira, M.V.; Pinto, L.M. Multi-stage stochastic optimization applied to energy planning. Math. Program. 1991, 52, 359–375. [Google Scholar] [CrossRef]
- Benders, J. Partitioning procedures for solving mixed-variables programming problems. Numer. Math. 1962, 4, 238–252. [Google Scholar] [CrossRef]
- Harb, H.; Reinhardt, J.; Streblow, R.; Müller, D. MIP approach for designing heating systems in residential buildings and neighbourhoods. J. Bldg. Perform. Simul. 2015, 9, 316–330. [Google Scholar] [CrossRef]
- Moreira, R. Business models for energy storage systems. Ph.D. Thesis, Imperial Collage London, London, UK, 2015. [Google Scholar]
- Sundstrom, O.; Binding, C. Flexible charging optimization for electric vehicles considering distribution grid constraints. IEEE Trans. Smart Grid 2012, 3, 26–37. [Google Scholar] [CrossRef]
- Kim, J.; Kim, S.; Jin, Y.; Park, J.; Yoon, Y. Optimal coordinated management of a plug-in electric vehicle charging station under a flexible penalty contract for voltage security. Energies 2016, 9. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Value | Assignment | Circumstances |
|---|---|---|
| 0 | No charging load | The desired SOEz,set has been achieved; Original charging behavior is arranged to be held by DSM. |
| 1 | Positive charging load | Unpostponable charging of actual-connected EVs; Unpostponable charging of virtual-connected EVs; Arranged charging behavior by DSM. |
| Type | Rated Power | Other Parameters |
|---|---|---|
| CHP | Gg,max = 2.45 MW | ηg = 0.75~0.85, ηge = 0.35~0.40 |
| EHP | Hh,max = 2.5 MW | COPh = 3.0 |
| Boiler | Hl,max = 2.65 MW | ηl,t = 0.85 |
| BESS | Ec,max = 2.4 MW, Ed,max = 2.4 MW | ηb,c = 0.95, ηb,d = 0.95, ηb = 0.99, SOEb,max = 4 MWh, SOEb,min = 0.8 MWh |
| Water tank | Ec,max = 2 MW, Ed,min = 2 MW | ηs,c = 0.90, ηb,d = 0.90, ηs = 0.95, Cs,max = 26 MWh, Cs,min = 12 MWh |
| EVSE No. | EV Charging Request Data |
|---|---|
| 1 | {7.2, 0:00–6:00}, {14.4, 9:00–15:30}, {10.8, 16:00–18:00}, {7.2, 21:30–23:30} |
| 2 | {10.8, 7:30–10:30}, {10.8, 11:30–15:00}, {14.4, 16:30–20:30}, {7.2, 22:00–24:00} |
| 3 | {10.8, 0:00–6:00}, {10.8, 7:30–10:00}, {14.4, 11:00–15:00}, {10.8, 17:00–19:00} |
| 4 | {10.8, 1:30–7:00}, {18.0, 8:00–11:30}, {10.8, 12:30–15:30}, {7.2, 17:00–19:30} |
| 5 | {3.6, 1:30–6:00}, {7.2, 6:30–8:00}, {10.8, 8:30–11:30}, {7.2, 12:30–15:30},{7.2, 21:00–24:00} |
| 6 | {10.8, 9:00–11:30}, {14.4, 13:00–16:30}, {7.2, 17:00–18:00}, {10.8, 20:30–23:00} |
| 7 | {7.2, 0:00–5:30}, {10.8, 8:00–11:00}, {10.8, 18:00–21:30}, {3.6, 22:30–24:00} |
| 8 | {10.8, 1:00–8:00}, {10.8, 9:30–13:00}, {3.6, 16:00–17:00}, {14.4, 19:00–22:00} |
| 9 | {3.6, 0:30–7:00}, {10.8, 8:00–10:00}, {10.8, 11:00–13:30}, {10.8, 16:30–20:30} |
| 10 | {10.8, 8:00–11:30}, {7.2, 14:30–16:30}, {10.8, 21:00–24:00} |
| Setting Values | Total 1 Operational Cost (USD) | Peak Calculating Time for One Time Step 1 (s) | ||||
|---|---|---|---|---|---|---|
| Installed WTG number | Scenario-based MPC | DMPC | Scenario-based MPC | DMPC | ||
| without BD | with BD | without BD | with BD | |||
| 1 | 10,898.07 | 10,902.76 | 11,003.12 | 0.404 | 0.095 | 0.082 |
| 2 | 8944.95 | 8957.33 | 9056.64 | 2.367 | 0.331 | 0.290 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ji, Z.; Huang, X.; Xu, C.; Sun, H. Accelerated Model Predictive Control for Electric Vehicle Integrated Microgrid Energy Management: A Hybrid Robust and Stochastic Approach. Energies 2016, 9, 973. https://doi.org/10.3390/en9110973
Ji Z, Huang X, Xu C, Sun H. Accelerated Model Predictive Control for Electric Vehicle Integrated Microgrid Energy Management: A Hybrid Robust and Stochastic Approach. Energies. 2016; 9(11):973. https://doi.org/10.3390/en9110973
Chicago/Turabian StyleJi, Zhenya, Xueliang Huang, Changfu Xu, and Houtao Sun. 2016. "Accelerated Model Predictive Control for Electric Vehicle Integrated Microgrid Energy Management: A Hybrid Robust and Stochastic Approach" Energies 9, no. 11: 973. https://doi.org/10.3390/en9110973
APA StyleJi, Z., Huang, X., Xu, C., & Sun, H. (2016). Accelerated Model Predictive Control for Electric Vehicle Integrated Microgrid Energy Management: A Hybrid Robust and Stochastic Approach. Energies, 9(11), 973. https://doi.org/10.3390/en9110973