Modelling, Analysis and Performance Evaluation of Power Conversion Unit in G2V/V2G Application—A Review


 and
and
Abstract
:1. Introduction
- Light duty: which includes passengers cars and small transports;
- Medium duty, such us vans;
- Heavy duty, like tracks and buses.
2. Battery Charging Technologies
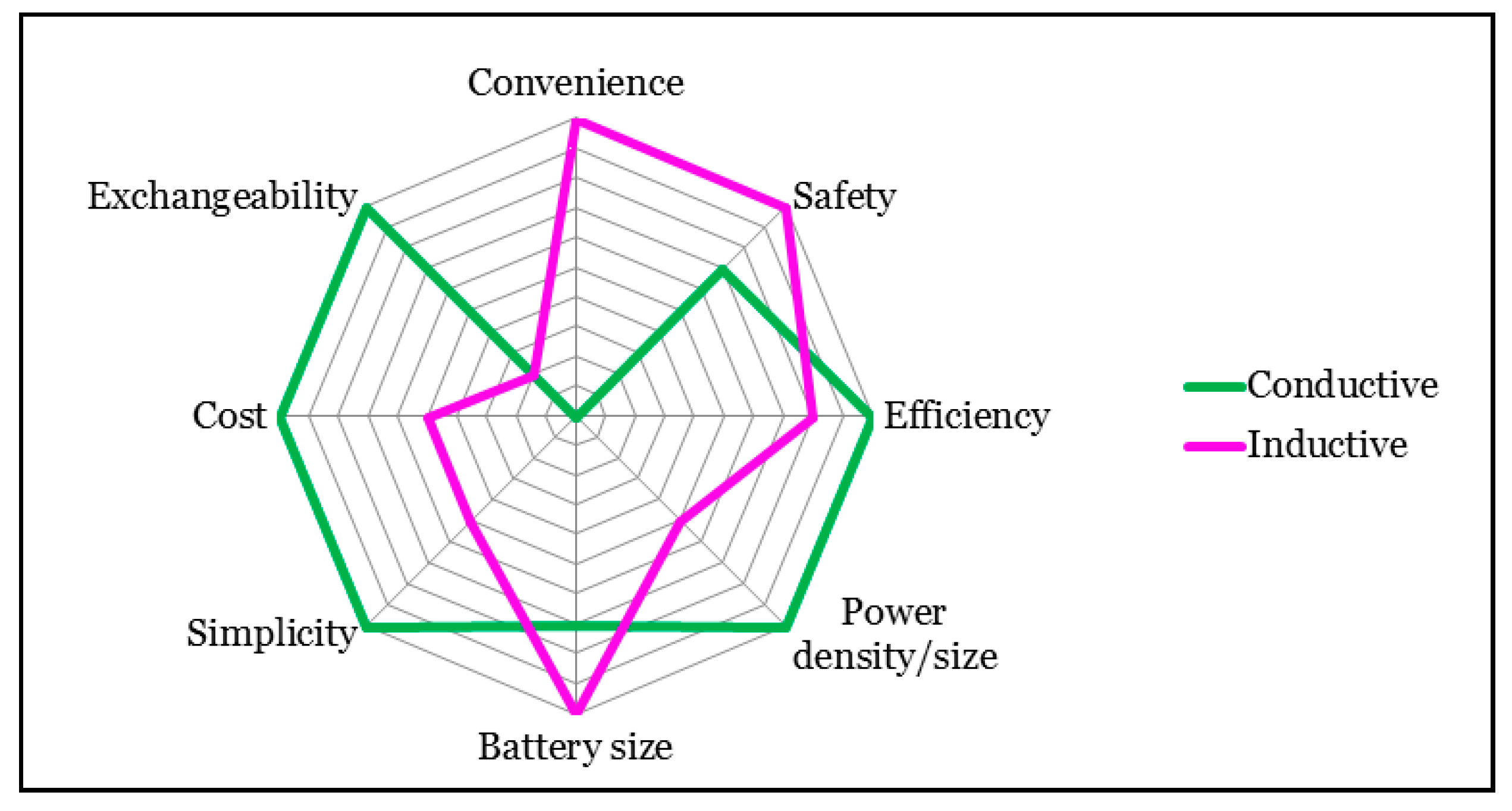
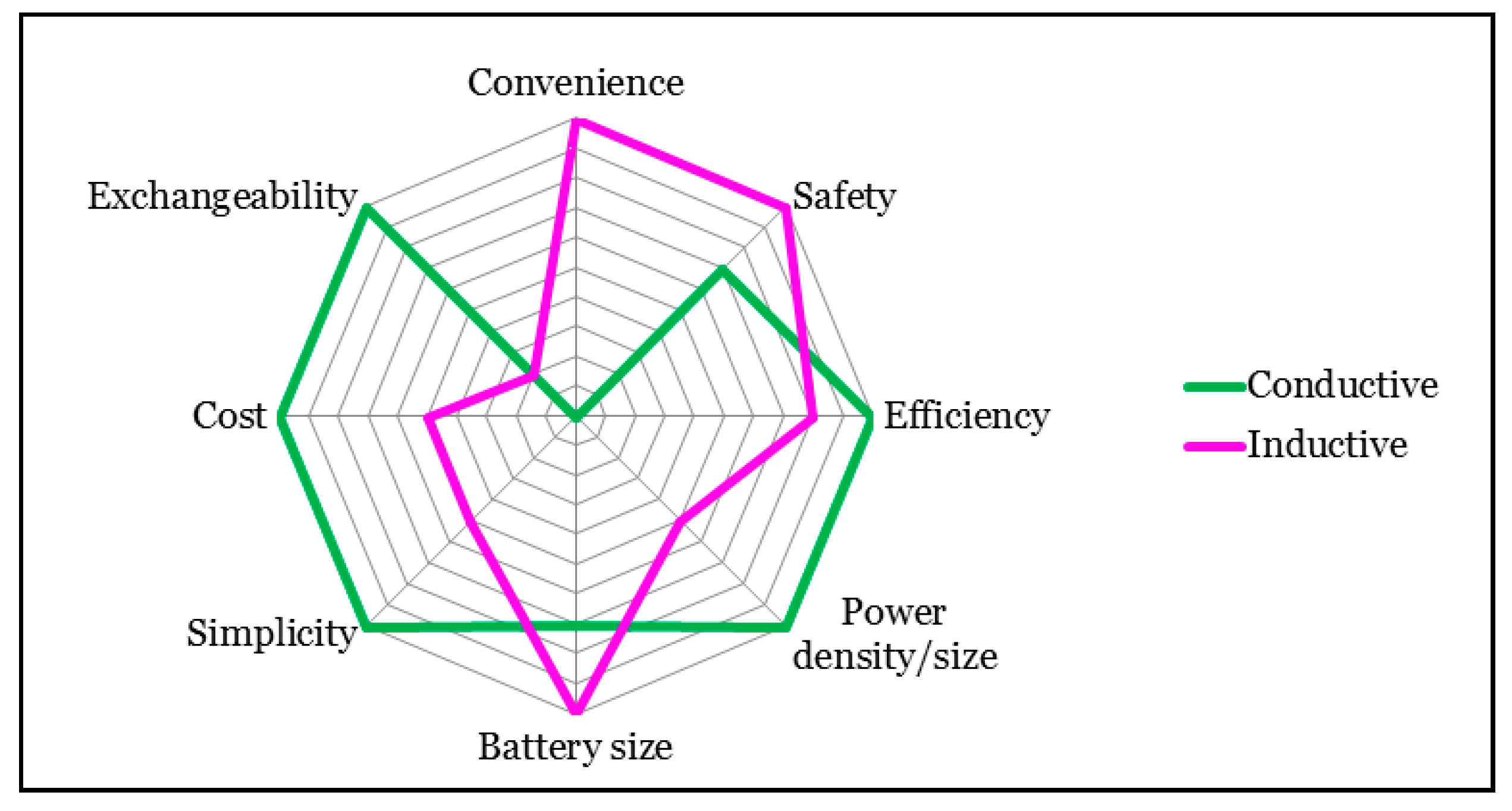
2.1. Conductive vs. Inductive Chargers
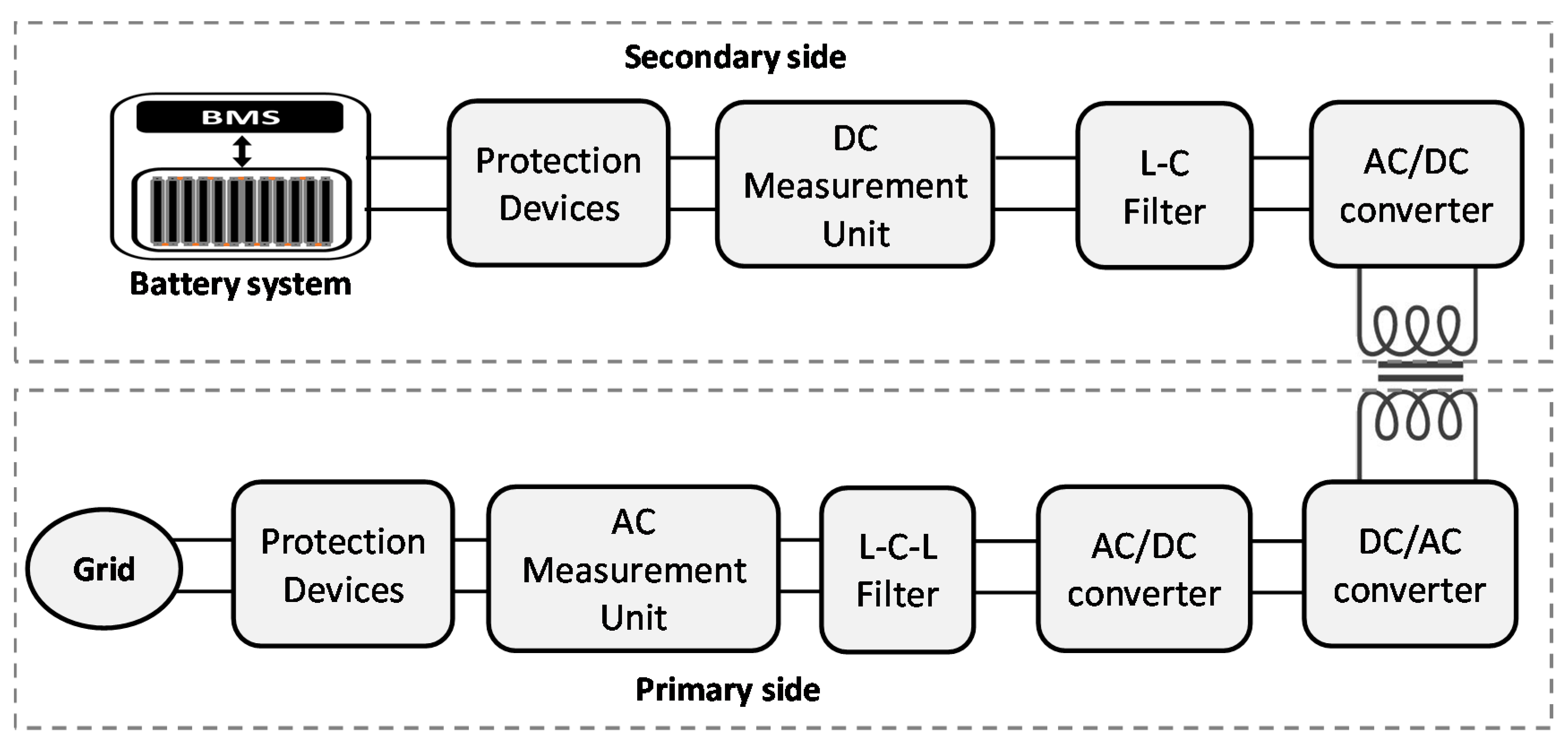
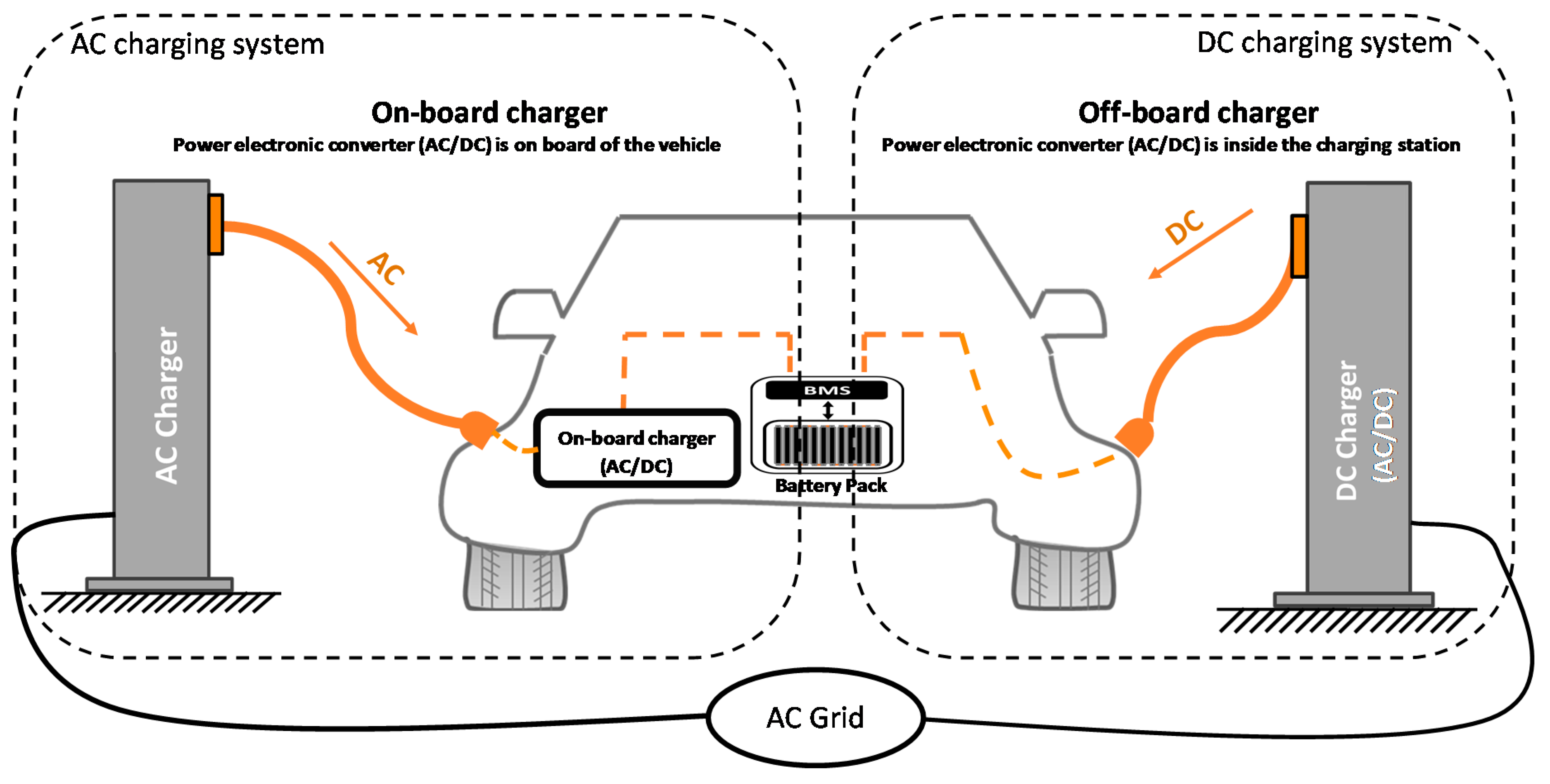
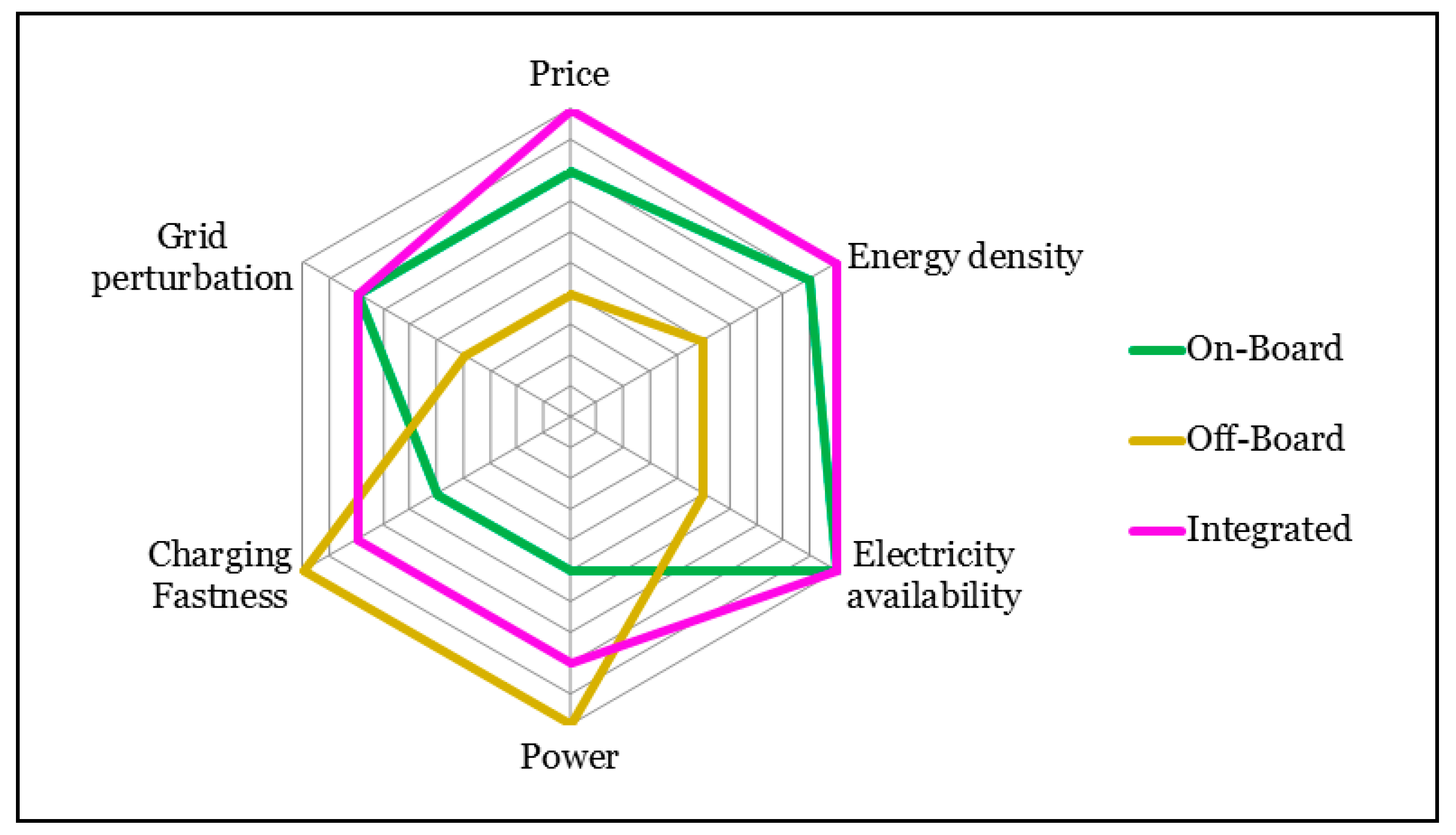
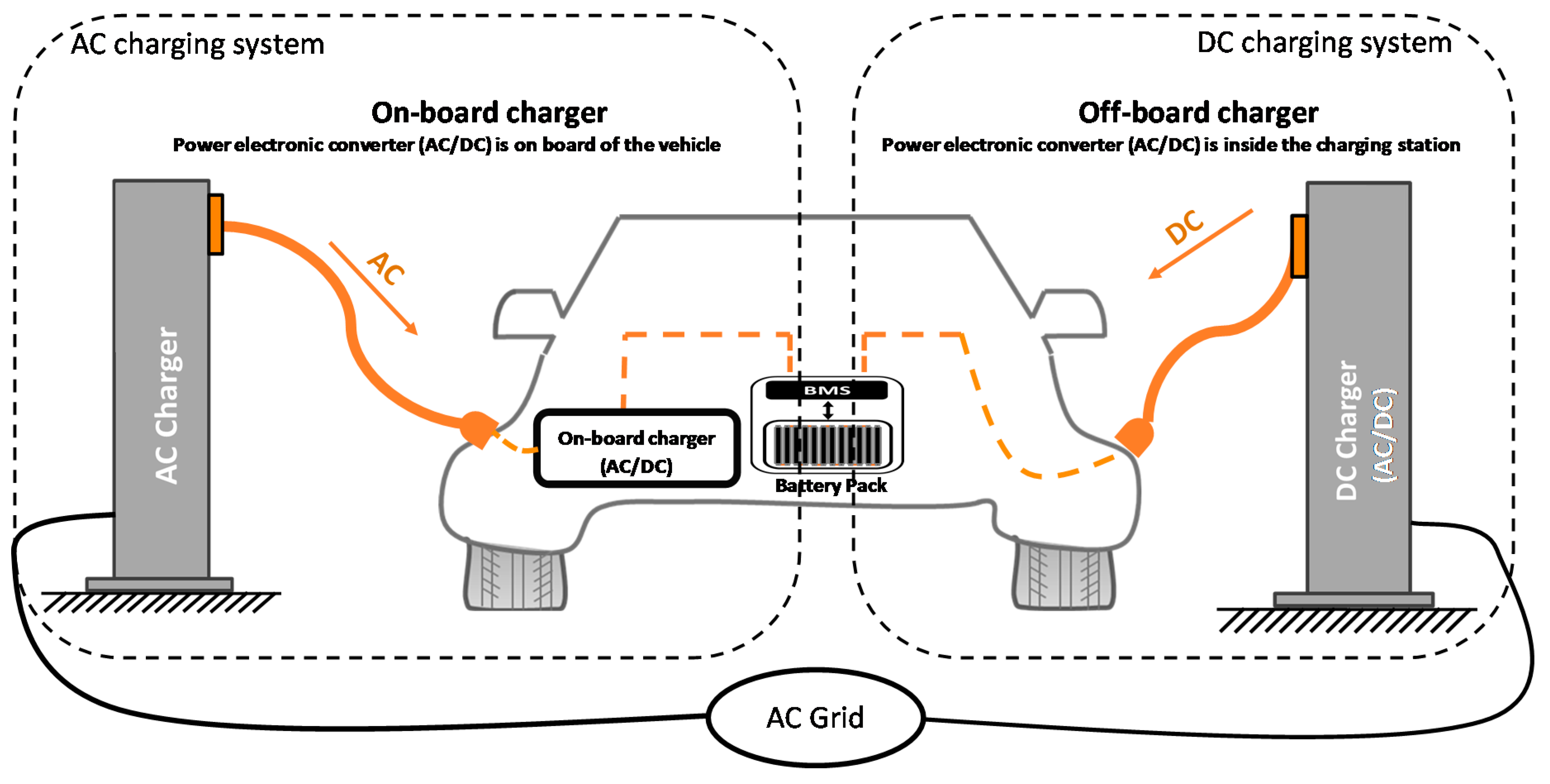
2.2. On-Board vs. Off-Board Chargers
2.3. Unidirectional vs. Bidirectional Chargers
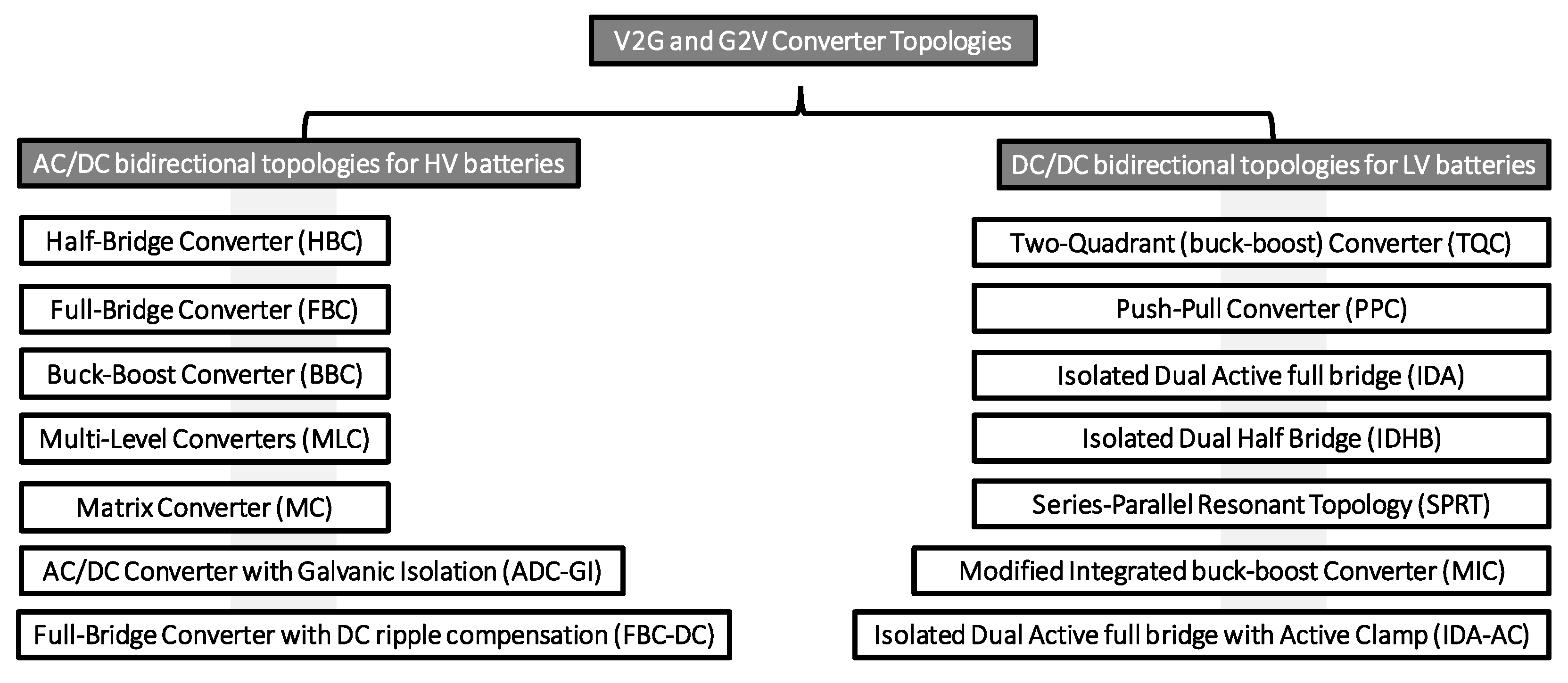
2.4. Assessment of V2G and G2V Converter Topologies
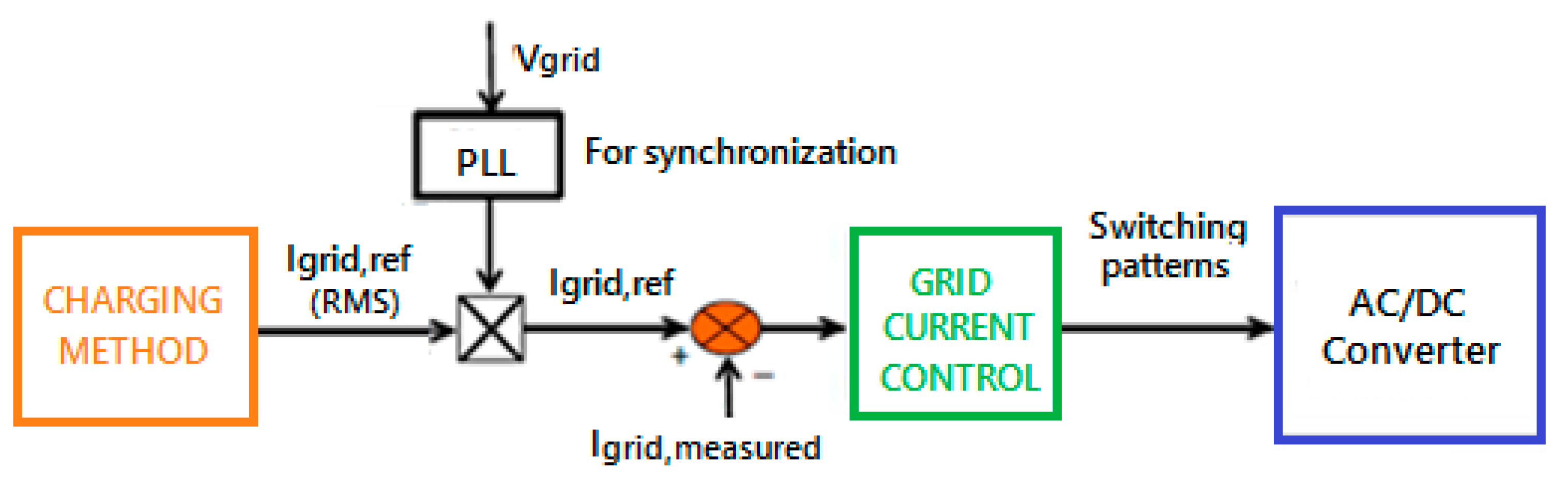
3. Modeling and Control of V2G and G2V Systems
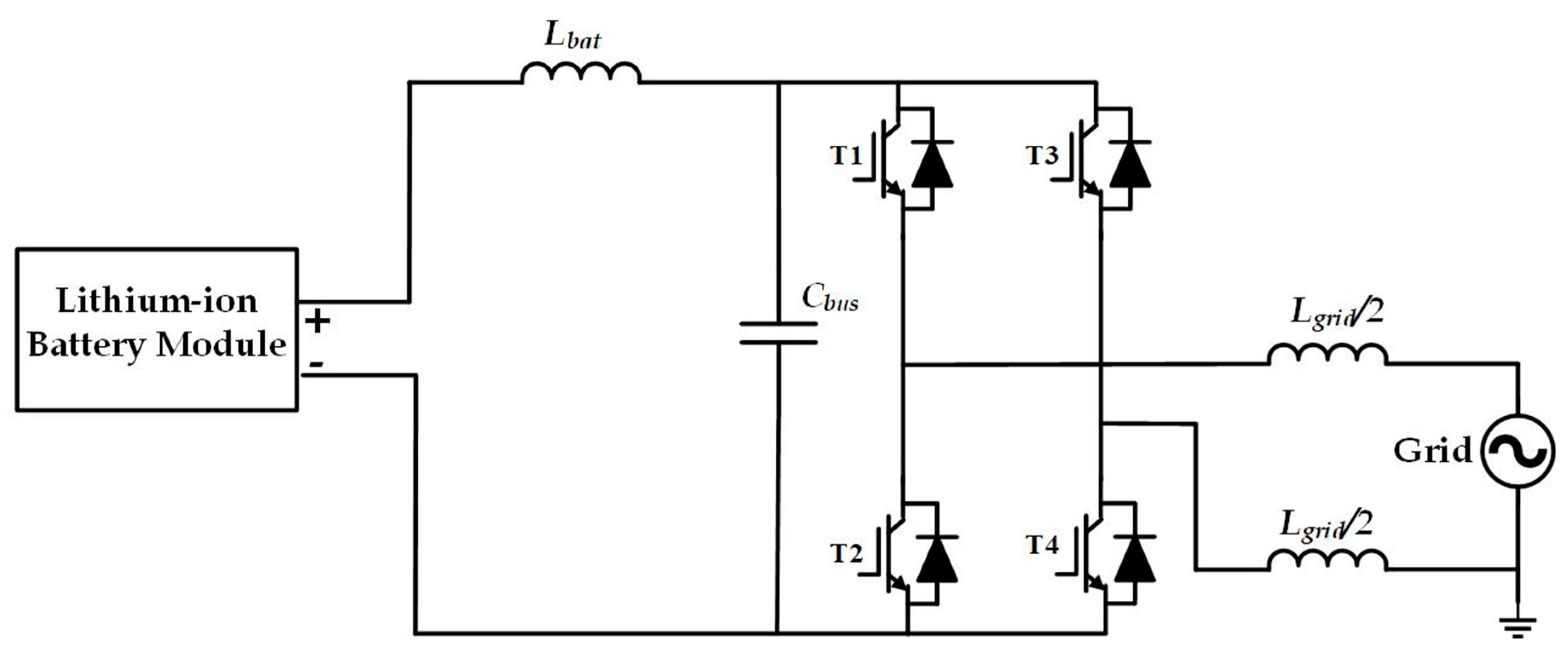
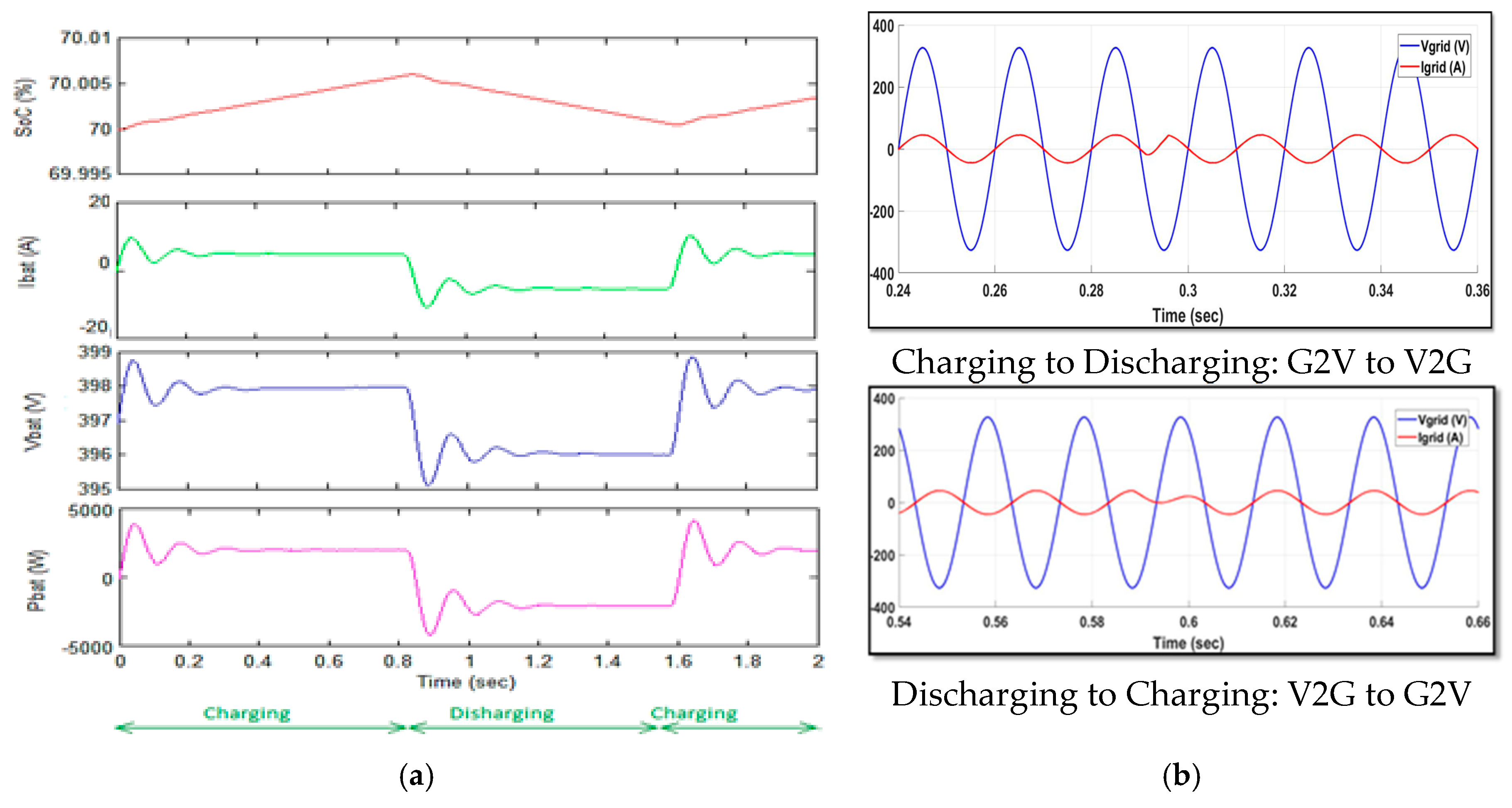
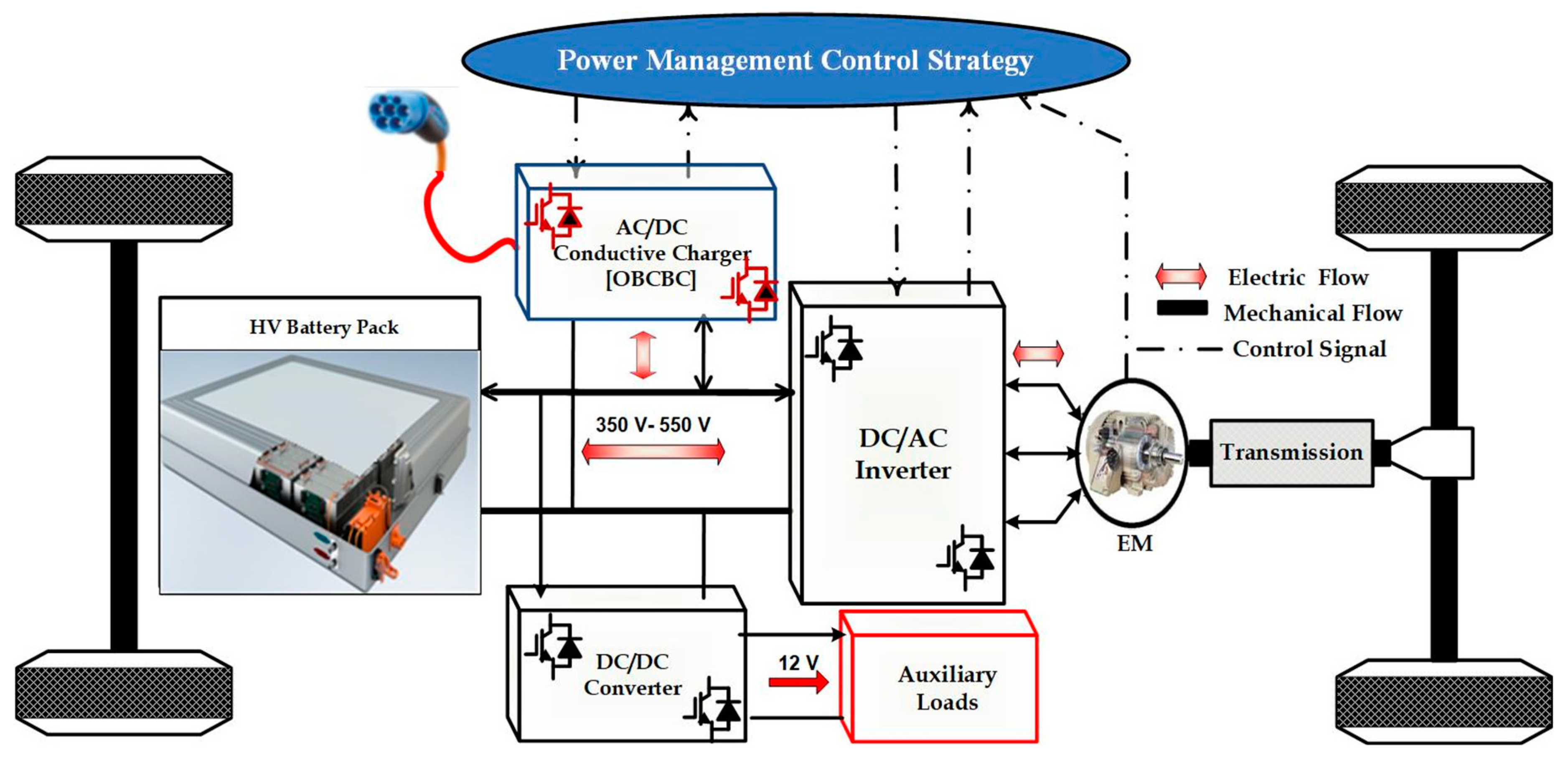
3.1. V2G and G2V Systems for Light-Duty (LD) Vehicles
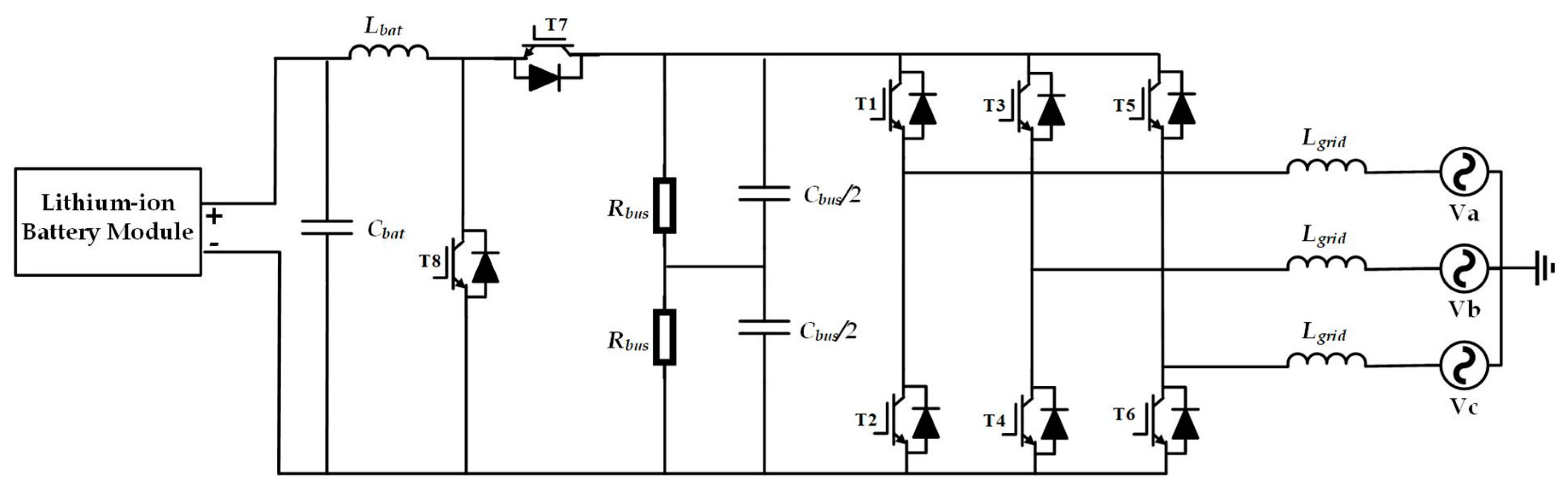
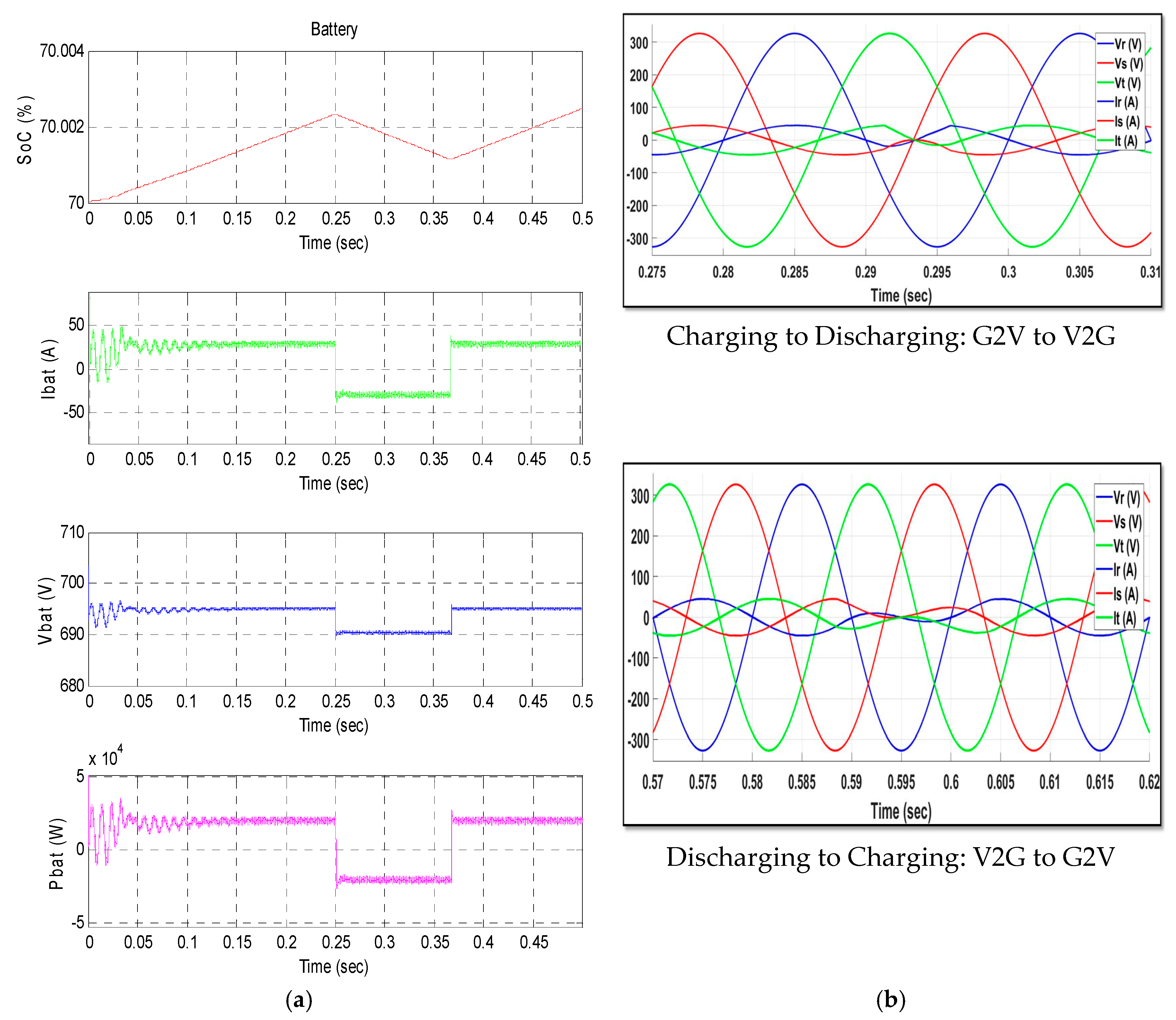
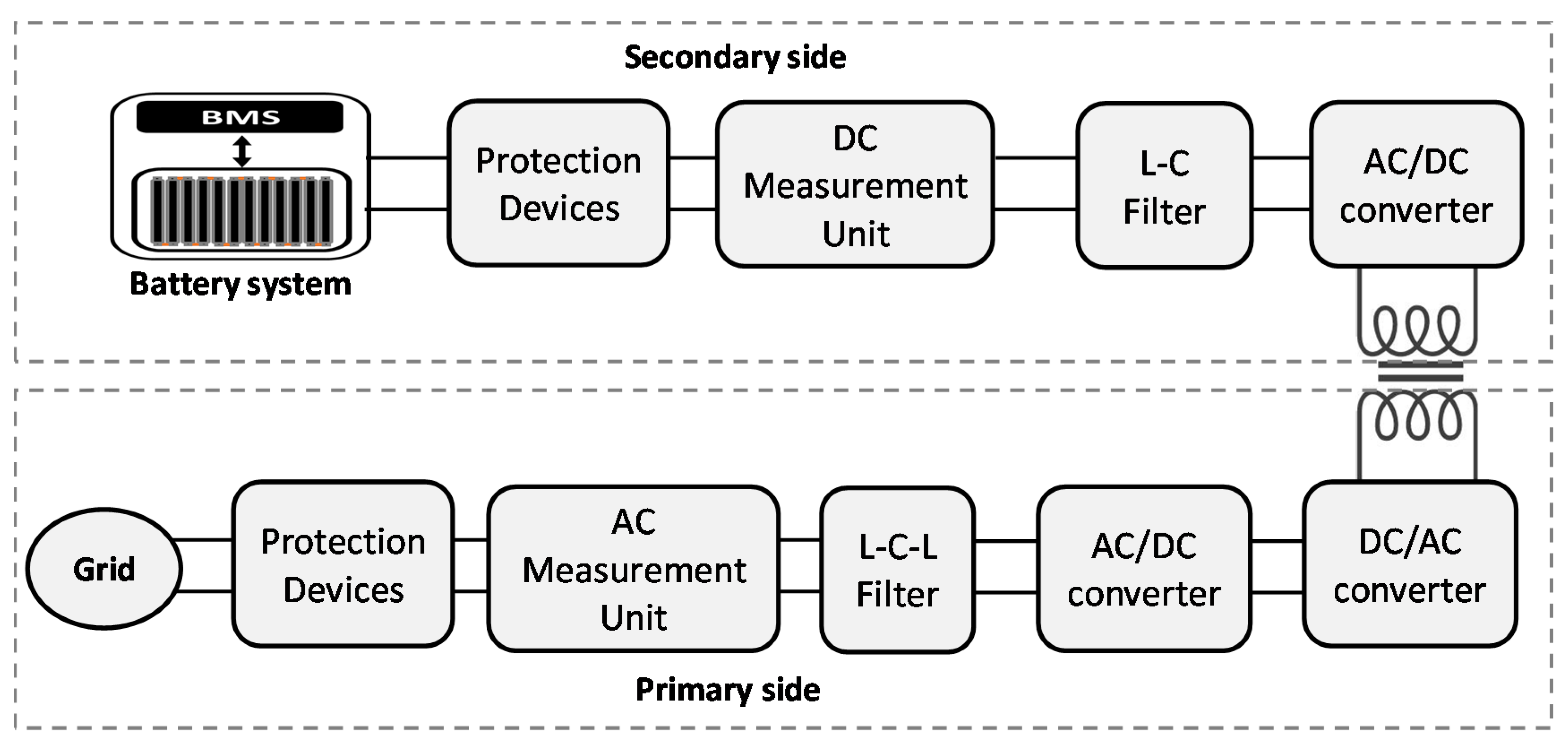
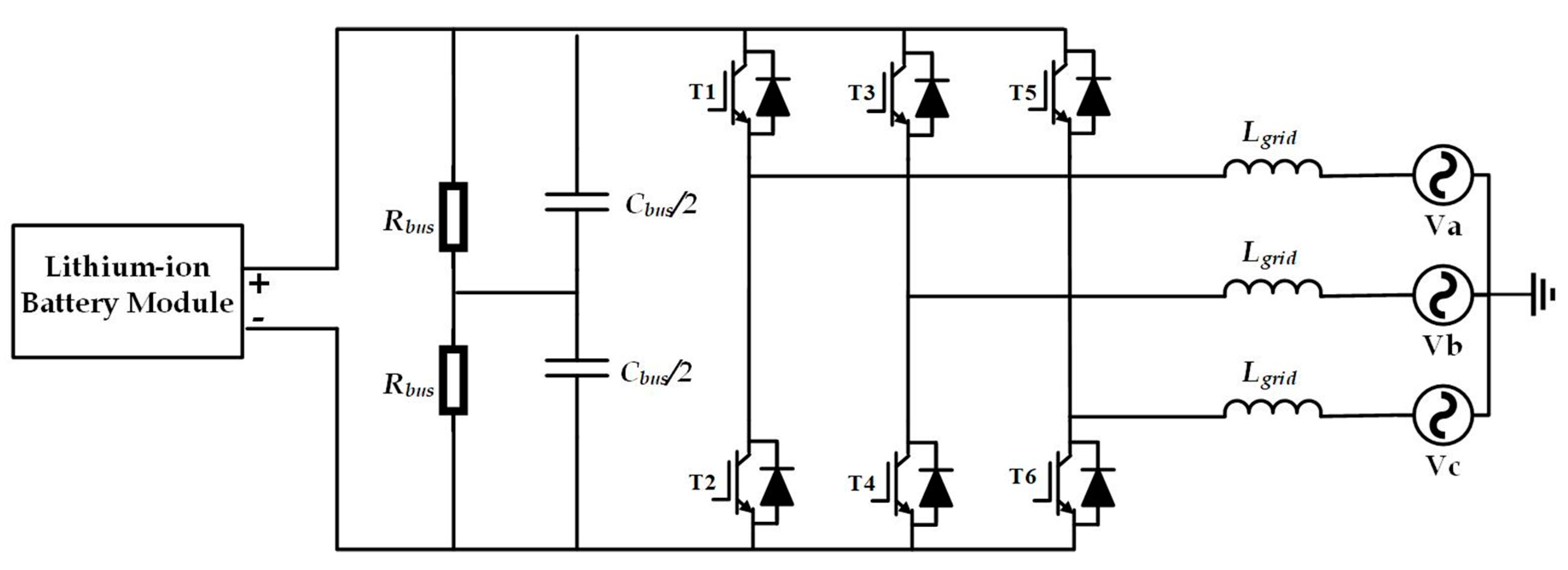
3.2. V2G and G2V Systems for Heavy-Duty (HD) Vehicles
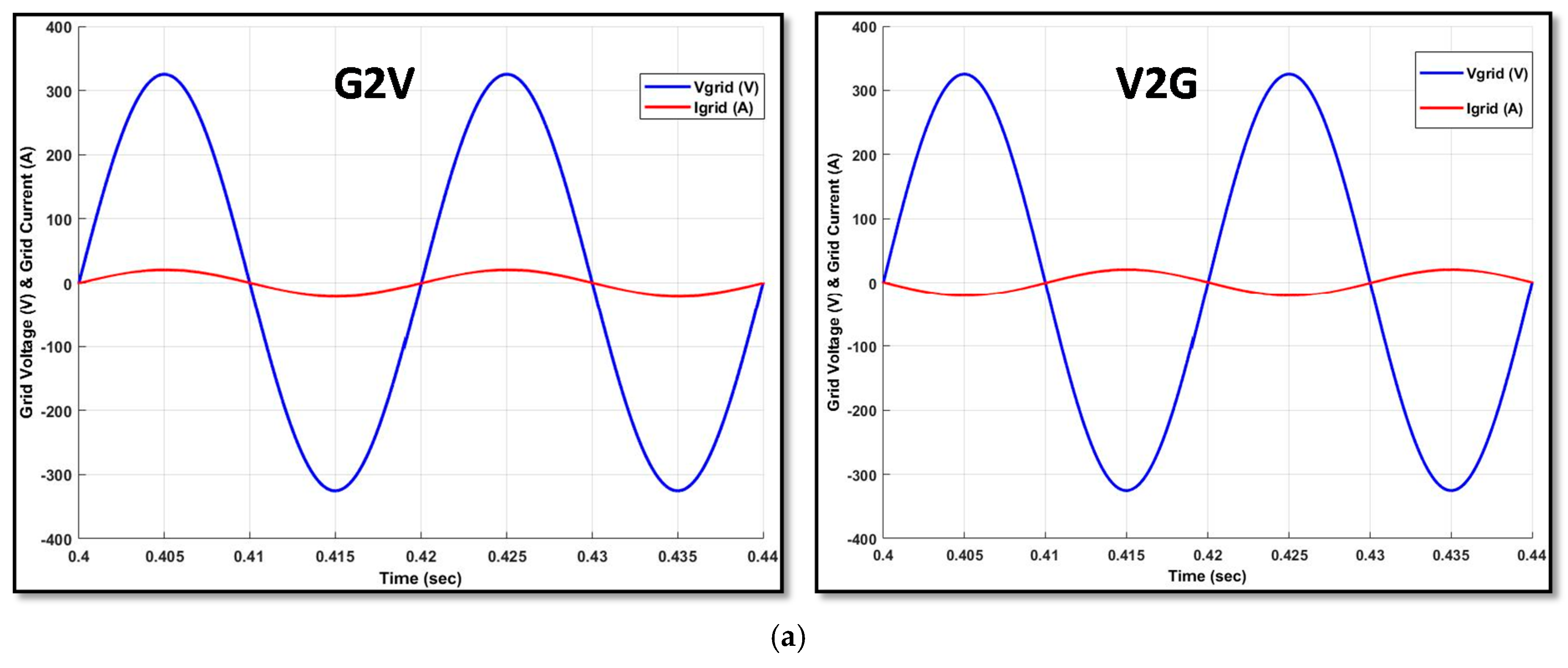
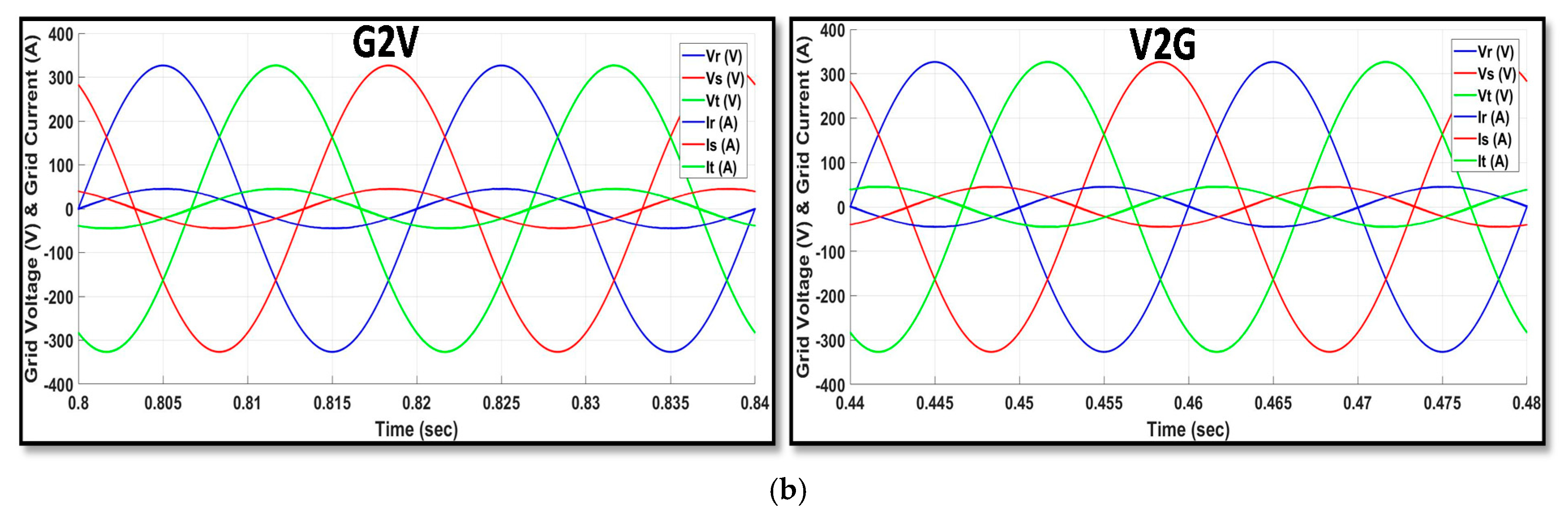
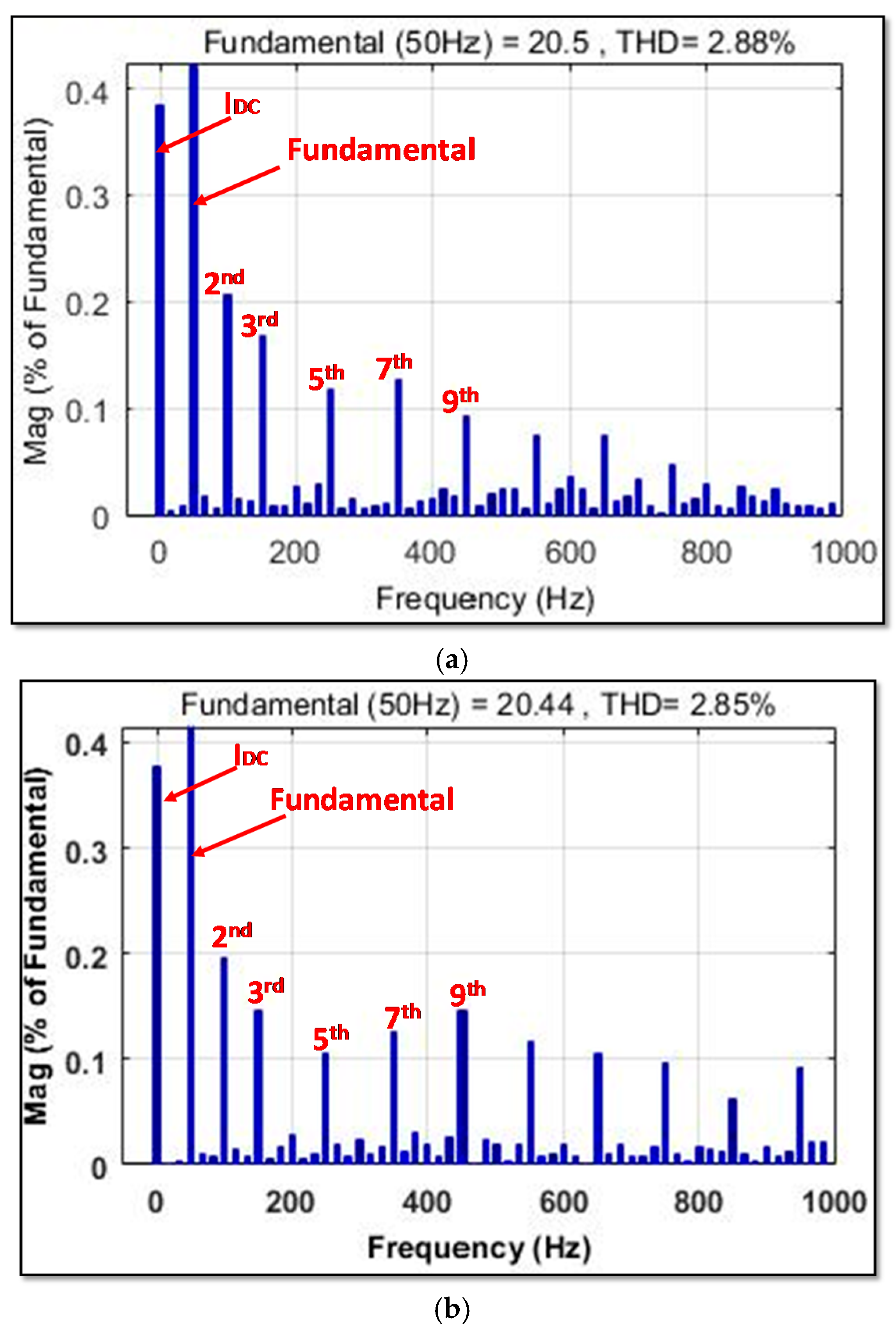
4. Results and Discussion
5. Comparative Study
6. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
Abbreviations
| Electric vehicle | |
| Grid-to-vehicle | |
| Vehicle-to-grid | |
| Plug-in electric vehicles | |
| Plug-in hybrid vehicles | |
| OCV | Open Circuit Voltage |
| SoC | State-of-Charge (%) |
| Constant current | |
| Constant voltage | |
| Phase locked loop | |
| High voltage | |
| EMC | Electromagnetic compatibility |
| LV | Low voltage |
| CENELEC | European committee for electrotechnical standarization |
| MOSFET | Metal-oxide-semiconductor field-effect transistor |
| IGBT | Insulated-gate bipolar transistor |
| GTO | Gate Turn-Off Switch |
| THD | total harmonic distortion |
| FFT | Fast Fourier transform |
References
- Chan, C.C.; Chau, K.T. An overview of power Electronics in electric vehicles. IEEE Trans. Ind. Electron. 1997, 44, 3–13. [Google Scholar] [CrossRef] [Green Version]
- Darabi, Z.; Ferdowsi, M. Aggregated Impact of Plug-In Hybrid Electric Vehicles on Electricity Demand Profile. IEEE Trans. Sustain. Energy 2011, 2, 319–349. [Google Scholar] [CrossRef]
- Wirasingha, S.G.; Emadi, A. Pihef: Plug-in hybrid electric factor. IEEE Trans. Veh. Technol. 2011, 60, 1279–1284. [Google Scholar] [CrossRef]
- Habib, S.; Kamran, M.; Rashid, U. Impact analysis of vehicle-to-grid technology and charging strategies of electric vehicles on distribution networks—A review. J. Power Sources 2015, 277, 205–214. [Google Scholar] [CrossRef]
- Sandalow, D.B. Plug-In Electric Vehicles: What Role for Washington? 1st ed.; Brookings Institution Press: Washington, DC, USA, 2009. [Google Scholar]
- Hegazy, O.; Van Mierlo, J.; Barrero, R.; Lataire, P.; Omar, N.; Coosemans, T. A comparative study of different control strategies of On-Board Battery Chargers for Battery Electric Vehicles. In Proceedings of the Eighth International Conference and Exhibition on Ecological Vehicles and Renewable Energies (EVER), Monte Carlo, Monaco, 27–30 March 2013; pp. 1–6. [Google Scholar]
- Yilmaz, M.; Krein, P.T. Review of benefits and challenges of vehicle-to-grid technology. In Proceedings of the IEEE Energy Conversion Congress and Exposition (ECCE), Raleigh, NC, USA, 15–20 September 2012; pp. 3082–3089. [Google Scholar]
- Keane, E.; Flynn, D. Potential for electric vehicles to provide power system reserve. In Proceedings of the IEEE PES Innovative Smart Grid Technologies (ISGT), Washington, DC, USA, 16–20 January 2012; No. 9. pp. 1–7. [Google Scholar]
- Markel, T. Plug-in Electric Vehicle Infrastructure: A Foundation for Electrified Transportation; NREL/CP-540-47951; NREL: Washington, DC, USA, 2010; pp. 1–10. [Google Scholar]
- Barrios, E. Unit 3: Conversion Stage in Single-Phase Photovoltaic Systems; UPNA: Pamplona, Spain, 2015. [Google Scholar]
- Yilmaz, M.; Krein, P.T. Review of battery charger topologies, charging power levels and infrastructure for plug-in electric and hybrid vehicles. IEEE Trans. Power Electron. 2013, 28, 2151–2169. [Google Scholar] [CrossRef]
- Chopra, S. Contactless Power Tranfer for Electric Vehicle Charging Application. Master’s Thesis, Delft University of Technology, Delft, The Netherlands, 2011. [Google Scholar]
- Bauer, P. Contactless Power Transfer: Inductive Charging of EV. Master’s Thesis, Delf University of Technology, Delft, The Netherlands, 2010. [Google Scholar]
- Mi, C. Safely Charging EV and PHEV from the Electricity Grid: Introduction to EV/PHEV; University of Michigan-Dearborn: Dearborn, MI, USA, 2015; No. 313. [Google Scholar]
- Lin, B.; Member, I.; Chen, D.; Tsay, H. Bi-Directional AC/DC Converter based on neutral point clamped. In Proceedings of the IEEE International Symposium on Industrial Electronics, Pusan, Korea, 12–16 June 2001; pp. 1–6. [Google Scholar]
- Miskiewicz, R.M.; Moradewicz, A.J.; Kazmierkowski, M.P. Contactless battery charger with bi-directional energy transfer for plug-in vehicles with vehicle-to-grid capability. In Proceedings of the IEEE International Symposium on Industrial Electronics, Gdansk, Poland, 27–30 June 2011; pp. 1969–1973. [Google Scholar]
- Solero, L. Nonconventional on-board charger for electric vehicle propulsion batteries. IEEE Trans. Veh. Technol. 2001, 50, 144–149. [Google Scholar] [CrossRef]
- Kisacikoglu, M.C.; Ozpineci, B.; Tolbert, L.M. Examination of a PHEV bidirectional charger system for V2G reactive power compensation. In Proceedings of the Twenty-Fifth Annual IEEE Applied Power Electronics Conference and Exposition (APEC), Palm Springs, CA, USA, 21–25 February 2010; pp. 458–465. [Google Scholar]
- Botsford, C.; Szczepanek, A. Fast Charging vs. Slow Charging: Pros and cons for the New Age of Electric Vehicles. In Proceedings of the EVS24 International Battery, Hybrid and Fuel Cell Electric Vehicle Symposium, Stavanger, Norway, 13–16 May 2009; pp. 1–9. [Google Scholar]
- Shireen, W.; Patel, S. Plug-in hybrid electric vehicles in the smart grid environment. In Proceedings of the IEEE PES Transmission and Distribution Conference and Exposition, New Orleans, LA, USA, 19–22 April 2010; pp. 1–4. [Google Scholar]
- Tang, L.; Su, G.-J. A low-cost, digitally-controlled charger for plug-in hybrid electric vehicles. In Proceedings of the IEEE Energy Conversion Congress and Exposition, San Jose, CA, USA, 20–24 September 2009; pp. 3923–3929. [Google Scholar]
- Singh, B.; Singh, B.N.; Chandra, A.; Al-Haddad, K.; Pandey, A.; Kothari, D.P. A review of three-phase improved power quality ac-dc converters. IEEE Trans. Ind. Electron. 2004, 51, 641–660. [Google Scholar] [CrossRef]
- Singh, B.; Singh, B.N.; Chandra, A.; Al-Haddad, K.; Pandey, A.; Kothari, D.P. A Review of Single-Phase Improved Power Quality AC–DC Converters. IEEE Trans. Ind. Electron. 2003, 50, 962–981. [Google Scholar] [CrossRef]
- Zhou, X.; Lukic, S.; Bhattacharya, S.; Huang, A. Design and control of grid-connected converter in bi-directional battery charger for plug-in hybrid electric vehicle application. In Proceedings of the IEEE Vehicle Power and Propulsion Conference (VPPC ’09), Dearborn, MI, USA, 7–10 September 2009; pp. 1716–1721. [Google Scholar]
- Thiringer, T.; Grenier, M.; Aghdam, M.G.H. Design of on-board charger for plug-in hybrid electric vehicle. In Proceedings of the 5th IET International Conference on Power Electronics, Machines and Drives (PEMD 2010), Brighton, UK, 19–21 April 2010; p. 152. [Google Scholar]
- Hegazy, O.; El Baghdadi, M.; Van Mierlo, J.; Lataire, P. Modeling and analysis of different control techniques of conductive battery chargers for electric vehicles applications. COMPEL Int. J. Comput. Math. Electr. Electron. Eng. 2015, 34, 151–172. [Google Scholar] [CrossRef]
- Focus Group on European Electro-Mobility. Standardization for Road Vehicles and Associated Infrastructure—Report in Response to Commision Mandate M/468 Concerning the Charging of Electric Vehicles. October 2011, p. 155. Available online: esci-ksp.org/publication/focus-group-on-european-electro-mobility-standardization-for-road-vehicles-and-associated-infrastructure-report-in-response-to-commission-mandate-m468-concerning-the-charging-of-electric-vehicles/ (accessed on 26 April 2018).
- Karshenas, H.R.; Daneshpajooh, H.; Safaee, A.; Jain, P.; Bakhshai, A. Bidirectional DC-DC Converters for Energy Storage Systems. In Energy Storage Emerging Era Smart Grids; InTech: London, UK, 2011; pp. 161–178. [Google Scholar]
- Erb, D.C.; Onar, O.C.; Khaligh, A. Bi-directional charging topologies for plug-in hybrid electric vehicles. In Proceedings of the Twenty-Fifth Annual IEEE Applied Power Electronics Conference and Exposition (APEC), Palm Springs, CA, USA, 21–25 February 2010; pp. 2066–2072. [Google Scholar]
- Koushki, B.; Safaee, A.; Jain, P.; Bakhshai, A. A Bi-Directional Single-Stage Isolated AC-DC Converter for EV charging and V2G. In Proceedings of the IEEE Electrical Power and Energy Conference (EPEC), London, ON, Canada, 26–28 October 2015; pp. 36–44. [Google Scholar]
- Bell, B. Introduction to Push-Pull and Cascaded Power Converter Topologies; National Semiconductor: Santa Clara, CA, USA, 2003; pp. 1–44. [Google Scholar]
- Du, Y.; Lukic, S.; Jacobson, B.; Huang, A. Review of high power isolated bi-directional DC-DC converters for PHEV/EV DC charging infrastructure. In Proceedings of the IEEE Energy Conversion Congress and Exposition (ECCE), Phoenix, AZ, USA, 17–22 September 2011; pp. 553–560. [Google Scholar]
- Garcés, M.; Alonso, M. Resonant Power Converter for Fuel Cells: Analysis, Design and Simulation; Public University of Navarra: Pamplona, Spain, 2014. [Google Scholar]
- Li, H.; Member, S.; Peng, F.Z.; Member, S.; Lawler, J.S.; Member, S. A Natural ZVS High-Power Bidirectional DC–DC Converter with Minimum Number of Devices. IEEE Trans. Ind. Appl. 2003, 39, 525–535. [Google Scholar] [CrossRef]
- Ursua, A. Unit C: Electrochemical Systems: Basic Aspects about Batteries; UPNA: Pamplona, Spain, 2015. [Google Scholar]
- Abdel-Monem, M.; Trad, K.; Omar, N.; Hegazy, O.; Mantels, B.; Mulder, G.; van den Bossche, P.; van Mierlo, J. Lithium-ion batteries: Evaluation study of different charging methodologies based on aging process q. Appl. Energy 2015, 152, 143–155. [Google Scholar] [CrossRef]
- Abdel-Monem, M.; Trad, K.; Omar, N.; Hegazy, O.; van den Bossche, P.; van Mierlo, J. Influence analysis of static and dynamic fast-charging current profiles on ageing performance of commercial lithium-ion batteries. Energy 2017, 120, 179–191. [Google Scholar] [CrossRef]
- Marschalko, R.; Elöd, C. PWM AC-to-DC Converter Performances Improvement with the Help of Hysteresis Control. Acta Electroteh. 2004, 45, 561–567. [Google Scholar]
- Hegazy, O.; van Mierlo, J.; Lataire, P. Design and Control of Bidirectional DC/AC and DC/DC Converters for Plug-In Hybrid Electric Vehicles. In Proceedings of the International Conference on Power Engineering, Energy and Electrical Drives (POWERENG), Malaga, Spain, 11–13 May 2011; pp. 1–7. [Google Scholar]
- Barrios, E. Unit 4: Control of the Photovoltaic Conversion Stage; UPNA: Pamplona, Spain, 2015. [Google Scholar]
- Abdel-Monem, M.; Hegazy, O.; Omar, N.; Trad, K.; de Breucker, S.; van den Bossche, P.; van Mierlo, J. Design and Analysis of Generic Energy Management Strategy for Controlling Second-Life Battery Systems in Stationary Applications. Energies 2016, 9, 889. [Google Scholar] [CrossRef]
- Bhardwaj, M. Modeling Bi-Directional Bcuk/Boost Converter for Digiteal Control Using C2000 Microcontrollers; Application Report SPRABX5; Texas Instruments Inc.: Dallas, TX, USA, 2015; pp. 1–12. [Google Scholar]
- Marroyo, L. Three-Phase Inverter: Sizing and Scalar Control; UPNA: Pamplona, Spain, 2015. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Advantages | Disadvantages | Ref. |
|---|---|---|---|
| Conductive | All power levels (slow and fast charging) Simplicity Higher Efficiency Better price Standardization | Manual plug-in Safety risks in wet conditions Difficult automation | [11,12,13,15] |
| Inductive | Convenience for user Weather proof Increase in safety Galvanic isolation More frequent charging is enabled Charging while driving Easier automation | Lower efficiency Slow charging (Level 1 & 2) Low power density More manufacturing complexity More size and cost Specific equipment (no exchangeability) | [11,12,13,16] |
| Type | Advantages | Disadvantages | Ref. |
|---|---|---|---|
| On-board | Lower price (500–3000€) Small size and compact (less than 5 kg) Charging availability Minimal impact to the grid | Slow charging (6–8 h) Power limitation Weight and size constraints | [1,4,11,17,18,19] |
| Off-board | Faster charging (less than 1 h) No size or weigh constraints Enables long distance travelling [19] | Higher price (30,000–160,000€) Redundant power electronics More impact to grid Risk of vandalism to charging stations Cluttering in an urban environment | [1,4,11,17,18,19] |
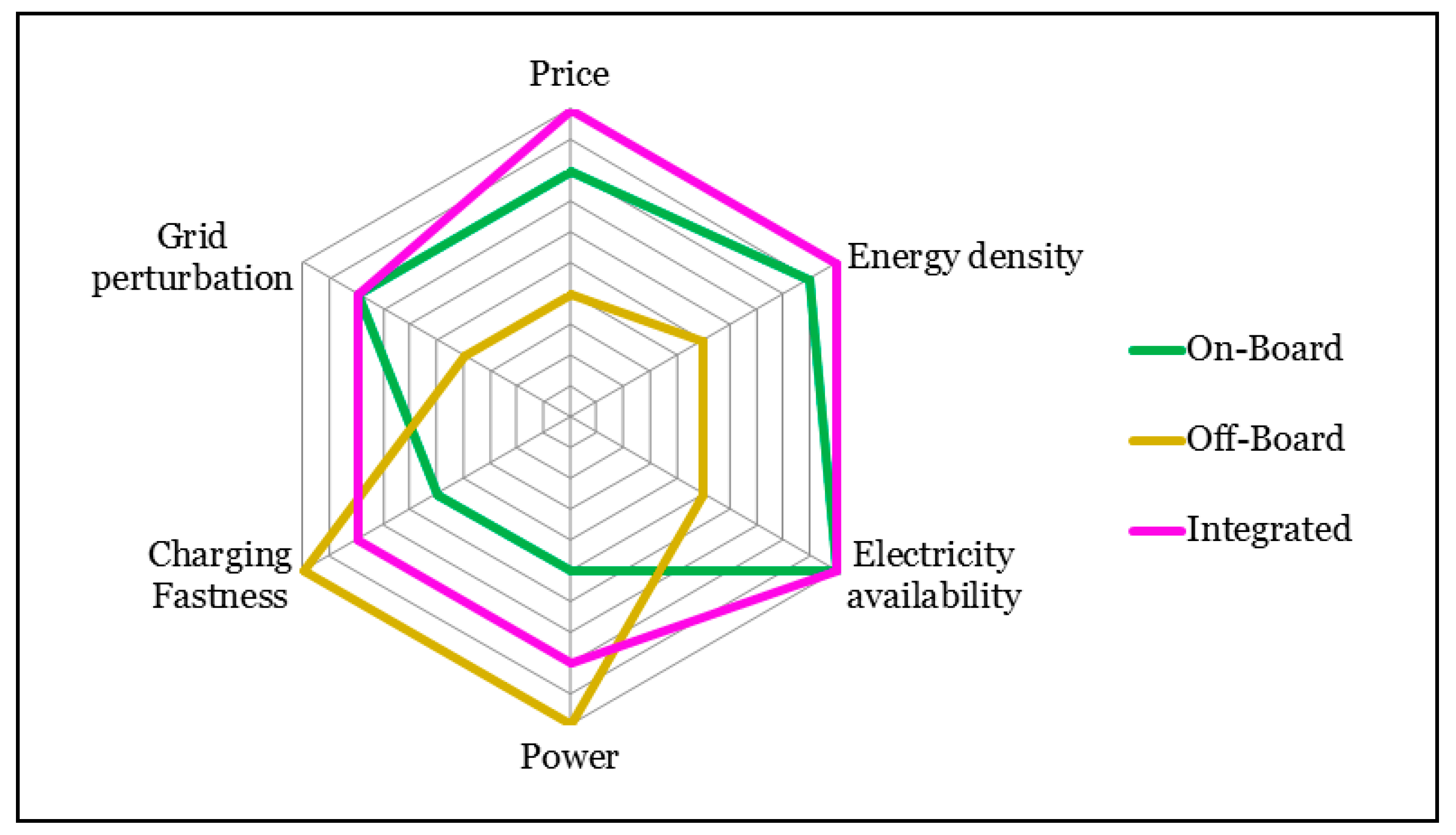
| Integrated | Fast charging (less than 1 h) Charging availability Minimize weigh, volume and cost Bi-directional by design | More copper losses of the motor windings Not optimal inductance for the inverter Control complexity Extra hardware | [11,17,18,19,21] |
| Unidirectional | Bidirectional |
|---|---|
| Simple control | Complex control |
| Less cost (less hardware) | More cost and investment |
| No extra investment needed | More information exchange required; Need of distribution system upgrade |
| Safer | Need of safety measures, anti-islanding protection |
| Less battery degradation | Degradation due to frequent cycling |
| Available for Level 1, 2 and 3 | Expected for Level 2, and 3 |
| Lower efficiency especially at level 1 | Higher efficiency especially at Level 2, and 3 |
| Voltage (reactive power) and frequency (active power in one way) control | Better services; voltage and frequency regulation (down-up), spinning reserves, energy balance, load following, harmonics filtering |
| Topology | Advantages | Disadvantages | Ref. |
|---|---|---|---|
| HBC |
|
| [11,29] |
| FBC |
|
| [10,11,29] |
| BBC |
|
| [23] |
| MLC |
|
| [11,15,23,29] |
| MC |
|
| [11] |
| ADC-GI |
| Compared to a conventional AC/DC converter:
| [30] |
| FBC-DC |
|
| [23] |
| Topology | Advantages | Disadvantages | Ref. |
|---|---|---|---|
| TQC |
|
| [11,28,29] |
| PPC |
|
| [31] |
| IDA |
|
| [11,28,29,32] |
| IDHB |
|
| [28,32,34] |
| SPRT |
|
| [10,33] |
| MIC |
|
| [29] |
| IDA-AC |
|
| [28] |
| Converter | Battery | Grid | |||
|---|---|---|---|---|---|
| Pmax | 3.3 kW | Vcell | 3.6 V | Vrms | 230 V |
| Modulation | Bipolar | Ccell | 10 Ah | Phase | Single |
| Vbus | 400 V | Ns | 102 cells | Fgrid | 50 Hz |
| Lbat | 10 mH | Np | 1 string | ΔImax | 10% |
| Cbus | 42.3 mF | - | - | Lgrid | 4.93 mH |
| AC/DC Converter | DC/DC Converter | Battery | Grid | ||||
|---|---|---|---|---|---|---|---|
| Pmax | 3.3 kW | Pmax | 3.3 kW | Vcell | 3.6 V | Vrms | 230 V |
| Modulation | Bipolar | Vbat | 150 V | Ccell | 10 Ah | Phase | Single |
| Vbus | 400 V | ΔVmax | 0.5 V | Ns | 38 cells | Fgrid | 50 Hz |
| ΔVmax | 2% | Cbat | 0.557 mF | Np | 3 | ΔImax | 10% |
| Cbus | 3.28 mF | ΔImax | 20% | - | - | Lgrid | 4.93 mH |
| - | - | Lbat | 1.136 mH | - | - | - | - |
| Converter | Battery | Grid | |||
|---|---|---|---|---|---|
| Pmax | 22 kW | Vcell | 3.6 V | Vrms, phase | 230 V |
| Modulation | Unipolar | Ccell | 10 Ah | Phase | Three |
| Vbus | 700 V | Ns | 178 cells | Fgrid | 50 Hz |
| ΔVmax | 2% | Np | 4 strings | ΔImax | 10% |
| Cbus | 2.494mF | - | - | Lgrid | 1.1 mH |
| Rbus | 286.4 kΩ | - | - | - | - |
| AC/DC Converter | DC/DC Converter | Battery | Grid | ||||
|---|---|---|---|---|---|---|---|
| Pmax | 22 kW | Pmax | 22 kW | Vcell | 3.6 V | Vrms, phase | 230 V |
| Modulation | Unipolar | Vbat | 150 V | Ccell | 10 Ah | Phase | Three |
| Vbus | 700 V | ΔVmax | 0.5 V | Ns | 38 cells | Fgrid | 50 Hz |
| ΔVmax | 2% | Cbat | 0.133 mF | Np | 17 | ΔImax | 10% |
| Cbus | 2.494 mF | ΔImax | 5% | - | - | Lgrid | 1.1 mH |
| Rbus | 286.4 kΩ | Lbat | 1.186 mH | - | - | - | - |
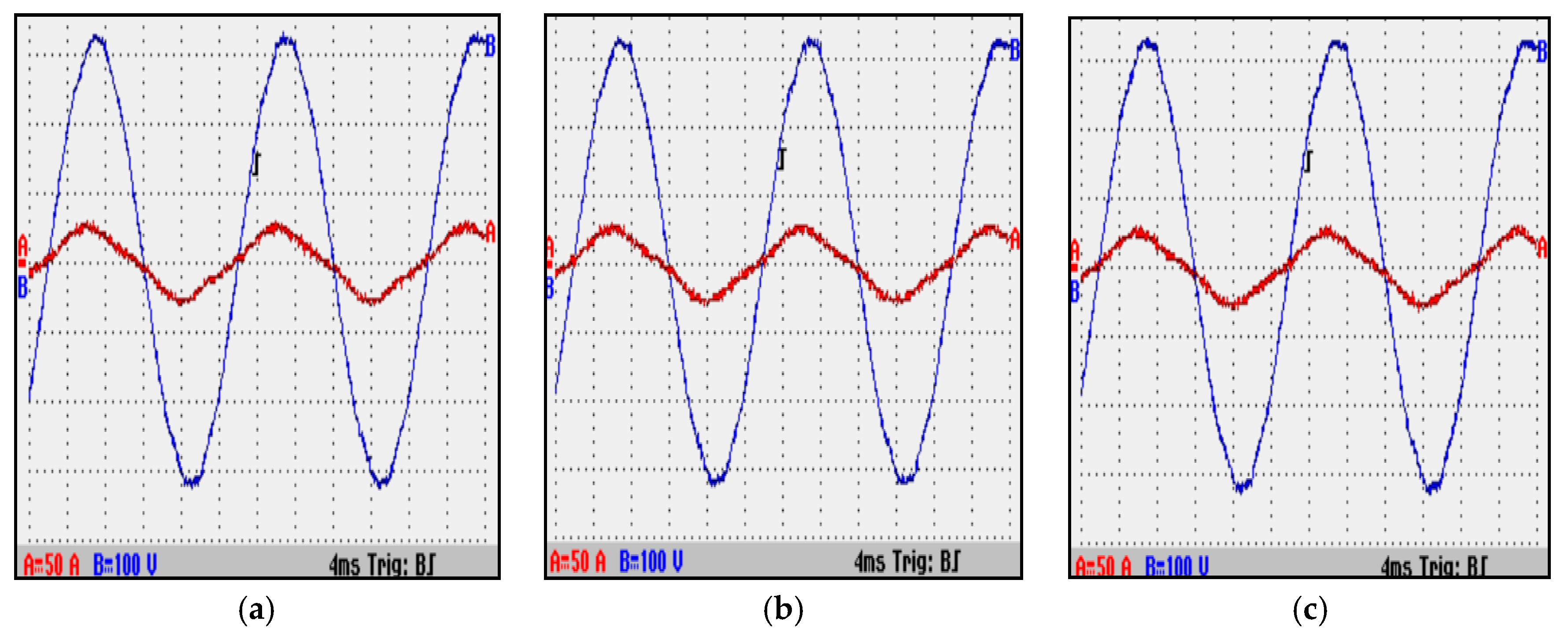
| SoC (%) | P (W) | S (VA) | W (Var) | Vrms (V) | Irms (A) | PF | DF | Time |
|---|---|---|---|---|---|---|---|---|
| 17 | 3797 | 3855 | −648 | 225 | 17 | 0.985 capacitive | 1.25 | 12:50 |
| 31 | 3661 | 3715 | −631 | 225.6 | 16.44 | 0.985 capacitive | 1.1 | 13:15 |
| 42 | 3741 | 3797 | −655 | 226.1 | 16.77 | 0.985 capacitive | 1.1 | 13:35 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Garcés Quílez, M.; Abdel-Monem, M.; El Baghdadi, M.; Yang, Y.; Van Mierlo, J.; Hegazy, O. Modelling, Analysis and Performance Evaluation of Power Conversion Unit in G2V/V2G Application—A Review. Energies 2018, 11, 1082. https://doi.org/10.3390/en11051082
Garcés Quílez M, Abdel-Monem M, El Baghdadi M, Yang Y, Van Mierlo J, Hegazy O. Modelling, Analysis and Performance Evaluation of Power Conversion Unit in G2V/V2G Application—A Review. Energies. 2018; 11(5):1082. https://doi.org/10.3390/en11051082
Chicago/Turabian StyleGarcés Quílez, María, Mohamed Abdel-Monem, Mohamed El Baghdadi, Yang Yang, Joeri Van Mierlo, and Omar Hegazy. 2018. "Modelling, Analysis and Performance Evaluation of Power Conversion Unit in G2V/V2G Application—A Review" Energies 11, no. 5: 1082. https://doi.org/10.3390/en11051082