1. Introduction
Magnetometers are sensors for magnetic field detection, which are often employed in industrial, oceanographic and biomedical fields. They are key sensors in geomagnetic field measurement, magnetic pattern imaging, mineral deposit detection, etc. [
1]. In some biomedical applications, with the high requirements in sensitivity and accuracy, magnetometers should also be small enough and have low power consumption, whereas the performances of most present sensors are not satisfactory. MEMS technology provides an opportunity to solve this problem.
Currently, the most popular principles in MEMS magnetometers are the Hall Effect, magneto-resistance and the fluxgate effect [
2]. However, Hall Effect magnetometers have low sensitivity and large temperature shifts; the sensors based on magnetoresistance are only appropriate to measure intense magnetic fields and fluxgate effect magnetometers are very difficult to fabricate. In this paper, a novel MEMS torsional resonant magnetometer based on the Lorentz Force principle is put forward. Such a sensor does not require magnetic materials, which makes it easier to fabricate by MEMS process. The magnetometer does not need an additional Au electrode on its surface and that the multi-turn excitation coil increase its driving torque. Compared with the MEMS surface resonant magnetometer developed by the Qinetiq Ltd. [
3], our torsional structure has a much larger Quality Factor and excitation torque, which can magnify the vibration amplitude and facilitate the output signal detection. In the case of the Micromechanical Resonant Magnetic Sensor made by the University of California at Los Angeles, the piezoresistive sensing method had been employed for the detection of the vibration amplitude [
4]. Compared with the capacitive displacement detection used in our design, such a method is sensitive to temperature, which limits its application range. In addition, compared with the magnetometer realized by Delft University of Technology [
5], our fabrication process is quite different. Also the new structures such as low-resistivity silicon resonator and multi-turn excitation coil are put forward, by which the sensor’s performance is greatly improved.
2. Operation Principle
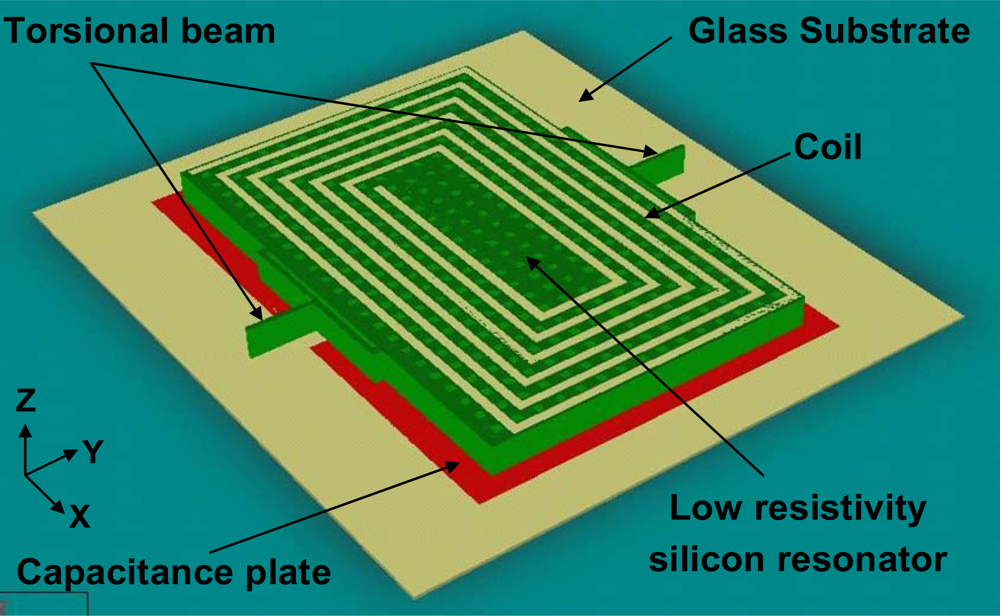
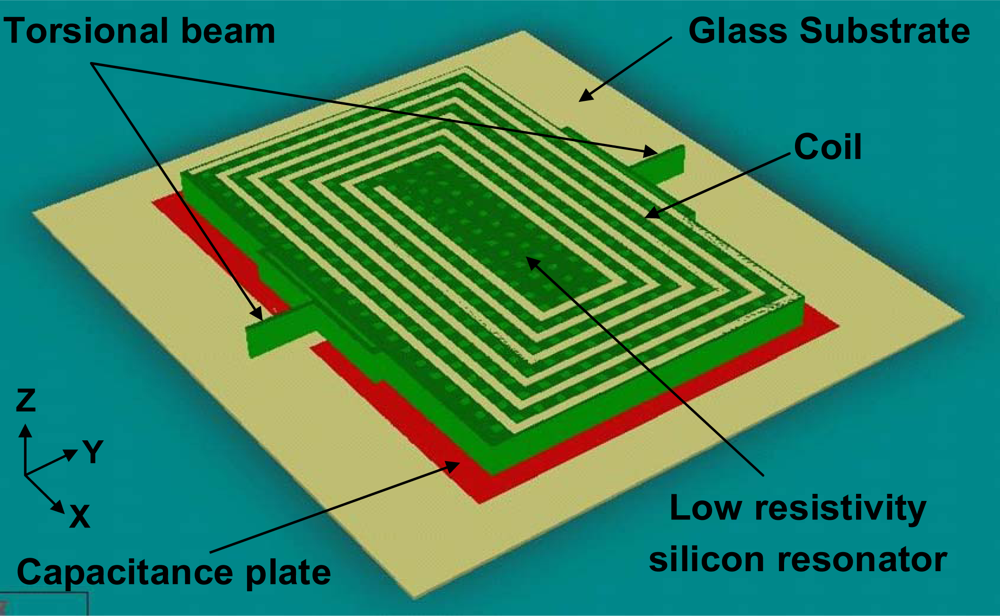
A low-resistivity silicon structure is suspended over the glass substrate by torsional beams, as indicated in
Figure 1. Above the silicon structure, a 1 μm thick, 50 μm wide multi-turn excitation coil is deposited. The free ends of the torsional beams are fixed by anchors bonded onto the glass substrate. The Au capacitance plates are fabricated directly onto the glass substrate to form the capacitor with the low-resistivity silicon resonator, of which the resistivity is between 0.001 Ω·cm and 0.004 Ω·cm.
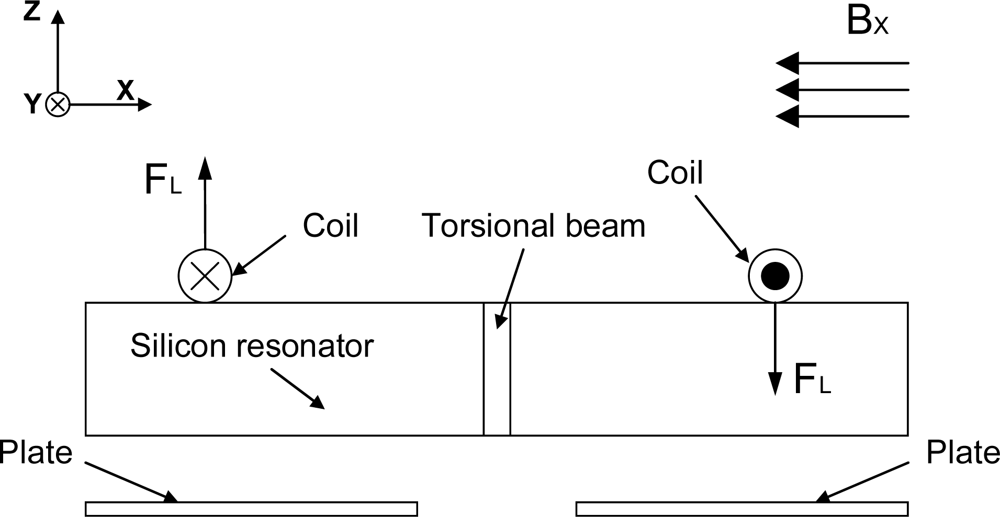
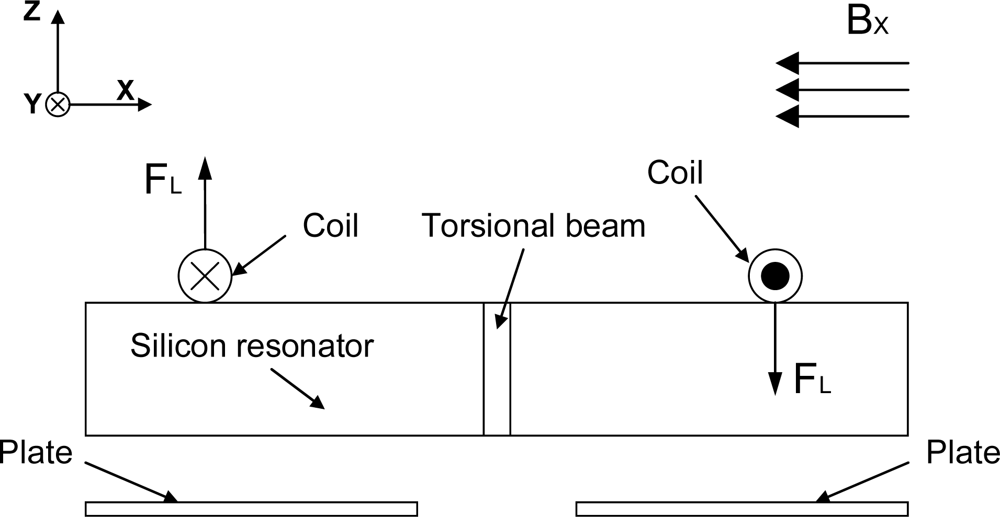
The operation principle is illustrated in
Figure 2. If a DC current
I is introduced into the excitation coil and a magnetic flux-density
Bx in x-direction is presented, for one turn of the excitation coil with length
Lc in y-direction, the Lorentz forces perpendicular to the silicon plane are:
The Lorentz forces are generated on both sides of the resonator with opposite directions. Therefore the torque caused by the Lorentz forces is of the same direction, which twists the torsional beams.
If a sinusoidal current shown in (2) passes through the excitation coil instead of a DC current, the silicon resonator will vibrate around the torsional beams due to the alternating directions of the Lorentz force
FL in (3):
When the frequency
f of the current is equal to the resonant frequency of the silicon resonator, the vibration amplitude will dramatically increase due to the resonance and the high quality factor of the structure. Then this vibration amplitude will be converted into the differential change of the two sensing capacitances as shown indicated in
Figure 2. Here, a capacitance detection circuit could be used to measure the capacitance change that reflects the value of the magnetic flux-density [
3].
For the Lorentz Force Magnetometer, the input is the magnetic flux-density
Bx in x-direction and the output is the capacitance change Δ
C. The transfer function can be expressed as in (4):
Here,
SM,
Sφ and
SC respectively stand for the transfer function from the magnetic flux-density
B to the excitation torque
M, from the excitation torque
M to the torsional angle
φ, and from the torsional angle
φ to the capacitance change Δ
C. When the structural parameters of the resonant magnetometer are determined, it can be proved that
SM,
Sφ and
SC are approximately constant under small deflection condition [
6]. Therefore, the capacitance change Δ
C has a linear relationship with the magnetic flux-density
Bx. The output signal of the capacitance detection circuit can accurately represent the magnetic flux-density
Bx in x-direction when the torsional angle of the resonator is in an appropriate range. For instance, when the resonator surface area
S is 3,000 μm × 2,000 μm and the capacitance plate distance
d0 is 15 μm, the linearity of the sensor can be within 1.0% when the rotation angle does not exceed 6 × 10
−4 rad.
4. Design and Simulation
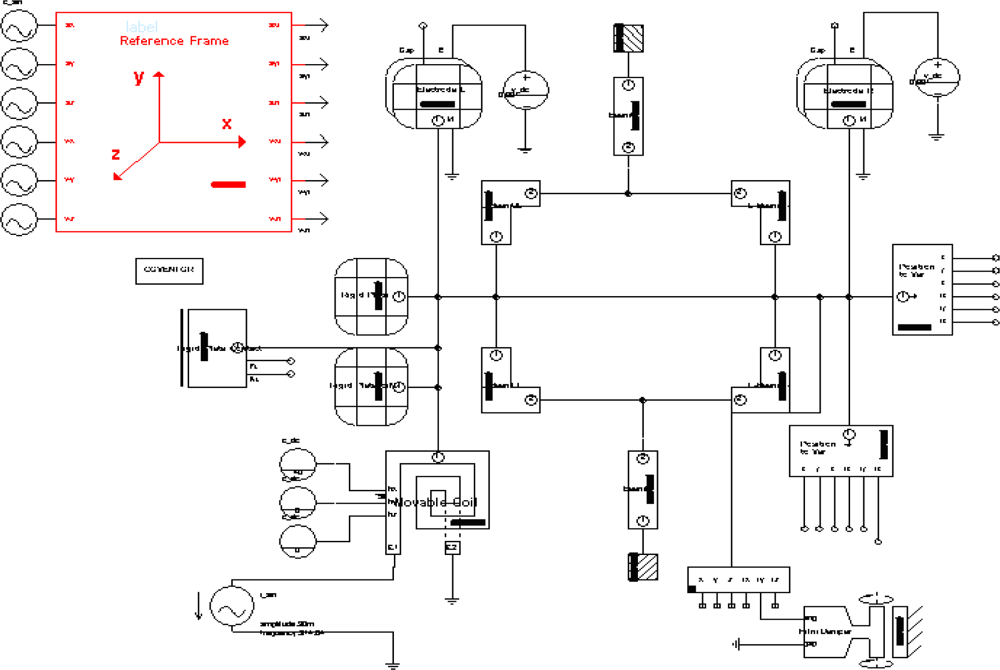
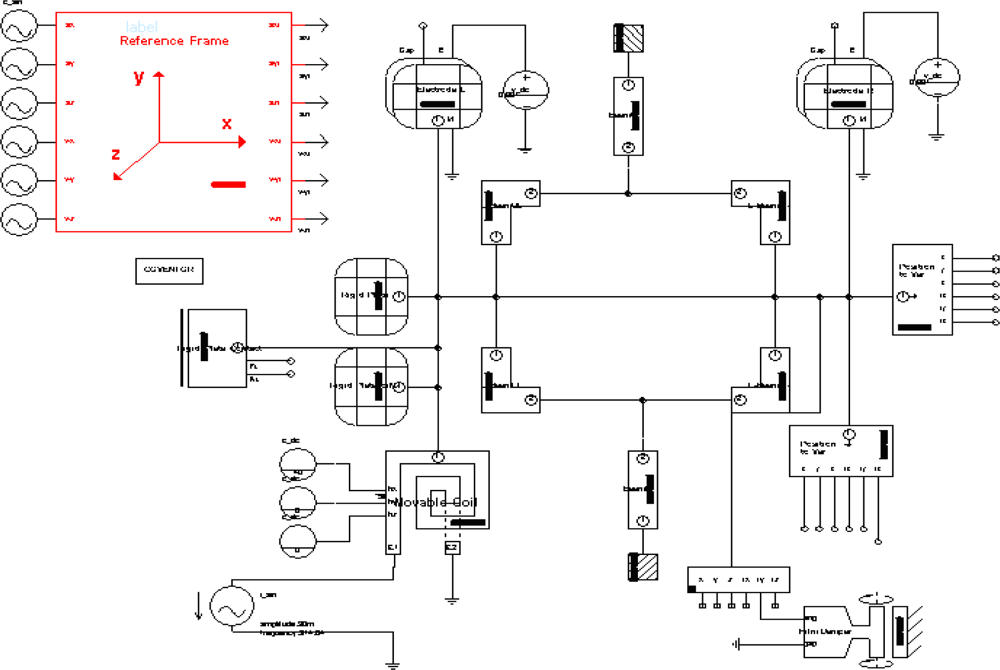
The simulation of the MEMS torsional resonant magnetometer is performed by the ARCHITECT SaberSketch editor in CoventorWare, in which the electrical, electro-mechanical, mechanical and magnetic parts build the magnetometer structure together, as indicated in
Figure 5. Using the ARCHITECT SaberSketch, we can directly simulate the magnetometer’s performance and observe the output signals when doing a parametric study. This simulation process avoids the FEM meshing method, which largely increases the simulation speed.
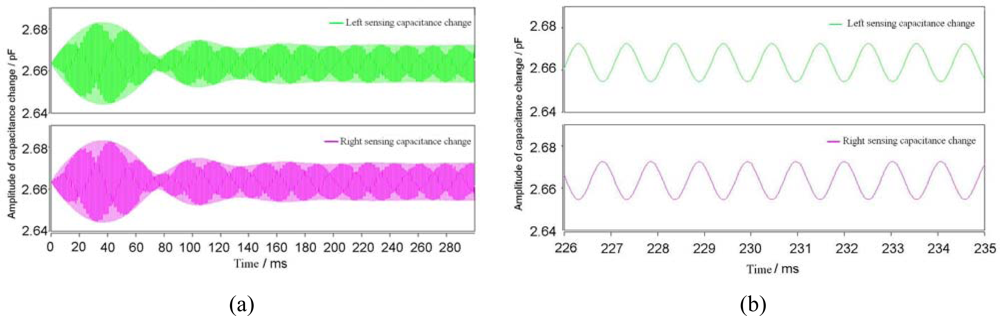
In this paper, the simulation aims to demonstrate the working principle, examine its sensitive direction, optimize the structure dimensions and estimate the influence of the damping effect of the air gap between the resonator and the capacitance plate. To demonstrate the operation principle of the magnetometer and the validity of the simulation model, a 30 mA amplitude AC current is introduced into the excitation coil. When the horizontal magnetic flux-density to be measured is 50 μT, the simulation results of the two sensing capacitances are illustrated in
Figure 6.
Figure 6(a) shows the two sensing capacitances at 300 ms from the time when the horizontal magnetic flux-density is applied. The amplitude of the sensing capacitance change Δ
C becomes stable after about 150 ms. The transition time and overshoot shown in
Figure 6(a) are related to the system damping ratio and the damping from environment, such as the air.
Figure 6(b) shows the left and right sensing capacitances by magnifying the time interval. The curves of the two sensing capacitances have the same amplitude but reverse phase, which demonstrates the differential capacitance change.
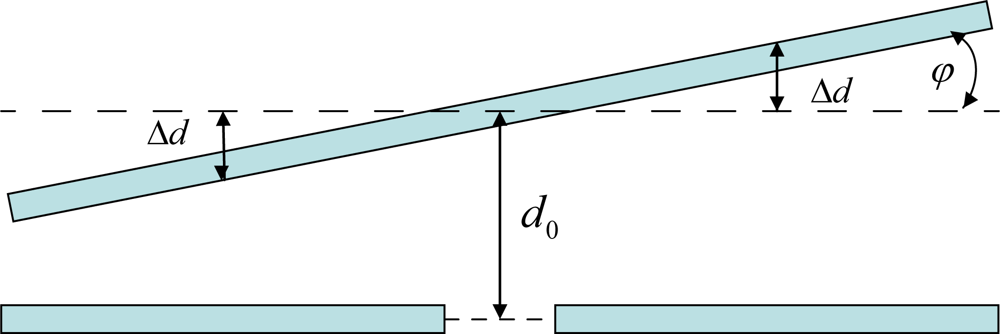
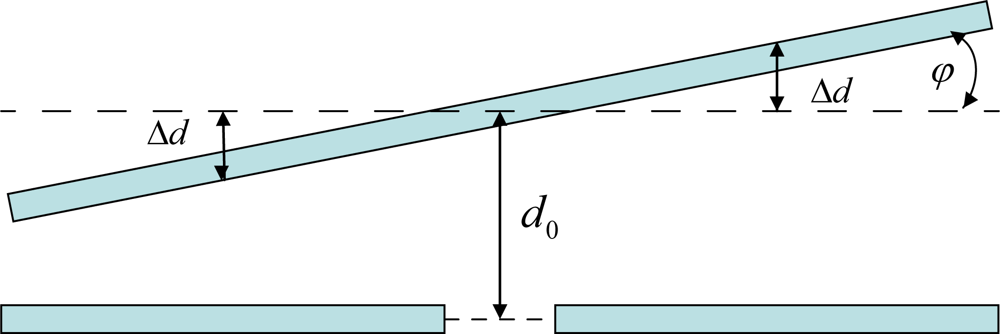
When designing the structure of the MEMS torsional resonant magnetometer, some key parameters that largely influence the device performance should be first determined. Most of these parameters are set up by resolution and accuracy requirements or fabrication and power consumption restrictions. The differential change of the two sensing capacitances is illustrated in
Figure 7. Formula (5) shows the capacitance change in the case of small deflection [
6], where
ε denotes dielectric constant,
S is the resonator surface area,
L is the resonator length,
W is the resonator width,
d0 is the capacitance plate distance and Δ
d is the average resonator displacement in z-direction.
According to (5),
S should be enlarged and
d0 should be decreased to get high amplitude of Δ
C. However, since the low-resistivity silicon needs to be anodic bonded with the Pyrex glass, the high voltage applied during this process may generate breakdown of the air between the low-resistivity silicon and the capacitance plates. In addition, the CMP process that is used to decrease the thickness of the resonator may crush the silicon wafer because of the pressure added on the surface. Due to such restrictions, we set the minimum
d0 to 10 μm and the maximum
S to 6 mm
2. To reach the maximum excitation torque, The
W/L value needs to be in the range of
1 < W/L < 2 [
5].
4.1. Resonant Frequency
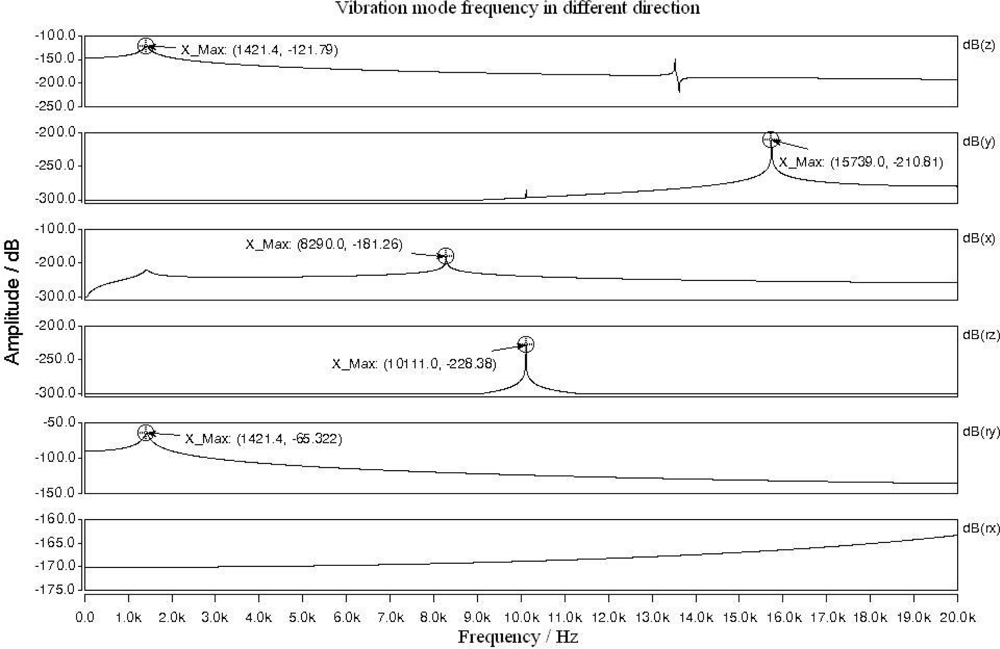
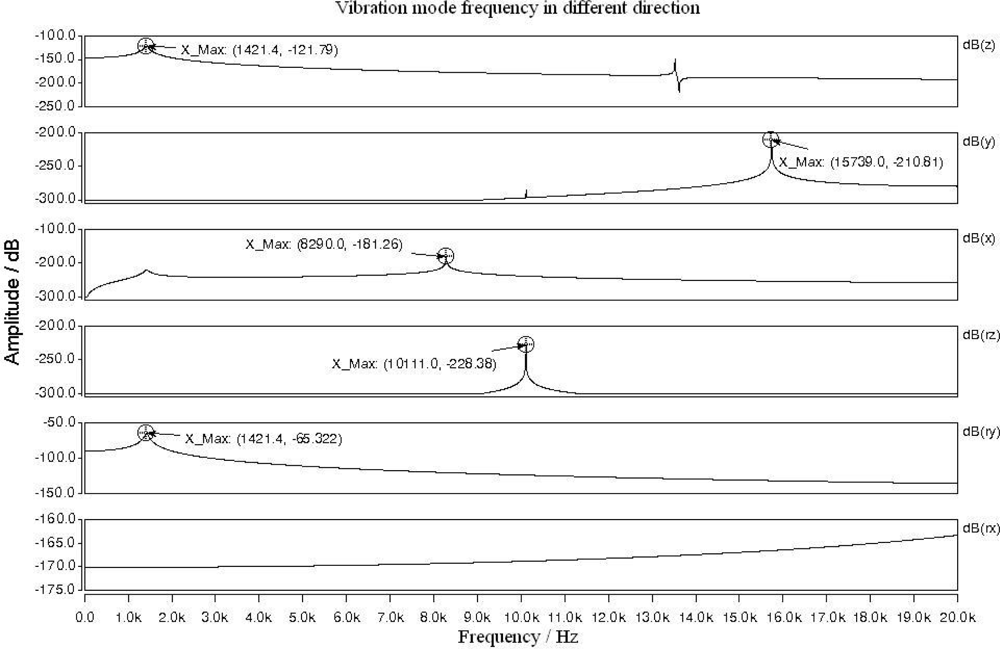
By examining the first-order resonant frequencies and the intervals between the resonant frequencies in different vibration modes, the sensitive direction of the sensor can be determined. According to the magnetometer’s working principle, the first-order vibration mode of the silicon resonator should be in ry-direction (rotating the y-axis). When the torsional beam length is 400 μm, beam width 20 μm and silicon thickness 60 μm, the simulated vibration modes of the silicon resonator are illustrated in
Figure 8. When the silicon resonator is vibrating in ry-direction, its ends will have displacement in both ry-direction and z-direction. Therefore the first-order resonant frequency in the two directions have the same value of 1421.4 Hz as shown in
Figure 8. The resonant frequencies in x-, y- and rz-directions are higher than 8 kHz, which are far from the ry-direction resonant frequency and will not influence the operation vibration mode. The simulation result proves that the designed magnetometer is only sensitive to the magnetic flux-density
Bx in the horizontal x-direction, which makes the torsional structure vibrating in ry-direction.
The theoretical resonant frequency in ry-direction can be obtained from (6):
Herein ρSi = 2300 kg/m3 denotes the low-resistivity silicon density, G = 6.9 × 1010 Pa is the silicon shear modulus, w is the beam width and l is the beam length. Based on the parameters above, the calculated resonant frequency is 1,333.7 Hz. The tested resonant frequency of the fabricated magnetometer with the same dimensions is around 1,320 Hz, which is in accordance with the simulation and theoretical data.
4.2. Structure Parameters
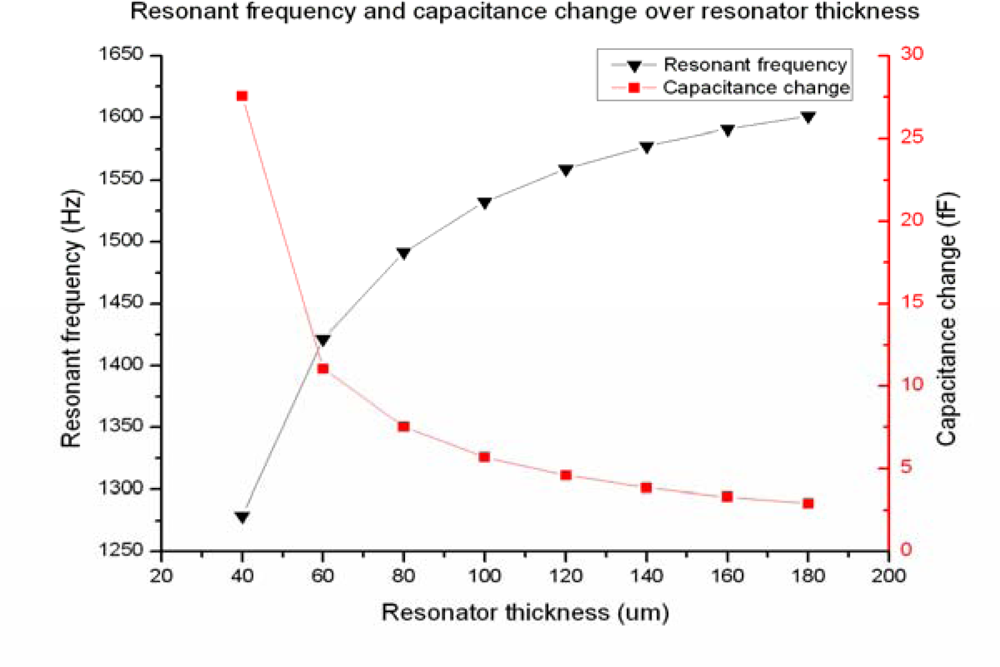
This simulation investigates the influence of the resonator thickness to the resonant frequency and the output capacitance change Δ
C, which helps to optimize the structure dimensions. The elastic coefficient of the torsional beam can be written as:
When the resonator thickness is reduced, the elastic coefficient decreases and the beams are easier to twist, which would undoubtedly generate a higher Δ
C.
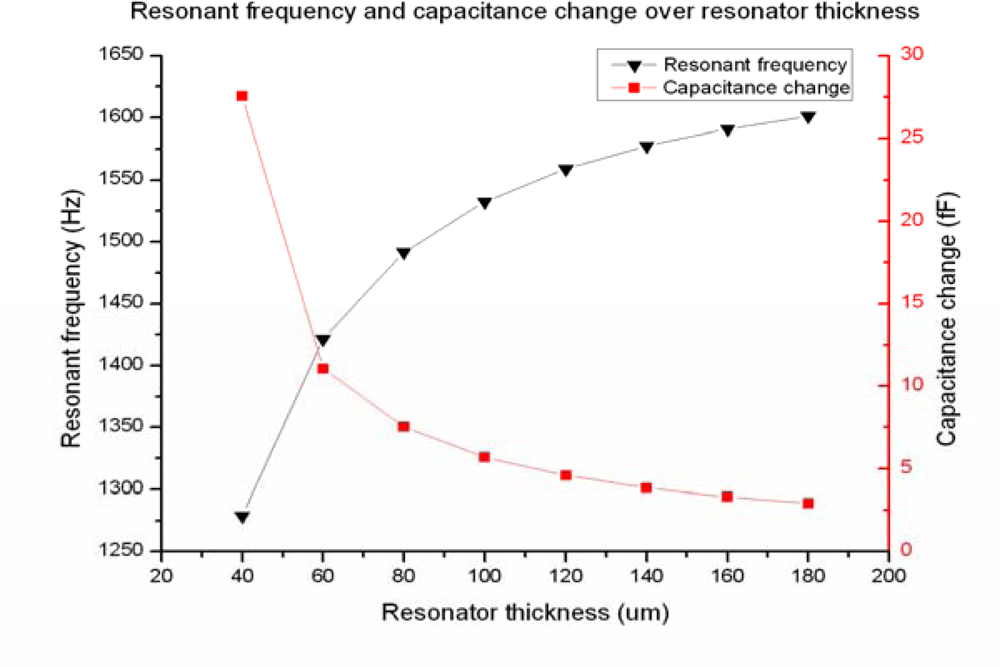
Figure 9 shows the resonant frequency and Δ
C over different resonator thickness, applying a 50 μT magnetic flux-density and 30 mA amplitude AC current. When the silicon resonator is thinned, the resonant frequency decreases but the Δ
C output increases, both of which have a nonlinear relationship with the resonator thickness. In addition, not only does thin resonator increase the amplitude of Δ
C as illustrated in
Figure 9, but also it simplifies the fabrication process, especially in BOSCH etching. This will largely increase the fabrication quality of our MEMS based magnetometer.
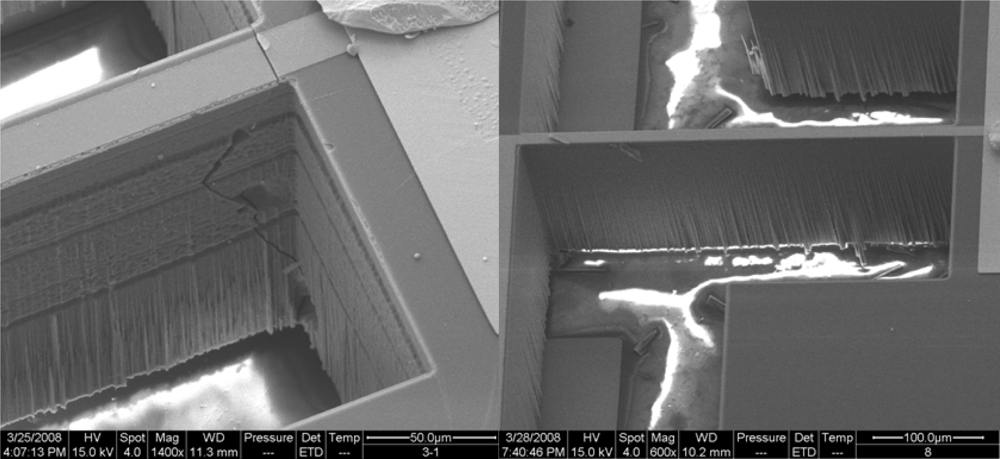
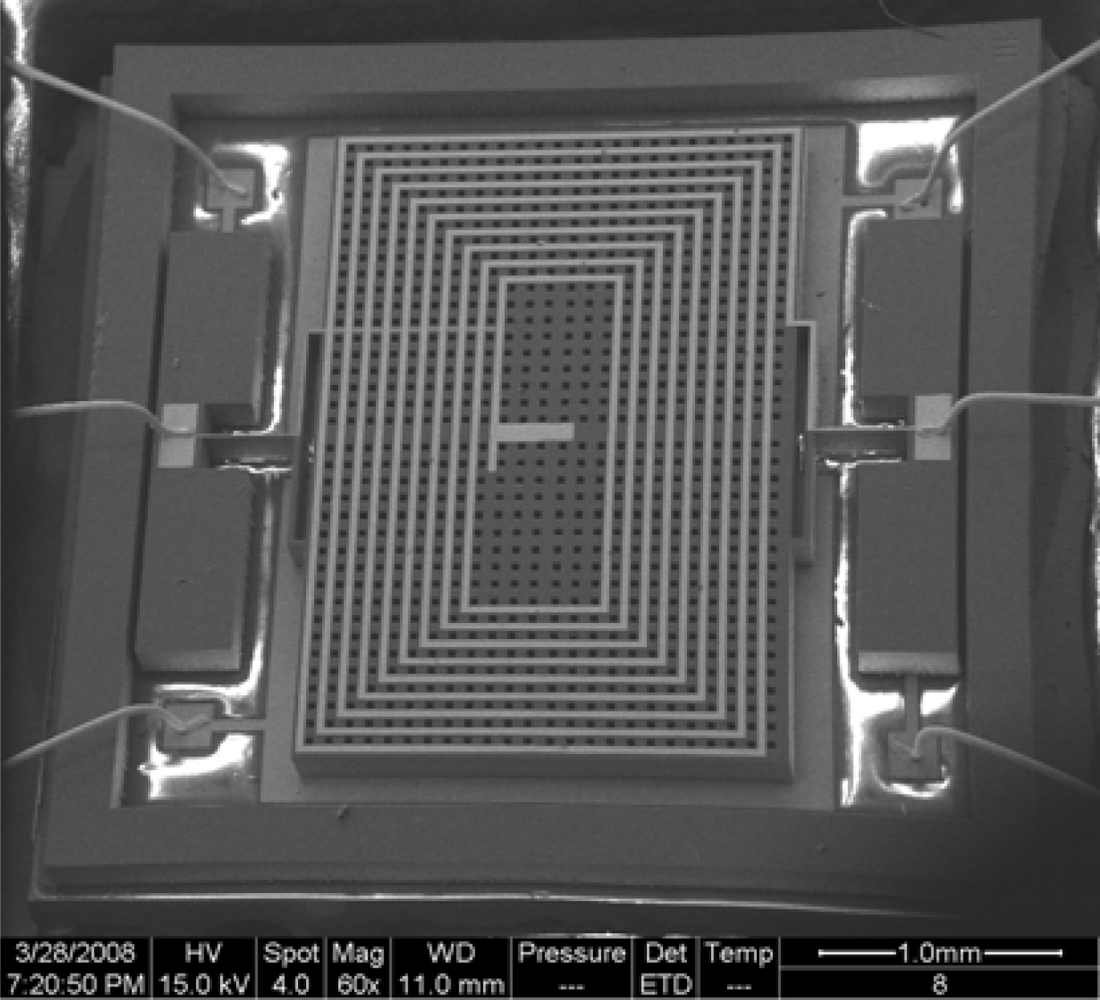
Figure 10 shows the lateral quality of the fabricated magnetometer when the resonator is around 180 μm thick. The jagged lateral surface of the torsional beams will significantly influence the mechanical properties. Therefore thin resonator would not challenge the BOSCH etching process and thus guarantee the good mechanical properties. However, thin resonator will decrease the resonant frequency as indicated in
Figure 9, which will generate more noise in low frequency. In addition, the silicon wafer is also easy to break during the CMP process. In view of these opposite impacts of the resonator thickness, the 60 μm thickness is chosen as the proper dimension.
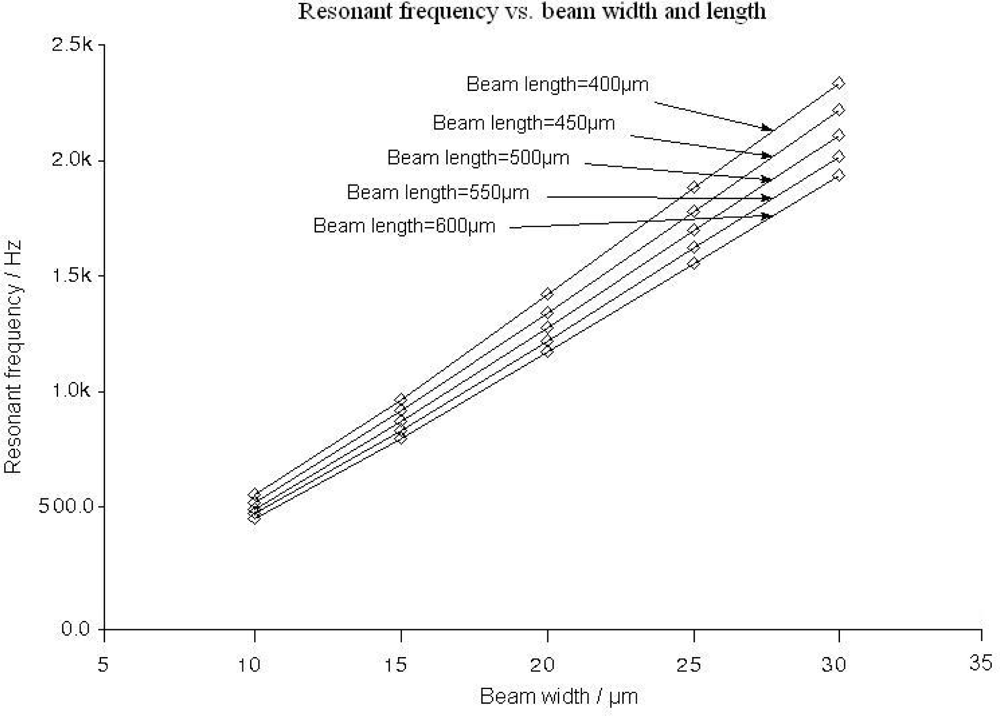
According to (7), in order to decrease the elastic coefficient
k and improve the sensitivity, long and narrow torsional beams are required. However, this requirement will also decrease the resonant frequency, as shown in
Figure 11. Considering the noise in low frequency, it is wise to select the value of
l and
w with the resonant frequency higher than 1 kHz.
For the fabricated sensor with the beam length
l = 500 μm, the beam width
w = 20 μm and the resonator thickness = 60 μm, the tested resonant frequency is around 1,320 Hz, which agrees with the simulation results in
Figure 11. In addition, the performance test results by the capacitance detection circuit, which will be mentioned later, indicate that the amplitude of the output capacitance change is enough to reach a high sensitivity with the structural parameters mentioned above.
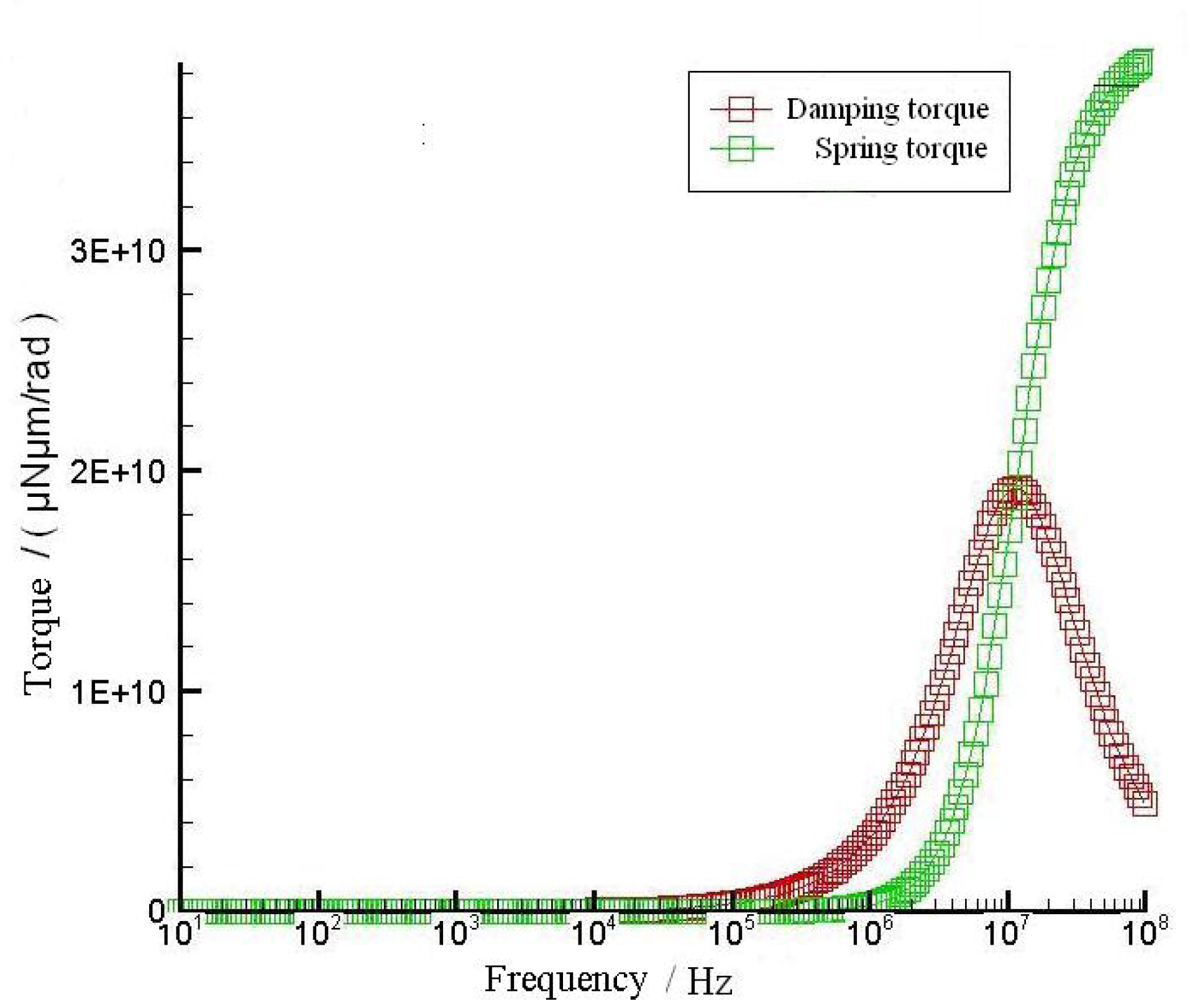
4.3. Squeeze Film Damping Effect
We have estimated the influence of the squeeze film damping effect and investigated the necessity for the sensor to work in a vacuum environment. The thickness of the air layer between the resonator and substrate is in the order of tens of microns and the area is around 3,000 μm × 2,000 μm. Such an air gap will exert a torque on the plate. This torque has components both in-phase and out-of-phase with the velocity of the resonator. The velocity in-phase component is the damping torque, and the out-of-phase component is the spring torque. Both terms are frequency-dependent and deduced from appropriate physical models of fluids in the regions near the resonator [
7–
8]. The frequency characteristics of the damping torque and spring torque are illustrated in
Figure 12, which is achieved by the CoventorWare.
As
Figure 12 indicates, the spring torque rises rapidly as the frequency increases. The air captured in the cavity between the resonator and glass substrate is squeezed. Because there is no real closed cavity in this case, at low frequencies air can escape with little resistance and the torque is small. At high frequencies the air is held captive by its own inertia. Essentially, there is not enough time for the air to move out of the way as the resonator oscillates. Therefore the air compresses, resulting in a spring torque. Since the damping torque itself is caused by viscous stresses, if the gas compresses and does not move much, the damping torque will be lower. This explains why the damping torque gets smaller as the frequency increases. According to the above analyses, the squeeze film damping effect of such a thin, large-area air layer would decrease the vibration amplitude, especially in high frequency. To reduce this negative effect, some damping holes are etched through the silicon resonator, which allow the escape of the air captured between the resonator and the glass substrate. These damping holes are essential even if they will lower the value of initial capacitance which may decrease the sensor’s resolution.
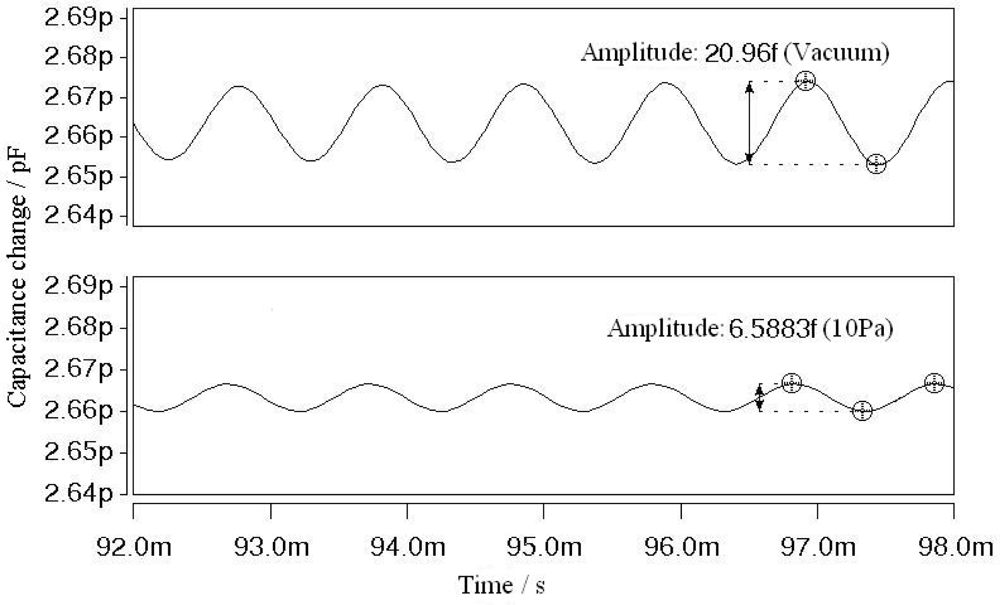
To further reduce the squeeze film damping effect of the air layer, the sensor should be packaged in an approximate vacuum environment.
Figure 13 shows the simulation results of the Δ
C output in a 10 Pa pressure environment comparing with that in pure vacuum. The Δ
C output of the approximately vacuum packaged sensor is 6.5883 fF, which is 31% of the Δ
C output in pure vacuum environment without squeeze film damping effect. When the magnetometer operates in a normal environment pressure, the Δ
C output would decrease more significantly. Therefore it is essential for the magnetometer to work in a vacuum environment.
4.4. Driving and Detection Circuit
The schematic diagram of the driving and detection circuit of the magnetometer is illustrated in
Figure 14. The sinusoidal signal
fL generated by the driving circuit is applied into the excitation coil. The
fL has the same frequency as the structure’s resonant frequency, which resonates the magnetometer and periodically changes the sensing capacitances. The high-precision and low-noise pre-amplification circuit is employed to convert the weak signal of the sensing capacitance to small voltage signal. In this process, the high-frequency carrier
fH is applied to suppress the low-frequency noise. By the follow-up amplification, full-wave rectification and low-pass filter circuit, the AC small voltage is converted into DC voltage, whose amplitude reflects the magnetic flux-density to be measured.
6. Conclusions
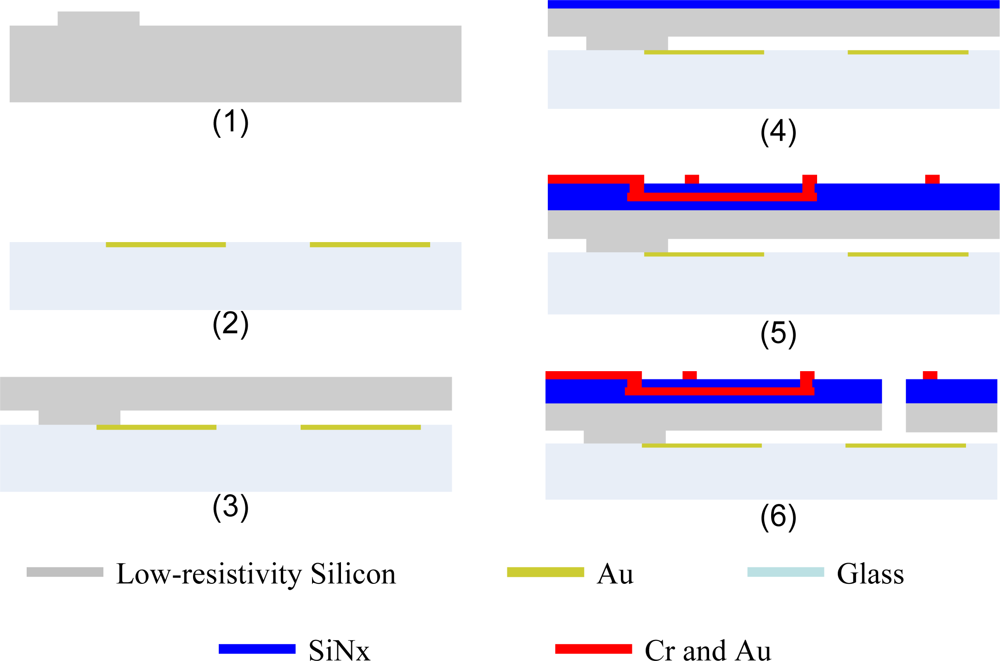
A torsional resonant magnetometer has been designed and fabricated using conventional MEMS technology and a silicon-to-glass anodic bonding process. The vibration amplitude of the silicon resonator, which is proportional to the value of the magnetic flux-density, is converted into the differential change of sensing capacitances. The low-resistivity silicon resonator directly acts as the capacitance electrode, which largely simplifies the fabrication process. By choosing optimal parameters and taking into account the squeeze film damping effect of the air gap, the sensitivity and resolution of the magnetometer is largely increased. The driving and detection circuit is designed for the magnetometer, which can be integrated with the sensor to fabricate the prototype. According to the performance test of the prototype in a 10 Pa vacuum environment, the Quality factor reaches over 2,500, the sensitivity reaches 481 mV/μT and the resolution can be increased to 30 nT in the linear measurement range from 3,000 nT to 30,000 nT. With such a high sensitivity and resolution, the magnetometer can be applied in the geomagnetic field measurement to assist the attitude control of micro aircrafts. To further improve the magnetometer’s performance, future works could be focused on studying the non-linear response and increasing the sensor’s reliability and consistency.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}