Surface Generated Acoustic Wave Biosensors for the Detection of Pathogens: A Review

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
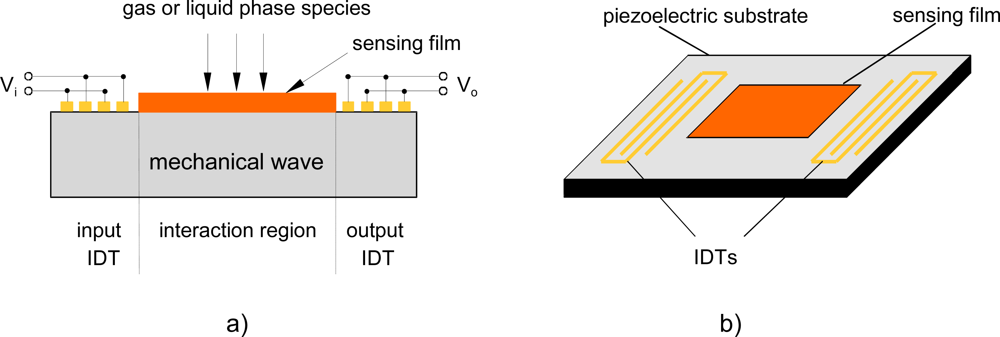
2. SGAW Basic Operation
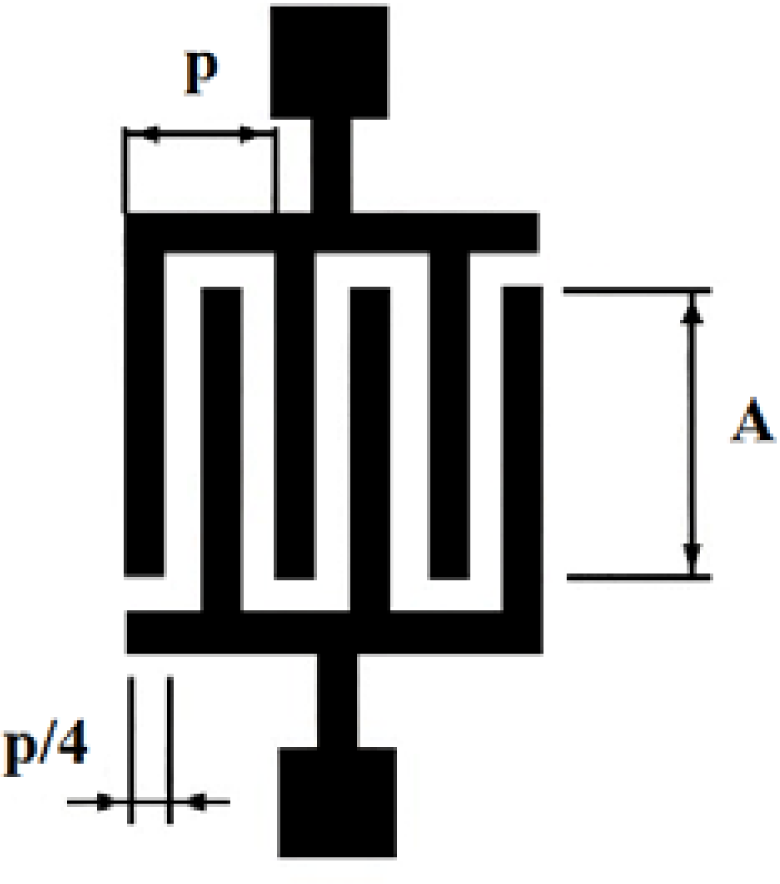
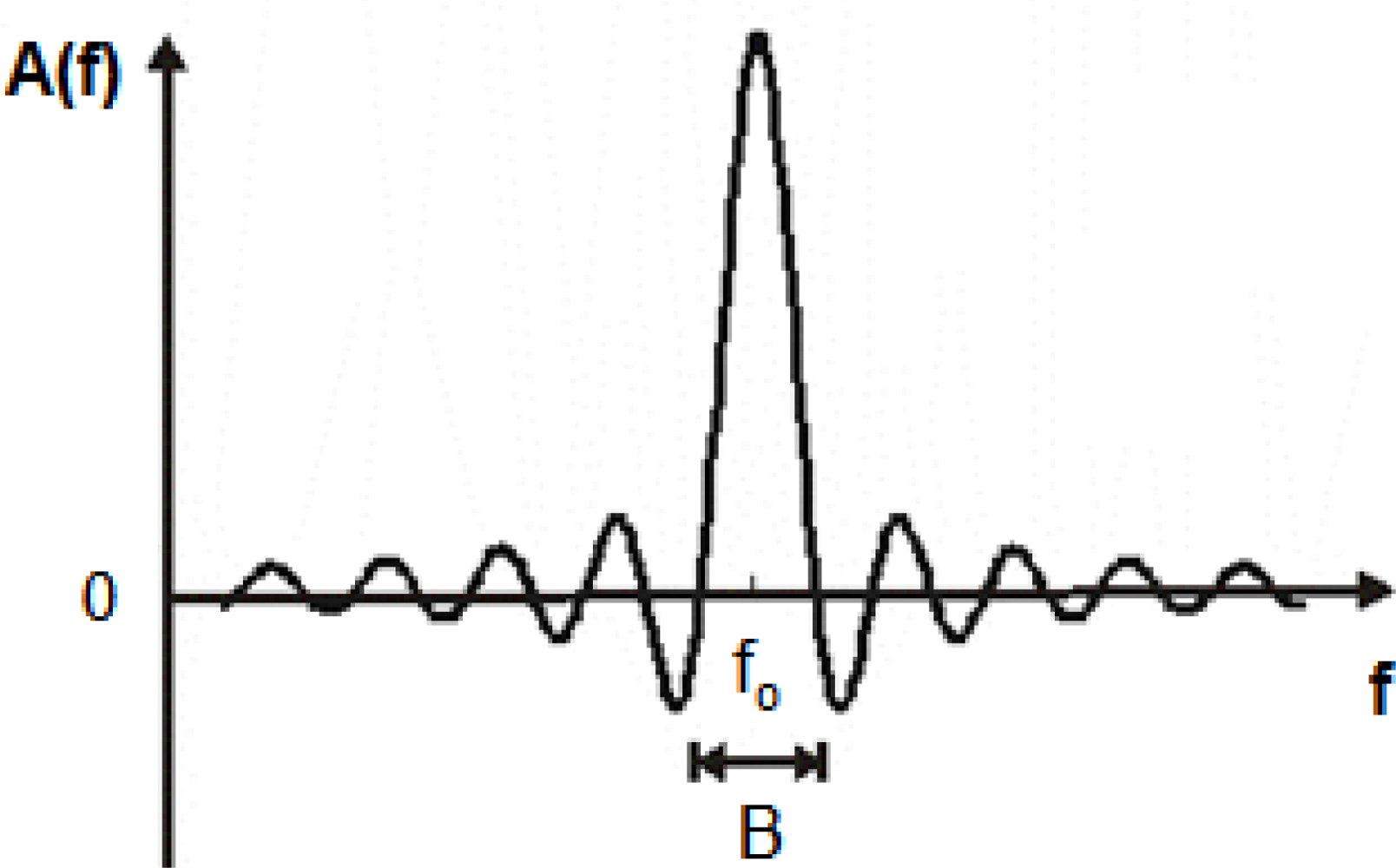
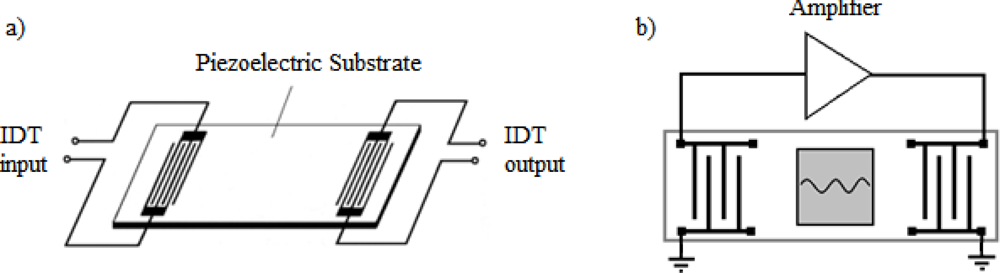
2.1. Interdigital Transducers (IDTs)
2.2. SGAW Device Electronic Configurations
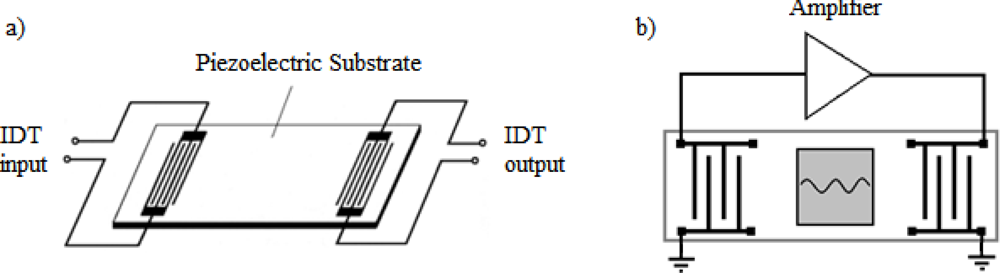
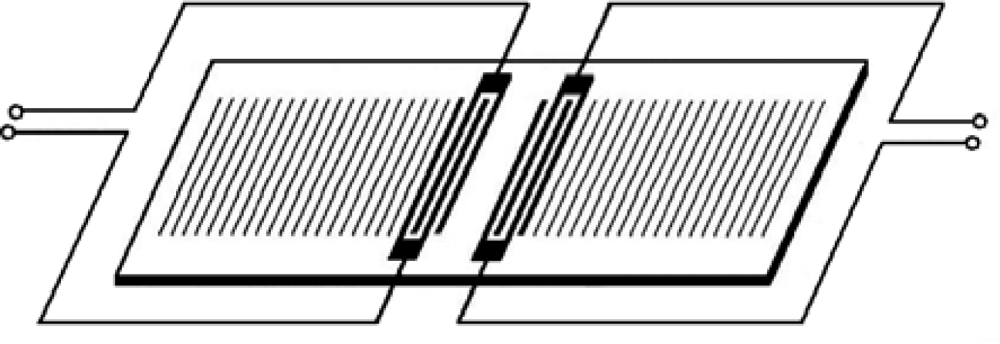
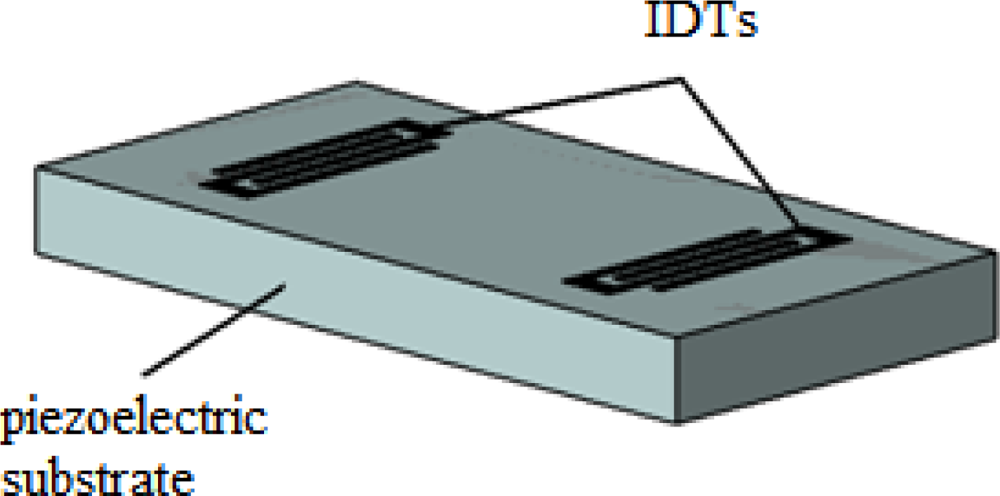
2.2.1. Delay line - two IDTs configuration
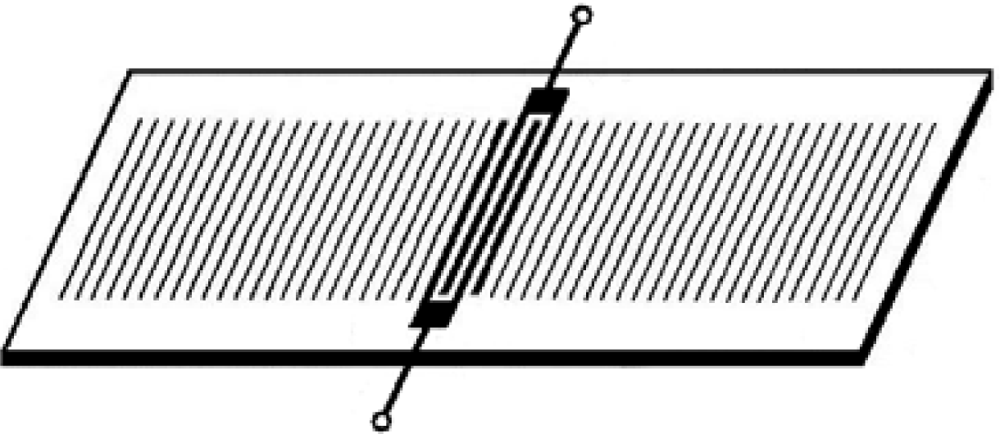
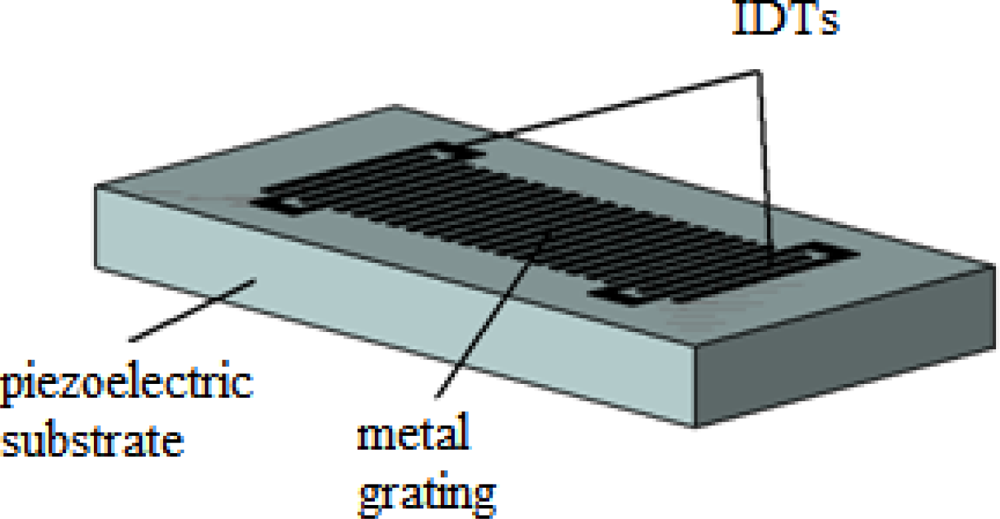
2.2.2. Resonators
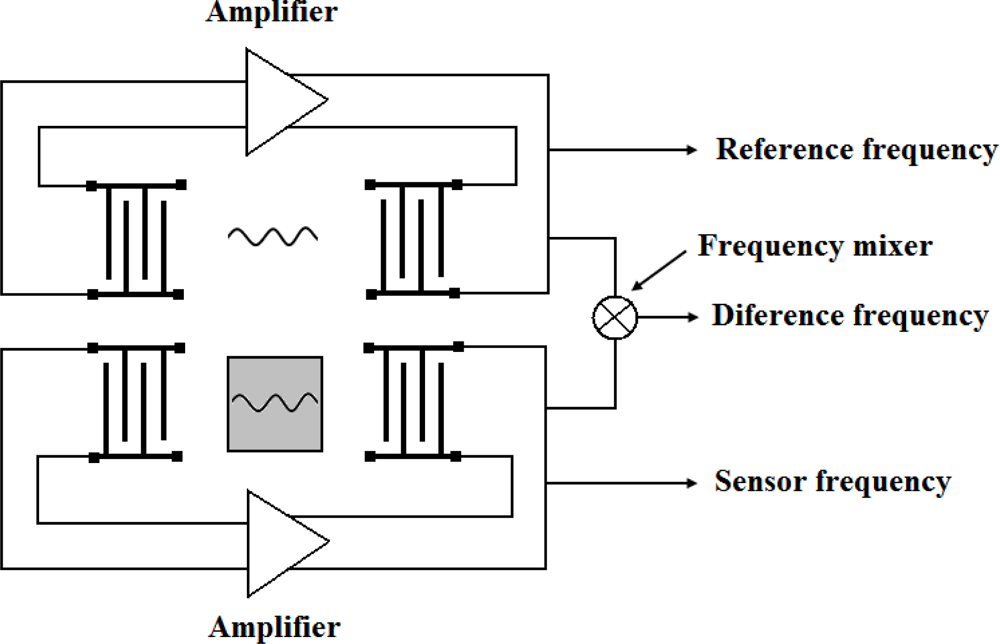
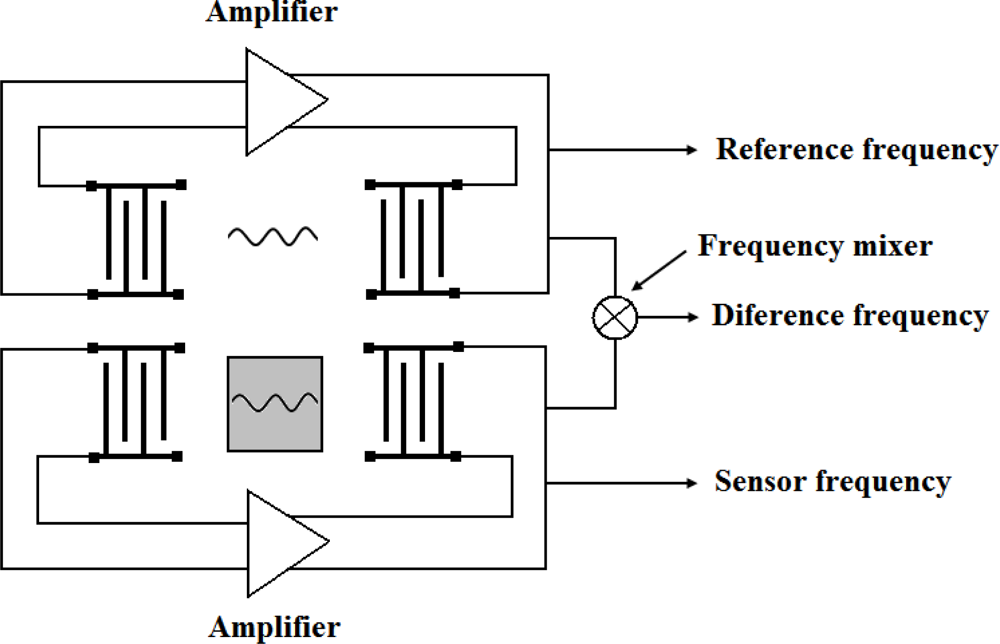
2.2.3. Dual-channel delay line
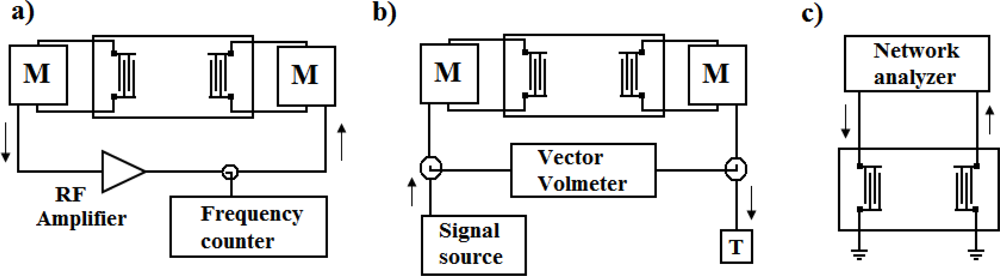
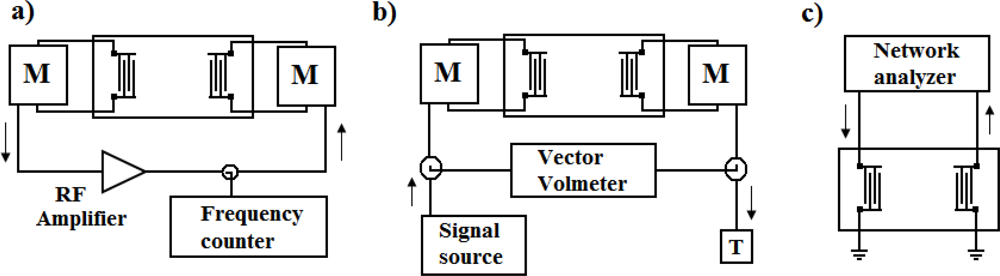
2.3. SGAW Measurement Techniques
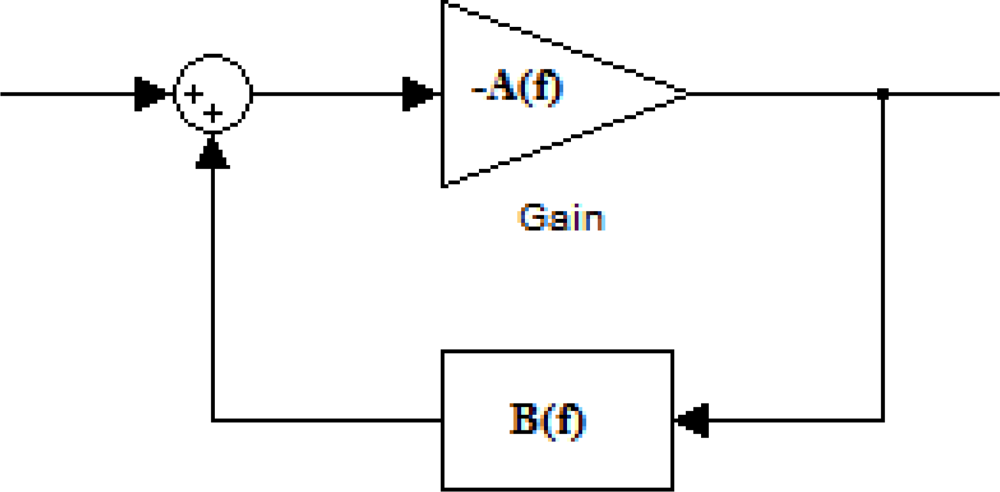
2.3.1. Oscillator
2.3.2. Vector voltmeter
2.3.3. Network analyzer
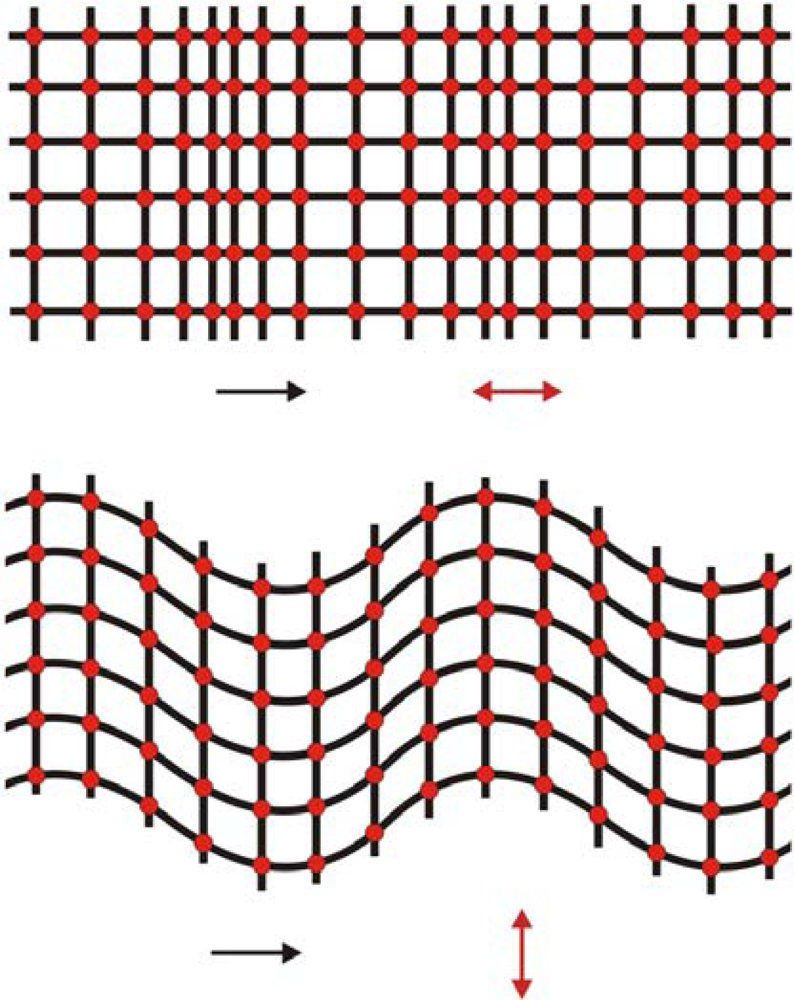
2.4. Acoustic Wave Particle Displacements
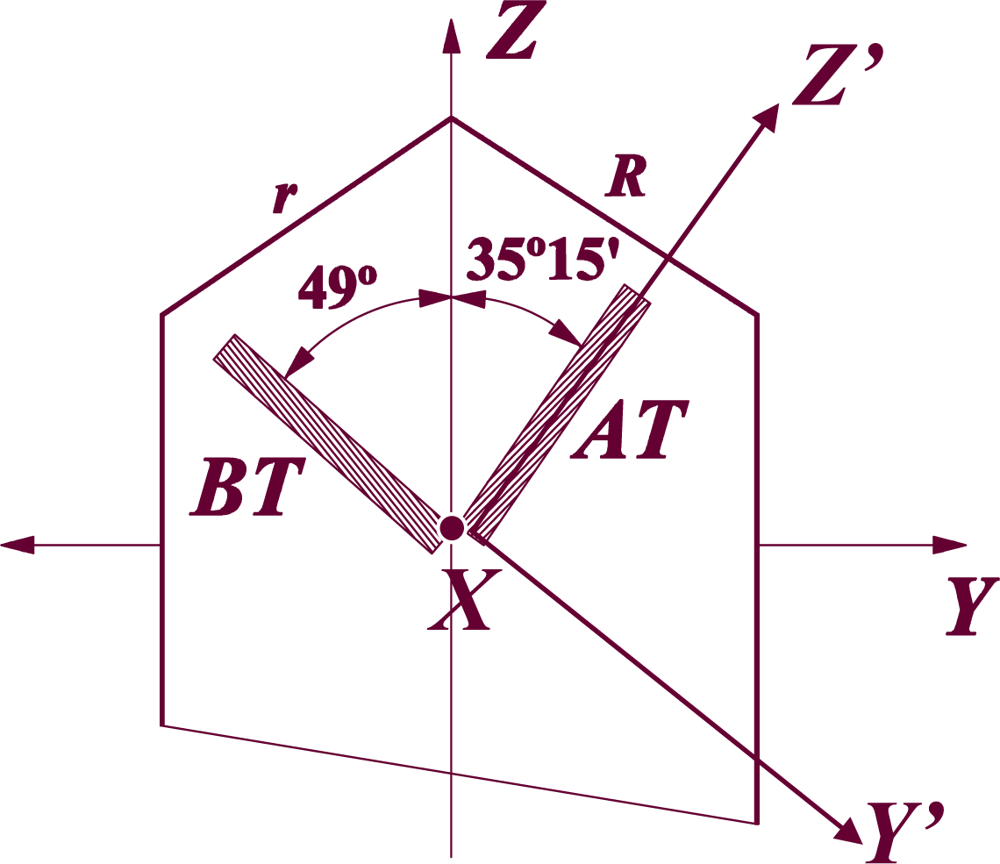
2.5. Crystal’s Cuts and Axis Rotation
3. SGAW Devices for Biosensing
3.1. Shear-Horizontal Surface Acoustic Wave (SH-SAW)
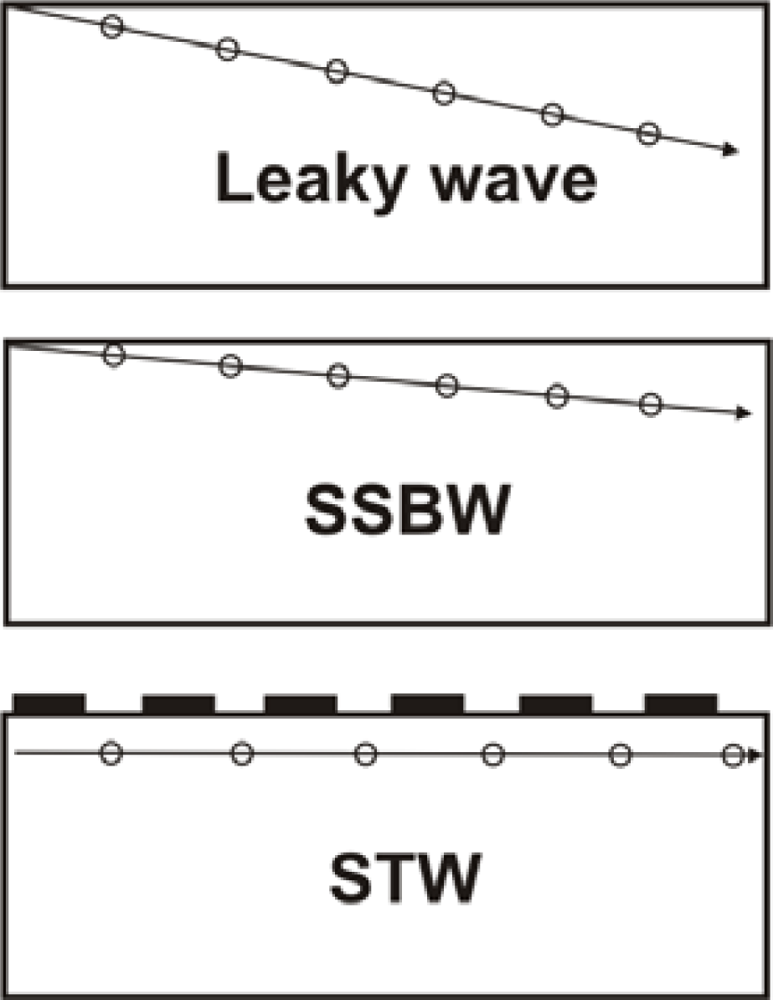
3.2. Surface Transverse Wave (STW)
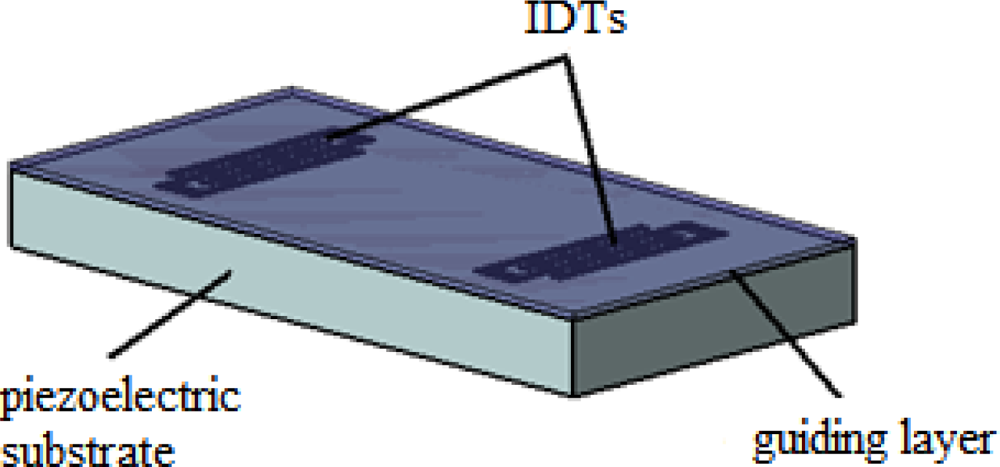
3.3. Love Wave (LW)
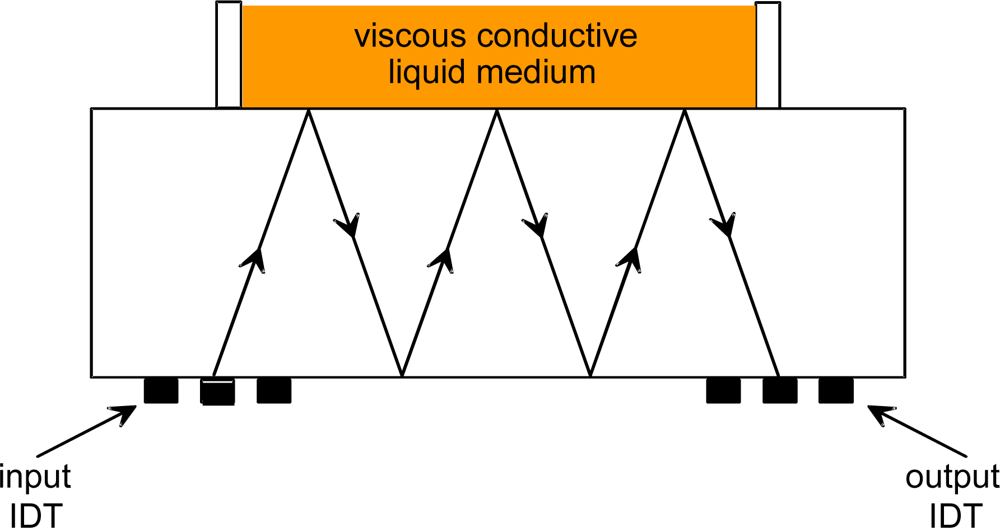
3.4. Shear-Horizontal Acoustic Plate Mode (SH-APM)
3.5. Layer-Guided Acoustic Plate Mode (LG-APM)
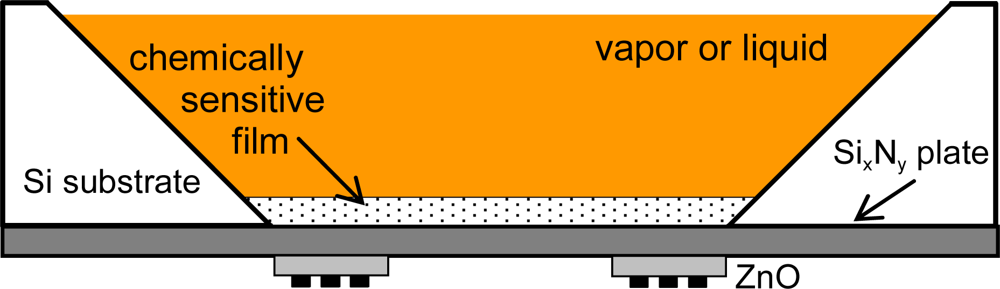
3.6. Flexural Plate Wave (FPW)
4. SGAW Biosensors for Pathogen Detection
4.1. SH-SAW
4.2. LW
4.3. FPW
5. Commercial SGAW-Based Biosensors. Trends and Challenges
6. Concluding Remarks
Acknowledgments
References
- Leonard, P.; Hearty, S.; Brennan, J.; Dunne, L.; Quinn, J.; Chakraborty, T.; O'Kennedy, R. Advances in biosensors for detection of pathogens in food and water. Enzyme Microb. Technol 2003, 32, 3–13. [Google Scholar]
- Ivnitski, D.; Abdel-Hamid, I.; Atanasov, P.; Wilkins, E. Biosensors for the detection of pathogenic bacteria. Biosens. Bioelectron 1999, 14, 599–624. [Google Scholar]
- Anon. Waterborne pathogens kill 10M–20M people/year. World Water Environ. Eng 1996. [Google Scholar]
- Montoya, A.; Ocampo, A.; March, C. Fundamentals of piezoelectric immunosensors. In Piezoelectric Transducers and Applications, 2nd ed; Arnau, A, Ed.; Springer: Berlin Heidelberg, 2008; pp. 289–306. [Google Scholar]
- Rickert, J.; Göpel, W.; Hayward, G.L.; Cavic, B.A.; Thompson, M. Biosensors based on acoustic wave devices. Sens. Update 2001, 5, 105–139. [Google Scholar]
- Kogai, T.; Yatsuda, H. 3F-3 Liquid sensor using SAW and SH-SAW on quartz. IEEE Ultrason. Symp 2006, 552–555. [Google Scholar] [CrossRef]
- Janshoff, A.; Galla, H.J.; Steinem, C. Piezoelectric mass-sensing devices as biosensors–an alternative to optical biosensors? Angew. Chem. Int. Ed 2000, 39, 4005–4032. [Google Scholar]
- Andle, J.C.; Vetelino, J.F. Acoustic wave biosensors. Sens. Actuat. A 1994, 44, 167–176. [Google Scholar]
- Länge, K.; Rapp, B.E.; Rapp, M. Surface acoustic wave biosensors: a review. Anal. Bioanal. Chem 2008, 391, 1509–1519. [Google Scholar]
- Gronewold, T.M. Surface acoustic wave sensors in the bioanalytical field: recent trends and challenges. Anal. Chim. Acta 2007, 603, 119–128. [Google Scholar]
- Smith, J.P.; Hinson-Smith, V. Commercial SAW sensors move beyond military and security applications. Anal. Chem 2006, 78, 3505–3507. [Google Scholar]
- Wohltjen, H.; Dessy, R. Surface acoustic wave probe for chemical analysis. I. Introduction and instrument description. Anal. Chem 1979, 51, 1458–1464. [Google Scholar]
- Wohltjen, H.; Dessy, R. Surface acoustic wave probes for chemical analysis. II. Gas chromatography detector. Anal. Chem 1979, 51, 1465–1470. [Google Scholar]
- Wohltjen, H.; Dessy, R. Surface acoustic wave probes for chemical analysis. III. Thermomechanical polymer analyzer. Anal. Chem 1979, 51, 1470–1475. [Google Scholar]
- Roederer, J.E.; Bastiaans, G.J. Microgravimetric immunoassay with piezoelectric crystals. Anal. Chem 1983, 55, 2333–2336. [Google Scholar]
- Calabrese, G.S.; Wohltjen, H.; Roy, M.K. Surface acoustic wave devices as chemical sensors in liquids. Evidence disputing the importance of Rayleigh wave propagation. Anal. Chem 1987, 59, 833–837. [Google Scholar]
- Flory, C.A.; Baer, R.L. Surface transverse wave mode analysis and coupling to interdigital transducers. IEEE Ultrason. Symp 1987, 313–318. [Google Scholar]
- Moriizumi, T.; Unno, Y.; Shiokawa, S. New sensor in liquid using leaky SAW. IEEE Ultrason. Symp 1987, 579–582. [Google Scholar]
- Grate, J.W.; Frye, G.C. Acoustic wave sensors. In Sensors Update; Göpel, W, Hesse, J, Eds.; Wiley-VCH: Weinheim, 1996. [Google Scholar]
- Andle, J.C.; Weaver, J.T.; Vetelino, J.F.; McAllister, D.J. Selective acoustic plate mode DNA sensor. Sens. Actuator. B 1995, 24, 129–133. [Google Scholar]
- Andle, J.C.; Vetelino, J.F.; Lade, M.W.; McAllister, D.J. An acoustic plate mode device for biosensing applications. In Proc. Transducers 91 Int. Conf. Solid-State Sens. Actuators; San Francisco, USA, 1991; pp. 483–485. [Google Scholar]
- Bender, F.; Meimeth, F.; Dahing, R.; Grunze, M.; Josse, F. Mechanisms of interaction in acostic plate mode immunosensors. Sens. Actuat. B 1997, 40, 105–110. [Google Scholar]
- Dahint, R.; Bender, F.; Morhard, F. Operation of acoustic plate mode immunosensors in complex biological media. Anal. Chem 1999, 71, 3150–3156. [Google Scholar]
- Pyun, J.C.; Beutel, H.; Meyer, J.U.; Ruf, H.H. Development of a biosensor for E. coli based on a flexural plate wave (FPW) transducer. Biosens. Bioelectron 1998, 13, 839–845. [Google Scholar]
- Francis, L.A. PhD Thesis.; Thin film acoustic waveguides and resonators for gravimetric sensing applications in liquid. Université Catholique de Louvain: Belgique, 2006. [Google Scholar]
- Arnau, A. Piezoelectric Transducers and Applications, 2nd ed; Springer: Berlin, Heidelberg, 2008. [Google Scholar]
- Rupp, S.; von Schickfus, M.; Hunklinger, S.; Eipel, H.; Priebe, A.; Enders, D.; Pucci, A. A shear horizontal surface acoustic wave sensor for the detection of antigen-antibody reactions for medical diagnosis. Sens. Actuat. B 2008, 134, 225–229. [Google Scholar]
- Berkenpas, E.; Bitla, S.; Pereira da, C.M. LGS shear horizontal SAW devices for biosensor applications. IEEE Ultrason. Symp 2003, 1404–1407. [Google Scholar]
- Grate, J.W.; Stephen, J.M.; Richard, M.W. Acoustic wave microsensors. Anal. Chem 1993, 65, 940A–848A. [Google Scholar]
- White, R.M.; Voltmer, F.W. Direct piezoelectric coupling to surface elastic waves. Appl. Phys. Lett 1965, 7, 314–316. [Google Scholar]
- Ballantine, D.S.; White, R.M.; Martin, S.J.; Ricco, A.J.; Zellers, E.T.; Frye, G.C.; Wohltjen, H. Acoustic Wave Sensors: Theory, Design and Physico-Chemical Applications; Academic Press: San Diego, CA, USA, 1997. [Google Scholar]
- Nieuwenhuizen, M.S.; Venema, A. Surface acoustic wave chemical sensors. Sens. Mater 1989, 5, 261–300. [Google Scholar]
- Sauerbrey, G. The use of quartz oscillators for weighing thin layers and for microweighing. Z. Physik 1959, 187, 155–206. [Google Scholar]
- Jakoby, B.; Vellekoop, M.J. Properties of Love waves: applications in sensors. Smart Mater. Struct 1997, 6, 668–679. [Google Scholar]
- Morgan, D.P. Surface-Wave Devices; Paperback, Ed.; Elsevier Science Publishers B.V: New York, NY, UK, 1991. [Google Scholar]
- Powell, D.A.; Kalantar-Zadeh, K.; Wlodarski, W. Optimum sensitve area of surface acoustic wave resonator chemical and bio-sensors. IEEE Sens. J 2005, 1229–1232. [Google Scholar]
- Nomura, T.; Saitoh, A.; Horikoshi, Y.; Furukawa, S. Liquid sensing system base on two port SH-SAW resonator. In Proc. IEEE Ultrason. Symp.; Caesars Tahoe, CA, USA, 1999; pp. 477–480. [Google Scholar]
- Schweyer, M.G.; Weaver, J.T.; Andle, J.C.; Douglas, J.M. Comparison of surface transverse wave (STW) and shear horizontal acoustic plate mode (SH-APM) devices for biochemical sensors. In Proc. IEEE Int. Freq. Cont. Symp.; Orlando, FL, USA, 1997; pp. 147–155. [Google Scholar]
- Länge, K.; Bender, F.; Voigt, A.; Gao, H.; Rapp, M. A surface acoustic wave biosensor concept with low flow cell volumes for label-free detection. Anal. Chem 2003, 75, 5561–5566. [Google Scholar]
- Länge, K.; Grimm, S.; Rapp, M. Chemical modification of parylene C coating for SAW biosensors. Sens. Actuat. B 2007, 125, 441–446. [Google Scholar]
- Dickert, F.L.; Tortschanoff, M. Molecularly imprinted sensor layers for the detection of polycyclic aromatic hydrocarbons in water. Anal. Chem 1999, 71, 4559–4563. [Google Scholar]
- Jeutter, D.; Josse, F.; Johnson, M.; Wenzel, M.; Hossenlopp, J.; Cernosek, R. Design of a portable guided SH-SAW chemical sensor system for liquid environments. In Proc. IEEE Int. Freq. Cont. Symp.; Vancouver, BC, August; 2005. [Google Scholar]
- Du, J.; Harding, G.L.; Ogilvy, J.A.; Dencher, P.R.; Lake, M. A study of Love-wave acoustic sensors. Sens. Actuat. A 1996, 56, 211–219. [Google Scholar]
- Shen, Y.-T.; Huang, C.-L.; Chen, R.; Wu, L. A novel SH-SAW sensor system. Sens. Actuat. B 2005, 107, 283–290. [Google Scholar]
- Seo, D.-B.; Chicone, C.; Feng, Z.C. Synchronization problem in delay-line oscillator SAW sensors. Sens. Actuat. A 2005, 121, 44–51. [Google Scholar]
- Vellekoop, M.J.; Nieuwkoop, E.; Haartsen, J.C.; Venema, A. A monolithic SAW physical-electronic system for sensors. IEEE Ultrason. Symp 1987, 641–644. [Google Scholar]
- Auld, B. A. Acoustic Fields and Waves in Solids, 2nd ed.; Krieger: Malabar, Florida, 1990. [Google Scholar]
- Cady, W.G. Piezoelectricity. An Introduction to the Theory and Applications of Elechtromechanical Phenomena in Crystals; Dovers Publications Inc.: New York, NY, USA, 1964. [Google Scholar]
- Tigli, O.; Zagnhloul, M.E. A novel SAW device in CMOS: design, modeling, and fabrication. IEEE Sens. J 2007, 7, 219–227. [Google Scholar]
- Baer, R.L.; Flory, C.A. Some limitations on the use of leaky SAW mode sensors in liquids. In Proc. IEEE Ultrason. Symp.; Orlando, USA, 1991; pp. 279–284. [Google Scholar]
- Deobagkar, D.D.; Limaye, V.; Shinha, S.; Yadava, R.D.S. Acoustic wave immunosensing of Excherichia coli in water. Sens. Actuat. B 2005, 104, 85–89. [Google Scholar]
- Hechner, J.; Soluch, W. Pseudo surface acoustic wave dual delay line on 41° YX LiNbO3 for liquid sensors. Sens. Actuat. B 2005, 111–112, 436–440. [Google Scholar]
- Lu, X.; Luo, Y.; Wang, P.; Deng, M. The small volume liquid density sensor using surface acoustic wave. In Proc. IEEE Int. Conf. Mechantronics and Automation; Luoyang, Henan, China, 2006; pp. 2105–2110. [Google Scholar]
- Chivukula, V.S.; Shur, M.S.; Ciplys, D. Recent advances in application of acoustic, acousto-optic and photoacoustic methods in biology and medicine. Physica status solidi 2007, 204, 3209–3236. [Google Scholar]
- Yamanouchi, K.; Shibayama, K. Propagation and amplification of Rayleigh waves and piezoelectric leaky surface waves in LiNbO. J. Appl. Phys 1972, 43, 856–862. [Google Scholar]
- Nakamura, K. Piezoelectric applications of ferroelectric single crystals. Proc. 13th IEEE Int. Symp. Appl. Ferroelectr., Nara, Japan, 28 May–1 June 2002; 2002; pp. 389–394. [Google Scholar]
- Pollard, T.B.; Kenny, T.D.; Vetelino, J.F.; Pereira da Cunha, M. Pure SH-SAW propagation, transduction measurements on KNbO3. IEEE Trans. Ultrason. Ferroelectr. Freq. Cont 2006, 53, 199–208. [Google Scholar]
- Berkenpas, E.; Millard, P.; Pereira da, C.M. Detection of Escherichia coli O157:H7 with langasite pure shear horizontal surface acoustic wave sensors. Biosens. Bioelectron 2006, 21, 2255–2262. [Google Scholar]
- Shiokawa, S.; Moriizumi, T. Design of SAW sensor in liquid : SAW and communication devices. Jp. J. Appl. Phys 1988, 27, 142–144. [Google Scholar]
- Rapp, M.; Wessa, H.; Ache, H.J. Modification of commercially availabel low-loss SAW devices towards an immunosensor for in-situ measurements in water. In Proc. IEEE Ultrason. Symp.; Seattle, WA, USA, 1995; pp. 433–436. [Google Scholar]
- Wessa, T.; Barié, N.; Rapp, M.; Ache, H.J. Polyimide, a new shielding layer for sensor applications. Sens. Actuat. B 1998, 53, 63–68. [Google Scholar]
- Barié, N.; Rapp, M.; Sigrist, H.; Ache, H.J. Covalent photolinker-mediated immobilization of an intermediate dextran layer to polymer-coated surfaces for biosensing. Biosens. Bioelectron 1998, 13, 855–860. [Google Scholar]
- Ferrari, V.; Lucklum, R. Overview of acoustic-wave microsensors. In Piezoelectric Transducers and Applications, 2nd ed; Arnau, A, Ed.; Springer: Berlin, Heidelberg, Germany, 2008; pp. 39–59. [Google Scholar]
- Milsom, R.E.; Reilly, N.H.C.; Redwood, M. Analysis of generation and detection of surface an bulk acoustic waves by interdigital transducers. IEEE Trans. Sonics Ultrason 1997, SU-24, 147–166. [Google Scholar]
- Lewis, M. Surface skimming bulk waves, SSBW. IEEE Ultrason. Symp 1977, 744–752. [Google Scholar]
- Bagwell, T.L.; Bray, R.C. Novel surface transverse wave resonators with low loss and high Q. IEEE Ultrason. Symp 1987, 319–323. [Google Scholar]
- Tom-Moy, M.; Baer, R.L.; Spira-Solomon, D.; Doherty, T.P. Antrizine measurements using surface transverse wave devices. Anal. Chem 1995, 67, 1510–1516. [Google Scholar]
- Baer, R.L.; Flory, C.A.; Tom-Moy, M.; Solomon, D.S. STW chemical sensors. In Proc. IEEE Ultrason. Symp.; Tucson, USA, 1992; pp. 293–298. [Google Scholar]
- Strashilov, V.L.; Yantchev, V.M. Surface transverse waves: properties, devices, and analysis. IEEE Trans. Ultrason. Ferroelectr. Freq. Cont 2005, 52, 812–821. [Google Scholar]
- Du, J.; Harding, G.L. A multilayer structure for Love-mode acoustic sensors. Sens. Actuat. A 1998, 65, 152–159. [Google Scholar]
- Herrmann, F.; Weihnacht, M.; Buttgenbach, S. Properties of sensors based on shear-horizontal surface acoustic waves in LiTaO3/SiO2 and quartz/SiO2 structures. IEEE Trans. Ultrason. Ferroelectr. Freq. Cont 2001, 48, 268–273. [Google Scholar]
- Kalantar-Zadeh, K.; Powell, D.A.; Sadek, A.Z.; Wlodarski, W.; Yang, Q.B.; Li, Y.X. Comparison of ZnO/64° LiNbO3 and ZnO/36° LiTaO3 surface acoustic wave devices for sensing applications. Sens. Lett 2006, 4, 135–138. [Google Scholar]
- Hickernell, F.S.; Knuth, H.D.; Dablemont, R.C.; Hickernell, T.S. The surface acoustic wave propagation characteristics of 64° YX LiNbO3 and 36° YX LiTaO3 substrates with thin-film SiO2. IEEE Ultrason. Symp 1995, 345–348. [Google Scholar]
- Gizeli, E.; Stevenson, A.C.; Goddard, N.J.; Lowe, C.R. A novel Love-plate acoustic sensor utilizing polymer overlayers. IEEE Trans. Ultrason. Ferroelectr. Freq. Cont 1992, 39, 657–659. [Google Scholar]
- Powell, D.A.; Kalantar-Zadeh, K.; Ippolito, S.; Wlodarski, W. 3E- 2 A layered SAW device based on ZnO/LiTaO3 for liquid media sensing applications. IEEE Ultrason. Symp 2002, 493–496. [Google Scholar]
- Kalantar-Zadeh, K.; Trinchi, A.; Wlodarski, W.; Holland, A. A novel Love-mode device based on a ZnO/ST-cut quartz crystal structure for sensing applications. Sens. Actuat. B 2009, 100, 135–143. [Google Scholar]
- Branch, D.W.; Thayne, L.E. 4D- 4 Love wave acoustic array biosensor platform for autonomous detection. IEEE Ultrason. Symp 2007, 260–263. [Google Scholar]
- Déjous, C.; Savart, M.; Rebière, D.; Pistré, J. A shear-horizontal acoustic plate mode (SH-APM) sensor for biological media. Sens. Actuat. B 1995, 26–27, 452–456. [Google Scholar]
- McHale, G.; Newton, M.I.; Martin, F. Theoretical mass sensitivity of Love wave and layer guided acoustic plate mode sensors. Appl. Phys. Lett 2002, 91, 9701–9710. [Google Scholar]
- McHale, G.; Newton, M.I.; Matin, F. Layer guided shear horizontally polarized acoustic plate modes. Appl. Phys. Lett 2002, 91, 5735–5744. [Google Scholar]
- Evans, C.R.; Stanley, S.M.; Percival, C.J.; McHale, G.; Newton, M.I. Lithium tantalate layer guided plate mode sensors. Sens. Actuat. A 2006, 132, 241–244. [Google Scholar]
- White, R.M.; Wicher, P.J.; Wenzel, S.W.; Zellers, E.T. Plate-mode ultrasonic oscillator sensors. IEEE Trans. Ultrason. Ferroelectr. Freq. Cont 1987, 34, 162–171. [Google Scholar]
- Wenzel, S.W.; White, R.M. A multisensor employing an ultrasonic lamb-wave oscillator. IEEE Trans. Electron. Devices 1988, 35, 735–743. [Google Scholar]
- Venema, A.A. Transduction and propagation of surface acoustic waves in three-layered media with an electrically conductive substrate. Ph.D. Thesis; Delft University of Technology: Delft, the Netherlands, 1980. [Google Scholar]
- Vellekoop, M.J.; Lubking, G.W.; Sarro, P.M.; Venema, A. Integrate-circuit-compatible design and technology of acoustic-wave-based microsensors. Sens. Actuat. A 1994, 44, 249–263. [Google Scholar]
- Hall, R.H. Biosensor technologies for detecting microbiological foodborne hazards. Microbes. Infect 2002, 4, 425–432. [Google Scholar]
- Cowan, S.E.; Black, J.; Keasling, J.D.; White, R.M. Ultrasonic flexural-plate-wave sensor for detecting the concentration of settling E. coli W3110 cells. Anal. Chem 1999, 71, 3622–3625. [Google Scholar]
- Deisingh, A.K.; Thompson, M. Biosensors for the detection of bacteria. Can. J. Microbiol 2004, 50, 69–77. [Google Scholar]
- March, C.; Manclús, J.J.; Abad, A.; Navarro, A.; Montoya, A. Rapid detection and counting of viable beer-spoilage lactic acid bacteria using monoclonal chemiluminiscente enzyme immunoassay and CCD camera. J. Immunol. Methods 2005, 303, 92–104. [Google Scholar]
- Iqbal, S.S.; Mayo, M.W.; Bruno, J.G.; Bronk, B.V.; Batt, C.A.; Chambers, J.P. A review of molecular recognition technologies for detection of biological threat agents. Biosens. Bioelectron 2000, 15, 549–578. [Google Scholar]
- March, C.; Manclús, J.J.; Jiménez, Y.; Arnau, A.; Montoya, A. A piezoelectric immunosensor for the determination of pesticide residues and metabolites in fruit juices. Talanta 2009, 78, 827–833. [Google Scholar]
- Leidl, A.; Oberlack, I.; Schaber, U.; Mader, B.; Drost, S. Surface acoustic wave devices and applications in liquid sensing. Smart Mater. Struct 1997, 6, 680–688. [Google Scholar]
- Martin, S.J.; Ricco, A.J.; Frye, G.C. Sensing in liquid with SH plate mode device. In Proc. IEEE Ultrason. Symp.; Chicago, USA, 1988; pp. 607–611. [Google Scholar]
- Hughes, R.C.; Martin, S.J.; Ricco, A.J. Liquid-solid phase transition detection with acoustic plate mode sensor: Application to icing of surfaces. Sens. Actuat. A 1990, A21–A23, 693–699. [Google Scholar]
- Stanley, S.M.; Dodi, I.A.; Evans, C.R.; Paston, S.J.; Rees, R.C.; Percival, C.J.; McHale, G.; Newton, M.I. Layer guided-acoustic plate mode biosensors for monitoring MHC-peptide interactions. Analyst 2006, 131, 892–894. [Google Scholar]
- Rapp, M.; Moss, D.A.; Reichert, J.; Ache, H.J. Mass-sensitive immunosensor based on surface acoustic wave devices for in-situ measurements in water. Proc. 7th Int. Conf. Solid-State Sens. Actuators, Yokohama, Japan, 1993; pp. 538–540.
- Länge, K.; Blaess, G.; Voigt, A.; Gotzen, R.; Rapp, M. Integration of a surface acoustic wave biosensor in a microfluidic polymer chip. Biosens. Bioelectron 2006, 22, 227–232. [Google Scholar]
- Kovacs, G.; Lubking, G.W.; Vellekoop, M.J.; Venema, A. Love waves for (bio)chemical sensing in liquids. In Proc. IEEE Ultrason. Symp.; Tucson, AZ, USA, 1992; pp. 281–285. [Google Scholar]
- Gizeli, E.; Goddard, N.J.; Lowe, C.R.; Stevenson, A.C. A Love plate biosensor utilising a polymer layer. Sens. Actuat. B 1992, 6, 131–137. [Google Scholar]
- Harding, G.L.; Du, J.; Dencher, P.R.; Barnett, D.; Howe, E. Love wave acoustic immunosensor operation in liquid. Sens. Actuat. A 1997, 61, 279–286. [Google Scholar]
- Freudenberg, J.; Schelle, S.; Beck, K.; von Schickfus, M.; Hunklinger, S. A contactless surface acoustic wave biosensor. Biosens. Bioelectron 1999, 14, 423–425. [Google Scholar]
- Howe, E.; Harding, G. A comparison of protocols for the optimisation of detection of bacteria using a surface acoustic wave (SAW) biosensor. Biosens. Bioelectron 2000, 15, 641–649. [Google Scholar]
- Tamarin, O.; Comeau, S.; Déjous, C.; Moynet, D.; Rebière, D.; Bezian, J.; Pistré, J. Real time device for biosensing: design of a bacteriophage model using love acoustic wave. Biosens. Bioelectron 2003, 18, 755–763. [Google Scholar]
- Kalantar-Zadeh, K.; Wlodarski, W.; Chen, Y.Y.; Fry, B.N.; Galatsis, K. Novel Love mode surface acoustic wave based immunosensors. Sens. Actuat. B 2003, 91, 143–147. [Google Scholar]
- Branch, D.W.; Brozik, S.M. Low-level detection of a Bacillus anthracis simulant using Love-wave biosensors on 36° YX LiTaO3. Biosens. Bioelectron 2004, 19, 849–859. [Google Scholar]
- Moll, N.; Pascal, E.; Dinh, D.H.; Pillot, J.P.; Bennetau, B.; Rebiere, D.; Moynet, D.; Mas, Y.; Mossalayi, D.; Pistre, J.; Dejous, C. A Love wave immunosensor for whole E. coli bacteria detection using an innovative two-step immobilisation approach. Biosens. Bioelectron 2007, 22, 2145–2150. [Google Scholar]
- Moll, N.; Pascal, E.; Dinh, D.H.; Lachaud, J.-L.; Vellutini, L.; Pillot, J.-P.; Rebière, D.; Moynet, D.; Pistré, J.; Mossalayi, D.; Mas, Y.; Bennetau, B.; Déjous, C. Multipurpose Love acoustic wave immunosensor for bacteria, virus or proteins detection. ITBM-RBM 2008, 29, 155–161. [Google Scholar]
- Andrä, J.; Böhling, A.; Gronewold, T.M.A.; Schlecht, U.; Perpeet, M.; Gutsmann, T. Surface acoustic wave biosensor as a tool to study the interactions of antimicrobial peptides with phospholipid and lipopolysaccharide model membranes. Langmuir 2008, 24, 9148–9153. [Google Scholar]
- Bisoffi, M.; Hjelle, B.; Brown, D.C.; Branch, D.W.; Edwards, T.L.; Brozik, S.M.; Bondu-Hawkins, V.S.; Larson, R.S. Detection of viral bioagents using a shear horizontal surface acoustic wave biosensor. Biosens. Bioelectron 2008, 23, 1397–1403. [Google Scholar]
- White, R.M.; Wenzel, S.W. Fluid loading of a Lamb-wave sensor. Appl. Phys. Lett 1988, 52, 1653–1655. [Google Scholar]
- Wenzel, S.W.; White, R.M. Analytic comparison of the sensitivities of bulk-wave, surface-wave, and flexural plate-wave ultrasonic gravimetric sensors. Appl. Phys. Lett 1989, 54, 1976–1978. [Google Scholar]
- Costello, B.J.; Martin, B.A.; White, R.M. Ultrasonic plate waves for biochemical measurements. In Proc. IEEE Ultrason. Symp.; Montreal, PQ, Canada, 1989; pp. 977–981. [Google Scholar]
- Kuznetsova, L.A.; Coakley, W.T. Applications of ultrasound streaming and radiation force in biosensors. Biosens. Bioelectron 2007, 22, 1567–1577. [Google Scholar]
- Joseph, S.; Gronewold, T.M.; Schlensog, M.D.; Olbrich, C.; Quandt, E.; Famulok, M.; Schirner, M. Specific targeting of ultrasound contrast agent (USCA) for diagnostic application: an in vitro feasibility study based on SAW biosensor. Biosens. Bioelectron 2005, 20, 1829–1835. [Google Scholar]
- Gronewold, T.M.; Glass, S.; Quandt, E.; Famulok, M. Monitoring complex formation in the blood-coagulation cascade using aptamer-coated SAW sensors. Biosens. Bioelectron 2005, 20, 2044–2052. [Google Scholar]
- Jung, A.; Gronewold, T.M.; Tewes, M.; Quandt, E.; Berlin, P. Biofunctional structural design of SAW sensor chip surfaces in a microfluidic sensor system. Sens. Actuat. B 2007, 124, 46–52. [Google Scholar]
- Gronewold, T.M.; Schlecht, U.; Quandt, E. Analysis of proteolytic degradation of a crude protein mixture using a surface acoustic wave sensor. Biosens. Bioelectron 2007, 22, 2360–2365. [Google Scholar]
- Perpeet, M.; Glass, S.; Gronewold, T.M.A.; Kiwitz, A.; Malavé, I.; Stoyanov, M.; Tewes, M.; Quandt, E. SAW sensor system for market-free molecular interaction analysis. Anal. Lett 2006, 39, 1747–1757. [Google Scholar]
- Weinberg, M.S.; Cunningham, B.; Hildebrant, E. Flexural plate wave sensor. USA Patent 5688699 2006. [Google Scholar]
- Martin, S.J.; Butler, M.A.; Frye, G.C.; Smith, J.H. Magnetically excited flexural plate wave apparatus. USA Patent 5836203 1998. [Google Scholar]
- Miller, M.F.; Masters, B.P.; Lundstrom, M.E. Method and apparatus for detection of analyte using a flexural plate wave device and magnetic particles. USA Patent 7300631, 2007. [Google Scholar]
- Marth, M.; Maier, D.; Stahl, U.; Rapp, M.; Wessa, T.; Honerkamp, J. Optimization of surface acoustic wave sensor arrays and application to high performance liquid chromatography. Sens. Actuat. B 1999, 61, 191–198. [Google Scholar]
- Hofer, M.; Finger, N.; Kovacs, G.; Schöberl, J.; Zaglmayr, S.; Langer, R.; Lerch, R. Finite-element simulation of wave propagation in periodic piezoelectric SAW structures. IEEE Trans. Ultrason. Ferroelectr. Freq. Cont 2006, 53, 1192–1201. [Google Scholar]
- Ippolito, S.J.; Kalantar-Zadeh, K.; Wlodarski, W.; Matthews, G.I. The study of ZnO/XY LiNbO3 layered SAW devices for sensing applications. IEEE Sens. J 2003, 539–542. [Google Scholar]
- Ippolito, S.J.; Kalantar-Zadeh, K.; Powell, D.A.; Wlodarski, W. A 3-dimensional finite element approach for simulating acoustic wave propagation in layered SAW devices. IEEE Ultrason. Symp 2003, 303–306. [Google Scholar]
- Powell, D.A.; Kalantar-Zadeh, K.; Wlodarski, W. Numerical calculation of SAW sensitivity: application to ZnO/LiTaO3 transducers. Sens. Actuat. A 2004, 115, 456–461. [Google Scholar]
- Abdollahi, A.; Jiang, A.; Arabshahi, S.A. Evaluation on mass sensitivity of SAW sensors for different piezoelectric materials using finite-element analyisis. IEEE Trans. Ultrason. Ferroelectr. Freq. Cont 2007, 54, 2446–2455. [Google Scholar]



© 2009 by the authors; licensee MDPI, Basel, Switzerland This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Rocha-Gaso, M.-I.; March-Iborra, C.; Montoya-Baides, Á.; Arnau-Vives, A. Surface Generated Acoustic Wave Biosensors for the Detection of Pathogens: A Review. Sensors 2009, 9, 5740-5769. https://doi.org/10.3390/s90705740
Rocha-Gaso M-I, March-Iborra C, Montoya-Baides Á, Arnau-Vives A. Surface Generated Acoustic Wave Biosensors for the Detection of Pathogens: A Review. Sensors. 2009; 9(7):5740-5769. https://doi.org/10.3390/s90705740
Chicago/Turabian StyleRocha-Gaso, María-Isabel, Carmen March-Iborra, Ángel Montoya-Baides, and Antonio Arnau-Vives. 2009. "Surface Generated Acoustic Wave Biosensors for the Detection of Pathogens: A Review" Sensors 9, no. 7: 5740-5769. https://doi.org/10.3390/s90705740