Survey of Visual and Force/Tactile Control of Robots for Physical Interaction in Spain




Abstract
:1. Introduction
2. Visual Servoing Control
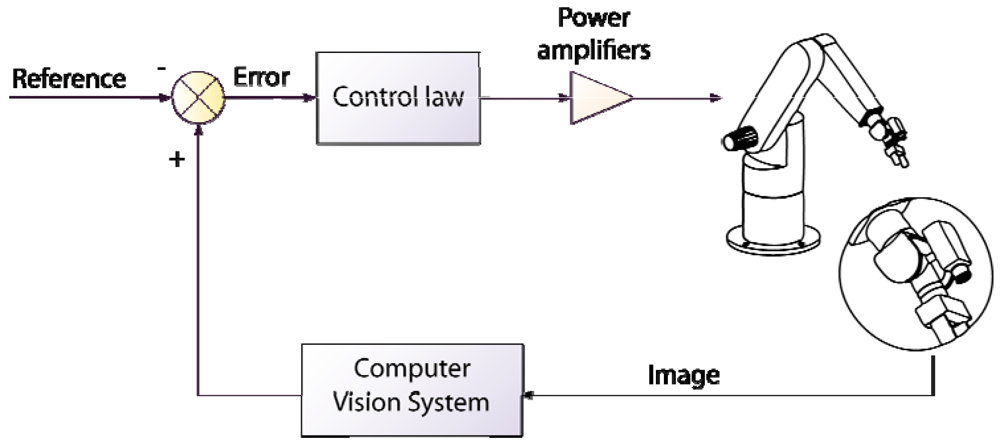
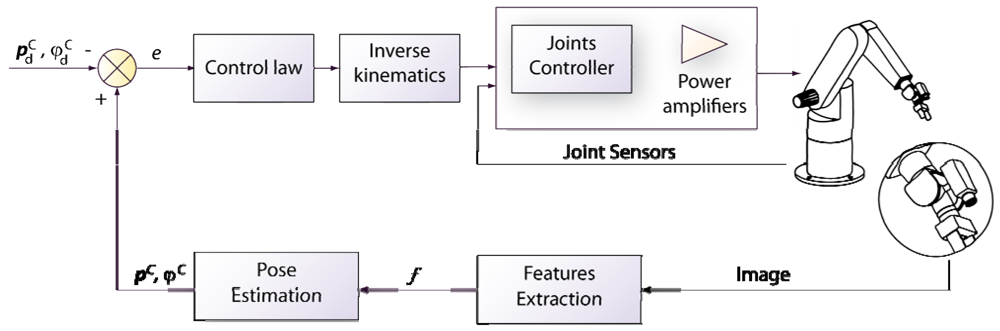
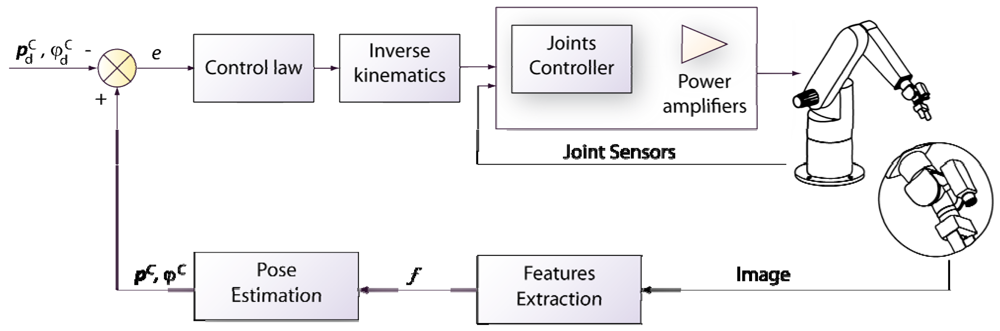
2.1. Position-Based Visual Servoing
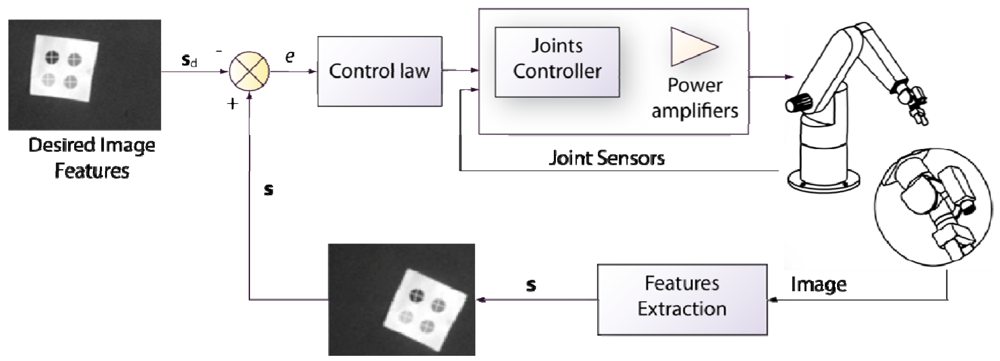
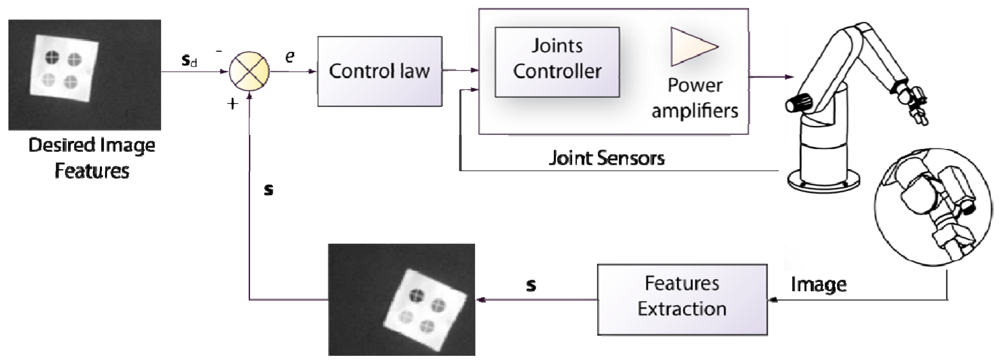
2.2. Image-Based Visual Servoing
- Intrinsic camera parameters.
- The current value of the visual features in pixels.
- 3D information relating to the 3D points corresponding to the visual features (e.g., the distance from the camera to the corresponding object feature).
2.2.1. The visibility problem
2.2.2. The problem of finding adequate visual features
2.2.3. Image path trackers
2.3. Stereo Visual Servoing
2.4. Tracking of Objects: Movement Estimators
3. Force Control
3.1. Indirect Force Control
3.2. Direct Force Control
3.3. Other Control Schemes Using Force/Torque Sensors in Robot Manipulation
4. Tactile Control
4.1. Tactile Sensing for Object Identification
4.2. Tactile Sensing for Manipulation Control
5. Multi-Sensor Control
5.1. Visual-Force Control
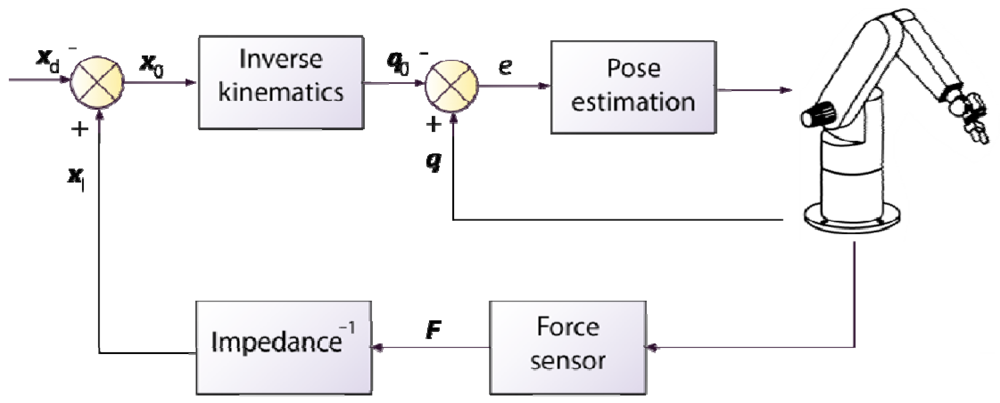
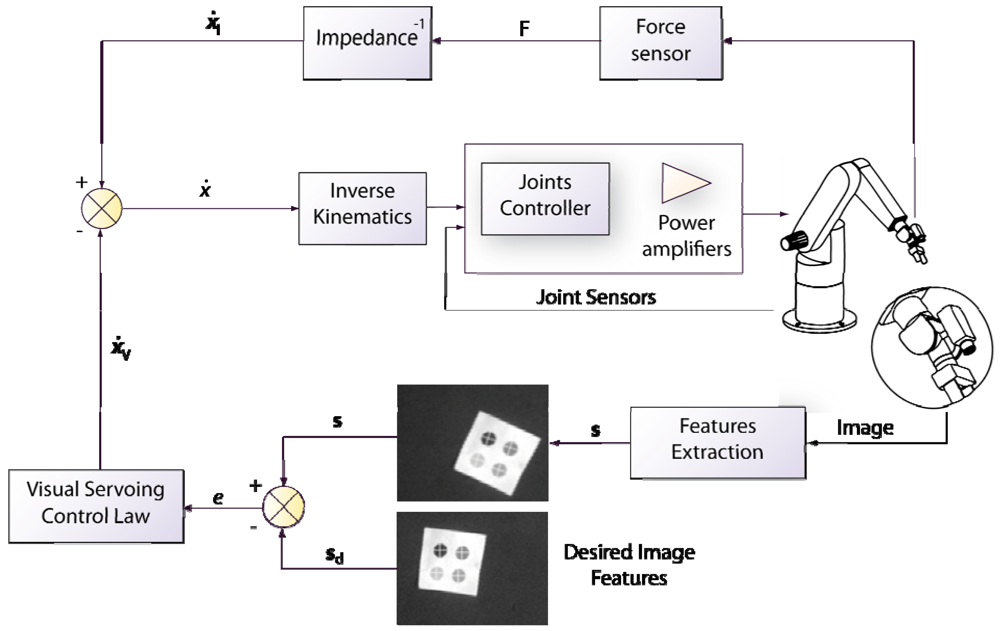
5.1.1. Visual/force impedance control
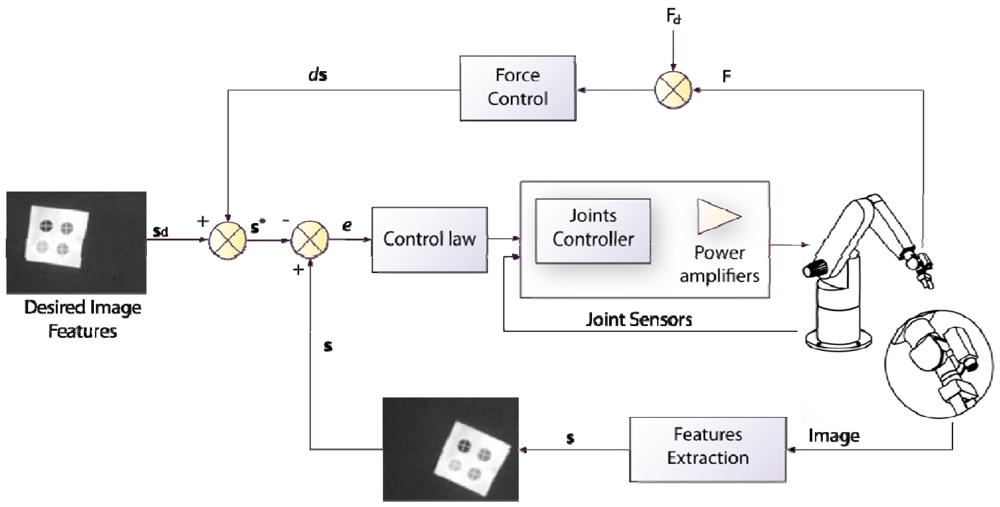
5.1.3. Visual/force hybrid control
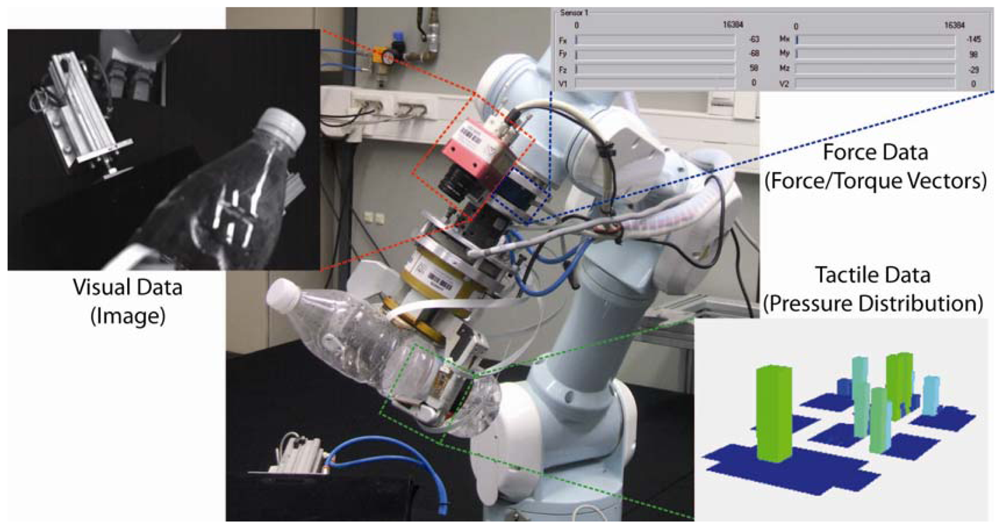
5.2. Visual-Force-Tactile Control
6. Conclusions
Acknowledgments
References and Notes
- Christensen, H.I.; Hager, G.D. Sensing and Estimation. In Handbook of Robotics; Siciliano, B., Oussama, K., Eds.; Springer-Verlag: Berlin Heidelberg, Germany, 2008; pp. 87–107. [Google Scholar]
- Xie, M. Fundamentals of Robotics: Linking Perception to Action; World Scientific Publishing: River Edge, NJ, USA, 2003. [Google Scholar]
- Hill, J.; Park, W.T. Real time control of a robot with a mobile camera. Proceedings of the 9th. International Symposium on Industrial Robots, Washington, DC, USA; 1979; pp. 233–246. [Google Scholar]
- Kopacek, P.; Kopacek, B. Intelligent, flexible disassembly. Int. J. Adv. Manuf. Technol. 2006, 30, 554–560. [Google Scholar]
- Shirai, Y.; Inoue, H. Guiding a robot by visual feedback in assembling tasks. Pattern Recogn. 1973, 5, 99–106. [Google Scholar]
- Hutchinson, S.; Hager, G.D.; Corke, P.I. A tutorial on visual servo control. IEEE Trans. Robot. Autom. 1996, 12, 651–670. [Google Scholar]
- Chaumette, F.; Hutchinson, S. Visual Servoing and Visual Tracking. In Handbook of Robotics; Siciliano, B., Oussama, K., Eds.; Springer-Verlag: Berlin Heidelberg, Germany, 2008; pp. 563–583. [Google Scholar]
- Arbib, M.A. The Handbook of Brain Theory and Neural Networks; MIT Press: Cambridge, MA, USA, 1995. [Google Scholar]
- Wells, G.; Venaille, C.; Torras, C. Promising research—vision-based robot positioning using neural networks. Image Vis. Comput. 1996, 14, 715–732. [Google Scholar]
- Martinez-Marin, T.; Duckett, T. Robot docking by reinforcement learning in a visual servoing framework. Proceedings of the IEEE Conference on Robotics, Automation and Mechatronics, Singapore, Singapore, December, 2004; pp. 159–164.
- El-Fakdi, A.; Carreras, M. Policy gradient based Reinforcement Learning for real autonomous underwater cable tracking. Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, Fance, September, 2008; pp. 3635–3640.
- Lopez-Garcia, J.C.; Moreno-Armendariz, M.A.; Riera-Babures, J.; Balsi, M.; Vilasis-Cardona, X. Real time computer vision by means of CNNs on FPGAs. Proceedings of the 2nd International Conference on Cybernetics and Information Technologies, Systems and Applications, Orlando, FL, USA, July, 2005; pp. 98–102.
- Sanderson, A.C.; Weiss, L.E. Image-based visual servo control using relational graph error signals. Proceedings of the IEEE International Conference on Cybernetics and Society, Washington, DC, USA; 1980; pp. 1074–1077. [Google Scholar]
- Cervera, E. Distributed visual servoing: A cross-platform agent-based implementation. Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Edmonton, AB, Canada, August, 2005; pp. 3676–3681.
- Cervera, E. A cross-platform network-ready visual servo simulator. Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China, October, 2006; pp. 2314–2319.
- Cervera, E. Visual servoing toolbox for MATLAB/Simulink. Available online: http://vstoolbox.sourceforge.net (accessed January 2003).
- Cervera, E.; Martinet, P. Visual servoing with indirect image control and a predictable camera trajectory. Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Kyongju, Korea; 1999; pp. 381–386. [Google Scholar]
- Cervera, E.; del Pobil, A.P.; Berry, F.; Martinet, P. Improving image-based visual servoing with three-dimensional features. Int. J. Rob. Res. 2003, 22, 821–839. [Google Scholar]
- Cervera, E.; Berry, F.; Martinet, P. Stereo visual servoing with oriented blobs. Proceedings of the 11th International Conference on Advanced Robotics, Coimbra, Portugal, June, 2003; pp. 977–982.
- Vargas, M.; Malpesa, A.R.; Rubio, F.R. Modelling and control of a visual servoing system. Syst. Anal. Model. Simul. 2000, 38, 401–417. [Google Scholar]
- Bachiller, M.; Cerrada, J.A.; Cerrada, C. A modular scheme for controller design and performance evaluation in 3D visual servoing. J. Intell. Robot. Syst. 2003, 36, 235–264. [Google Scholar]
- Wirz, R.; Marin, R. Remote programming of an Internet Tele-Lab for learning visual servoing techniques: a case study. Proceedings of the IEEE International Conference on Systems, Man and Cybernetics, The Hague, The Netherlands, October, 2004; pp. 4414–4419.
- Abderrahim, M.; Diaz, J.C.; Rossi, C.; Salichs, M.A. Experimental simulation of satellite relative navigation using computer vision. Proceedings of the 2nd International Conference on Recent Advances in Space Technologies, Istanbul, Turkey, June, 2005; pp. 379–384.
- Vargas, M.; Rubio, F.R. Computed-torque scheme for 6 DOF hybrid feature/position-based visual servoing. Proceedings of the 5th IFAC International Symposium on Intelligent Components and Instruments for Control Applications, Aveiro, Portugal, July, 2003; pp. 157–164.
- Ángel, L.; Sebastian, J.M.; Saltaren, R.; Aracil, R.; Sanpedro, J. RoboTenis: optimal design of a parallel robot with high performance. Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Edmonton, AB, Canada, August, 2005; pp. 2134–2139.
- Sebastian, J.M.; Traslosheros, A.; Angel, L.; Roberti, F.; Carelli, R. Parallel robot high speed object tracking. Proceedings of the 4th International Conference on Image Analysis and Recognition, Montreal, PQ, Canada, August, 2007; pp. 295–306.
- Ángel, L.; Sebastian, J.M.; Traslosheros, A.; Roberti, F.; Carelli, R. Visual servoing of a parallel robot system. European Control Conference, Kos, Greece, July 2007; pp. 1463–1470.
- Montijano, E.; Sagues, C. Position-Based Navigation Using Multiple Homographies. Proceedings of the 13th IEEE International Conference on Emerging Technologies and Factory Automation, Hamburg, Germany, September, 2008; pp. 994–1001.
- Chaumette, F.; Hutchinson, S. Visual servo control. I. Basic approaches. IEEE Robot. Autom. Mag. 2006, 13, 82–90. [Google Scholar]
- Marchand, E.; Rizzo, A.; Chaumette, F. Avoiding robot joint limits and kinematic singularities in visual servoing. Proceedings of the 13th International Conference on Pattern Recognition, Vienna, Austria, August, 1996; pp. 297–301.
- Chaumette, F. Potential problems of stability and convergence in image-based and position-based visual servoing. In The confluence of vision and control; Kriegman, D.J., Ed.; Springer-Verlag, Inc.: New York, NY, USA, 1998; pp. 66–78. [Google Scholar]
- Pari, L.; Sebastian, J.M.; Gonzalez, C.; Angel, L. Image based visual servoing: A new method for the estimation of the image jacobian in dynamic environments. Proceedings of the 3rd International Conference on Image Analysis and Recognition, Povoa de Varzim, Portugal, September, 2006; pp. 850–861.
- Sebastian, J.M.; Pari, L.; Angel, L.; Traslosheros, A. Uncalibrated visual servoing using the fundamental matrix. Robot. Auton. Syst. 2009, 57, 1–10. [Google Scholar]
- Pari, L.; Sebastian, J.M.; Traslosheros, A.; Angel, L. Image based visual servoing: Estimated image Jacobian by using fundamental matrix VS analytic Jacobian. Proceedings of the 5th International Conference on Image Analysis and Recognition, Povoa de Varzim, Portugal, June, 2008; pp. 706–717.
- Echegoyen, Z.; d'Anjou, A.; Grana, M. Modeling a legged robot for visual servoing. Proceedings of the International Conference on Computational Science and Its Applications, Kuala Lumpur, Malaysia, August, 2007; Gervasi, O., Gavrilova, M. L., Eds.; Springer-Verlag: Berlin: Germany, 2007; pp. 798–810. [Google Scholar]
- Pomares, J.; Chaurnette, F.; Torres, F. Adaptive visual servoing by simultaneous camera calibration. Proceedings of the IEEE International Conference on Robotics and Automation, Rome, Italy, April, 2007; pp. 2811–2816.
- Mezouar, Y.; Chaumette, F. Path planning for robust image-based control. IEEE Trans. Robot. Autom. 2002, 18, 534–549. [Google Scholar]
- Malis, E. Visual servoing invariant to changes in camera-intrinsic parameters. IEEE Trans. Robot. Autom. 2004, 20, 72–81. [Google Scholar]
- Garcia-Aracil, N.; Malis, E.; Aracil-Santonja, R.; Perez-Vidal, C. Continuous visual servoing despite the changes of visibility in image features. Proceedings of the IEEE International Conference on Robotics and Automation, Barcelona, Spain, April, 2005; pp. 1214–1220.
- Perez, C.; Morales, R.; Garcia-Aracil, N.; Azorin, J.M.; Sabater, J.M. The visibility problem in visual servoing. Proceedings of the 3rd International Conference on Informatics in Control, Automation and Robotics, Setubal, Portugal, August, 2006; pp. 482–485.
- Garcia-Aracil, N.; Reinoso, O.; Malis, E.; Aracil, R. Parameters selection and stability analysis of invariant visual servoing with weighted features. Proceedings of the IEEE International Conference on Robotics and Automation, Barcelona, Spain, April, 2005; pp. 3492–3497.
- Cervera, E.; Garcia-Aracil, N.; Martinez, E.; Nomdedeu, L.; del Pobil, A.P. Safety for a robot arm moving amidst humans by using panoramic vision. Proceedings of the IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, May, 2008; pp. 2183–2188.
- Cervera, E.; Martinet, P. Combining pixel and depth information in image-based visual servoing. Proceedings of the IEEE International Conference on Advanced Robotics, Tokyo, Japan; 1999; pp. 445–450. [Google Scholar]
- Pages, J.; Collewet, C.; Chaumette, F.; Salvi, J. Plane-to-plane positioning from image-based visual servoing and structured light. Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Sendai, Japan, September, 2004; pp. 1004–1009.
- Pages, J.; Collewet, C.; Chaumette, F.; Salvi, J. Optimizing plane-to-plane positioning tasks by image-based visual servoing and structured light. Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Edmonton, AB, Canada, August, 2005; pp. 1000–1010.
- Pages, J.; Collewet, C.; Chaumette, F.; Salvi, J. Robust decoupled visual servoing based on structured light. Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Edmonton, AB, Canada, August, 2005; pp. 2676–2681.
- Pages, J.; Collewet, C.; Chaumette, F.; Salvi, J. An approach to visual servoing based on coded light. Proceedings of the IEEE International Conference on Robotics and Automation, Orlando, FL, USA, May, 2006; pp. 4118–4123.
- Vargas, M.; Malis, E. Visual servoing based on an analytical homography decomposition. Proceedings of the 44th IEEE Conference on Decision Control/European Control Conference, Seville, Spain, December, 2005; pp. 5379–5384.
- Lopez-Nicolas, G.; Bhattacharya, S.; Guerrero, J.J.; Sagues, C.; Hutchinson, S. Switched homography-based visual control of differential drive vehicles with field-of-view constraints. Proceedings of the IEEE International Conference on Robotics and Automation, Rome, Italy, April, 2007; pp. 4238–4244.
- López-Nicolás, G.; Sagüés, C.; Guerrero, J.J.; Kragic, D.; Jensfelt, P. Switching visual control based on epipoles for mobile robots. Robot. Auton. Syst. 2008, 56, 592–603. [Google Scholar]
- Lopez-Nicolas, G.; Sagues, C.; Guerrero, J.J.; Kragic, D.; Jensfelt, P. Nonholonomic epipolar visual servoing. Proceedings of the IEEE International Conference on Robotics and Automation, Orlando, FL, USA, May, 2006; pp. 2378–2384.
- Merino, L.; Wiklund, J.; Caballero, F.; Moe, A.; De Dios, J.R.M.; Forssen, P.E.; Nordberg, K.; Ollero, A. Vision-based multi-UAV position estimation. IEEE Robot. Autom. Mag. 2006, 13, 53–62. [Google Scholar]
- Becerra, H.M.; Sagues, C. A Sliding Mode Control Law for Epipolar Visual Servoing of Differential-Drive Robots. Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, France, September, 2008; pp. 3058–3063.
- Ortiz, A.; Simo, M.; Oliver, G. A vision system for an underwater cable tracker. Mach. Vis. Appl. 2002, 13, 129–140. [Google Scholar]
- Pomares, J.; Torres, F. Movement flow-based visual servoing to track moving objects. Proceedings of the 10th International Symposium on Robotics and Applications held at the 6th Biannual World Automation Congress, Seville, Spain, June, 2004; pp. 241–246.
- Pomares, J.; Torres, F. Time independent tracking using 2-D movement flow-based visual servoing. Proceedings of the IEEE International Conference on Robotics and Automation, Barcelona, Spain, April, 2005; pp. 2541–2546.
- Garcia, G.J.; Pomares, J.; Torres, F. A new time-independent image path tracker to guide robots using visual servoing. Proceedings of the 12th IEEE International Conference on Emerging Technologies and Factory Automation, Patras, Greece, September, 2007; pp. 957–964.
- Garcia, G.J.; Pomares, J.; Torres, F. Automatic robotic tasks in unstructured environments using an image path tracker. Control Eng. Pract. 2009, 17, 597–608. [Google Scholar]
- Schramm, F.; Morel, G. Ensuring visibility in calibration-free path planning for image-based visual servoing. IEEE Trans. Robot. 2006, 22, 848–854. [Google Scholar]
- Maru, N.; Kase, H.; Yamada, S.; Nishikawa, A.; Miyazaki, F. Manipulator control by visual servoing with stereo vision. Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Yokohama, Japan; 1993; pp. 1866–1870. [Google Scholar]
- Cervera, E.; Berry, F.; Martinet, P. Stereo Visual Servoing with a Single Point: a Comparative Study. Proceedings of the IEEE International Conference on Advanced Robotics, Budapest, Hungary; 2001; pp. 213–218. [Google Scholar]
- Cervera, E.; Martinet, P. Stacking jacobians properly in stereo visual servoing. Proceedings of the IEEE International Conference on Robotics and Automation, Seoul, Korea; 2001; pp. 717–722. [Google Scholar]
- Cervera, E.; Berry, F.; Martinet, P. Is 3D useful in stereo visual control? Proceedings of the IEEE International Conference on Robotics and Automation, Washington, DC, USA; 2002; pp. 1630–1635. [Google Scholar]
- Recatala, G.; Sanz, P.J.; Cervera, E.; del Pobil, A.P. Filter-based control of a gripper-to-object positioning movement. Proceedings of the IEEE International Conference on Systems, Man and Cybernetics, The Hague, The Netherlands, October, 2004; pp. 5423–5428.
- Mejias, L.; Saripalli, S.; Campoy, P.; Sukhatme, G.S. Visual servoing of an autonomous helicopter in urban areas using feature tracking. J. Field Robot. 2006, 23, 185–199. [Google Scholar]
- Mejias, L.; Correa, J.F.; Mondragon, I.; Campoy, P. COLIBRI: A vision-guided UAV for surveillance and visual inspection. Proceedings of the IEEE International Conference on Robotics and Automation, Rome, Italy, April, 2007; pp. 2760–2761.
- Campoy, P.; Correa, J.F.; Mondragon, I.; Martinez, C.; Olivares, M.; Mejias, L.; Artieda, J. Computer Vision Onboard UAVs for Civilian Tasks. Proceedings of the International Symposium on Unmanned Aerial Vehicles, Orlando, FL, USA, June, 2008; pp. 105–135.
- Nickels, K.; Hutchinson, S. Model-based tracking of complex articulated objects. IEEE Trans. Robot. Autom. 2001, 17, 28–36. [Google Scholar]
- Isard, M.; Blake, A. CONDENSATION—Conditional Density Propagation for Visual Tracking. Int. J. Comput. Vis. 1998, 29, 5–28. [Google Scholar]
- Papanikolopoulos, N.P.; Khosla, P.K. Adaptive robotic visual tracking: theory and experiments. IEEE Trans. Automat. Contr. 1993, 38, 429–445. [Google Scholar]
- Pomares, J.; Gil, P.; Torres, F. 2D Visual servoing with integration of multiple predictions of movement based on Kalman filter. Proceedings of the 15th IFAC World Congress, Barcelona, Spain; 2002; pp. 12–16. [Google Scholar]
- Pomares, J.; Torres, F.; Gil, P. Visual servoing and force control fusion for complex insertion tasks. Proceedings of the 11th International Conference on Advanced Robotics, Coimbra, Portugal, June, 2003; pp. 357–362.
- Perez, C.; Garcia, N.; Sabater, J.M.; Azorin, J.M.; Reinoso, O.; Gracia, L. Improvement of the visual servoing task with a new trajectory predictor—The Fuzzy Kalman Filter. Proceedings of the 4th International Conference on Informatics in Control, Automation and Robotics, Angers, France, May, 2007; pp. 133–140.
- Bensalah, F.; Chaumette, F. Compensation of abrupt motion changes in target tracking by visual servoing. Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Pittsburgh, PA, USA, August, 1995; pp. 181–187.
- Pomares, J.; Garcia, G.J.; Torres, F. Improving tracking trajectories with motion estimation. Proceedings of the 3rd International Conference on Informatics in Control, Automation and Robotics, Setubal, Portugal, August, 2006; pp. 97–103.
- Perez-Vidal, C.; Gracia, L.; Garcia, N.; Cervera, E. Visual control of robots with delayed images. Adv. Robot. 2009, 23, 725–745. [Google Scholar]
- Kobayashi, A.S. Society for experimental mechanics. In Handbook on Experimental Mechanics, 2nd ed.; Prentice-Hall: Englewood Cliffs, NJ, USA, 1987. [Google Scholar]
- Cervera, E.; del Pobil, A.P.; Marta, E.; Serna, M.A. Perception-based learning for motion in contact in task planning. J. Intell. Robot. Syst. 1996, 17, 283–308. [Google Scholar]
- Garcia, J.G.; Robertsson, A.; Ortega, J.G.; Johansson, R. Sensor fusion for compliant robot motion control. Proceedings of the IEEE International Conference on Robotics and Automation, Barcelona, Spain, April, 2005; pp. 430–441.
- Garcia, J.G.; Robertsson, A.; Ortega, J.G.; Johansson, R. Contact force estimation for complaint robot motion control. Rev. Iberoam. Autom. Inform. Ind. 2007, 4, 70–82. [Google Scholar]
- Garcia, J.G.; Robertsson, A.; Ortega, J.G.; Johansson, R. Self-calibrated robotic manipulator force observer. Robot. Comput.-Integr. Manuf. 2009, 25, 366–378. [Google Scholar]
- Uchiyama, M.; Kitagaki, K. Dynamic force sensing for high-speed robot manipulation using Kalman filtering techniques. Proceedings of the 28th IEEE Conference on Decision and Control, Tampa, FL, USA, December, 1989; pp. 2147–2152.
- Garcia, J.G.; Robertsson, A.; Ortega, J.G.; Johansson, R. Automatic calibration procedure for a robotic manipulator force observer. Proceedings of the IEEE International Conference on Robotics and Automation, Barcelona, Spain, April, 2005; pp. 2703–2708.
- Fraile, J.C.; Perez-Turiel, J.; Gonzalez-Sanchez, J.L.; Lopez-Cruzado, J.; Rodriguez, J.L. Experiences in the development of a robotic application with force control for bone drilling. Rev. Iberoam. Autom. Inform. Ind. 2008, 5, 93–106. [Google Scholar]
- Galvez, J.A.; de Santos, P.G.; Armada, M. A force controlled robot for agile walking on rough terrain. Proceedings of the IFAC Workshop on Intelligent Components for Vehicles, Seville, Spain, March, 1998; Ollero, A., Ed.; Pergamon Press Ltd: Kidlington, UK, 1998; pp. 217–222. [Google Scholar]
- Montes, H.; Nabulsi, S.; Armada, M.A. Reliable, built-in, high-accuracy force sensing for legged robots, Proceedings of the 7th International Conference on Climbing and Walking Robots, Madrid, Spain, September, 2004; Sage Publications Ltd: Thousand Oaks, CA, USA, 2004; pp. 931–950.
- Garcia, A.; Feliu, V.; Somolinos, J.A. Experimental testing of a gauge based collision detection mechanism for a new three-degree-of-freedom flexible robot. J. Robot. Syst. 2003, 20, 271–284. [Google Scholar]
- Payo, I.; Feliu, V.; Cortazar, O.D. Force control of a very lightweight single-link flexible arm based on coupling torque feedback. Mechatronics 2009, 19, 334–347. [Google Scholar]
- Nabulsi, S.; Sarria, J.F.; Montes, H.; Armada, M.A. High-resolution indirect feet-ground interaction measurement for hydraulic-legged robots. IEEE Trans. Instrum. Meas. 2009, 58, 3396–3404. [Google Scholar]
- Jinjun, S.; Dong, S.; Dun, L. Design for robust component synthesis vibration suppression of flexible structures with on-off actuators. IEEE Trans. Robot. Autom. 2004, 20, 512–525. [Google Scholar]
- Suarez, R.; Basanez, L.; Rosell, J. Using configuration and force sensing in assembly task planning and execution. Proceedings of the IEEE International Symposium on Assembly and Task Planning, Pittsburgh, PA, USA, August, 1995; pp. 273–279.
- Villani, L.; De Schutter, J. Force control. In Handbook of Robotics; Siciliano, B., Khatib, O., Eds.; Springer: Berlin, Germany, 2008; pp. 161–185. [Google Scholar]
- De Fazio, T.L.; Seltzer, D.S.; Whitney, D.E. The instrumented remote center of compliance. Ind. Rob. 1984, 11, 238–242. [Google Scholar]
- Hogan, N. Impedance control—an approach to manipulation. I–Theory. II–Implementation. III–Applications. ASME J. Dyn. Syst. Meas. Control 1985, 107, 1–24. [Google Scholar]
- Lawrence, D.A. Impedance control stability properties in common implementations. Proceedings of the IEEE International Conference on Robotics and Automation, Philadelphia, PA, USA, April, 1988; pp. 1185–1190.
- Galvez, J.A.; Estremera, J.; de Santos, P.G. A new legged-robot configuration for research in force distribution. Mechatronics 2003, 13, 907–932. [Google Scholar]
- Garcia, J.G.; Ortega, J.G.; Nieto, L.N.; Garcia, A.S. Design and validation of an open architecture for an industrial robot. Proceedings of the IEEE International Symposium on Industrial Electronics, Vigo, Spain, June, 2007; pp. 2004–2009.
- Valera, A.; Benimeli, F.; Solaz, J.; De Rosario, H.; Robertsson, A.; Nilsson, K.; Zotovic, R.; Mellado, M. Development of an experimental test bench by means of force control in an industrial robot for the analysis of the mechanical response in car seats. Rev. Iberoam. Autom. Inform. Ind. 2009, 6, 49–58. [Google Scholar]
- Puente, S.T.; Torres, F. Automatic screws removal in a disassembly process. Proceedings of the 1st CLAWAR/EURON Workshop on Robots in Entertainment, Leisure and Hobby, Vienna, Austria; 2004; pp. 212–216. [Google Scholar]
- Raibert, M.; Craig, J. Hybrid position/force control of manipulators. ASME J. Dyn. Syst. Meas. Control 1981, 102, 126–133. [Google Scholar]
- Mason, M.T. Compliance and force control for computer controlled manipulators. IEEE Trans. Syst. Man Cybern. 1981, 11, 418–432. [Google Scholar]
- Bruyninckx, H.; De Schutter, J. Specification of force-controlled actions in the “task frame formalism”—a synthesis. IEEE Trans. Robot. Autom. 1996, 12, 581–589. [Google Scholar]
- Prats, M.; Wieland, S.; Asfour, T.; Del Pobil, A.P.; Dillmann, R. Compliant interaction in household environments by the armar-III humanoid robot. Proceedings of the 8th IEEE -RAS International Conference on Humanoid Robots, Daejeon, Korea, December, 2008; pp. 475–480.
- Amat, J.; Frigola, M.; Casals, A. Human robot interaction from visual perception. Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Sendai, Japan, September, 2004; pp. 1997–2002.
- Patarinski, S.P.; Botev, R.G. Robot force control: a review. Mechatronics 1993, 3, 377–398. [Google Scholar]
- Canny, J.; Reif, J. New lower bound techniques for robot motion planning problems. Proceedings of the 28th Annual Symposium on Foundations of Computer Science, Los Angeles, CA, USA, October, 1987; pp. 49–60.
- Cervera, E.; Del Pobil, A.P. Sensor-based learning for practical planning of fine motions in robotics. Inf. Sci. 2002, 145, 147–168. [Google Scholar]
- Lee, M.H.; Nicholls, H.R. Review Article Tactile sensing for mechatronics—a state of the art survey. Mechatronics 1999, 9, 1–31. [Google Scholar]
- Cutkosky, M.R.; Howe, R.D.; Provancher, W.R. Force and tactile sensors. In Handbook of Robotics; Siciliano, B., Oussama, K., Eds.; Springer-Verlag: Berlin, Germany, 2008; pp. 455–476. [Google Scholar]
- Howe, R.D.; Cutkosky, M.R. Dynamic tactile sensing: perception of fine surface features with stress rate sensing. IEEE Trans. Robot. Autom. 1993, 9, 140–151. [Google Scholar]
- Puangmali, P.; Althoefer, K.; Seneviratne, L.D.; Murphy, D.; Dasgupta, P. State-of-the-art in force and tactile sensing for minimally invasive surgery. IEEE Sens. J. 2008, 8, 371–380. [Google Scholar]
- Dahiya, R.S.; Valle, M. Tactile sensing for robotic applications. In Sensors, Focus on Tactile, Force and Stress Sensors; Rocha, J.G., Lanceros-Mendez, S., Eds.; IN-TECH: Vienna, Austria, 2008; pp. 298–304. [Google Scholar]
- Tegin, J.; Wikander, J. Tactile sensing in intelligent robotic manipulation—a review. Ind. Rob. 2005, 32, 64–70. [Google Scholar]
- Bicchi, A. Intrinsic contact sensing for soft fingers. Proceedings of the IEEE International Conference on Robotics and Automation, Cincinnati, OH, USA, May, 1990; pp. 968–973.
- Galvez, J.A.; De Santos, P.G.; Pfeiffer, F. Intrinsic tactile sensing for the optimization of force distribution in a pipe crawling robot. IEEE/ASME Trans. Mechatron. 2001, 6, 26–35. [Google Scholar]
- Jimenez, A.R.; Soembagijo, A.S.; Reynaerts, D.; Van Brussel, H.; Ceres, R.; Pons, J.L. Featureless classification of tactile contacts in a gripper using neural networks. Sens. Actuators, A, Phys. 1997, 62, 488–491. [Google Scholar]
- Pedreno-Molina, J.L.; Guerrero-Gonzalez, A.; Garcia-Cordova, F.; Lopez-Coronado, J. A neural estimator of object stiffness applied to force control of a robotic finger with opponent artificial muscles. Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics, Tucson, AZ, USA, October, 2001; pp. 3025–3030.
- Pedreno-Molina, J.L.; Guerrero-Gonzalez, A.; Calabozo-Moran, J.; Lopez-Coronado, J.; Gorce, P. A neural tactile architecture applied to real-time stiffness estimation for a large scale of robotic grasping systems. J. Intell. Robot. Syst. 2007, 49, 311–323. [Google Scholar]
- Morales, A.; Prats, M.; Sanz, P.; Pobil, A.P. An Experiment in the Use of Manipulation Primitives and Tactile Perception for Reactive Grasping. Proceedings of the RSS Workshop on Robot Manipulation: Sensing and Adapting to the Real World, Atlanta, GA, USA, June, 2007; pp. 1–7.
- Rodriguez-Cheu, L.E.; Casals, A. Sensing and control of a prosthetic hand with myoelectric feedback. Proceedings of the IEEE/RAS-EMBS International Conference on Biomedical Robotics and Biomechatronics, Pisa, Italy, February, 2006; pp. 607–612.
- Rodriguez-Cheu, L.E.; Gonzalez, D.; Rodriguez, M. Result of a perceptual feedback of the grasping forces to prosthetic hand users. Proceedings of the 2nd Biennial IEEE/RAS-EMBS International Conference on Biomedical Robotics and Biomechatronics, Scottsdale, AZ, USA, October, 2008; pp. 901–906.
- Maldonado-Lopez, R.; Vidal-Verdu, F.; Linan, G.; Rodriguez-Vazquez, A. Integrated circuitry to detect slippage inspired by human skin and artificial retinas. IEEE Trans. Circuits. Syst. I Regul. Pap. 2009, 56, 1554–1565. [Google Scholar]
- Pomares, J.; Garcia, G.J.; Torres, F. A robust approach to control robot manipulators by fusing visual and force information. J. Intell. Robot. Syst. 2007, 48, 437–456. [Google Scholar]
- Pomares, J.; Gil, P.; Garcia, G.J.; Sebastian, J.M.; Torres, F. Improving detection of surface discontinuities in visual-force control systems. Image Vis. Comput. 2008, 26, 1435–1447. [Google Scholar]
- Pomares, J.; Garcia, G.J.; Paya, L.; Torres, F. An uncalibrated approach to track trajectories using visual-force control. Proceedings of the 2nd International Conference on Informatics in Control, Automation and Robotics, Barcelona, Spain, September, 2005; pp. 103–108.
- Prats, M.; Martinet, P.; Del Pobil, A.P.; Lee, S. Vision/force control task-oriented grasping and manipulation. Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, San Diego, CA, USA, October, 2007; pp. 1320–1325.
- Prats, M.; Martinet, P.; Del Pobil, A.P.; Lee, S. Robotic execution of everyday tasks by means of external vision/force control. Intell. Serv. Robot. 2008, 1, 253–266. [Google Scholar]
- Garcia, G.J.; Pomares, J.; Torres, F. Robot guidance by estimating the force-image interaction matrix. Proceedings of the 8th IFAC International Workshop on Intelligent Manufacturing Systems, Alicante, Spain; 2007; pp. 132–137. [Google Scholar]
- Gil, P.; Pomares, J.; Puente, S.; Candelas, F.A.; Garcia, G.J.; Corrales, J.A.; Torres, F. A cooperative robotic system based on multiple sensors to construct metallic structures. Int. J. Adv. Manuf. Technol. 2009, 45, 1–15. [Google Scholar]
- Pomares, J.; Torres, F. Movement-flow-based visual servoing and force control fusion for manipulation tasks in unstructured environments. IEEE Trans. Syst. Man Cybern. Part C-Appl. Rev. 2005, 35, 4–15. [Google Scholar]
- Prats, M.; Ramos-Garijo, R.; Sanz, P.J.; Del Pobil, A.P. Recent progress in the UJI librarian robot. Proceedings of the IEEE International Conference on Systems, Man and Cybernetics, The Hague, The Netherlands, October, 2004; pp. 5227–5232.
- Prats, M.; Sanz, P.J.; del Pobil, A.P. Perception-based search and manipulation in a semi-structured environment. Proceedings of the 12th International Conference on Advanced Robotics, Seattle, WA, USA, July, 2005; pp. 749–754.
- Pedreno-Molina, J.L.; Guerrero-Gonzalez, A.; Lopez-Coronado, J. A neural controller for a robotic hand with artificial tactile skins in grasping tasks. Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics, Nashville, TN, USA, October, 2000; pp. 161–165.
- Lopez-Coronado, J.; Pedreno-Molina, J.L.; Guerrero-Gonzalez, A.; Gorce, P. A neural model for visual-tactile-motor integration in robotic reaching and grasping tasks. Robotica 2002, 20, 23–31. [Google Scholar]
- Prats, M.; Sanz, P.J.; de Pobil, A.P. Vision-Tactile-Force Integration and Robot Physical Interaction. Proceedings of the IEEE International Conference on Robotics and Automation, Kobe, Japan, May, 2009; pp. 3975–3980.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. | Sensors | Technique | Application |
|---|---|---|---|
| [9] | Eye-in-hand configuration. | Feedforward neural network. | Industrial inspection. |
| [10] | Eye-in-hand configuration. | Reinforcement learning-based neural network. | Grasping of an object on a table. |
| [11] | Eye-in-hand configuration | Reinforcement learning-based neural network. | Autonomous submarine for underwater cable inspection tasks |
| [12] | Eye-in-hand configuration. | Discrete time Cellular Neural Networks | Test of the proposed visual servoing scheme. |
| [14] [15] | Eye-in-hand and eye-to-hand configuration. | Image-based visual servoing. | Visual servoing open architecture. |
| [16] | Simulated camera. | - Image-based visual servoing. - Position-based visual servoing. | Visual servoing simulator in Matlab/Simulink. |
| [17] | Eye-in-hand configuration. | Position-based visual servoing with change of the camera-object frame. | Simple tests of the proposed approach. |
| [18] [43] | Eye-in-hand mono and stereo rig configuration. | - Image-based visual servoing. - Position-based visual servoing. | Test of the proposed algorithms. |
| [19] | Eye-in-hand stereo rig configuration. | - Stereo image-based visual servoing with 2D point and major axis orientation features. - Position-based visual servoing. | Testbed for a classic position-based scheme. |
| [20] | Eye-in-hand configuration. | Position-based visual servoing. | Testbed for a classic position-based scheme. |
| [21] | Eye-in-hand configuration. | - Position-based visual servoing. -Motion object estimator. | Test of the proposed controller. |
| [22] | Eye-to-hand configuration. | Position-based visual servoing. | Internet Tele-Lab for learning visual servoing techniques. |
| [23] | Eye-in-hand configuration. | Position-based visual servoing. | Testbed for an autonomous satellite repairer. |
| [24] | Eye-in-hand configuration. | Position-based direct visual servoing. | Visual control of a 2 degree of freedom robot. |
| [25] [26] [27] | Eye-in-hand configuration. | - Position-based direct visual servoing. - Motion object estimator. | RoboTenis: a parallel robot playing table tennis. |
| [28] | Eye-in-hand configuration | -Position-based visual servoing based on the scene reconstruction using homographies | Mobile robot navigation |
| [32] [33] [34] | Eye-to-hand stereo rig configuration. | Image-based visual servoing from online estimated interaction matrix by using the properties of the epipolar geometry. | Test of the proposed online interaction matrix estimation. |
| [35] | Eye-in-hand | Image based visual servoing with a complete interaction matrix without stability problems and using head movements if a stability problem is detected | Aibo visual control to track the ball in a RoboCup soccer match |
| [36] | Eye-in-hand configuration. | Image-based visual servoing with online camera calibration. | Test of the proposed algorithm. |
| [39] [40] [41] | Eye-in-hand configuration. | Image-based visual servoing solving the visibility problem. | Test of visual servoing tasks with outliers. |
| [42] | Eye-to-hand fisheye stereo ring configuration. | Image-based visual servoing with panoramic cameras. | Safety issues for a robot arm moving in close proximity to human beings. |
| [44] [45] [46] | Eye-in-hand configuration. | Image-based visual servoing with structured light external visual features. | Plane-to-plane positioning tasks. |
| [48] | Eye-in-hand configuration. | Image-based visual servoing based on the homography decomposition. | Simulation of the proposed control scheme. |
| [49] | Eye-in-hand configuration | - Switched homography-based visual control | Mobile robot navigation |
| [50] | Eye-in-hand configuration | - Image-based visual servoing with epipole geometry as visual features. - Switching control law to deal with the motion constraints of the platform | Mobile robot navigation |
| [51] | Eye-in-hand configuration | Image-based visual servoing with epipoles as visual features | Mobile robot navigation |
| [52] | Eye-in-hand configuration | Motion estimator from multiple planar homographies | Vision based control of unmanned aerial vehicles (UAV) |
| [53] | Eye-in-hand configuration | - Image-based visual servoing with epipole geometry as visual features. - Sliding mode control to resolve the singularities due to the decoupling of the matrix of the system | Mobile robot navigation |
| [54] | Eye-in-hand configuration | Tracking of a line with Kalman filter predictor | Autonomous submarine for underwater cable inspection tasks |
| [55] [56] | Eye-in-hand camera configuration. | - Image-based visual servoing. - Image path tracker based on movement flow. | Tracking of predefined paths. |
| [57] [58] | Eye-in-hand camera configuration. | - Image-based visual servoing. - Image path tracker based on virtual visual servoing. | Tracking of predefined paths in the change of a fault light bulb. |
| [61] [62] | Eye-in-hand stereo rig configuration. | - Stereo image-based visual servoing with stacked-mono and stereo-real interaction matrices. - Position-based visual servoing. | Test of the proposed algorithms. |
| [63] | Eye-in-hand stereo rig configuration. | - Stereo image-based visual servoing with disparity features. - Position-based visual servoing. | Test of the proposed algorithms. |
| [64] | Eye-in-hand stereo rig configuration. | Stereo image-based visual servoing with grasping points features. | Grasping of different objects. |
| [65] [66] [67] | Eye-in-hand configuration | - Image-based visual servoing. - Tracking of the features by using Lucas-Kanade approach. | Visual servoing of an autonomous helicopter |
| [71] | Eye-to-hand configuration. | - Image-based visual servoing. - Motion object estimator. | Automatic chaser car in a slot game. |
| [72] | Eye-in-hand configuration. | - Image-based visual servoing. - Motion object estimator. | Peg-in-hole task in motion. |
| [73] | Eye-in-hand configuration. | - Image-based visual servoing. - Motion object estimator. | Tests of the proposed motion estimator. |
| [75] | Eye-in-hand configuration | - Image-based visual servoing. - Motion object estimator. | Tracking of a desired path in the image. |
| [76] | Eye-in-hand configuration | - Image-based visual servoing. - Motion object estimator. | Tracking of a mobile object placed at a turntable. |
| Ref. | Sensors | Technique | Application |
|---|---|---|---|
| [78] | Wrist six axis force/torque sensor. | Neural networks. | Fine motion assembly tasks. |
| [79] [80] | Wrist DSP-based six axis force/torque sensor. | Impedance control. | Test of a contact force estimator. |
| [81] [83] | Wrist six axis force/torque sensor. | Impedance control. | Test of a self-calibrated contact force estimator. |
| [84] | Wrist six axis force/torque sensor. | Hybrid force/motion control. | Bone drilling in a surgical repairing task. |
| [86] [89] | Built-in strain gauges. | Proportional pure force control. | Control of a climbing and walking robot. |
| [88] | Built-in strain gauge placed at the beginning of the link. | - Switch motion/force control. - Modified PID force control. | Control of free and constrained motion of a flexible robot. |
| [91] | Wrist force/torque sensor. | Geometric analytical models. | Fine motion assembly tasks. |
| [96] | Built-in strain gauges. | Admittance control with the force controller in the joint space. | Control of a legged-robot. |
| [97] | Wrist six axis force/torque sensor. | - Impedance control. - Hybrid force/motion control. | Open software architecture to test robot interaction tasks. |
| [98] | Wrist six axis force/torque sensor. | - Different direct force control schemes. - Impedance control. | Test architecture for the analysis of the mechanical response in car seats. |
| [99] | Wrist six axis force/torque sensor. | Proportional pure force control. | Screwing in an assembly task. |
| [103] | Wrist six axis force/torque sensor. | - Impedance control. - Hybrid force/motion control. | Robot humanoid for household furniture common tasks. |
| [104] | Wrist six axis force/torque sensor. | Hybrid force/motion control. | Service robot for shaving and feeding tasks. |
| [107] | Wrist-mounted strain gauges. | Neural networks | Fine motion assembly tasks. |
| Sensor Types | Technologies | Physical Properties | Robot Configuration |
|---|---|---|---|
| Pressure sensing arrays | - Capacitive - Piezoresistive - Optical | Static (normal pressure) | Extrinsic |
| Skin deflection sensors | - Conductive rubbers - Piezoresistive strain gauges - Optical | Static (deformation) | |
| Dynamic tactile sensors | - Piezoelectric transducers - Accelerometers - Piezoelectric stress sensors | Dynamic (vibration, stress) | |
| Fingertip force/torque sensors | - Piezoresistive strain gauges | Static (force/torque) | Intrinsic |
| Ref. | Sensors | Technique | Application |
|---|---|---|---|
| [115] | Built-in force/torque sensor based on strain gauges. | Intrinsic tactile sensing for normal vector computation. | Pipe crawling robot. |
| [116] | Fingertip 16×16 conductive rubber contact layer. | Method with 3 phases: noise cancellation, image processing and classification by a LVQ network. | Classification of the local shapes of objects gripped by a robotic hand. |
| [117] [118] | - Artificial skin on a parallel robotic gripper. - Force fingertip sensor on a robotic finger with muscles. | Neural network organized as a topographic map of joint positions and contact forces. | Grasping of objects of different stiffness with a predefined force. |
| [119] | - Three fingertip 8×5 pressure sensing arrays. - Wrist force/torque sensor. | Force-pressure control law for controlling the applied force and maximizing the contact surface. | Robotic assistant that picks up books in a library. |
| [120] [121] | - Four FSRs. - Accelerometers. - Piezoelectric sensors. | Control algorithm which detects grasping events from sensor data and generates the user's feedback. | Clinical prosthesis which provides the user with feedback. |
| [122] | - 16×16 Array of piezoresistive tactile sensors. - Signal conditioning circuit. - FPGA | Algorithm implemented in a FPGA which detects slipping according to the number and duration of the digital pulses obtained from the tactile sensors. | Slipping detection alarm for manipulation tasks. |
| Ref. | Sensors | Technique | Application |
|---|---|---|---|
| [58] [128] [129] | - Wrist six axis force/torque sensor. - Eye-in-hand camera configuration. | - Shared visual-force control based on the force-image interaction matrix. - Time-independent image path tracker based on virtual visual servoing. | Change of a faulty bulb in a streetlamp. |
| [72] | - Wrist six axis force/torque sensor. - Eye-in-hand camera configuration. - Eye-to-hand camera configuration. | - Impedance visual/force control. - General weighted shared control. | Peg-in-hole task in motion. |
| [123] | - Wrist six axis force/torque sensor. - Eye-in-hand camera configuration. | - Impedance visual/force control. - Image path modification based on the homography matrix. | Different interaction tasks tracking a desired path. |
| [124] | - Wrist six axis force/torque sensor. - Eye-in-hand camera configuration. | - Impedance visual/force control. - Surface discontinuities detection based on the homography matrix and structured light. | Different interaction tasks tracking a desired path in contact with an object. |
| [125] | - Wrist six axis force/torque sensor. - Eye-in-hand camera configuration. | Shared visual-force control. | Disassembly task. |
| [126] [127] | - Wrist six axis force/torque sensor. - Eye-in-hand camera configuration. | - Shared visual-force control. - Position-based visual servoing. | Service robot opening a door of a wardrobe. |
| [130] | - Wrist six axis force/torque sensor. - Eye-in-hand camera configuration. | - Shared visual-force control. - Time-independent image path tracker based on movement flow-based visual servoing. | Different interaction tasks tracking a desired path. |
| [131] [132] | - Wrist six axis force/torque sensor. - Eye-in-hand stereo rig camera configuration. | Visual/force hybrid control. | Library assistant robot. |
| [133] [134] | - Stereo-head with 5 d.o.f. - Two piezoresistive tactile skins on a robotic gripper. | Neural networks with VAM structure which relate visual and tactile data with joint positions. | Reaching and grasping tasks of unknown objects. |
| [135] | - Wrist six axis force/torque sensor. - 8×5 fingertip tactile array. - Eye-to-hand camera configuration. | Position-vision-tactile hybrid control modified by an impedance force control. | Service robot which opens a sliding door. |
© 2009 by the authors; licensee Molecular Diversity Preservation International, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Garcia, G.J.; Corrales, J.A.; Pomares, J.; Torres, F. Survey of Visual and Force/Tactile Control of Robots for Physical Interaction in Spain. Sensors 2009, 9, 9689-9733. https://doi.org/10.3390/s91209689
Garcia GJ, Corrales JA, Pomares J, Torres F. Survey of Visual and Force/Tactile Control of Robots for Physical Interaction in Spain. Sensors. 2009; 9(12):9689-9733. https://doi.org/10.3390/s91209689
Chicago/Turabian StyleGarcia, Gabriel J., Juan A. Corrales, Jorge Pomares, and Fernando Torres. 2009. "Survey of Visual and Force/Tactile Control of Robots for Physical Interaction in Spain" Sensors 9, no. 12: 9689-9733. https://doi.org/10.3390/s91209689