3.1. Structural Method of Algorithmic Error Correction
The structural method of error correction is based on insertion into the direct or feedback channel of measuring system of additional high-speed analog or digital units, which linearize the total non-linear transfer functions of the designed circuit [
13,
14]. We introduce an error correction method which combines the simplicity and speed of direct channel measurements and the high accuracy of feedback systems. For this, the output voltage and relative error vector of the active converter (see
Figure 1) with a presence of input cable capacitance
CK are calculated as:
where
A0 is the direct current gain of the OpAmp without feedback,
fT is the frequency of unity amplification,
f is the frequency of the test signal. For example, if
CK = 100 nF,
ω =
2πf = 6,280 s
−1,
YX = (1 +
i0) μS,
fT = 10
7 Hz then |
δ| ≈ 0.02%. The transfer function of the whole active conductance converter without frequency-range dependence may be presented as:
where
Y1,
Y2 are the active and reactive components of the converted conductance
YX, X1 =
Y1R0,
X2 =
Y2R0,
TF =
2πfCKR0,
K0 =
1/A0,
MF =
f/fT. The ideal transfer function is found now as
Gideal =
X1 +
iX2 and with
G1 =
Re(Gideal), G2 =
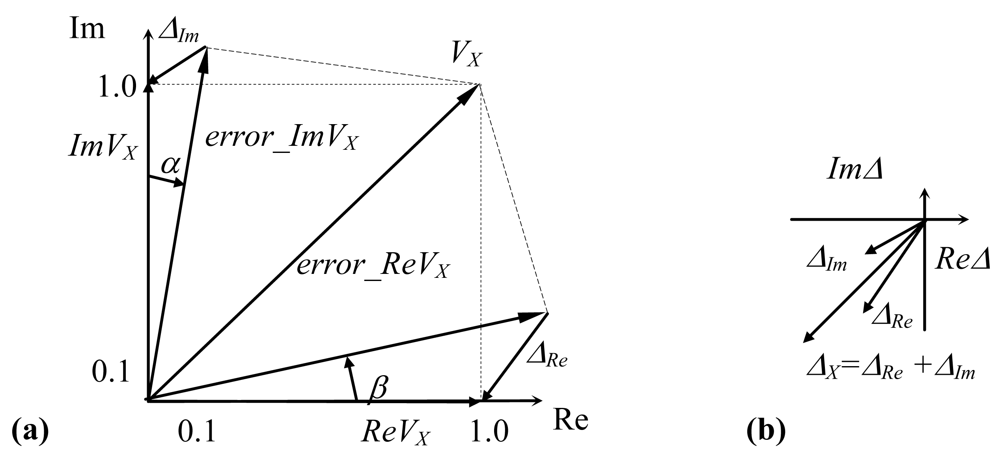
Im(Gideal), the relative error vector of conversion for active and reactive components may be found as:
Thus, the analysis of errors is reduced to computing the functions
ϕ1 and
ϕ2. On the basis of previous equations, active and reactive components of conversion errors are calculated (a detailed description of error analysis may be found in [
8]):
With the obtained
Equations (5), the components of error vectors have been calculated for different combinations between
X1 and
X2. For example, if in the measured structure the active component predominates, then
X1 = 1.0 and
X2 = 0.1; otherwise, if the reactive component predominates, then
X1 = 0.1 and
X2 = 1.0. Taking into account two non-linear equations for active and reactive components of conductance converters transfer function (
Equation 3) and applying their linearization according to:
the approximate solution for the correction algorithm is defined as:
In
Equations (7) the components in brackets are correction actions which must be added to corresponding components of the transfer functions
G1 and
G2 in order to obtain accurate results. These equations may be simplified without significant reduction of precision due to
1/A0≈
0:
Therefore, the improvement of metrological characteristics is achieved by computing components of the systematic error and its compensation by additional operations according to the described algorithm. We propose to name this technique the “structural algorithmic correction method”. The additional arithmetic operations in the
Equation 8 are implemented using analog adders and multipliers based on OpAmp. Input variables such as
R0 or
TF are simulated by reference direct-voltage dividers and frequency-to-voltage converters, respectively [
8].
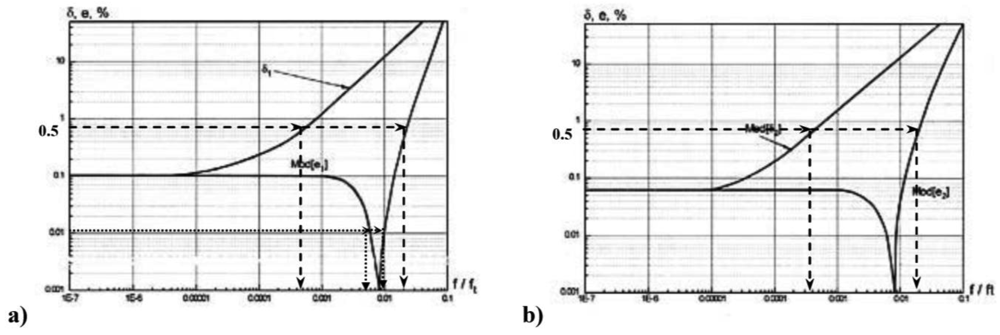
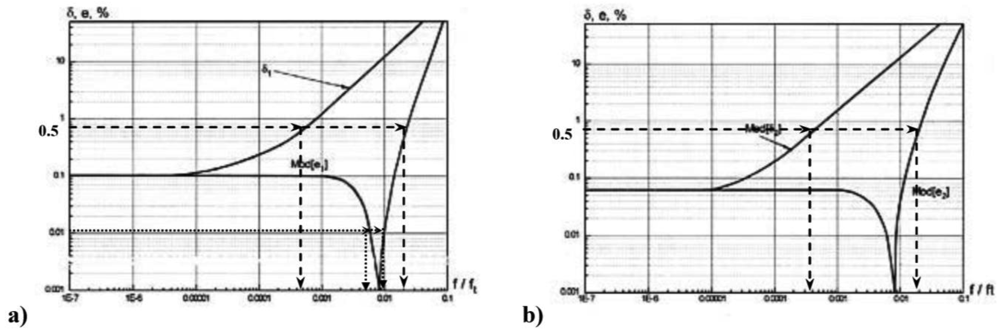
The plots for error behavior without the correction algorithm
δ1 and
δ2 according
Equation (5) are shown in
Figure 3 as the functions
δ1=
ϕ1(f/fT) and
δ2=
ϕ2(f/fT). In the same plot the results with correction
e1 and
e2 computed according to expression (9) are shown for conductance measuring converters, where:
In a wide range of frequencies, the errors of the measuring converter sometimes change their sign, so the absolute values of errors
Mod[
e1],
Mod[
e2] are presented in
Figure 3.
Analysis of errors has been made for cheap OpAmp with a small gain factor
A0 = 20,000, the frequency of unitary amplification
fT = 10 MHz, and test signal frequency range from
f = 1 Hz to 1 MHz corresponding to
MF = 10
−7−10
−1. The results of the experiments presented in
Figure 3 show specific intervals of frequencies, where the error can be less than 0.001%. For example, in order to achieve an error of about 0.01%, the measurements must be done in the 40–100 kHz frequency range. This interval depends on the parameters of OpAmp, the magnitude of the reference resistor, and the frequency of the test signal. Therefore, the low error band may be computed and selected for a particular application! As result, it is possible to design cheap and high performance impedance meters with very low errors.
Another unexpected result of implementation of the structural algorithmic correction method is the measurement frequency range extension with the same level of errors. For example, a measurement error of 0.5% without correction (curves
δ1 and
δ2) can be achieved only in the frequency interval up to
f/fT ≈ 0.0003/0.0004 (
f ≈ 3/4 kHz). For conductance conversion with correction, the errors
e1 and
e2 have the same level up to the frequency interval
f/fT ≈ 0.02 (
f ≈ 200 kHz). This means that the error correction method reduces the error level and maintains it in a wide test signal frequency range. In the previous example with a conductance converter the frequency extension covers two orders of magnitude; this is significant improvement! Another advantage of the structural algorithmic correction method is that the measurements are performed without speed reduction (during the same measurement cycle). The propagation delay for analog correction circuits (in the worst case: hundreds of microseconds) does not have a significant effect over measurements in millisecond cycles. Moreover, the impedance meter is quite cheap due to the basic quality of electronic components used in measuring converters and correction unit. For example, as shown in
Figure 3, errors as low as 0.001% have been achieved with OpAmps with a gain factor only about 20,000 (modern OpAmps have
A0 gain factors of more than 10
6).
The principal disadvantage of this method is that a correction unit can be a complex circuit because it must support many arithmetic operations for generation of corrective actions. This problem may be solved by standardization and unification of analog circuits for simple arithmetic operations in high-scale integrated circuits. There is no correlation between measured active (real) and reactive (imaginary) components of measured value as well as between the components of systematic errors that appear during impedance measuring processes. This is because the result basically depends on the physical characteristics of the measured value and not on the proportion between real and imaginary parts of measured value. If a measured value is a characteristic of semiconductor structure, the impedance measured components are better used for describing its features, such as substrate doping, flat band voltage, mobile ion concentration, series of resistance effects, charge densities, loss in the MOS structure due to charging and discharging of interface traps, etc.
The structural algorithmic correction method has been introduced for linearization of the transfer function of a complex conductance measuring converter. However it is only the first stage of the measurements. The consecutive vector-scalar and analog-to-digital converters introduce non-linear errors which must be removed by their own correction structures that may occupy more than 30% of all the measuring equipment. As usual, these structures are simple to implement and may be used for incrementing the performance of cheap measuring systems.
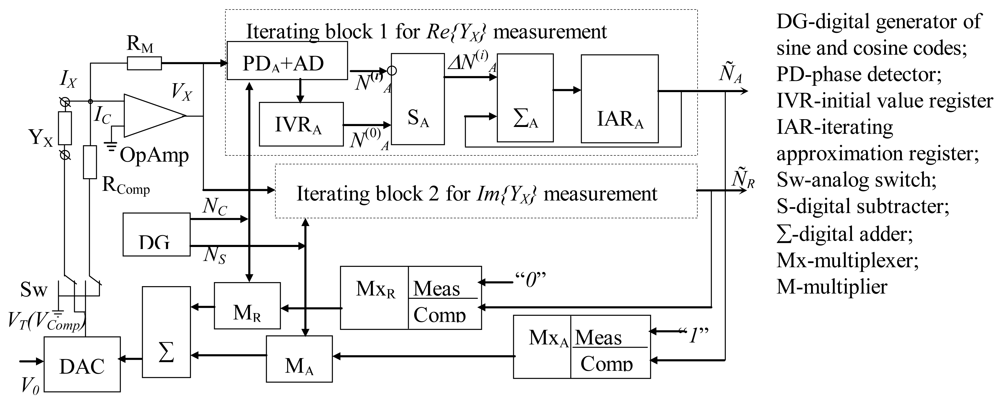
3.2. Iterating Correction Method
In order to explore the power of other error correction techniques an iterating compensation method is also proposed. Iterating methods use error correction units incorporated into the feedback channel which generates correction signals according to the results of previous measurement steps [
15]. The functional block diagram of the proposed system is shown in
Figure 4. The system consists of a digital generator (DG) of orthogonal signals, a measuring unit of varying configuration with OpAmp for direct measurement and iterating correction modes, a direct channel for measuring the active and reactive components with its corresponding ADCs, two iterating blocks for active and reactive components, and feedback units for the generation of compensation voltages. The measuring circuit formed by an active converter of conductance
YX generates a proportional complex current
IX and then transfers it into a complex voltage
VX. In other words, this circuit is a vector converter, which consists of an OpAmp with scale feedback resistor
RM, compensation resistor
RComp, and switch Sw. DG forms orthogonal sine and cosine signals which are defined by two 10-bits codes for sine
NS and cosine
NC functions:
where
k is the number of clock pulses, and
f is test signal frequency. These codes are used as reference signals for phase detectors (PD), for generation of analog test (
VT) and compensation (
VComp) voltages. The measurement process is divided into two steps: impedance measurement without correction and iterative correction of the result. First, the sine
VT voltage is generated at the output of DAC by a look-ahead digital adder Σ. For this, the multiplier M
A repeats the sine codes
NS(
kT) on its output because the set of ones “
1” from measurement mode “
Meas” of M
A is selected. These ones repeat the codes
NS (sine signal) in the output of M
A in measurement mode. The cosine signal codes are multiplied by zero from input “
Meas” of M
R. Therefore, the
VT is computed as
VT(
kT)=
bV0cos(2
πkTf) where
b is the transfer coefficient and
V0 is the reference voltage of DAC.
VT is applied to the measured impedance
YX through switch Sw. The output voltage
VX and transfer function
GVC of vector converter are obtained as:
where
YA and
YR are active and reactive components of measured value
YX, fT is the frequency of unitary amplification, and
CK is capacitance of the input cable.
The phase sensitive detectors PD
A, PD
R convert
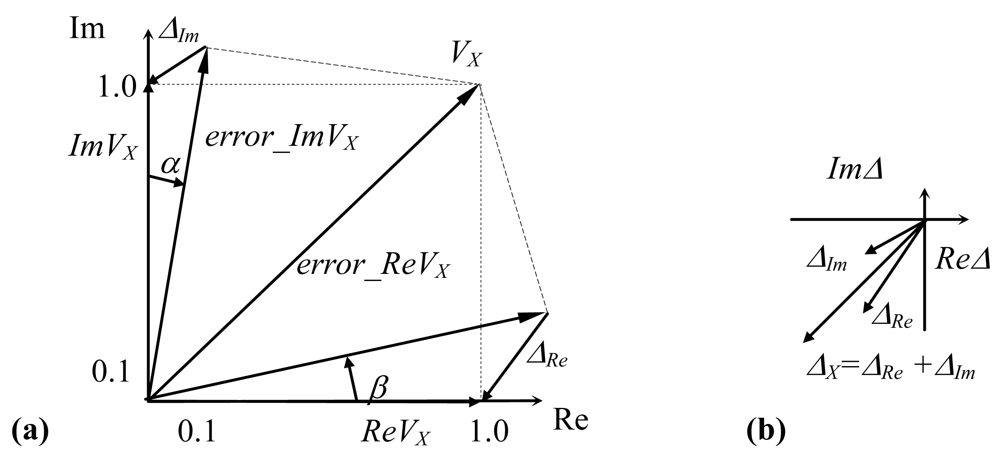
VX into active and reactive components by comparing them with the signals of DG in phase and with a 90° phase shift (sine and cosine signals codes). This conversion is described by equations:
where
c is the transfer coefficient of the phase detector,
ψA and
ψR are parasitic phase shifts during the selection of active and reactive components (in
Figure 1 they are the angles
α and
β),
tD is internal comparator delays,
S is the speed of increasing the output voltage of OpAmp.
The digital codes of the measured components are obtained by ADC
A and ADC
R with their nominal transfer coefficient
qN, and absolute additive
ΔAd and relative multiplicative
δMul errors:
The magnitudes of components
NA and
NR are stored into the initial values registers IVR
A, IVR
R and into the iterating approximation registers IAR
A, IAR
R for iterating compensation cycles. These codes may be used as final results of the measurements. If higher accuracy is required of the results, the iterating process is applied. The total errors of first impedance measurement components are computed according to (13) as:
where
αN is the nominal coefficient of direct channel transfer. In
Table 1, the relative errors
δ(0)A, δ(0)R of conductance
YX = (100 +
i100)
S measurements are shown,
RK = 1 kΩ,
fT = 10 MHz,
S = 50 V/mks,
tD = 10
ns, scale-resistor non-stability
δM = 5%,
ΔA = 0.5 units of the least significant digit.
Iterating error correction begins with the generation of the first iterating compensation voltage
V(1)Comp based on the codes
N(0)A and
N(0)R from IAR
A, IAR
R. After the modulation of these codes by DG-codes producing
NC(kT) and
NS(kT) the magnitude of the first compensation voltage is found as:
The voltage from
Equation (15) through the normally closed contacts of Sw is applied to the compensation resistor R
Comp. The output voltage
V(1)X of measuring converter is appears as:
The first iterating approximation result of
V(1)X is found after analog-to-digital conversion as:
The feedback iterating blocks, which consist of IVRs, IARs, subtractors S
A, S
R, and adders Σ
A, Σ
R generate the correction signals:
which then are added to previous results of measurements from IAR registers producing:
The iterating-measuring process is continued according to the described algorithm (
Equations 15–
18). In general form, the iterating correction values of the
(n +
1)-th approximation are found as:
According to the convergence condition of the iterating correction algorithm, the increment of approximation numbers leads to the fact that
N(i)A, N(i)R approach to
N(0)A, N(0)R. At the step
I =
m when the conditions
and
are satisfied with an accuracy about the least significant digit of the compared codes the correction is finished and the values:
give the accurate results of the iterating impedance measurements. The
δ(m)A and
δ(m)R are the relative errors of the conversion at step
m. The accuracy limit of measurement depends on the precision of the compensation resistor, time instability of direct and feedback channels, and non-linearity of the DAC.
Table 2 shows the relative errors during the iterating correction process for measurements on a test signal frequency equal to 500 kHz.
Table 3 presents the results of experiments for the determination of necessary steps to achieve measurement errors of less than ±0.05% for a wide range of frequencies
The advantage of the proposed iterating method consists in the generation of correction actions in feedback channels in digital form. That results in a very small error equal to half of the least significant bit of the operating word of the DAC (±0.5/2
n where
n is the number of input bits of DAC). The iterating correction may be used for accurate measurements up to 500 kHz (
Table 3) due to the increment of required iterations as a result of the tight interaction of converter channels at high frequencies.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}