1. Introduction
As the largest metropolitan in China, Shanghai is directly close to the sea and Huangpu River. Built on coastal sand and clay that lie 70 meters below the ground surface, this city has been suffering from land subsidence for many years due to overuse of groundwater and rapid construction of skyscrapers [
1]. The historical record shows that the most severe subsidence occurred in the 1960s at a rate of over 10 cm/yr - a rate that would have put the city below sea level by 1999 if it had not been slowed down [
1-
2]. Since then the municipal government has taken some management actions such as pumping water back into ground to mitigate the situation. However, the uneven subsidence at a rate of 1 cm/yr in recent years has still affected or deteriorated facilities such as subway tunnels, buildings, roads, and water and sewage systems, thus resulting in huge economic loss [
2].
Monitoring of land subsidence in Shanghai is apparently crucial for predicting potential geological hazards and designing compensation strategies. Over the past decades, the subsidence data has been collected on a regular basis by the conventional methods such as precise leveling and GPS [
1-
2] which are time consuming, point-based and lack fine details. In recent years, we have focused on exploring a new technique called differential interferometric synthetic aperture radar (DInSAR) to provide another choice for efficiently detecting subsidence in Shanghai [
3-
4]. It is well known that DInSAR is viable for regional deformation mapping with some prominent advantages such as high sensitivity to motion and fine spatial resolution. Deformation extraction relies on comparison of phase values between SAR images acquired at different time over the same area [
5]. However, the full operational capability of DInSAR in deformation monitoring has not been achieved yet. The major sources of uncertainty in interferometric deformation measurements are temporal decorrelation and atmospheric influence [
5-
7].
To mitigate the aforementioned negative effects, Ferretti
et al. developed a very generic technique referred to as permanent-scatter (PS) technique to extract deformation information from the multiple interferograms generated with a time series of SAR images [
8]. Instead of full-resolution analysis, the PS technique performs modeling and analyzing on PS targets, i.e., hard objects such as buildings, rocks, bridges and dykes, which can maintain steady radar reflectivity even over months to years. On the basis of the basic strategy of PS technique proposed by Ferretti
et al. [
8-
9], this paper aims to improve both accuracy and reliability for subsidence detection in Shanghai by considering spatial autocorrelation and parameter adjustment. With the use of multiple interferograms, the analysis of subsiding process in Shanghai is performed on a strong network which is formed by connecting neighboring PS points. Such an approach is thereafter referred to as PS-networking SAR interferometry. Its algorithm validation is conducted using 26 C-band SAR images acquired by the satellites ERS-1 and ERS-2 of the European Space Agency (ESA) from 1992 to 2002 over Shanghai.
This paper is organized as follows. This part is followed by a brief description of data preprocessing and PS-network formation. After this, we present the methodologies of data modeling and parameter estimating. The testing results are then shown and discussed. Conclusions are given in the final section.
2. PS detection and PS-network formation
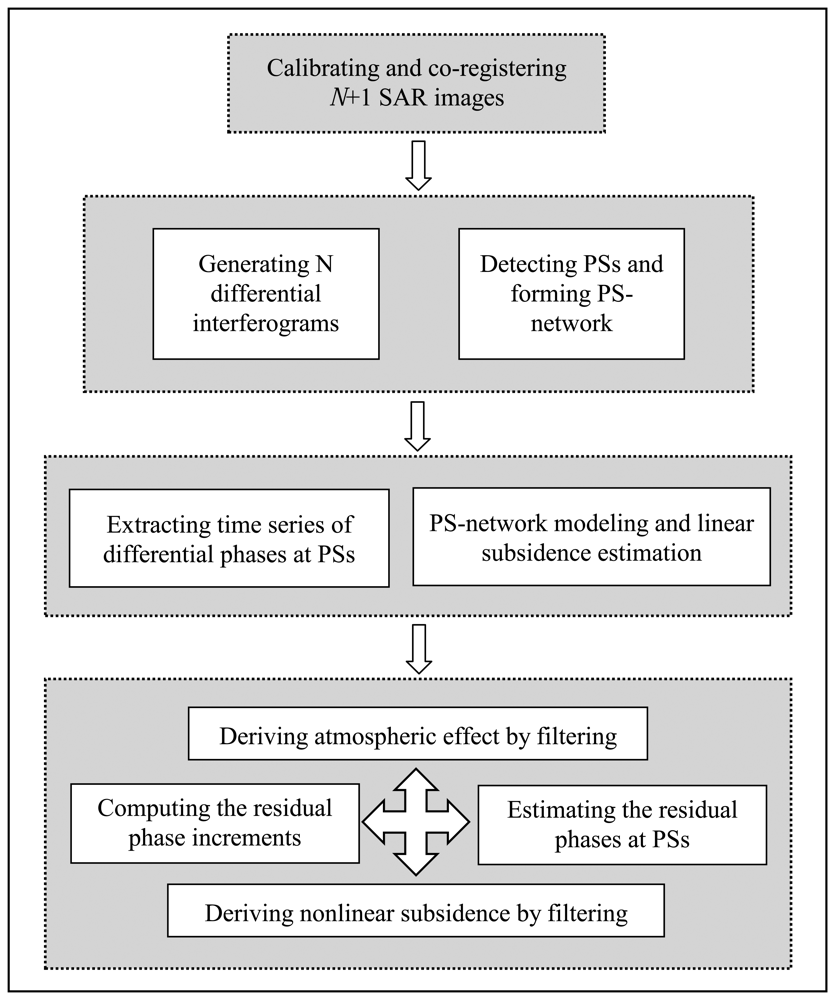
Unlike the conventional DInSAR only dealing with a single interferogram, the PS-networking SAR interferometry utilizes the multiple interferograms to isolate deformation information from atmospheric and topographic effects.
Figure 1 shows the main procedures of PS-networking SAR interferometry being used for estimating subsidence in Shanghai.
Given N+1 SAR images acquired at different time over the same area, they are first ranked by imaging date order. One of them is then selected as the unique master image, while the remaining N SAR images are used as the slave images, and thus resulting in N interferometric pairs and N interferograms.
To guarantee the quality of all the interferograms, we select the optimal master image by maximizing the joint correlation (JC) of all the images with [
10]
where the function
c is defined as
In
equation (1), γ
m denotes JC value when image
m is used as the master;
,
Tk, m and
are the spatial baseline (SB), the temporal baseline (TB) and the Doppler centroid difference (DCD) between image
k and
m, respectively; index
c means the coherence. In
equation (2) a denotes the critical value of SB, TB or DCD. We set the maximum SB, TB and DCD of all the interferograms as their respective critical values. Let every image be the master and
N+
1 JC values can be obtained with a trial computation by
equation (1). The image corresponding to the maximum JC value is chosen as the optimal master image.
Since the accurate co-registration of SAR imagery is a key prerequisite for any change detection, all the SAR images have to be co-registered into the same space with sub-pixel accuracy [
5].
N slave SAR images are co-registered on sampling grids of the selected master image by maximizing correlation of amplitude data between SAR acquisitions. As the subsequent PS detection is based on the statistical calculation of SAR data, we calibrate all the SAR amplitude images in a similar way as Lyons & Sandwell [
11]. The unique radiometric calibration factor of each image is defined and calculated as a ratio of the amplitude of each image (mean of all pixels) to the mean amplitude of the entire dataset. Each SAR amplitude image is divided by this ratio to make the brightness between images consistent and comparable.
In terms of PS detection, existing study shows that the statistical properties of phase data at any time-coherent pixel can be analyzed by the time series of SAR amplitude data [
9]. Although our PS detection basically follows the strategy proposed by Ferretti
et al. [
9], we identify the PS candidates on a pixel-by-pixel basis with use of all the co-registered and calibrated SAR amplitude images. First derived are the overall mean
Ᾱ and the standard deviation (SD) σ
A of the entire amplitude dataset. At each pixel the time series of the amplitude values is extracted to calculate the mean ā and the SD σ
a. We label a pixel as a PS candidate if the following two criteria are satisfied simultaneously,
where
Da is called amplitude dispersion index (ADI) [
9]. By the second criteria, the false PSs are more easily removed as the lower amplitude means less temporally coherent. We will eventually judge if the PS candidates are true or false by PS networking based on phase data as discussed in the next section.
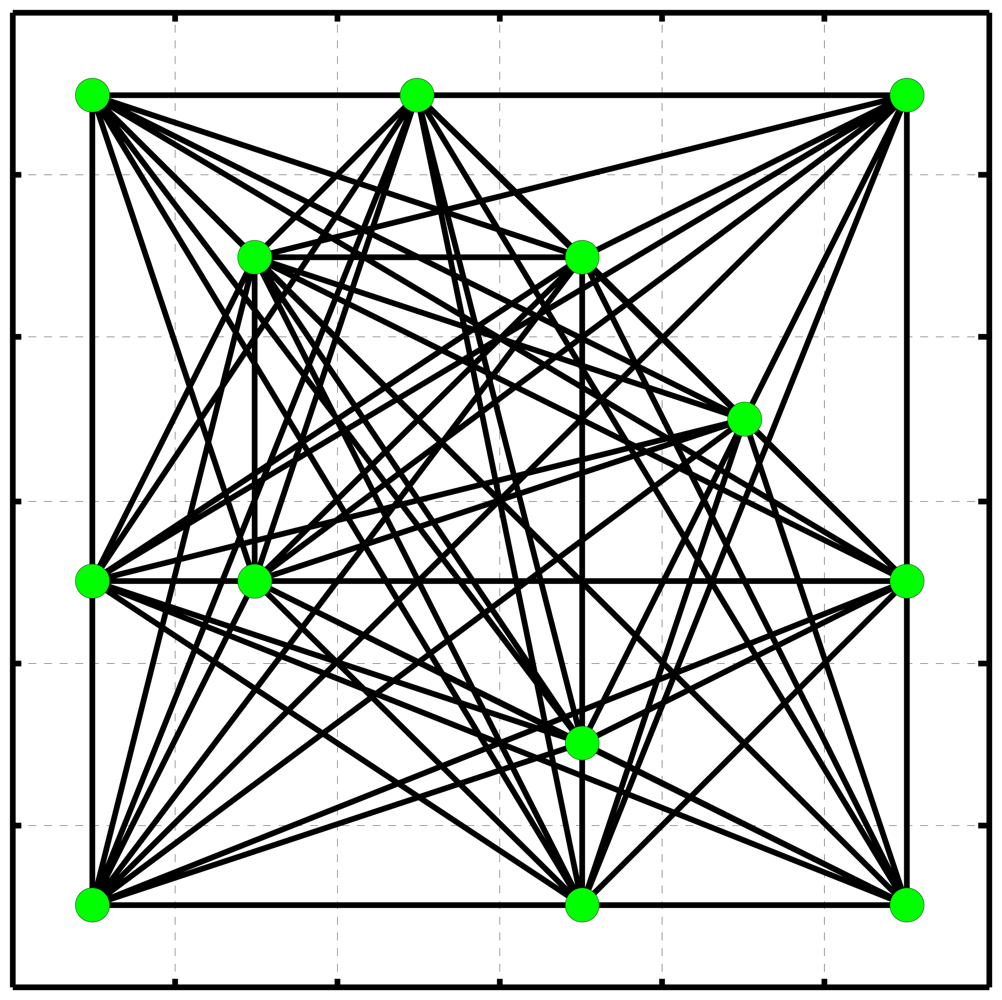
After selection of all the PSs, we connect the neighboring PSs to form a network which is similar to a conventional geodetic network like leveling or GPS network. It will be seen that such network can provide a framework for modeling and improving parameter estimation and adjustment. Unlike a triangular irregular network (TIN) as applied by Kampes & Adam [
10] and Mora
et al. [
12], we freely link the neighborhood PSs using a given threshold of Euclidian distance. Any two PSs
l and
p will be connected only if the following criterion is met,
where (
x,
y) are the pixel coordinates within the image space;
fr and
fa are the scaling factors (converting pixel dimension into geometric distances) in range and azimuth direction, respectively;
S0 is the distance threshold (e.g. 1 km) used to form a PS-PS connection which is thereafter called an arc.
It should be pointed out that 0
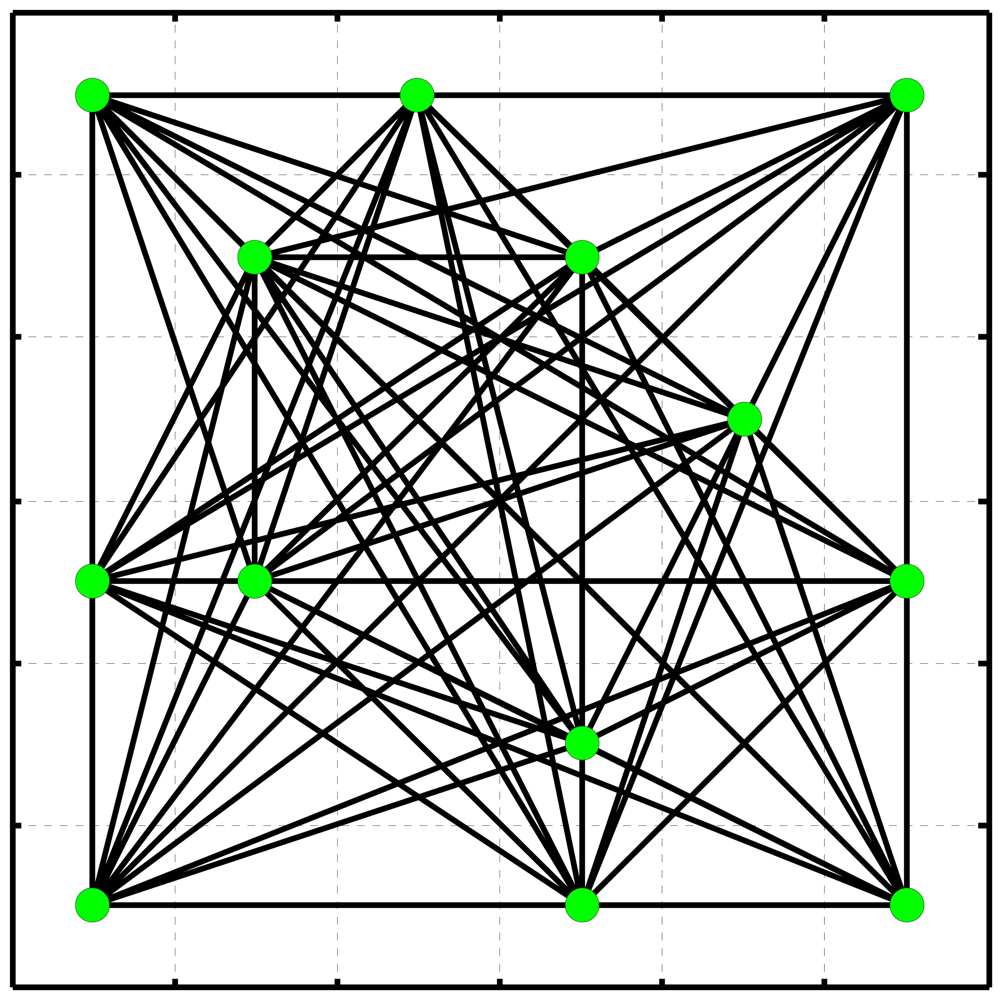
S is generally chosen by mainly considering the atmospheric gradients on the space domain. The faster the spatial variation of atmospheric delay, the shorter the distance threshold. As an example,
Figure 2 shows a network, herein termed freely-connected network (FCN), constructed using inequality (4) with several PSs. It should be pointed out that such FCN is much stronger than the TIN in terms of parameter estimation as presented in the next section.
4. Dataset and subsidence result in Shanghai
To detect subsidence evolution in Shanghai metropolitan (China) by the procedures presented above, we utilize 26 single look complex (SLC) SAR images which are available at hand. They were acquired from 1992 to 2002 by two C-band (wavelength λ = 5.6 cm) radar sensors onboard the satellites ERS-1 and ERS-2, respectively (both operated by European Space Agency). All the images were collected by a nominal radar look angle of about 23° along the descending orbits. With a pixel size of 7.9 m in slant range by 4.0 m in azimuth, each image covers the same area of about 100×100 km whose central location is 121°28′E, 31°10TN. To optimize the interferometric combination, we determined the unique master image by maximizing radar coherence of the entire dataset by
equation (1). Eventually the SAR image taken by ERS-2 on May 5, 1998 is chosen as the optimal master image. The remaining 25 images are used as the slave images, thus forming 25 interferometric pairs.
Table 1 lists the parameters of all the images, including spatial and temporal baseline with respect to the master image. For detection of PSs, all the 26 amplitude images were calibrated by the procedures as briefed in section 2.
To generate interferograms, all the slave images were co-registered onto the sampling grids of the master image.
Existing studies indicate that the most serious subsidence in Shanghai has been taking place around the downtown area, and reached a remarkable value of 2.63 m accumulated from 1921 to 1965 [
1-
2]. The further data reduction is therefore focused on the main downtown area of 7 km by 12 km.
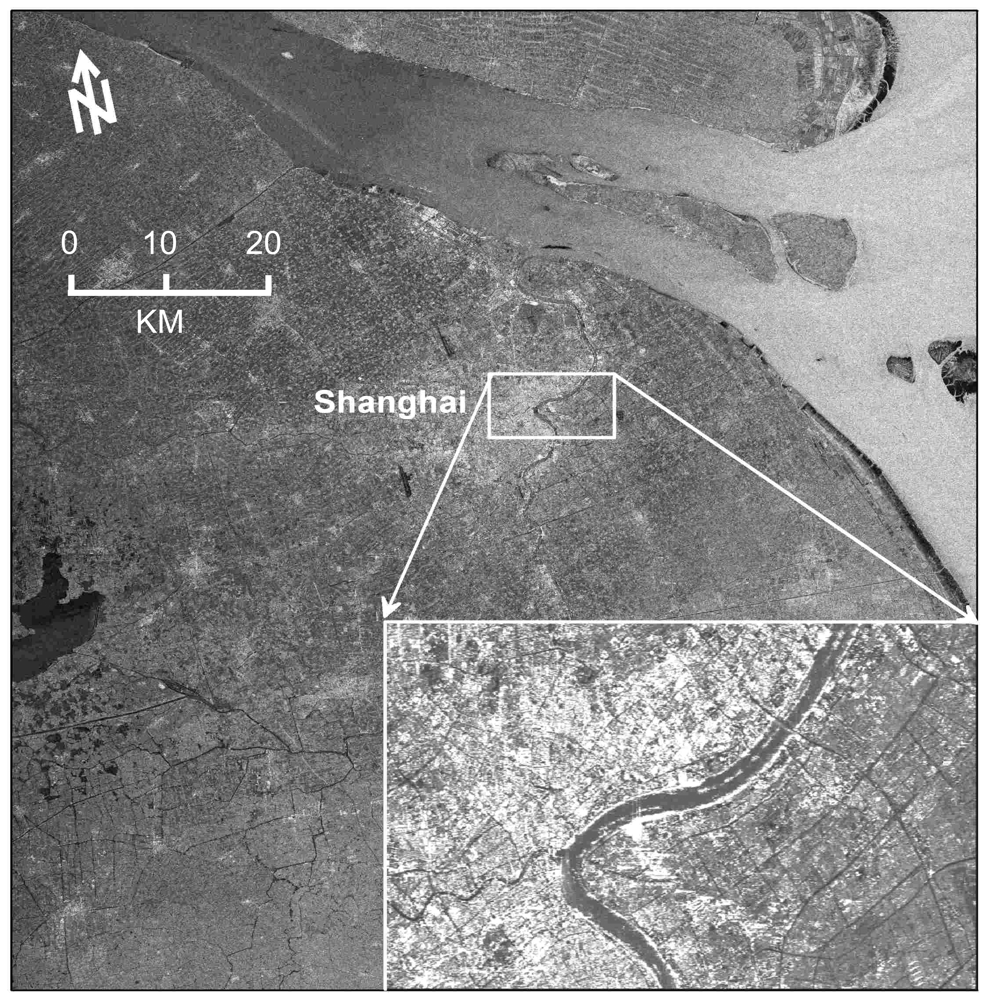
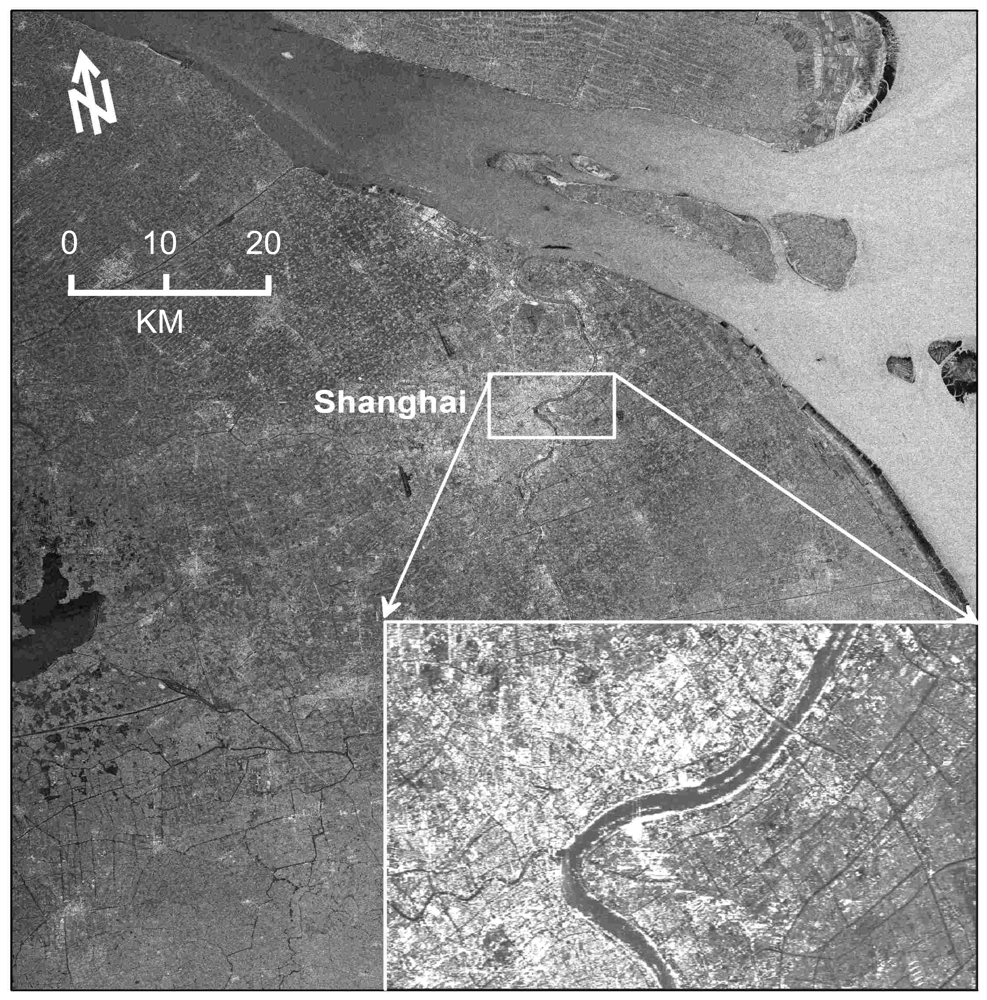
Figure 3 displays the study area of interest (AOI) marked by a box onto the master amplitude image, where the inset shows the enlarged multi-image reflectivity map derived by averaging all the image patches of the AOI. Its radiometric quality has been dramatically improved due to the reduction of speckle noises by averaging. It is clearly visible that Huangpu River wriggles over the study area. The 25 differential interferograms were generated by the “two-pass” method [
4-
5]. To remove both flat-earth and topographic phases, we use the precise orbit state vectors (about 4-cm accuracy in the radial direction) provided by Delft Institute for Earth-Oriented Space Research in Netherlands [
8-
10] and a DEM (about 5-m accuracy) which were generated using 1:50000 digital maps provided by State Bureau of Surveying and Mapping, the national mapping agency of China.
The PS candidates were detected on a pixel-by-pixel basis by the statistical computation of time series of amplitude values at each pixel. The pixel is determined as a PS candidate based on the criteria of inequality (3).
Figure 4 shows the distribution of all the 1520 PSs obtained in this way, which are superimposed onto an optical orthoimage created with data from IKONOS sensor. In
Figure 4, five PSs marked by pentagram and PS1, PS2, …, PS5, respectively, will be used for later analysis of time series of subsidence (see
Figure 7). It can be noted that the high density of PSs (about 35/km
2) appears in the area with dense buildings, while the PSs are rare in some farmlands due to serious temporal decorrelation. We formed a very strong network by freely connecting each PS and all the others if their distance is less than 1 km, as defined in inequality (4), resulting in 4202 arcs.
The increments of both linear subsidence velocities and elevation errors between two adjacent PSs of each arc were then estimated by maximizing MC with
equation (8). As discussed early, we used a MC threshold of 0.45 to reject low-quality arcs and “bad” PS candidates. 1502 PSs and 4092 arcs thus remained as the valid input of the subsequent LS network adjustment in which PS1 was selected as a reference point for LS solution [
3-
4]. The linear subsidence rates and elevation errors at 1502 true PSs were derived.
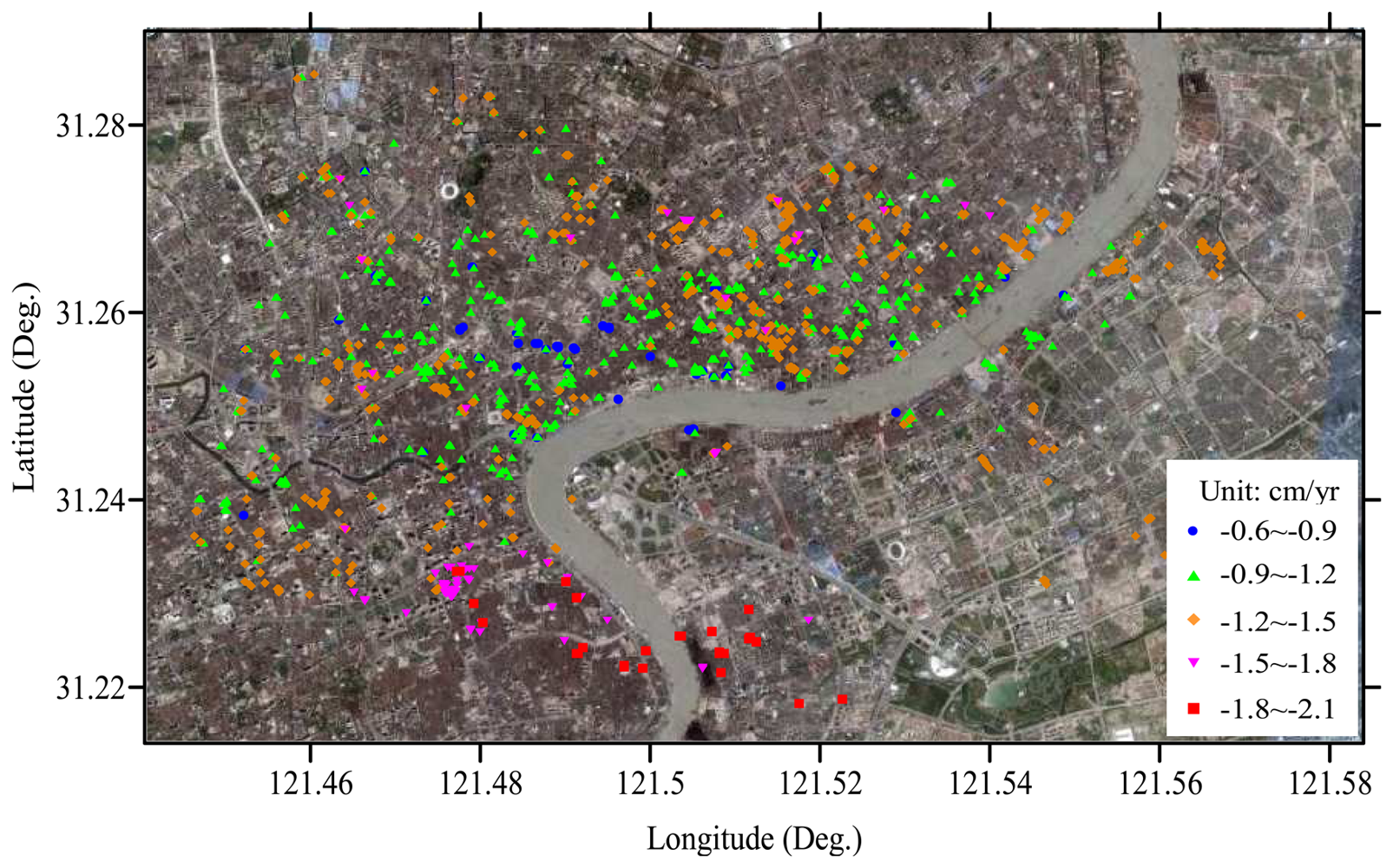
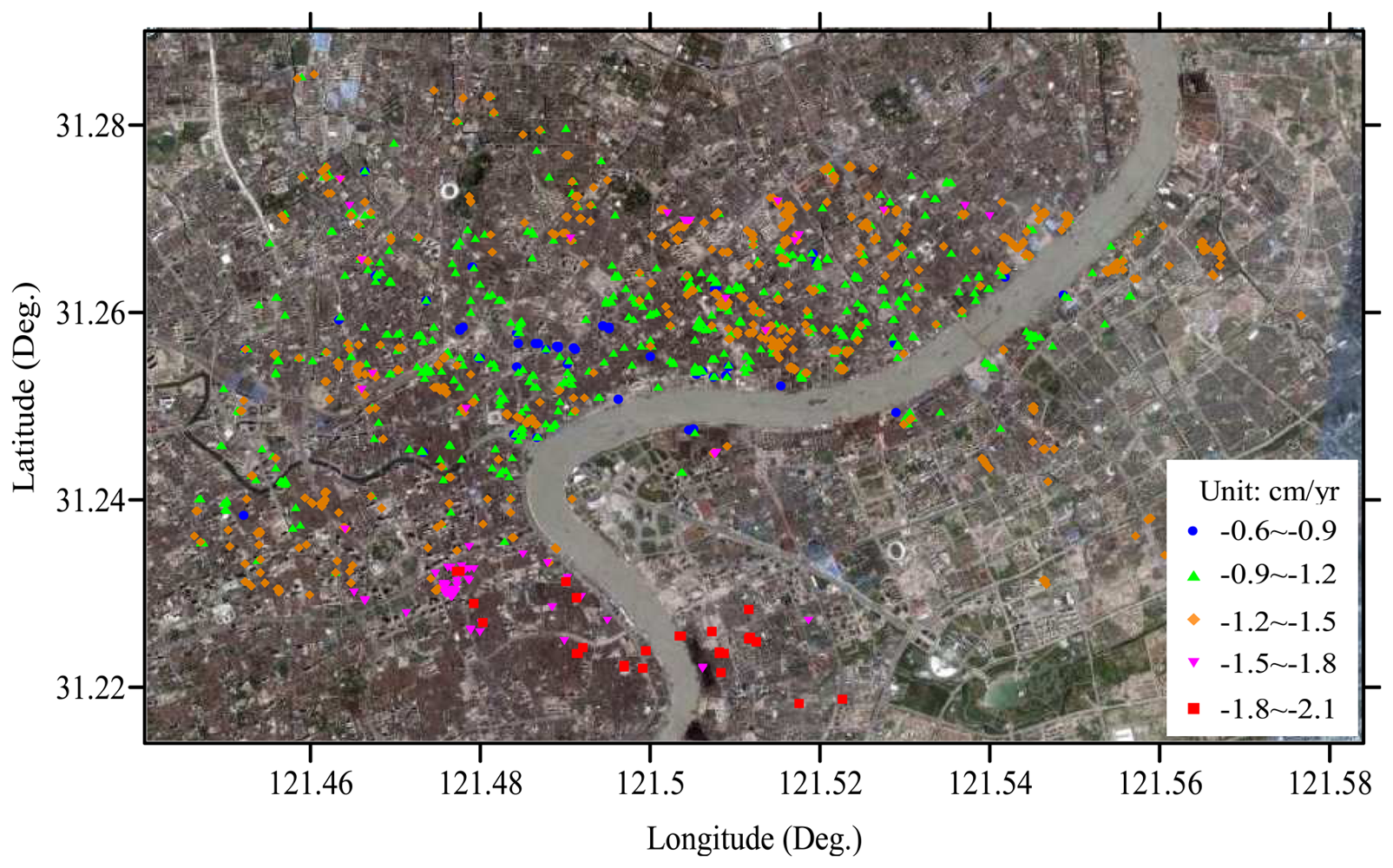
Figure 5 shows the classed map of linear subsidence rates (in cm/yr) at all the true PSs. The subsidence rates from 1992 to 2002 in the study area range from -2.1 to -0.6 cm/yr, and the averaged subsidence rate reaches -1.1 cm/yr.
It should be pointed out that the FCN used in our approach is more advantageous than TIN used elsewhere in terms of accuracy and reliability for estimating subsidence rates and elevation errors at PSs, although the former incurs much heavier computation burden than the latter. The reliability with FCN is significantly enhanced because it has much more connections (arcs) between adjacent PSs than TIN. In other words, the total number of redundant observations in FCN is much larger than that in TIN. Hence the LS estimator for FCN is less disturbed by outliers. Our testing results derived with simulated data indicated that the FCN-based LS estimation can efficiently resist against a small portion of outliers in measurements (Δε, Δv). In addition, the FCN tends to remain more PS points than TIN when deleting some “bad” arcs by MC thresholding. The weaker links in TIN may cause more isolated PSs which can not be connected with other PSs, and some true PSs are erroneously rejected. The stronger links in FCN are therefore useful for recovering the finer details of deformation field.
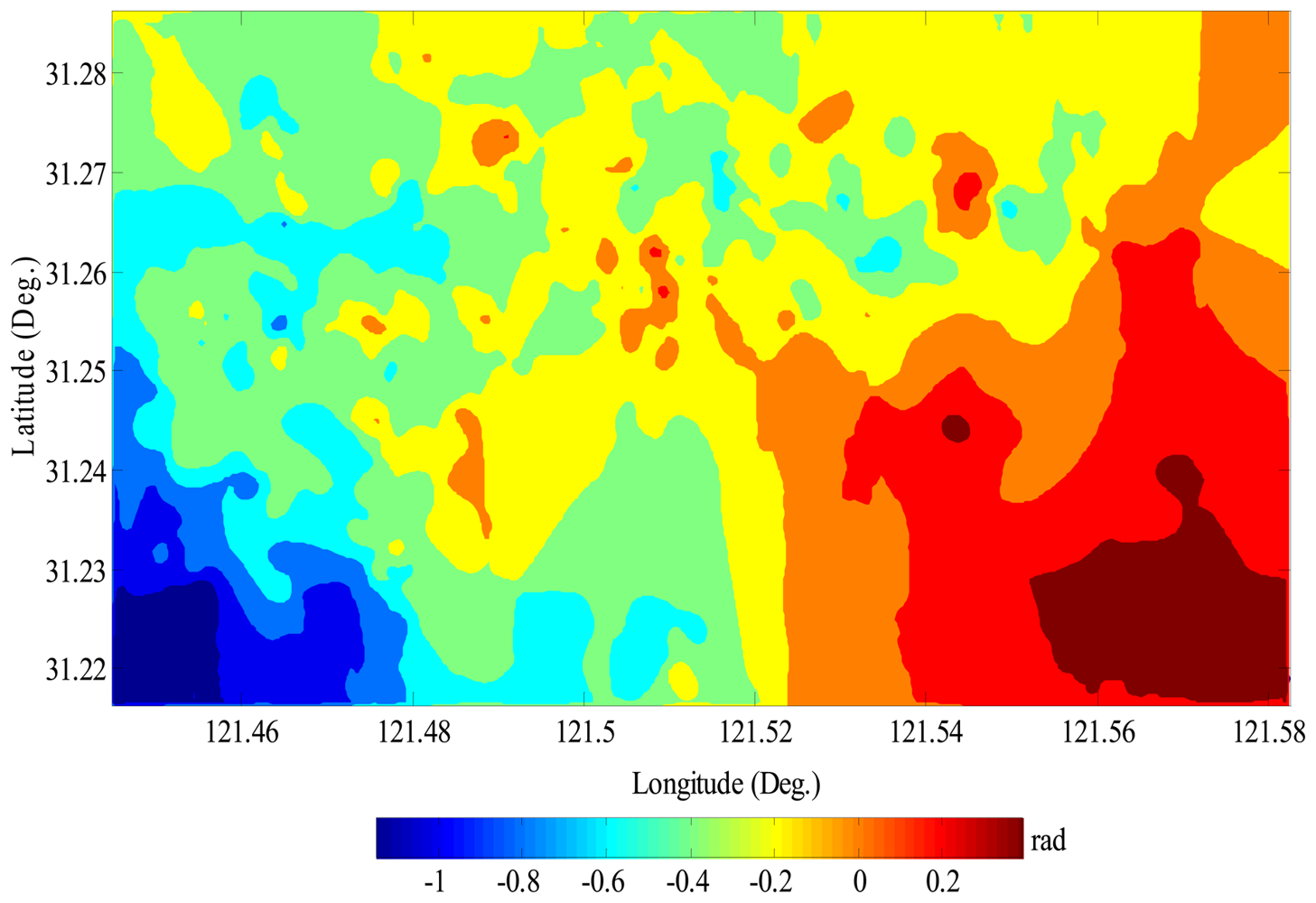
The atmospheric delay and nonlinear subsidence in the study area were finally separated by a time-space filtering method as discussed in section 3.3. Prior to such separation, the residual phases in each differential interferogram were extracted by detrending both linear subsidence and topographic effect. The atmospheric phases of the master image (by ERS-2 on May 5, 1998) were derived by a LP space filtering applied onto the mean of 25 residual-phase images (see
equation (15)), while the atmospheric phases of any slave image were estimated by time-space filtering according to
equation (16). As an example,
Figure 6 shows the atmospheric phases in the partial AOI for the master image, which vary from -1.2 to 0.4 radians, i.e., range change of -5 to 2 mm in radar line of sight. As a remark, we stress that exactly separating nonlinear subsidence from atmospheric artifacts is indeed a challenging task. The further improvement on this point is still required, particularly by integrating
a priori information on atmosphere and subsidence available from some other monitoring approaches such as GPS permanent tracking network.
After deriving atmospheric phases,
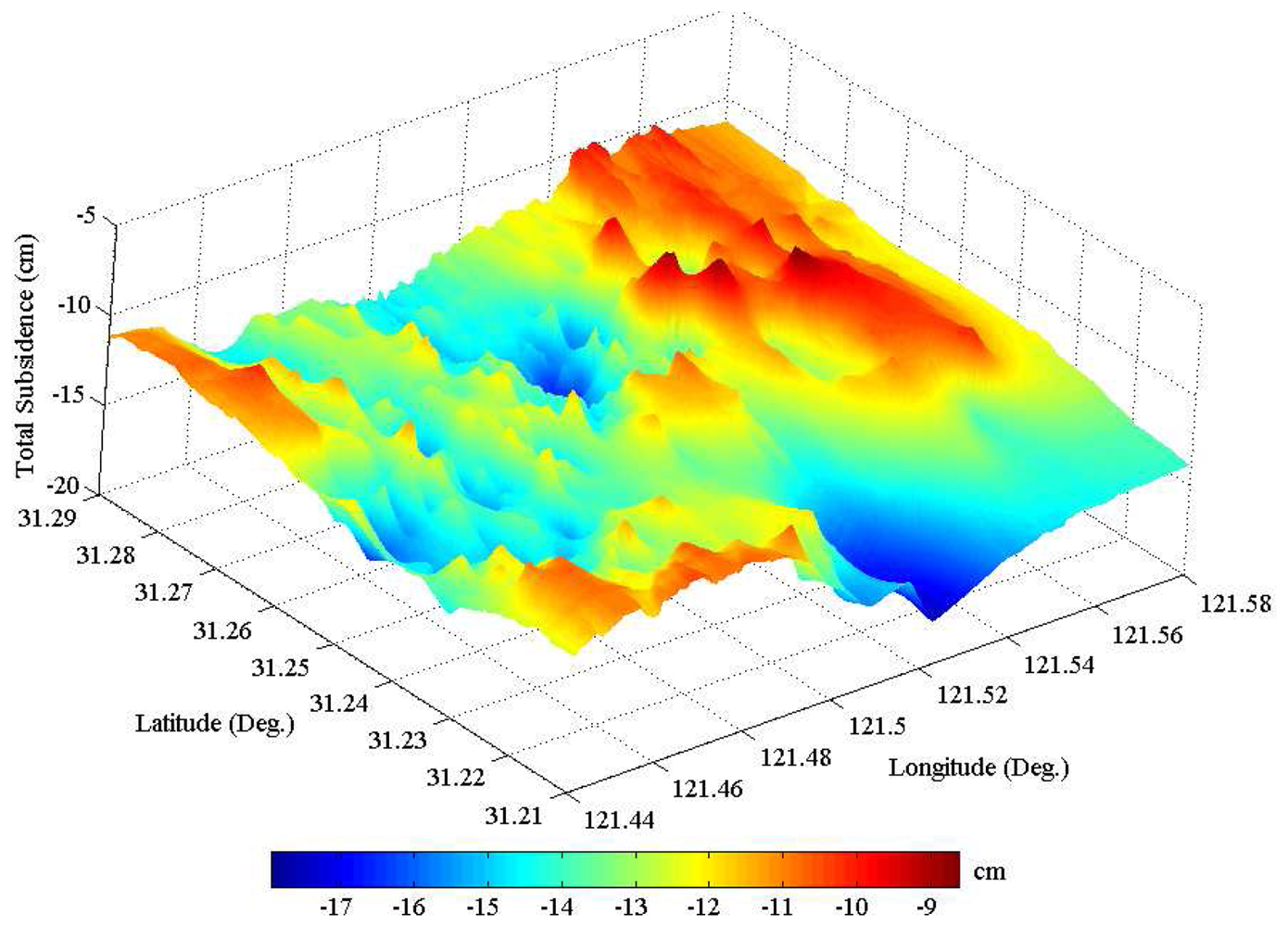
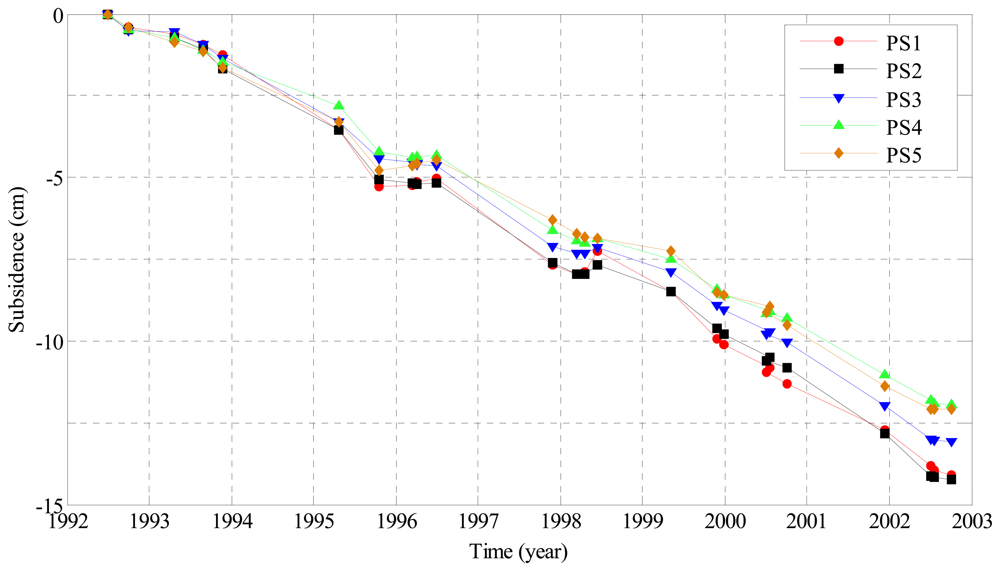
equation (17) was used to calculate nonlinear subsidence. The time series of subsidence was eventually obtained as a sum of linear and nonlinear parts. As examples,
Figure 7 shows the so-obtained temporal evolution of subsidence at 5 PSs (see
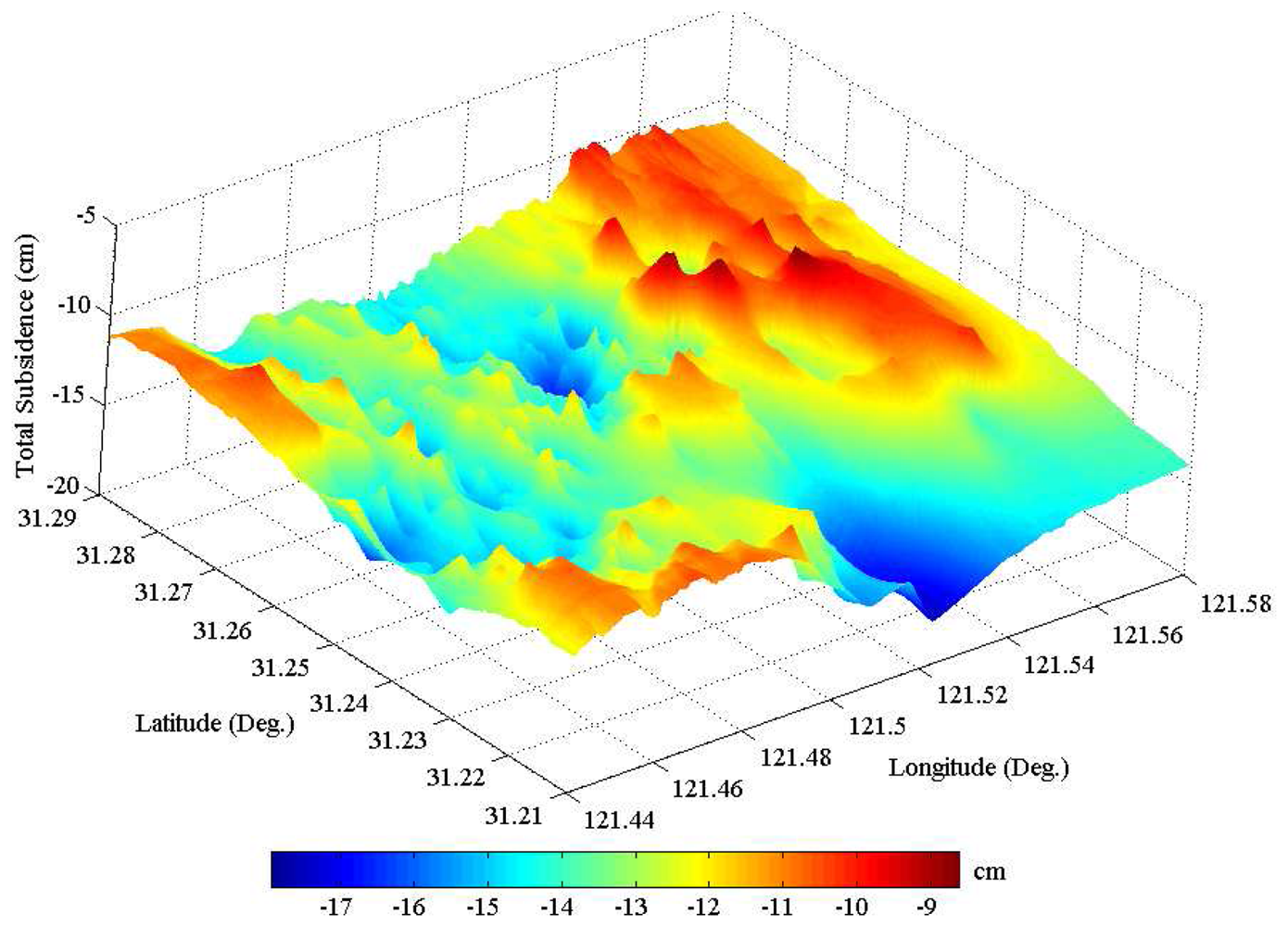
Figure 4) in the central part of the study area, where about 15-cm land sinking was accumulated from 1992 to 2002. It is obvious that the linear subsidence trend dominates the nonlinear component with a peak-to-trough variation of about 4 cm in this study area. For visualization, a perspective view of the entire subsidence field is shown in
Figure 8, where the remarkable sinking parts can be better appreciated. Maximum and minimum subsidence values are -18 and -9 cm, respectively.
In recent years, both precise leveling and GPS survey have been carried out to monitor subsidence in Shanghai by some authorities [
1-
2]. Both the first- and second-order leveling are carried out once per year for benchmarks in the downtown area. The annual subsidence rates (see
Figure 5) and the accumulated quantity (see
Figure 8) estimated with PS-networking SAR interferometry are in good agreement with the leveling subsidence results reported in some open literature [
1-
2]. This indicates that our approach presented in this study is effective for detecting land subsidence in Shanghai. The current land sinking is highly related to the large-scale urban construction and the overuse of groundwater. Especially from 1992 to 1995, the skyscrapers' constructions are most remarkable [
1]. It should be noted that the estimated vertical displacement may also contain the settlement of skyscrapers, and not purely the natural subsidence of the land surface. The annual subsidence rate is however much smaller than that occurring in the 1980's. This is primarily attributed to some mitigation strategies proposed by city managers and planners, which include reducing groundwater withdrawal, increasing river water use, pumping water back into depleted aquifers, and utilizing light materials for construction.
5. Conclusions
To mitigate the negative impacts of both temporal decorrelation and atmospheric delay on mapping deformation with conventional DInSAR, this paper has presented an approach called PS-networking SAR interferometry for detection of land subsidence in Shanghai, China. With use of 26 ERS-1/2 SAR images acquired 1992 through 2002 over Shanghai, the time series of land subsidence is analyzed with a very strong network which is formed by freely connecting neighboring PSs according to a given distance threshold. The mathematical models and computing methods are addressed systematically by considering spatial autocorrelation and LS parameter estimation. The linear and nonlinear subsidence, atmospheric effect as well as topographic error were separated effectively in this way. The subsidence velocity field in 10 years over Shanghai was also derived. It was found that the annual subsidence rates in the study area range from -2.1 to -0.6 cm/yr, and the averaged subsidence rate reaches -1.1 cm/yr. The maximum subsidence accumulated in 10 years is up to -18 cm. These are generally in good agreement with the leveling subsidence results reported elsewhere. In addition, the testing results indicated that the FCN proposed in this study is more advantageous than the TIN used elsewhere in terms of reliability for estimating subsidence rates and elevation errors at PSs, although the former incurs much heavier computation burden than the latter.
With further improvement, it is anticipated that PS-networking SAR interferometry would become an operational tool to monitor the slowly-accumulated urban subsidence, and thus complementing the conventional geodetic tools such as GPS and leveling. In China, there are a number of cities which are suffering from land subsidence. Besides Shanghai, the other typical sinking cities include Tianjin and Taiyuan. The reliable and prompt measurements reflecting land subsidence evolution are valuable for assessing and mitigating some geological hazards related to land sinking.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}