Oil Spill Detection by SAR Images: Dark Formation Detection, Feature Extraction and Classification Algorithms

Abstract
:
1. Introduction
2. SAR remote sensing sensors for oil spill detection
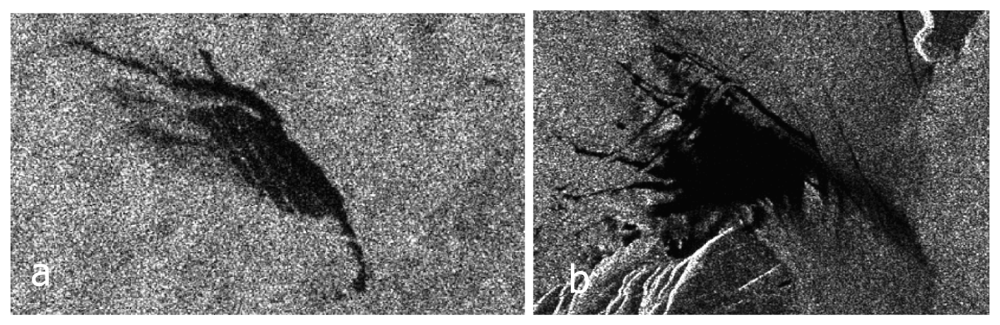
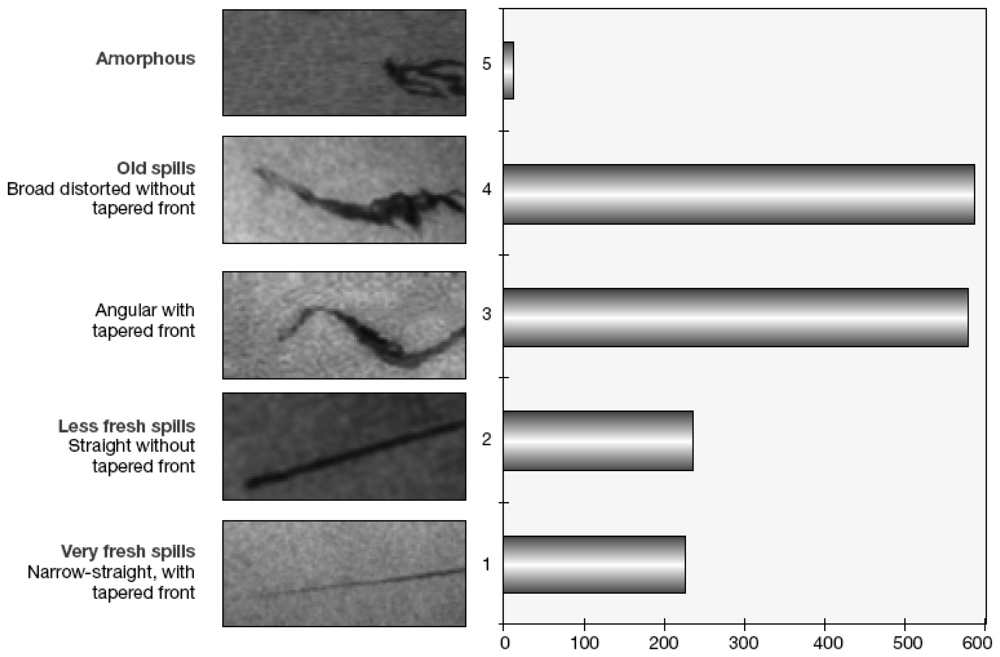
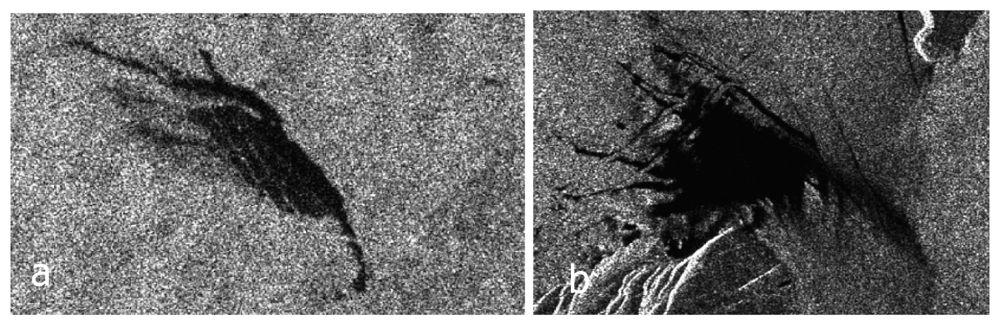
3. SAR imaging of oil spills
4. Methodologies for oil spill detection on SAR images
4.1. Manual inspection
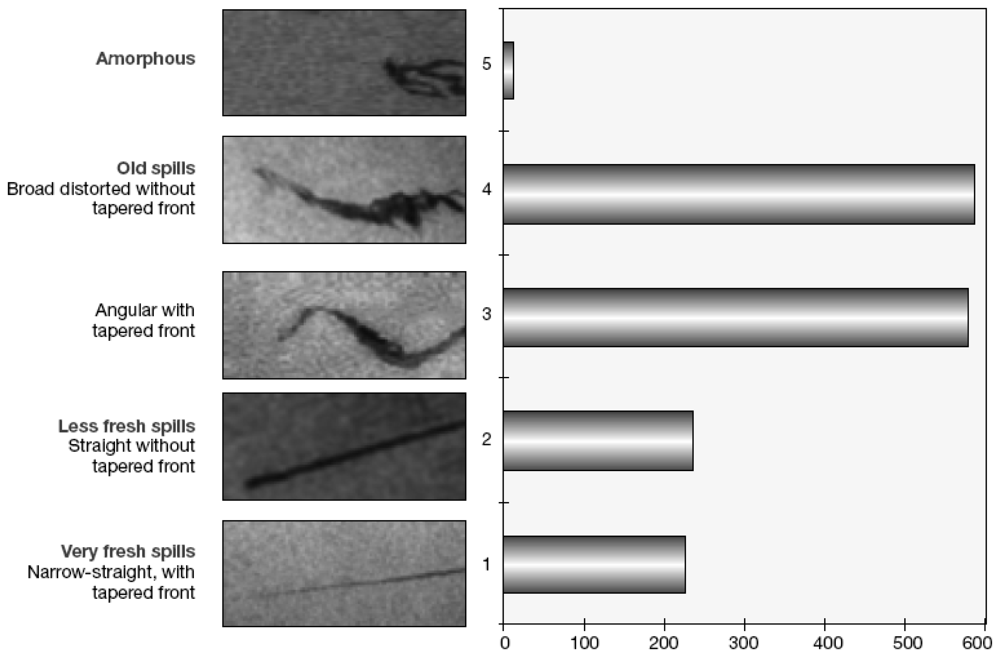
- Dark homogeneous spots in a uniform windy area;
- Linear dark areas, not extremely large, with abrupt turns i.e. most likely abrupt turns due to wind directions change or surface current. Natural slicks in these conditions tend to disappear. Man made slicks have higher viscosity and tend to change their shape.
- Low wind areas;
- Coastal zones due to wind sheltering;
- Elongated dark areas with smooth turnings in spiral shape.
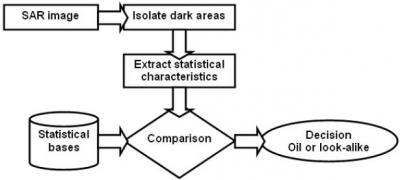
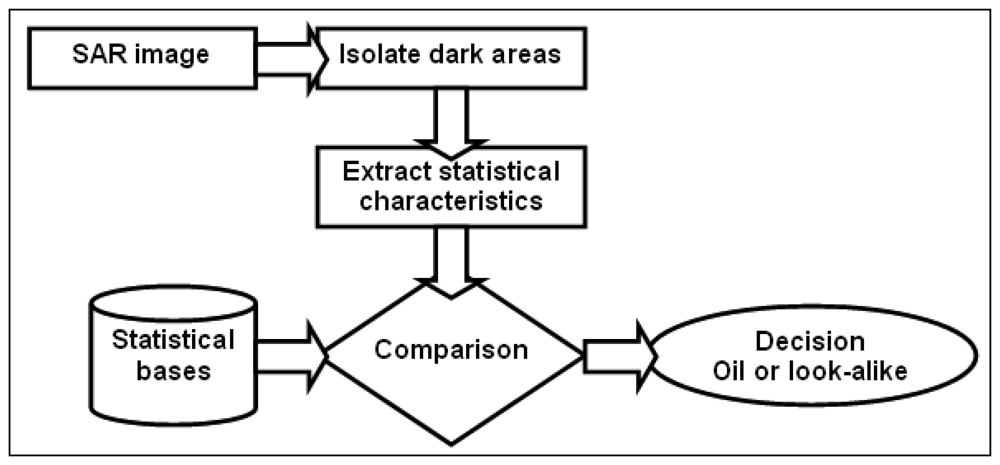
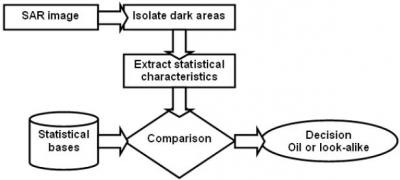
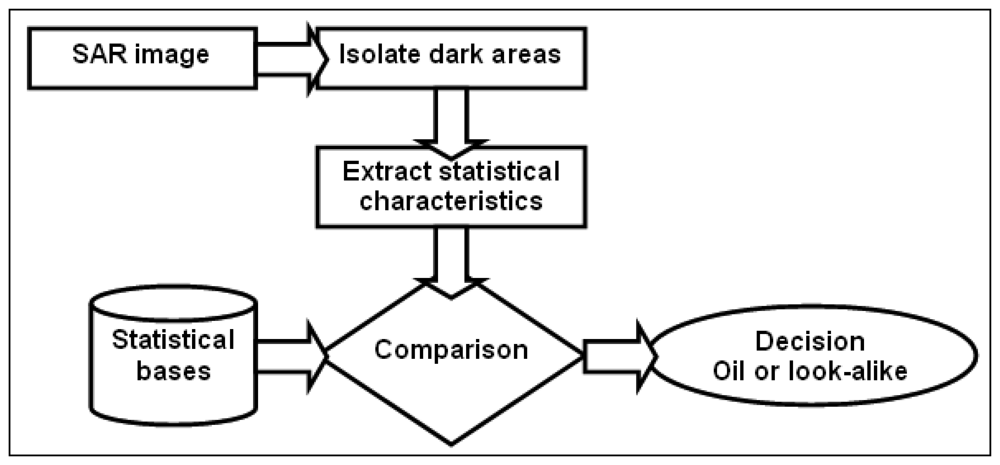
4.2. Semiautomatic and fully automatic methodologies
- Detection and isolation of all dark formations presented in the image. Mainly this step is a result of thresholding and segmentation processing.
- Extraction of statistical parameters of the dark formations, so called “features” for each oil spill candidate. These features are related with the geometry of the formation (e.g. area, perimeter) their physical behavior (e.g. mean backscatter value) and their context in the image (e.g. distance to ships).
- Test of the extracted values against predefined values, which characterize man-made oil spills and look-alike phenomena. These values are usually determined through phenomenological considerations and statistical assessments.
- Classification of the dark formations to oil spills or look-alikes. Several classifiers have been used, i.e. statistical approach through computation of probabilities, neural networks, fuzzy logic, etc.
4.2.1. Dark formation detection
4.2.2. Feature extraction
4.2.3. Classifiers
5. Discussion and conclusions
References
- Solberg, A.; Storvik, G.; Solberg, R.; Volden, E. Automatic Detection of Oil Spills in ERS SAR Images. IEEE Trans. Geosci. Remote Sens. 1999, 37, 1916–1924. [Google Scholar]
- Del Frate, F.; Petrocchi, A.; Lichtenegger, J.; Calabresi, G. Neural networks for oil spill detection using ERS-SAR data. IEEE Trans. Geosci. Remote Sens. 2000, 5, 2282–2287. [Google Scholar]
- Espedal, H.A.; Wahl, T. Satellite SAR oil spill detection using wind history information. Int. J. Remote Sens. 1999, 20, 49–65. [Google Scholar]
- Espedal, H.A.; Johannessen, J.A. Detection of oil spills near offshore installations using synthetic aperture radar (SAR). Int. J. Remote Sens. 2000, 11, 2141–2144. [Google Scholar]
- Fiscella, B.; Giancaspro, A.; Nirchio, F.; Trivero, P. Oil spill detection using marine SAR images. Int. J. Remote Sens. 2000, 21, 3561–3566. [Google Scholar]
- Pavlakis, P.; Tarchi, D.; Sieber, A. On the Monitoring of Illicit Vessel Discharges, A reconnaissance study in the Mediterranean Sea; European Commission Report EUR 19906 EN; 2001. [Google Scholar]
- De Souza, D.; Neto, A.; Da Mata, W. Intelligent System for Feature Extraction of Oil Slicks in SAR Images: Speckle Filter Analysis. In Lecture Notes in Computer Science, 13th International Conference, ICONIP 2006, Hong Kong, China, October 3-6, 2006; Vol. 4233.
- Keramitsoglou, I.; Cartalis, C.; Kiranoudis, C. Automatic identification of oil spills on satellite images. Environ. Model. Softw. 2006, 21, 640–652. [Google Scholar]
- Karathanassi, V.; Topouzelis, K.; Pavlakis, P.; Rokos, D. An object-oriented methodology to detect oil spills. Int. J. Remote Sens. 2006, 27, 5235–5251. [Google Scholar]
- Mercier, G.; Girard-Ardhuin, F. Partially supervised oil-slick detection by SAR imagery using kernel expansion. IEEE Trans. Geosci. Remote Sens. 2006, 44, 2839–2846. [Google Scholar]
- Ramalho, G.L.B.; Medeiros, F.N.S. Using Boosting to Improve Oil Spill Detection in SAR Images. 18th International Conference on Pattern Recognition (ICPR), Hong Kong, China; 2006; 2, pp. 1066–1069. [Google Scholar]
- Topouzelis, K.; Karathanassi, V.; Pavlakis, P.; Rokos, D. Detection and discrimination between oil spills and look-alike phenomena through neural networks. ISPRS J. Photogramm. Remote Sens. 2007, 62, 264–270. [Google Scholar]
- Solberg, A.; Brekke, C. Oil spill detection in Northern European Waters: Approaches and Algorithms. In Remote Sensing of the European Seas; Barale, V., Gade, M., Eds.; Springer: Dordrecht, The Netherlands, 2008; pp. 359–370. [Google Scholar]
- Serra-Sogas, N.; O'Hara, P.D.; Canessa, R.; Keller, P.; Pelot, R. Visualization of spatial patterns and temporal trends for aerial surveillance of illegal oil discharges in western Canadian marine waters. Mar. Pollut. Bull. 2008, 56, 825–833. [Google Scholar]
- Brekke, C.; Solberg, H.A. Oil spill detection by satellite remote sensing. Remote Sens. Environ. 2005, 95, 1–13. [Google Scholar]
- Stathakis, D.; Topouzelis, K.; Karathanassi, V. Large-scale feature selection using evolved neural networks. Proceedings of SPIE, Image and Signal Processing for Remote Sensing XII; Bruzzone, Lorenzo, Ed.; SPIE Bellingham Wash. ETATS-UNIS (2006): Stockholm, Sweden, 13-14 September 2006; p. 6365. [Google Scholar]
- Pavlakis, P. Investigation of the Potential of ERS-1/2 SAR images for monitoring Oil Spills on the Sea Surface.; Joint Research Centre; European Commission Report EUR 16351 EN; 1996. [Google Scholar]
- Gade, M.; Alpers, W. Using ERS-2 SAR images for routine observation of marine pollution in European coastal waters. Sci. Total Envir. 1999. [Google Scholar]
- Bernardini, A.; Ferraro, G.; Meyer-Roux, S.; Sieber, A.; Tarchi, D. Atlante dell’inquinamento da idrocarburi nel Mare Adriatico.; European Commission Report EUR 21767 IT; 2005. [Google Scholar]
- Ferraro, G.; Bernardini, A.; Meyer-Roux, S.; Tarchi, D. Satellite Monitoring of Illicit Discharges from Vessels in the French Environmental Protection Zone (ZPE) 1999-2004.; European Commission Report EUR 22158 EN; 2006. [Google Scholar]
- Ferraro, G.; Bernardini, A.; David, M.; Meyer-Roux, S.; Muellenhoff, O.; Perkovic, M.; Tarchi, D.; Topouzelis, K. Towards an Operational Use of Space Imagery for Oil Pollution Monitoring in the Mediterranean Basin: a Demonstration in the Adriatic Sea. Mar. Pollut. Bull. 2007, 54, 403–422. [Google Scholar]
- Tarchi, D.; Bernardini, A.; Ferraro, G.; Meyer-Roux, S.; Muellenhoff, O.; Topouzelis, K. Satellite Monitoring of Illicit Discharges from Vessels in the Seas around Italy 1999-2004.; European Commission Report EUR 22190 EN; 2006. [Google Scholar]
- Topouzelis, K.; Bernardini, A.; Ferraro, G.; Meyer- Roux, S.; Tarchi, D. Satellite mapping of oil spills in the Mediterranean Sea. Fresen. Environ. Bull. 2006, 15, 10091–100914. [Google Scholar]
- Alpers, W.; Wismann, V.; Theis, R.; Huhnerfuss, H.; Bartsch, N.; Moreira, J.; Lyden, J. The damping of ocean surface waves by monomolecular sea slicks measured by airborne multi- frequency radars during the saxon-fpn experiment. Proc. International Geoscience and Remote Sensing Symposium (IGARSS91), Helsinki, Finland; 1991; pp. 1987–1990. [Google Scholar]
- Hovland, H.A.; Johannessen, J.A.; Digranes, G. Slick detection in SAR images. Proc. International Geoscience and Remote Sensing Symposium (IGARSS 94), Pasadena, CA, USA; 1994; pp. 2038–2040. [Google Scholar]
- Kubat, M.; Holte, R.C.; Matwin, S. Machine Learning for the Detection of Oil Spills in Satellite Radar Images. Mach. Learn. 1998, (2-3), 195–215. [Google Scholar]
- Benelli, G.; Garzelli, A. Oil-Spills Detection in SAR Images by Fractal Dimension Estimation. International Geoscience and Remote Sensing Symposium (IGARSS'99), Hamburg, Germany, June 28-July 2, 1999; 1, pp. 218–220.
- Nirchio, F.; Sorgente, M.; Giancaspro, A.; Biamino, W.; Parisato, E.; Ravera, R.; Trivero, P. Automatic detection of oil spills from SAR images. Int. J. Remote Sens. 2005, 26(6), 1157–1174. [Google Scholar]
- Solberg, A.; Brekke, C.; Husoy, P.O. Oil spill detection in Radarsat and Envisat SAR images. IEEE Trans. Geosci. Remote Sens. 2007, 45, 746–755. [Google Scholar]
- Kanaa, T.F.N.; Tonye, E.; Mercier, G.; Onana, V.P.; Ngono, J.M.; Frison, P.L.; Rudant, J.P.; Garello, R. Geoscience and Remote Sensing Symposium. IGARSS'03 2003, 4(21), 2750–2752. [Google Scholar]
- Canny, J. A computational approach to edge detection. IEEE Trans. Patt. Anal. Mach. Intell. 1986, 8, 679–698. [Google Scholar]
- Huang, B.; Li, H.; Huang, X. A level set method for oil slick segmentation in SAR images. Int. J. Remote Sens. 2005, 26, 1145–1156. [Google Scholar]
- Liu, A.K.; Peng, C.Y.; Chang, S.Y.-S. Wavelet analysis of satellite images for costal watch. IEEE J. Ocean Eng. 1997, 22, 9–17. [Google Scholar]
- Wu, S.Y.; Liu, A.K. Towards an automated ocean feature detection, extraction and classification scheme for SAR imagery. Int. J. Remote Sens. 2003, 24, 935–951. [Google Scholar]
- Araujo, R.; De Medeiros, F.; Costa, R.; Marques, R.; Moreira, R.; Silva, J. Locating oil spill in SAR images using wavelets and region growing. Lect. Note Comput. Sci. 2004, 3029, 1184–1193. [Google Scholar]
- Derrode, S.; Mercier, G. Unsupervised multiscale oil slick segmentation from SAR images using a vector HMC model. Pattern Recogn. 2007, 40, 1135–1147. [Google Scholar]
- Marghany, M.; Hashim, M.; Cracknell, A. P. Fractal Dimension Algorithm for Detecting Oil Spills Using RADARSAT-1 SAR; Gervasi, O., Gavrilova, M., Eds.; Springer-Verlag: Berlin / Heidelberg, 2007; Volume 4705, pp. 1054–1062. [Google Scholar]
- Marghany, M. RADARSAT Automatic Algorithms for Detecting Coastal Oil Spill Pollution. Int. J. Appl. Earth Obs. Geoinf. 2001, 3, 191–196. [Google Scholar]
- Marghany, M. RADARSAT for oil spill trajectory model. Environ. Modell. Softw. 2004, 19, 473–483. [Google Scholar]
- Topouzelis, K.; Karathanassi, V.; Pavlakis, P.; Rokos, D. Dark formation detection using neural networks. Int. J. Remote Sens. 2008, 29, 4705–4720. [Google Scholar]
- Topouzelis, K.; Stathakis, D.; Karathanassi, V. Investigation of genetic algorithms contribution to feature selection for oil spill detection. Int. J. Remote Sens. 2008. (accepted for publication). [Google Scholar]
- Migliaccio, M; Trangaglia, M. Oil spill observation by SAR: a review. US-Baltic International Symposium, Klaiped, Lithuania, June 14-17, 2004.
- Montali, A.; Giancito, G.; Migliaccio, M.; Gambardella, A. Supervised pattern classification techniques for oil spill classification in SAR images: preliminary results. SEASAR2006 Workshop, ESA-ESRIN, Frascati, Italy, January 23-26, 2006.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Satellite (sensor) | Operative | Owner | Band |
|---|---|---|---|
| SEASAT | 1978 – 1978 | NASA | L |
| ALMAZ | 1991 – 1992 | RSA | S |
| ERS-1 | 1991 – 1996 | ESA | C |
| ERS-2 | 1995 – operating | ESA | C |
| RADARSAT-1 | 1995 – operating | CSA | C |
| RADARSAR-2 | 2007– operating | CSA | C |
| ENVISAT (ASAR) | 2002 – operating | ESA | C |
| ALOS (PALSAR) | 2006 – operating | JAXA | L |
| TerraSAR-X | 2007 – operating | DLR | X |
| Cosmos Skymed-1/2 | 2007 – operating | ASI | X |
| SAR sensor | Mode | Resolution (m) | Pixel Spacing (m) | Swath width (Km) | Incidence angle (°) |
|---|---|---|---|---|---|
| ERS-2 | PRI | 30 × 26.3 | 12.5 × 12.5 | 100 | 20 -26 |
| ENVISAT | IM | 30 × 30 | 12.5 × 12.5 | 100 | 15 - 45 |
| RADARSAT-1 | SCN | 50 × 50 | 25 × 25 | 300 | 20 - 46 |
| RADARSAT-1 | SCW | 100 × 100 | 50 × 50 | 450 – 500 | 20 - 49 |
| ENVISAT | WSM | 150 × 150 | 75 × 75 | 400 | 16 - 44 |
| No | Features | Code |
|---|---|---|
| 1 | Area | A |
| 2 | Perimeter | P |
| 3 | Perimeter to area ratio | P/A |
| 4 | Complexity | C |
| 5 | Shape factor I | SP1 |
| 6 | Shape factor II | SP2 |
| 7 | Object mean value | OMe |
| 8 | Object standard deviation | OSd |
| 9 | Object power to mean ratio | Opm |
| 10 | Background mean value | BMe |
| 11 | Background standard deviation | BSd |
| 12 | Background power to mean ratio | Bpm |
| 13 | Ratio of the power to mean ratios | Opm/Bpm |
| 14 | Mean contrast | ConMe |
| 15 | Max contrast | ConMax |
| 16 | Mean contrast ratio | ConRaMe |
| 17 | Standard deviation contrast ratio | ConRaSd |
| 18 | Local area contrast ratio | ConLa |
| 19 | Mean border gradient | GMe |
| 20 | Standard deviation border gradient | GSd |
| 21 | Max border gradient | GMax |
| 22 | Mean Difference to Neighbors | NDm |
| 23 | Spectral texture | TSp |
| 24 | Shape texture | TSh |
| 25 | Mean Haralick texture | THm |
| # | Method | Images and/or resolution | Preprocessing | Dark Formation detection method | Number of features | Dark formations | Results [method of evaluation] |
|---|---|---|---|---|---|---|---|
| 1 | Probabilistic approach (statistical modeling with a rule based approach) | ERS-1, 84 images | a) Calibration | Adaptive threshold (multiscale pyramid approach and a clustering step) | 11 | 7051 dark, formations, 71 oil spills, 6980 lookalikes | 94% oil spills class. acc. 99% look-alikes class. acc. [leave-one-out approach] |
| 2 | Neural Network (MLP 11:8:4:1) | ERS, 600 low resolution images | a) Resampling, b) Radiometric range correction c) Georeference | Adaptive threshold (Edge detection based on histogram of areas with dark formations) | 11 | 139 dark formations, 71 oil spills, 68 lookalikes | 82% oil spills class. acc. 90% look-alikes class. acc. [leave-one-out approach] |
| 3 | Probabilistic approach (mahalanobis classifier, compound probability classifier) | ERS, Low resolution for inspection and high in case of processing | Simple threshold (image statistical value i.e. average intensity value) | 14 | Training set: 123 dark formations, 80 oil spills, 43 look-alikes Testing set: 21 dark formations, 11 oil spills, 4 uncertain, 6 look-alikes | Mahalanobis: 82% oil spills class. acc. 0% uncertain class. acc. 100% look- alikes class. acc [test set] compound probability: 91% oil spills class. acc. 50% uncertain class. acc. 67% look- alikes class. acc. [test set] | |
| 4 | Probabilistic approach. (multi regression analysis) | ERS-1/2, high resolution. 14 for testing | a) Calibration b) Incidence angle correction c) Land masking | Simple threshold (image statistical values i.e. average intensity value and standard deviation) | 13 | Training set: 390 dark formations, 153 oil spills 237 look-Alikes Testing set: 31 oil spills | A priori percentage of correct classification 90% on training set. 74% oil spill class. acc. [test set] |
| 5 | Fuzzy classification | ERS-1/2, 12 high resolution | a) 8-bit transformation b) Filtering | Adaptive threshold (local contrast and brightness of large image segments) | 13 | Overall performance 99% | |
| 6 | Fuzzy classification | ERS-1/2, low resolution.9 for training, 26 for testing | a) Georeference b) Land masking c) Filtering | Adaptive threshold (local average intensity value and sTable factor) | 5 | Overall performance 88% [test set] | |
| 7 | Neural Network (MLP 10:51:1) | ERS-2, 24 high resolution | a) 8-bit transformation b) Filtering c) Normalization | Neural network (MLP 1:3:1) | 10 | Training set: 35 oil spills, 45 look- alikes Testing set: 34 oil spills, 45 look- alikes | 91% oil spills class. acc. 87% look-alikes class. acc. [test set] |
| 8 | Probabilistic approach (statistical. Modeling with a rule based approach) | Training 71 Radarsat 56 Envisat Testing: 27 Envisat | a) Land masking b) Calibration | Adaptive threshold (multiscale pyramid approach and a clustering step) | 13 | Testing set: 37 oil spills 12110 lookalikes | 78% oil spill class. acc. 99% lookalike class. acc. [test set] |
© 2008 by the authors; licensee Molecular Diversity Preservation International, Basel, Switzerland. This article is an open-access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Topouzelis, K.N. Oil Spill Detection by SAR Images: Dark Formation Detection, Feature Extraction and Classification Algorithms. Sensors 2008, 8, 6642-6659. https://doi.org/10.3390/s8106642
Topouzelis KN. Oil Spill Detection by SAR Images: Dark Formation Detection, Feature Extraction and Classification Algorithms. Sensors. 2008; 8(10):6642-6659. https://doi.org/10.3390/s8106642
Chicago/Turabian StyleTopouzelis, Konstantinos N. 2008. "Oil Spill Detection by SAR Images: Dark Formation Detection, Feature Extraction and Classification Algorithms" Sensors 8, no. 10: 6642-6659. https://doi.org/10.3390/s8106642
APA StyleTopouzelis, K. N. (2008). Oil Spill Detection by SAR Images: Dark Formation Detection, Feature Extraction and Classification Algorithms. Sensors, 8(10), 6642-6659. https://doi.org/10.3390/s8106642