APEX - the Hyperspectral ESA Airborne Prism Experiment
Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
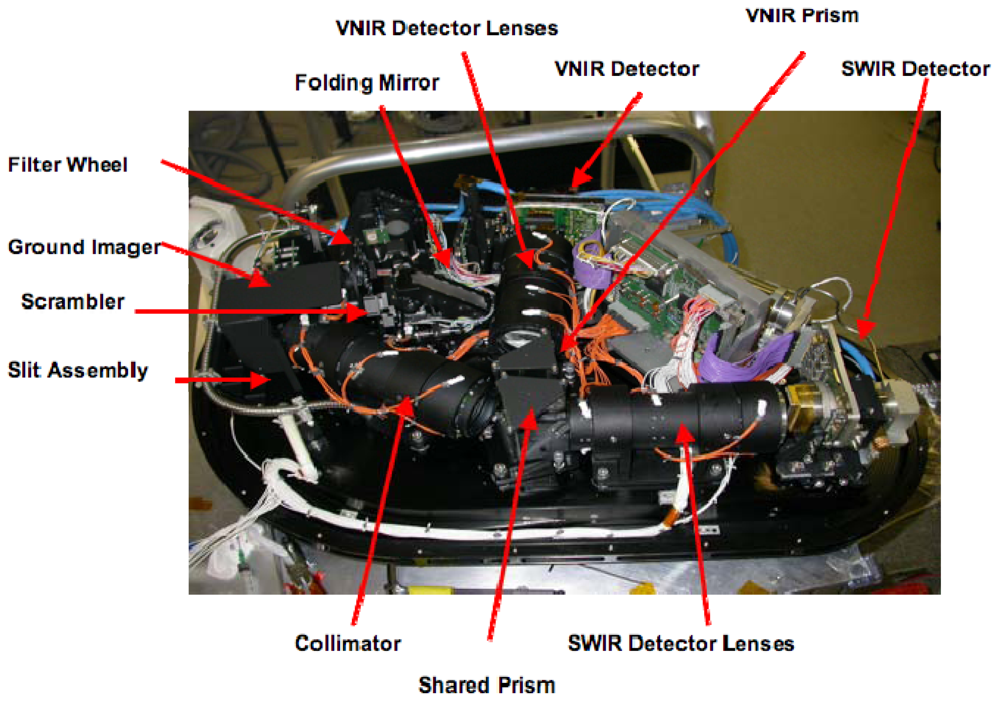
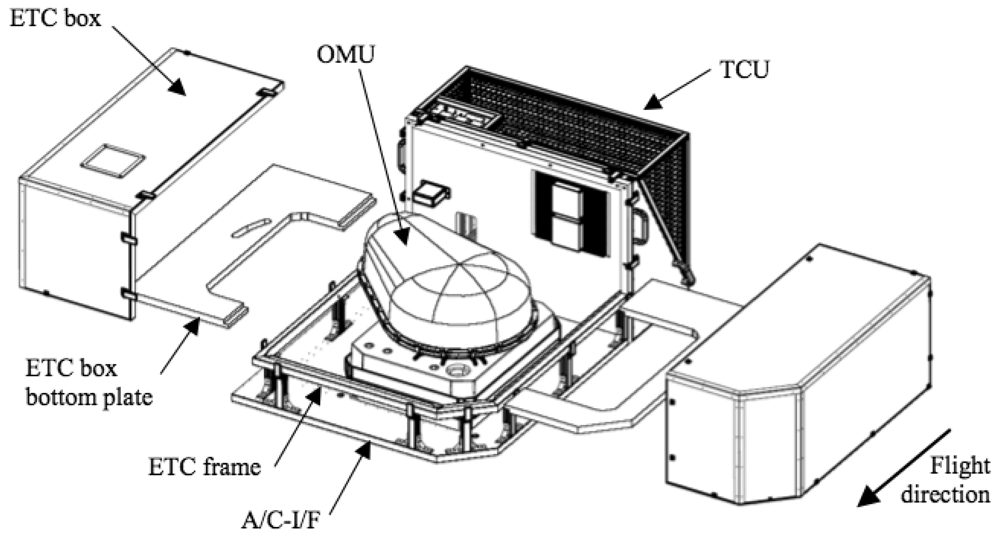
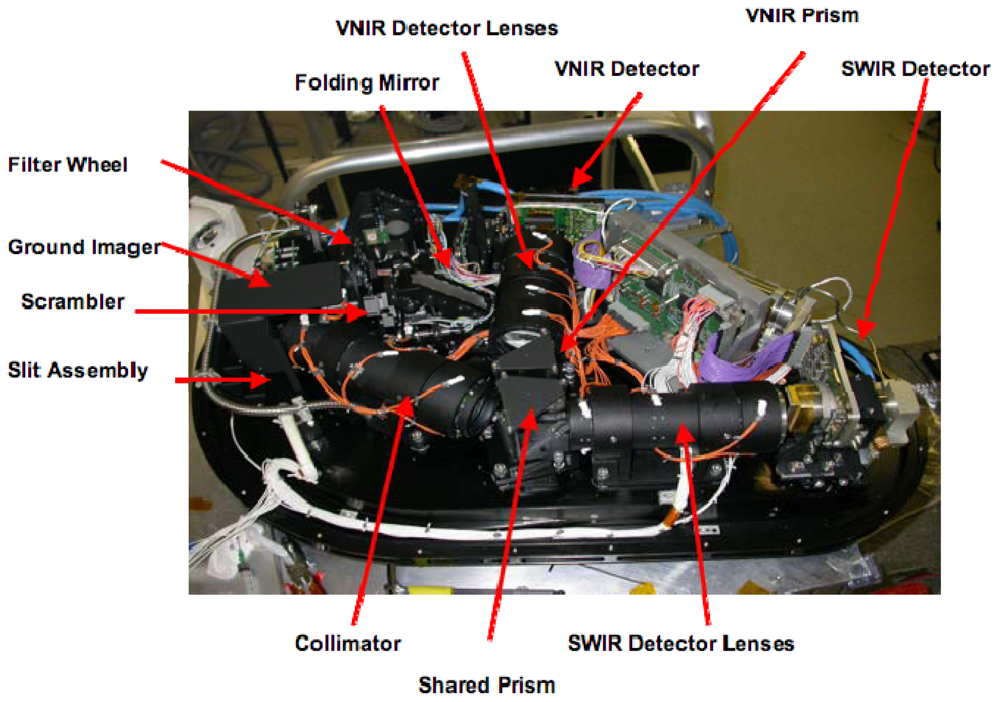
2. Sensor overview
- An entrance window, located underneath the folding mirror.
- One folding mirror, guiding the entering light towards the ground imager.
- A removable polarization scrambler that reduces the polarization sensitivity of the instrument.
- A filter wheel, containing a series of neutral density filters in order to avoid saturation and a series of bandpass filters used in connection with the in-flight calibration facility (IFC).
- A ground imager that images the ground section on the spectrometer rectangular slit, whose dimensions are 0.04 mm × 40 mm.
- A spectrometer section that decomposes the incoming light into its spectral components and re-images the slit image onto two array detectors.
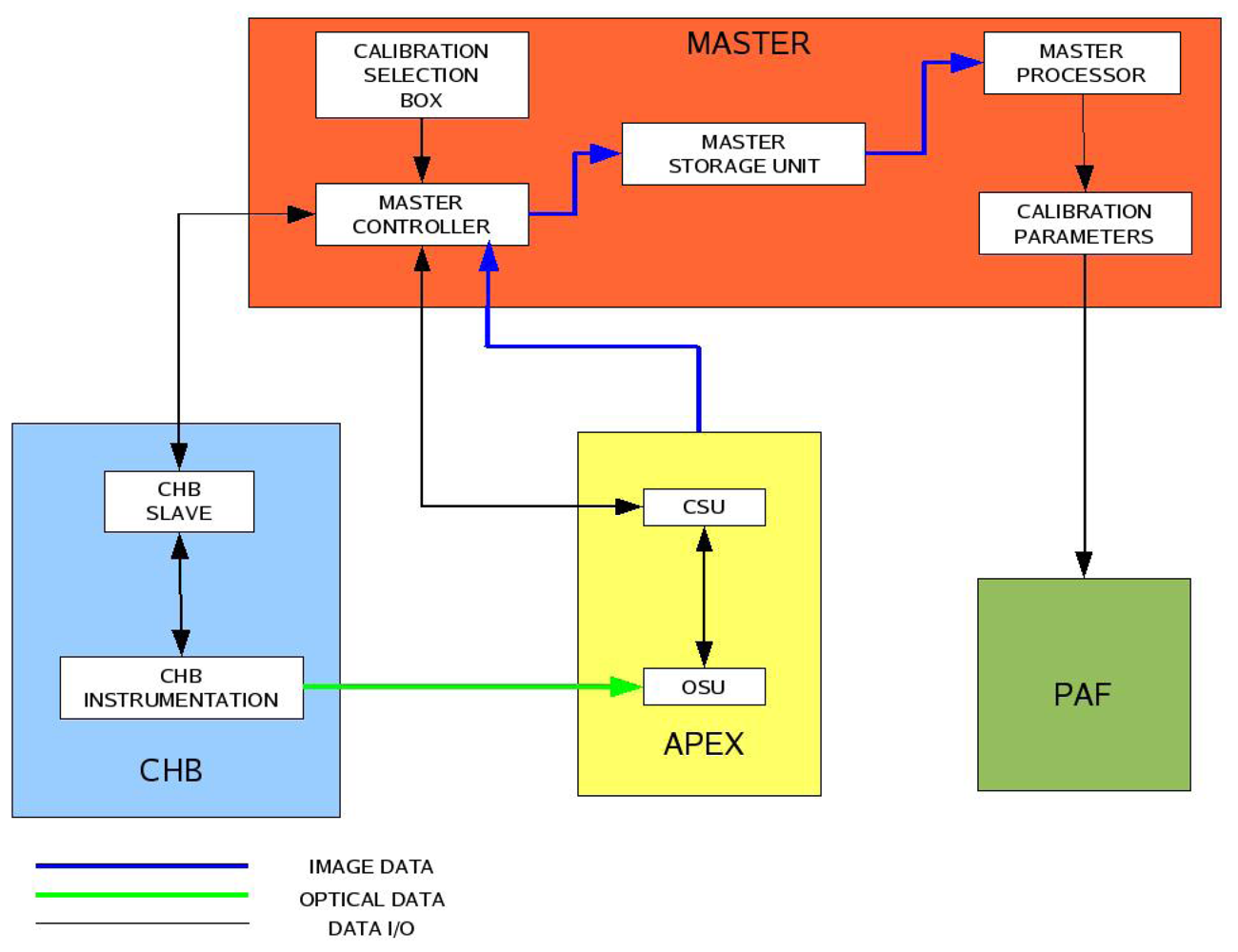
3. Calibration
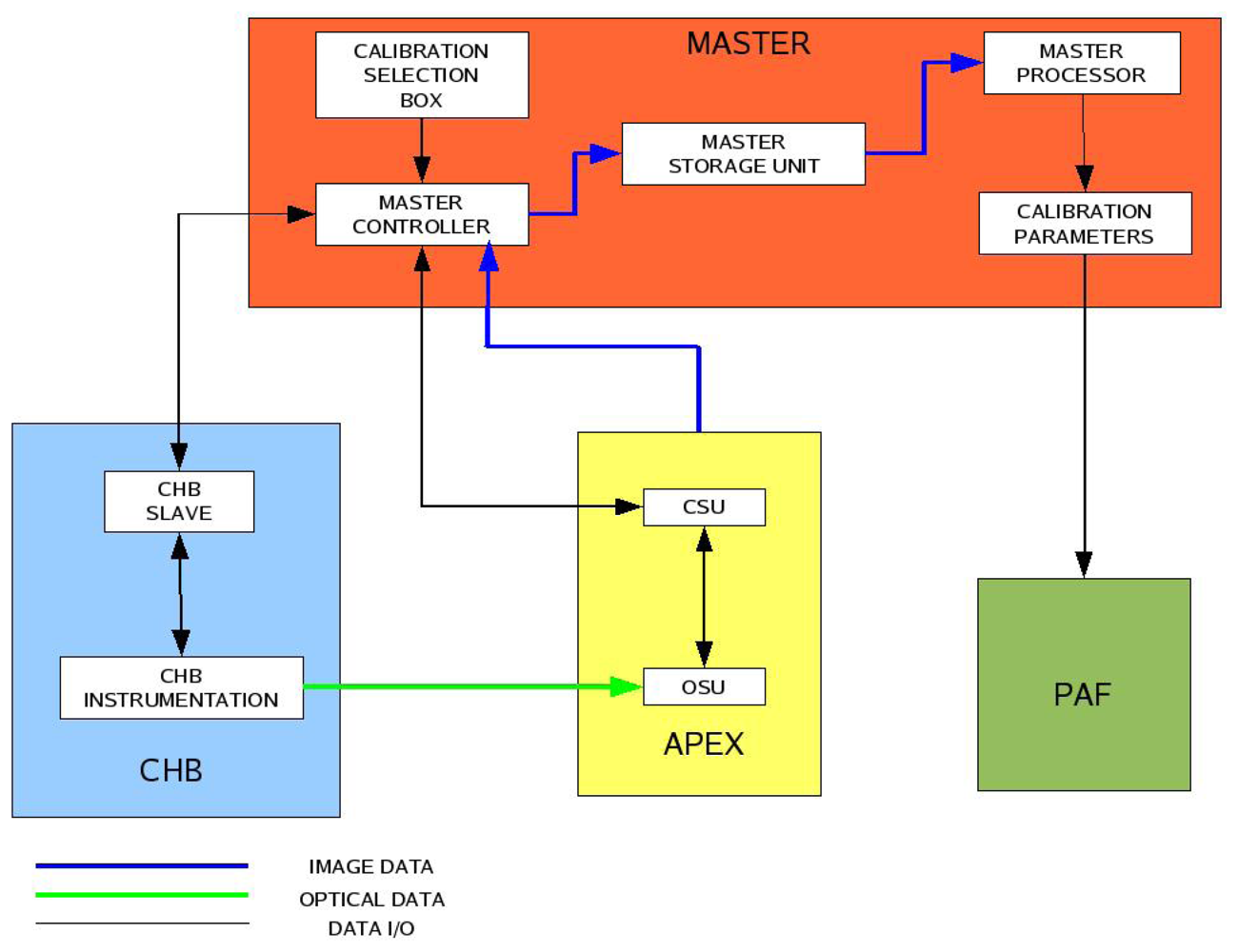
- The Calibration Test Master (CTM): a hardware/software utility [12] that automatically performs the on-ground calibration procedures by interfacing APEX with the Calibration Home Base (CHB), a laboratory installation located at DLR (Deutsches Zentrum für Luft-und Raumfahrt) Oberpfaffenhofen (Germany).
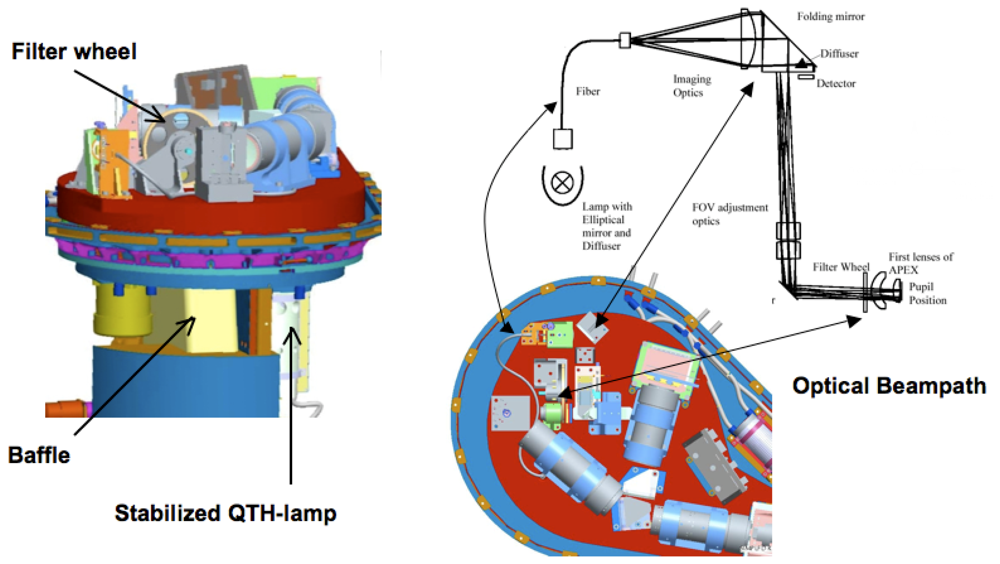
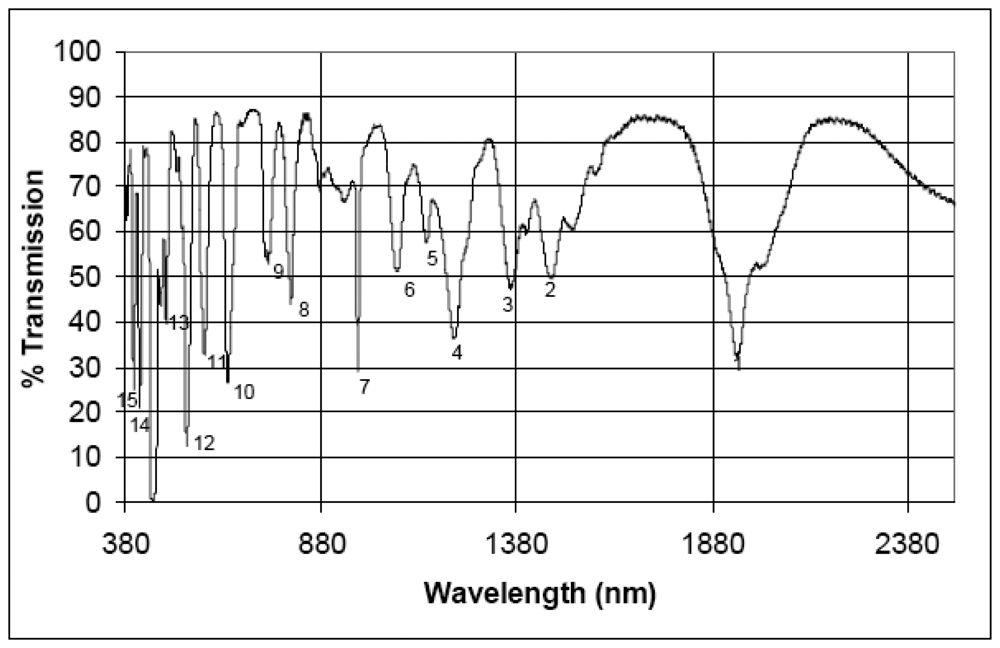
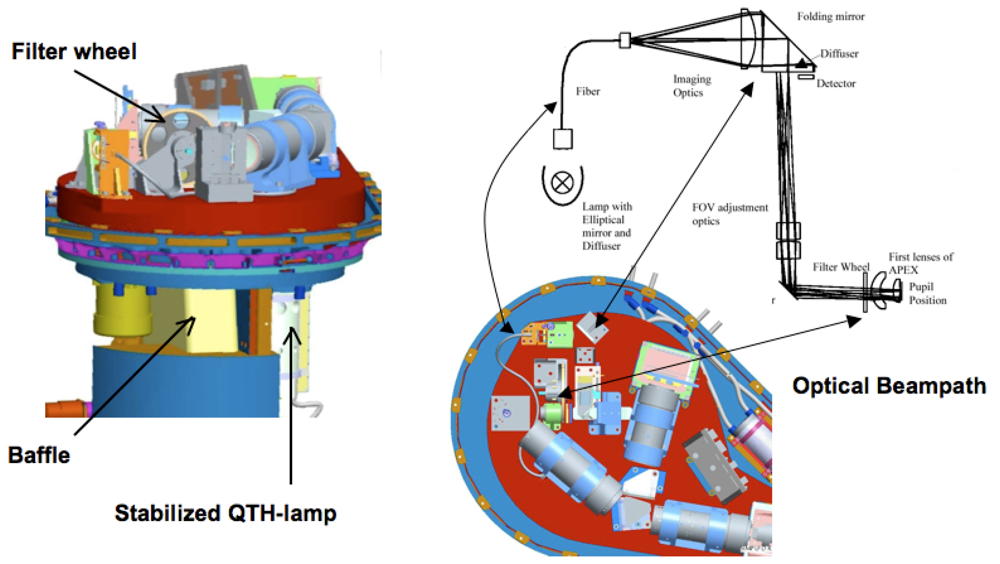
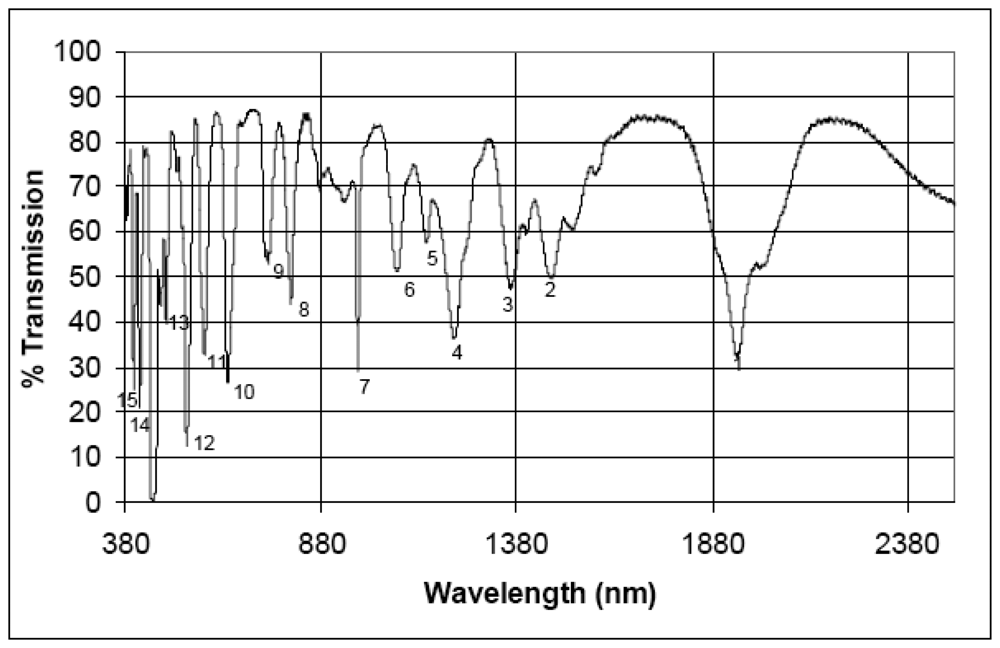
- The In-Flight Calibration facility (IFC): the APEX on-board calibration equipment [13] whose objectives are (a) monitoring the absolute and relative stability of calibration parameters during the operation phases, i.e. the image acquisition, and (b) performing spectral and radiometric in-flight calibration by using a set of customized spectral filters.
- The Level 0-1 Processor: a software component that includes modules for the transformation of raw image data from digital numbers (DN) to physical units of radiance [14,15], i.e. generating radiometrically, spectrally and geometrically well calibrated, uniform data (Level 1C). The level 0-1 processor has been developed by RSL and is integrated into the APEX Processing and Archiving Facility (PAF).
- Quality Flags (QF): those are pixel-wise metadata, directly linked to the image data. They provide users with useful information on both sensor performance and product quality. Namely, QF inform users about (a) sensor quality, e.g. bad pixels, bad columns, noise level, saturation, (b) relative and absolute stability of radiometric and spectral calibration parameters and (c) classification information in order to let users employ only the pixels that are consistent with their application (e.g. vegetation, limnology, aerosols, snow, geology, soil).
- Vicarious Calibration: on-ground campaigns as well as inter-comparison with other sensors data [16] will improve the validation and traceability of the APEX products. RSL owns a number of advanced and state-of-the-art ground equipments, supporting the APEX vicarious calibration approach. The available instrumentation includes the dual-view goniometer system (FIGOS) for bi-directional reflectance distribution function (BRDF) measurements [17], several ASD (Analytical Spectral Devices) spectroradiometers, a certified integrating sphere for absolute radiometric calibration, and Spectralon panels that are tied to a laboratory panel with well known spectral characteristics. Furthermore, the well-established international scientific network gives APEX's science team the chance for sensor data exchanges.
- Scene-based algorithms: those algorithms are directly applied to the acquired data during post-processing in order to identify smile [18], spatial misregistration [19] and to retrieve spectral response function (SRF) shapes [20] and center wavelengths. In some cases, these procedures can generate absolute coefficients that can eventually be used to improve the respective correction and/or refine the characterization of the detector.
3.1. The Calibration Test Master
- The controller, which is the core unit of the CTM.
- The storage unit, which is partly embedded in APEX and partly located on an external desktop computer.
- The processor, whose function is to process all the calibration data.
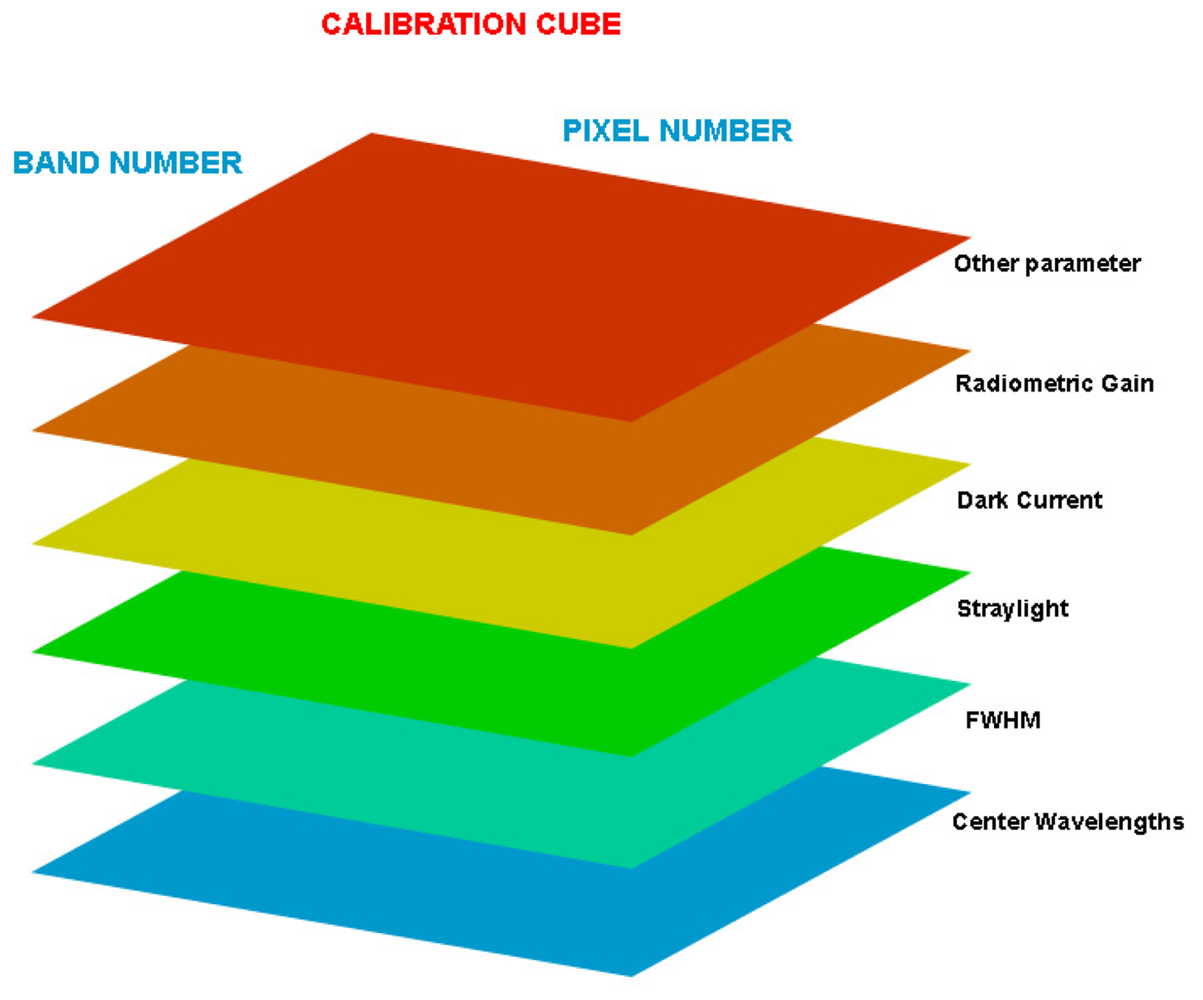
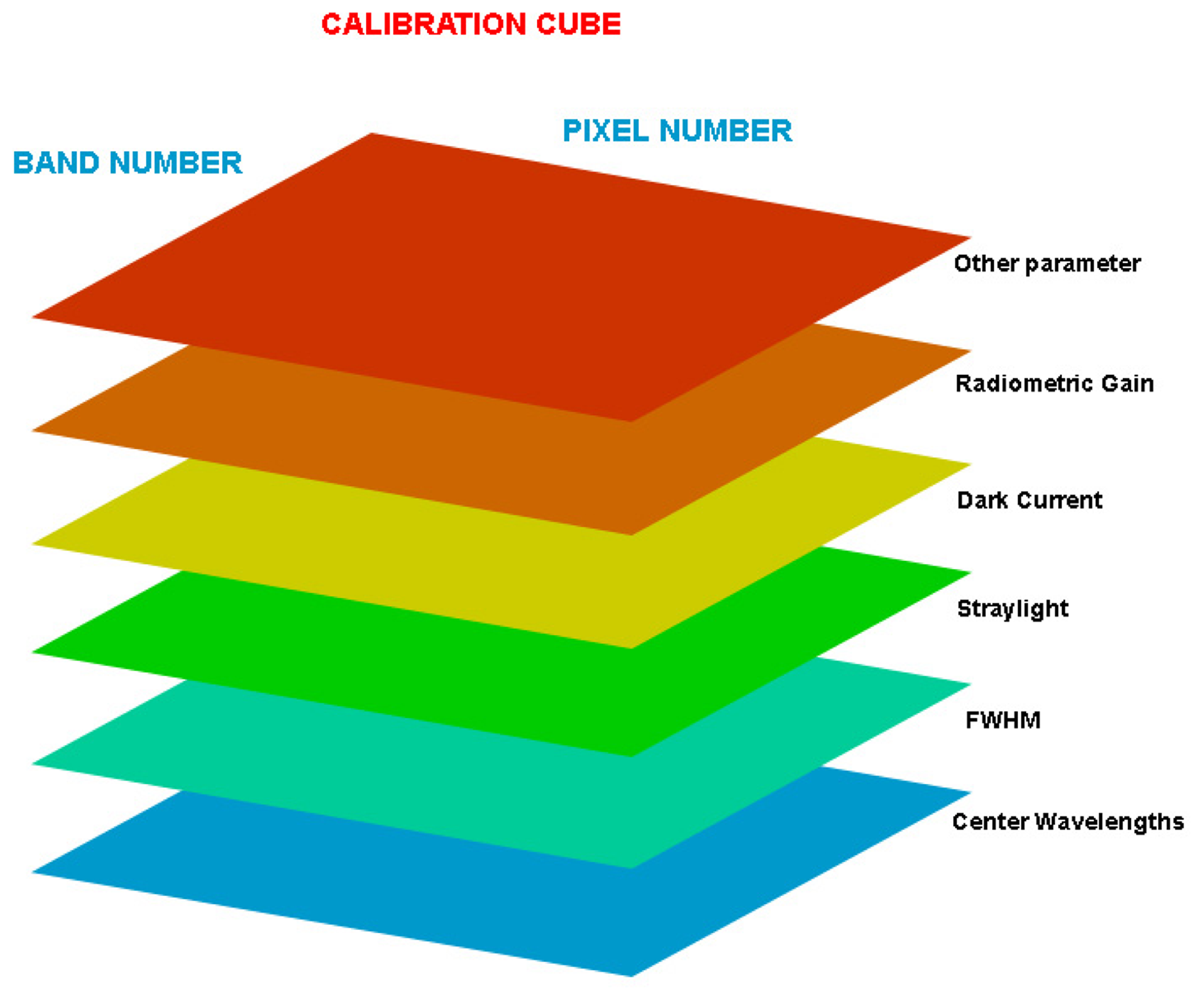
- The VNIR calibration cube.
- The SWIR calibration cube.
- The IFC-CHB calibration cubes (VNIR and SWIR respectively).
3.4. In-Flight Calibration Facility
3.2. The Processing and Archiving Facility
3.3. Vicarious calibration
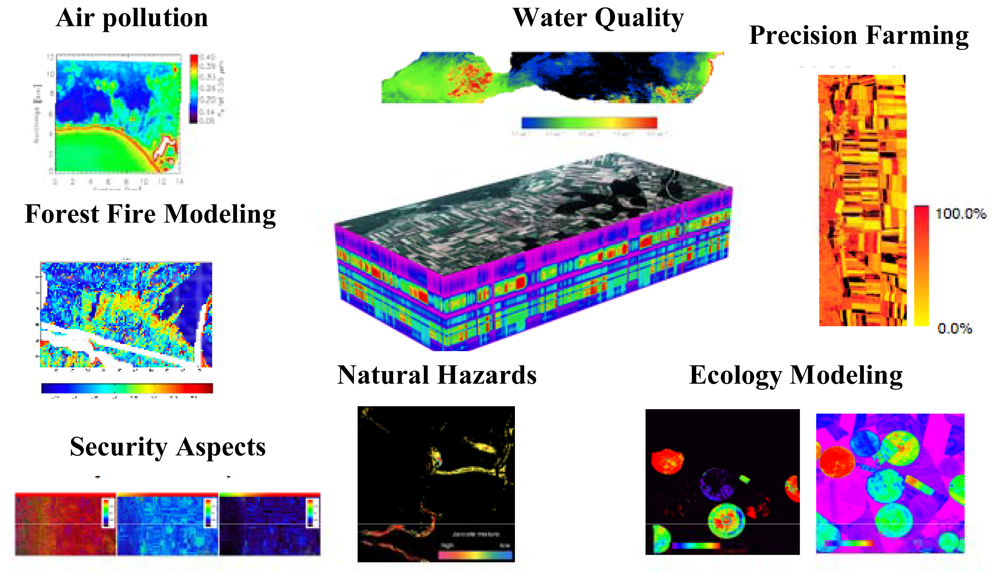
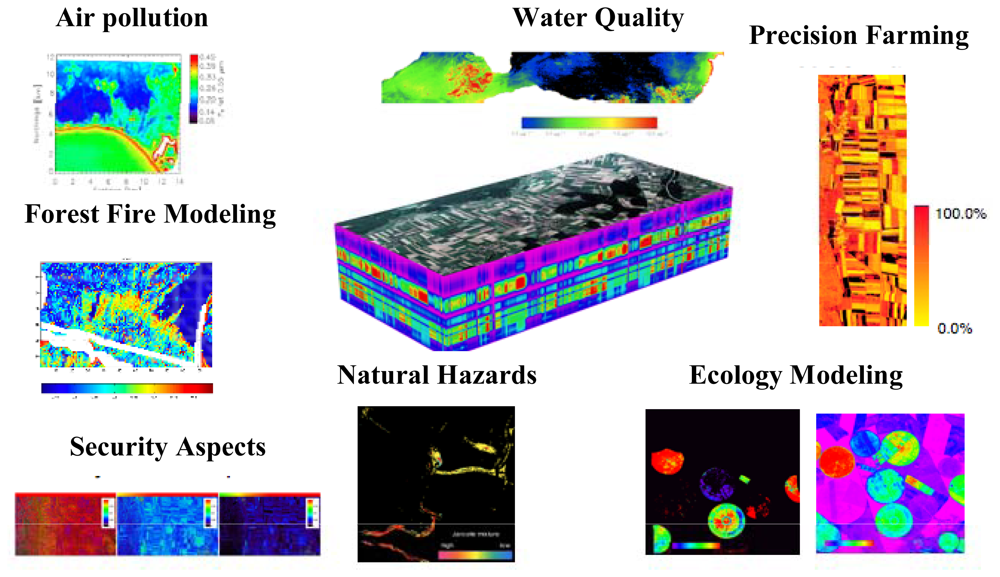
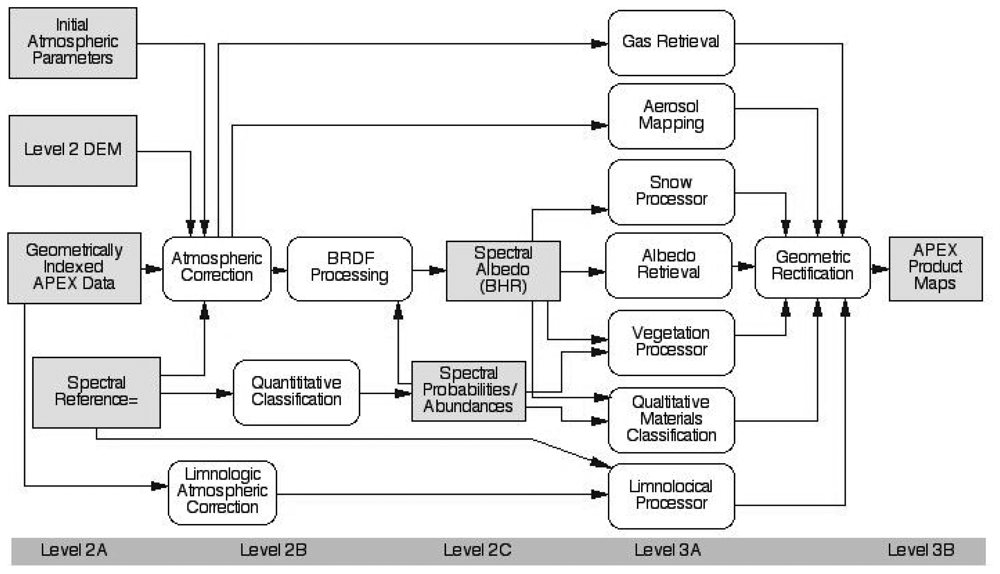
4. Scientific products and application fields
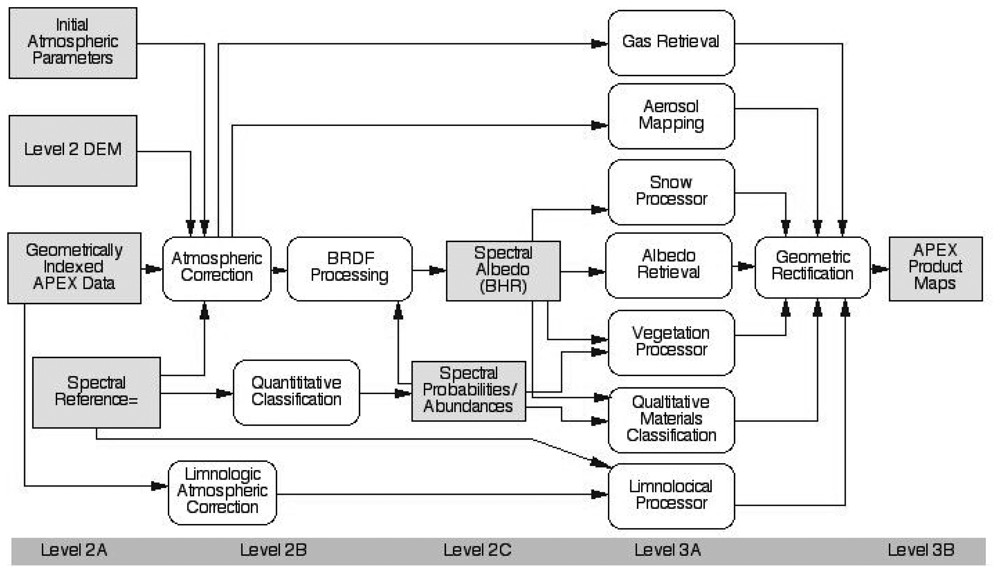
4.1. Scientific data products
- Non-uniform data (Level 1A): these data are containing the originally measured radiometrically calibrated data, without any corrections for smile and frown or co-registration. As such, no interpolation has been performed on the data except for bad pixel replacement. The data are of interest for highest resolution applications such as atmospheric sensing in the VNIR spectral range.
- Partially-uniform data (Level 1B): the specified quality of the APEX system defines small deviations regarding optical aberrations within each detector (i.e. below 0.2 pixels). When correcting for these smile and frown effects only, a set of detector-wise uniform data may be produced. Such data sets are well suited for applications making use of the spectral range of one detector only, e.g., geological applications in the SWIR or limnological applications in the VNIR.
- Fully-uniform data (Level 1C): co-registration (i.e. synchronization) [24] between the detectors is expected to be better than one pixel offset. Therefore, the creation of a fully uniform data set is feasible by interpolation of the SWIR detector outputs onto the spatial response of the (uniformized) VNIR detector. A spectral cut-off limit is defined between the detectors, in order to produce a contiguous spectrum across both detectors after interpolation. This level is expected to be the normal, and most requested output of the APEX calibration chain.
4.2. Water quality monitoring
4.3. Vegetation analysis and ecology
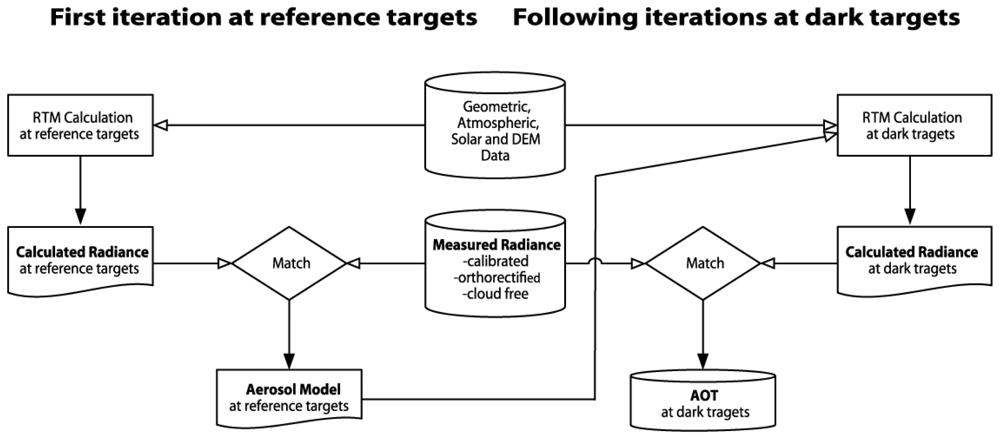
4.4. Aerosols retrieval
4.5. Materials classification
4.6. Snow characterization
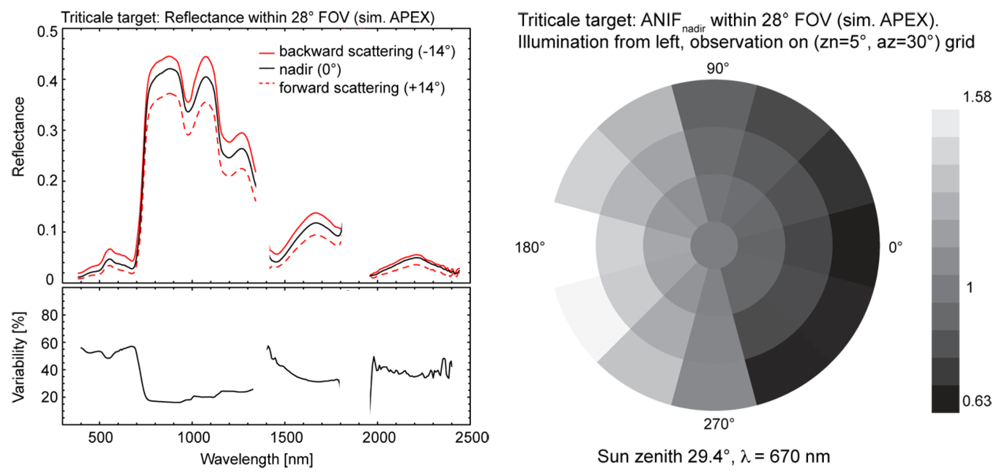
4.7. BRDF
4.8. Spectral Database: SPECCHIO
5. Conclusions
Acknowledgments
References and Notes
- Chrien, T.G.; Green, R.O.; Eastwood, M.L. Accuracy of the Spectral and Radiometric Laboratory Calibration of the Airborne Visible/Infrared Imaging Spectrometer (AVIRIS). Imaging Spectroscopy of the Terrestrial Environment 1990, 1298, 37–49. [Google Scholar]
- Babey, S.K.; Anger, C.D. Compact airborne spectrographic imager (CASI): a progress review. Imaging Spectrometry of the Terrestrial Environment 1993, 1937, 152–163. [Google Scholar]
- Spatz, D.; Aymard, W. Airborne Scanner (GERIS) Imagery of the Delamar Gold Mining District, Lincoln County, Nevada. 1991 ACSM-ASPRS Fall Convention Technical Papers 1991. [Google Scholar]
- Lehmann, F.; Oertel, D.; Richter, R.; Strobl, P.; Rothfuβ, H.; Mueller, A.; Hausknecht, P.; Tischler, S.; Mueller, R.; Beran, D.; Fries, J.; Boehl, R.; Obermeier, P. The Digital Airborne Imaging Spectrometer DAIS 7915, Hyperspectral Applications with a New Sensor. ISSSR Proceedings CD-ROM 1995. [Google Scholar]
- Cocks, T.; Jenssen, R.; Stewart, A.; Wilson, I.; Shields, T. The HYMAP Airborne Hyperspectral Sensor: The System, Calibration and Performance. In 1st EARSEL Workshop on Imaging Spectroscopy; Zürich, October 1998. [Google Scholar]
- Sobrino, J.A.; Jiménez-Muñoza, J.C.; Zarco-Tejadab, P.J.; Sepulcre-Cantób, G.; de Miguel, E. Land surface temperature derived from airborne hyperspectral scanner thermal infrared data. Remote Sensing of Environment 2006, 102, 99–115. [Google Scholar]
- Nieke, J.; Frerick, J.; Stroede, C.; Mavrocordatos, C.; Berruti, B. Status of the optical payload and processor development of ESA's Sentinel 3 mission. Abstract for IEEE International Geoscience & Remote Sensing Symposium, Boston, Massachusetts, U.S.A, July 6-11 2008.
- Sobrino, J.A.; Soria, G.; Jimenez-Munoz, J.C.; Franch, B.; Hidalgo, V.; Moreno, J.; Sepulcre-Canto, G.; Zarco-Tejada, P.J.; Moya, I. Surface temperature in the context of FLuorescence EXplorer (FLEX) mission. In IEEE International, Geoscience and Remote Sensing Symposium, 23-28 July, 2007; IGARSS 2007. 2007; pp. 3765–3768. [Google Scholar]
- Levelt, P.F.; van den Oord, G.H.J.; Dobber, M.; Eskes, H.; van Weele, M.; Veefkind, P.; van Oss, R.; Aben, I.; Jongma, R.T.; Landgraf, J.; de Vries, J.; Visser, H. TROPOMI and TROPI: UV/VIS/NIR/SWIR instruments. Proceedings of SPIE, San Diego; 2006. [Google Scholar]
- Stuffler, T.; Kaufmann, H.; Hofer, S.; Förster, K.-P.; Schreier, G.; Müller, A.; Eckardt, A.; Bach, H.; Penne, B.; Benz, U.; Haydn, R. The EnMAP hyperspectral imager- An advanced optical payload for future applications in Earth observation programmes. Acta Astronautica 2007, 61, 115–120. [Google Scholar]
- Mostert, S.; Milne, G.W.; Steyn, H.; Schoonwinkel, A. The ZASat Satellite Programm Innovation and Application. 0-7803-8142-4/04, IEEE 2003. [Google Scholar]
- Dell'Endice, F.; Nieke, J.; Brazile, J.; Schläpfer, D.; Hüni, A.; Itten, K. Automatic Calibration and Correction Scheme for APEX. 5th EARSeL Workshop on Imaging Spectroscopy, Bruges, Belgium, April 23-25, 2007.
- Nieke, J.; Kaiser, J.W.; Schläpfer, D.; Brazile, J.; Itten, K.I.; Strobl, P.; Schaepman, M.E.; Ulbrich, G. Calibration Methodology for the Airborne Dispersive Pushbroom Imaging Spectrometer (APEX). SPIE 2004, Vol. 5570. [Google Scholar]
- Biesemans, J.; Sterckx, S.; Knaeps, E.; Vreys, K.; Adriaensen, S.; Hooyberghs, J.; Meuleman, K.; Kempeneers, P.; Deronde, B.; Everaerts, J.; Schlaepfer, D.; Nieke, J. Image processing working flows for airborne remote sensing. 5th EARSeL Workshop on Imaging Spectroscopy, Bruges, Belgium, April 23-25, 2007.
- Hüni, A.; Biesemans, J.; Meuleman, K.; Dell'Endice, F.; Schläpfer, D.; Adriaensen, S.; Kempenaers, S.; Odermatt, D.; Kneubühler, M.; Nieke, J. Structure, Components and Interfaces of the Airborne Prism Experiment (APEX) Processing and Archiving Facility. IEEE Transactions on Geoscience and Remote Sensing Submitted. 2008. [Google Scholar]
- Strub, G.; Beisl, U.; Schaepman, M.; Schlaepfer, D.; Dickerhof, C.; Itten, K. Evaluation of diurnal hyperspectral HDRF data acquired with the RSL field goniometer during the DAISEX'99 campaign. Journal of Photogrammetry and Remote Sensing 2002, 57, 184–193. [Google Scholar]
- Schopfer, J.; Dangel, S.; Kneubühler, M.; Itten, K.I. Dual Field-of-View Goniometer System FIGOS. International. Archives of Photogrammetry Remote Sensing and Spatial Information Sciences ISPRS, Davos, Switzerland; 2007; Vol. XXXVI, part 7/C50. pp. 493–498. [Google Scholar]
- Gao, B.C.; Montes, M.J.; Davis, C.O. Refinement of wavelength calibrations of hyperspectral imaging data using a spectrum-matching technique. Remote Sensing of Environment 2004, 90, 424–433. [Google Scholar]
- Dell'Endice, F.; Nieke, J.; Schläpfer, D.; Itten, K.I. A scene based method for spatial misregistration detection in hyperspectral imagery. Applied Optics 2007, 46, 1–14. [Google Scholar]
- Brazile, J.; Neville, R.A.; Staenz, K.; Schläpfer, D.; Sun, L.; Itten, K.I. Scene-based spectral response function shape discernibility for the APEX imaging spectrometer. IEEE Geoscience and Remote Sensing Letters 2006, 3, 414–418. [Google Scholar]
- Nieke, J.; Schläpfer, D.; Dell'Endice, F.; Brazile, J.; Itten, K.I. Uniformity of Imaging Spectrometry Data Products. IEEE Transactions on Geoscience and Remote Sensing Accepted for publication. 2007. [Google Scholar]
- Nieke, J.; Itten, K.; Debryun, W.; the APEX Team. The Airborne Imaging Spectrometer APEX: From Concept to Realisation. 4th EARSeL Workshop on Imaging Spectroscopy, Warsaw, 2005 2005, 73–80. [Google Scholar]
- Mattson, T.G.; Sanders, B.A.; Massingill, B.L. Patterns for Parallel Programming; Addison-Wesley Professional: Boston, 2004. [Google Scholar]
- Schläpfer, D.; Nieke, J.; Itten, K. Spatial PSF non-uniformity effects in airborne pushbroom imaging spectrometry data. IEEE Transactions on Geoscience and Remote Sensing 2007, 45, 458–468. [Google Scholar]
- Abdou, W.A.; Bruegge, C.J.; Helmlinger, M.C.; Conel, J.E.; Pilorz, S.H.; Ledeboer, W.; Gaitley, B.J.; Thome, K.J. Vicarious calibration experiment in support of the Multi-angle Imaging SpectroRadiometer. IEEE Transactions on Geoscience and Remote Sensing 2002, 40, 1500–1511. [Google Scholar]
- Bruegge, C.J.; Chrien, N.L.; Ando, R. R.; Diner, D. J.; Abdou, W.A.; Helmlinger, M.C.; Pilorz, S.H.; Thome, K.J. Early validation of the multi-angle Imaging SpectroRadiometer (MISR) radiometric scale. IEEE Transactions on Geoscience and Remote Sensing 2002, 40, 1477–1492. [Google Scholar]
- Berk, A.; Bernstein, L.S.; Robertson, D.C. MODTRAN: A Moderate Resolution Model for LOWTRAN7; Air Force Geophysics Lab: Bedford, MA, Report GL-TR-89-0122; 1989. [Google Scholar]
- Thome, K.J. Absolute radiometric calibration of Landsat 7 ETM+ using the reflectance-based method. Remote Sensing of Environment 2001, 78, 27–38. [Google Scholar]
- Kneubühler, M.; Schaepman, M.; Thome, K.; Schäpfer, D. MERIS/ENVISAT Vicarious Calibration Over Land. Proc. SPIE 5234, 10th Int. Symposium, Barcelona, October 8-12, 2003; 2003; pp. 614–623. [Google Scholar]
- Schaepman, M. Spectrodirectional Remote Sensing: From Pixels to Processes. Int. J. of Applied Earth Eobservation and Geoinformation 2007, 9, 204–223. [Google Scholar]
- Schläpfer, D.; Nieke, J.; Dell'Endice, F.; Hueni, A.; Biesemans, J.; Meuleman, K.; Itten, K. Optimized Workflow for APEX level 2/3 Processing. Proc. 5th EARSeL Workshop on Imaging Spectroscopy, Bruges (B), April 23-25; CD-ROM. 2007. [Google Scholar]
- Richter, R.; Schläpfer, D. Geo-atmospheric processing of airborne imaging spectrometry data. Part 2: Atmospheric/Topographic Correction. International Journal of Remote Sensing 2002, 23, 2631–2649. [Google Scholar]
- Martonchik, J.V.; Bruegge, C.J.; Strahler, A.H. A Review of Reflectance Nomenclature Used in Remote Sensing. Remote Sensing Reviews 2000, 19, 9–20. [Google Scholar]
- Mobley, C.D. Light and Water; Academic Press Inc: San Diego, ISBN 0-12-502750-8; 1994. [Google Scholar]
- Brezonik, P.L.; Menken, K.; Bauer, M. Landsat-based remote sensing of lake water quality characteristics, including chlorophyll and colored dissolved organic matter (CDOM). Lake and Reservoir Management 2005, 21, 373–382. [Google Scholar]
- Doerffer, R.; Schiller, H. The MERIS Case 2 water algorithm. International Journal of Remote Sensing 2007, 28, 517–535. [Google Scholar]
- Heege, T.; Fischer, J. Mapping of water constituents in Lake Constance using multispectral airborne scanner data and a physically based processing scheme. Canadian Journal of Remote Sensing 2004, 30(1), 77–86. [Google Scholar]
- Odermatt, D.; Heege, T.; Nieke, J.; Kneubühler, M.; Itten, K.I. Evaluation of a physically based Inland Water Processor for MERIS Data. In EARSeL, Proc. EARSeL SIG Remote Sensing of the Coastal Zone, Bolzano, Italy; 2007. [Google Scholar]
- Miksa, S.; Haese, C.; Heege, T. Time series of water constituents and primary production in Lake Constance using satellite data and a physically based modular inversion and processing system. Proc. Ocean Optics Conf. XVIII, (Montreal, Canada) 2006. [Google Scholar]
- Curran, P.J. Remote Sensing of Foliar Chemistry. Remote Sensing of Environment 1989, 30, 271–278. [Google Scholar]
- Ustin, S. Remote sensing for natural resource management and environmental monitoring; Vol. 4, John Wiley & Sons: Hoboken, NJ, 2004; pp. 679–729. [Google Scholar]
- Goodenough, D.G.; Li, J.Y.; Dyk, A. Combining hyperspectral remote sensing and physical modeling for applications in land ecosystems. IEEE International Geoscience And Remote Sensing Symposium (IGARSS), Denver, Colorado; 2006. [Google Scholar]
- Koetz, B. Estimating Biophysical and Biochemical Properties over Heterogeneous Vegetation Canopies–Radiative Transfer Modeling in Forest Canopies Based on Imaging Spectrometry and Lidar. PhD Thesis, Remote Sensing Laboratories, Dept. of Geography, University of Zurich, Zurich, 2006. [Google Scholar]
- Huber, S.; Kneubuehler, M.; Koetz, B.; Itten, K.I. The potential of spectrodirectional CHRIS/PROBA data for biochemistry estimation. Envisat Symposium, Montreux, Switzerland; ESA Communication Production Office, ESTEC, Noordwijk, The Netherlands; 2007. [Google Scholar]
- Goetz, S.J.; Bunn, A.G.; Fiske, G.J.; Houghton, R.A. Satellite-observed photosynthetic trends across boreal North America associated with climate and fire disturbance. Proceedings of the National Academy of Sciences of the United States of America; 2005; 102, pp. 13521–13525. [Google Scholar]
- Kurz, W.; Apps, M. Developing Canada's National Forest Carbon Monitoring, Accounting and Reporting System to Meet the Reporting Requirements of the Kyoto Protocol. Mitigation and Adaptation Strategies for Global Change 2006, 11, 33–43. [Google Scholar]
- Dorigo, W.A.; Zurita-Milla, R.; de Wit, A.J.W.; Brazile, J.; Singh, R.; Schaepman, M.E. A review on reflective remote sensing and data assimilation techniques for enhanced agroecosystem modeling. International Journal of Applied Earth Observation and Geoinformation 2007, 9, 165–193. [Google Scholar]
- Moran, M.S.; Inoue, Y.; Barnes, E. Opportunities and limitations for image-based remote sensing in precision crop management. Remote Sensing of Environment 1997, 61, 319–346. [Google Scholar]
- Brisco, B.; Brown, R.J.; Hirose, T.; Staenz, K. Precision Agriculture and the Role of Remote Sensing: A Review. Canadian Journal of Remote Sensing 1998, 24, 315–327. [Google Scholar]
- Turner, W.; Spector, S. Remote sensing for biodiversity science and conservation trends. Ecology & Evolution 2003, 18, 306–314. [Google Scholar]
- Schaepman, M.; Malenovsky, Z. Bridging scaling gaps for the assessment of biodiversity from space. The full picture; GEO Secretariat: Geneva, Switzerland, GEO; pp. 258–261. 2007. [Google Scholar]
- Kalacska, M.; Sanchez-Azofeifa, G.A. Ecological fingerprinting of ecosystem succession: Estimating secondary tropical dry forest structure and diversity using imaging spectroscopy. Remote Sensing of Environment 2007, 108, 82–96. [Google Scholar]
- Asner, G.P.; Vitousek, P.M. Remote analysis of biological invasion and biogeochemical change. Proceedings of the National Academy of Sciences 2005, 102(4), 383-4–386. [Google Scholar]
- Seidel, F.; Nieke, J.; Schlaepfer, D.; Hoeller, R.; von Hoyningen-Huene, W.; Itten, I.K. Aerosol retrieval for APEX airborne imaging spectrometer: a preliminary analysis. Proc. SPIE 2005, 5979, 548–557. [Google Scholar]
- Seidel, F.; Schlaepfer, D.; Nieke, J.; Itten, I.K. Sensor performance requirements for the retrieval of atmospheric aerosols by airborne optical remote sensing. Sensors 2008, 8, 1901–1914. [Google Scholar]
- Kruse, F.A.; Lefkoff, A.B.; Boardman, J.B.; Heidebrecht, K.B.; Shapiro, A.T.; Barloon, P.J.; Goetz, A.F.H. The Spectral Image Processing System (SIPS) - Interactive Visualization and Analysis of Imaging Spectrometer Data. Remote Sensing of Environment 1993, 44, 145–163. [Google Scholar]
- Boardman, J.W. Inversion of imaging spectrometry data using singular value decomposition Proceedings. IGARSS '89, 12th Canadian Symposium on Remote Sensing 1989, 1, 11–14. [Google Scholar]
- Robert, D.A.; Gardner, M.; Church, R.; Ustin, S.; Scheer, G.; Green, R.O. Mapping Chaparral in the Santa Monica Mountains Using Multiple Endmember Spectral Mixture Models. Remote Sensing Environment 1998, 65, 267–279. [Google Scholar]
- Clark, R.N.; Gallagher, A.J.; Swayze, G.A. Material absorption band depth mapping of imaging spectrometer data using the complete band shape least-squares algorithm simultaneously fit to multiple spectral features from multiple materials. Proceedings of the Third Airborne Visible/Infrared Imaging Spectrometer (AVIRIS) Workshop; 1990; 91, pp. 176–186. [Google Scholar]
- Chen, J.Y.; Reed, I.S. A detection algorithm for optical targets in clutter. IEEE Transactions on Aerospace and Electronic Systems, AES-23 /1 1987, 46–59. [Google Scholar]
- Boardman, J.W. Leveraging the High Dimensionality of AVIRIS Data for Improved Sub - Pixel Target Unmixing and Rejection of False Positives: Mixture Tuned Matched Filtering. In Summaries of the Seventh Annual JPL Airborne Geoscience Workshop; Pasadena, CA, 1998. [Google Scholar]
- Cortes, C.; Vapnik, V. Support-Vector Networks Machine Leaming; 1995; Volume 20, pp. 273–297. [Google Scholar]
- de Kok, R.; Schneider, T.; Ammer, U. Object-Based Classification and Applications in the Alpine Forest Environment. International Archives of Photogrammetry and Remote Sensing 1999, 32, 7–4, 3 W6. [Google Scholar]
- McClung, M.; Schaerer, P. The Avalanche Handbook, 3rd ed.; Mountaineers Books: Seattle, Washington, 2006. [Google Scholar]
- Warren, S. Optical Properties of Snow. Reviews of Geophysics and Space Physics 1982, 20, 67–89. [Google Scholar]
- Dozier, J.; Painter, T.H. Multispectral and hyperspectral remote sensing of alpine snow properties. Annual Review of Earth and Planetary Sciences 2004, 32, 465–494. [Google Scholar]
- Nicodemus, F.E.; Richmond, J.C.; Hsia, J.J.; Ginsberg, I.W.; Limperis, T. Geometrical Considerations and Nomenclature for Reflectance.; Institute for Basic Standards, National Bureau of Standards: Washington D.C., USA, 1977. [Google Scholar]
- Beisl, U. Correction of bidirectional effects in imaging spectrometer data. unpublished. PhD Thesis, University of Zurich, Zürich, Switzerland, 2001. [Google Scholar]
- Weiss, M.; Baret, F.; Myneni, R.B.; Pragnere, A.; Knyazikhin, Y. Investigation of a model inversion technique to estimate canopy biophysical variables from spectral and directional reflectance data. Agronomie 2002, 20, 3–22. [Google Scholar]
- Painter, T. The Hyperspectral Bidirectional Reflectance of Snow: Modeling, Measurement and Instrumentation. Unpublished. PhD Thesis, University of Santa Barbara, Santa Barbara, USA, 2002. [Google Scholar]
- Gobron, N.; Pinty, B.; Verstraete, M.M.; Martonchik, J.V.; Knyazikhin, Y.; Diner, D.J. Potential of multiangular spectral measurements to characterize land surfaces: Conceptual approach and exploratory application. Journal of Geophysical Research-Atmospheres 2000, 105, 17539–17549. [Google Scholar]
- Hüni, A.; Nieke, J.; Schopfer, J.; Kneubühler, M.; Itten, K. 2nd Generation of RSL's Spectrum Database SPECCHIO., 10th Intl. Symposium on Physical Measurements and Spectral Signatures in Remote Sensing, Davos (CH); Schaepman, M. E., Liang, S., Groot, N. E., Kneubühler, M., Eds.; ISTRS: Davos (CH), 2007; Vol. XXXVI, Part 7/C50. pp. 505–510.
- Hüni, A.; Nieke, J.; Schopfer, J.; Kneubühler, M.; Itten, K. The spectral database SPECCHIO for improved long term usability and data sharing. Computers & Geosciences Accepted for publication. 2008. [Google Scholar]
- MySQL AB, MySQL Reference Manual. MySQL AB: Cupertino, CA, USA, 2007. http://dev.mysql.com/doc/refman/5.0/en/index.html.
- JavaTM 2 Platform Standard Edition. Version 5.0; Sun Microsystems Inc.: Santa Clara, CA, 2006.
- Hüni, A.; Nieke, J.; Schopfer, J.; Kneubühler, M.; Itten, K. Metadata of Spectral Data Collections. 5th EARSeL Workshop on Imaging Spectroscopy, Bruges, Belgium, April 2007; 2007; pp. 23–25. [Google Scholar]
© 2008 by the authors; licensee Molecular Diversity Preservation International, Basel, Switzerland. This article is an open-access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Itten, K.I.; Dell’Endice, F.; Hueni, A.; Kneubühler, M.; Schläpfer, D.; Odermatt, D.; Seidel, F.; Huber, S.; Schopfer, J.; Kellenberger, T.; et al. APEX - the Hyperspectral ESA Airborne Prism Experiment. Sensors 2008, 8, 6235-6259. https://doi.org/10.3390/s8106235
Itten KI, Dell’Endice F, Hueni A, Kneubühler M, Schläpfer D, Odermatt D, Seidel F, Huber S, Schopfer J, Kellenberger T, et al. APEX - the Hyperspectral ESA Airborne Prism Experiment. Sensors. 2008; 8(10):6235-6259. https://doi.org/10.3390/s8106235
Chicago/Turabian StyleItten, Klaus I., Francesco Dell’Endice, Andreas Hueni, Mathias Kneubühler, Daniel Schläpfer, Daniel Odermatt, Felix Seidel, Silvia Huber, Jürg Schopfer, Tobias Kellenberger, and et al. 2008. "APEX - the Hyperspectral ESA Airborne Prism Experiment" Sensors 8, no. 10: 6235-6259. https://doi.org/10.3390/s8106235
APA StyleItten, K. I., Dell’Endice, F., Hueni, A., Kneubühler, M., Schläpfer, D., Odermatt, D., Seidel, F., Huber, S., Schopfer, J., Kellenberger, T., Bühler, Y., D’Odorico, P., Nieke, J., Alberti, E., & Meuleman, K. (2008). APEX - the Hyperspectral ESA Airborne Prism Experiment. Sensors, 8(10), 6235-6259. https://doi.org/10.3390/s8106235