Cluster-based Dynamic Energy Management for Collaborative Target Tracking in Wireless Sensor Networks

State Key Laboratory of Precision Measurement Technology and Instrument, Tsinghua University, Beijing 100084, P. R. China
*
Author to whom correspondence should be addressed.
Sensors 2007, 7(7), 1193-1215; https://doi.org/10.3390/s7071193
Submission received: 26 June 2007
/
Accepted: 12 July 2007
/
Published: 13 July 2007
(This article belongs to the Special Issue Energy Efficiency and Intelligent Signal Processing for Wireless Sensing)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:A primary criterion of wireless sensor network is energy efficiency. Focused on the energy problem of target tracking in wireless sensor networks, this paper proposes a cluster-based dynamic energy management mechanism. Target tracking problem is formulated by the multi-sensor detection model as well as energy consumption model. A distributed adaptive clustering approach is investigated to form a reasonable routing framework which has uniform cluster head distribution. Dijkstra's algorithm is utilized to obtain optimal intra-cluster routing. Target position is predicted by particle filter. The predicted target position is adopted to estimate the idle interval of sensor nodes. Hence, dynamic awakening approach is exploited to prolong sleep time of sensor nodes so that the operation energy consumption of wireless sensor network can be reduced. The sensor nodes around the target wake up on time and act as sensing candidates. With the candidate sensor nodes and predicted target position, the optimal sensor node selection is considered. Binary particle swarm optimization is proposed to minimize the total energy consumption during collaborative sensing and data reporting. Experimental results verify that the proposed clustering approach establishes a low-energy communication structure while the energy efficiency of wireless sensor networks is enhanced by cluster-based dynamic energy management.
1. Introduction
Wireless sensor networks (WSNs) consist of a large number of intelligent sensor nodes with sensing, processing and wireless communicating capabilities. These sensor nodes implement complicated tasks in the specific sensing field. Due to the strict energy constraint of sensor nodes, optimization of energy consumption is essential in all aspects of WSN. Hence, energy management has become a challenge issue. The recent interest in WSN has led to network protocols. In [1], the authors propose a new minimum spanning tree-based protocol, called power efficient data gathering and aggregation protocol (PEDAP). Its power-aware version, PEDAP-PA, is proposed too. Some other researches adopted cluster-based network architectures to enhance network scalability [2]. Focused on the target tracking problem to be discussed, observations can be fused on the cluster heads before transmitting to the end user. A typical cluster-based network protocol, low-energy adaptive clustering hierarchy (LEACH), is proposed in [3] to optimize communication energy. In LEACH, sensor nodes choose themselves as cluster heads to route data and these cluster heads change every round to balance energy consumption through network. Some improvements of LEACH have been presented. Threshold sensitive energy-efficient sensor network protocol (TEEN) and adaptive periodic threshold-sensitive energy-efficient sensor network protocol (APTEEN) are based on LEACH, both designed for time-critical applications [4]. Some researchers propose a new chain-based protocol based on LEACH. It is called power-efficient gathering in sensor information systems (PEGASIS), which minimizes the energy consumption at each sensor node [5]. However, little effort has been made for the optimal cluster head distribution, which is an important factor for the communication energy efficiency. Thus, distributed cluster heads choosing approach should be exploited to form reasonable clusters so that the cluster heads can perform more energy-efficient forwarding tasks. Based on the cluster-based network architecture, additional energy conservation could be obtained by intra-cluster multi-hop communication. For practical energy consumption modeling, we consider the dynamic power management architecture, which is presented in [6]. Moreover, target motion information can be utilized to minimize the energy consumption of sensor nodes in target tracking applications. Specially, it is essential to schedule tasks for sensor nodes during the target detection.
Considering the energy management problem of target tracking applications in WSN, we present a dynamic energy management mechanism based on dynamic adaptive clustering with intra-cluster optimal routing (DACIOR). A communication framework is defined by distributed adaptive clustering (DAC). Integrating the advantage of LEACH, the cluster head choosing approach is improved to form more uniform cluster distribution. Clustering is performed in a distributed manner and the cluster scale is adjustable. In addition, the optimal paths are obtained by Dijkstra's algorithm [7] in each cluster to reduce intra-cluster communication cost. Then, we adopt particle filter (PF) [8] to predict the target position, as PF is usually applied to estimate non-linear and non-Gaussian dynamic process. With predicted target position, sensor nodes can estimate their idle interval and go to sleep. Moreover, as candidate sensor nodes will wake up for sensing, binary particle swarm optimization (BPSO) algorithm is presented to select sensor nodes for collaborative sensing. Thereby, the total energy consumption can be optimized in WSN. In the experiments of target tracking, energy consumption of the cluster-based dynamic energy management is analyzed.
The rest of this paper is organized as follows. Section 2 formulates the energy management problem of target tracking in WSN, where the multi-sensor detection model and energy consumption model are presented. In Section 3, we propose the cluster-based dynamic energy management mechanism, where the clustering mechanism of DACIOR is exploited. Meanwhile, dynamic awakening approach and BPSO sensor node selection optimization are studied with the PF target position prediction. Section 4 provides experimental results of cluster-based dynamic energy management during the procedure of target tracking. Finally, we conclude the paper in Section 5.
2. Problem Formulation
We assume that WSN is composed of randomly deployed sensor nodes and one sink node in two-dimension sensing field. Sensor nodes work collaboratively for mobile target tracking with sensing period T , while the sink node gathers the information sensed by the sensor nodes [9,10,11]. A multi-sensor detection model will be discussed as well. Meanwhile, the sink node maintains sensor node state and routing information to take charge of energy management for the whole network. An energy consumption model of sensor nodes will be described accordingly.
2.1. Multi-sensor detection model
It is assumed that each sensor node is equipped with a bearing sensor. It can produce direction angle of the target in its sensing range Rsensing [12]. For the time instant t , we suppose that the target is located at X = (xtarget , ytarget ). Considering the inherent redundancy of WSN, the target can be detected by a number of sensor nodes at the same time. In a group of sensor nodes for detection, sensor node i which is located at (xi , yi ) will acquire the direction angle θi , where i =1, 2,…, N (N > 2) . The direction finding error of the sensor has zero-mean and Gaussian distribution. For sensor node i , the standard deviation of direction finding is σθ. Then, we have the measurement equation as follow:
where Θ = [θ1 θ2 … θN]T , H(X) = [h1(X) h2(X) … hN (X) ]T is the observation function, W is direction finding error matrix, and Norm is the normal distribution function. In addition, hi(X) = tan−1(ytarget − yi)/(xtarget − xi),
.
Then, the likelihood function of the target position X is calculated as:
To estimate the target position, we should extract the information from the data set Θ. A suitable measure for the information contained in Θ can be derived from the Fisher information matrix (FIM) [13]. The FIM for target detection is calculated as:
where E means the expected value. According to Equation (2), we have:
where Δxi = xtarget − xi , Δyi = ytarget − yi, ri is the Euclidean distance between the target and sensor node i. If all the sensor nodes have the same standard deviation of direction finding σθ, then FIM for target detection is simplified as:
J−1 is the estimation error covariance matrix, which defines the Cramer-Rao lower bound (CRLB) of target localization error. Its associated quadratic form depicts an error ellipse in two-dimension case.
The sink node will gather the direction finding data from the sensor nodes and acquire the multi-sensor detection results by maximum likelihood estimation. Thereby, the collaborative sensing of sensor nodes is accomplished and the sensing accuracy is based on the error ellipse.
2.2. Energy consumption model
Assume that each sensor node consists of sensing, processing, memory and communication components. With multiple power modes, these modules can support different levels of power consumption and functionality. Accordingly, each sensor node can have a set of sleep states based on various combinations of module power states. Each sleep state sk has power consumption ψk . The transition time from state si to state sj is denoted by τi,j , where i and j are state indices. The power consumption between the sleep states is modeled as a linear ramp.
Here, four different sleep states {s0, s1, s2, s3} of sensor nodes are defined. The transition time matrix C ={τi,j ∣( i, j = 0,1,2,3} is assumed as:
where the unit is ms, τi,i = 0, and τi,j = τj,i.
The description of the sleep states is as follow:
- (a)
- State s0All the components of sensor node are active. Data acquisition, reception and transmission are enabled. Sensor nodes can accomplish target detection and data forwarding tasks in this state. Assume that the power consumption in state s0 is 42 mW+ψTx , where the extra power consumption for data transmission is denoted by ψTx . The propagation distance between sensor nodes i and j can be denoted as di,j . Then transmission cost between the sensor nodes is calculated as ψTx =α1r+α2di,j2r, where r denotes the data rate, α1 denotes the electronics energy expended in transmitting one bit of data, and α2 > 0 is a constant related to the radio energy [14].
- (b)
- State s1Compared to state s0, the data transmission is disabled in state s1 . Sensor node can receive orders from the sink node in this state. Assume the power consumption ψ1 = 42 mW.
- (c)
- State s2In this state, only the sensing component is active. It is the transitional state to deeper sleep state. Assume the power consumption ψ2 = 22 mW.
- (d)
- State s3This is the deepest sleep state, which consumes the lowest power ψ3 = 2 mW. The sensing, processing, memory and communication components are inactive in this state. Sensor nodes in this state can only be wakened by its own timer.
Besides, we assume that the extra compression cost is 5nJ/bit/message in the cluster-base WSN to be discussed. These energy consumption amounts correspond to typical values.
3. Cluster-based Dynamic Energy Management
In a large scale WSN, direct transmission from data source to sink node should be avoided due to the large energy depletion. Cluster-based network structure is encouraged to enhance the network scalability and reduce energy consumption. We exploit a new clustering mechanism for cluster head choosing and intra-cluster routing. Also, we study dynamic energy management of target tracking application under this communication framework. Target position is predicted for dynamic network awakening and sensor node selection optimization.
3.1. Distributed adaptive clustering with intra-cluster optimal routing
Clustering mechanism of WSN has been studied in [5], where LEACH is proposed to reduce and balance the energy consumption of sensor nodes. In LEACH, cluster heads are chosen in each round based on a percentage Ph of total sensor node number. Each sensor node i generates a random number in the interval [0,1] . If this number is less than a threshold Th(i) , the sensor node becomes a cluster head for the current round. The threshold is set as:
where Mod is the modulus operation, rC is the current round number, and G is the set of sensor nodes which have not been cluster heads in the last 1/ Ph rounds. Cluster heads send their announcement with the same power, and then each sensor node can join the cluster with the closest cluster head according to the received signal strength. During each round, cluster heads collect the data of their cluster members. In this way, cluster head can perform data compression and report the result to the sink node. Each sensor node can take its turn to be a cluster-head every 1/Ph rounds. However, as cluster heads are randomly chosen, energy efficiency of their distribution can not be guaranteed in each round.
To form a reasonable cluster head distribution, we present an approach of DAC to choose cluster heads. It is assumed that the communication range of each sensor node is adjustable. During round r , cluster heads can be decided in a distributed manner with following 4 steps.
- Step 1:
- Each sensor node i generates a number ai:where Rand(1) denotes a random number in [0,1] , AC (1) = Ø. If the set of cluster heads in round rC is BC(rC), thenIf AC (rC) = I, then AC (rC + 1) = Ø.
- Step 2:
- Sensor nodes broadcast their number with the same communication range Rh. After receiving the numbers from the neighboring sensor nodes {ak}, each sensor node i set Flaghead(i) as:If Flaghead (i) =1, the sensor node i is regarded as a cluster head.
- Step 3:
- Existing cluster heads send their announcement with range Rh . For sensor node j, if it can receive the announcement, set Flagmember (j) =1; otherwise, set Flagmember (j) = 0.
- Step 4:
- If the condition that Flaghead (k) =1 or Flagmember (k) =1 is satisfied for all the sensor nodes, then stop this process and form the clusters as LEACH does; otherwise, the set of sensor nodes which have not satisfied the condition continue to execute Step 2.
Eventually, we can find that the distance between any two cluster heads is larger than Rh. Meanwhile, there are at least one cluster head within the range Rh for each sensor node. In this way, the cluster head distribution can be more uniform so that cluster heads can provide more energy-efficient data forwarding service for the whole network.
Moreover, as multi-hop communication still has potential to save intra-cluster communication energy consumption, we propose DACIOR with additional optimal path search in each cluster. Since data of all cluster members should be transmitted to their cluster head, Dijkstra's algorithm is utilized here which can find the shortest paths from a single destination node to all the other nodes [15]. Considering only the transmission energy of WSN, the problem of each cluster is defined as:
- (a)
- Cluster head, considered as the destination node, is denoted by p0 and the set of cluster members is denoted by P ={p1, p2,…, pn};
- (b)
- According to Section 2.2, the edge weight between pi and pj is:
- (c)
- Variable Di represents estimate of the lowest cost from pi to p0. It converges to the real value after iterations;
- (d)
- The set of cluster members that find the lowest cost paths is denoted by Q.
Searching procedure for optimal routing in WSN is described as follow.
- (i)
- Initialize the network:
- (ii)
- Search for the next sensor node with the lowest cost path to p0 . For pi ∉ Q , if Di satisfies:the lowest cost path of pi is found, update Q:If Q = P , then search is completed; otherwise, continue searching.
- (iii)
- Update Dj for all pj ∉ Q according to the result of step (ii):Continue to execute step (ii).
Iterate step (ii) and (iii) until the lowest cost paths of all cluster members are found.
With the knowledge of all the clusters, the sink node performs the intra-cluster path search and maintains the routing information.
3.2. Dynamic awakening mechanism
In target tracking application, we discuss vehicle target which moves randomly with the maximum speed vmax and the maximum acceleration amax [16]. As the sink node can obtain the collaborative sensing result of target positions, the PF algorithm is performed on the sink node to predict the target position in the next sensing instant. PF is a sequential importance sampling method which bases on Monte Carlo simulation and Bayesian sampling estimation theories. It evolves from Bootstrap nonlinear filtering algorithm [17]. The pseudo-code of PF is outlined as follow:
- (a)
- InitializationGenerate the particle set according to the target position probability distribution p(X (0)):where X (k) is the target position estimation in the k - th sensing instant. Accordingly, Xi (k) = [xi (k), yi (k) ]T is the target position estimation for particle i. In addition, Ns is the number of particles. Then, the importance weight of particle i is set as:
- (b)
- IterationsSample each particle as:where F is the process noise. The target velocity is estimated according to the displacement, while the target acceleration is estimated according to the displacement increment. Then, evaluate the importance weights up to a normalizing constant and then normalize importance weights.
Resampling needs to be performed when the variance of the importance weights becomes excessive. The effective sample size is defined as
where Var is the variance function. When Neff drops below a threshold Nth, resample Ns samples approximately distributed according to p(Xi (k) ∣ Z(k)) and set importance weight of particle i as:
where Z(k) is the observation of target position.
Thus, the state of target position is updated as:
In each sensing instant, the sink node can obtain a prior state of target position for the next sensing instant.
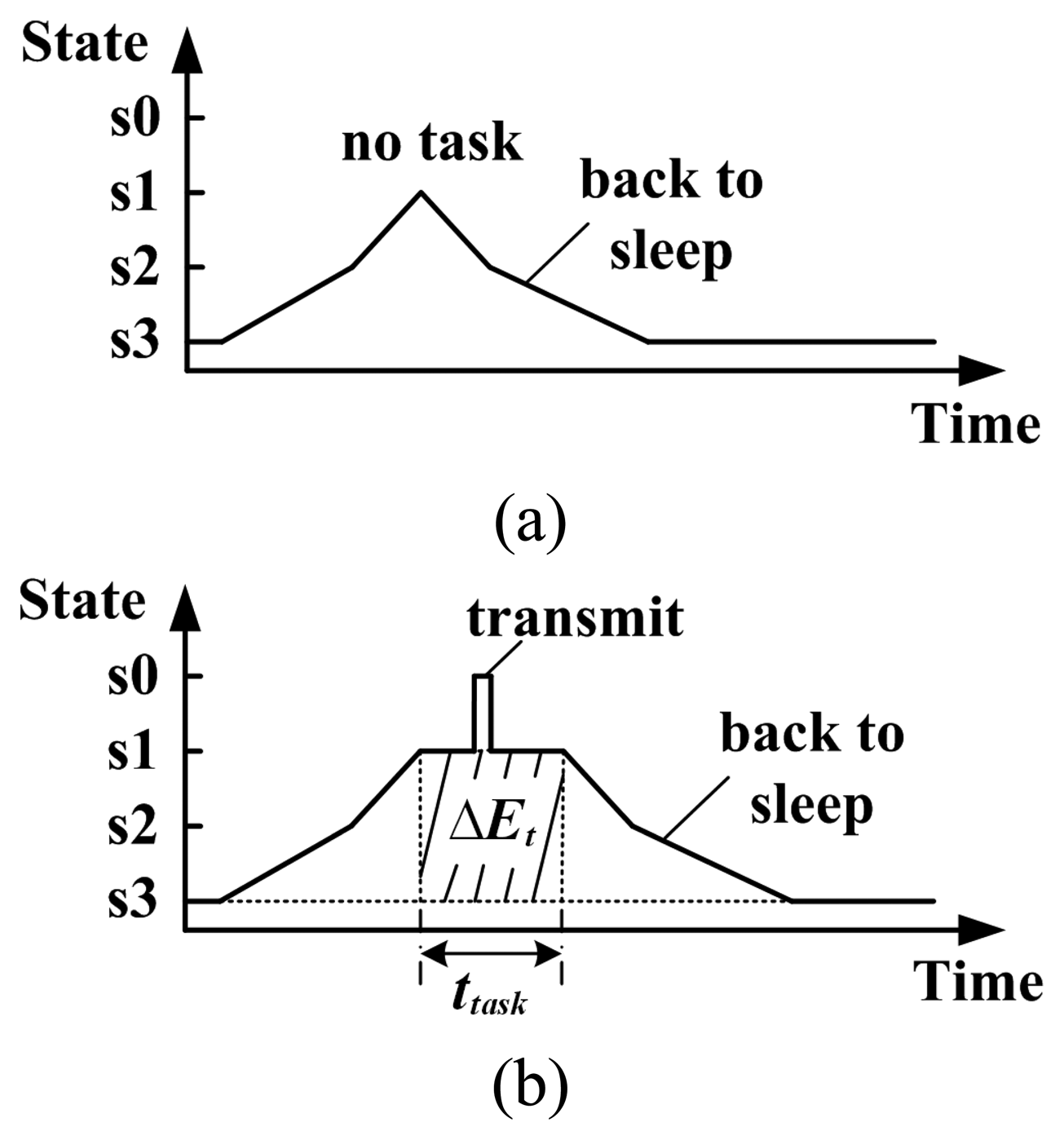
With the target position predicted by PF, we present a dynamic awakening mechanism. As shown in Figure 1, sensor nodes are sent to state s3 for energy saving while the ones which have potential sensing or transmission task wake up to state s1 by their own timer. The sink node can estimate the idle period number nidle of each sensor node, while sensor nodes in state s1 can receive the scheduling from it. When there is no task (sensor node i ), sensor nodes will go back to sleep directly after set the next sleeping interval. When there is a sensing (sensor node j ) or forwarding (sensor node k ) task, sensor nodes will implement the task, set the next sleeping interval and turns to sleep.
As mentioned in Section 3.1, multi-hop communication is used to reduce transmission energy consumption. However, activity of sensor nodes which support data forwarding leads to another part of cost. The extra energy is marked in Figure 1 and denoted by ΔEf. Then, we can add this part of energy into Equation (11) to minimize the total energy consumption during the optimal path search:
where Ttx is the data transmission time and r is the data rate.
With the communication structure of WSN, the idle period number of each sensor node can be estimated in the following way.
First, WSN should keep standby for any new target getting into it. Each sensor node can estimate the minimum time for new target getting into the sensing range as tmin = (dmin − Rsensing )/ vmax, where dmin is the shortest distance from the sensor node to the WSN boundary. For the possible target position at the next sensing instant, the neighboring sensor nodes should be sent to state s1 for their potential sensing task. Accordingly to the sensing period T, the idle time of sensor node is
. Second, once a target enters the sensing field, the sink node can obtain the predicted current target position (xtarget, ytarget) . Then each sensor nodes that wakes up to state s1 can get the estimated idle time
, where dtarget,i is the distance between the target and sensor node i.
As stated above, we can calculate the idle time as:
In addition, the sensor nodes that have forwarding task should wake up on time. For sensor node i □if it has the responsibility of transmitting data for a set of sensor nodes {k}, where k denotes the index of sensor node. Then its idle time can be updated as:
Finally, the number of idle periods is:
where Floor is the rounding operation. nidle is employed to schedule the state transition of sensor nodes. The sleep time of sensor nodes is prolonged as much as possible without loss any event. Besides, the multi-hop communication is guaranteed.
3.3. Sensor node selection optimization
As sensor nodes transfer data to achieve collaborative sensing, an efficient approach should be exploited to optimize communication energy consumption with predicted target position and sensor node sleep state.
With the dynamic awakening mechanism, sensor nodes in the vicinity of target become candidates for detection. Assume that there are m candidate sensor nodes. The optimization problem is to select a group of sensor nodes from the candidate sensor nodes for total energy consumption conservation. This kind of combinatorial optimization problem is often solved by probabilistic heuristic algorithms, such as genetic algorithms (GA) [18]. However, there are some deficiencies in GA performance. For example, when the parameters to be optimized are highly correlated in some problems, the crossover and mutation operations can not ensure that the fitness of offspring is better. Moreover, the premature convergence of GA degrades its performance and reduces its search capability.
Kennedy et al. developed particle swarm optimization (PSO) through the simulation of a simplified social system of bird and fish. PSO is an efficient optimization tool for solving combinatorial optimization and dynamic optimization problems in multi-dimension space. It can obtain high-quality solutions with stable convergence characteristic, requiring only a concise program code [19]. Here, we utilize a discrete binary particle swarm optimization (BPSO) to solve the sensor node selection problem.
The dimension of search space is m. Assume the population of particles is Np. For the particle i,
represents current position. Binary coding scheme is used. If the sensor node j of the m candidate sensor nodes is used for sensing, then
; otherwise,
. Besides,
represents the current velocity and
represents the best position achieved so far for the particle i.
Taking semimajor axis of error ellipse as the metric of collaborative sensing error, we assume that sensing error should be less than A0 in the target tracking application.
Figure 2 compares the power curves of sensor nodes with and without sensing task. The extra operation energy to accomplish task is denoted by ΔEt while the execution time of task is denoted by ttask. For each solution, we denote the sensor node number selected to implement task as nt. According to Section 2.2 and 3.2, the energy metric is defined for the total energy consumption minimization:
where M denote the set of sensor node pairs between which data should be transmitted.
Since purpose of the optimization is sensing accuracy and energy conservation in the target tracking application, the minimization objective function f (Xp) for potential solution Xp is defined as:
where A is defined as accuracy metric of the collaborative sensing error, E0 is the upper bound of energy consumption metric Em , and ρ is a constant to balance the value of two metrics. Minimizing the fitness function, the sensing accuracy is optimized first to guarantee the sensing error threshold A0 , and then the energy metric is optimized for the energy efficiency of WSN.
The best position of the i-th particle can be calculated as:
where k is the iteration number.
The overall best position of particle swarm is calculated as:
Velocity and position of particle are updated according to Equation (30), (31) and (32) [20]:
where c1 and c2 are acceleration constants, representing the weight of the stochastic acceleration terms that pull each particle toward the local best position and global best position respectively. r0, r1 and r2 are random numbers in interval (0,1]. η(k) is the inertia weight for balancing the global and local search ability. A large inertia weight facilitates a global search while a small inertia weight facilitates a local search. See Equation (33), the inertia weight linearly decreases during the iterations. Accordingly, the optimization process can converge to the neighborhood of the global optimal solution smoothly at the prophase, and converge to the global optimal solution quickly at the anaphase [21].
4. Experimental Results
In this section, we will analyze the efficiency of cluster-based dynamic energy management mechanism with simulation experiments.
4.1. Experiment environment
Assume that the sensing field of WSN is 400 m × 400 m, in which there are 256 sensor nodes deployed randomly. Each sensor node is equipped by peroelectric infra-red (PIR) sensors with sensing range Rsensing = 60 m . For each sensor, the standard deviation of DF is σθ = 1°. In the energy consumption model, we set parameters α1 = 50 nJ/b, α2 = 100 pJ/(b· m2).
For target tracking, the sensing period T is set as 0.5 s and the execution time of task is set as ttask = 0.005 s. The data packet size is 2 KB. The optimization time of sensor node selection is set as 0.1 s and the parameter ρ = 105. For the vehicle target, the maximum acceleration amax =6 m/s2 and the maximum velocity vmax =30 m/s. The sensing error threshold A0 =0.5 m. Simulations of target tracking are performed using Opnet Modeler, which is a simulation platform for distribution communication system. Network models are established based on the dynamic energy management mechanism. The wireless channel model is bpsk, and the data rate is 11 Mbps.
4.2. Simulations of cluster-based dynamic energy management
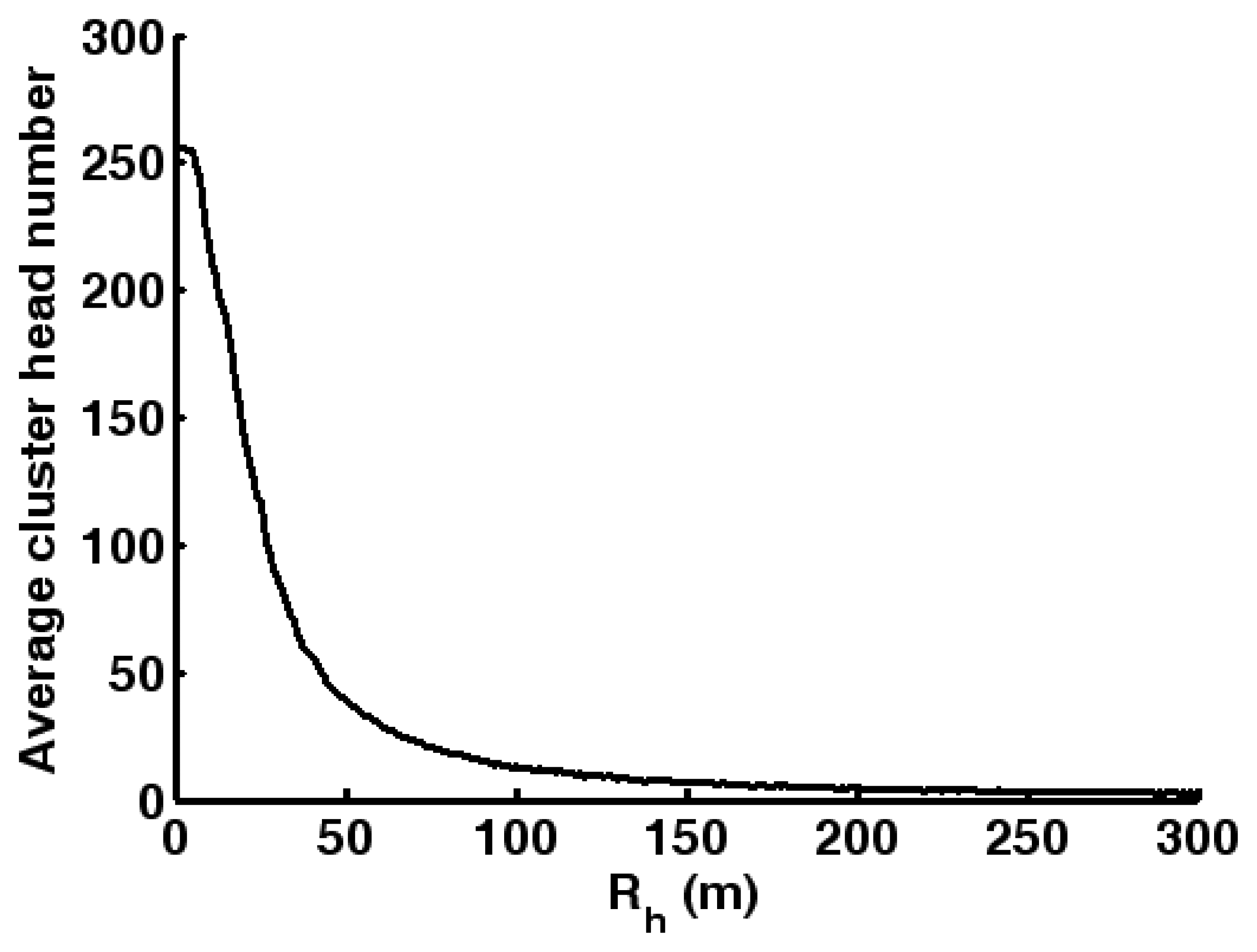
The cluster head choosing of DAC is discussed initially. As shown in Figure 3, the average cluster head number is presented using different clustering communication range Rh. The average cluster head number monotonically decreases as Rh increases so that we can control the cluster head number by adjusting communication range during clustering.
Then, we compare energy efficiency of LEACH, DAC and DACIOR. In this case, each sensor node is set to transfer the same amount of packets to the sink node. Only energy consumption of data communication and compression is taken into account. Two other communication approach, direct transmission and lowest cost path, are discussed. Sensor nodes transmit their data directly to the sink node in direct transmission, while the optimal multi-hop routing from sensor nodes to the sink node is used in lowest cost path approach. Figure 4(a) shows that LEACH has the best performance when cluster head percentage Ph =10% . In Figure 4(b), DAC and DACIOR have their best performance when Rh = 82 m and 100 m respectively. It can be seen that DAC and DACIOR have great potential to performance better than LEACH in global data acquisition (DAQ).
Moreover, the number of sensor nodes which expends more energy than 3J during global DAQ is presented in Figure 5. Here, the approaches of lowest cost path, LEACH, DAC and DACIOR are compared with their best cluster head settings. The total energy of sensor node is assumed to be 3J. Sensor nodes will die out soon at the beginning of application due to uniform energy consumption distribution. Thus, DACIOR have the most uniform energy consumption among sensor nodes.
Energy consumption of these communication approaches during target tracking is studied. The target moves randomly in the sensing field for 300 s and every sensor node in its vicinity will send packets. For LEACH and DACIOR, the parameters Ph and Rh are adjusted. 20 tracking procedures are simulated and cluster heads change every procedure. The average energy consumption of the 20 tracking procedures is shown in Figure 6. It can be seen that the performance of cluster-based approaches is degraded in target tracking. That is because there is not as much data as that in global DAQ for fusion, which contributes much to energy saving. Even in the best case of LEACH (Ph =10%) energy consumption is larger than the approach of lowest cost path, while DACIOR still have better performance in its best case (Rh =100 m).
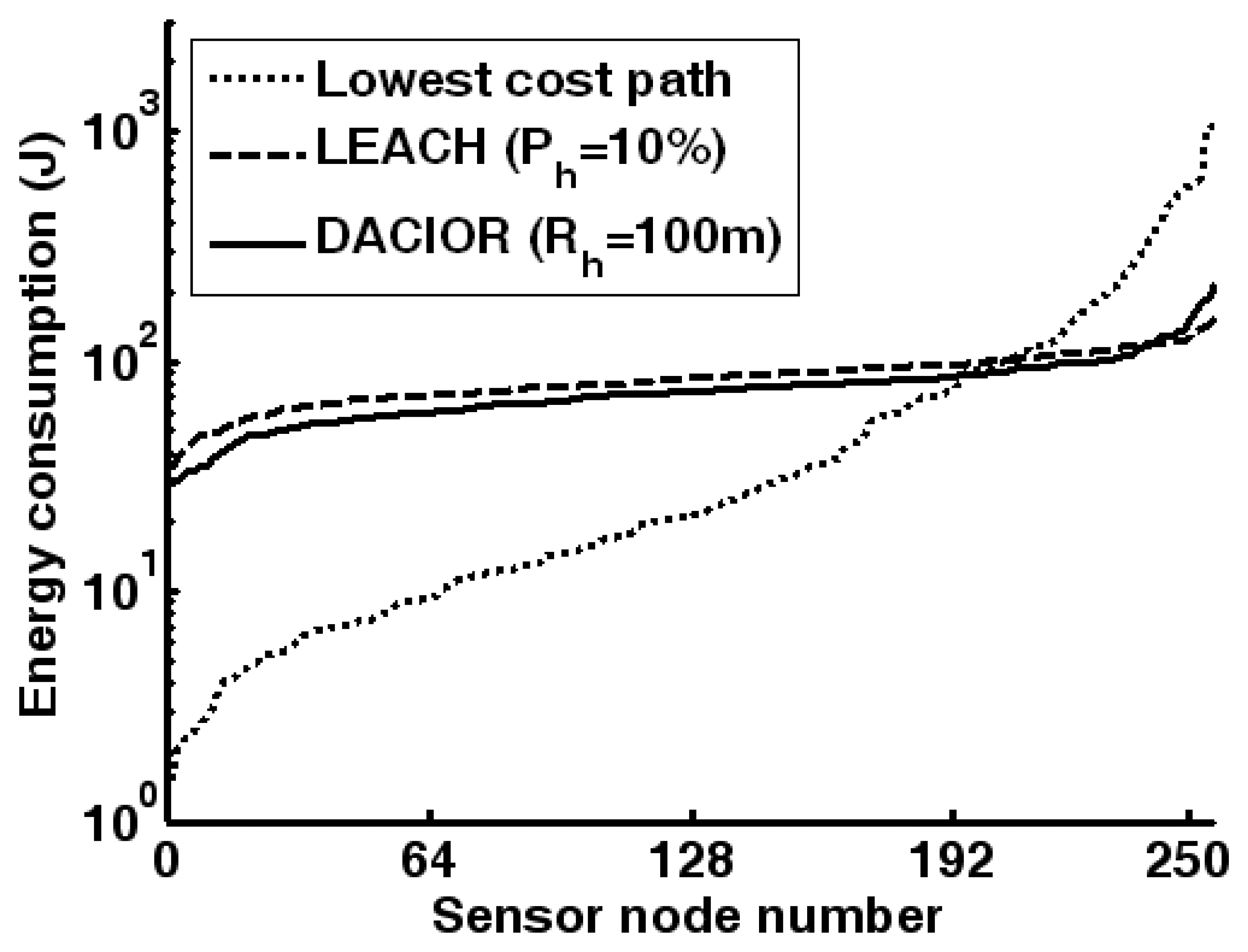
However, Figure 7 presents the energy consumption of each sensor node, which is presented from small to large. It shows that LEACH and DACIOR has much more uniform energy consumption over sensor nodes during target tracking. Here, Ph =10% in LEACH while Rh =100 m in DACIOR. Compared with LEACH, DACIOR achieves an overall energy saving through the network.
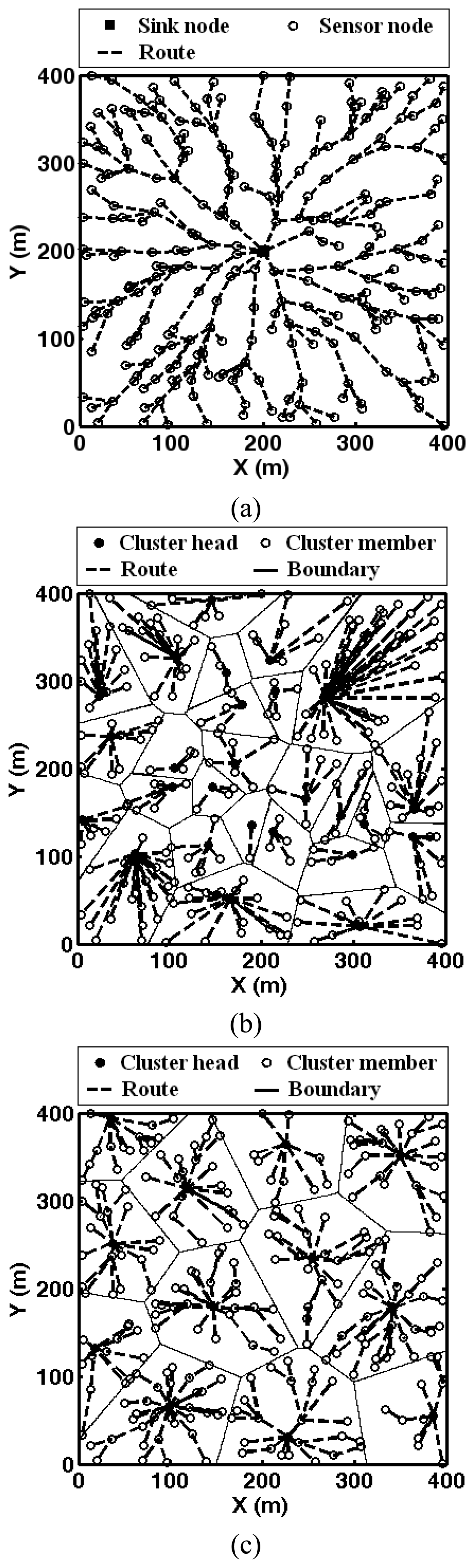
Then we will study the energy efficiency of dynamic energy management mechanism. Scenarios of routing for lowest cost path, LEACH and DACIOR are shown in Figure 8. The optimal paths in Figure 8(a) and (c) are found according to Equation (22). The cluster heads of LEACH are generated with Ph =10%, while DACIOR sets Rh =100 m . The target trajectory is generated as shown in Figure 9(a). For the target trajectory, the start point is (0,0) and the target moves for 60 s. The target is designed to move at its maximum velocity and accelerate in some parts of the trajectory. Also, the trajectory involves different moving situations. Therefore, this scenario can represent the generalization of the target tracking problem. PF is adopted to predict the target position, where the particle number Ns is set as 200. Figure 9(b) shows the prediction error which is constrained in [0,1] . With the predicted target position, dynamic awakening mechanism can be implemented then.
We take the time interval from 10s to 50s of the target motion for discussion. With all the sensor nodes in the target vicinity sending packets, the total energy consumption with lowest cost path, LEACH and DACIOR is shown in Figure 10. We can see that DACIOR achieves lower energy consumption than LEACH, while the approach of lowest cost path consumes the highest energy. Considering sensor node selection, optimization results of BPSO is presented in Figure 11, where the particle number Np is set as 40 and the iteration number BPSO_ITER is set as 20. It can be seen in Figure 11(a) that much less sensor node is used to accomplish the target tracking task. Also, Figure 11(b) shows that the collaborative sensing error with the selected sensor nodes does not exceed the given sensing error threshold A0. Hence, the target tracking accuracy can be satisfied.
Moreover, we compare the optimization performance of GA and BPSO. Here, the same coding scheme for solution is used in GA, of which the solution population is also set as 40. One single simulation of sensor node selection is given, as shown in Figure 12. The premature convergence injures the performance of GA, while BPSO can acquire a solution with lower energy metric.
Finally, the simulation of target tracking is implemented with the sensor nodes selected by BPSO. Figure 13 shows the total energy consumption during the target tracking procedure. WSN spends 41.00J for target tracking without sensor node selection, but only 33.03J is spent for the same task with BPSO sensor node selection, where energy conservation of 19.44% is obtained.
From the experiments, the cluster-based dynamic energy management is implemented in specified applications. Under the communication framework formed by DACIOR, the energy consumption of target tracking is evaluated. The dynamic awakening approach and sensor node selection implements notable energy conservation.
5. Conclusions
Focusing on the energy efficiency problem in target tracking problem of WSN, this paper proposed a cluster-based dynamic energy management mechanism. The presented approach of DACIOR establishes routing framework of WSN, where Dijkstra's algorithm is adopted to search intra-cluster optimal routing. Then PF is applied to predict the target position, which is used to estimate the idle interval of each sensor node according to its sensing and transmission task. Therefore, sensor nodes are sent to sleep and also became candidates for sensing on time. Meanwhile, we accomplish the sensor node selection optimization with BPSO so that total energy consumption can be minimized without degrading the accuracy performance. Simulations of target tracking demonstrate that the communication framework formed by DACIOR leads to more uniform energy consumption over the whole network. Moreover, the proposed dynamic energy management mechanism enhances energy efficiency of WSN. This paper presents a low-energy clustering network structure for dynamic energy management in WSN. Our future work will involve more robust prediction algorithm and more energy-efficient awakening approach.
Acknowledgments
This paper is supported by the National Grand Fundamental Research 973 Program of China under Grant No.2006CB303000 and National Natural Science Foundation of China (No.60673176; No.60373014; No.50175056).
References and Notes
- Tan, H.O.; Korpeoglu, I. Power efficient data gathering and aggregation in wireless sensor networks. Proceedings of ACM International Conference on Management of Data; 2003; 32, pp. 66–71. [Google Scholar]
- Younis, O.; Krunz, M.; Ramasubramanian, S. Node clustering in wireless sensor networks: recent developments and deployment challenges. IEEE Network. 2006, 20, 20–25. [Google Scholar]
- Heinzelman, W.R.; Chandrakasan, A. Energy-efficient communication protocol for wireless microsensor networks. Proceedings of International Conference on System Sciences; 2000; pp. 1–10. [Google Scholar]
- Anjeshwar, A.M.; Agrawal, D.P. TEEN: A routing protocol for enhanced efficiency in wireless sensor networks. Proceedings of Parallel and Distributed Processing Symposium; 2001; pp. 2009–2015. [Google Scholar]
- Lindsey, S.; Raghavendra, C.; Sivalingam, K.M. Data gathering algorithms in sensor networks using energy metrics. IEEE Transactions on Parallel and Distributed Systems. 2002, 13, 924–935. [Google Scholar]
- Sinha, A.; Chandrakasan, A. Dynamic Power Management in Wireless Sensor Networks. IEEE Design & Test of Computers. 2001, 18, 62–74. [Google Scholar]
- Sudhakar, T.D. Supply restoration in distribution networks using Dijkstra's algorithm. Proceedings of IEEE International Conference on Power System Technology; 2004; 1, pp. 640–645. [Google Scholar]
- Wang, X.; Wang, S.; Ma, J. An improved particle filter for target tracking in sensor system. Sensors. 2007, 7, 144–156. [Google Scholar]
- Hu, F.; Cao, X.; May, C. Optimized scheduling for data aggregation in wireless sensor networks. Proceedings of IEEE International Conference on Networking, Sensing and Control; 2005; 2, pp. 557–561. [Google Scholar]
- Wang, X.; Wang, S.; Ma, J. Dynamic deployment optimization in wireless sensor networks. Lecture Notes in Control and Information Sciences. 2006, 344, 182–187. [Google Scholar]
- Wang, X.; Jiang, A.; Wang, S. Mobile agent based wireless sensor network for intelligent maintenance. Lecture Notes in Computer Science. 2005, 3645, 316–325. [Google Scholar]
- Zhao, F.; Shin, J. Information-driven dynamic sensor collaboration for tracking applications. IEEE Signal Processing Magazine. 2002, 19, 61–72. [Google Scholar]
- Oshman, Y.; Davidson, P. Optimization of observer trajectories for bearings-only target localization. IEEE Transactions on Aerospace and Electronic Systems. 1999, 35, 892–902. [Google Scholar]
- Chhetri, A.S.; Morrell, D. Energy efficient target tracking in a sensor network using non-myopic sensor scheduling. Proceedings of International Conference on Information Fusion; 2005; pp. 558–565. [Google Scholar]
- Sobrinho, J.L. Algebra and algorithms for QoS path computation and hop-by-hop routing in the Internet. IEEE/ACM Transactions on Networking. 2002, 10, 541–550. [Google Scholar]
- Yang, L.; Feng, C. Adaptive tracking in distributed wireless sensor networks. Proceedings of IEEE International Symposium and Workshop on Engineering of Computer Based Systems; 2006; pp. 103–111. [Google Scholar]
- Yu, Y.; Cheng, Q. Particle filters for maneuvering target tracking problem. Signal Processing. 2006, 80, 195–203. [Google Scholar]
- Jourdan, D.B.; Weck, O.L. Layout optimization for a wireless sensor network using a multi-objective genetic algorithm. Proceedings of IEEE Vehicular Technology Conference; 2004; 5, pp. 2466–2470. [Google Scholar]
- Ting, T.O. A novel approach for unit commitment problem via an effective hybrid particle swarm optimization. IEEE Transactions on Power Systems. 2006, 21, 411–418. [Google Scholar]
- Jin, X.; Zhao, J.; Sun, Y. Distribution network reconfiguration for load balancing using binary particle swarm optimization. Proceedings of International conference on Power System Technology; 2004; pp. 507–510. [Google Scholar]
- Shi, Y.; Eberhart, R.C. Fuzzy adaptive particle swarm optimization. Proceedings of Congress on Evolutionary Computation; 1999; pp. 1945–1950. [Google Scholar]
Figure 1.
State transition of different sensor nodes with dynamic awakening mechanism.
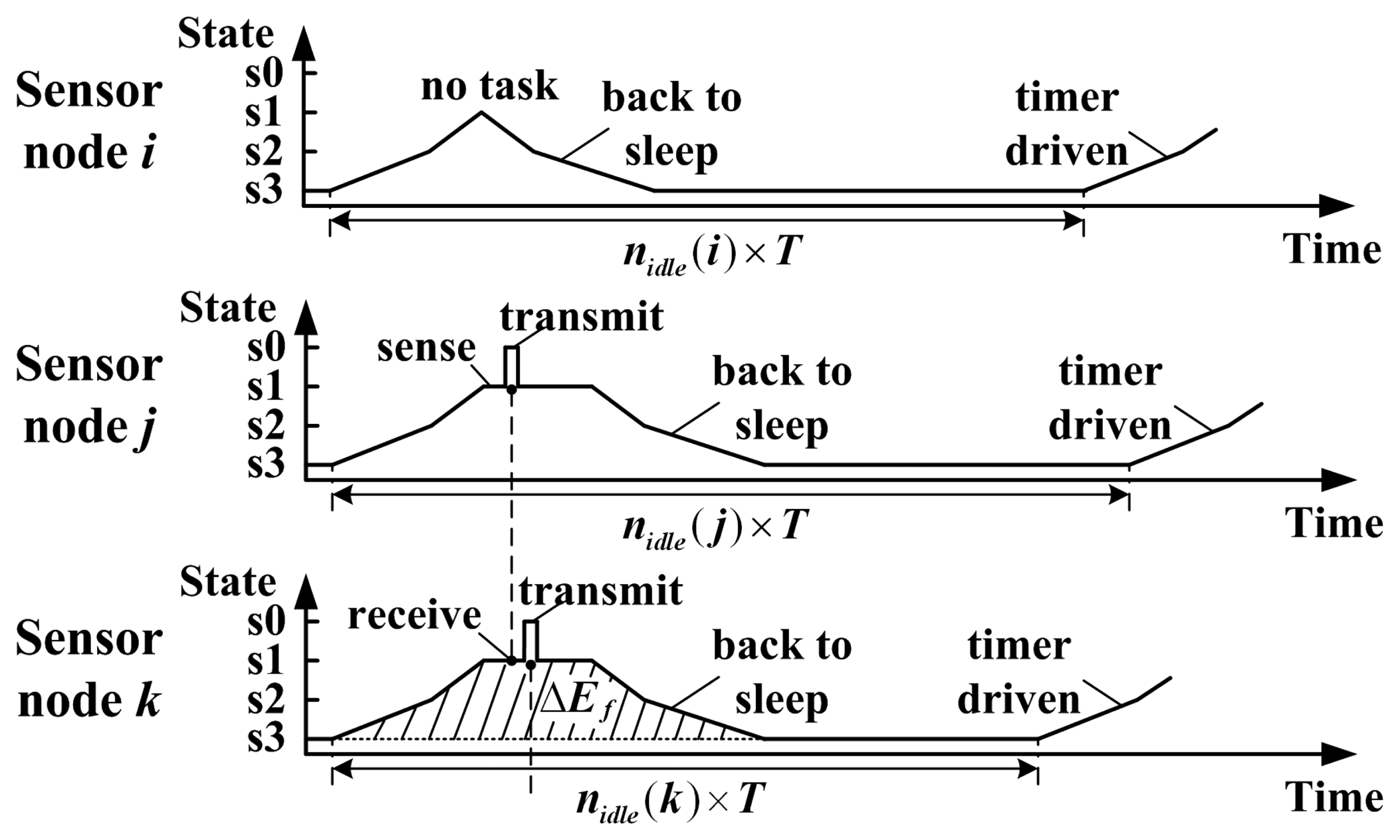
Figure 2.
Power curves of sensor node (a) which is not selected to implement task and (b) which is selected to implement task.
Figure 2.
Power curves of sensor node (a) which is not selected to implement task and (b) which is selected to implement task.
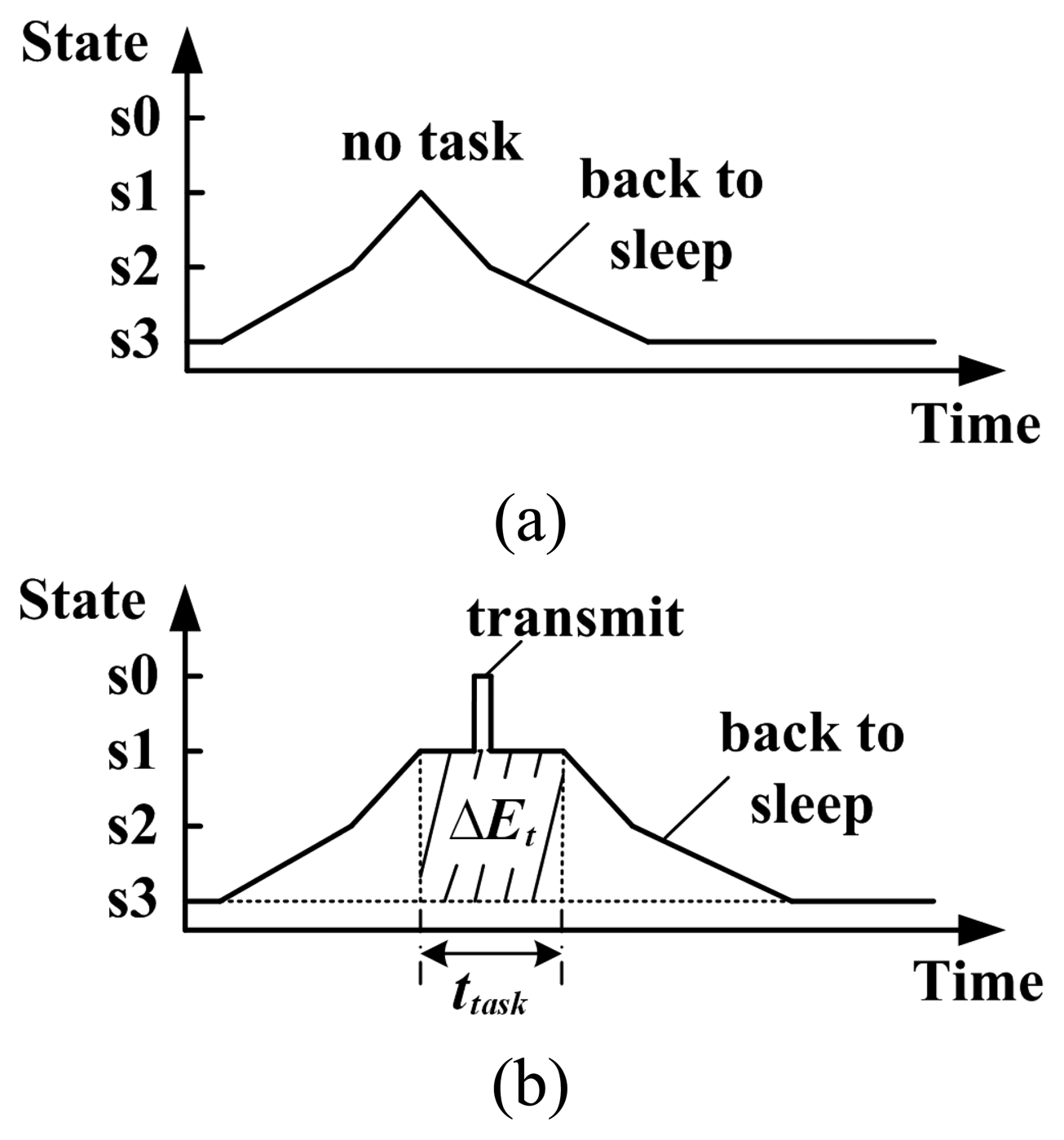
Figure 3.
Average cluster head number obtained by DAC with different Rh.
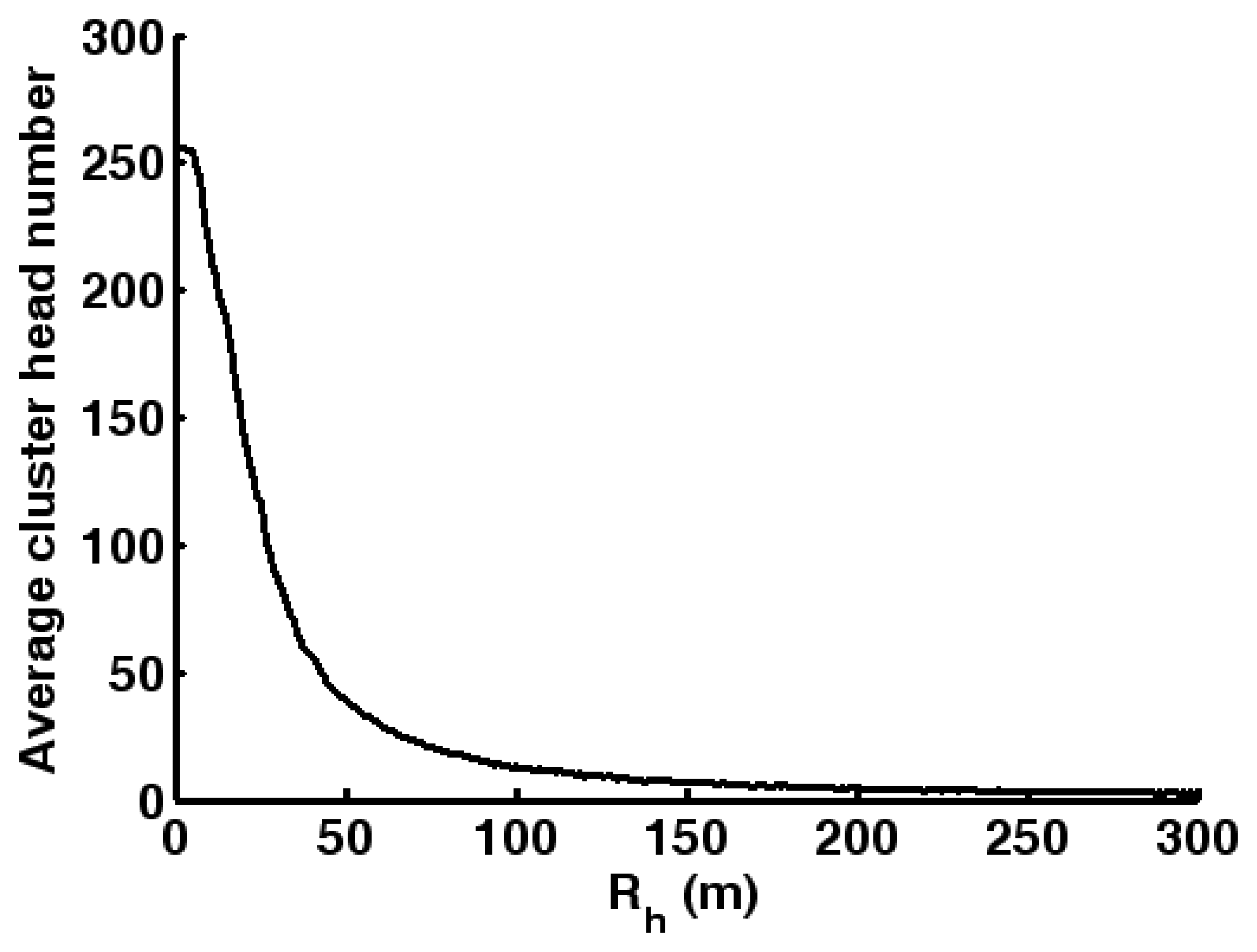
Figure 4.
Energy efficiency comparison in global DAQ with different cluster head settings: (a) LEACH; (b) DAC and DACIOR.
Figure 4.
Energy efficiency comparison in global DAQ with different cluster head settings: (a) LEACH; (b) DAC and DACIOR.
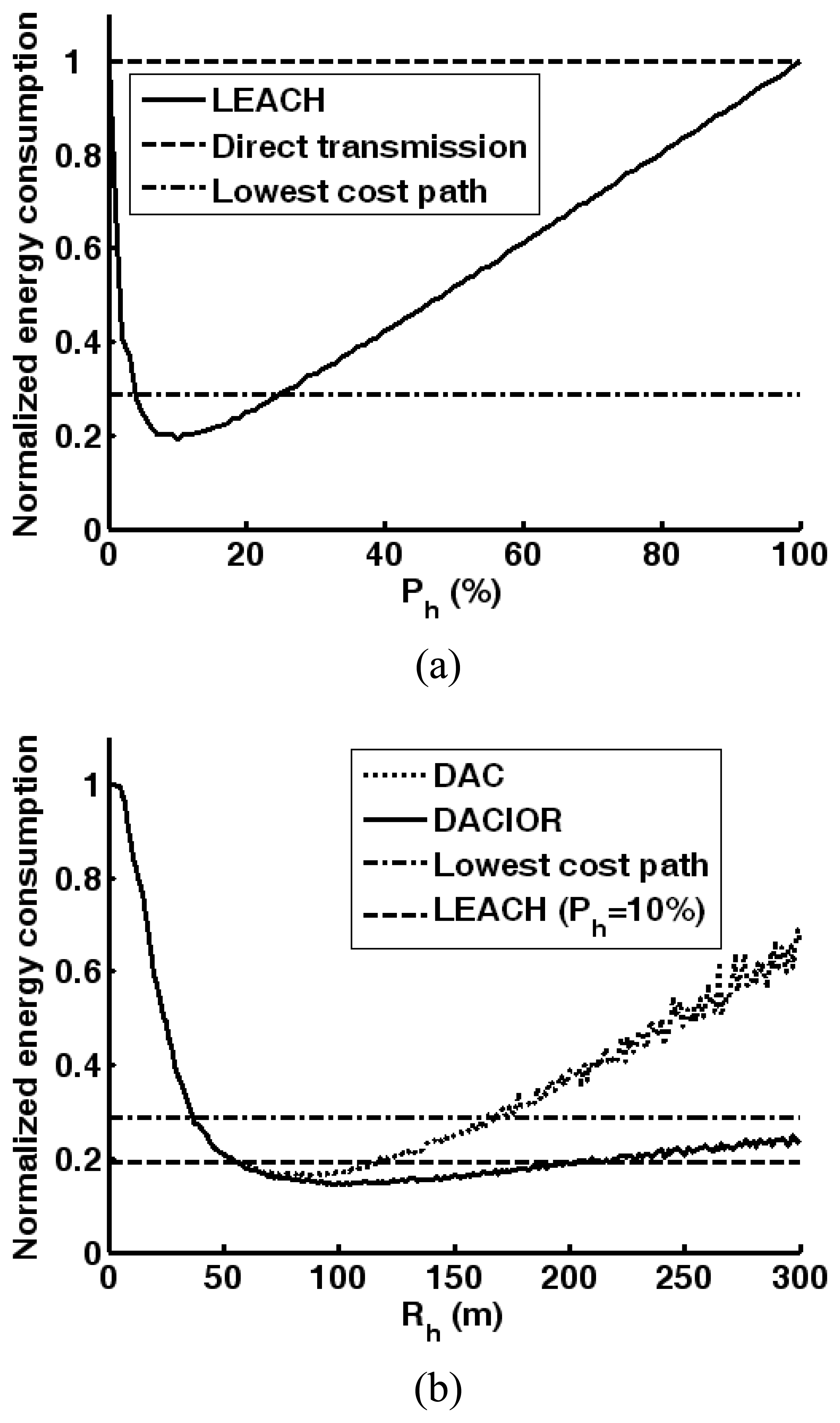
Figure 5.
Number of sensor nodes which expend more energy than 3J during global DAQ with lowest cost path, LEACH, DAC and DACIOR.
Figure 5.
Number of sensor nodes which expend more energy than 3J during global DAQ with lowest cost path, LEACH, DAC and DACIOR.
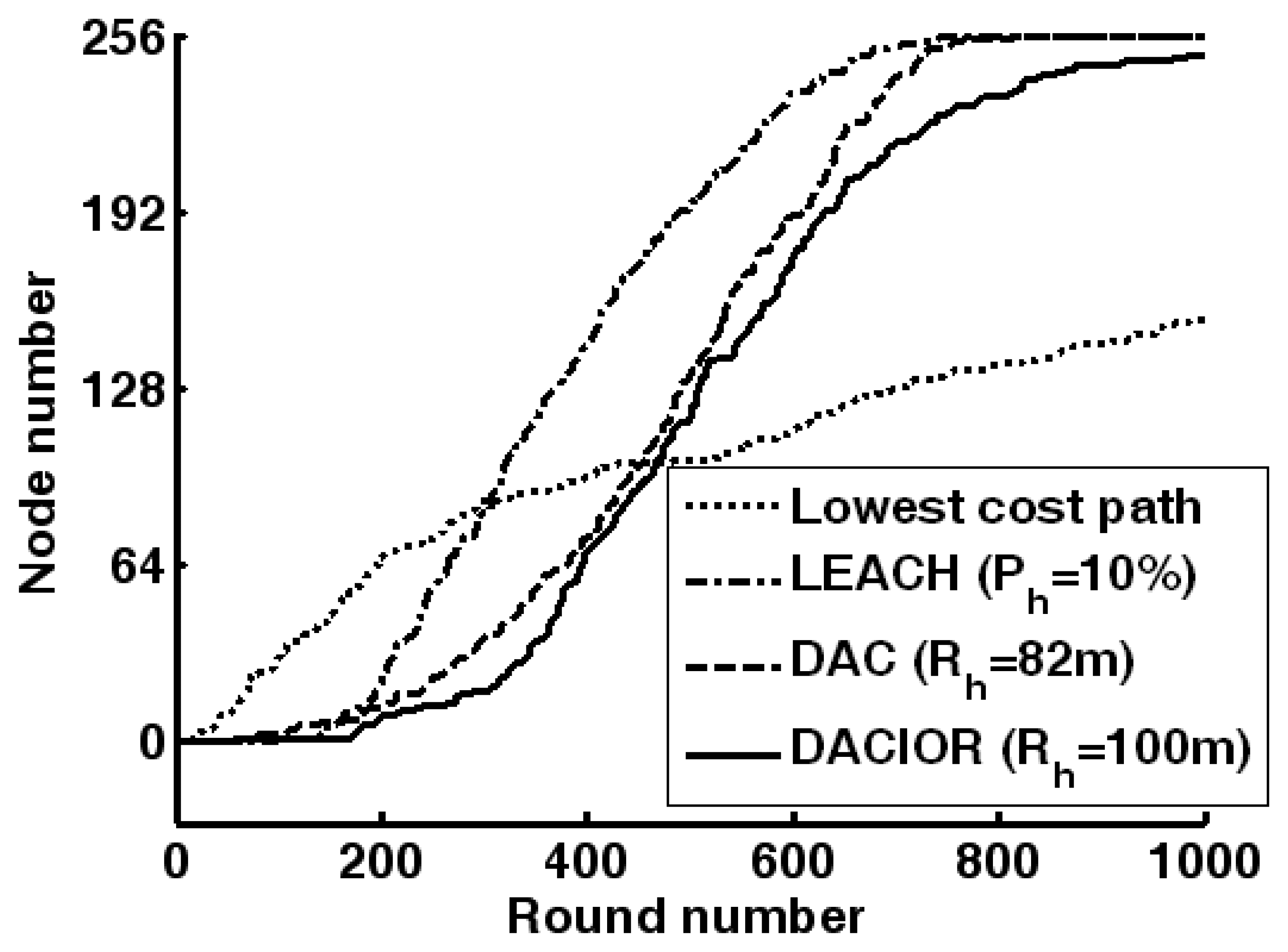
Figure 6.
Energy consumption during global DAQ and target tracking: (a) Comparison of lowest cost path and LEACH; (b) Comparison of lowest cost path and DACIOR.
Figure 6.
Energy consumption during global DAQ and target tracking: (a) Comparison of lowest cost path and LEACH; (b) Comparison of lowest cost path and DACIOR.
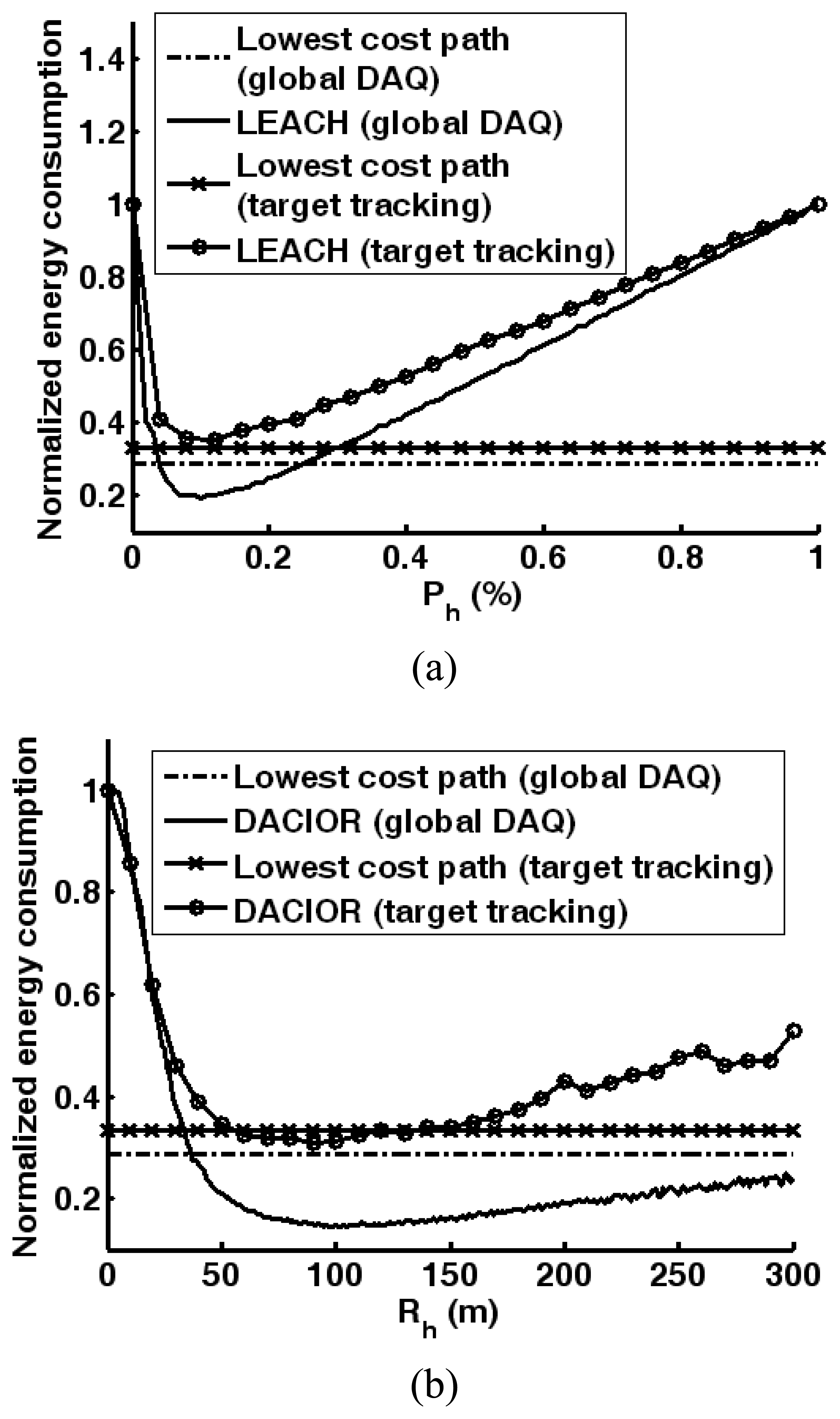
Figure 7.
Energy consumption of each sensor node after target tracking with lowest cost path, LEACH and DACIOR.
Figure 7.
Energy consumption of each sensor node after target tracking with lowest cost path, LEACH and DACIOR.

Figure 8.
Routing scheme with different approaches: (a) lowest cost path; (b) LEACH; (c) DACIOR.
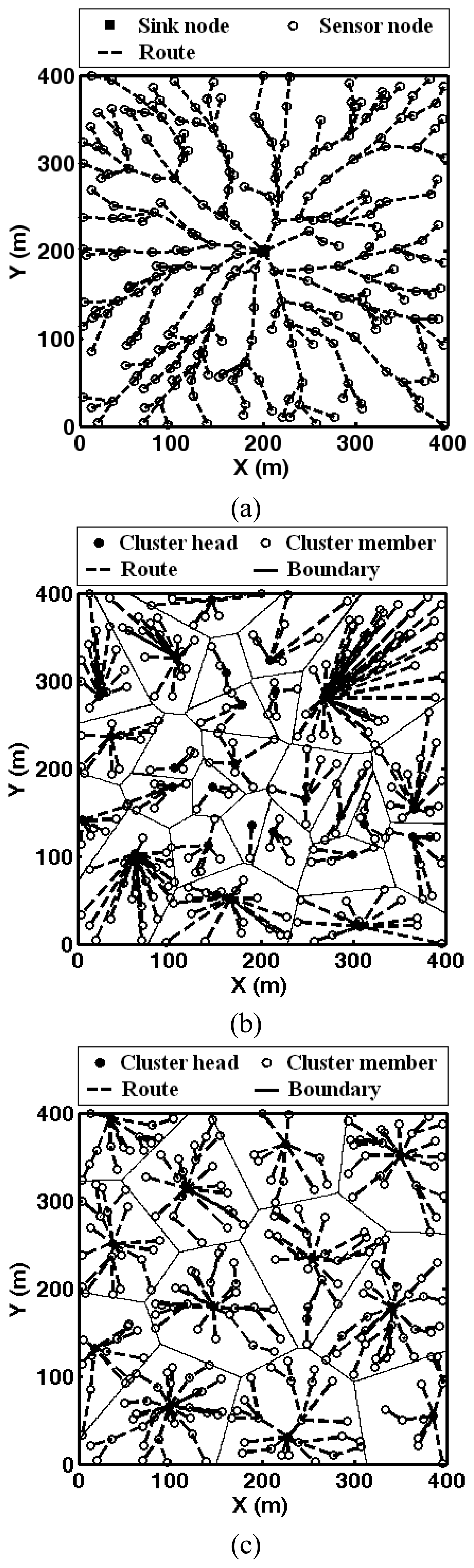
Figure 9.
Target prediction results: (a) target trajectory; (b) position prediction error.
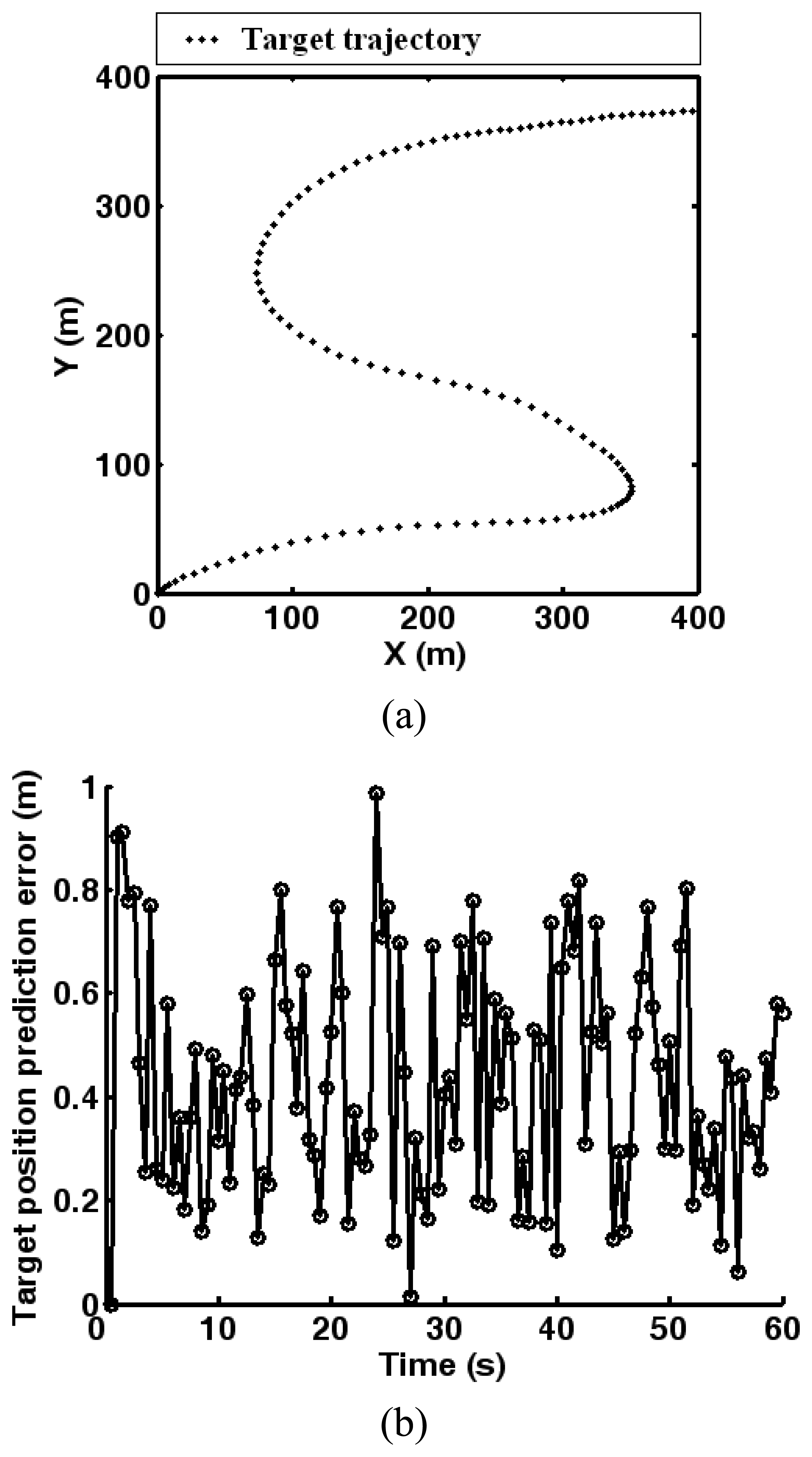
Figure 10.
Total energy consumption during target tracking using lowest cost path, LEACH and DACIOR.
Figure 10.
Total energy consumption during target tracking using lowest cost path, LEACH and DACIOR.
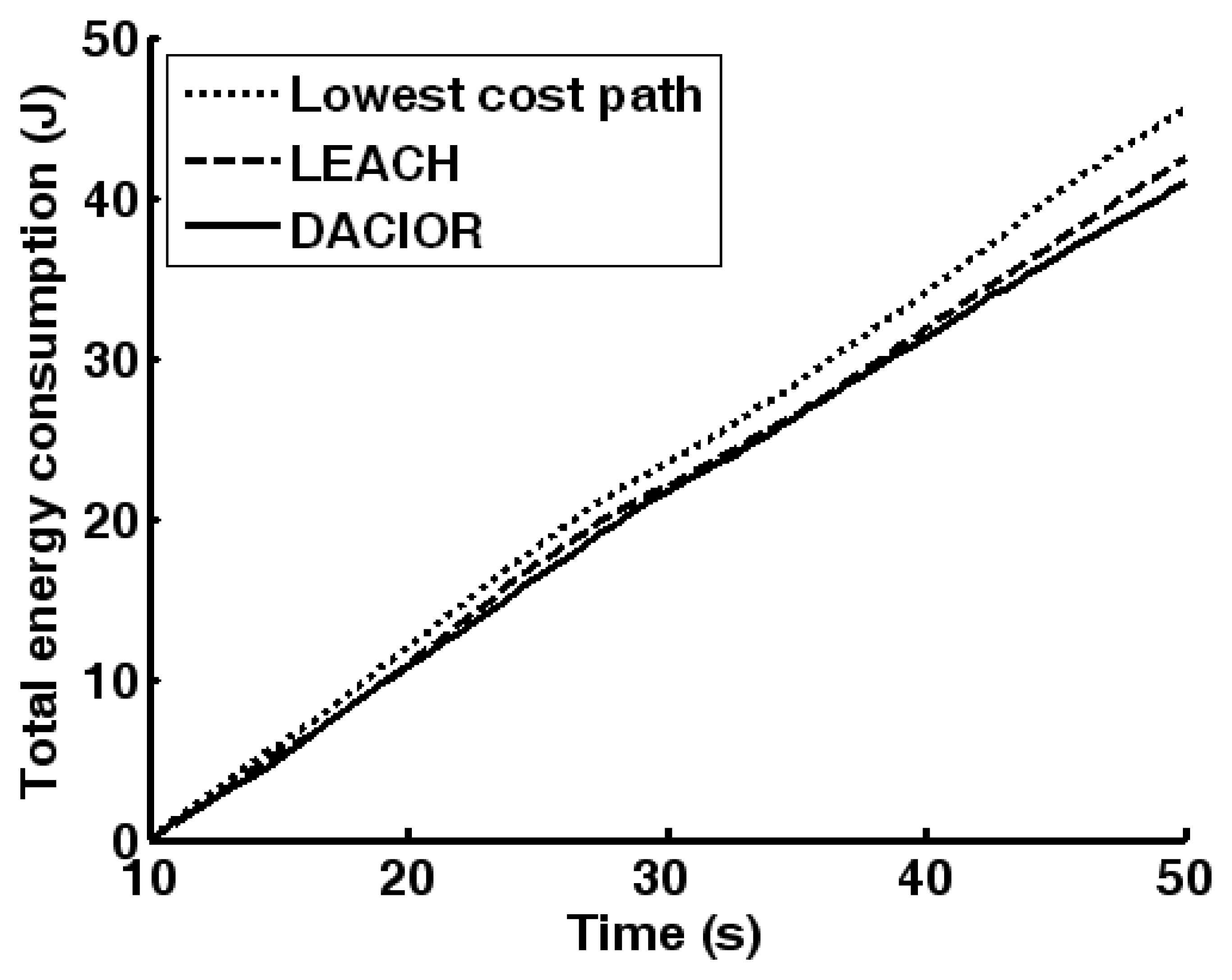
Figure 11.
Sensor node selection optimization results by BPSO: (a) selected sensor node number; (b) collaborative sensing error.
Figure 11.
Sensor node selection optimization results by BPSO: (a) selected sensor node number; (b) collaborative sensing error.
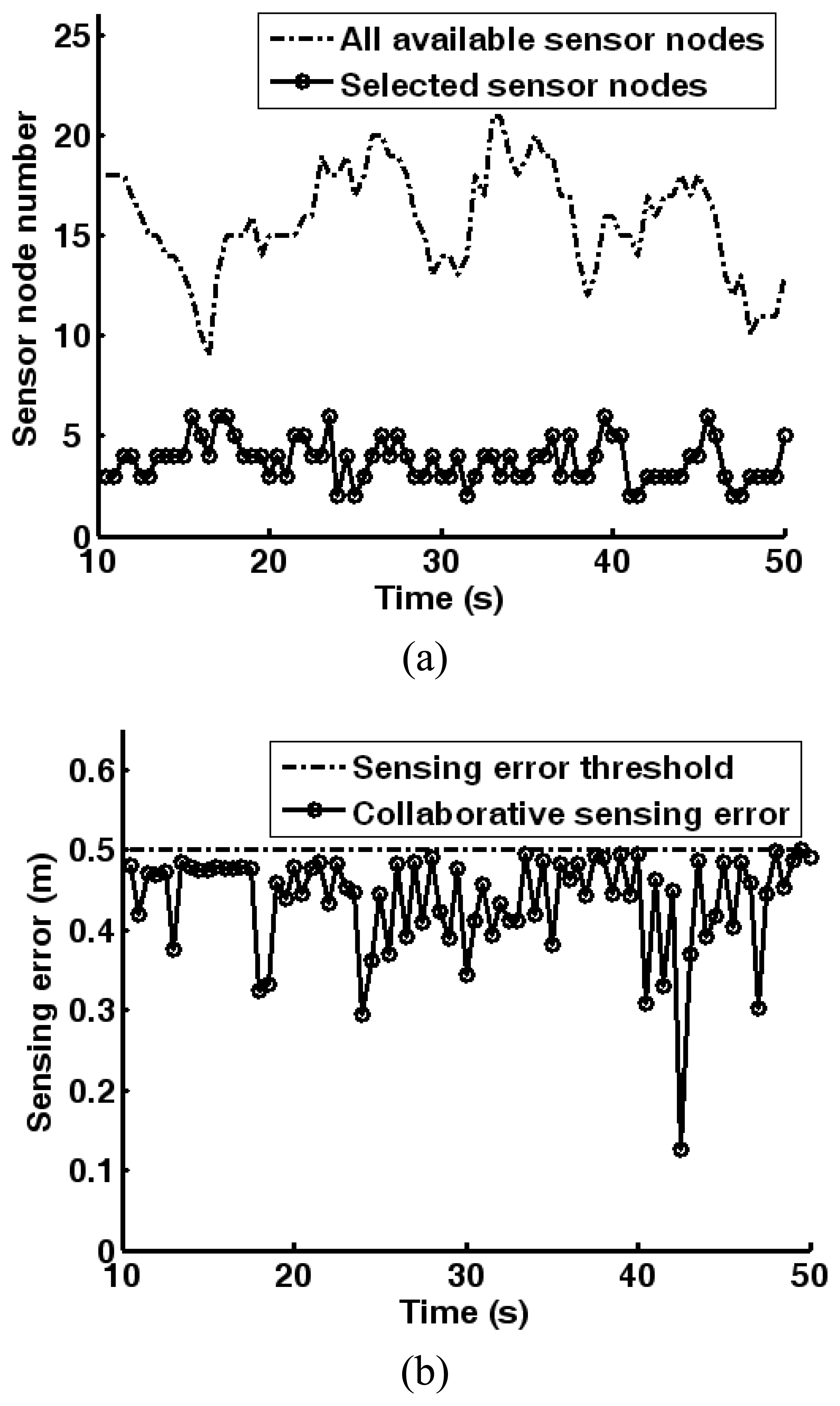
Figure 12.
Convergence curves of energy metric obtained by BPSO and GA in sensor node selection optimization.
Figure 12.
Convergence curves of energy metric obtained by BPSO and GA in sensor node selection optimization.
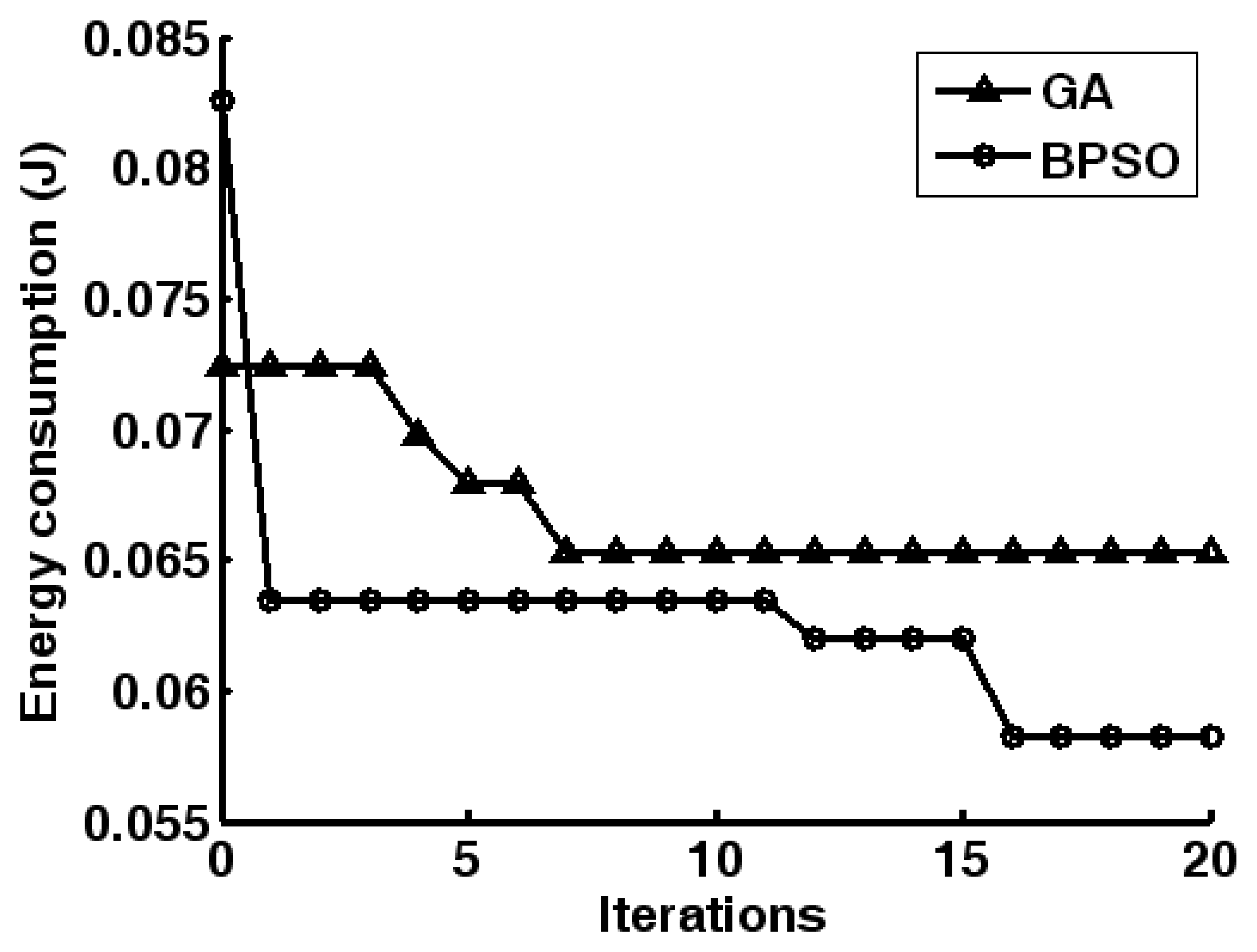
Figure 13.
Total energy consumption in target tracking simulation with BPSO.

© 2007 by MDPI ( http://www.mdpi.org). Reproduction is permitted for noncommercial purposes.
Share and Cite
MDPI and ACS Style
Wang, X.; Ma, J.-J.; Wang, S.; Bi, D.-W. Cluster-based Dynamic Energy Management for Collaborative Target Tracking in Wireless Sensor Networks. Sensors 2007, 7, 1193-1215. https://doi.org/10.3390/s7071193
AMA Style
Wang X, Ma J-J, Wang S, Bi D-W. Cluster-based Dynamic Energy Management for Collaborative Target Tracking in Wireless Sensor Networks. Sensors. 2007; 7(7):1193-1215. https://doi.org/10.3390/s7071193
Chicago/Turabian StyleWang, Xue, Jun-Jie Ma, Sheng Wang, and Dao-Wei Bi. 2007. "Cluster-based Dynamic Energy Management for Collaborative Target Tracking in Wireless Sensor Networks" Sensors 7, no. 7: 1193-1215. https://doi.org/10.3390/s7071193