Animals as Mobile Biological Sensors for Forest Fire Detection

Abstract
:1. Introduction
1.1 Related Works
1.2 Motivation
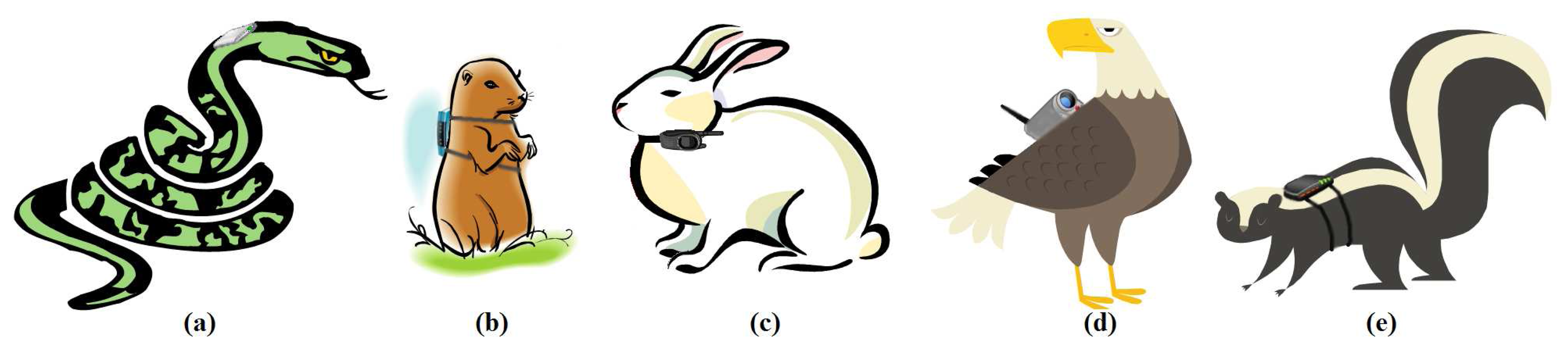
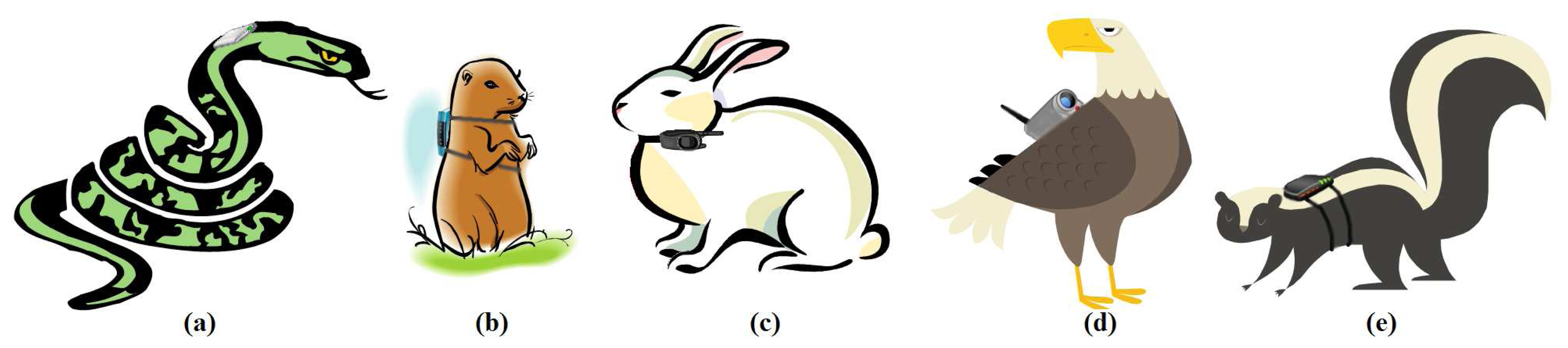
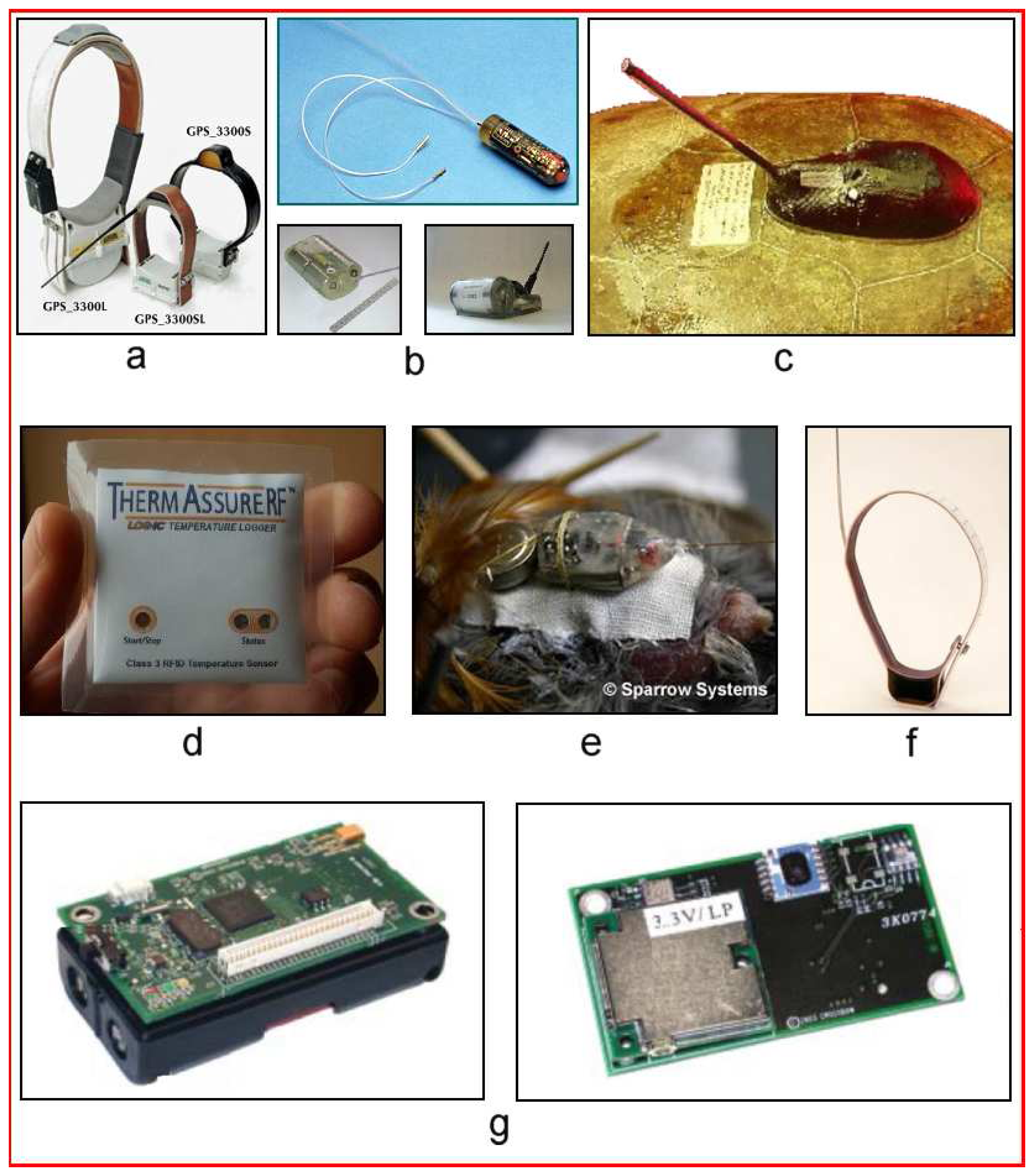
2. Animals as Mobile Biological Sensors
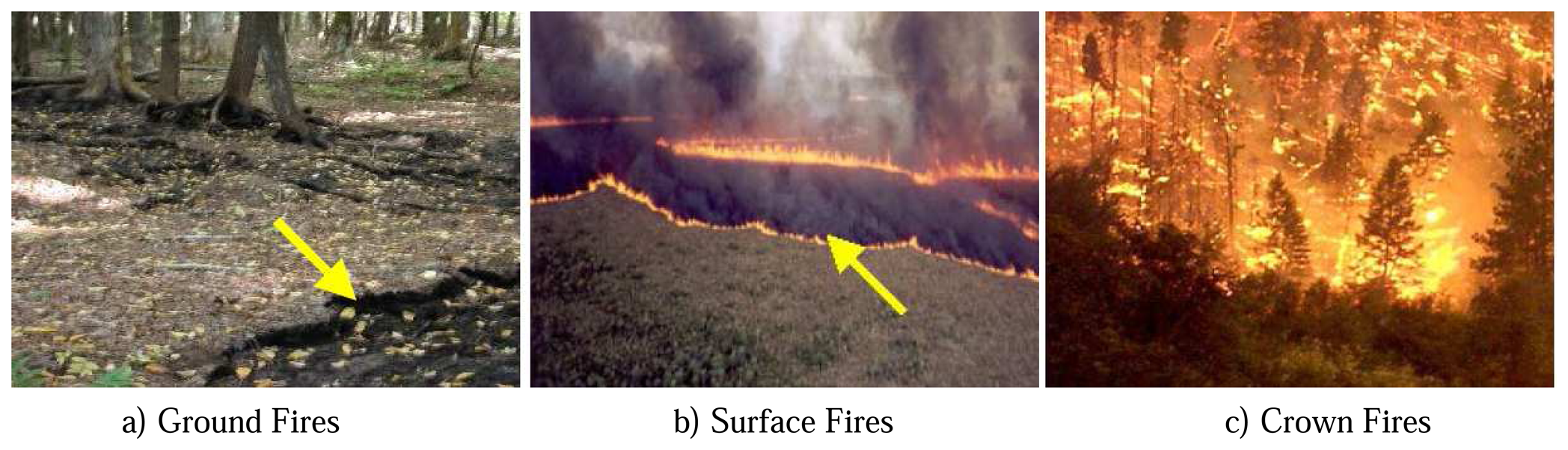
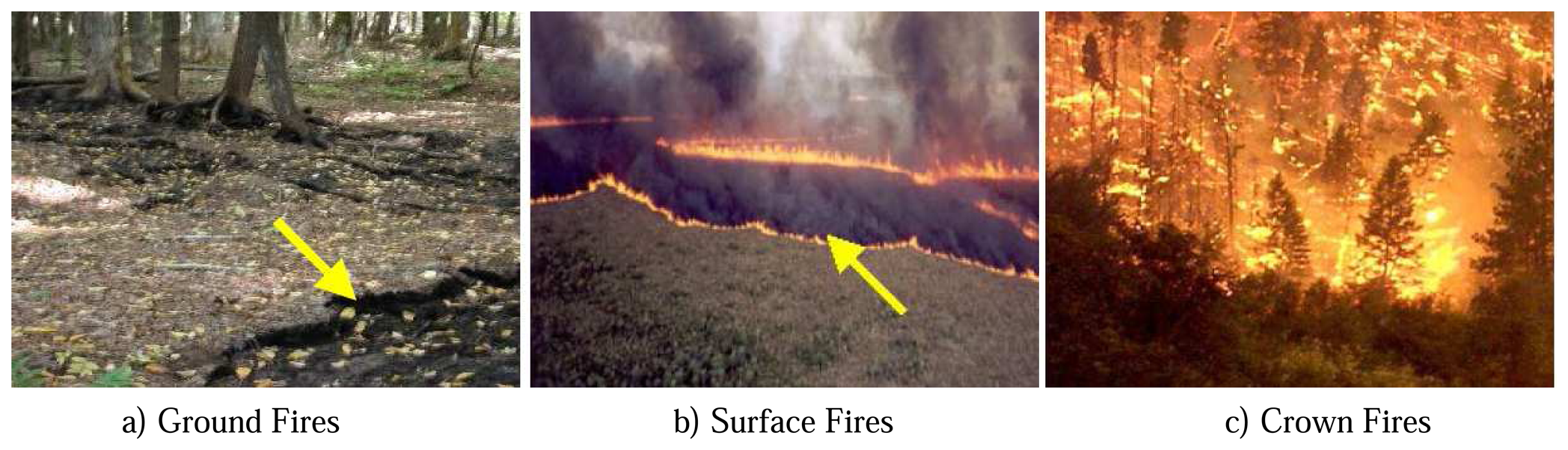
2.1. Appropriate animals and sensors for certain kind of forest' fires
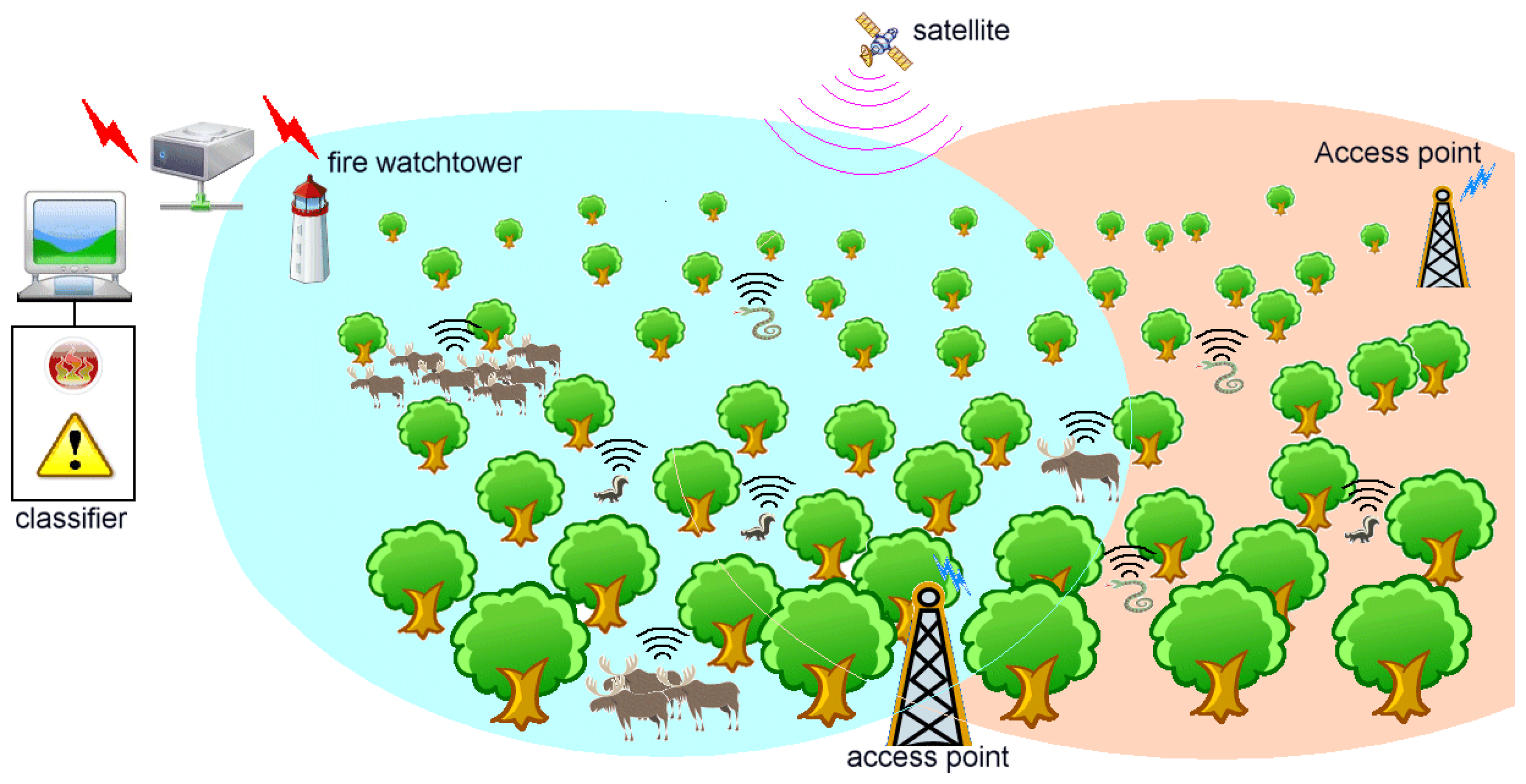
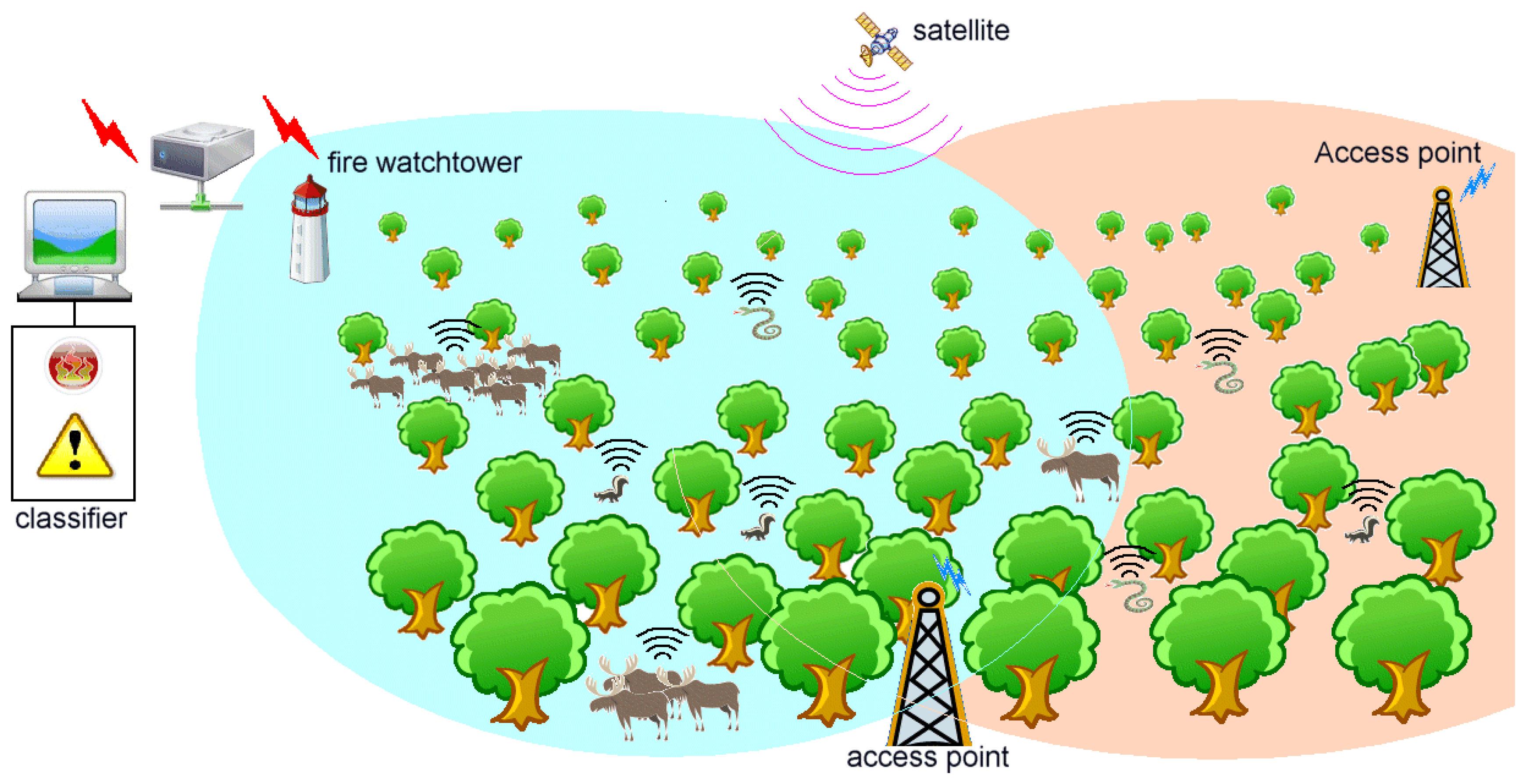
2.2. Proposed System Infrastructure
- Communication channels: To build a wireless network in a forest for fire detection, two methods can be considered. One of them is a Satellite based system: Using a satellite is fairly complex and requires the satellite to focus on a certain area. In spite of the high cost this system, it has some advantage and can be used for other detection methods such as image processing, that is, TD and ABC simultaneously. When a satellite connection is unavailable or problematic (for example because some points are invisible to the satellite, especially floors in closed forests, and there may be many such blind spots in a forest), the alternative is the use of Access points. These are used to collect thermal and movement data from sensors attached to animals (MBS), which are then sent to the central computer. GSM base stations, high voltage poles, tall, massive trees, forest watchtowers, and poles particularly designed for forest use are possible access points. Frequency of access points depends on forest and territory specification, and type of sensors used in the system. If sensors enable long distance transmission facilities, access points can be set at 3-4 km intervals.
- A central classifier. This device is used to classify data received from MBS via the access points, and is assisted by a decision support system. This center continuously receives data from access points and stores them in a database. Because there may be thousands of MBS in large forests, computers located in this centre must be large enough to deal with multiple transactions concurrently.
- MBSs, which are the most important parts of the system as mentioned before, can vary in accordance with method to be used in the system. The essential activity of MBSs is to send changes in temperature or radiation level, and current location of animals to the access points.
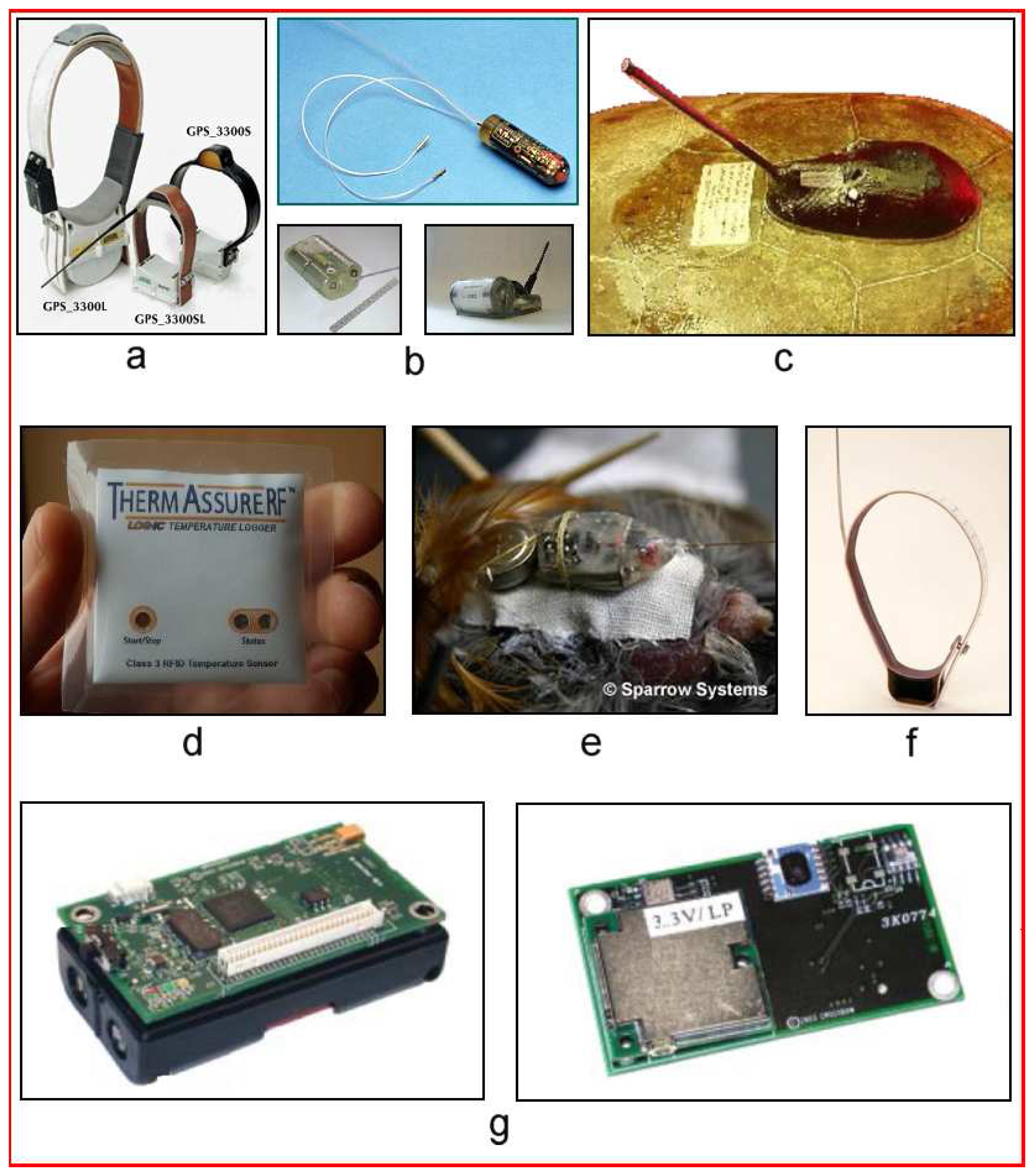
- Trustworthy, robust and highly sensitive sensors must be combined with suitable animals to enhance system reliability and sustainability.
2.3. Fire Detection Methods in Proposed System
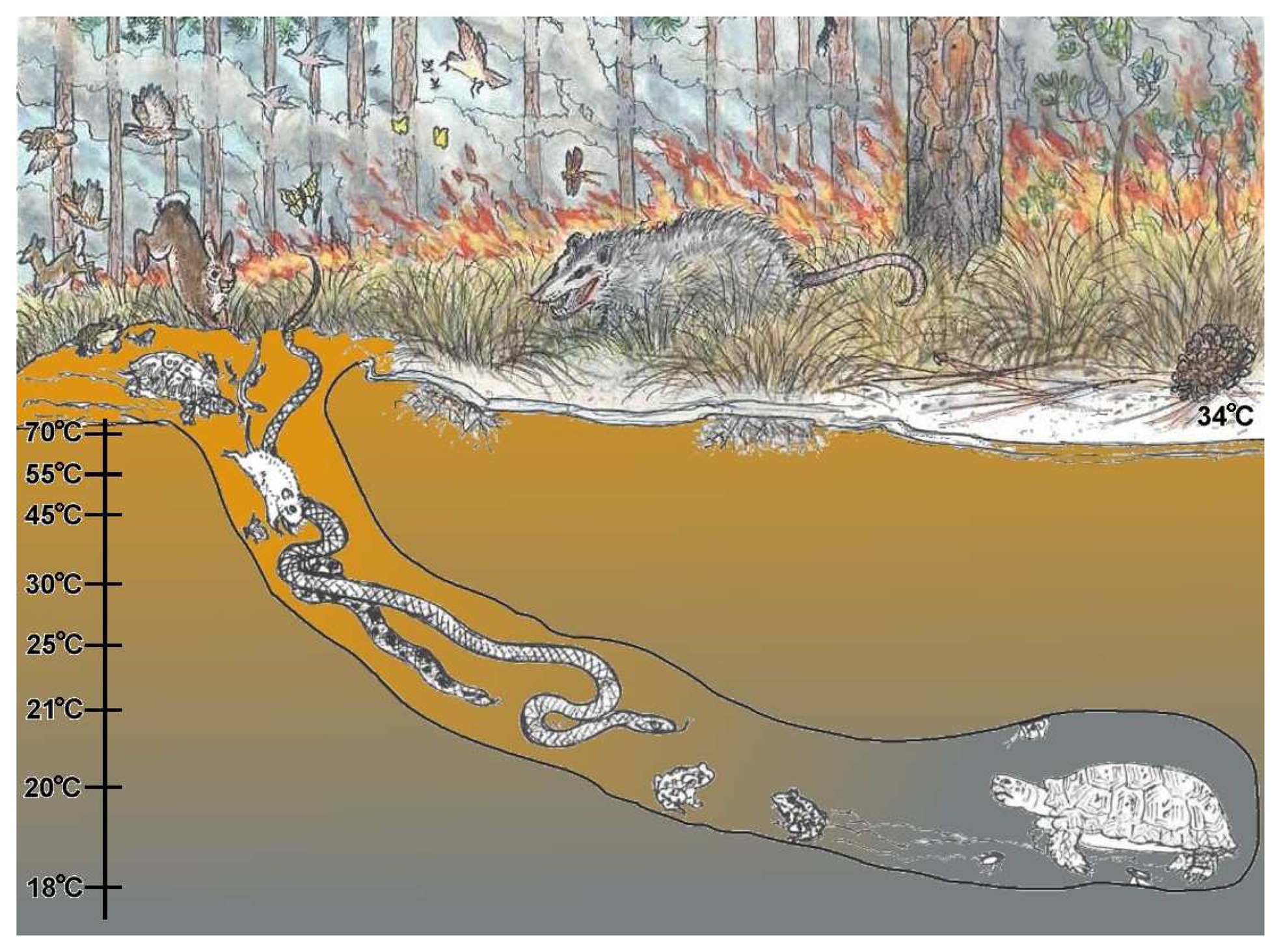
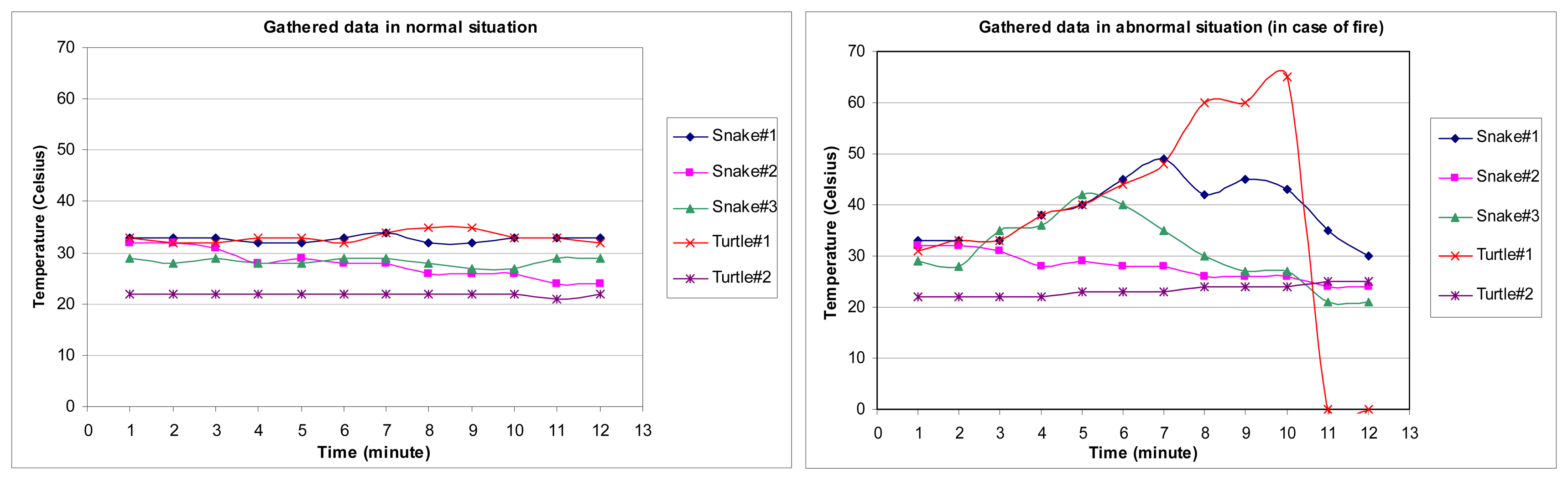
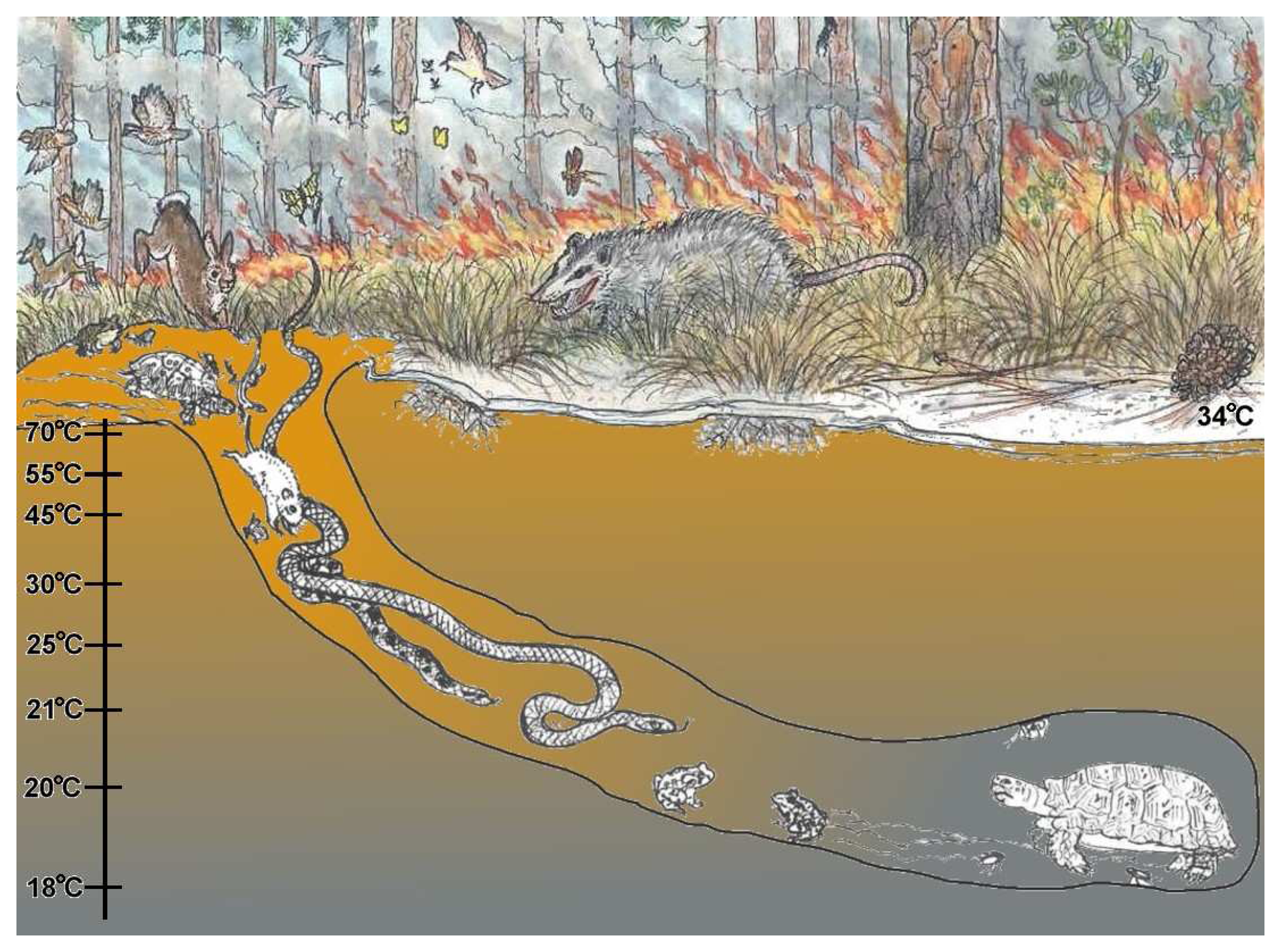
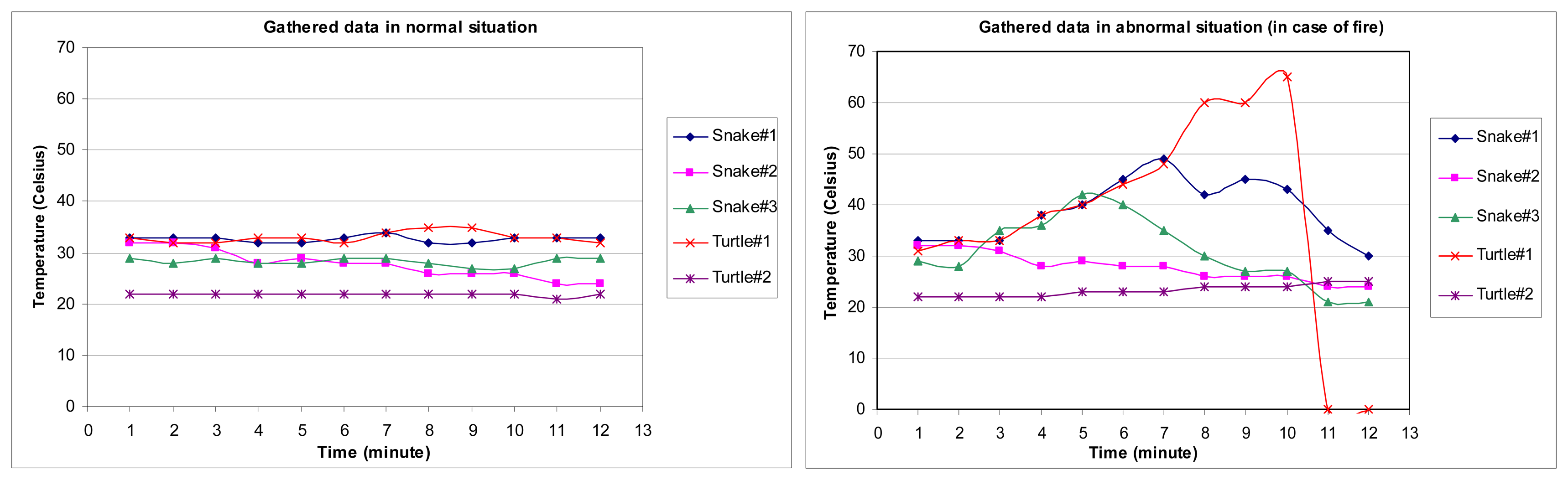
2.3.1 TD - Measuring the instant changes in temperature
| Animals | : 3 Loria Forest snakes, 2 Egyptian tortoises |
| Sensors | : 5 SR-TP11-25 (Temperature and Pressure sensor produced by Lotek Corp) |
| Area | : 1 acre |
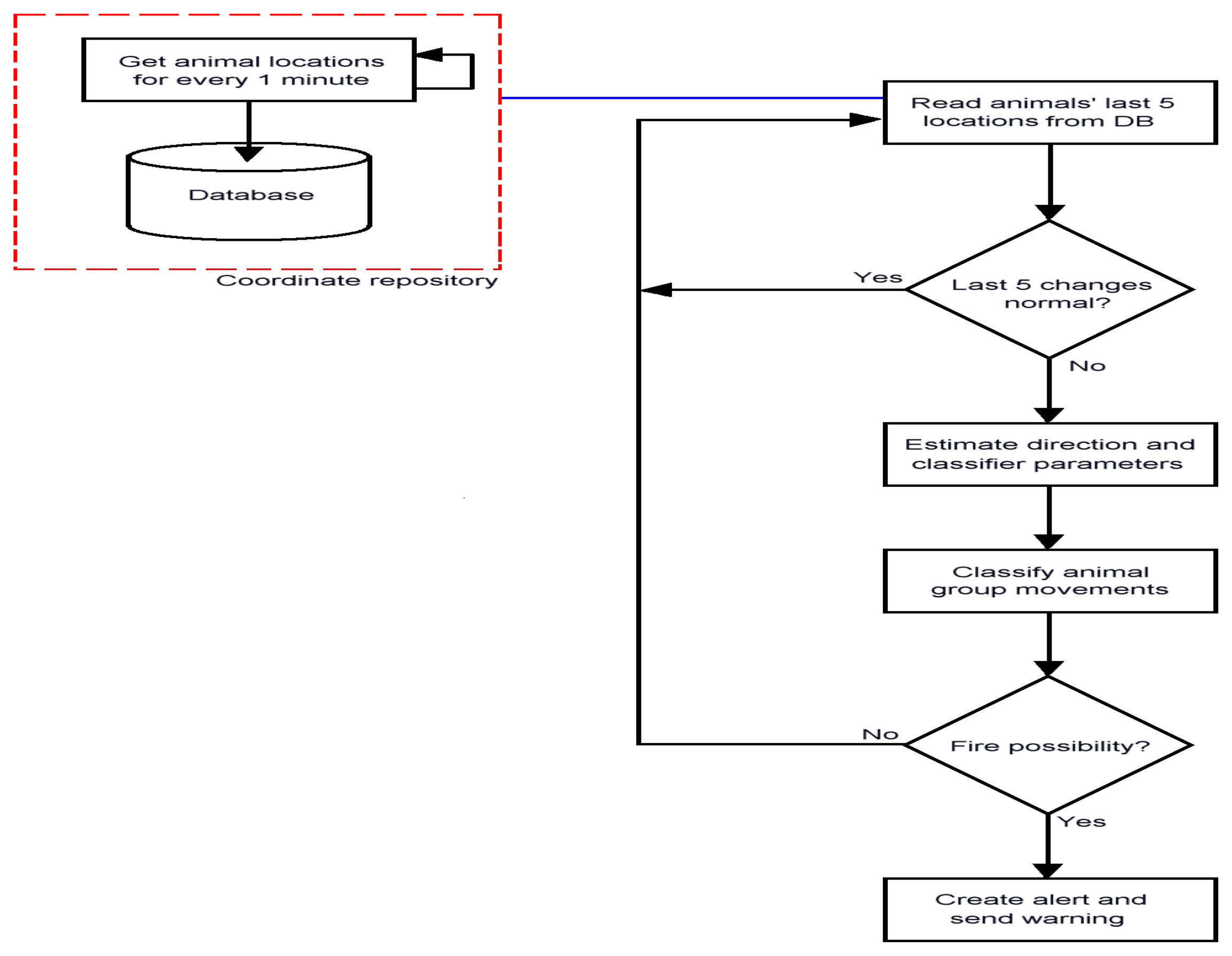
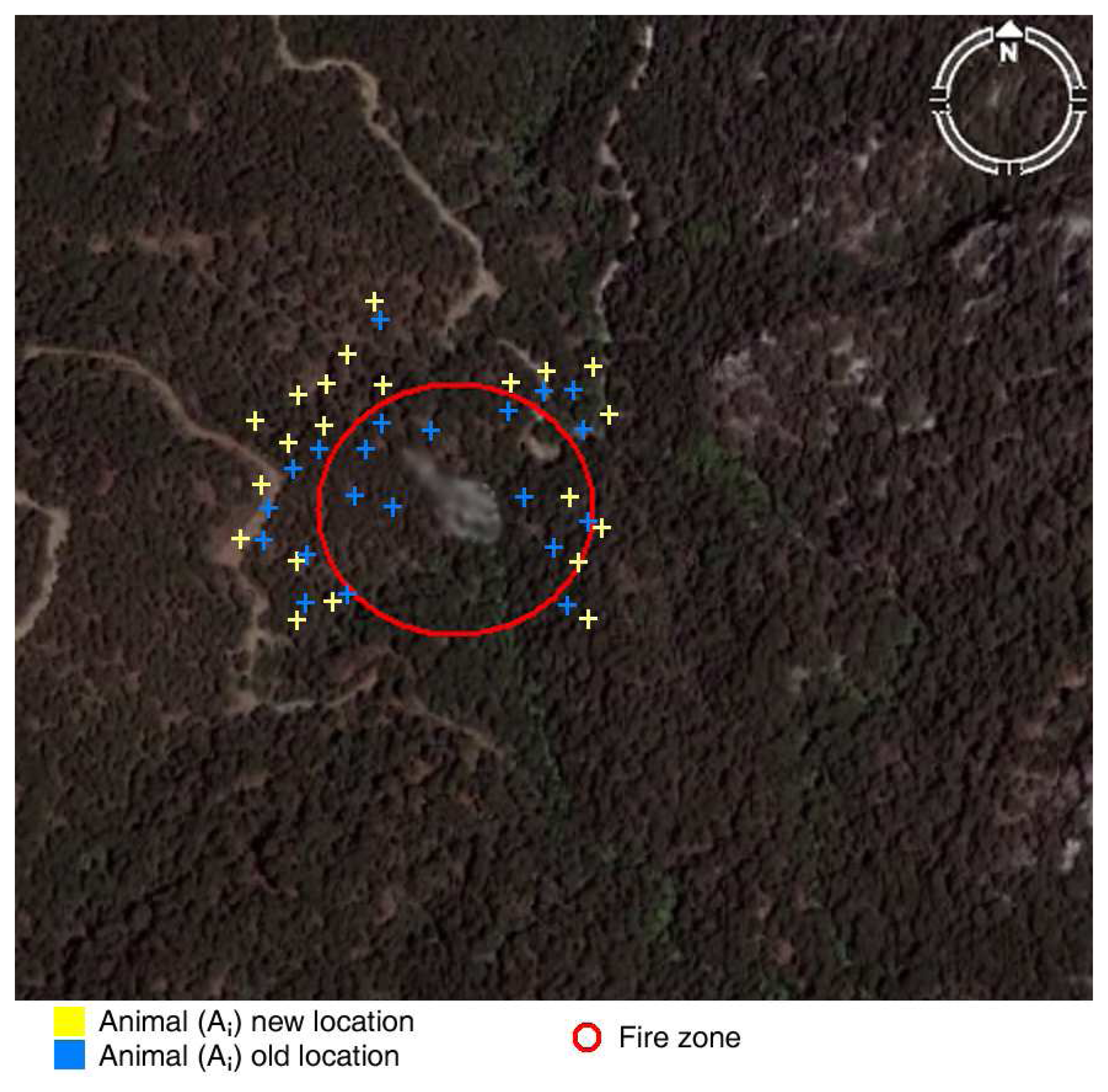
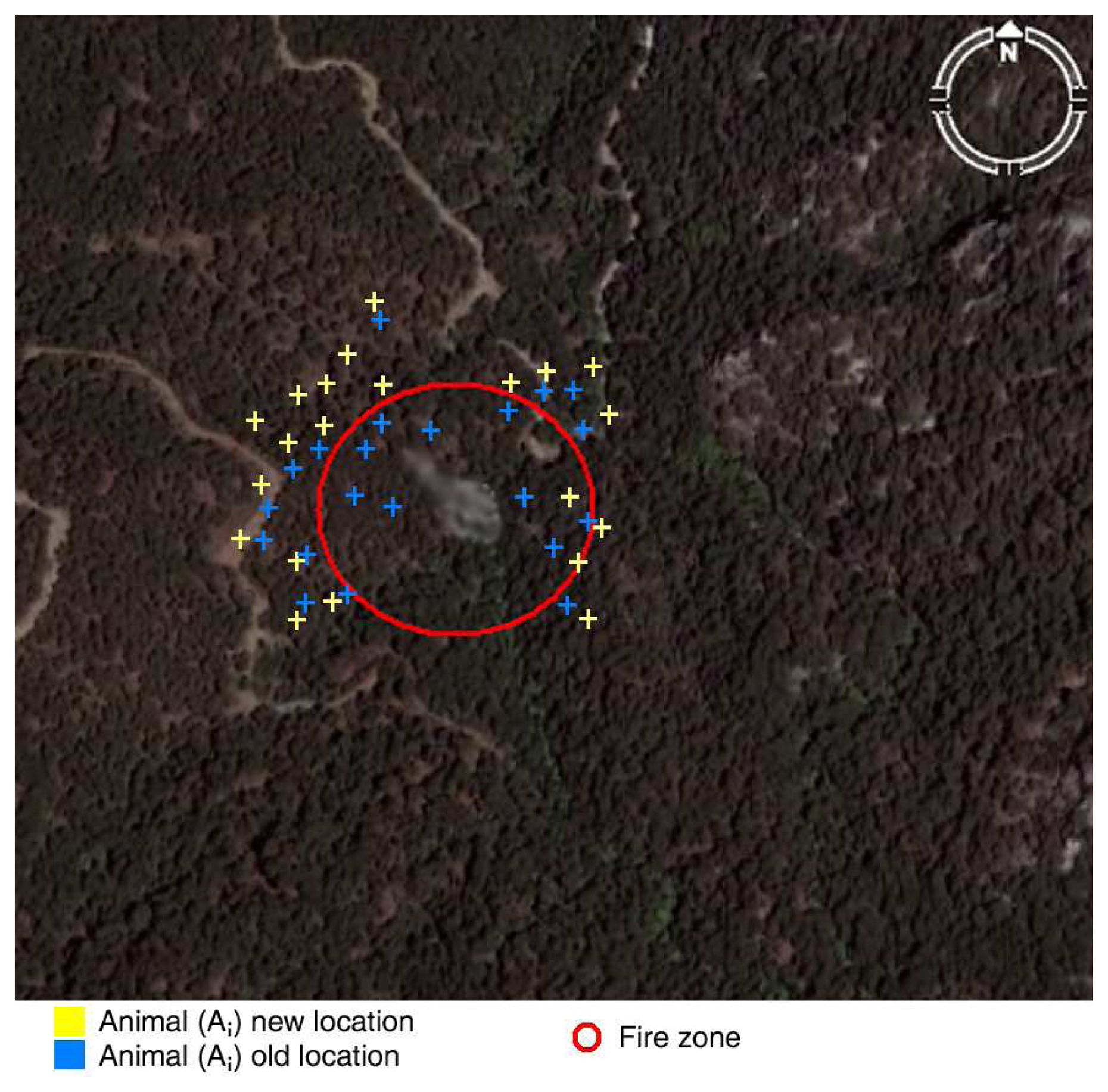
2.3.2 ABC - Classifying MBS actions
3. Discussion
Problems and Disadvantages
- It is neither easy to capture suitable animals from the environment nor equip them with sensors.
- Animals can be specially trained for this purpose, and while it may seem that using specially trained animals may infringe upon their freedom, in fact the lives of many animals may be saved by forest fire prevention. This needs to be made clear to society.
- There is a possibility of lack of appropriate animals for special forests.
- The use of batteries poses several problems. Firstly, those used in sensors may cause environmental pollution, introducing extra radiation and cadmium to the forest and animals. Moreover, each battery needs to be changed periodically, but capturing the MBS to do this is not easy. Furthermore, if the batteries operate incorrectly, the wrong data would be sent.
- In the thermal detection method, determining constraints such as usual climate conditions, daily temp differences, seasonal normal temp values, etc. are problematic.
- Determining the constraints using the panic detection method is more difficult than in the thermal detection method, since the selection of animals is very important. Data must be collected on animals' feeding, mating and other habits. In addition, classification of behaviour can only be made for the same type of animals, so exclusive groups of the same animal have to be used for panic detection.
Advantages
- Proposed methods are very convenient and can easily and usefully be adapted to current forest fire detection systems.
- Using animals as Mobile Biological Sensors enables a more dynamic and wider detection as compared to fixed sensors.
- The fewer sensors needed means a significant reduction in cost when compared to fixed sensors.
- Since animals can go where human can not, previously unreachable areas can now be controlled by MBSs.
- Applying these systems will reveal more knowledge about different species of animals and their behavior.
- The methods proposed can be adapted animal tracking systems currently in use, thus, lowering cost.
- Classification of animals' individual and group behavior can be used for other purposes, in particular, the system may be use to detect poaching, and monitor comprehensive animal deaths.
- If the access points are constructed as watchtowers in apertures of forest, these can be combined with rainwater collection pools, which can be made available as water supplier to helicopters involved in fire extinguishing.
4. Conclusion and Future Works
- A number of investigations can be made regarding animal behavior in case of fire to improve system reliability.
- A reorganization of classification algorithms to be used for animals' panic detection, could be developed for classification of MBSs.
- New sensors can be produced or existing sensors can be improved to increase robustness of the proposed system.
- New wireless technologies and new satellite tracking systems can be adapted to increase the efficiency of the system.
- Some studies on fire extinguishing such as using CO2 bombs at the access points for fire spread prevention, can be made.
Acknowledgments
References
- Golding, N. Climate Change and the Implications for Wildfire-A Global Perspective. 4th International Wildland Fire Conference, Seville, Spain, 13-17 May 2007.
- Pescovitz, D. Marine animals as sensors. Boingboing. Posted, February 19, 2006. Retrieved from: http://www.boingboing.net/2006/02/19/marine-animals-as-se.html available Nov, 20th 2007.
- Costa, D.; Block, B. Marine Animals Used As Ocean Sensors. Retrieved from: http://www.we-make-money-not-art.com/archives/008060.php available Oct, 20th 2007.
- Fedak, M.; Lovell, P.; McConnell, B.; Hunter, C. Overcoming the constraints of long range radio telemetry from animals: Getting more useful data from smaller packages. Integ. Comp. Biol. 2002, 42, 3–10. [Google Scholar]
- Patrovsky, A.; Biebl, E. M. Microwave sensors for detection of wild animals during pasture mowing. Advances in Radio Science 2005, 3(10), 211–217. [Google Scholar]
- Boyd, M.; Harnden, P.; Maher, Michael; Gregory, A. M. Forest Fire Detection Systems Design Management Science. Management Science in Canada 1973, 20(4), 617–628. [Google Scholar]
- Roy, P.S. Forest fire and degradation assessment using satellite remote sensing and Geographic Information System, Satellite Remote Sensing and GIS Applications in Agricultural Meteorology. Proceedings of a Training Workshop held, DehraDun, India, 7-11 July 2003; pp. 361–400.
- UNEP. UNEP Assists ASEAN Countries to Combat Forest Fires. Retrieved from: http://www.rrcap.unep.org/projects/forestfires.cfm available Oct, 20th 2007.
- Lafarge, F.; Descombes, X.; Zerubia, J. Forest Fire Detection based on Gaussian field analysis. Proc. European Signal Processing Conference (EUSIPCO), Poznan, Poland, September, 2007.
- Nakau, K.; Fukuda, M.; Kushida, K.; Hayasaka, H.; Kimura, K.; Tani, H. Forest fire detection based on MODIS satellite imagery, and Comparison of NOAA satellite imagery with fire fighters' Information. IARC/JAXA Terrestrial Team Workshop, February 22, 2006; pp. 18–23.
- Stipaničev, D.; Vuko, T.; Krstinić, D.; Štula, M.; Bodrožić, L. Forest Fire Protection by Advanced Video Detection System - Croatian Experiences. Third TIEMS Workshop - Improvement of Disaster Management System, Trogir, Sept. 26 - 27, 2006. on CD proceeding..
- Toreyin, B.U.; Dedeoglu, Y.; Cetin, A.N. Computer vision based forest fire detection and monitoring system. 4th International Wildland Fire Conference, Seville, Spain, 13-17 May, 2007.
- Fujiwara, K.; Kushida, K.; Fukuda, M.; Kudoh, J. Forest fire detection in far east Russian region with NOAA AVHRR images. Geosciences and Remote Sensing Symposium, 2002. IGARSS '02. 2002 IEEE International, 24-28 June 2002; 4, pp. 2054–2056.
- Casanova, J.L.; Calle, A.; Romo, A.; Sanz, J. Forest Fire Detection and Monitoring By Menas of an Integrated MODIS-MSG SYSTEM. In Satellite-based fire monitoring network in Northern Eurasia: Methods, Data Products, Applications; Moscow; Space Research Institute, November 17 2004; pp. 409–415. [Google Scholar]
- Ertena, E.; Kurgunb, V.; Musaoglu, N. Forest Fire Risk Zone Mapping From Satellite Imagery And GIS: A Case Study. International Journal of Applied Earth Observation and Geoinformation 2002, 4, 1–10. [Google Scholar]
- Filizzola, C.; Marchese, F.; Mazzeo, G.; Pergola, N.; Tramutoli, V. Robust satellite techniques (RST) for forest fire Detection. Geophysical Research Abstracts. 2007, 9, 06506. [Google Scholar]
- Hefeeda, M. Forest Fire Modeling and Early Detection using Wireless Sensor Networks. Technical Report TR 2007-08; In School of Computing Science; Simon Fraser University, August 2007. [Google Scholar]
- Ollero, A.; Martinez-De Dios, J-R.; ARRÚE, B.C. Integrated Systems For Early Forest-Fire Detection. III International Conference on Forest Fire Research 14th Conference on Fire and Forest Meteorology, Luso, 16/20 November 1998; VOL II, pp. 1977–1988.
- Yeung, J. Animals to be used as quake sensors (China Daily). 2007. Retrieved from: http://english.peopledaily.com.cn/200705/22/eng20070522_376760.html available Oct, 20th, 2007.
- Kahn, LH. Animals: The world's best (and cheapest) biosensors. The Bulletin Online 14 March 2007, Retrieved from : http://www.thebulletin.org/columns/laura-kahn/20070314.html available Nov, 13, 2007.
- Lee, GY.; Lee, DE.; Jeong, CK. Bio-adhoc sensor networks for early disaster warning. IEICE Transaction On Communications E90B. 2007, 5, 1241–1244. [Google Scholar]
- Cochran, J. Sparrow Systems Automated radio telemetry system initiative. Retrieved from: http://www.princeton.edu/∼wikelski/research/physiology.htm available Oct, 20th 2007.
- Fornaro, R.; Coblentz, D.; Hawkins, D.; Lewis, J.; Noffsinger, B. NEAT-Networks for Endangered Animal Tracking. Computer Society International Design Competition 2005 Final Report. 2005. [Google Scholar]
- Evidencia. ThermAssureRF. Retrieved from: http://www.evidencia.biz/products/prototemp_pr.htm/ThermAssureRF.htm available Oct, 20th 2007.
- Lotek Corp 2002. Retrieved from http://www.lotek.com available Nov, 13th 2007.
- Caribbean Conservation Corporation & Sea Turtle Survival League, How Tracking Sea Turtles by Satellite Works. Retrieved from http://www.cccturtle.org/satellitetracking.php?page=satintro available Nov, 13th 2007.
- The Longleaf Alliance, These Animals Play it Cool When Fire Sweeps Through the Woods. Retrieved from http://www.auburn.edu/academic/forestry_wildlife/longleafalliance/teachers/teacherkit/escapefire.htm available Oct, 20th 2007.
- Genc, F.P. SIMDL-A Discrete System Simulation Language, Modeling, Simulation, Akademie-Verlag Berlin. Jounal of System Analysis 1990, 7, 2. [Google Scholar]
- Ecology Asia, Loria Forest Snake. Retrieved from: http://ecologyasia.com/verts/snakes-png/loriaforest-snake.htm available Nov, 14th 2007.
- California Turtle and Tortoise Club, Egyptian tortoise, Testudo kleinmanni. Retrieved from: http://www.tortoise.org/gallery/picklein.html available Nov, 15th 2007.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Sensor Type | Physical Specifications | Estimated Life (days) | |||
|---|---|---|---|---|---|---|
| Size in mm (dia × length) | Air weight g. | Water weight g. | 2s between bursts | 5s between bursts | ||
| Sensors for use with SRX 400A / SRX 600 radio receiver family: | ||||||
| SR-M11-12 | Motion | 11 × 41 | 7.7 | 4.3 | 59 | 137 |
| SR-TP11-18 | Temp & Pressure | 11 × 51 | 9.0 | 4.4 | 142 | 348 |
| SR-TP11-25 | Temp & Pressure | 11 × 58 | 10 | 5.0 | 203 | 497 |
| SR-PM11-25 | Pressure & Motion | 11 × 58 | 11 | 5.2 | 203 | 497 |
| SR-PM16-25 | Pressure & Motion | 16 × 53 | 18 | 12 | 487 | 3 yr. |
| Sensors for use with MAP 600 MP, RT, SDL acoustic receiver family: | ||||||
| MA-M11-12 | Motion | 11 × 42 | 7.9 | 4.0 | 12 | 29 |
| MA-TP11-18 | Temp & Pressure | 11 × 54 | 9.1 | 4.7 | 29 | 72 |
| MA-TP11-25 | Temp & Pressure | 11 × 61 | 10 | 5.6 | 41 | 103 |
| MA-PM11-25 | Pressure & Motion | 11 × 61 | 11 | 5.8 | 41 | 102 |
| MA-PM16-50 | Pressure & Motion | 16 × 81 | 32 | 17 | 137 | 340 |
| Sensors that work with both radio and acoustic receivers: | ||||||
| CH-M11-12 | Motion | 11 × 49 | 9.0 | 4.7 | 19 | 47 |
| CH-TP11-18 | Temp & Pressure | 11 × 58 | 11 | 5.3 | 48 | 120 |
| CH-TP11-25 | Temp & Pressure | 11 × 65 | 12 | 5.9 | 69 | 171 |
| CH-PM11-25 | Pressure & Motion | 11 × 70 | 13 | 6.1 | 69 | 169 |
| CH-PM16-50 | Pressure & Motion | 16 × 83 | 38 | 21 | 243 | 597 |
© 2007 by MDPI ( http://www.mdpi.org). Reproduction is permitted for noncommercial purposes.
Share and Cite
Sahin, Y.G. Animals as Mobile Biological Sensors for Forest Fire Detection. Sensors 2007, 7, 3084-3099. https://doi.org/10.3390/s7123084
Sahin YG. Animals as Mobile Biological Sensors for Forest Fire Detection. Sensors. 2007; 7(12):3084-3099. https://doi.org/10.3390/s7123084
Chicago/Turabian StyleSahin, Yasar Guneri. 2007. "Animals as Mobile Biological Sensors for Forest Fire Detection" Sensors 7, no. 12: 3084-3099. https://doi.org/10.3390/s7123084
APA StyleSahin, Y. G. (2007). Animals as Mobile Biological Sensors for Forest Fire Detection. Sensors, 7(12), 3084-3099. https://doi.org/10.3390/s7123084