Modeling of Rate-Independent and Symmetric Hysteresis Based on Madelung’s Rules

Abstract
1. Introduction
- We propose a modeling method to describe the symmetric hysteresis by directly constructing its trajectory based on Madelung’s rules rather than considering these rules as criteria. Furthermore, this method is translated into an algorithm that can be run by digital processors.
- The relationship between the proposed method and the PI model is investigated.
2. Trajectory Construction Method
2.1. Madelung’s Rules and Their Applications in Trajectory Construction
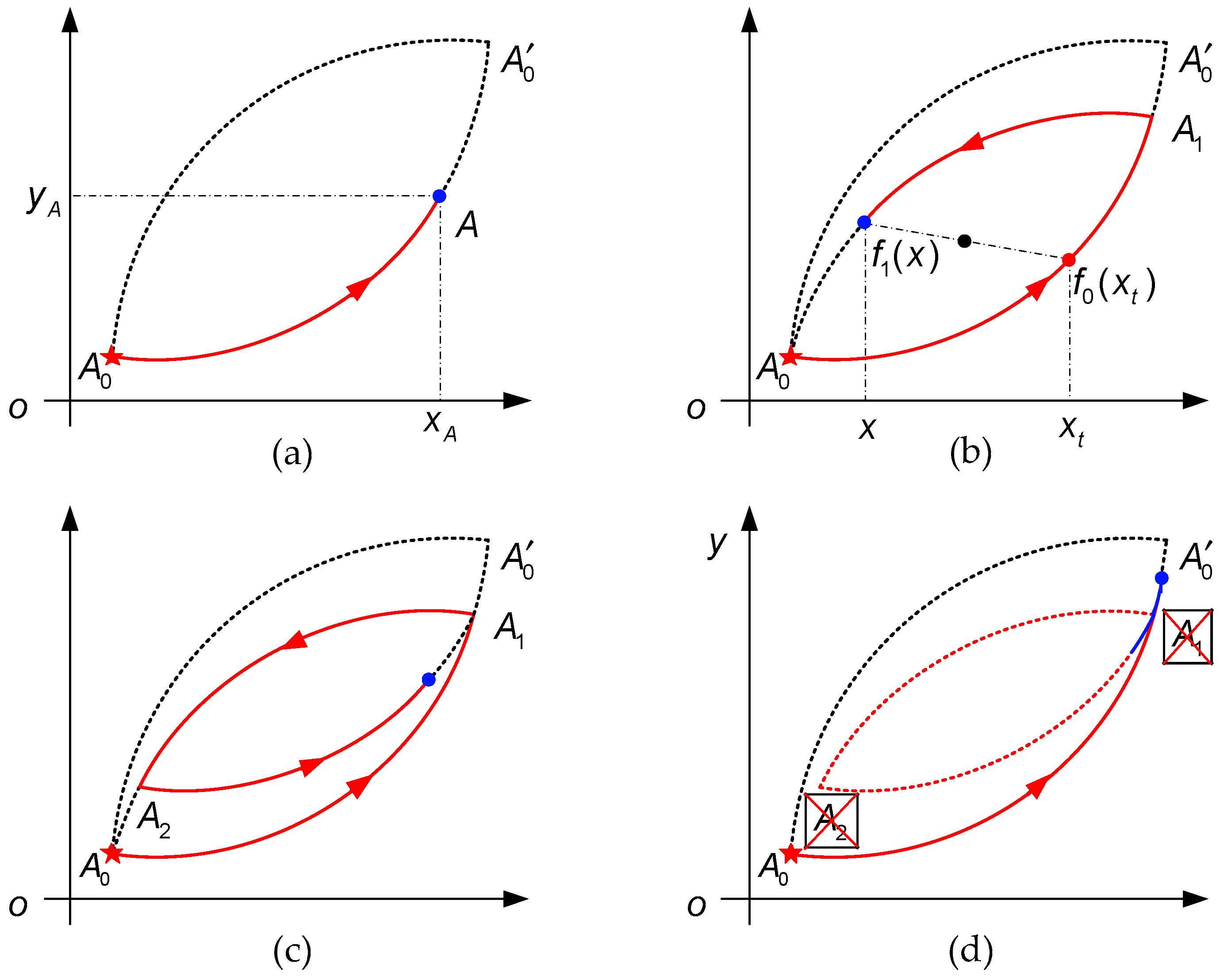
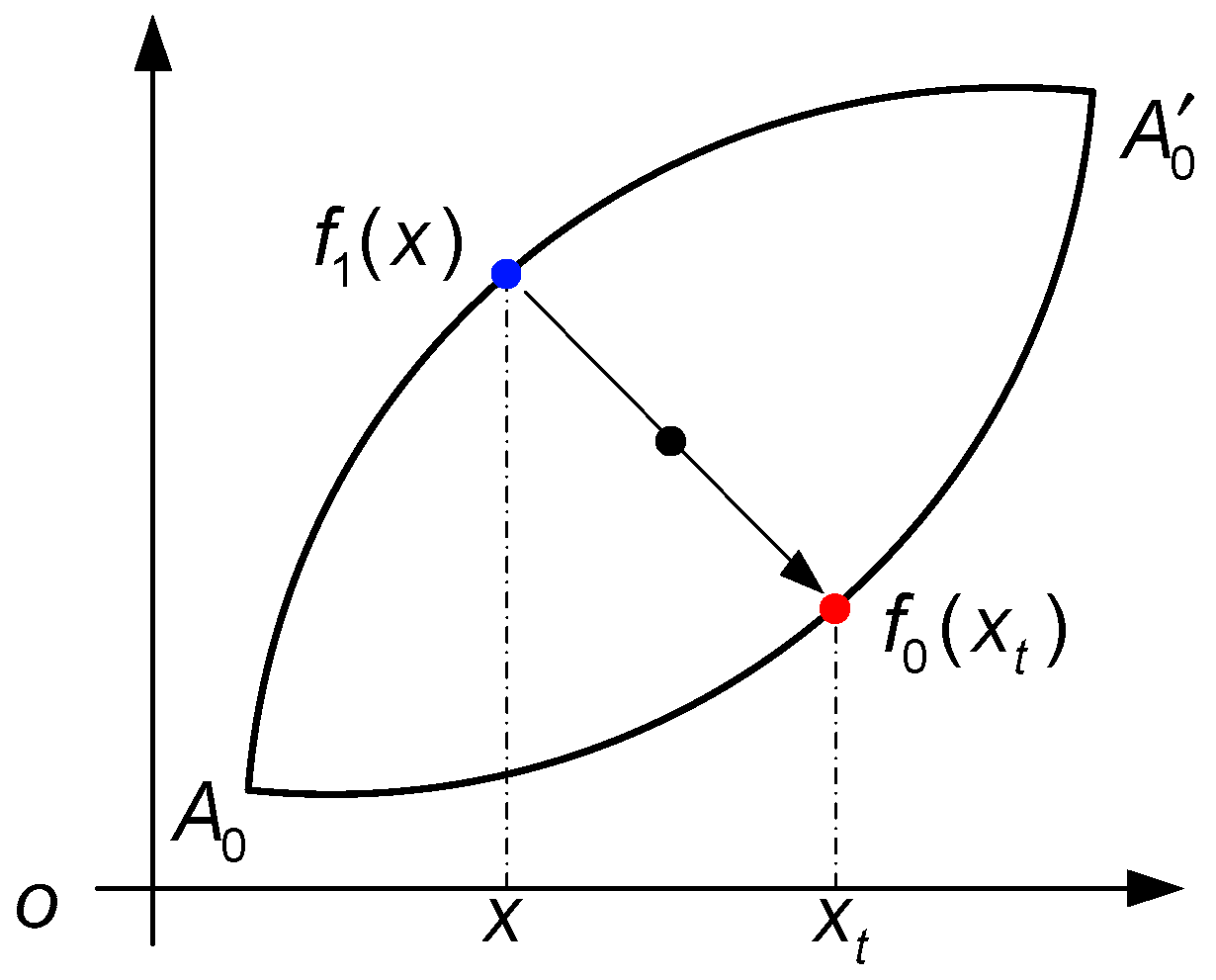
- Any trajectory starting from a turning point is uniquely determined by the coordinates of this point. For example, the turning point in Figure 1b is the starting point of curve , as we will see in the next that the function of can be uniquely described by and .
- If any point on the trajectory, as shown in Figure 1c, becomes a new turning point, then the trajectory leads back to the previous turning point . In other words, any hysteresis loop is closed.
- If the trajectory moving along curve is continued beyond , then it coincides with the continuation of curve as if hysteresis loop did not exist, as shown in Figure 1d.In addition to the above three rules, a fourth rule can be given for symmetric hysteresis.
- The hysteresis loops of symmetric hysteresis are centrally symmetric.
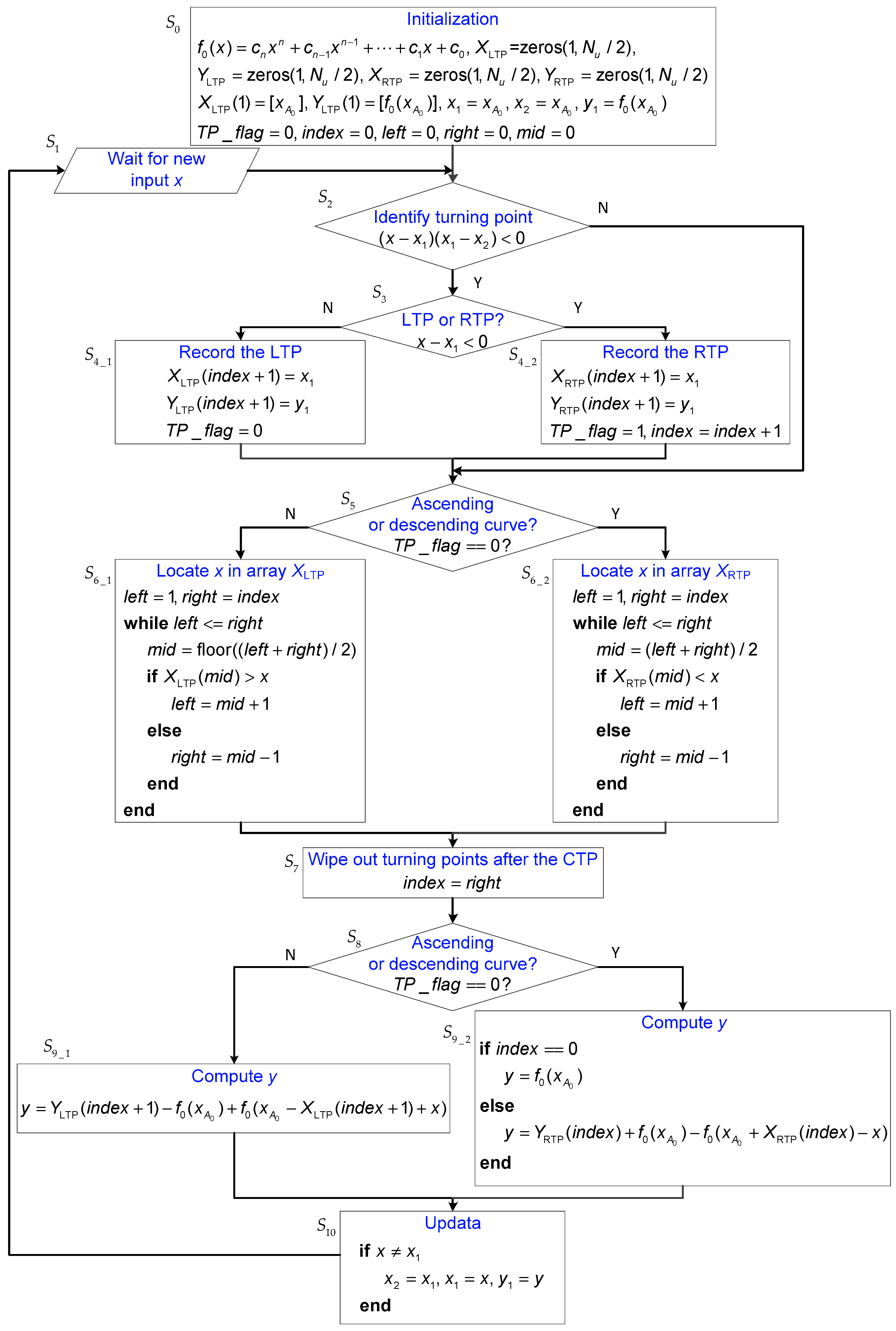
- As the recorders of the movement history, all the turning points should be identified and recorded.
- If the trajectory surpasses previous turning point , it will be transferred to the previous curve . Point and its previous point should be wiped out since they are of no use to describe the future trajectory.
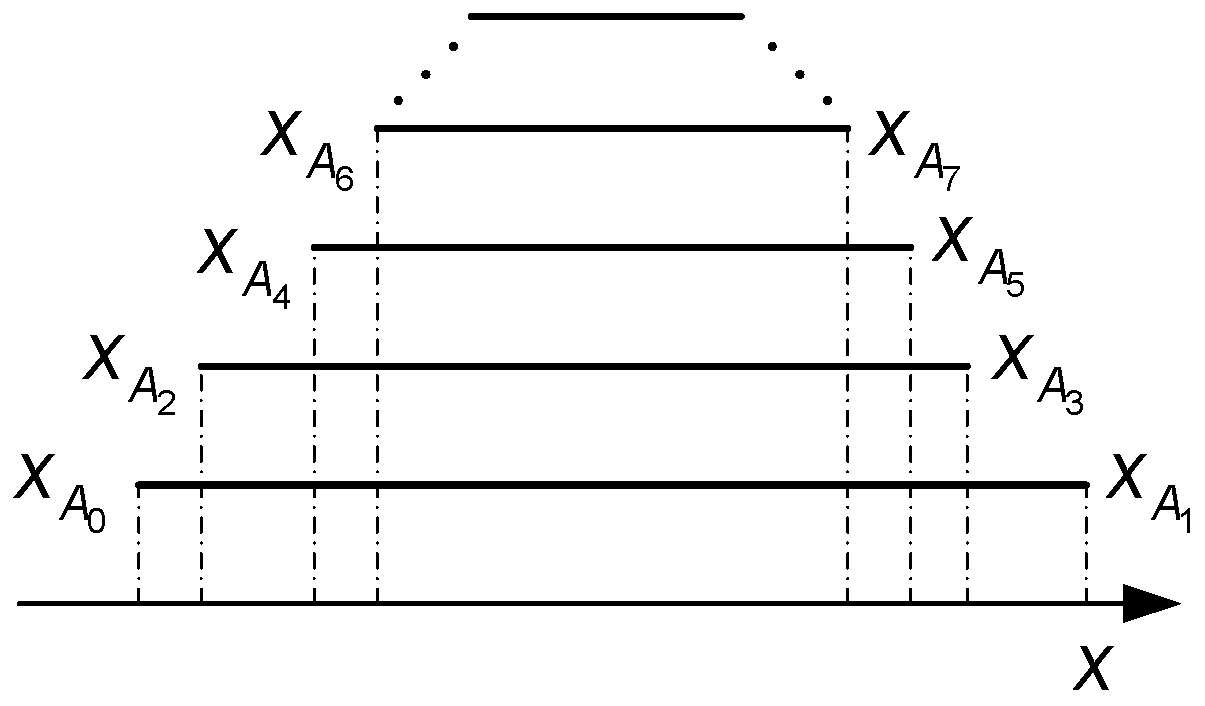
- The domain range of the curve described by Equation (6) is decreasing with , which means that
- The trajectory at any time instant must be on one of the curves described by Equation (6), namely the current curve. If the current curve is determined, the trajectory can then be described. In fact, this curve can be determined by finding the minimum domain that contains the input value among the existing curves. Mathematically, we havewhere is the domain of the current curve, represents the length of , and .
- If is odd, the curve described by Equation (6) is a descending curve, and it is an ascending curve when is even.
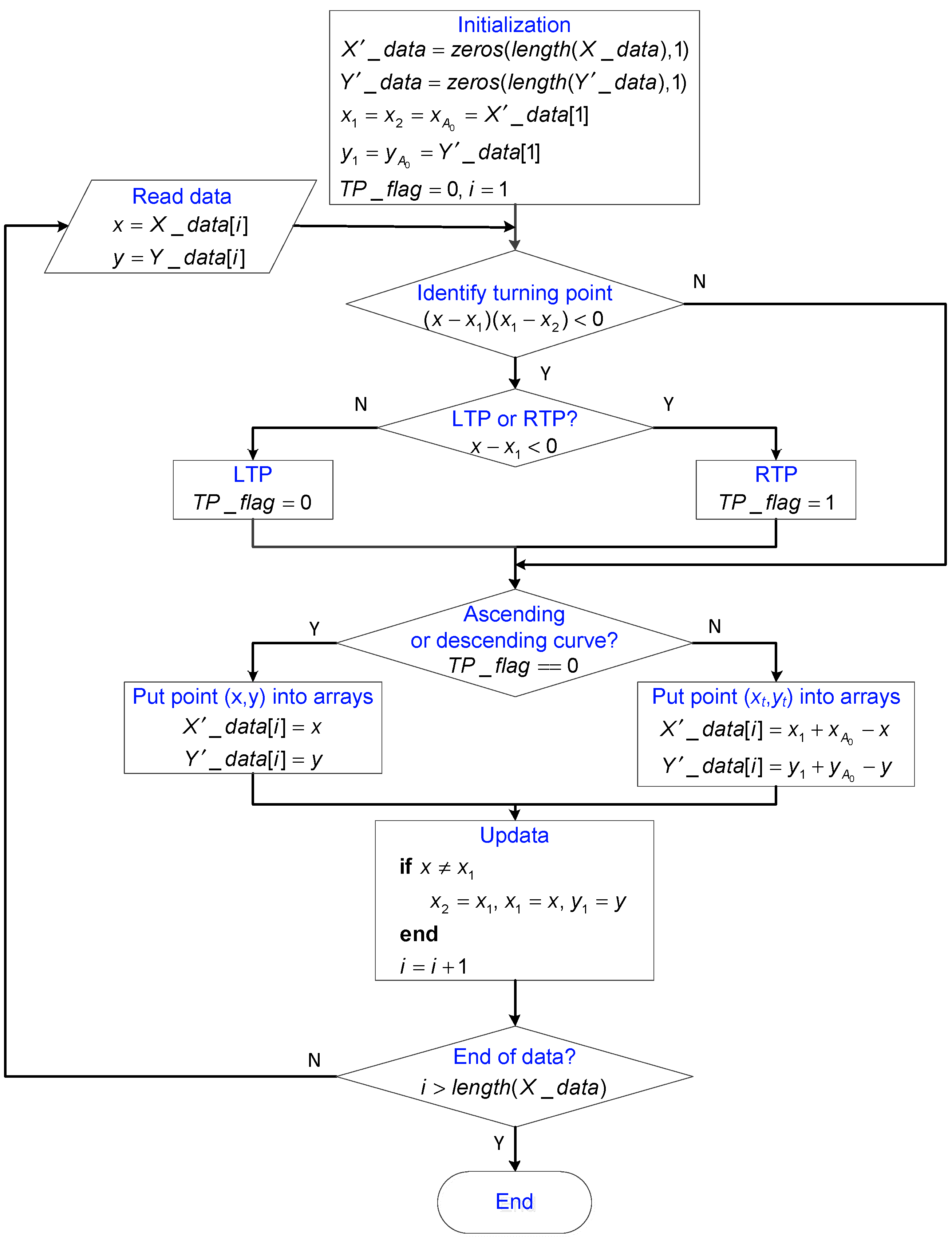
2.2. Algorithm and Complex Analysis
2.3. Parameter Identification
2.4. Relationship with the PI Model
3. Simulations and Experiments
3.1. HIL Simulations
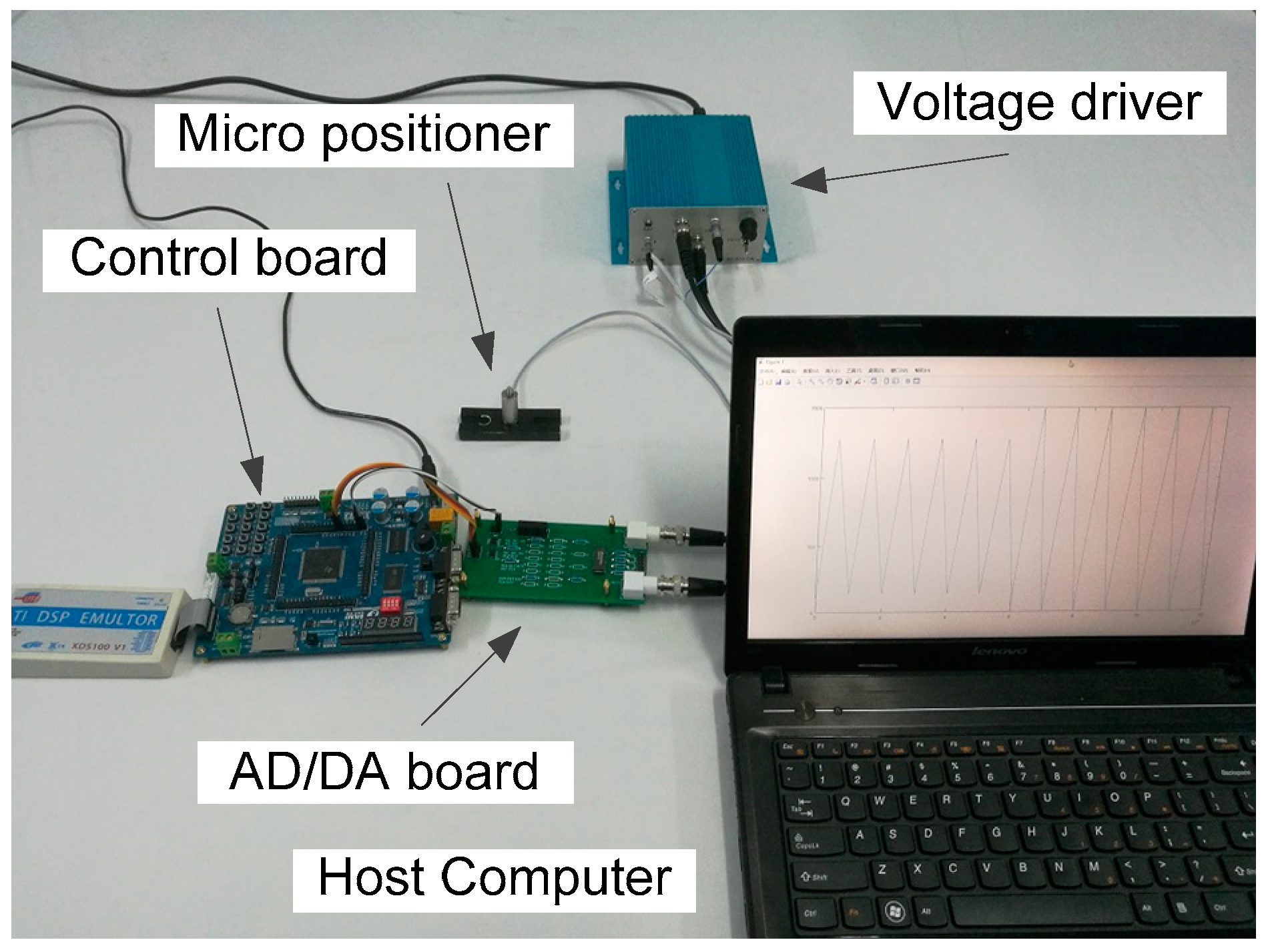
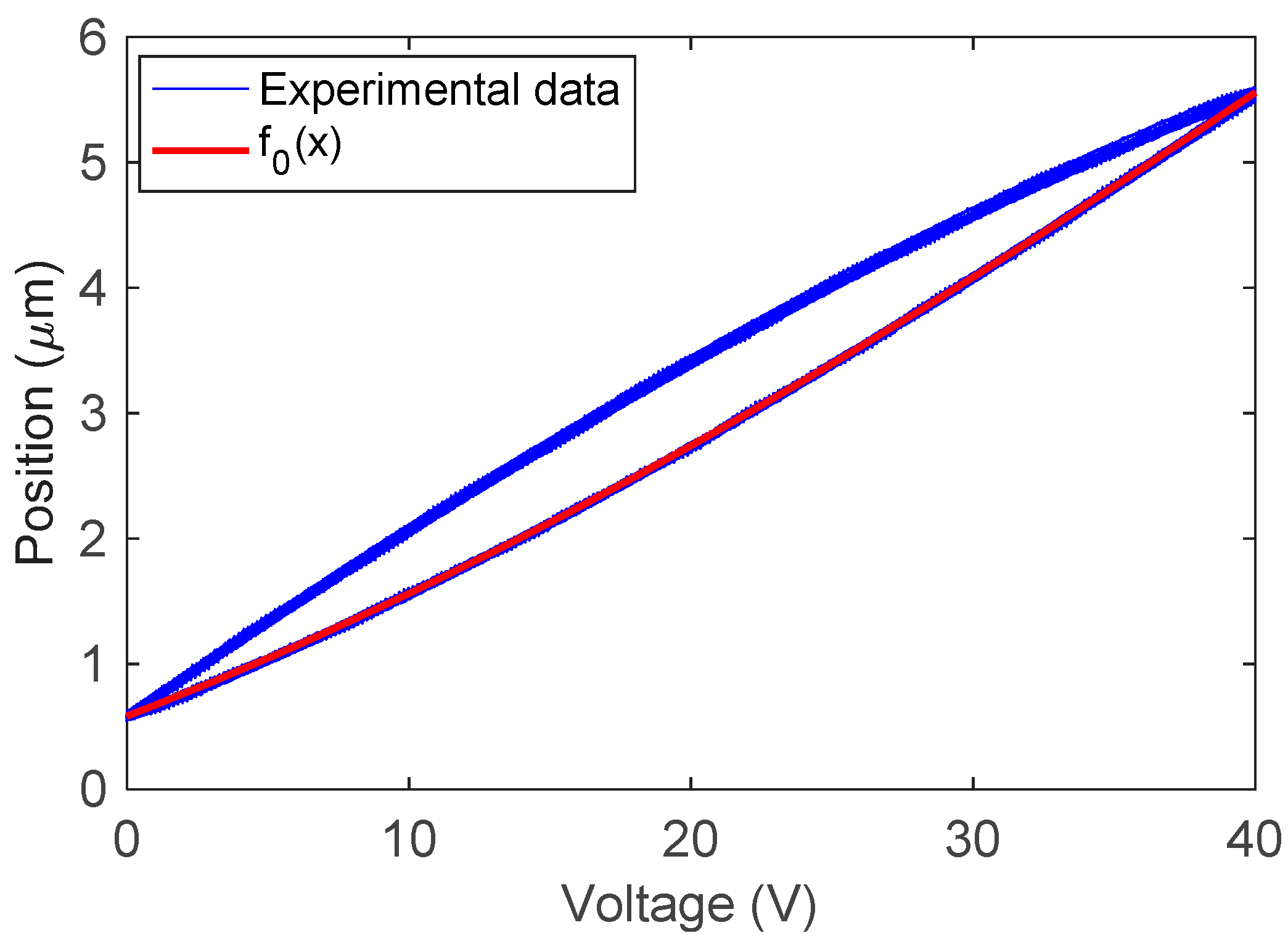
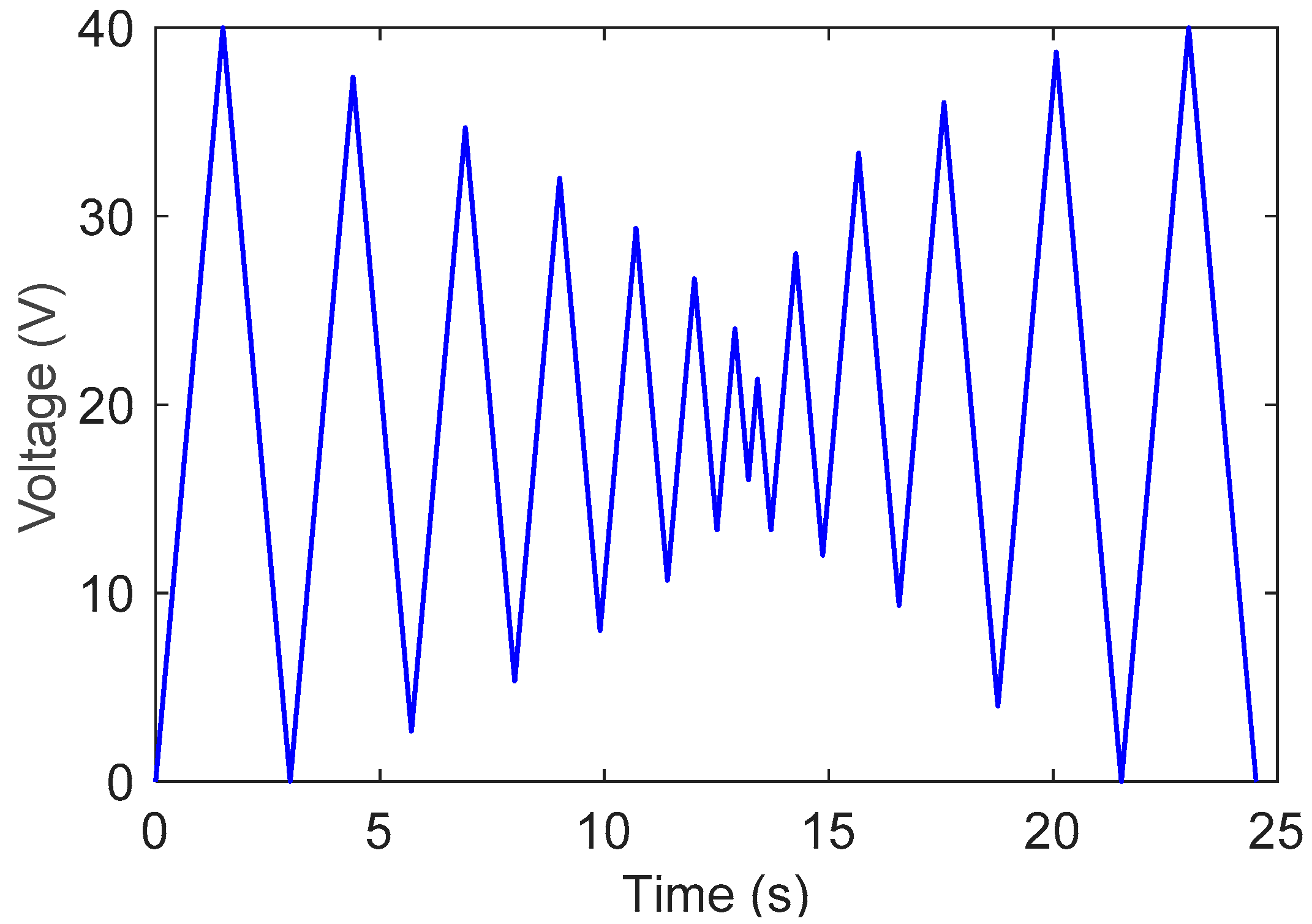
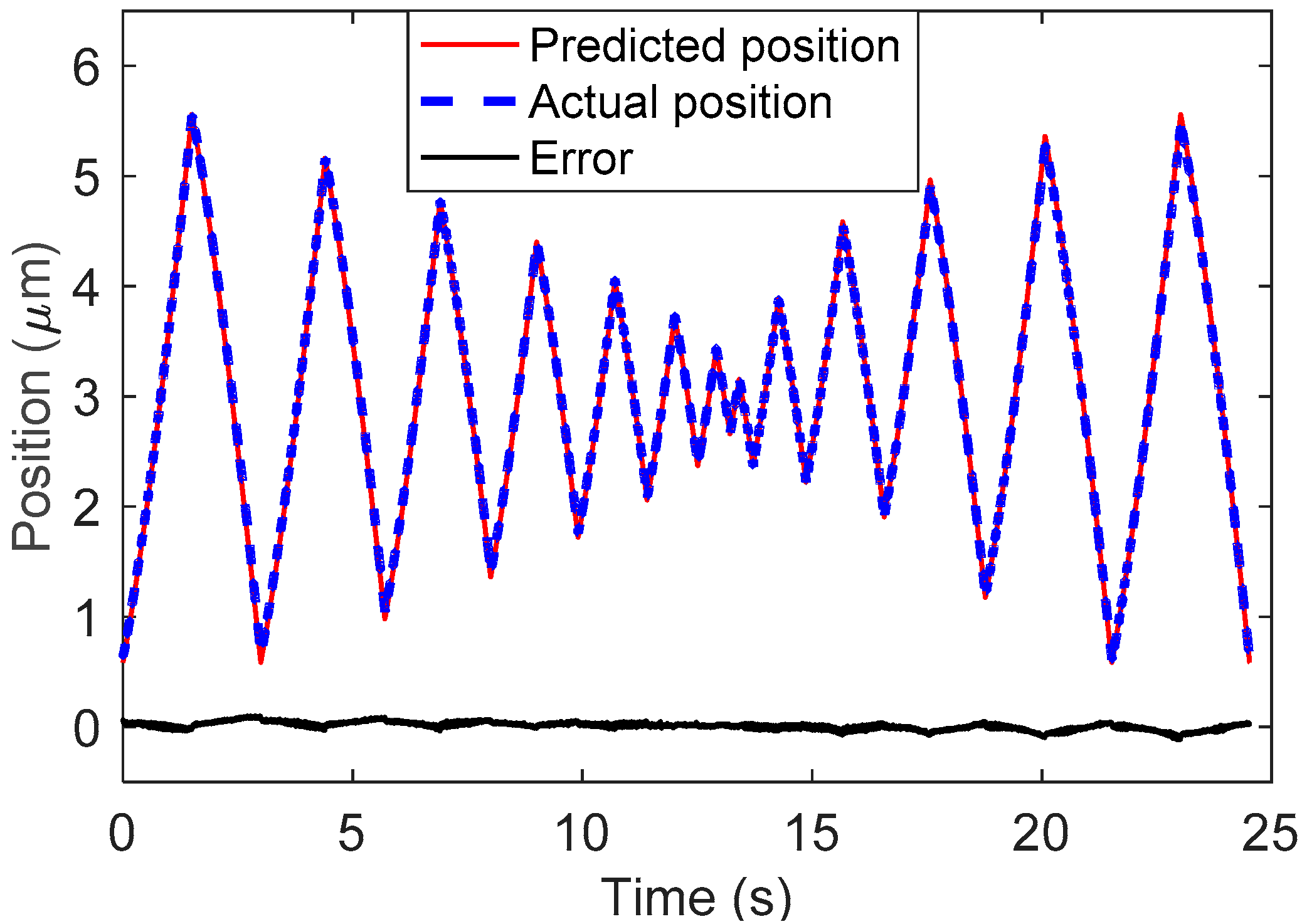
3.2. Experiments
3.3. Discussions
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Mayergoyz, I.D. Mathematical models of hysteresis. Phys. Rev. Lett. 1986, 56, 1518–1521. [Google Scholar] [CrossRef]
- Zirka, S.E.; Moroz, Y.I. Hysteresis modeling based on similarity. IEEE Trans. Magn. 1999, 35, 2090–2096. [Google Scholar] [CrossRef]
- Hassani, V.; Tjahjowidodo, T.; Do, T.N. A survey on hysteresis modeling, identification and control. Mech. Syst. Signal Process. 2014, 49, 209–233. [Google Scholar] [CrossRef]
- Goldfarb, M.; Celanovic, N. Modeling piezoelectric stack actuators for control of micromanipulation. IEEE Control Syst. 1997, 17, 69–79. [Google Scholar]
- Chen, H.Y.; Liang, J.W. Model-Free adaptive sensing and control for a piezoelectrically actuated system. Sensors 2010, 10, 10545–10559. [Google Scholar] [CrossRef]
- Liu, C.; Guo, Y.L. Modeling and positioning of a PZT precision drive system. Sensors 2017, 17, 2577. [Google Scholar] [CrossRef]
- Tan, X.; Baras, J.S. Modeling and control of hysteresis in magnetostrictive actuators. Automatica 2004, 40, 1469–1480. [Google Scholar] [CrossRef]
- Zhang, J.; Iyer, K.; Simeonov, A.; Yip, M.C. Modeling and inverse compensation of hysteresis in supercoiled polymer artificial muscles. IEEE Robot. Autom. Lett. 2017, 2, 773–780. [Google Scholar] [CrossRef]
- Xu, Q. Identification and compensation of piezoelectric hysteresis without modeling hysteresis inverse. IEEE Trans. Ind. Electron. 2013, 60, 3927–3937. [Google Scholar] [CrossRef]
- Rakotondrabe, M. Bouc-Wen modeling and inverse multiplicative structure to compensate hysteresis nonlinearity in piezoelectric actuators. IEEE Trans. Autom. Sci. Eng. 2011, 8, 428–431. [Google Scholar] [CrossRef]
- Xu, Q.; Tan, K.K. Advanced Control of Piezoelectric Micro-/Nano-Positioning Systems; Springer: Cham, Switzerland, 2016; pp. 36–67. [Google Scholar]
- Xiao, S.; Li, Y. Modeling and high dynamic compensating the rate-dependent hysteresis of piezoelectric actuators via a novel modified inverse Preisach model. IEEE Trans. Control Syst. Technol. 2013, 21, 1549–1557. [Google Scholar] [CrossRef]
- Kuhnen, K. Modeling, identification and compensation of complex hysteretic nonlinearities: A modified Prandtl-Ishlinskii approach. Eur. J. Control 2003, 9, 407–418. [Google Scholar] [CrossRef]
- Li, Z.; Su, C.; Chai, T. Compensation of hysteresis nonlinearity in magnetostrictive actuators with inverse multiplicative structure for Preisach model. IEEE Trans. Autom. Sci. Eng. 2014, 11, 613–619. [Google Scholar] [CrossRef]
- Nguyen, P.; Choi, S.; Song, B. A new approach to hysteresis modeling for a piezoelectric actuator using Preisach model and recursive method with an application to open-loop position tracking control. Sens. Actuators A Phys. 2018, 270, 136–152. [Google Scholar] [CrossRef]
- Oliveri, A.; Stellino, F.; Caluori, G.; Parodi, M.; Storace, M. Open-loop compensation of hysteresis and creep through a power-law circuit model. IEEE Trans. Circuits Syst. I Reg. Papers 2016, 63, 413–422. [Google Scholar] [CrossRef]
- Krejčí, P.; Al Janaideh, M.; Deasy, F. Inversion of hysteresis and creep operators. Physica B 2012, 407, 1354–1356. [Google Scholar] [CrossRef]
- Al Janaideh, M.; Krejčí, P. Inverse rate-dependent Prandtl-Ishlinskii model for feedforward compensation of hysteresis in a piezomicropositioning actuator. IEEE/ASME Trans. Mechatron. 2013, 18, 1498–1507. [Google Scholar] [CrossRef]
- Wang, Z.; Zhang, Z.; Mao, J.; Zhou, K. A Hammerstein-based model for rate-dependent hysteresis in piezoelectric actuator. In Proceedings of the 24th Chinese Control and Decision Conference, Taiyuan, China, 23–25 May 2012; pp. 1391–1396. [Google Scholar]
- Gu, G.; Yang, M.; Zhu, L. Real-time inverse hysteresis compensation of piezoelectric actuators with a modified Prandtl-Ishlinskii model. Rev. Sci. Instum. 2012, 83, 065106. [Google Scholar] [CrossRef]
- Gu, G.; Zhu, L.; Su, C. Modeling and compensation of asymmetric hysteresis nonlinearity for piezoceramic actuators with a modified Prandtl-Ishlinskii model. IEEE Trans. Ind. Electron. 2014, 61, 1583–1595. [Google Scholar] [CrossRef]
- Ang, W.T.; Khosla, P.K.; Riviere, C.N. Feedforward controller with inverse rate-dependent model for piezoelectric actuators in trajectory-tracking applications. IEEE/ASME Trans. Mechatron. 2007, 12, 134–142. [Google Scholar] [CrossRef]
- Qin, Y.; Tian, Y.; Zhang, D.; Shirinzadeh, B.; Fatikow, S. A novel direct inverse modeling approach for hysteresis compensation of piezoelectric actuator in feedforward applications. IEEE/ASME Trans. Mechatron. 2013, 18, 981–989. [Google Scholar] [CrossRef]
- Qin, Y.; Zhao, X.; Zhou, L. Modeling and identification of the rate-dependent hysteresis of piezoelectric actuator using a modified Prandtl-Ishlinskii model. Micromachines 2017, 8, 114. [Google Scholar] [CrossRef]
- Zirka, S.E.; Moroz, Y.I. Hysteresis modeling based on transplantation. IEEE Trans. Magn. 1995, 31, 3509–3511. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| i | Weight | Threshold | i | Weight | Threshold |
|---|---|---|---|---|---|
| 1 | 0.0789 | 0 | 6 | 0.2001 | 0.5 |
| 2 | 0.2268 | 0.1 | 7 | 0.2000 | 0.6 |
| 3 | 0.1928 | 0.2 | 8 | 0.2000 | 0.7 |
| 4 | 0.2019 | 0.3 | 9 | 0.1999 | 0.8 |
| 5 | 0.1995 | 0.4 | 10 | 0.2005 | 0.9 |
| Resolution | 12-bit | 16-bit | 18-bit | 24-bit |
|---|---|---|---|---|
| Memory Size | 16 KB | 256 KB | 1.5 MB | 96 MB |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cao, K.; Li, R. Modeling of Rate-Independent and Symmetric Hysteresis Based on Madelung’s Rules. Sensors 2019, 19, 352. https://doi.org/10.3390/s19020352
Cao K, Li R. Modeling of Rate-Independent and Symmetric Hysteresis Based on Madelung’s Rules. Sensors. 2019; 19(2):352. https://doi.org/10.3390/s19020352
Chicago/Turabian StyleCao, Kairui, and Rui Li. 2019. "Modeling of Rate-Independent and Symmetric Hysteresis Based on Madelung’s Rules" Sensors 19, no. 2: 352. https://doi.org/10.3390/s19020352
APA StyleCao, K., & Li, R. (2019). Modeling of Rate-Independent and Symmetric Hysteresis Based on Madelung’s Rules. Sensors, 19(2), 352. https://doi.org/10.3390/s19020352