1. Introduction
In the past decades, polarimetric features, which can be described by a second order backscattering matrix (BSM) of the target, have been widely used in various fields, such as terrain observation, disaster surveillance and atmospheric remote sensing [
1,
2,
3,
4]. In order to accurately obtain the BSM, two fully polarimetric measurement schemes, called alternate polarimetric measurement (APM) and simultaneous polarimetric measurement (SPM) schemes have been widely investigated since the 1980s [
5,
6,
7,
8].
In alternate mode, the transmitted polarization states are switched alternately between horizontal (H) and vertical (V) polarizations while both polarizations are received simultaneously on reception. The estimations of BSM for targets with high velocity, such as satellites and spacecrafts, are inaccurate in alternate mode due to the change of their polarimetric features during the switch on transmission phase. In contrast, in simultaneous mode, the two orthogonal polarization states are transmitted and received simultaneously. Thus, the BSM of the targets can be retrieved within one pulse recurrent time (PRT). In this case, the limitation caused due to the change of the transmitted polarization states can be overcome. However, the transmitted signals must be orthogonal in order to reduce the interference caused by simultaneous transmission and reception, which is usually evaluated by the cross-correlation properties of the waveforms [
9]. Numerous researchers have focused on this problem and attempted to design waveforms with good orthogonal properties. In [
10], Babur et al. proposed a method for designing the quasi-orthogonal Frequency Modulated Continuous Waveforms (FMCW) and analyzed its application in multiple-input multiple-output (MIMO) radar. In addition, Liu [
11] exploited the genetic algorithm to obtain the coding sequences with good correlation properties for MIMO radar applications. However, the above-mentioned algorithms have not considered the effect of the Doppler shift on the properties of the waveforms.
Designing waveforms with good autocorrelation properties is also of great importance in applications of polarimetric radar. In general, the peak of the side-lobes is related to the probability of false alarm. At the same time, if the peak of the side-lobes is high, the return of the weak targets will be masked by that of the targets with large Radar Cross Section (RCS) in nearby range cells. Therefore, the peak of the side-lobes should be as low as possible in order to improve the detection performance of weak targets. In general, there exist two major merits to measure the autocorrelation property of the waveforms that are Integrated Side-lobes Level (ISL) and Peak Side-lobes Level (PSL). For the minimization of PSL, Deng [
12] designed unimodular sequences (in the rest of the article, sequences are used to denote polyphase sequences) by using the simulated annealing algorithm and analyzed their performance in applications of orthogonal netted radar. In [
13], Song et al. discussed the problem of minimizing the
norm on the side-lobes of autocorrelation function. They approached the minimization of PSL by increasing the value of
p. However, their algorithm named “monotonic minimizer (MM) for
-metric” lacks the ability to suppress a specified part of the autocorrelation function. It should be pointed out that, in some radar applications, the maximum difference between the arrival time of the interest sequences is smaller than the duration of the emitted sequences [
13,
14,
15,
16]. Hence, only the partial side-lobes of the correlation function are needed to be low. In addition, Esmaeili-Najafabadi et al. [
14] proposed a series of cyclic algorithms (CA), including PSL Minimization Quadratic Approach (PMQA), PSL minimization Algorithm where the smallest Rectangular (PMAR), PSL Optimization Cyclic Algorithm (POCA) and Randomized PSL Optimization Cyclic Algorithm (RPOCA), by using the Chebyshev distance and
norm. They addressed the problem of optimizing the specified part of the autocorrelation function. Meanwhile, a set of waveforms with low cross-correlation side-lobes can be obtained by applying chaotic waveforms as the initial sequences in their algorithms. However, these four algorithms lack the ability to suppress the specified side-lobes for the cross-correlation function. For the minimization of ISL, P. Stoica and H. He et al. [
15,
16] proposed a series of cyclic algorithms for unimodular sequences, including CA-pruned (CAP), CA-new (CAN), weighted-CAN (WeCAN) and CA-direct (CAD). In addition to autocorrelation, they minimized the cross-correlation between the generated sequences and optimized the specified part of the correlation (in the rest of the article, correlation is used to denote both auto- and cross-correlation) function. However, the practical convergence rate of these algorithms becomes slow with the increase in the length of the sequences and they lack the ability to suppress all the side-lobes of the correlation function.
Furthermore, all of the above-mentioned algorithms have been proposed for the applications of static or low-velocity targets. For moving targets, Doppler loss occurs at the matched filters on reception [
17]. It has been pointed out in [
18] that the phase-coded sequences are quite sensitive to the Doppler shift. In other words, even if the velocity of the target is low, the output of the matched filters will still significantly deteriorate compared with the processing results of the static target’s echoes. In a recent work, an efficient gradient algorithm has been proposed to optimize the autocorrelation property of the sequences in different Doppler shift [
19]. However, this algorithm cannot optimize the cross-correlation properties of the sequences, which is important for the measurement of simultaneous polarimetric radar as mentioned before. Cui et al. [
20] proposed an accelerated iterative sequential optimization (AISO) algorithm that can minimize the ISL of the autocorrelation function in different Doppler shift of interest and reduce the computations compared with the algorithm in [
19]. However, the AISO algorithm also does not consider the optimization of the cross-correlation properties of the sequences. In addition, Doppler tolerant complementary code sets are also developed these days because of their potential of making all the autocorrelation side-lobes sum to zero, at least in theory, but the orthogonality of the complementary sequences are not considered in most articles [
21,
22]. In addition, the Doppler frequency in [
19,
20] is considered to be a constant in one PRT, which means that the target is assumed to be in a uniform rectilinear motion state. However, the instantaneous acceleration of maneuvering targets, such as missile and spacecraft, can reach 10
g (
g is the gravitational acceleration). At this moment, the Doppler frequency is not a constant in one PRT, and the Doppler phase model should be modified to match the movement of the targets.
The above-mentioned three metrics are usually regarded as the measures of the sequences used in fully polarimetric radars. The low cross-correlation side-lobes improve the estimation accuracy of BSM, the low autocorrelation side-lobes increase the detection performance of weak targets and the high Doppler tolerance enhances the adaptability of the waveforms to the movement of targets. In most studies, this design problem has been usually reformulated as an optimization of a complex matrix [
12,
13,
14,
15,
16,
17,
23]. The requirements of Doppler tolerance, autocorrelation and cross-correlation properties make the optimization problem difficult. This paper extends the approaches in [
19] and proposes new cyclic algorithms for designing sequences with good correlation properties and Doppler tolerance. The rest of this paper is organized as follows:
Section 2 presents the problem formulation; in
Section 3, the Cyclic Algorithm-Gradient I (CAGI) and Cyclic Algorithm-Gradient II (CAGII) algorithms are introduced to design the sequences with good properties; the numerical examples are provided in
Section 4 to verify the performance of the proposed algorithms, followed by the conclusions in
Section 5.
: Boldface uppercase and lowercase letters are used to represent matrices and vectors, respectively. See
Table 1 for other notations used in this paper.
2. Simultaneous Polarimetric Measurement and Doppler Analysis
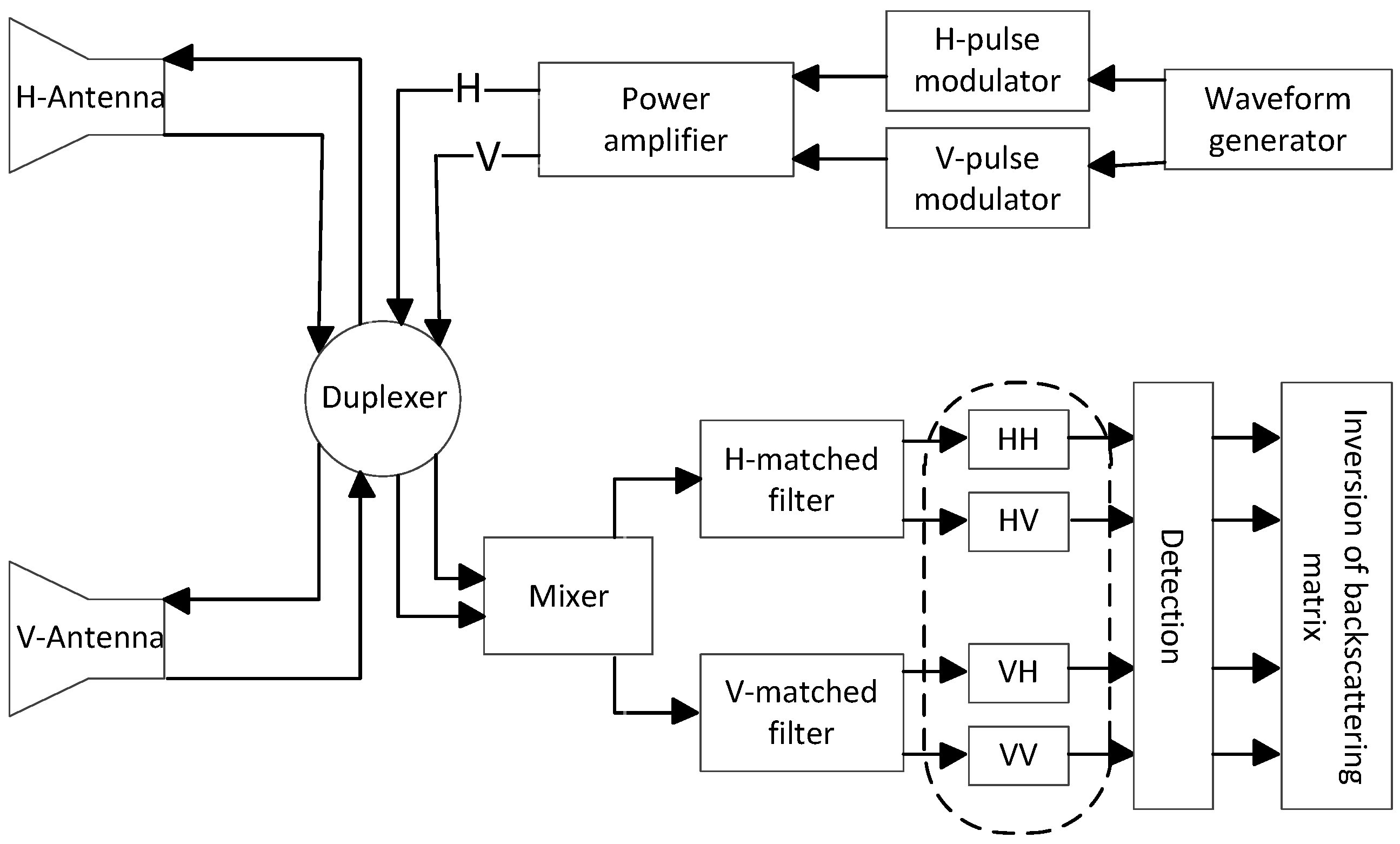
The simplified signal processing flow chart of the SPM is depicted in
Figure 1. Let
and
represent the simultaneously transmitted signals via two orthogonal polarization channels. To facilitate the discussion, the transmitted signals can be given in vector form as:
For a point target, the received signals are the Doppler-shifted and time-delayed version of the transmitted signals. Thus, they can be expressed as [
24]:
where
and
represent the received signals from the two orthogonal polarization channels, respectively,
is the round-trip propagation delay and
is the Doppler frequency determined by the target velocity and the carrier wavelength.
and
represent the effect of channel, antenna and propagation path on the BSM during the reception and transmission, respectively, and
is the BSM of the target. Processed by the matched filters shown in
Figure 1, the output can be expressed as:
where
The subscripts
denote the H and V polarization channels.
and
represent the matched filters of H and V polarization channels, respectively. When the transmitted signals satisfy the orthogonal condition, i.e.,
then, if
and
are known, all the parameters of the BSM can be estimated accurately. The sequences used for simultaneous polarimetric measurement can be written as:
where
are the sequences to be designed,
can be an arbitrary value between
(in the rest of the article,
p and
q are used to denote H and V),
N is the length of the sequences,
is the time duration of the sub-pulse and
is the envelope function with unit amplitude.
The (aperiodic) cross-correlation function of
and
at lag
k is defined as:
When
, Equation (
9) becomes the autocorrelation function of
. It should be pointed out that, in the real radar system, each code interval has more than one point dependent on a frequency of discretization. This leads to the output of the matched filters to be different from the discrete correlation function
defined in this paper. However, the authors have proved in [
25] that the discrete correlation function
has almost the same properties as the continuous correlation
, where
t is the continuous delay. Therefore, it is reasonable to optimize the discrete correlation function instead of the continuous correlation function to obtain the sequences with good correlation properties. Moreover, the correlation functions of the sequences need to be modified because, when the target moves, the Doppler loss occurs at the matched filters on the receiving end. Here, the radial velocity and the acceleration of the target are assumed to be
and
a, respectively. Under the condition of uniformly accelerated rectilinear motion, the Doppler frequency of the received signals in different times can be written as:
where
is the carrier wavelength. Based on Equation (
10), the Doppler phase shift of the received signals in different times can be written as:
Then, the maximum Doppler phase shift can be obtained as
when
n is equal to
N, and the Doppler frequency is an arithmetic sequence, which means
is a constant. Based on Equations (
10) and (
11), Equation (
9) needs to be modified due to the existence of the Doppler phase shift as follows:












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}