Sensor-Oriented Path Planning for Multiregion Surveillance with a Single Lightweight UAV SAR


Abstract
:1. Introduction
- The SAR-oriented objectives and constraints on the flight path are analyzed in detail, and their mathematical expressions are presented in an image-based configuration space (C-space).
- An image-based pretreatment method is developed to simplify the path planning procedure. By doing so, the path planning problem can be decoupled into two subproblems, i.e., locating the SAR-oriented path segments and designing the UAV-oriented sub-routes. Furthermore, the independent UAV-oriented sub-routes planning can be implemented in parallel to speed up the process.
- A route planning method, named sampling-based sparse A* searching (SSAS) algorithm, is proposed to search near-optimal sub-routes effectively without breaking the constraints. In SSAS, we apply the sampling strategy to avoid the construction of search map, and we apply a bidirectional search scheme to provide the proper heuristic for the route planner.
2. Related Work
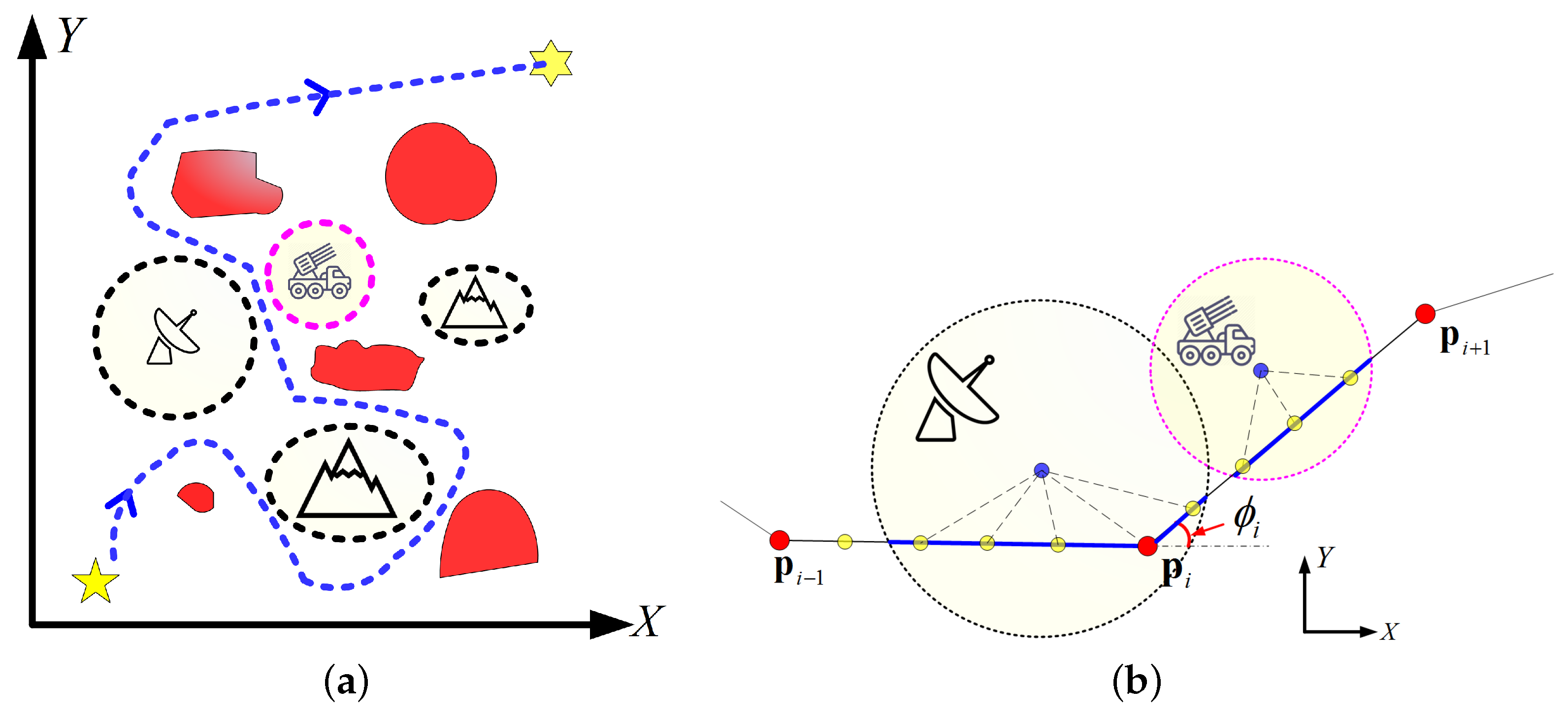
3. Problem Statement
3.1. Problem Modeling
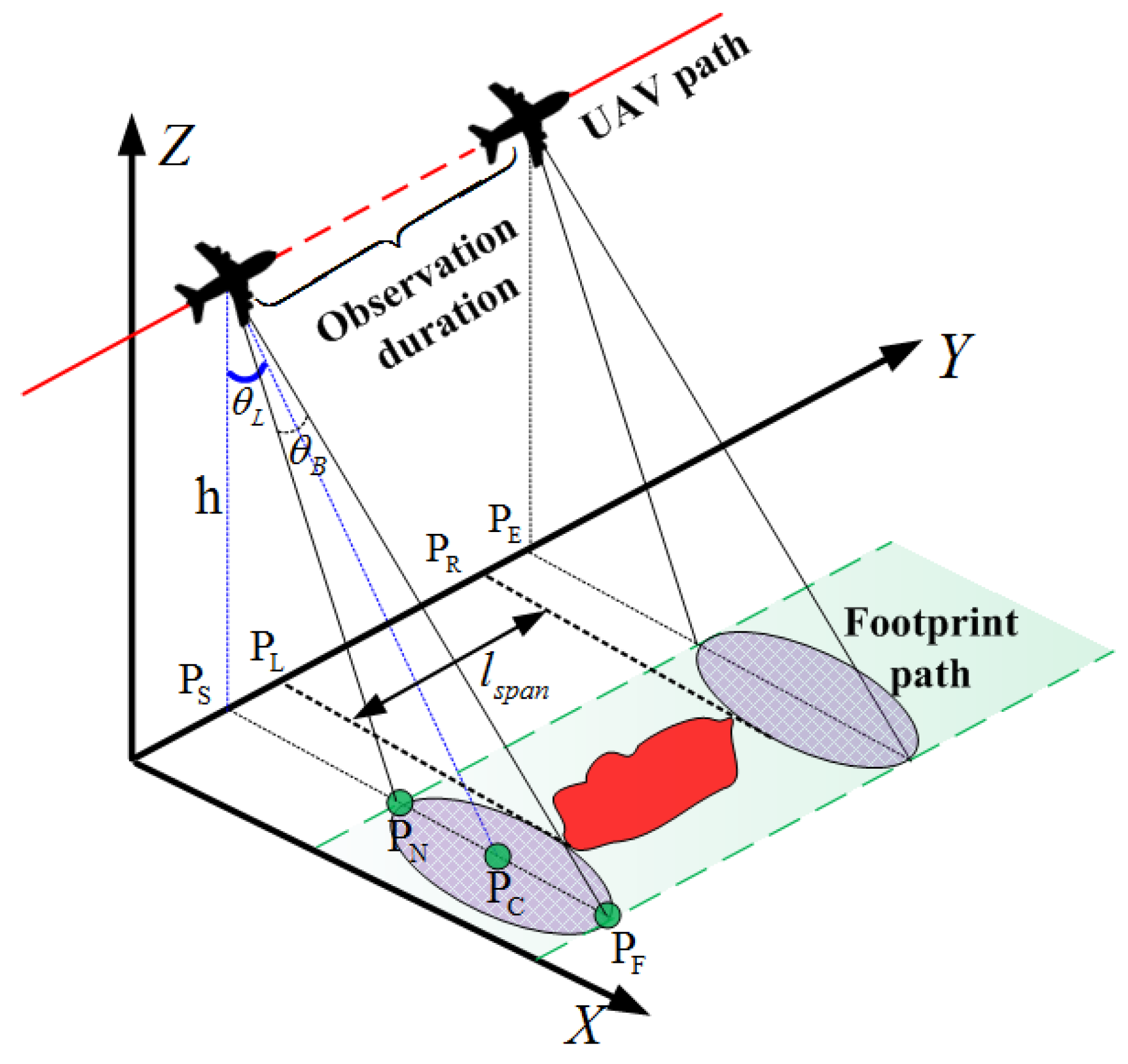
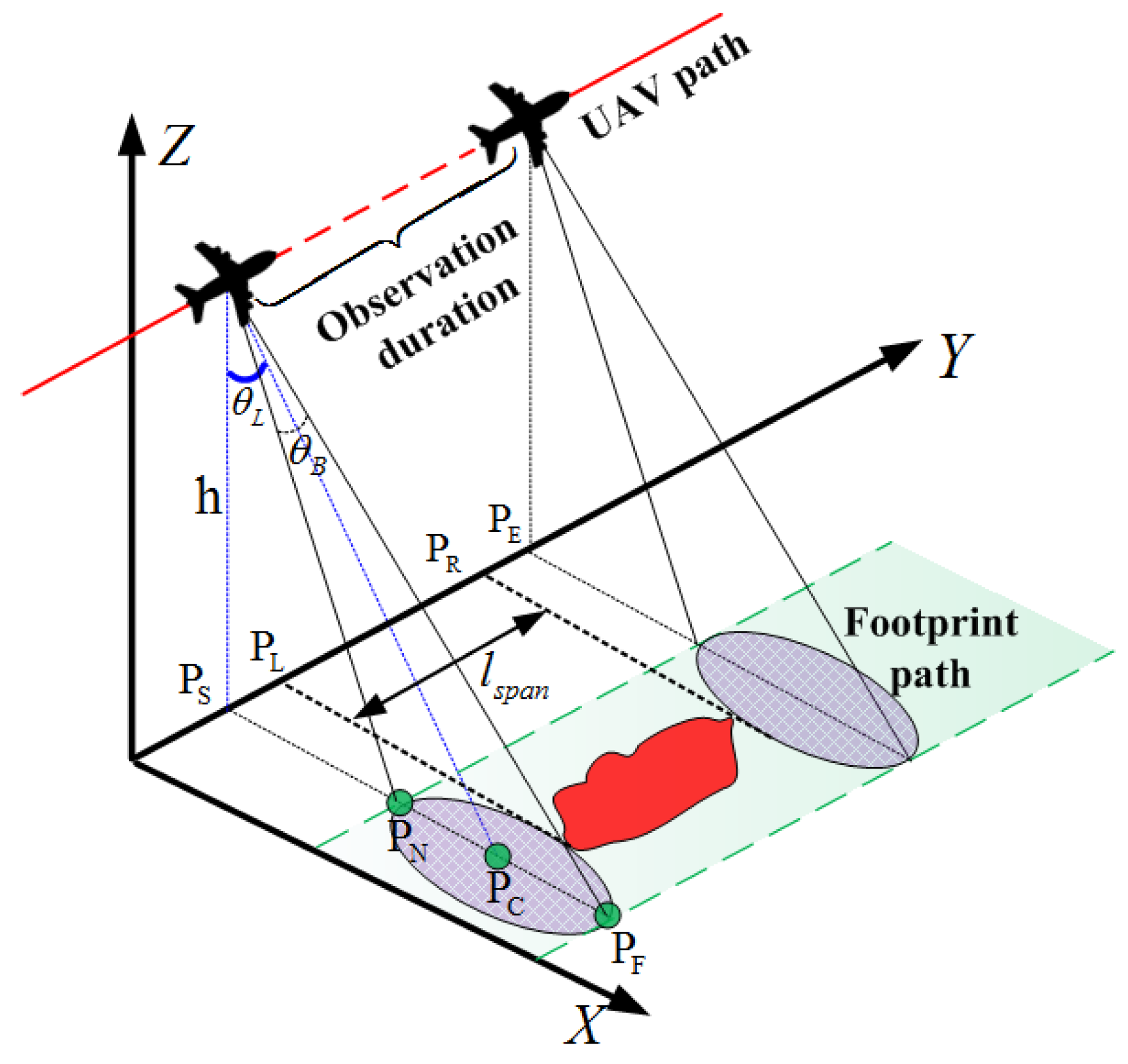
3.2. Constraint Functions
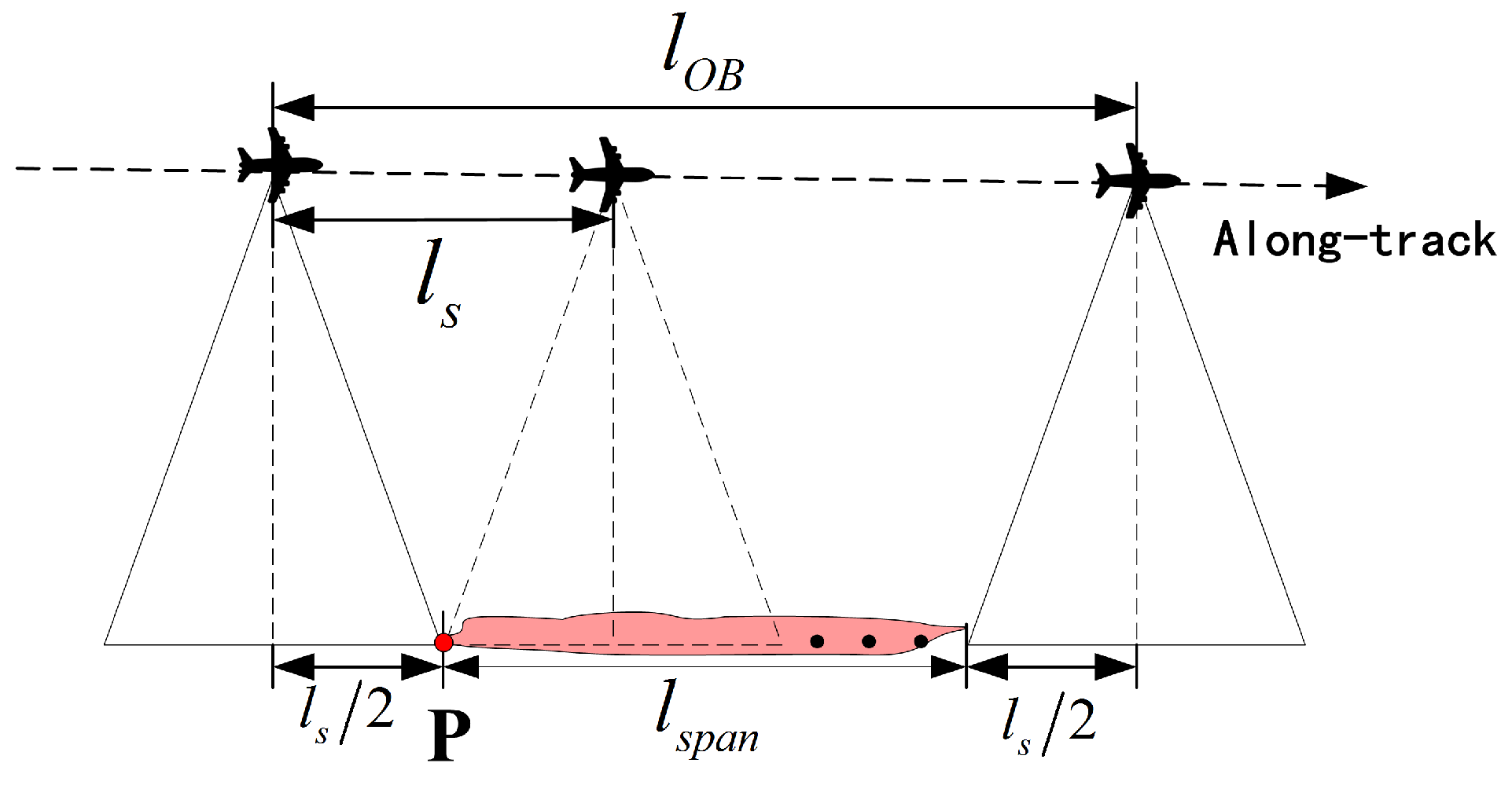
3.2.1. Full-Coverage Observation (SAR-Oriented)
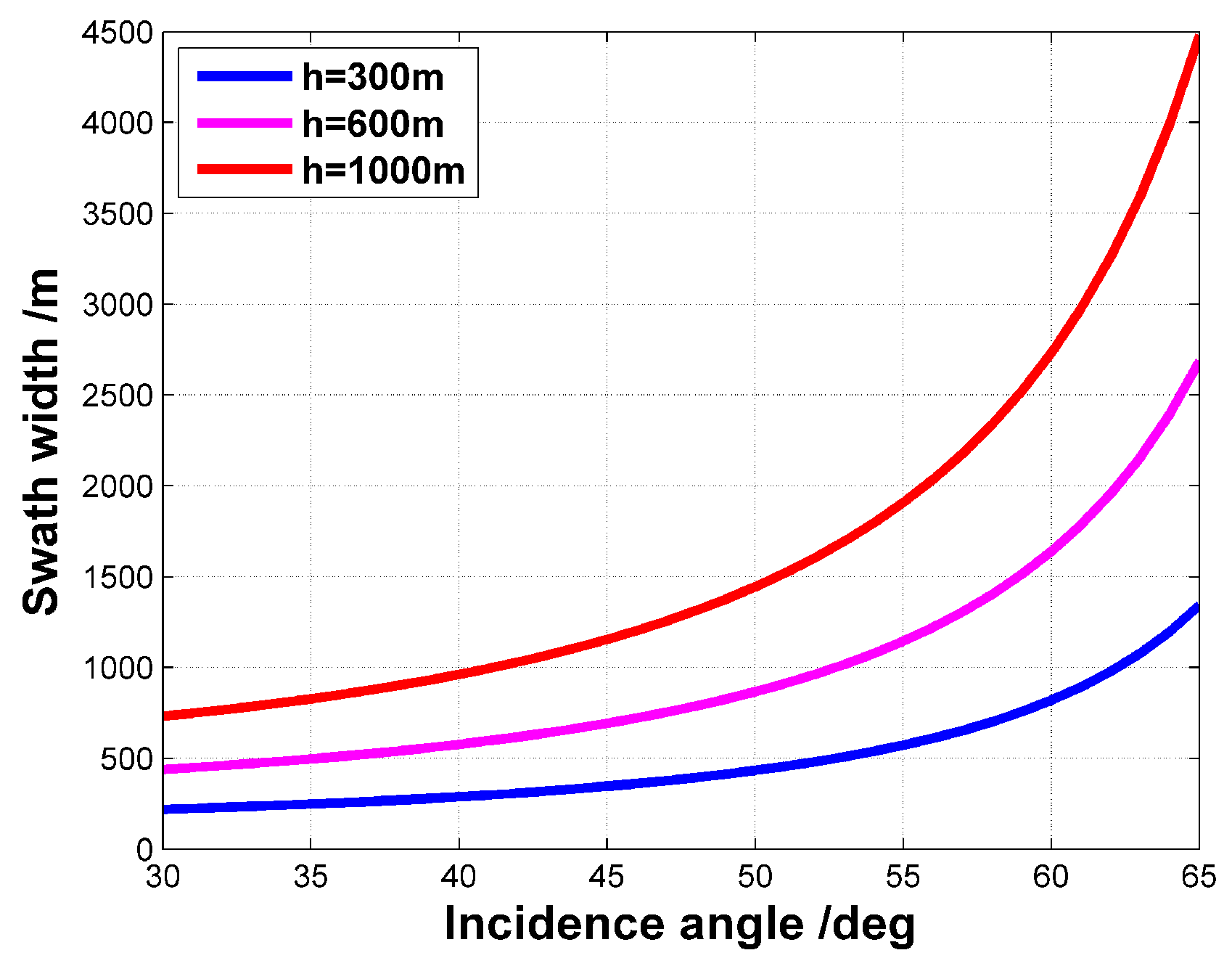
3.2.2. Full-Resolution Observation (SAR-oriented)
3.2.3. Maximum Turning Angle (UAV-Oriented)
3.2.4. Limited Map (UAV-Oriented)
3.3. Objective Functions
3.3.1. Minimize Path Length (UAV-Oriented)
3.3.2. Minimize the Risk of Kill (UAV-Oriented)
3.3.3. Minimize the Risk of Radar Detection (UAV-Oriented)
4. Proposed Path Planner
| Algorithm 1 Overview of the Proposed Path Planner. |
|
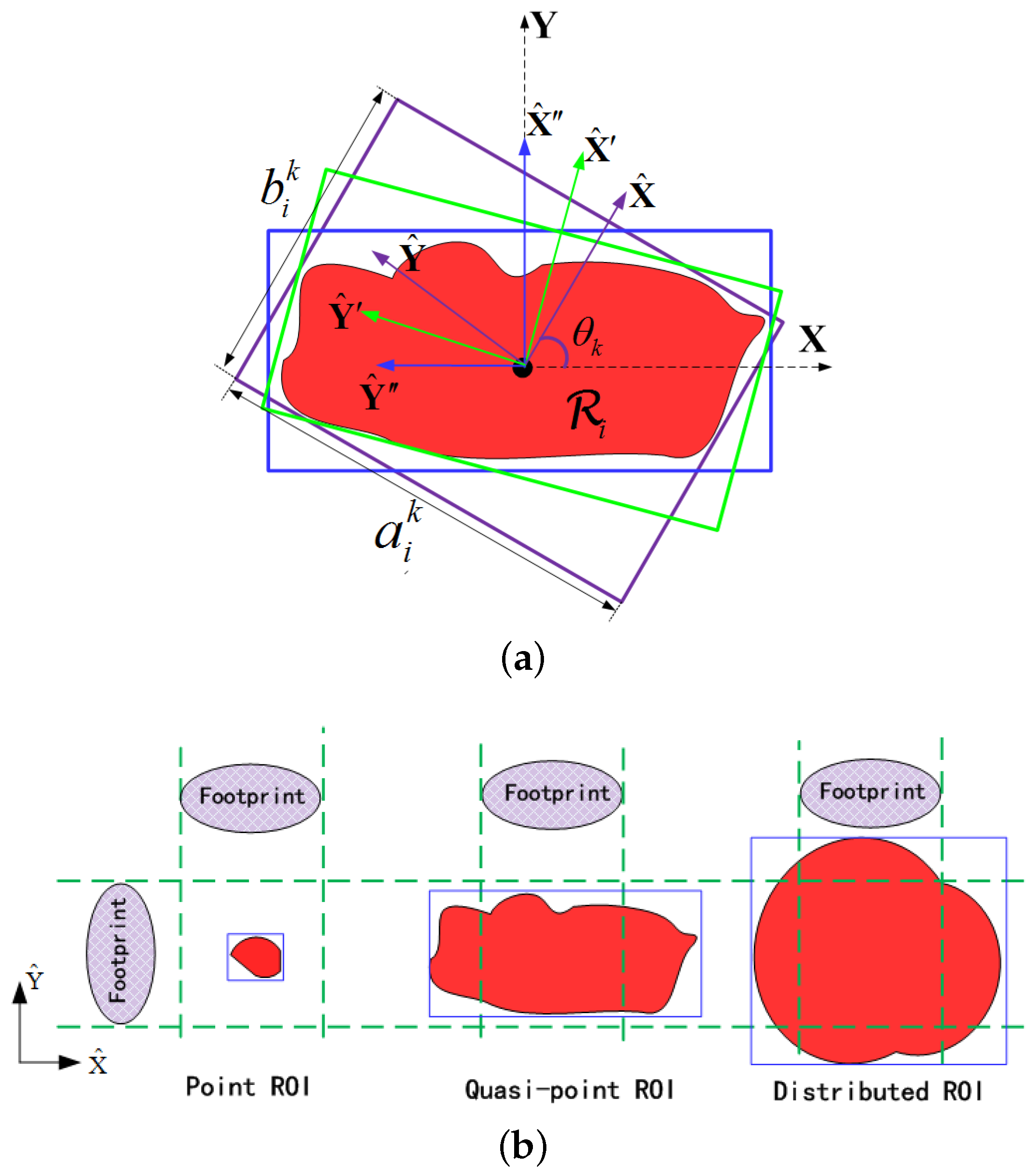
4.1. Image-Based C-Space Formation
4.2. Collection Neighborhoods Localization
4.2.1. ROI Classification via Contour Analysis
| Algorithm 2 ROI Classification. |
| Input: A symbolic image with ROIs labeled by sequential integers. Output: The category of each ROI in the map. Begin:
|
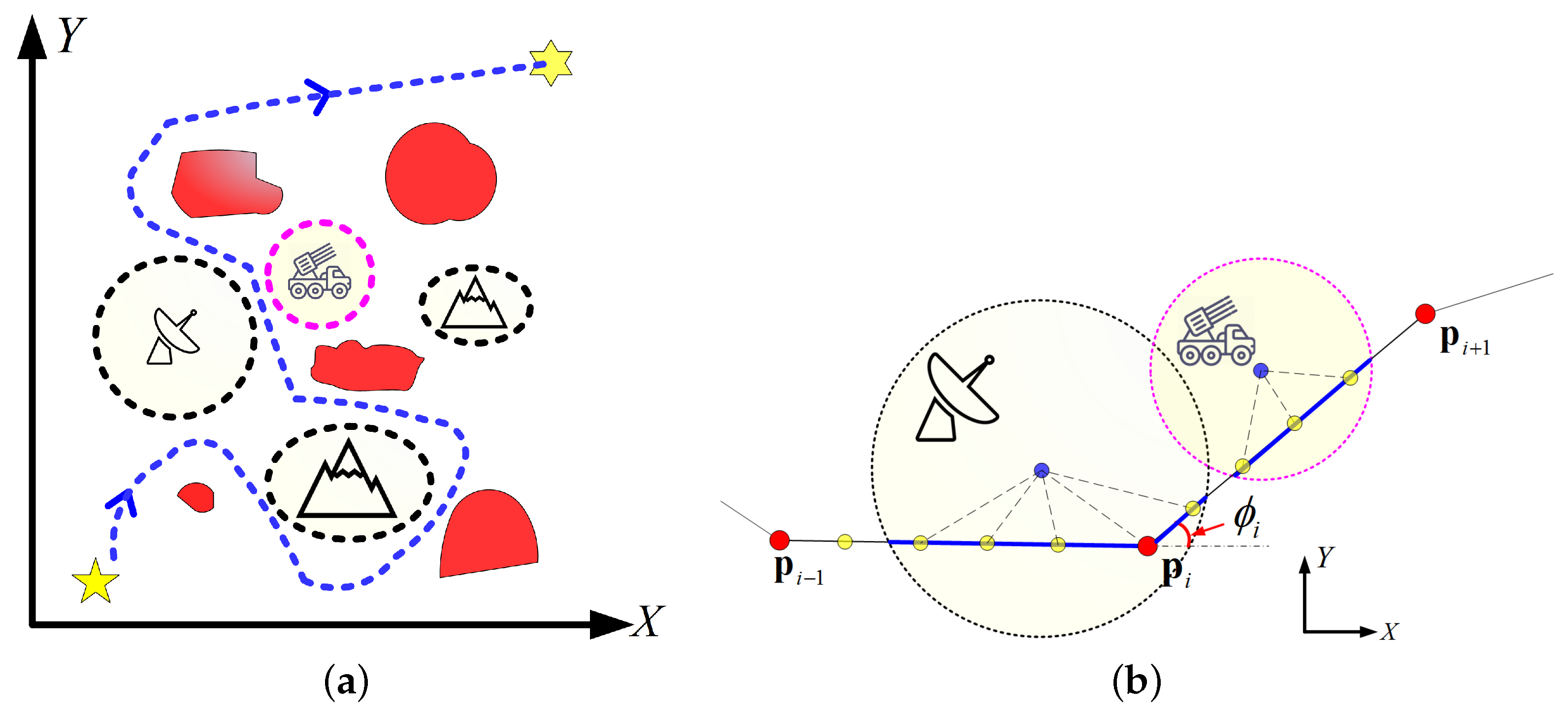
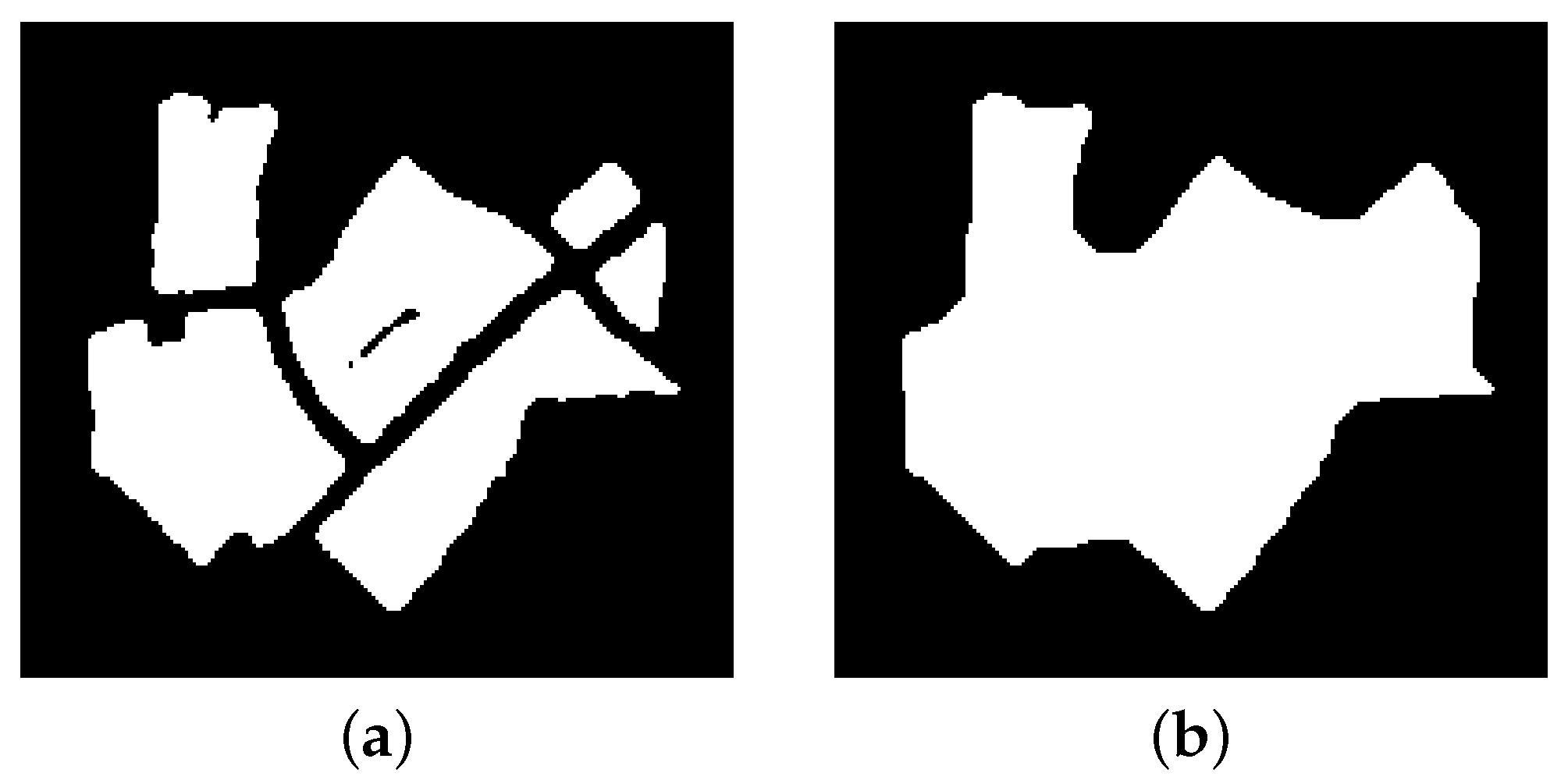
4.2.2. Locating the Boundary Segments
4.3. Near-Optimal Collection Segments Localization
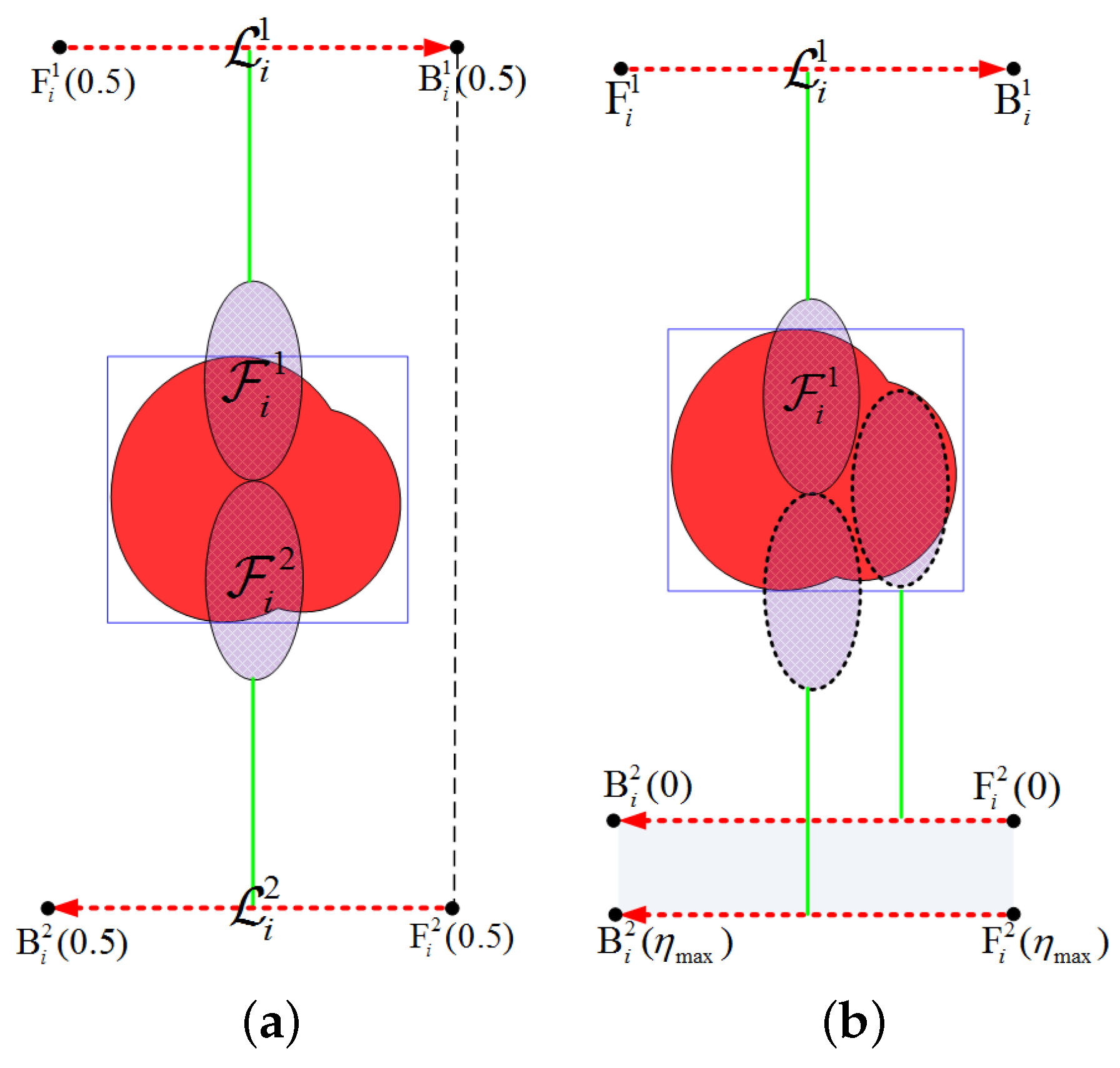
4.3.1. Searching the Optimal Visiting Order
4.3.2. Searching the Optimal Approach Angles
4.3.3. Searching the Optimal Scalars
4.4. Adjacent Collection Segments Connection
4.4.1. Sampling-Based Search Structure
4.4.2. Selection and Extension of the Best Node
| Algorithm 3 Sampling-based Sparse A* Search Algorithm. |
| Input: The starting position, the destination position, the search leg length, and the termination condition Output: Coordinates of the waypoints Begin:
|
4.4.3. Termination Conditions
4.4.4. Bidirectional Search Strategy
5. Experimental Results
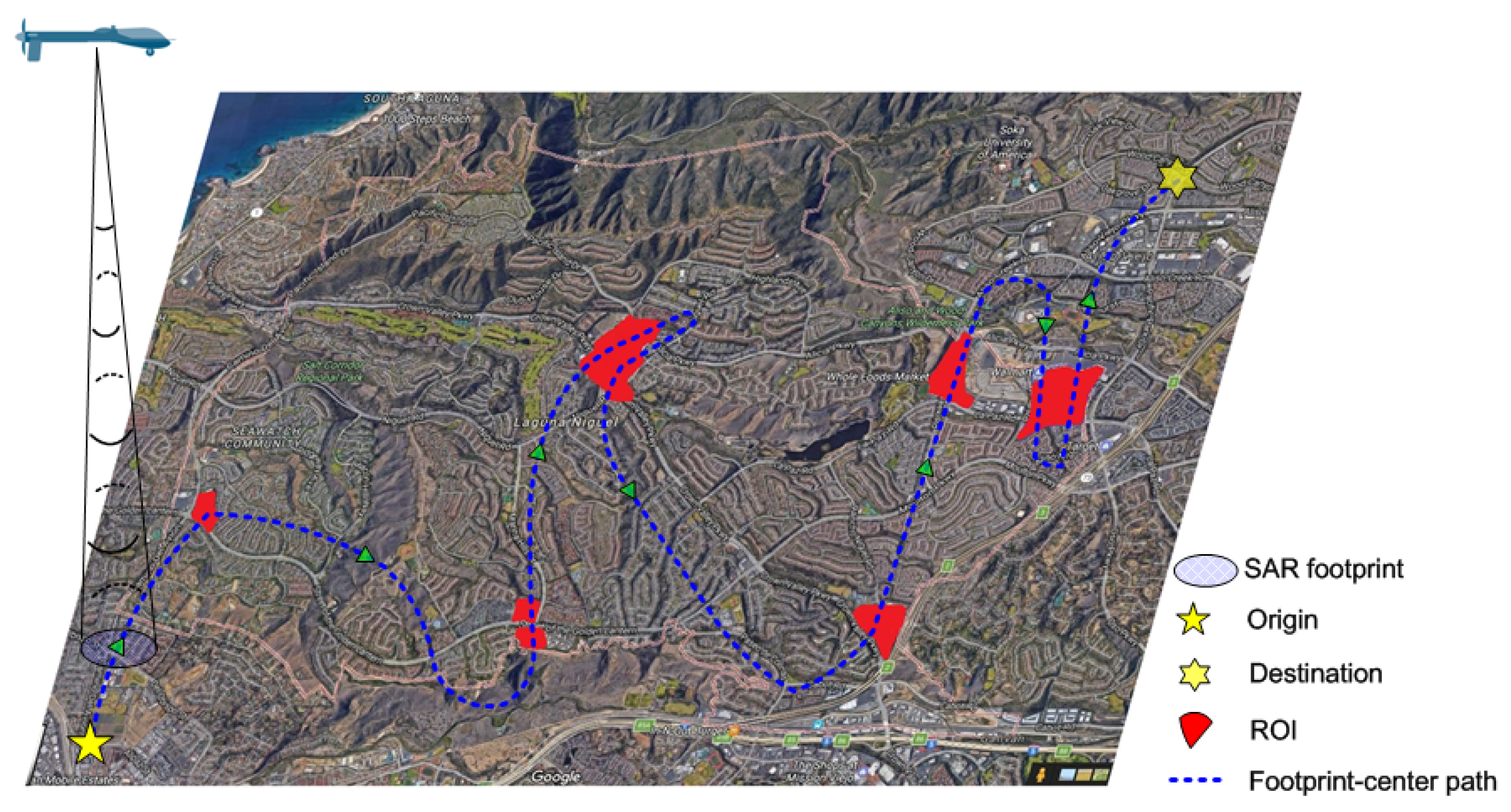
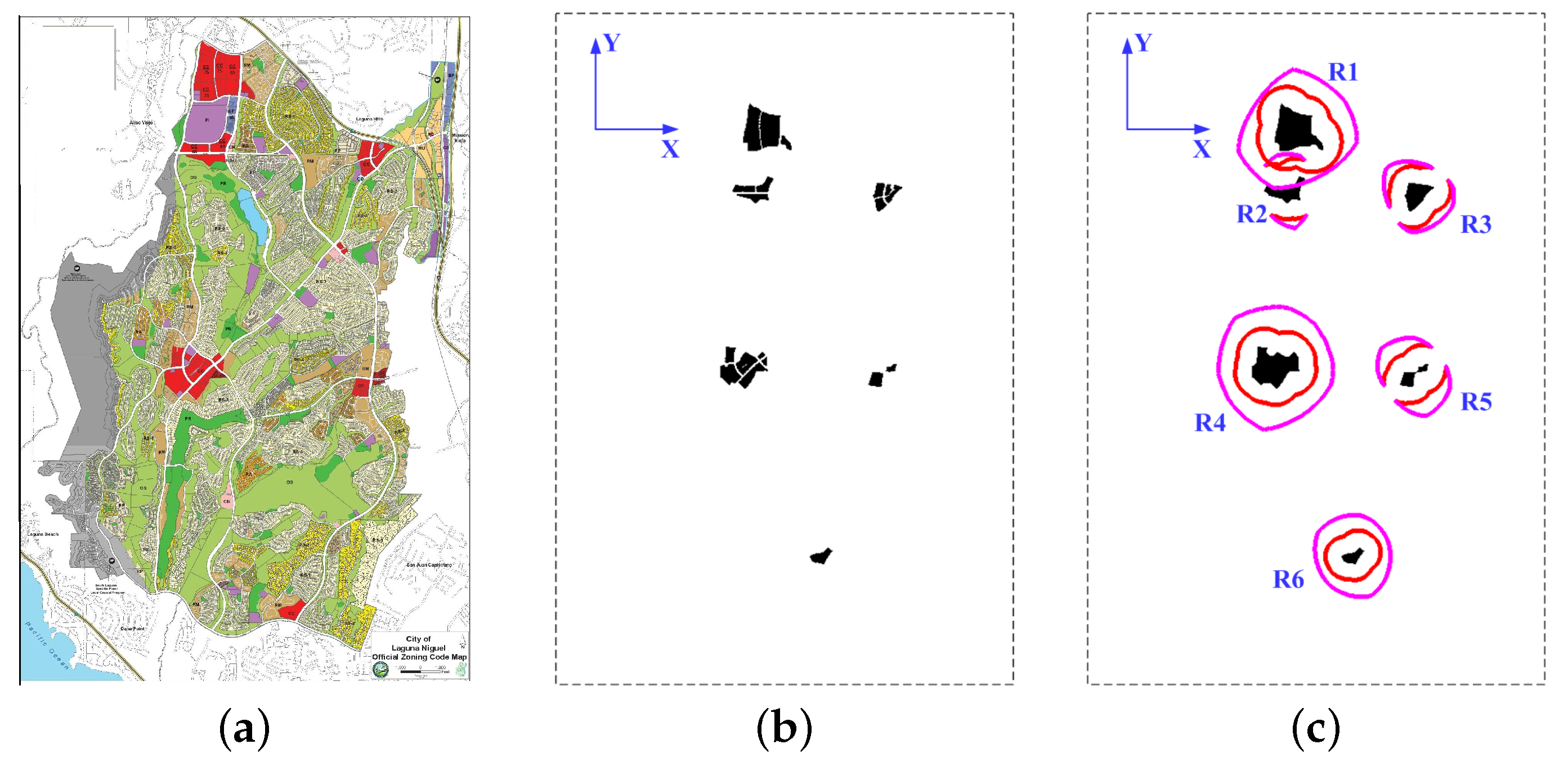
5.1. Scenario Description and Pretreatment
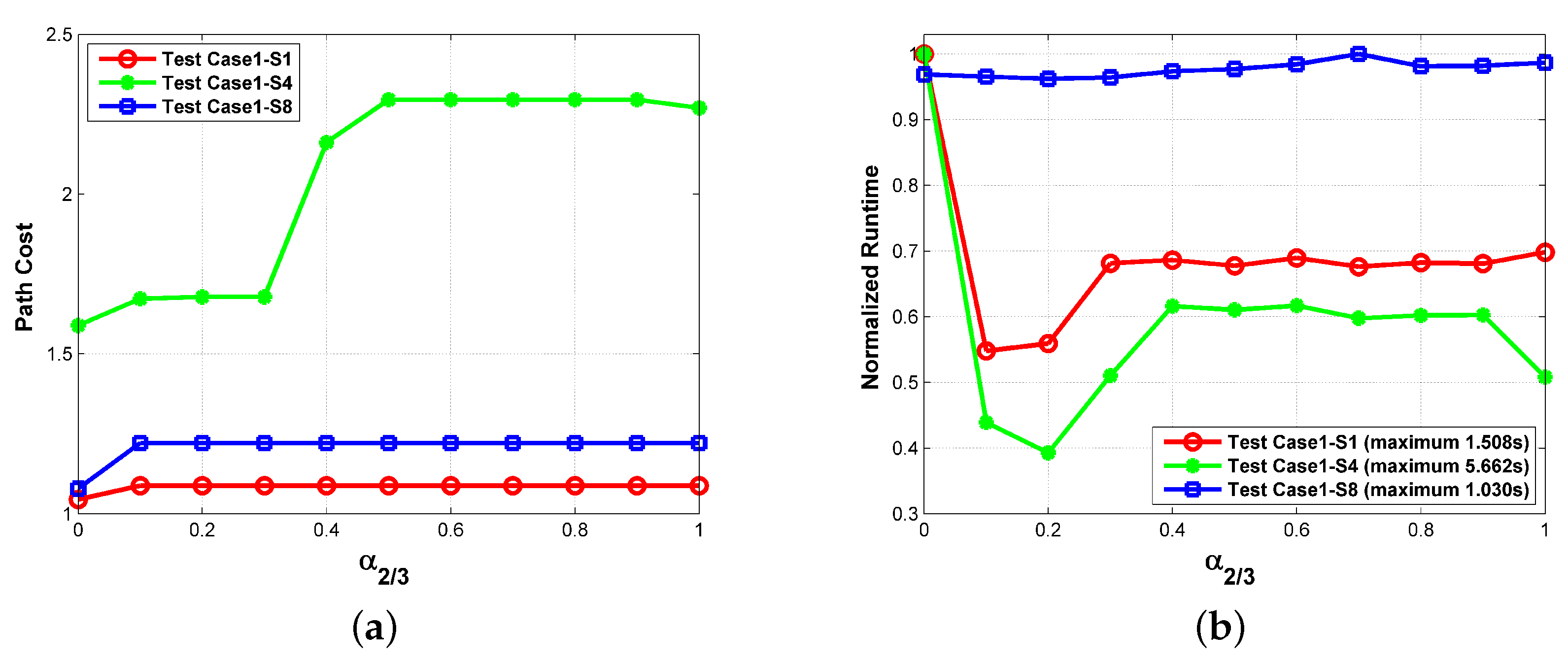
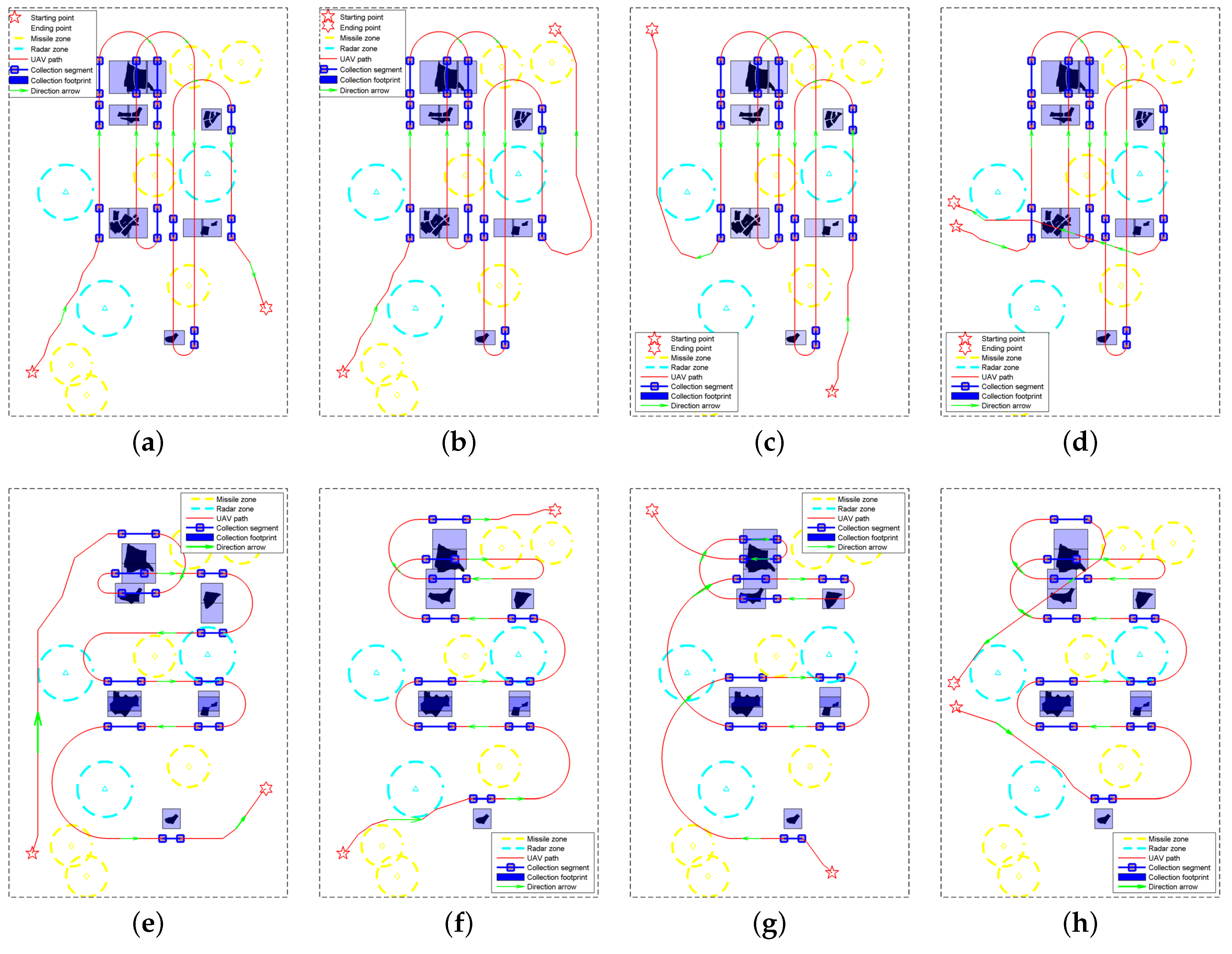
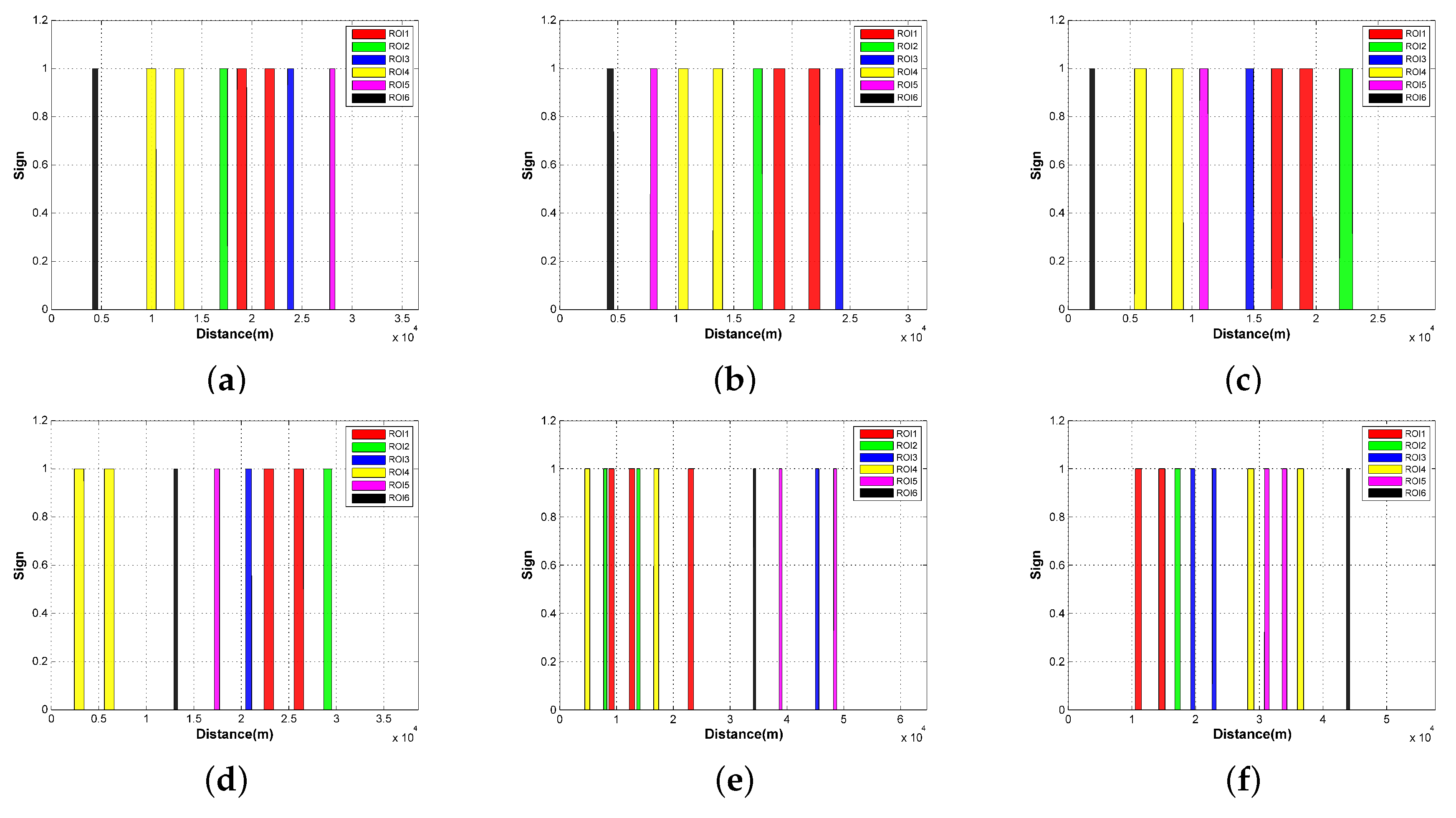
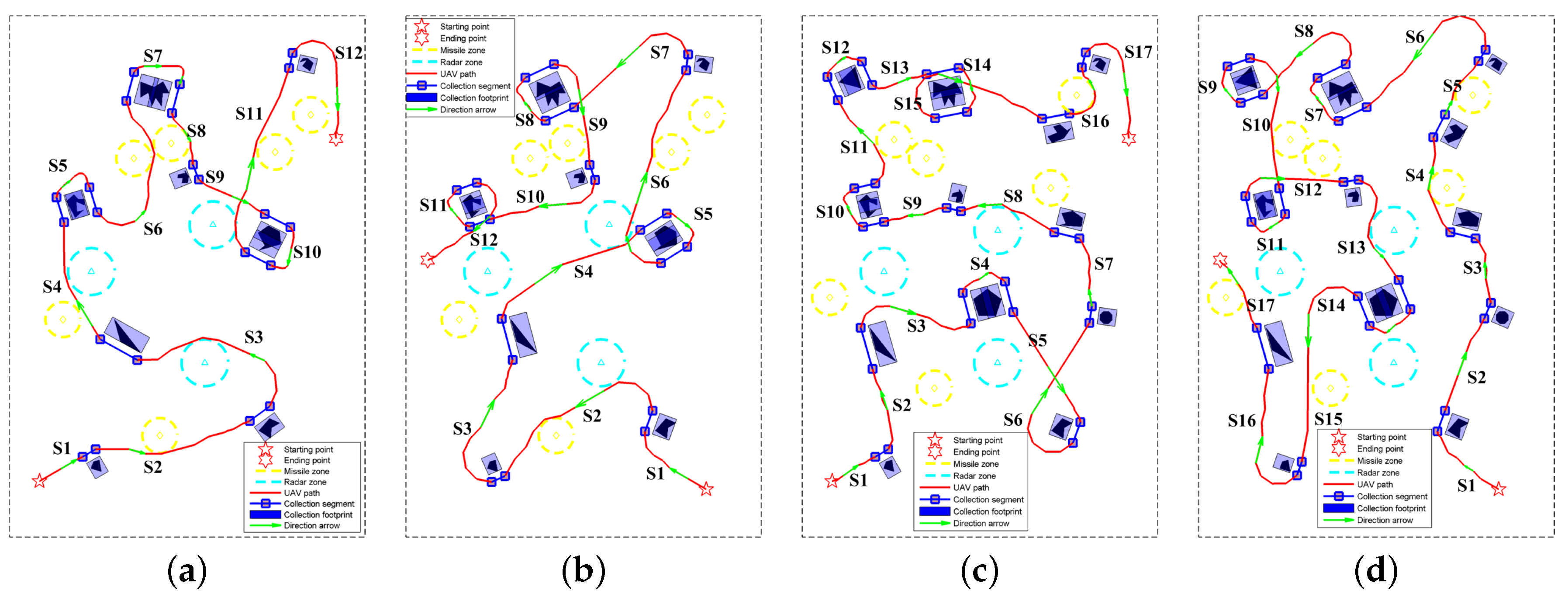
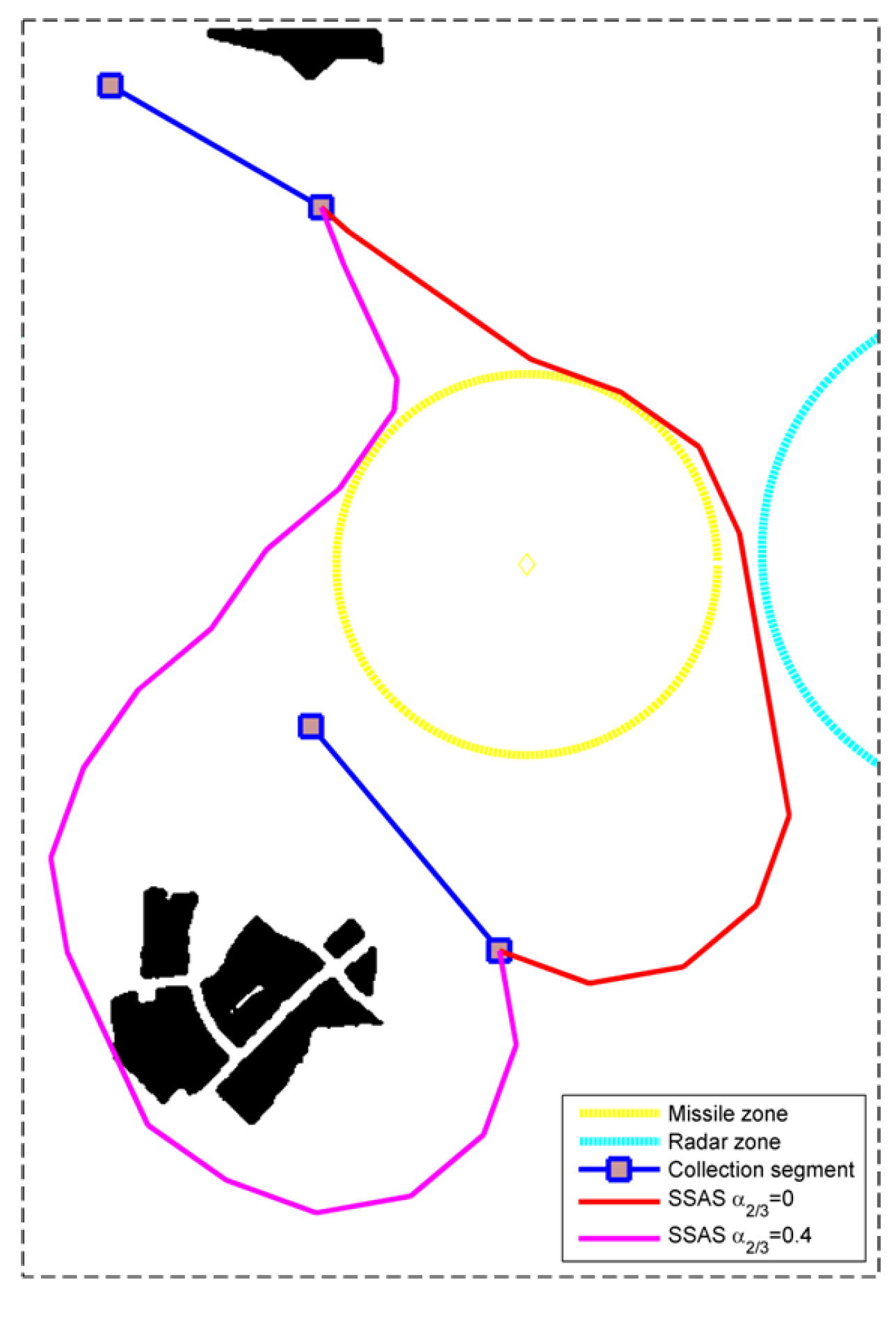
5.2. Performance of the Proposed Path Planner
5.3. Performance Comparison
5.3.1. Compared with the Conventional Zigzag Path Planner
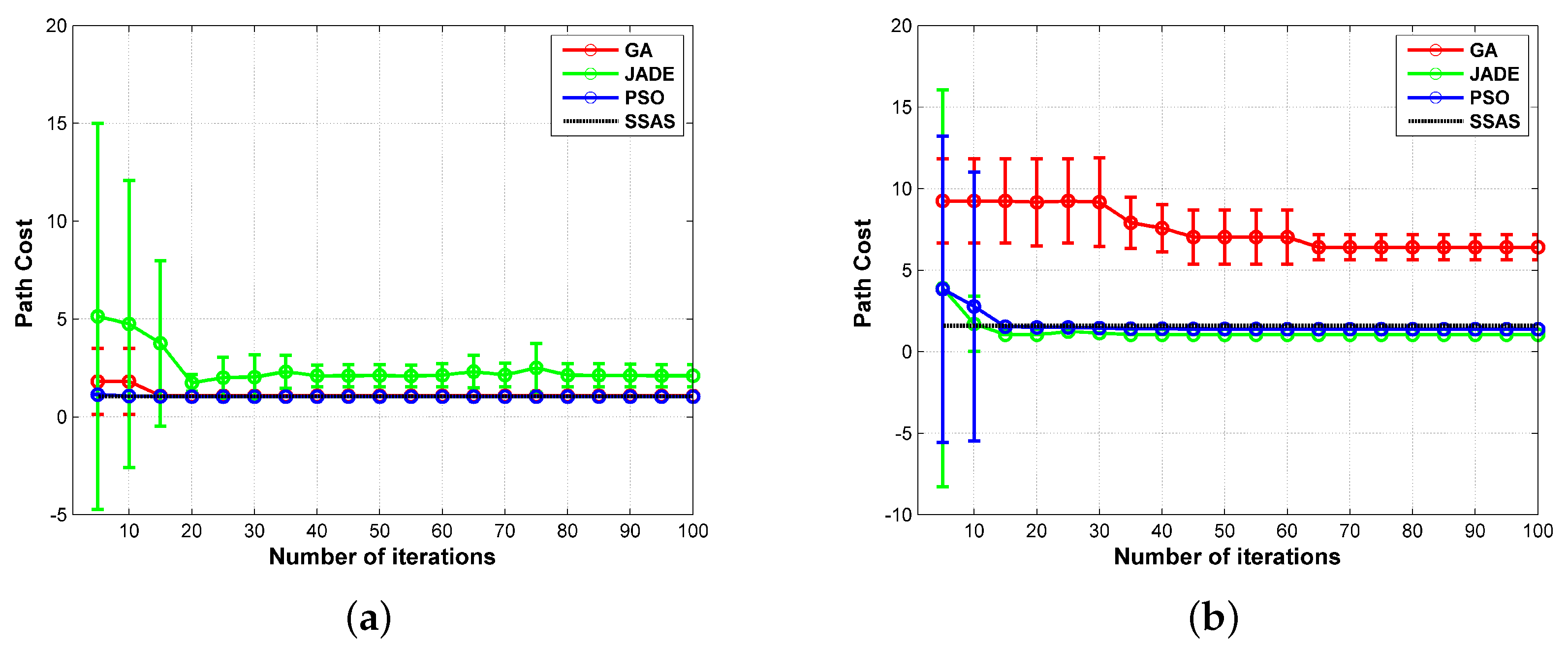
5.3.2. Compared with the Other Optimal Path Planning Algorithms
6. Discussion and Conclusions
- The flight altitude is assumed to be constant while the changing elevation of search area is not accounted for.
- The ROIs are of comparable size to the radar swath width, and no more than one turn is required to achieve the full coverage of interesting regions.
- The threats between ROIs are ignored when searching the visiting sequence and the approach angles. In some cases, the threats between the interesting regions may force the actual path to be curvy, which would prolong the path.
- The threats are ignored in defining the feasible angles. In some cases, a threat close to an ROI could restrict the feasibility of some approach angles.
- The coverage of some irregularly shaped ROIs can be achieved in a more economical way. For example, both legs of an L-shaped ROI can be traversed independently to save time and power.
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| UAV | Unmanned Aerial Vehicle |
| SAR | Synthetic Aperture Radar |
| ROI | Regions of Interest |
| MOP | Multiobjective Optimization Problem |
| SSAS | Sampling-based Sparse A* Search |
| EA | Evolutional Algorithm |
| PSO | Particle Swarm Optimization |
| SAS | Sparse A* Search |
| DEM | Digital Elevation Map |
| PLR | Path Length Ratio |
| RKill | Risk of Kill |
| RRD | Risk of Radar Detection |
| MBR | Minimum Bounding Rectangle |
| TSP | Traveling Salesman Problem |
| WSM | Weighted Sum Model |
| RL | Route Length |
| CL | Collection Length |
| DC | Duty Cycle |
| GA | Genetic Algorithm |
| DE | Differential Evolution |
| SR | Success Rate |
References
- Colomina, I.; Molina, P. Unmanned aerial systems for photogrammetry and remote sensing: A review. ISPRS J. Photogramm. Remote Sens. 2014, 92, 79–97. [Google Scholar] [CrossRef]
- Samad, T.; Bay, J.S.; Godbole, D. Network-Centric Systems for Military Operations in Urban Terrain: The Role of UAVs. Proc. IEEE 2007, 95, 92–107. [Google Scholar] [CrossRef]
- Valavanis, K.P. Advances in Unmanned Aerial Vehicles: State of the Art and the Road to Autonomy; Springer Science & Business Media: New York, NY, USA, 2008. [Google Scholar]
- Federal Aviation Administration. Integration of civil Unmanned Aircraft Systems (UAS) in the National Airspace System (NAS) Roadmap; Technical Report; US Department of Transportation: Washington, DC, USA, 2013.
- Samczynski, P.; Kulpa, K.; Malanowski, M.; Wielgo, M.; Baranowski, P.; Ndini, K.; Roszkowski, P.; Dzwonkowski, P. SARENKA—C-band SAR radar for UAV application. In Proceedings of the 10th European Conference on Synthetic Aperture Radar (EUSAR 2014), Berlin, Germany, 3–5 June 2014; pp. 1287–1290. [Google Scholar]
- Yan, X.; Chen, J.; Liyanage, B.; Wang, P.; Yang, W. A light-weight SAR system for multi-rotor UAV platform using LFM quasi-CW waveform. In Proceedings of the 2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; pp. 7346–7349. [Google Scholar]
- Zaugg, E.; Hudson, D.; Long, D. The BYU SAR: A Small, Student-Built SAR for UAV Operation. In Proceedings of the IEEE International Conference on Geoscience and Remote Sensing Symposium (IGARSS 2006), Denver, CO, USA, 31 July–4 August 2006; pp. 411–414. [Google Scholar]
- Edrich, M. Ultra-lightweight synthetic aperture radar based on a 35 GHz FMCW sensor concept and online raw data transmission. IEE Proc. Radar Sonar Navigat. 2006, 153, 129–134. [Google Scholar] [CrossRef]
- Besada-Portas, E.; de la Torre, L.; de la Cruz, J.M.; de Andrés-Toro, B. Evolutionary Trajectory Planner for Multiple UAVs in Realistic Scenarios. IEEE Trans. Robot. 2010, 26, 619–634. [Google Scholar] [CrossRef]
- Li, P.; Duan, H. A potential game approach to multiple UAV cooperative search and surveillance. Aerosp. Sci. Technol. 2017, 68, 403–415. [Google Scholar] [CrossRef]
- Perez-Carabaza, S.; Besada-Portas, E.; Lopez-Orozco, J.A.; de la Cruz, J.M. A Real World Multi-UAV Evolutionary Planner for Minimum Time Target Detection. In Proceedings of the Genetic and Evolutionary Computation Conference 2016 (GECCO ’16), Denver, CO, USA, 20–24 July 2016; ACM: New York, NY, USA, 2016; pp. 981–988. [Google Scholar]
- Kuhlman, M.J.; Otte, M.W.; Sofge, D.; Gupta, S.K. Multipass Target Search in Natural Environments. Sensors 2017, 17. [Google Scholar] [CrossRef] [PubMed]
- Yu, H.; Beard, R.W.; Argyle, M.; Chamberlain, C. Probabilistic path planning for cooperative target tracking using aerial and ground vehicles. In Proceedings of the 2011 American Control Conference, San Francisco, CA, USA, 29 June–1 July 2011; pp. 4673–4678. [Google Scholar]
- Beard, R.W.; McLain, T.W.; Goodrich, M.A.; Anderson, E.P. Coordinated target assignment and intercept for unmanned air vehicles. IEEE Trans. Robot. Autom. 2002, 18, 911–922. [Google Scholar] [CrossRef]
- Tang, Z.; Ozguner, U. Motion planning for multitarget surveillance with mobile sensor agents. IEEE Trans. Robot. 2005, 21, 898–908. [Google Scholar] [CrossRef]
- Mathew, N.; Smith, S.L.; Waslander, S.L. Multirobot Rendezvous Planning for Recharging in Persistent Tasks. IEEE Trans. Rob. 2015, 31, 128–142. [Google Scholar] [CrossRef]
- Moreira, A.; Prats-Iraola, P.; Younis, M.; Krieger, G.; Hajnsek, I.; Papathanassiou, K.P. A tutorial on synthetic aperture radar. IEEE Geosci. Remote Sens. Mag. 2013, 1, 6–43. [Google Scholar] [CrossRef] [Green Version]
- Reigber, A.; Scheiber, R.; Jager, M.; Prats-Iraola, P.; Hajnsek, I.; Jagdhuber, T.; Papathanassiou, K.P.; Nannini, M.; Aguilera, E.; Baumgartner, S.; et al. Very-High-Resolution Airborne Synthetic Aperture Radar Imaging: Signal Processing and Applications. Proc. IEEE 2013, 101, 759–783. [Google Scholar] [CrossRef]
- Carrara, W.G.; Goodman, R.S.; Majewski, R.M. Spotlight Synthetic Aperture Radar: Signal Processing Algorithms; Artech House: Norwood, MA, USA, 1995. [Google Scholar]
- Rosen, P.A.; Hensley, S.; Wheeler, K.; Sadowy, G.; Miller, T.; Shaffer, S.; Muellerschoen, R.; Jones, C.; Zebker, H.; Madsen, S. UAVSAR: A new NASA airborne SAR system for science and technology research. In Proceedings of the IEEE Conference on Radar, Verona, NY, USA, 24–27 April 2006; pp. 22–29. [Google Scholar]
- Sun, Z.; Wu, J.; Yang, J.; Huang, Y.; Li, C.; Li, D. Path Planning for GEO-UAV Bistatic SAR Using Constrained Adaptive Multiobjective Differential Evolution. IEEE Trans. Geosci. Remote Sens. 2016, 54, 6444–6457. [Google Scholar] [CrossRef]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T. A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef]
- Fonseca, C.M.; Fleming, P.J. Multiobjective optimization and multiple constraint handling with evolutionary algorithms- Part I: A unified formulation. IEEE Trans. Syst. Man Cybern. A 1998, 28, 26–37. [Google Scholar] [CrossRef]
- Ahmadzadeh, A.; Keller, J.; Pappas, G.; Jadbabaie, A.; Kumar, V. An optimization-based approach to time-critical cooperative surveillance and coverage with UAVs. In Experimental Robotics; Proceedings of the 10th International Symposium on Experimental Robotics; Springer: Rio de Janeiro, Brazil, 2008; pp. 491–500. [Google Scholar]
- Tisdale, J.; Kim, Z.; Hedrick, J.K. Autonomous UAV path planning and estimation. IEEE Robot. Autom. Mag. 2009, 16, 35–42. [Google Scholar] [CrossRef]
- Li, Z.; Xing, M.; Liang, Y.; Gao, Y.; Chen, J.; Huai, Y.; Zeng, L.; Sun, G.C.; Bao, Z. A Frequency-Domain Imaging Algorithm for Highly Squinted SAR Mounted on Maneuvering Platforms With Nonlinear Trajectory. IEEE Trans. Geosci. Remote Sens. 2016, 54, 4023–4038. [Google Scholar] [CrossRef]
- Espeseth, M.M.; Skrunes, S.; Jones, C.E.; Brekke, C.; Holt, B.; Doulgeris, A.P. Analysis of Evolving Oil Spills in Full-Polarimetric and Hybrid-Polarity SAR. IEEE Trans. Geosci. Remote Sens. 2017, 55, 4190–4210. [Google Scholar] [CrossRef]
- Edrich, M.; Weiss, G. Second-Generation Ka-Band UAV SAR System. In Proceedings of the 38th European Microwave Conference, Amsterdam, The Netherlands, 28–30 October 2008; pp. 479–482. [Google Scholar]
- Zhang, L.; Sheng, J.; Xing, M.; Qiao, Z.; Xiong, T.; Bao, Z. Wavenumber-Domain Autofocusing for Highly Squinted UAV SAR Imagery. IEEE Sens. J. 2012, 12, 1574–1588. [Google Scholar] [CrossRef]
- Xing, M.; Jiang, X.; Wu, R.; Zhou, F.; Bao, Z. Motion Compensation for UAV SAR Based on Raw Radar Data. IEEE Trans. Geosci. Remote Sens. 2009, 47, 2870–2883. [Google Scholar] [CrossRef]
- Tsunoda, S.I.; Pace, F.; Stence, J.; Woodring, M.; Hensley, W.H.; Doerry, A.W.; Walker, B.C. Lynx: A high-resolution synthetic aperture radar. In Proceedings of the IEEE Aerospace Conference, Big Sky, MT, USA, 25 March 2000; Volume 5, pp. 51–58. [Google Scholar]
- Alberti, G.; Citarella, L.; Ciofaniello, L.; Fusco, R.; Galiero, G.; Minoliti, A.; Moccia, A.; Sacchettino, M.; Salzillo, G. Current status of the development of an Italian airborne SAR system (MINISAR). Proc. SPIE 2004, 5236, 53–59. [Google Scholar]
- Pang, C.K.; Kumar, A.; Goh, C.H.; Le, C.V. Nano-satellite swarm for SAR applications: Design and robust scheduling. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 853–865. [Google Scholar] [CrossRef]
- Galceran, E.; Carreras, M. A survey on coverage path planning for robotics. Robot. Auton. Syst. 2013, 61, 1258–1276. [Google Scholar] [CrossRef]
- Desouza, G.N.; Kak, A.C. Vision for mobile robot navigation: A survey. IEEE Trans. Pattern Anal. Mach. Intell. 2002, 24, 237–267. [Google Scholar] [CrossRef]
- Kuffner, J.J.; LaValle, S.M. RRT-connect: An efficient approach to single-query path planning. In Proceedings of the IEEE International Conference on Robotics and Automation, San Francisco, CA, USA, 24–28 April 2000; Volume 2, pp. 995–1001. [Google Scholar]
- Rickert, M.; Sieverling, A.; Brock, O. Balancing Exploration and Exploitation in Sampling-Based Motion Planning. IEEE Trans. Robot. 2014, 30, 1305–1317. [Google Scholar] [CrossRef]
- Huang, Q.; Yokoi, K.; Kajita, S.; Kaneko, K.; Arai, H.; Koyachi, N.; Tanie, K. Planning walking patterns for a biped robot. IEEE Trans. Robot. Autom. 2001, 17, 280–289. [Google Scholar] [CrossRef]
- Szczerba, R.J.; Galkowski, P.; Glicktein, I.S.; Ternullo, N. Robust algorithm for real-time route planning. IEEE Trans. Aerosp. Electron. Syst. 2000, 36, 869–878. [Google Scholar] [CrossRef]
- Nikolos, I.K.; Valavanis, K.P.; Tsourveloudis, N.C.; Kostaras, A.N. Evolutionary algorithm based offline/online path planner for UAV navigation. IEEE Trans. Syst. Man Cybern. B Cybern. 2003, 33, 898–912. [Google Scholar] [CrossRef] [PubMed]
- Bortoff, S.A. Path planning for UAVs. In Proceedings of the American Control Conference, Chicago, IL, USA, 28–30 June 2000; Volume 1, pp. 364–368. [Google Scholar]
- Li, J.; Deng, G.; Luo, C.; Lin, Q.; Yan, Q.; Ming, Z. A Hybrid Path Planning Method in Unmanned Air/Ground Vehicle (UAV/UGV) Cooperative Systems. IEEE Trans. Veh. Technol. 2016, 65, 9585–9596. [Google Scholar] [CrossRef]
- Yang, P.; Tang, K.; Lozano, J.A.; Cao, X. Path Planning for Single Unmanned Aerial Vehicle by Separately Evolving Waypoints. IEEE Trans. Robot. 2015, 31, 1130–1146. [Google Scholar] [CrossRef]
- Zheng, C.; Li, L.; Xu, F.; Sun, F.; Ding, M. Evolutionary Route Planner for Unmanned Air Vehicles. IEEE Trans. Robot. 2005, 21, 609–620. [Google Scholar] [CrossRef]
- Fu, Y.; Ding, M.; Zhou, C.; Hu, H. Route Planning for Unmanned Aerial Vehicle (UAV) on the Sea Using Hybrid Differential Evolution and Quantum-Behaved Particle Swarm Optimization. IEEE Trans. Syst. Man Cybern. Syst. 2013, 43, 1451–1465. [Google Scholar] [CrossRef]
- Ergezer, H.; Leblebicioglu, K. Path Planning for UAVs for Maximum Information Collection. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 502–520. [Google Scholar] [CrossRef]
- Foo, J.L.; Knutzon, J.; Kalivarapu, V.; Oliver, J.; Winer, E. Path planning of unmanned aerial vehicles using B-splines and particle swarm optimization. J. Aerosp. Comput. Inf. Commun. 2009, 6, 271–290. [Google Scholar] [CrossRef]
- Zhang, X.; Duan, H. An improved constrained differential evolution algorithm for unmanned aerial vehicle global route planning. Appl. Soft Comput. 2015, 26, 270–284. [Google Scholar] [CrossRef]
- Howlett, J.; Goodrich, M.; McLain, T. Learning real-time A* path planner for sensing closely-spaced targets from an aircraft. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, Austin, TX, USA, 11–14 August 2003. [Google Scholar]
- Duan, H.; Zhang, X.; Wu, J.; Ma, G. Max-Min Adaptive Ant Colony Optimization Approach to Multi-UAVs Coordinated Trajectory Replanning in Dynamic and Uncertain Environments. J. Bionic Eng. 2009, 6, 161–173. [Google Scholar] [CrossRef]
- Garcia, M.P.; Montiel, O.; Castillo, O.; Sepúlveda, R.; Melin, P. Path planning for autonomous mobile robot navigation with ant colony optimization and fuzzy cost function evaluation. Appl. Soft Comput. 2009, 9, 1102–1110. [Google Scholar] [CrossRef]
- Li, P.; Duan, H. Path planning of unmanned aerial vehicle based on improved gravitational search algorithm. Sci. China Technol. Sci. 2012, 55, 2712–2719. [Google Scholar] [CrossRef]
- Lin, F.T.; Kao, C.Y.; Hsu, C.C. Applying the genetic approach to simulated annealing in solving some NP-hard problems. IEEE Trans. Syst. Man Cybern. 1993, 23, 1752–1767. [Google Scholar]
- Roberge, V.; Tarbouchi, M.; Labonte, G. Comparison of Parallel Genetic Algorithm and Particle Swarm Optimization for Real-Time UAV Path Planning. IEEE Trans. Ind. Inf. 2013, 9, 132–141. [Google Scholar] [CrossRef]
- Tokekar, P.; Hook, J.V.; Mulla, D.; Isler, V. Sensor Planning for a Symbiotic UAV and UGV System for Precision Agriculture. IEEE Trans. Robot. 2016, 32, 1498–1511. [Google Scholar] [CrossRef]
- Edelkamp, S.; Pomarlan, M.; Plaku, E. Multiregion Inspection by Combining Clustered Traveling Salesman Tours With Sampling-Based Motion Planning. IEEE Robot. Autom. Lett. 2017, 2, 428–435. [Google Scholar] [CrossRef]
- Ponce, O.; Prats-Iraola, P.; Pinheiro, M.; Rodriguez-Cassola, M.; Scheiber, R.; Reigber, A.; Moreira, A. Fully Polarimetric High-Resolution 3-D Imaging With Circular SAR at L-Band. IEEE Trans. Geosci. Remote Sens. 2014, 52, 3074–3090. [Google Scholar] [CrossRef]
- Frey, O.; Magnard, C.; Ruegg, M.; Meier, E. Focusing of Airborne Synthetic Aperture Radar Data from Highly Nonlinear Flight Tracks. IEEE Trans. Geosci. Remote Sens. 2009, 47, 1844–1858. [Google Scholar] [CrossRef] [Green Version]
- Mou, L.; Ghamisi, P.; Zhu, X.X. Deep Recurrent Neural Networks for Hyperspectral Image Classification. IEEE Trans. Geosci. Remote Sens. 2017, 55, 3639–3655. [Google Scholar] [CrossRef]
- Schalkof, R. Digital Image Processing and Computer Vision; Wiley: New York, NY, USA, 1989. [Google Scholar]
- He, L.; Chao, Y.; Suzuki, K. A Run-Based Two-Scan Labeling Algorithm. IEEE Trans. Image Process. 2008, 17, 749–756. [Google Scholar] [PubMed]
- Papadias, D.; Theodorisdis, Y. Spatial relations, minimum bounding rectangles, and spatial data structures. Int. J. Geogr. Inf. Sci. 1997, 11, 111–138. [Google Scholar] [CrossRef]
- Canny, J. A Computational Approach to Edge Detection. IEEE Trans. Pattern Anal. Mach. Intell. 1986, PAMI-8, 679–698. [Google Scholar] [CrossRef]
- Huang, W.H. Optimal line-sweep-based decompositions for coverage algorithms. In Proceedings of the IEEE International Conference on Robotics and Automation, Seoul, Korea, 21–26 May 2001; Volume 1, pp. 27–32. [Google Scholar]
- Acar, E.U.; Choset, H.; Lee, J.Y. Sensor-based coverage with extended range detectors. IEEE Trans. Robot. 2006, 22, 189–198. [Google Scholar] [CrossRef]
- Oh, J.S.; Choi, Y.H.; Park, J.B.; Zheng, Y.F. Complete coverage navigation of cleaning robots using triangular-cell-based map. IEEE Trans. Ind. Electron. 2004, 51, 718–726. [Google Scholar] [CrossRef]
- Gu, J.; Huang, X. Efficient local search with search space smoothing: A case study of the traveling salesman problem (TSP). IEEE Trans. Syst. Man Cybern. 1994, 24, 728–735. [Google Scholar]
- Dorigo, M.; Gambardella, L.M. Ant colony system: A cooperative learning approach to the traveling salesman problem. IEEE Trans. Evol. Comput. 1997, 1, 53–66. [Google Scholar] [CrossRef]
- Larrañaga, P.; Kuijpers, C.; Murga, R.; Inza, I.; Dizdarevic, S. Genetic Algorithms for the Travelling Salesman Problem: A Review of Representations and Operators. Artif. Intell. Rev. 1999, 13, 129–170. [Google Scholar] [CrossRef]
- Karaman, S.; Frazzoli, E. Sampling-based algorithms for optimal motion planning. Int. J. Robot. Res. 2011, 30, 846–894. [Google Scholar] [CrossRef]
- City of Laguna Niguel, CA, USA. City of Laguna Niguel Official Zoning Code Map. Available online: http://www.cityoflagunaniguel.org/DocumentCenter/Home/View/702 (accessed on 5 February 2018).
- Jarvis, A.; Reuter, H.I.; Nelson, A.; Guevara, E. Hole-Filled SRTM for the Globe Version 4. Available online: http://srtm.csi.cgiar.org (accessed on 5 February 2018).











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
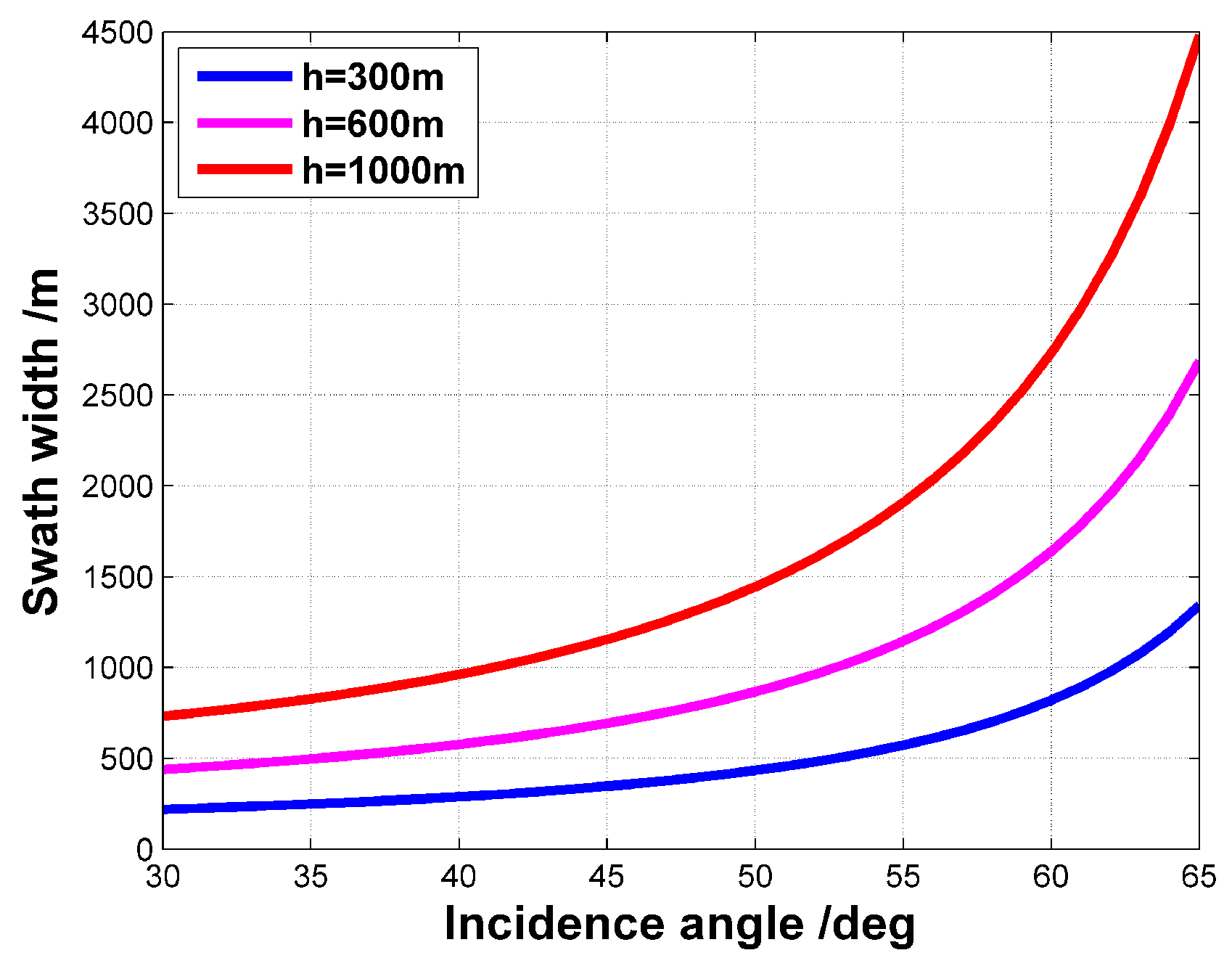
| Description | Symbol | Value |
|---|---|---|
| Flight altitude | h | 500 m |
| Incidence angle | 45° | |
| 3 dB beam width (azimuth) | 10° | |
| 3 dB beam width (elevation) | 30° | |
| Synthetic aperture length | 123.41 m | |
| Swath width | 577.35 m | |
| Near-end distance | 228.68 m |
| Type | Point ROI | Quasi-Point ROI | Distributed ROI |
|---|---|---|---|
| Label | R6 | R2, R3, R5 | R1, R4 |
| Case | Starting Point | Ending Point | Missile Centers | Radar Centers |
|---|---|---|---|---|
| 1 | (125, 234) | (1380, 880) | (336, 274) (785, 1294) (980, 1878) (1250, 1904) (968, 700) (418, 210) | (536, 478) (1070, 1302) (305, 1204) |
| 2 | (125, 234) | (1268, 2080) | ||
| 3 | (1086, 129) | (116, 2080) | ||
| 4 | (80, 1020) | (68, 1049) |
| Case 1 | Case 2 | Case 3 | Case 4 | Case 5 | Case 6 | Case 7 | Case 8 | |
|---|---|---|---|---|---|---|---|---|
| Step 2 | 16.475 s | 16.406 s | 16.181 s | 16.633 s | 42.112 s | 42.339 s | 61.806 s | 61.925 s |
| Step 3 | 10.860 s | 10.347 s | 10.669 s | 10.900 s | 15.784 s | 14.983 s | 20.741 s | 21.066 s |
| Step 4 | 45.490 s | 26.795 s | 22.796 s | 121.086 s | 89.839 s | 120.726 s | 123.056 s | 95.012 s |
| Total | 72.825 s | 53.548 s | 49.646 s | 148.619 s | 147.735 s | 178.048 s | 205.603 s | 178.003 s |
| Case | Our Path | Vertical Zigzag Path | Horizontal Zigzag Path | ||||||
|---|---|---|---|---|---|---|---|---|---|
| RL | CL | DC | RL | CL | DC | RL | CL | DC | |
| 1 | 31,523.5 m | 6206.2 m | 19.69% | 51,084.7 m | 7879.1 m | 15.42% | 47,319.4 m | 7803.4 m | 16.49% |
| 2 | 27,172.0 m | 6058.6 m | 22.30% | 56,896.8 m | 7879.1 m | 13.85% | 41,444.2 m | 8008.9 m | 19.32% |
| 3 | 28,486.0 m | 6546.6 m | 22.98% | 57,059.8 m | 7879.1 m | 13.81% | 41,942.5 m | 8149.5 m | 19.43% |
| 4 | 33,372.1 m | 6392.7 m | 19.16% | 53,488.5 m | 7879.1 m | 14.73% | 46,505.0 m | 8008.9 m | 17.22% |
| Planner | Parameters |
|---|---|
| GA [9] | , |
| JADE [43] | |
| PSO [54] |
| Algorithm | Min Cost | Max Cost | Mean Cost | St Dev | SR (%) | Runtime (s) | |
|---|---|---|---|---|---|---|---|
| Test case1-s1 | GA | 1.0525 | 42,817.0624 | 978.7960 | 5430.2681 | 84 | 1.5981 |
| JADE | 1.0456 | 13.2693 | 6.5973 | 2.7943 | 58 | 10.8631 | |
| PSO | 1.0302 | 6.5710 | 2.1465 | 2.0184 | 94 | 12.8228 | |
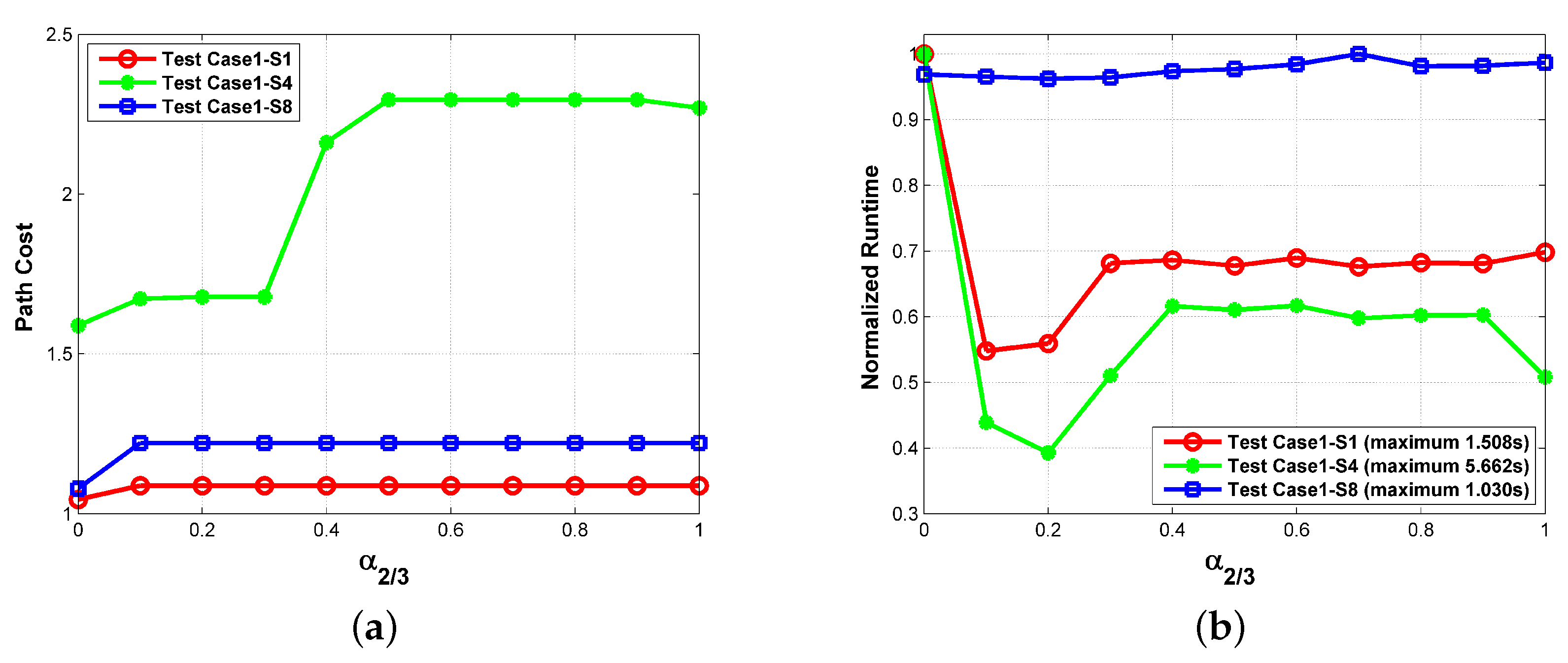
| SSAS | 1.0474 | ∖ | ∖ | 1.5076 | |||
| Test case1-s4 | GA | 5.7333 | 60.0454 | 14.6081 | 13.4047 | 31 | 1.5665 |
| JADE | N/A | N/A | N/A | N/A | 0 | 10.3604 | |
| PSO | 1.3592 | 1.4194 | 1.3844 | 0.0240 | 6 | 11.2256 | |
| SSAS | 1.5892 | ∖ | ∖ | 5.6617 | |||
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, J.; Chen, J.; Wang, P.; Li, C. Sensor-Oriented Path Planning for Multiregion Surveillance with a Single Lightweight UAV SAR. Sensors 2018, 18, 548. https://doi.org/10.3390/s18020548
Li J, Chen J, Wang P, Li C. Sensor-Oriented Path Planning for Multiregion Surveillance with a Single Lightweight UAV SAR. Sensors. 2018; 18(2):548. https://doi.org/10.3390/s18020548
Chicago/Turabian StyleLi, Jincheng, Jie Chen, Pengbo Wang, and Chunsheng Li. 2018. "Sensor-Oriented Path Planning for Multiregion Surveillance with a Single Lightweight UAV SAR" Sensors 18, no. 2: 548. https://doi.org/10.3390/s18020548
APA StyleLi, J., Chen, J., Wang, P., & Li, C. (2018). Sensor-Oriented Path Planning for Multiregion Surveillance with a Single Lightweight UAV SAR. Sensors, 18(2), 548. https://doi.org/10.3390/s18020548