A Review of Depth and Normal Fusion Algorithms


Abstract
:1. Introduction
2. Depth and Surface Normal Cues
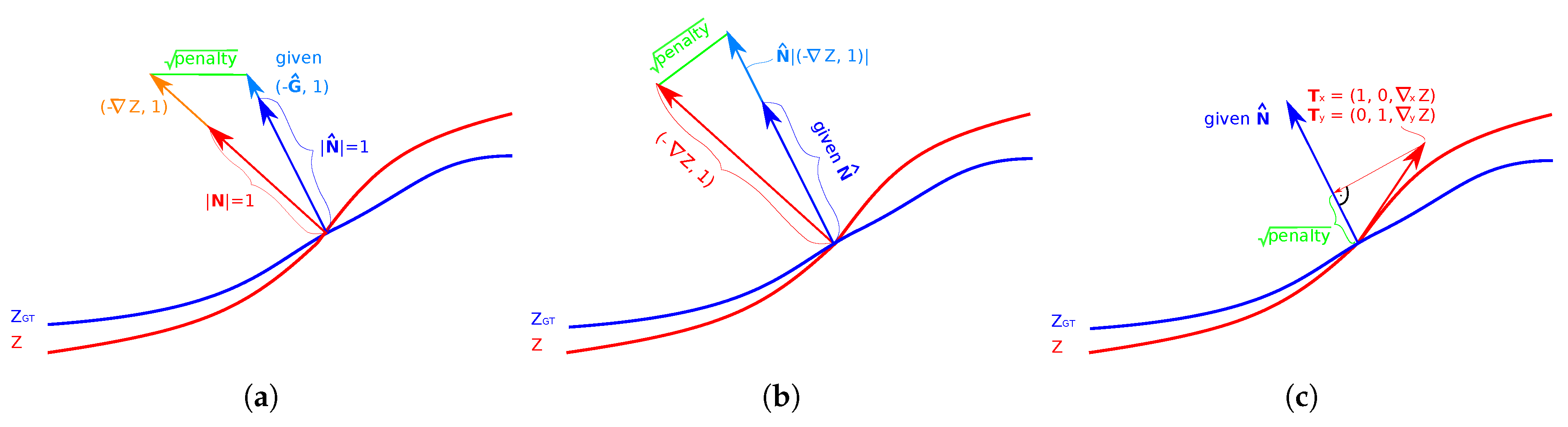
3. Notations and Preliminaries
4. Depth and Surface Normal Fusion Algorithms
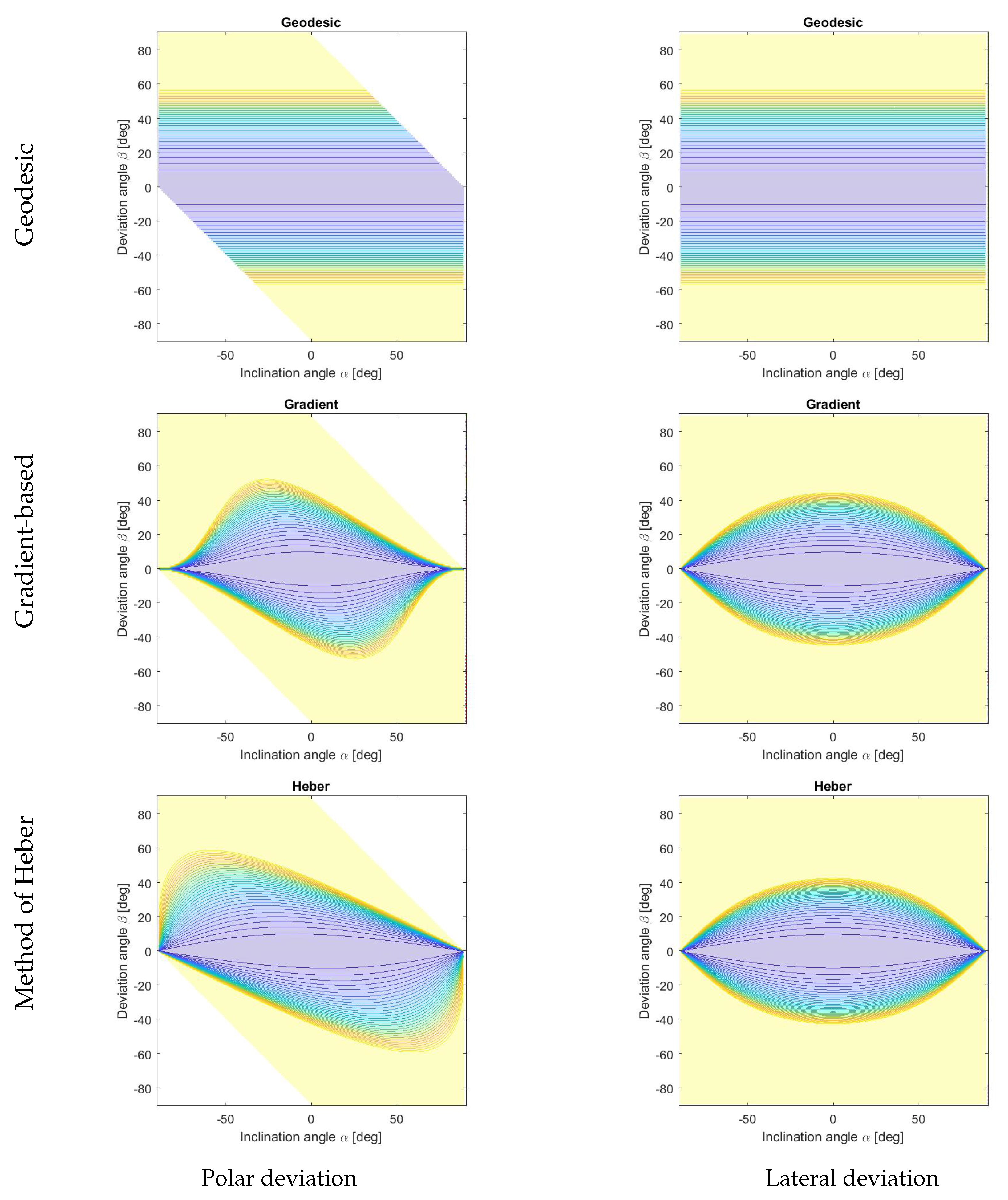
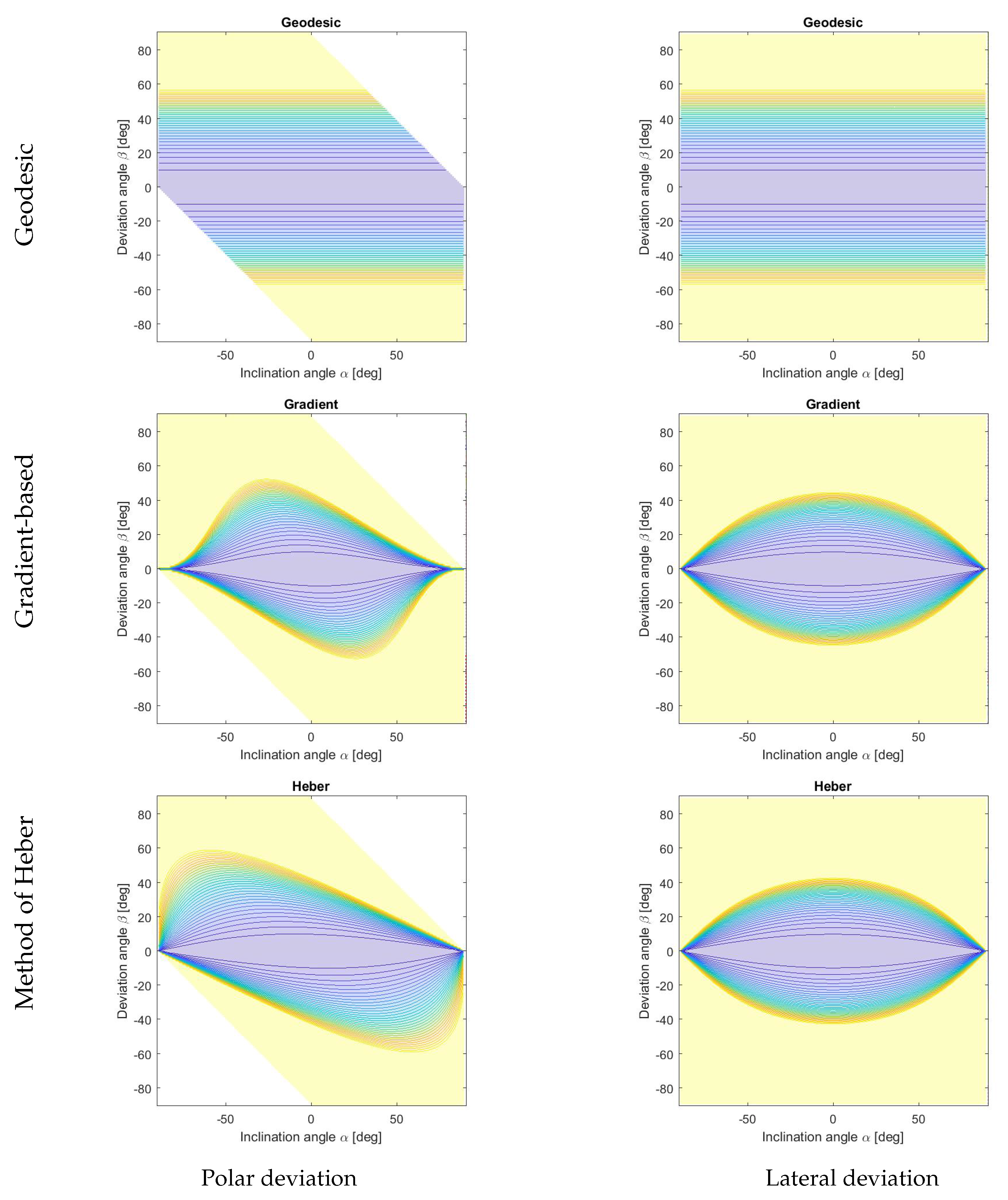
4.1. Geodesic Distance
4.2. Gradient-Based Method with Surface Orientation Constraint Only
4.3. Gradient-Based Method
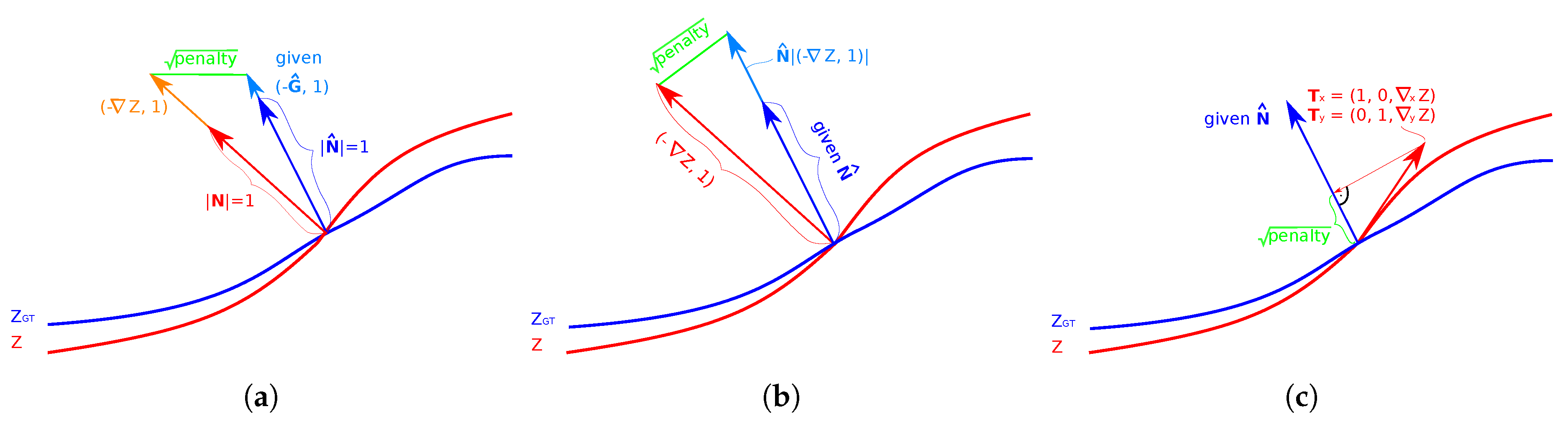
4.4. The Method of Heber
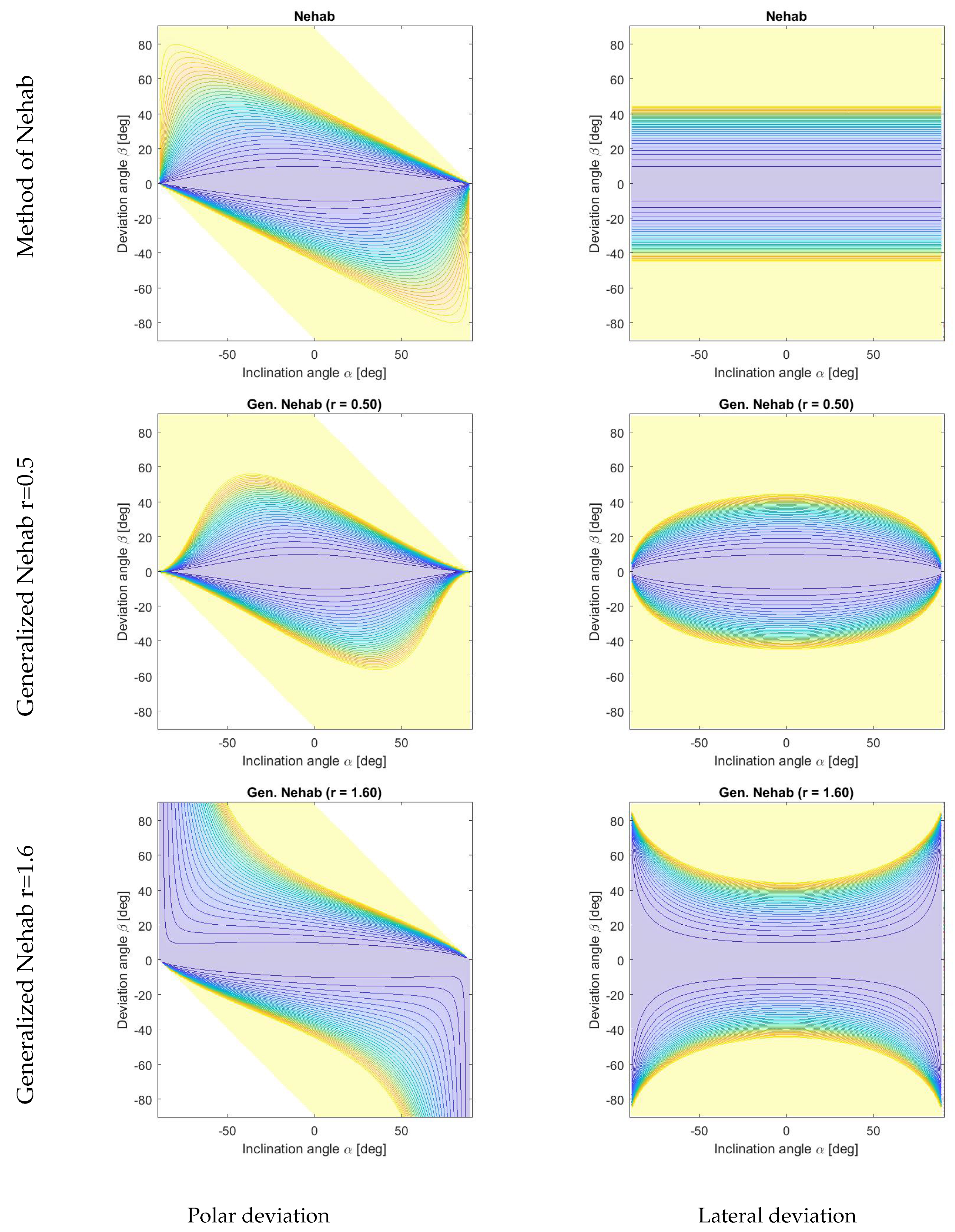
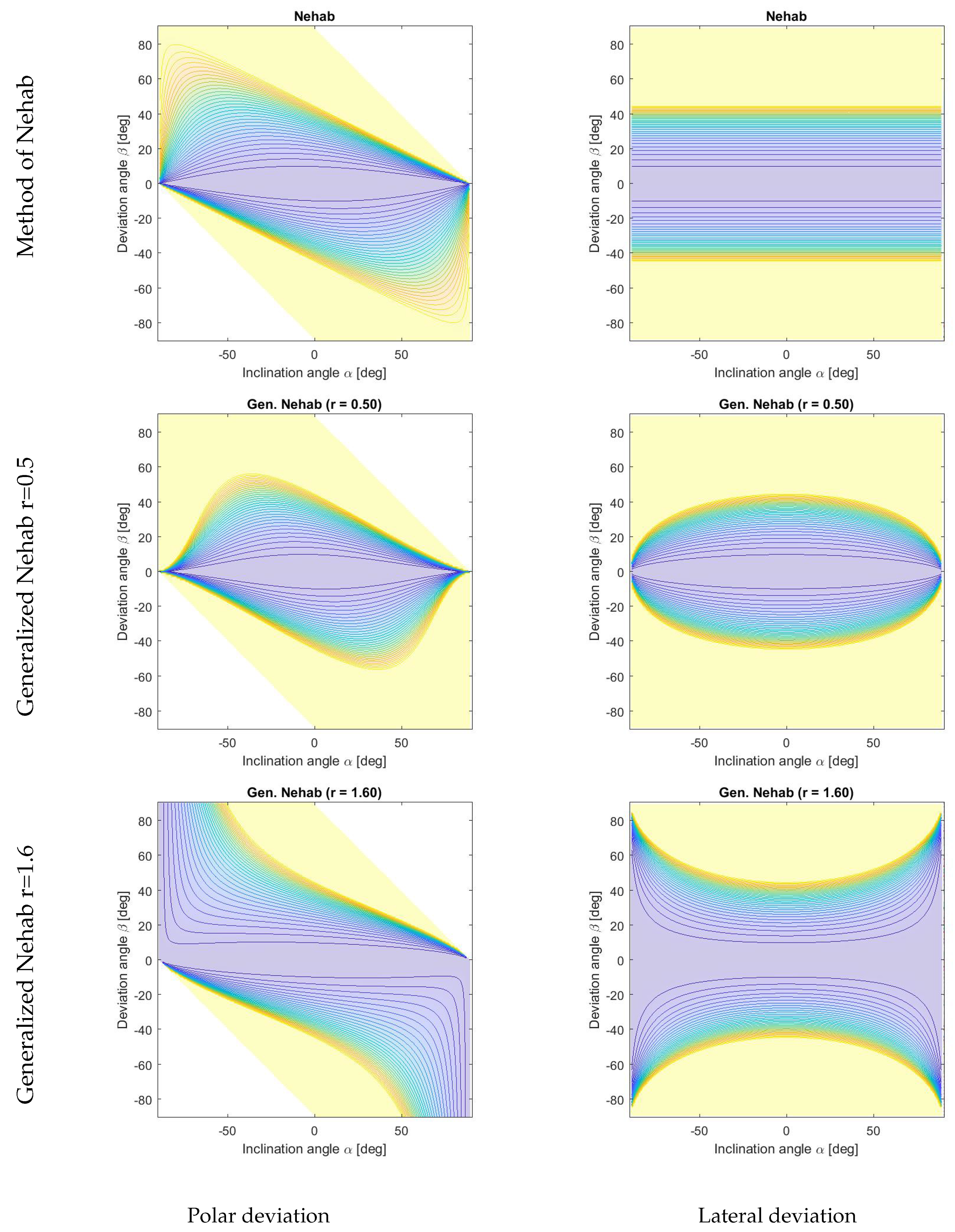
4.5. The Method of Nehab
4.6. Generalized Nehab
4.7. Total Generalized Variation
5. Evaluation
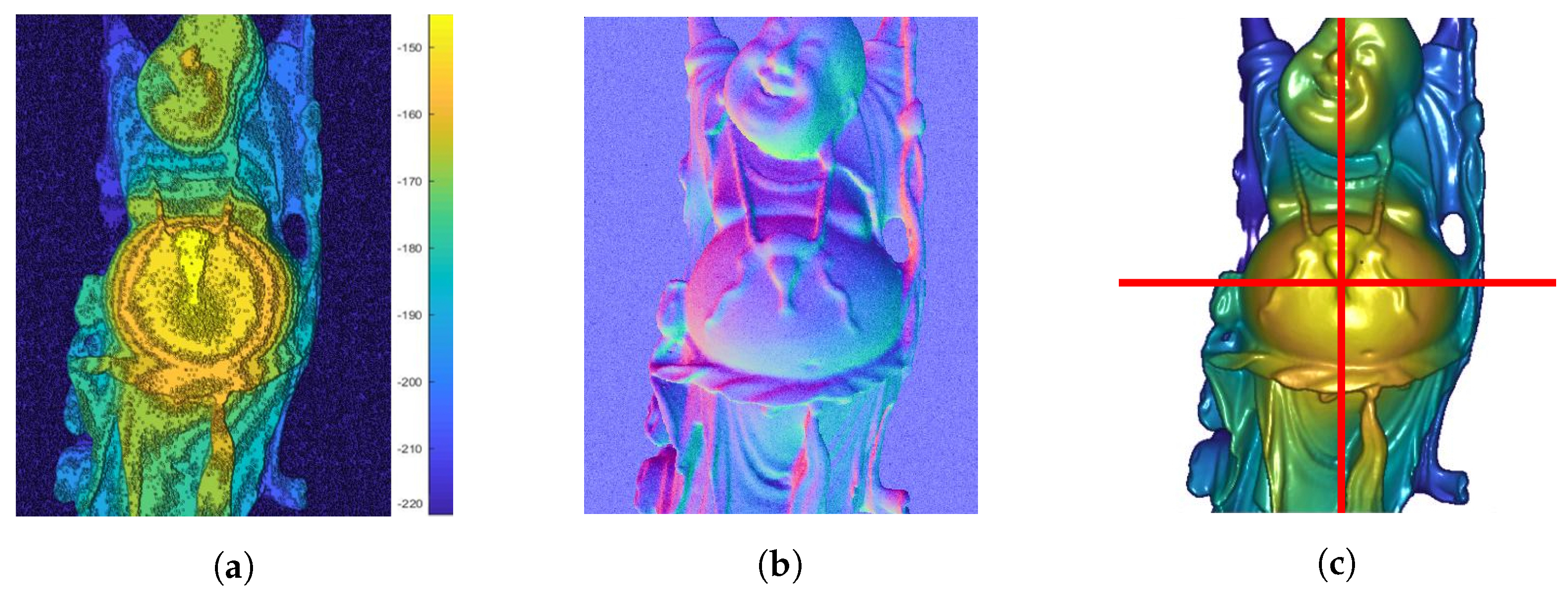
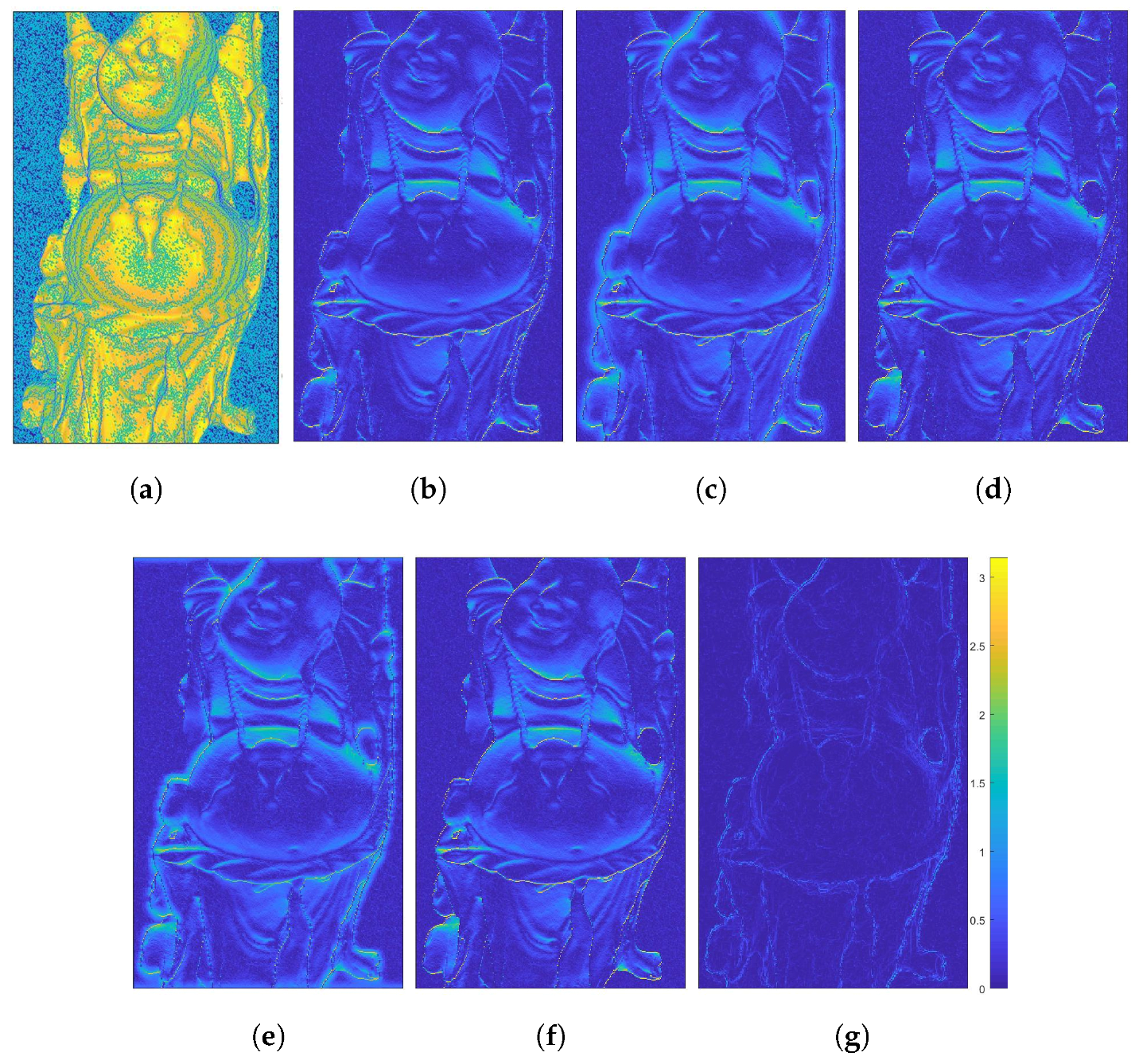
Qualitative and Quantitative Evaluation
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| CRF | Conditional Random Field |
| GT | Ground Truth |
| FISTA | Fast Iterative Shrinkage Thresholding Algorithm |
| ISTA | Iterative Shrinkage Thresholding Algorithm |
| MRF | Markov Random Field |
| MSE | Mean Squared Error |
| PD | Primal-Dual |
| SfF | Shape from Focus |
| SfM | Structure from Motion |
| TGV | Total Generalized Variation |
| ToF | Time of Flight |
| TV | Total Variation |
Appendix A. Optimization Theory
Appendix A.1. Accelerated Proximal Gradient Method
Appendix A.2. Primal-Dual
References
- Hirschmüller, H.; Innocent, P.R.; Garibaldi, J. Real-Time Correlation-Based Stereo Vision with Reduced Border Errors. Int. J. Comput. Vis. 2002, 47, 229–246. [Google Scholar] [CrossRef]
- Hirschmuller, H. Stereo Processing by Semiglobal Matching and Mutual Information. IEEE Trans. Pattern Anal. Mach. Intell. 2008, 30, 328–341. [Google Scholar] [CrossRef] [PubMed]
- Haller, I.; Pantilie, C.; Oniga, F.; Nedevschi, S. Real-Time Semi-Global Dense Stereo Solution with Improved Sub-Pixel Accuracy. In Proceedings of the 2010 IEEE Intelligent Vehicles Symposium, San Diego, CA, USA, 21–24 June 2010; pp. 369–376. [Google Scholar]
- Je, C.; Park, H.M. Optimized Hierarchical Block Matching for Fast and Accurate Image Registration. Signal Process. Image Commun. 2013, 28, 779–791. [Google Scholar] [CrossRef]
- Yang, X.; Chen, X.; Xi, J. Block Based Dense Stereo Matching Using Adaptive Cost Aggregation and Limited Disparity Estimation. In Proceedings of the 2017 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Turin, Italy, 22–25 May 2017; pp. 1–6. [Google Scholar]
- Chen, X.; Li, D.; Zou, J. Depth Estimation of Stereo Matching Based on Microarray Camera. In Proceedings of the 2017 2nd International Conference on Image, Vision and Computing (ICIVC), Chengdu, China, 2–4 June 2017; pp. 108–112. [Google Scholar]
- Bolles, R.C.; Baker, H.H.; Marimont, D.H. Epipolar-Plane Image Analysis: An Approach to Determining Structure from Motion; Springer: Berlin, Germany, 1987; Volume 1, pp. 7–55. [Google Scholar]
- Wanner, S.; Straehle, C.; Goldluecke, B. Globally Consistent Multi-Label Assignment on the Ray Space of 4D Light Fields. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR), Portland, OR, USA, 23–28 June 2013; pp. 1011–1018. [Google Scholar]
- Kim, C.; Zimmer, H.; Pritch, Y.; Sorkine-Hornung, A.; Gross, M. Scene Reconstruction from High Spatio-Angular Resolution Light Fields. ACM Trans. Graph. 2013, 32, 73:1–73:12. [Google Scholar] [CrossRef]
- Tosic, I.; Berkner, K. Light Field Scale-Depth Space Transform for Dense Depth Estimation. In Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), Columbus, OH, USA, 23–28 June 2014; pp. 435–442. [Google Scholar]
- Tao, M.W.; Wang, T.C.; Malik, J.; Ramamoorthi, R. Depth Estimation for Glossy Surfaces with Light-Field Cameras. In Proceedings of the European Conference on Computer Vision, Amsterdam, The Netherlands, 8–16 October 2016; pp. 1–14. [Google Scholar]
- Longuet-Higgins, H.C. Readings in Computer Vision: Issues, Problems, Principles, and Paradigms; Morgan Kaufmann Publishers Inc.: San Francisco, CA, USA, 1987; pp. 61–62. [Google Scholar]
- Snavely, N.; Seitz, S.M.; Szeliski, R. Photo Tourism: Exploring Photo Collections in 3D; ACM: New York, NY, USA, 2006; Volume 25, pp. 835–846. [Google Scholar]
- Park, J.; Kim, H.; Tai, Y.W.; Brown, M.S.; Kweon, I. High Quality Depth Map Upsampling for 3D-ToF Cameras. In Proceedings of the 2011 IEEE International Conference on Computer Vision, Barcelona, Spain, 6–13 November 2011; pp. 1623–1630. [Google Scholar]
- Woodham, R.J. Photometric Method for Determining Surface Orientation from Multiple Images. Int. Soc. Opt. Photonics 1980, 19, 191139. [Google Scholar] [CrossRef]
- Frankot, R.T.; Chellappa, R. A Method for Enforcing Integrability in Shape From Shading Algorithms. IEEE Trans. Pattern Anal. Mach. Intell. 1988, 10, 439–451. [Google Scholar] [CrossRef]
- Wu, T.P.; Tang, C.K. Dense Photometric Stereo Using a Mirror Sphere and Graph Cut. In Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR), San Diego, CA, USA, 20–25 June 2005; Volume 1, pp. 140–147. [Google Scholar]
- Malis, E.; Vargas, M. Deeper Understanding of the Homography Decomposition for Vision-Based Control; Research Report RR-6303; INRIA: Rocquencourt, France, 25 September 2007. [Google Scholar]
- Köser, K. Geometric Estimation with Local Affine Frames and Free-form Surfaces. Ph.D. Thesis, Christian-Albrechts-Universität zu Kiel, Kiel, Germany, 2008. [Google Scholar]
- Barath, D.; Molnar, J.; Hajder, L. Novel Methods for Estimating Surface Normals from Affine Transformations. In Communications in Computer and Information Science; Braz, J., Pettré, J., Richard, P., Kerren, A., Linsen, L., Battiato, S., Imai, F., Eds.; Springer International Publishing: Cham, Switzerland, 2016; pp. 316–337. [Google Scholar]
- Eigen, D.; Fergus, R. Predicting Depth, Surface Normals and Semantic Labels with a Common Multi-Scale Convolutional Architecture. In Proceedings of the 2015 IEEE International Conference on Computer Vision (ICCV), Santiago, Chile, 7–13 December 2015. [Google Scholar]
- Wu, C.; Wilburn, B.; Matsushita, Y.; Theobalt, C. High-Quality Shape from Multi-View Stereo and Shading Under General Illumination. In Proceedings of the 2011 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Colorado Springs, CO, USA, 20–25 June 2011; pp. 969–976. [Google Scholar]
- Zhang, L.; Curless, B.; Hertzmann, A.; Seitz, S.M. Shape and Motion under Varying Illumination: Unifying Structure from Motion, Photometric Stereo, and Multi-view Stereo. In Proceedings of the 9th IEEE International Conference on Computer Vision, Nice, France, 13–16 October 2003; pp. 618–625. [Google Scholar]
- Joshi, N.; Kriegman, D.J. Shape from Varying Illumination and Viewpoint. In Proceedings of the 2007 IEEE 11th International Conference on Computer Vision, Rio de Janeiro, Brazil, 14–21 October 2007; pp. 1–7. [Google Scholar]
- Esteban, C.H.; Vogiatzis, G.; Cipolla, R. Multiview Photometric Stereo. IEEE Trans. Pattern Anal. Mach. Intell. 2008, 30, 548–554. [Google Scholar] [CrossRef] [PubMed]
- Nehab, D.; Rusinkiewicz, S.; Davis, J.; Ramamoorthi, R. Efficiently Combining Positions and Normals for Precise 3D Geometry. ACM Trans. Graph. 2005, 24, 536–543. [Google Scholar] [CrossRef]
- Haque, S.M.; Chatterjee, A.; Govindu, V.M. High Quality Photometric Reconstruction Using a Depth Camera. In Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 2283–2290. [Google Scholar]
- Park, J.; Sinha, S.N.; Matsushita, Y.; Tai, Y.W.; Kweon, I.S. Robust Multiview Photometric Stereo Using Planar Mesh Parameterization. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 1591–1604. [Google Scholar] [CrossRef] [PubMed]
- Han, Y.; Lee, J.Y.; Kweon, I.S. High Quality Shape from a Single RGB-D Image under Uncalibrated Natural Illumination. In Proceedings of the 2013 IEEE International Conference on Computer Vision, Sydney, NSW, Australia, 1–8 December 2013; pp. 1617–1624. [Google Scholar]
- Chatterjee, A.; Govindu, V.M. Photometric refinement of depth maps for multi-albedo objects. In Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015; pp. 933–941. [Google Scholar]
- Shi, B.; Inose, K.; Matsushita, Y.; Tan, P.; Yeung, S.K.; Ikeuchi, K. Photometric Stereo Using Internet Images. In Proceedings of the 2014 2nd International Conference on 3D Vision, Tokyo, Japan, 8–11 December 2014. [Google Scholar]
- Yu, H. Edge-preserving Photometric Stereo via Depth Fusion. In Proceedings of the 2012 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), CVPR ’12, Providence, RI, USA, 16–21 June 2012; IEEE Computer Society: Washington, DC, USA, 2012; pp. 2472–2479. [Google Scholar]
- Ti, C.; Yang, R.; Davis, J.; Pan, Z. Simultaneous Time-of-Flight sensing and photometric stereo with a single ToF sensor. In Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015; pp. 4334–4342. [Google Scholar]
- Yu, L.F.; Yeung, S.K.; Tai, Y.W.; Lin, S. Shading-Based Shape Refinement of RGB-D Images. In Proceedings of the 2013 IEEE Conference on Computer Vision and Pattern Recognition, CVPR’13, Portland, OR, USA, 23–28 June 2013; IEEE Computer Society: Washington, DC, USA, 2013; pp. 1415–1422. [Google Scholar]
- Wu, C.; Zollhöfer, M.; Nießner, M.; Stamminger, M.; Izadi, S.; Theobalt, C. Real-Time Shading-Based Refinement for Consumer Depth Cameras. ACM Trans. Graph. 2014, 33. [Google Scholar] [CrossRef]
- Kadambi, A.; Taamazyan, V.; Shi, B.; Raskar, R. Polarized 3D: High-Quality Depth Sensing with Polarization Cues. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Santiago, Chile, 7–13 December 2015; pp. 3370–3378. [Google Scholar]
- Antensteiner, D.; Štolc, S.; Valentin, K.; Blaschitz, B.; Huber-Mörk, R.; Pock, T. High-Precision 3D Sensing with Hybrid Light Field and Photometric Stereo Approach in Multi-Line Scan Framework. In Proceedings of the IS&T International Symposium on Electronic Imaging: Intelligent Robotics and Industrial Applications using Computer Vision 2017, Burlingame, CA, USA, 29 January–2 February 2017. [Google Scholar]
- Horn, B.K.P.; Brooks, M.J. (Eds.) Shape from Shading; MIT Press: Cambridge, MA, USA, 1989. [Google Scholar]
- Štolc, S.; Soukup, D.; Holländer, B.; Huber-Mörk, R. Depth and All-In-Focus Imaging by a Multi-Line-Scan Light-Field Camera. J. Electron. Imaging 2014, 23, 19–23. [Google Scholar] [CrossRef]
- Kazhdan, M.; Bolitho, M.; Hoppe, H. Poisson Surface Reconstruction. In Proceedings of the Fourth Eurographics Symposium on Geometry Processing, SGP’06, Cagliari, Sardinia, 26–28 June 2006; Eurographics Association: Aire-la-Ville, Switzerland, 2006; pp. 61–70. [Google Scholar]
- Heber, S. Variational Shape from Unconventional Imaging Devices. Ph.D. Thesis, Graz University of Technology, Graz, Austria, 18 May 2015. [Google Scholar]
- Scherr, T. Gradient-Based Surface Reconstruction and the Application to Wind Waves. Master’s Thesis, Ruprecht-Karls-University Heidelberg, Heidelberg, Germany, 3 November 2017. [Google Scholar]
- Rostami, M.; Michailovich, O.; Wang, Z. Gradient-Based Surface Reconstruction Using Compressed Sensing. In Proceedings of the 2012 19th IEEE International Conference on Image Processing, Orlando, FL, USA, 30 September–3 October 2012; pp. 913–916. [Google Scholar]
- Harker, M.; O’Leary, P. Least Squares Surface Reconstruction from Measured Gradient Fields. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2008. CVPR 2008, Anchorage, AK, USA, 23–28 June 2008. [Google Scholar]
- Du, Z.; Robles-Kelly, A.; Lu, F. Robust Surface Reconstruction from Gradient Field Using the L1 Norm. In Proceedings of the 9th Biennial Conference of the Australian Pattern Recognition Society on Digital Image Computing Techniques and Applications (DICTA 2007), Glenelg, Australia, 3–5 December 2007; pp. 203–209. [Google Scholar]
- Agrawal, A.; Chellappa, R.; Raskar, R. An Algebraic Approach to Surface Reconstruction from Gradient Fields. In Proceedings of the Tenth IEEE International Conference on Computer Vision (ICCV’05), Beijing, China, 17–21 October 2005; Volume 1, pp. 174–181. [Google Scholar]
- Horn, B.K.P.; Brooks, M.J. The Variational Approach to Shape from Shading. Comput. Vis. Graph. Image Process. 1986, 33, 174–208. [Google Scholar] [CrossRef]
- Nesterov, Y.E. Introductory Lectures on Convex Optimization: A Basic Course; Kluwer Academic Publishers: Dordrecht, The Netherlands, 2003. [Google Scholar]
- Beck, A.; Teboulle, M. A Fast Iterative Shrinkage-Thresholding Algorithm for Linear Inverse Problems. SIAM J. Imaging Sci. 2009, 2, 183–202. [Google Scholar] [CrossRef]
- Bredies, K.; Kunisch, K.; Pock, T. Total Generalized Variation. SIAM J. Imaging Sci. 2010, 3, 492–526. [Google Scholar] [CrossRef]
- Chambolle, A.; Pock, T. An Introduction to Continuous Optimization for Imaging; Cambridge University Press: Cambridge, UK, 2016; Volume 25, pp. 161–319. [Google Scholar]
- The Stanford 3D Scanning Repository. Available online: http://graphics.stanford.edu/data/3Dscanrep/ (acccessed on 10 November 2017).
- Persistence of Vision Pty. Ltd. (2004) [Computer Software]. Available online: http://www.povray.org/download/(acccessed on 10 November 2017).
- Parikh, N.; Boyd, S. Proximal Algorithms; Now Publishers Inc.: Breda, The Netherlands, 2013. [Google Scholar]
- Chambolle, A.; Pock, T. A First-Order Primal-Dual Algorithm for Convex Problems with Applications to Imaging; Springer: Dordrecht, The Netherlands, 2011; Volume 40, pp. 120–145. [Google Scholar]
- Nesterov, Y. Smooth Minimization of Non-Smooth Functions. Math. Program. 2005, 103, 127–152. [Google Scholar] [CrossRef]
- Beck, A.; Teboulle, M. Gradient-Based Algorithms with Applications to Signal Recovery Problems; Cambridge University Press: Cambridge, UK, 2010; pp. 42–88. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Depth Penalty | Orientation Penalty | Balance at Flat Regions | Balance at Steep Regions |
|---|---|---|---|---|
| Surface orientation only | ✗ | Gradient-based | ✓ | ✗ |
| Gradient-based | ✓ | Gradient-based | ✓ | ✗ |
| Gradient-based | ✓ | Gradient-based + regularization with zero Laplace (Equation (23)) | ✓ | ✗ |
| Gradient-based | ✓ | Gradient-based + regularization with gradient (Equation (21)) | ✓ | ✗ |
| Method of Heber | ✓ | Scaled normal | ✓ | ✗ |
| Method of Nehab | ✓ | Projection of surface tangents to the given normal field | ✓ | ∽ |
| Generalized Nehab (ours) | ✓ | Projection of surface tangents to the given normal field with additional weighting | ✓ | ✓ |
| TGV (ours) | ✓ | Gradient-based + TGV | ✓ | ✓ |
| Gradient-Based | Dataset Method | Surface Orientation Only | Gradient Based | Gradient Based + Reg. with Laplacian Smoothness (Equation (23)) | Gradient Based + Reg. with Gradient (Equation (21)) | TGV (Ours) | |
|---|---|---|---|---|---|---|---|
| Depth [] | Dragon | 4.23 | 34.05 | 2.04 | 2.15 | 1.85 | 0.19 |
| Buddha | 4.85 | 117.29 | 2.12 | 2.25 | 2.01 | 0.22 | |
| Armadillo | 4.60 | 48.71 | 1.95 | 2.06 | 1.83 | 0.18 | |
| Average | 4.53 | 66.68 | 2.04 | 2.15 | 1.90 | 0.20 | |
| Normals [] | Dragon | 0.8226 | 0.2776 | 0.3344 | 0.3200 | 0.3017 | 0.0664 |
| Buddha | 0.8767 | 0.1922 | 0.2535 | 0.2339 | 0.2125 | 0.0668 | |
| Armadillo | 0.8611 | 0.2397 | 0.2973 | 0.2797 | 0.2599 | 0.0666 | |
| Average | 0.8535 | 0.2365 | 0.2951 | 0.2779 | 0.2580 | 0.0666 |
| Normal Based | Dataset Method | Method of Heber | Method of Nehab | Generalized Nehab (Ours) | |
|---|---|---|---|---|---|
| Depth [] | Dragon | 4.23 | 2.01 | 0.13 | 0.10 |
| Buddha | 4.85 | 1.60 | 0.15 | 0.12 | |
| Armadillo | 4.60 | 1.75 | 0.13 | 0.10 | |
| Average | 4.53 | 1.79 | 0.14 | 0.11 | |
| Normals [] | Dragon | 0.8226 | 0.3474 | 0.2941 | 0.2849 |
| Buddha | 0.8767 | 0.2579 | 0.2102 | 0.2013 | |
| Armadillo | 0.8611 | 0.3094 | 0.2553 | 0.2464 | |
| Average | 0.8535 | 0.3049 | 0.2532 | 0.2442 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Antensteiner, D.; Štolc, S.; Pock, T. A Review of Depth and Normal Fusion Algorithms. Sensors 2018, 18, 431. https://doi.org/10.3390/s18020431
Antensteiner D, Štolc S, Pock T. A Review of Depth and Normal Fusion Algorithms. Sensors. 2018; 18(2):431. https://doi.org/10.3390/s18020431
Chicago/Turabian StyleAntensteiner, Doris, Svorad Štolc, and Thomas Pock. 2018. "A Review of Depth and Normal Fusion Algorithms" Sensors 18, no. 2: 431. https://doi.org/10.3390/s18020431
APA StyleAntensteiner, D., Štolc, S., & Pock, T. (2018). A Review of Depth and Normal Fusion Algorithms. Sensors, 18(2), 431. https://doi.org/10.3390/s18020431